Tema 4 Álgebra Lineal Numérica - Ingeniería ... · Normas Librer as de Scilab >Qu e es un...
35
Introducci´on M´ etodos directos: Descomposici´on M´ etodos iterativos C´ alculo de autovalores Ejercicios Tema 4 ´ Algebra Lineal Num´ erica Angel Mora Bonilla, Emilio Mu˜ noz Velasco Departamento de Matem´ atica Aplicada Universidad de M´ alaga Escuela Polit´ ecnica Superior Angel Mora Bonilla, Emilio Mu˜ noz Velasco Tema 4 ´ Algebra Lineal Num´ erica
Transcript of Tema 4 Álgebra Lineal Numérica - Ingeniería ... · Normas Librer as de Scilab >Qu e es un...

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Tema 4Algebra Lineal Numerica
Angel Mora Bonilla, Emilio Munoz Velasco
Departamento de Matematica AplicadaUniversidad de Malaga
Escuela Politecnica Superior
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
¿Que es un Sistema Lineal?
Un sistema lineal de m ecuaciones con n incognitas puede serexpresado de la forma:
a1,1x1 + a1,2x2 + . . .+ a1,nxn = b1
a2,1x1 + a2,2x2 + . . .+ a2,nxn = b2
. . .am,1x1 + am,2x2 + . . .+ am,nxn = bm
o bien, en forma matricial A~x = ~b, donde A es una matriz m × n y~b es un vector columna con m componentes.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
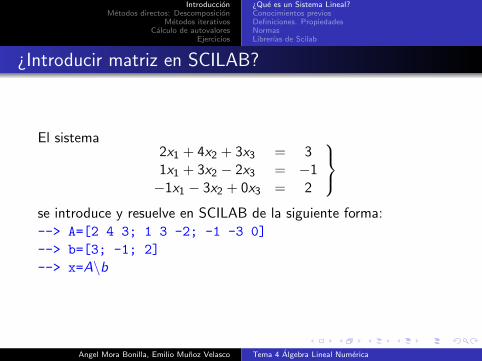
¿Introducir matriz en SCILAB?
El sistema2x1 + 4x2 + 3x3 = 31x1 + 3x2 − 2x3 = −1−1x1 − 3x2 + 0x3 = 2
se introduce y resuelve en SCILAB de la siguiente forma:--> A=[2 4 3; 1 3 -2; -1 -3 0]
--> b=[3; -1; 2]
--> x=A\b
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Conocimientos previos-I
Sistema Compatible Determinado (SCD): Solucion unica.
Sistema Compatible Indeterminado (SCI): Infinitassoluciones.
Sistema Incompatible (SI): No existe solucion.
Determinante de una matriz cuadrada y su calculo.--> det(A)
Rango de una matriz. Significado y calculo.
Matriz traspuesta.--> A’
Matriz inversa.--> inv(A)
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Conocimientos previos-II
Si A es una matriz cuadrada:
Matriz inversible: (∃A−1, |A| 6= 0)
Matriz singular: (6 ∃A−1, |A| = 0)
Matriz diagonal: i 6= j ⇒ ai ,j = 0
Matriz triangular superior: i > j ⇒ ai ,j = 0.
Matriz triangular inferior: i < j ⇒ ai ,j = 0.
Matriz simetrica: A = A′.
Autovalores y autovectores. Significado y calculo.--> [P,D]=spec(A)
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Propiedades
El producto de una matriz por su traspuesta siempre es unamatriz simetrica.
Los autovalores de una matriz simetrica siempre son reales.
Los autovalores de A’A siempre son no negativos.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Norma vectorial: Ejemplos
Las usuales son:
‖~x‖k = k
√|x1|k + |x2|k + . . . + |xn|k
de las que destacan:
Norma 1:‖~x‖1 = |x1|+ |x2|+ . . . + |xn| ⇒ ‖(−1, 3,−4)‖1 = 8.
Norma 2: ‖~x‖2 =√|x1|2 + |x2|2 + . . . + |xn|2 ⇒
‖(−1, 3,−4)‖2 =√
1 + 9 + 16.
Norma ∞: ‖~x‖∞ = max{|x1|, |x2|, . . . , |xn|} ⇒‖(−1, 3,−4)‖∞ = 4.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Radio espectral
Se define el Radio espectral de una matriz A como el modulo delautovalor con mayor modulo. Esto es:
ρ(A) = maxi|λi |
Ejemplo: Dada la matriz A =
(2 1−1 3
)resulta:
--> rad=max(abs(spec(A)))
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Normas matriciales usuales
Norma 1: ‖A‖1 = maxj∑
i |ai ,j |--> norm(A,1)
Norma ∞: ‖A‖∞ = maxi∑
j |ai ,j |--> norm(A,’inf’)
Norma 2: ‖A‖2 =√ρ(A′A)
--> norm(A,2)
--> norm(A)
En general, toda norma verifica ρ(B) ≤ ‖B‖.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Normas matriciales: Ejemplo
Ejemplo: Para la matriz A =
(−2 3 00 −1 1
)resulta:
‖A‖1 = max{2, 4, 1} = 4, ‖A‖∞ = max{5, 2} = 5
Para la norma 2: A′A =
4 −6 0−6 10 −10 −1 1
⇒ |A− λI | = 0⇒∣∣∣∣∣∣4− λ −6 0−6 10− λ −10 −1 1− λ
∣∣∣∣∣∣ = −λ3 + 15λ2 − 17λ = 0
⇒ λ1 = 0, λ2 ≈ 1,235, λ3 ≈ 13,765 luego‖A‖2 ≈
√13,765 ≈ 3,7101.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Sistemas Sobredeterminados y Vector Residuo
A los sistemas que no tienen solucion (incompatibles) se les llamatambien sistemas sobredeterminados.
Vector residuo: Se llama ası al vector ~r = A~x−~b.--> r=A*x-b
Si ~x es la solucion del sistema, el residuo es el vector cero, perono sera ası debido a los errores que siempre estaran presentes enlos calculos.Llamamos solucion de un sistema sobredeterminado al vectorx que minimize la norma 2 del vector residuo. Es decir, noexiste solucion y llamaremos ası a la “menos mala”.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
¿Que es un Sistema Lineal?Conocimientos previosDefiniciones. PropiedadesNormasLibrerıas de Scilab
Librerıa para Scilab de S.E.L.
prac1.sci
En este fichero se encuentra la librerıa de rutinas para la practicaprimera. Pasos para cargar la librerıa:
File - Change Directory. Cambiarse al directorio en el queesta la practica
File - Execute (seleccionar el fichero prac1.sci)
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
Metodos de Gauss y de Gauss-Jordan
Rutinas implementadas
Los metodos de Gauss implementados en Scilab son lossiguientes:
Metodos Gaussianos.
{Gauss, gauss.sci;Gauss Jordan, gaussjor.sci;
Para resolver un sistema Ax = B por Gauss en Scilab, hayintroducir previamente las matrices A y B, a continuacion hay queejecutar las siguientes ordenes:--> x=gauss(A,B)
--> residuo=A*x-B
--> norm(residuo)
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
Otras opciones
Hay otras formas de resolver un sistema de ecuaciones. Compararlos resultados.--> x1=inv(A)*B
--> x2=A\BConviene siempre comprobar el rango de A y de la ampliada paraver que tipo de sistema estamos resolviendo.--> rank(A), rank([A B])
--> det(A)
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
Ejemplo
--> A=[1 2 3; 3 4 5; 3 4 5]
--> b=[1 2 3]’
Si estudiamos rangos de A y de la matriz ampliada:--> rank(A)
ans =
2.
--> rrank([A b])
ans =
3.
El sistema por tanto es incompatible. Al intentar Gauss da error.--> x=gauss(A,b)
Probar las opciones:--> inv(A) ∗ B--> A\B
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
Metodo de Factorizacion QR
Dada una matriz A, la descompondremos en A = QR siendo Q unamatriz ortogonal (Q ′ = Q−1) y R una matriz triangular superior.
Para resolver A~x = ~b consideramosA~x = QR~x = ~b⇒ Q′QR~x = R~x = Q′~b. Ası:
1 Descomponemos la matriz A en el producto QR [Q,R]=qr(A)
2 Resuelvo R~x = Q ′~b. ~x = R \ Q ′ ∗ ~b
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
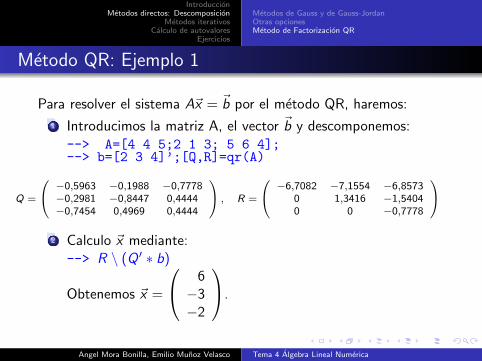
Metodo QR: Ejemplo 1
Para resolver el sistema A~x = ~b por el metodo QR, haremos:
1 Introducimos la matriz A, el vector ~b y descomponemos:--> A=[4 4 5;2 1 3; 5 6 4];--> b=[2 3 4]’;[Q,R]=qr(A)
Q =
−0,5963 −0,1988 −0,7778−0,2981 −0,8447 0,4444−0,7454 0,4969 0,4444
, R =
−6,7082 −7,1554 −6,85730 1,3416 −1,54040 0 −0,7778
2 Calculo ~x mediante:
--> R \ (Q ′ ∗ b)
Obtenemos ~x =
6−3−2
.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
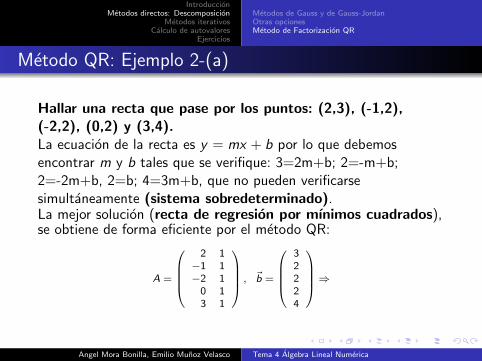
Metodo QR: Ejemplo 2-(a)
Hallar una recta que pase por los puntos: (2,3), (-1,2),(-2,2), (0,2) y (3,4).La ecuacion de la recta es y = mx + b por lo que debemosencontrar m y b tales que se verifique: 3=2m+b; 2=-m+b;2=-2m+b, 2=b; 4=3m+b, que no pueden verificarsesimultaneamente (sistema sobredeterminado).La mejor solucion (recta de regresion por mınimos cuadrados),se obtiene de forma eficiente por el metodo QR:
A =
2 1−1 1−2 1
0 13 1
, ~b =
32224
⇒
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Metodos de Gauss y de Gauss-JordanOtras opcionesMetodo de Factorizacion QR
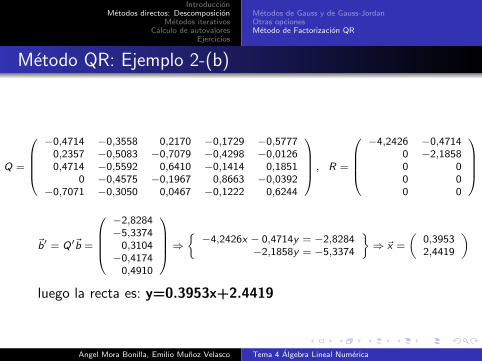
Metodo QR: Ejemplo 2-(b)
Q =
−0,4714 −0,3558 0,2170 −0,1729 −0,5777
0,2357 −0,5083 −0,7079 −0,4298 −0,01260,4714 −0,5592 0,6410 −0,1414 0,1851
0 −0,4575 −0,1967 0,8663 −0,0392−0,7071 −0,3050 0,0467 −0,1222 0,6244
, R =
−4,2426 −0,4714
0 −2,18580 00 00 0
~b′ = Q′~b =
−2,8284−5,3374
0,3104−0,4174
0,4910
⇒{−4,2426x − 0,4714y = −2,8284
−2,1858y = −5,3374
}⇒ ~x =
(0,39532,4419
)
luego la recta es: y=0.3953x+2.4419
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
Metodos iterativos.
Los metodos directos resultan, en general, inservibles paran > 50 incognitas porque propagan los errores.
Otro problema es que los metodos directos necesitanalmacenar la matriz A en memoria.
Los grandes sistemas de ecuaciones que surgen en la practica,tienen la matriz A esparcida (muchos coeficientes igual acero) y aunque existen metodos directos especiales,usualmente se resuelven por metodos iterativos.
Los metodos iterativos tienen la ventaja de no propagar elerror. La estimacion de la solucion obtenida ~x (k), puedeconsiderarse como vector inicial (sin errores) para la iteracionsiguiente k + 1.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
Convergencia y otros problemas asociados
Los metodos iterativos obtienen una estimacion de la solucion delsistema ~x (m+1) en funcion de las anteriores, en este caso solosera una funcion lineal de la anterior:
~x(m+1) = B~x(m) + C
donde B es la matriz del metodo y C es un vector.Los problemas asociados con los metodos iterativos son:
Convergencia Para que sea util debe ser convergente y ellımite ser la solucion del sistema.
Velocidad de convergencia: Interesa que converja lo masrapido posible.
Vector inicial: ¿Como se elige?.
Condicion de parada: ¿Cuando paramos de iterar?
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
Criterio de Convergencia
Un metodo iterativo de la forma: ~x(m+1) = B~x(m) + C,converge, si y solo si, ρ(B) < 1.
Tiene convergencia global, no depende del vector de inicio.
Una medida de la velocidad de convergencia nos la da el valorde ρ(B). Interesa que sea lo mas proximo a cero posible.
La solucion del sistema (~x∗), debe ser punto fijo del metodoiterativo ~x∗ = B~x∗ + C.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
Forma matricial del metodo de Jacobi
Consideremos la descomposicion A = D + L + R donde:
D= Matriz diagonal con la misma diagonal que A.
L= Matriz con todos los terminos nulos, excepto los que estan pordebajo de la diagonal en los que coincide con A.
R= Matriz con todos los terminos nulos, excepto los que seencuentran por encima de la diagonal en los que coincide con A.
Dado el sistema A~x = ~b ⇒ (D + L + R)~x = ~b ⇒D~x = −(L + R)~x + ~b ⇒ ~x = −D−1(L + R)~x + D−1~bEl metodo de Jacobi queda:
~x(m+1) = BJ~x(m) + CJ
con BJ = −D−1(L + R),CJ = D−1~b
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
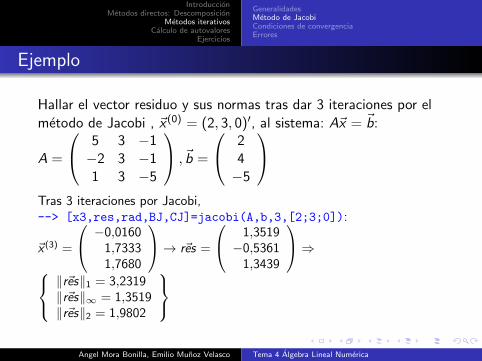
Ejemplo
Hallar el vector residuo y sus normas tras dar 3 iteraciones por el
metodo de Jacobi , ~x (0) = (2, 3, 0)′, al sistema: A~x = ~b:
A =
5 3 −1−2 3 −11 3 −5
,~b =
24−5
Tras 3 iteraciones por Jacobi,--> [x3,res,rad,BJ,CJ]=jacobi(A,b,3,[2;3;0]):
~x (3) =
−0,01601,73331,7680
→ ~res =
1,3519−0,5361
1,3439
⇒ ‖~res‖1 = 3,2319‖ ~res‖∞ = 1,3519‖ ~res‖2 = 1,9802
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
Condiciones de convergencia
La condicion necesaria y suficiente de convergencia deun metodo, es que el radio espectral de la matriz delmetodo sea menor que 1: ρ(B) < 1. Como para cualquiernorma, ρ(B) < ||B||, si ||B|| < 1 el metodo converge.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
Errores en los metodos iterativos
El error cometido en un metodo iterativo tras m iteraciones puedeacotarse mediante:
‖~x(m) −~x∗‖∞ = ‖∆~x(m)‖∞ ≤‖B‖m
∞‖~x(1) −~x(0)‖∞1− ‖B‖∞
donde B (‖B‖∞ < 1) es la matriz del metodo iterativo.De la formula anterior, podemos calcular el numero de iteracionesn necesario para obtener una solucion con un error determinado E :
m ≥ 1
log(‖B‖∞)
· log(E · (1− ‖B‖∞)
‖~x (1) − ~x (0)‖∞
)Estas formulas pueden dar problemas en el caso de que ‖B‖∞ seaproxima a 1.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
GeneralidadesMetodo de JacobiCondiciones de convergenciaErrores
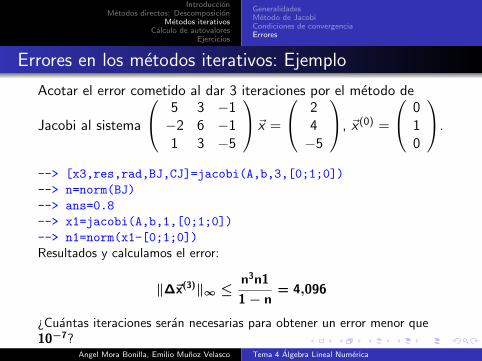
Errores en los metodos iterativos: Ejemplo
Acotar el error cometido al dar 3 iteraciones por el metodo de
Jacobi al sistema
5 3 −1−2 6 −11 3 −5
~x =
24−5
, ~x (0) =
010
.
--> [x3,res,rad,BJ,CJ]=jacobi(A,b,3,[0;1;0])
--> n=norm(BJ)
--> ans=0.8
--> x1=jacobi(A,b,1,[0;1;0])
--> n1=norm(x1-[0;1;0])
Resultados y calculamos el error:
‖∆~x(3)‖∞ ≤n3n1
1− n= 4,096
¿Cuantas iteraciones seran necesarias para obtener un error menor que10−7?
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Calculo de autovalores
Scilab calcula los autovalores de una matriz A con la ordenspec(A), si queremos ademas la matriz diagonal V y la matriz depaso X , escribiremos [X,V]=spec(A).
Un metodo iterativo para el calculo de autovalores se basa en ladescomposicion QR de la matriz A.
1 A0 = A2 Repetir:
[Q,R] = qr(Ai)Ai+1 = RQ
En Scilab el algoritmo esta implementado en el archivo francis.sci,ejecutarlo y luego introducir francis(A,n), siendo A la matriz departida y n el numero de iteraciones.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 1
Dado el sistema Ax=b, siendo:
A =
16 0 −1 0 −5 2 1 42 7 −2 0 3 0 −1 40 3 16 1 0 0 −1 44 2 0 20 4 0 0 4−1 −1 −1 5 11 1 0 4−1 −1 −1 −1 6 12 0 4
0 1 1 1 2 7 15 40 2 1 0 0 0 1 4
, b =
13−2
25630
(a) Iterar por el metodo de Jacobi (30 iteraciones, inicio el origen).
Estudiar previamente su convergencia y calcular las normas 1, 2, ∞del vector residuo.
(c) Acotar el error cometido.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 2
Dado el sistema Ax=b, siendo:
A =
1 −3 2 1 00 3 10 −1 21 10 30 −1 12 4 0 10 22 11 1 0 10
, b =
11211
(a) Estudiar la compatibilidad del sistema.
(b) Resolverlos por metodos directos e iterativos estudiados.
(c) Estudiar la convergencia de los metodos iterativos.
(d) Dar las iteraciones necesarias para obtener la solucion conerror menor que 10−6.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 3
Dado el sistema Ax = b, con
A =
4 −1 −2 0−1 4 0 −2−2 0 4 −10 −2 −1 4
; b =
400−4
Estudiar la convergencia de Jacobi y calcular el error cometido sidas 100 iteraciones.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 5
Dado el sistema Ax = b con:
A =
8,9988745 2,3214327 6,64233,1871123 4,42111111 −1,2222228,4364121 −8,62046793 16,9512661
; b =
10,9983091−6,877319242,62861406
.
(a) Resolver por los metodos QR, y Jacobi (100 iteraciones), estudiandopreviamente la convergencia.
(b) Calcular los residuos y comparar.
(c) Acotar el error cometido en cada uno.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 6
La ley de Kirchoff para el voltaje aplicado a un circuito produce elsiguiente sistema de ecuaciones:
(R1 + R3 + R4)I1+ R3I2+ R4I3 = E1
R3I1+ (R2 + R3 + R5)I2− R5I3 = E2
R4I1− R5I2+ (R4 + R5 + R6)I3 = 0
Calcular las intensidades de corriente I1, I2, I3 cuandoR1 = 1,R2 = 1,R3 = 2,R4 = 1,R5 = 2,R6 = 4 yE1 = 23,E2 = 29. Calcular tambien para E1 = 12,E2 = 21,5.Resolver por los distintos metodos estudiados, calcular errores ycomparar resultados.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica
IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 7
Dado el sistema Ax = b con
A = (aij) = 1/(i + j − 1); b = (bi ) = i2 − 3, (i , j = 1 . . . ..n).
(a) Resolver por un metodo directo y por un metodo iterativo conn = 8.
(b) Comparar resultados analizando el vector residuo, y su norma.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica

IntroduccionMetodos directos: Descomposicion
Metodos iterativosCalculo de autovalores
Ejercicios
Ejercicio 9
Calcular, si es posible, los autovalores de la matrices de losejercicios anteriores con la orden directa y con el algoritmo francis.
Angel Mora Bonilla, Emilio Munoz Velasco Tema 4 Algebra Lineal Numerica