Tes is Table Rosen Tren Adores
174
1 DISEÑO Y CONSTRUCCIÓN DE TABLEROS SIMULADORES PARA PLC SIEMENS S7-200 Y DESARROLLO DE GUÍA PARA LABORATORIO YERSON SANTIAGO IDÁRRAGA GÓMEZ ANDRÉS FELIPE NIÑO TABARES UNIVERSIDAD PONTIFICIA BOLIVARIANA ESCUELA DE INGENIERÍAS FACULTAD DE INGENIERÍA ELECTRÓNICA MEDELLÍN 2006
-
Upload
genaro-ivan-chavez-camacho -
Category
Documents
-
view
26 -
download
3
Transcript of Tes is Table Rosen Tren Adores

1
DISEÑO Y CONSTRUCCIÓN DE TABLEROS SIMULADORES PARA
PLC SIEMENS S7-200 Y DESARROLLO DE GUÍA PARA LABORATORIO
YERSON SANTIAGO IDÁRRAGA GÓMEZ
ANDRÉS FELIPE NIÑO TABARES
UNIVERSIDAD PONTIFICIA BOLIVARIANA
ESCUELA DE INGENIERÍAS
FACULTAD DE INGENIERÍA ELECTRÓNICA
MEDELLÍN
2006
2
DISEÑO Y CONSTRUCCIÓN DE TABLEROS SIMULADORES PARA PLC
SIEMENS S7-200 Y DESARROLLO DE GUÍA PARA LABORATORIO
ANDRÉS FELIPE NIÑO TABARES
YERSON SANTIAGO IDÁRRAGA GÓMEZ
Trabajo de grado para optar al título de Ingeniero Electrónico
Director
JORGE ANDRÉS VALENCIA GALLÓN
Ingeniero Electricista
UNIVERSIDAD PONTIFICIA BOLIVARIANA
ESCUELA DE INGENIERÍAS
FACULTAD DE INGENIERÍA ELECTRÓNICA
MEDELLÍN
2006
3
Nota de aceptación
_________________________
_________________________
_________________________
_________________________
_________________________
Presidente del jurado
_________________________
Jurado
_________________________
Jurado
Medellín, Septiembre de 2006
4
CONTENIDO
Pág
INTRODUCCIÓN
MARCO TEÓRICO
1.1 GENERALIDADES DE LOS PLC
1.1.1 Comentario preliminar
1.1.2 ¿Qué es un PLC?
1.1.3 Funcionamiento básico
1.1.4 Estructura interna
1.1.5 Algunas ventajas brindadas por el PLC
2. PROGRAMACIÓN DEL PLC
2.1 ELEMENTOS NECESARIOS
2.2 LENGUAJES DE PROGRAMACIÓN
2.2.1 Editor AWL (Lista de instrucciones)
2.2.2 Editor KOP (Esquema de contactos)
2.2.3 Editor FUP (Diagrama de funciones)
3. GUÍA PRELIMINAR PARA EL LABORATORIO DE
PLC
3.1 PLC SIEMENS S7 – 200
3.2 SOFTWARE
3.3 AJUSTAR LA VELOCIDAD DE TRANSMISIÓN
3.4 ¿CÓMO ESTABLECER LA COMUNICACIÓN CON
LA CPU S7-200?
3.5 ¿CÓMO CAMBIAR LOS PARÁMETROS DE
COMUNICACIÓN DE LA CPU?
3.6 PRUEBA DE FUNCIONAMIENTO
3.7 TRANSFERIR EL PROGRAMA AL PLC
3.8 INSTRUCCIONES Y COMANDOS LÓGICOS
9
11
11
11
11
13
15
16
17
17
18
18
19
21
22
22
23
23
24
26
27
28
29
5 4. DISEÑO FÍSICO Y CONSTRUCCIÓN DE LOS
TABLEROS
4.1 ESPECIFICACIONES CONSTRUCTIVAS
4.2 CANTIDAD Y TIPO DE ELEMENTOS
4.2.1 Contactores
4.2.2 Relé Térmico y Portarelé
4.2.3 Fusibles y Portafusibles cerámicos
4.2.4 Breaker
4.2.5 Pilotos Luminosos
4.2.6 Switchera y Pulsadores
4.3 MARCACIÓN Y CABLEADO
4.4 DISTRIBUCIÓN ESPACIAL DE LOS
ELEMENTOS
4.5 DIMENSIONES Y VISTAS DE LOS TABLEROS
4.5.1 Vista Frontal
4.5.2 Vista Lateral
4.5.3 Vista Posterior
4.6 PRESENTACIÓN FINAL DE TABLEROS
4.6.1 Imagen Frontal
4.6.2 Imagen Posterior
4.6.3 Imagen Lateral
4.7 DISTRIBUCIÓN ELÉCTRICA DE ELEMENTOS
4.7.1 Esquema de Conexiones PLC
4.7.2 Esquema de Conexiones Eléctricas
4.7.3 Esquema de Conexiones Fuente de Poder
4.7.4 Conexión Baquela Dieléctrica
4.8 LISTADO DE MATERIALES
4.8.1 Elementos Eléctricos
4.8.2 Elementos Adicionales
38
38
39
39
39
40
40
40
40
41
42
43
43
45
46
47
47
48
49
50
50
51
51
52
53
54
54
6 4.9 PRUEBAS Y SIMULACIONES
5. GUÍA DE PRÁCTICAS PARA EL LABORATORIO DE
PLC
5.1- INTRODUCCIÓN A LOS PLC Y AL STEP 7
5.2- ENCENDIDO DIRECTO Y APAGADO DE UN
MOTOR MEDIANTE AUTORRETENCIÓN
5.3- ENCENDIDO Y APAGADO DE UN MOTOR
MEDIANTE UN TELERRUPTOR
5.4- CONTROL DE DOS MOTORES POR MEDIO DE
PULSADORES DE MARCHA Y PARO
5.5- CONTROL DE UN GARAJE
5.6- CONTROL DE UN SEMÁFORO
5.7- CONTROL DE UN MOTOR TRIFÁSICO CON
DESCONEXIÓN TEMPORIZADA
5.8- CONTROL SIMULTÁNEO PARA DOS MOTORES
5.9- ARRANQUE ESTRELLA DELTA
5.10- CONTROL ELECTROMAGNÉTICO DE UN
MOTOR DE CA DE JAULA DE ARDILLA
5.11- ARRANQUE ESTRELLA DELTA Y FRENADO
ELECTROMAGNÉTICO
5.12- CONTROL PARA ESCALERA ELECTROMECÁNICA
5.13- CONTROL PARA UNA BANDA TRANSPORTADORA
5.14- CONTADOR DE OBJETOS PARA BANDA
TRANSPORTADORA
5.15- CONTROL FORWARD – REVERSE PARA UN
MOTOR AC DE JAULA DE ARDILLA
5.16- CONTROL ELECTROMAGNÉTICO PARA MOTOR DE
ROTOR DEVANADO CON CAMBIO DE VELOCIDAD
6. CONCLUSIONES
BIBLIOGRAFÍA
ANEXOS
55
56
58
60
63
66
69
72
75
78
81
84
87
90
93
96
99
102
105
107
108
7
LISTA DE ANEXOS
ANEXO A: ESPECIFICACIONES TÉCNICAS
PLC SIEMENS S7 – 200 CPU 226
ANEXO B: ESPECIFICACIONES TÉCNICAS DE LOS
COMPONENTES ELÉCTRICOS
ANEXO C: ESPECIFICACIONES TÉCNICAS
MÓDULO DE EXPANSIÓN EM 235
ANEXO D: A CERCA DEL TD - 200
TEXT DIPLAY
ANEXO E: COMPLEMENTO DE LA GUÍA,
PRÁCTICAS PID
ANEXO F: ANTEPROYECTO
TESIS DE GRADO
ANEXO G: ARTÍCULO PUBLICABLE
FORMATO INTERNACIONAL
Pág
108
117
119
130
151
160
169
8
RESUMEN
Mejorar el área de automatización de los Laboratorios de Ingeniería Eléctrica-
Electrónica de la Universidad Pontificia Bolivariana mediante la implementación de
un nuevo laboratorio basado en PLC constituye la motivación de este trabajo de
grado.
Este texto recopila los fundamentos principales que se utilizaron para la creación
de los módulos entrenadores para PLC; aspectos de diseño, construcción e
implementación son recreados en el mismo.
Manuales, guías de configuración y especificaciones de capacidad de los
diferentes elementos constitutivos hacen también parte fundamental.
Se configuran y desarrollan prácticas instructivas con variación en los niveles de
complejidad para la configuración y el aprovechamiento máximo de los módulos
construidos.
9
INTRODUCCIÓN
El desarrollo del trabajo de grado surge como respuesta a la necesidad de
implementar un laboratorio de PLC (Controladores Lógicos Programables), para
los Laboratorios de la Facultad de Ingeniería Eléctrica-Electrónica de la
Universidad Pontificia Bolivariana, en sus materias de Control y Laboratorio de
Control principalmente, aunque no de carácter excluyente para otras asignaturas
que también lo requieran, Máquinas y Laboratorio de Máquinas por nombrar
algunas, pueden participar de dicho laboratorio.
Automatización industrial, manejo de motores y bandas transportadoras entre
otros muchos procesos industriales son llevados a cabo por estos controladores a
diario en los diferentes estamentos de la industria, por tanto, los estudiantes no
pueden estar fuera de este conocimiento y deben poseer bases que les permitan
interactuar en el momento que lo requieran con estos dispositivos.
El trabajo de grado consta del diseño, implementación y la respectiva
documentación de cuatro simuladores o tableros para PLC. Además de una guía
de prácticas para la realización por parte de los estudiantes.
Dichos tableros presenta todos los elementos necesarios para realizar y/o simular
procesos industriales; PLC, contactores, pulsadores, protecciones como relé
térmico, breaker y fusibles, entre otros dispositivos, proveen gran versatilidad y
funcionalidad.
10 Para el diseño y la posterior implementación se buscó aprovechar al máximo los
elementos ya disponibles en los Laboratorios de la Facultad de Ingeniería
Eléctrica-Electrónica, así los tableros son compatibles con motores, tableros de
control y cables de conexión.
En la Facultad de Ingeniería Eléctrica-Electrónica se presenta un sólo
antecedente, el trabajo realizado por el Ingeniero Electrónico José Alberto Lema
en el año 2003, Entrenador para PLC.
A los cuatro tableros se les une el entrenador mencionado anteriormente, con lo
cual se define un importante Laboratorio de PLC para la Facultad.
11
1. MARCO TEÓRICO
1.1. GENERALIDADES DE LOS PLC
1.1.1 Comentario preliminar.
La presión existente por bajar los costos, la complejidad y los tiempos en los
procesos de control y producción hace que los PLC estén cada vez más
difundidos en las aplicaciones de automatización. También la rápida evolución de
la industria es un factor que requiere de estos dispositivos para resolver las tareas
de automatización.
Justamente el PLC que se maneja en éste trabajo (SIEMENS S7-200) conquista
cada vez más campos de aplicación, puesto que es muy potente, su precio es
sumamente atractivo y es fácil de usar.
1.1.2 ¿Qué es un PLC?
El PLC (controlador lógico programable) también llamado autómata programable
es un dispositivo electrónico programable, utilizado para cumplir funciones de
automatismos lógicos y control de procesos de manufactura en ambiente industrial
y tiempo real.
Anteriormente muchas de las tareas de control se solucionaban mediante relés y
contactores. Esto con frecuencia era bastante engorroso y se denominaba control
12 mediante lógica cableada. Se tenían que diseñar los diagramas de circuito,
especificar e instalar los componentes eléctricos, y crear listas de cableado.
Entonces se debía cablear los componentes necesarios para realizar una tarea
específica. Si se cometía un error, los cables tenían que volver a conectarse
correctamente. Un cambio en su función o una ampliación del sistema requería
grandes cambios en los componentes y su recableado.
Lo mismo, además de tareas más complejas, se puede hacer con un PLC. El
cableado entre dispositivos y los contactos entre relés se hacen en un programa
que se almacena en el la memoria del PLC. Aunque todavía se requiere el
cableado para conectar los dispositivos actuadores, sensores y demás, éste es
menos intensivo. La modificación de la aplicación y la corrección de errores son
más fáciles de realizar. Es más fácil crear y cambiar un programa en un PLC que
cablear y recablear un circuito.
Como controlador digital, es capaz de tomar decisiones lógicas, realizar funciones
combinatorias y secuénciales, contar, llevar control de tiempo, ejecutar
operaciones con operandos de uno o más bits, convertir códigos, comparar y
transferir información de diferentes tipos, etc.
Como controlador analógico, puede controlar procesos de una o más variables
siguiendo algoritmos de control clásico o de diseño especial, puede procesar
variables analógicas de entrada y de salida y puede realizar control no lineal.
Como dispositivo de interfase el PLC permite capturar información del mundo real
discreto y análogo, y devolver señales de ambas características.
Como sistema de adquisición de datos, el PLC puede llegar a recoger gran
cantidad de datos del mundo real, almacenándolos y procesándolos para ser
utilizados en los procesos de control y gestión.
13 Como parte de un sistema de comunicaciones el PLC se puede comunicar con
otros a su vez mediante el empleo de redes locales.
Como elemento de un sistema de inteligencia artificial se puede ver a un PLC
fácilmente detectando fallas y generando diagnostico.
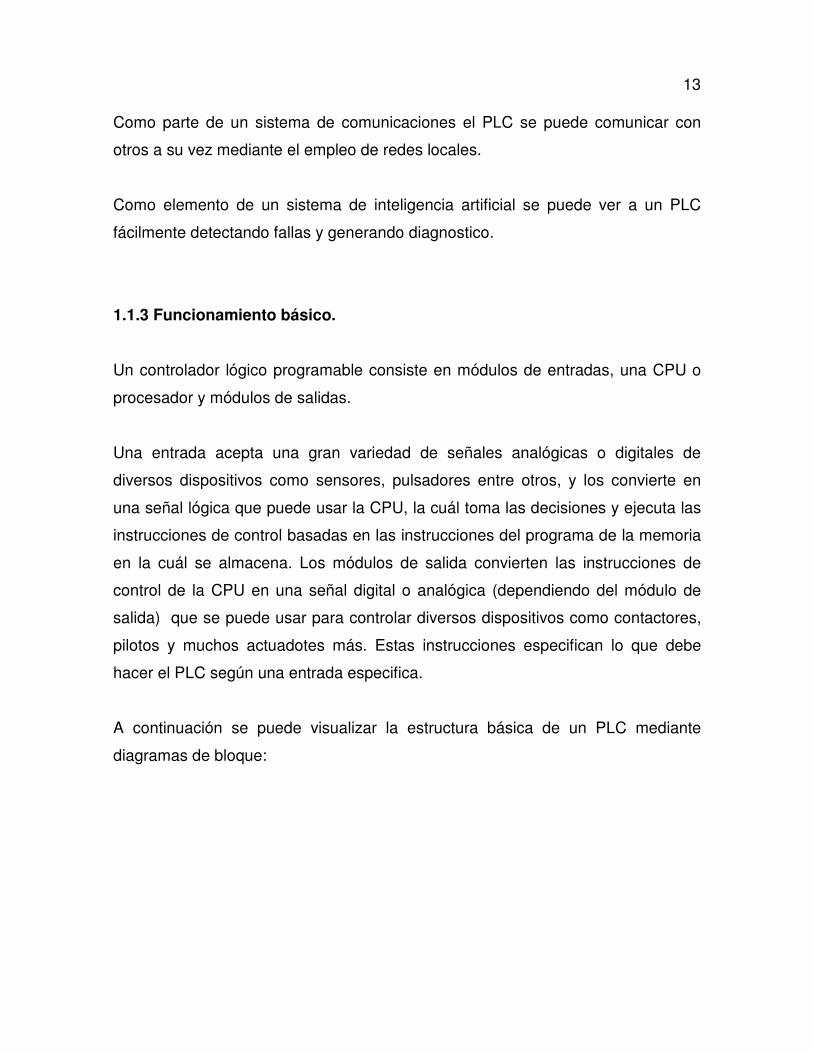
1.1.3 Funcionamiento básico.
Un controlador lógico programable consiste en módulos de entradas, una CPU o
procesador y módulos de salidas.
Una entrada acepta una gran variedad de señales analógicas o digitales de
diversos dispositivos como sensores, pulsadores entre otros, y los convierte en
una señal lógica que puede usar la CPU, la cuál toma las decisiones y ejecuta las
instrucciones de control basadas en las instrucciones del programa de la memoria
en la cuál se almacena. Los módulos de salida convierten las instrucciones de
control de la CPU en una señal digital o analógica (dependiendo del módulo de
salida) que se puede usar para controlar diversos dispositivos como contactores,
pilotos y muchos actuadotes más. Estas instrucciones especifican lo que debe
hacer el PLC según una entrada especifica.
A continuación se puede visualizar la estructura básica de un PLC mediante
diagramas de bloque:
14
Figura 1. Estructura básica de un PLC.
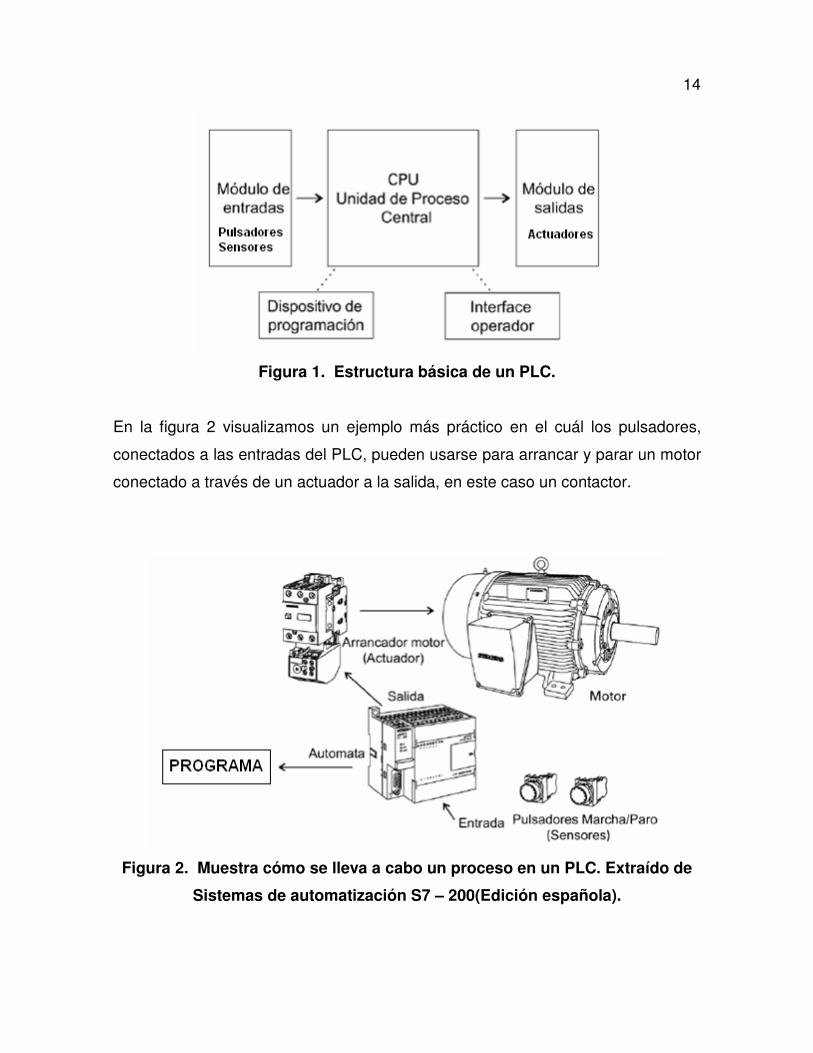
En la figura 2 visualizamos un ejemplo más práctico en el cuál los pulsadores,
conectados a las entradas del PLC, pueden usarse para arrancar y parar un motor
conectado a través de un actuador a la salida, en este caso un contactor.
Figura 2. Muestra cómo se lleva a cabo un proceso en un PLC. Extraído de
Sistemas de automatización S7 – 200(Edición española).
15 - El PLC lee el estado de las entradas (Pulsadores).
- El programa almacenado en el PLC utiliza las entradas para evaluar la
lógica. Durante la ejecución del programa, el PLC actualiza los datos.
- El PLC escribe los datos en las salidas y arranca el motor mediante el
contactor.
1.1.4 Estructura interna.
Al igual que la mayoría de los sistemas que se basan en procesadores, los PLC
cuentan con elementos internos similares como lo son: Procesador o CPU,
memorias internas, memorias de programas, interfaces de entrada y salida, buses
de direccionamiento y de datos, puertos, periféricos y fuente.
El secuenciador en este caso estará conformado por las interfaces tanto de
entrada como de salida, al igual que por la CPU o procesador.
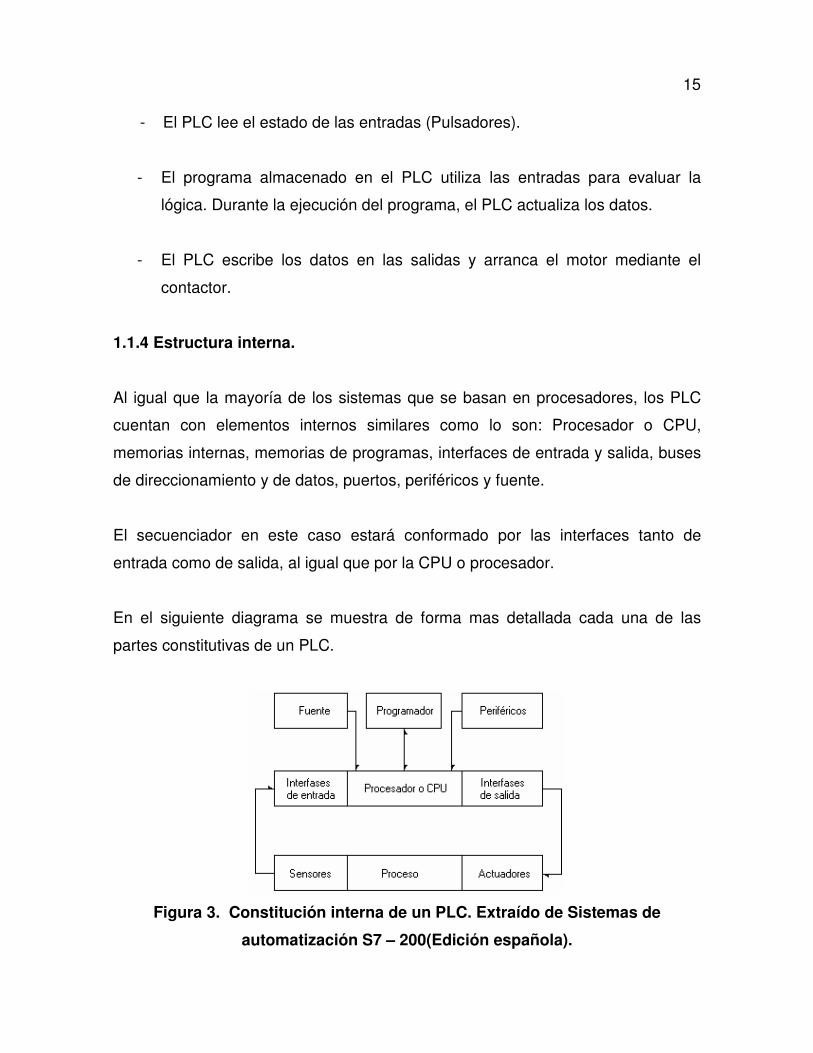
En el siguiente diagrama se muestra de forma mas detallada cada una de las
partes constitutivas de un PLC.
Figura 3. Constitución interna de un PLC. Extraído de Sistemas de
automatización S7 – 200(Edición española).
16
- La CPU realiza operaciones de tiempo (ya sea trabajando con retardos o
temporizando), de secuencia, de combinación, de automantenimiento y
retención.
- Interfaces de entrada y salida que establecen la comunicación entre la CPU
y el proceso, cumpliendo funciones tales como: filtrado, adaptación y
codificación de las señales de entrada, decodificación y amplificación de las
señales de salida que se han generado durante la ejecución del programa.
- La Memoria que permite el almacenamiento de datos del programa (RAM),
el sistema operativo (ROM), el programa de usuario (RAM no volátil o
EEPROM), configuración de PLC (ROM o RAM no volátil para parámetros
configurables), rutinas de arranque (ROM) y rutinas de chequeo (ROM).
- El programador es el dispositivo mediante el cual es posible introducir al
PLC el programa previamente ya elaborado con el fin de controlar el
proceso o los procesos elegidos. Este es interfase entre el procesador y el
usuario. Está constituido principalmente por un display, un teclado con
comandos lógicos y de servicio.
- Los periféricos en un PLC son empleados para hacer una supervisión del
proceso, ninguno de estos forma parte del circuito interno del PLC; algunos
de estos son: monitor de vídeo, impresora, unidad de disco, leds, teclados;
etc.
1.1.5 Algunas ventajas brindadas por el PLC.
- Menor tamaño físico que las soluciones de cableado
- La realización de cambios es más fácil y más rápida.
- Los autómatas llevan integradas funciones de diagnóstico.
17
2. PROGRAMACIÓN DEL PLC.
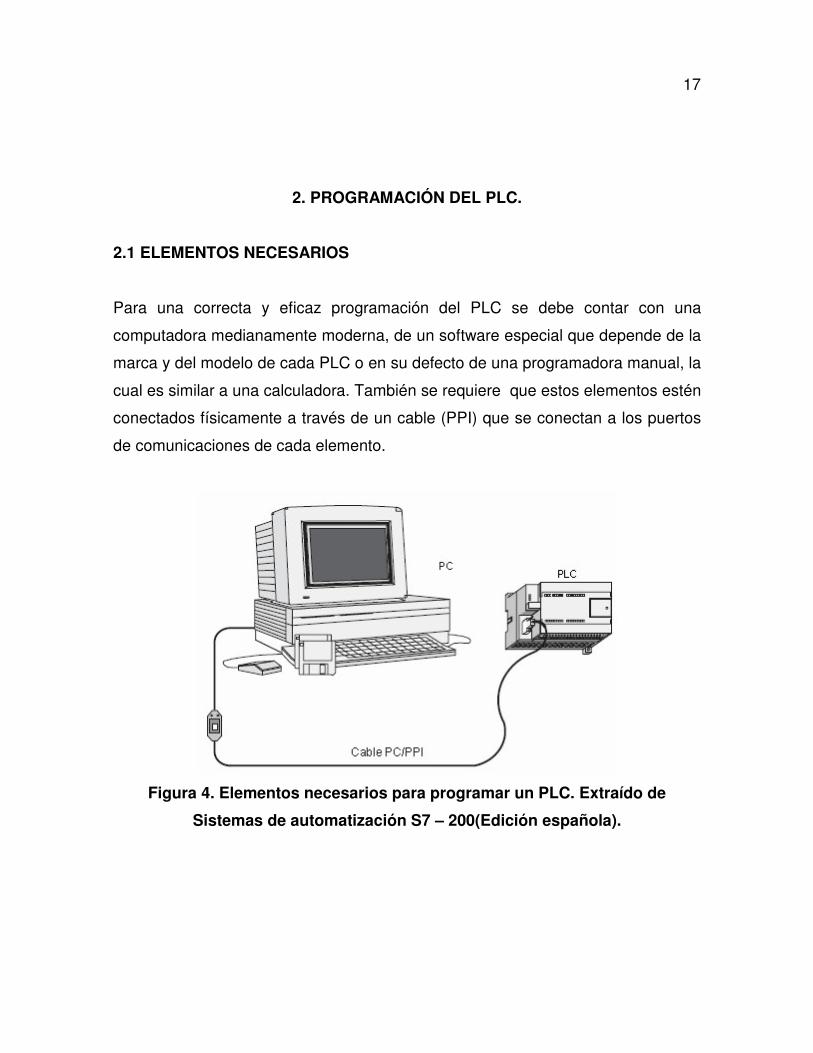
2.1 ELEMENTOS NECESARIOS
Para una correcta y eficaz programación del PLC se debe contar con una
computadora medianamente moderna, de un software especial que depende de la
marca y del modelo de cada PLC o en su defecto de una programadora manual, la
cual es similar a una calculadora. También se requiere que estos elementos estén
conectados físicamente a través de un cable (PPI) que se conectan a los puertos
de comunicaciones de cada elemento.
Figura 4. Elementos necesarios para programar un PLC. Extraído de
Sistemas de automatización S7 – 200(Edición española).
18 2.2 LENGUAJES DE PROGRAMACIÓN.
Los lenguajes empleados en la programación de los PLC son distintos y variados;
luego, la norma IEC 1131 los estableció en cinco lenguajes específicos, los cuales
son:
- Diagrama de funciones secuénciales (FBD).
- Diagrama de bloques.
- Diagramas de escalera (LD).
- Lenguajes estructurados.
- Lista de instrucciones.
Siendo dentro de estos los más comunes y utilizados actualmente (los que se
utilizaran en el laboratorio):
- AWL (Lista de instrucciones). Similar a Assembler.
- KOP (Esquema de contactos). Editor LD (Diagrama de escalera)
- FUP (Diagrama de funciones) Editor FBD (Diagrama de bloques
funcionales)
2.2.1 Editor AWL (Lista de instrucciones).
El editor AWL (Lista de instrucciones) permite crear programas de control
introduciendo la nemotécnica de las operaciones. Por lo general, el editor AWL se
adecua especialmente para los programadores expertos ya familiarizados con los
sistemas de automatización y con la programación lógica. El editor AWL también
permite crear ciertos programas que, de otra forma, no se podrían programar con
los editores KOP ni FUP. Ello se debe a que AWL es el lenguaje nativo de la CPU,
19 a diferencia de los editores gráficos en los que son aplicables ciertas restricciones
para poder dibujar los diagramas correctamente.
A continuación se muestra un ejemplo de un programa AWL. NETWORK
LD I0.0
LD I0.1
LD I2.0
A I2.1
OLD
ALD
= Q5.0
Como podemos observar, este lenguaje es similar a assembler. A continuación se indican los aspectos principales a considerar cuando se desee
utilizar el editor AWL:
- El lenguaje AWL es más apropiado para los programadores expertos.
- En algunos casos, AWL permite solucionar problemas que no se podrían
resolver muy fácilmente con los editores KOP o FUP.
2.2.2 Editor KOP (Esquema de contactos). El editor KOP (Esquema de contactos) permite crear programas con componentes
similares a los elementos de un esquema de circuitos. KOP es probablemente el
lenguaje predilecto de numerosos programadores y encargados del mantenimiento
de sistemas de automatización. Básicamente, los programas KOP hacen que la
CPU emule la circulación de corriente eléctrica desde una fuente de alimentación,
a través de una serie de condiciones lógicas de entrada que, a su vez, habilitan
condiciones lógicas de salida. Por lo general, la lógica se divide en unidades
pequeñas y de fácil comprensión llamadas “segmentos” o “networks”. El programa
se ejecuta segmento por segmento, de izquierda a derecha y luego de arriba a
abajo. Tras alcanzar la CPU el final del programa, comienza nuevamente en la
primera operación del mismo.
20
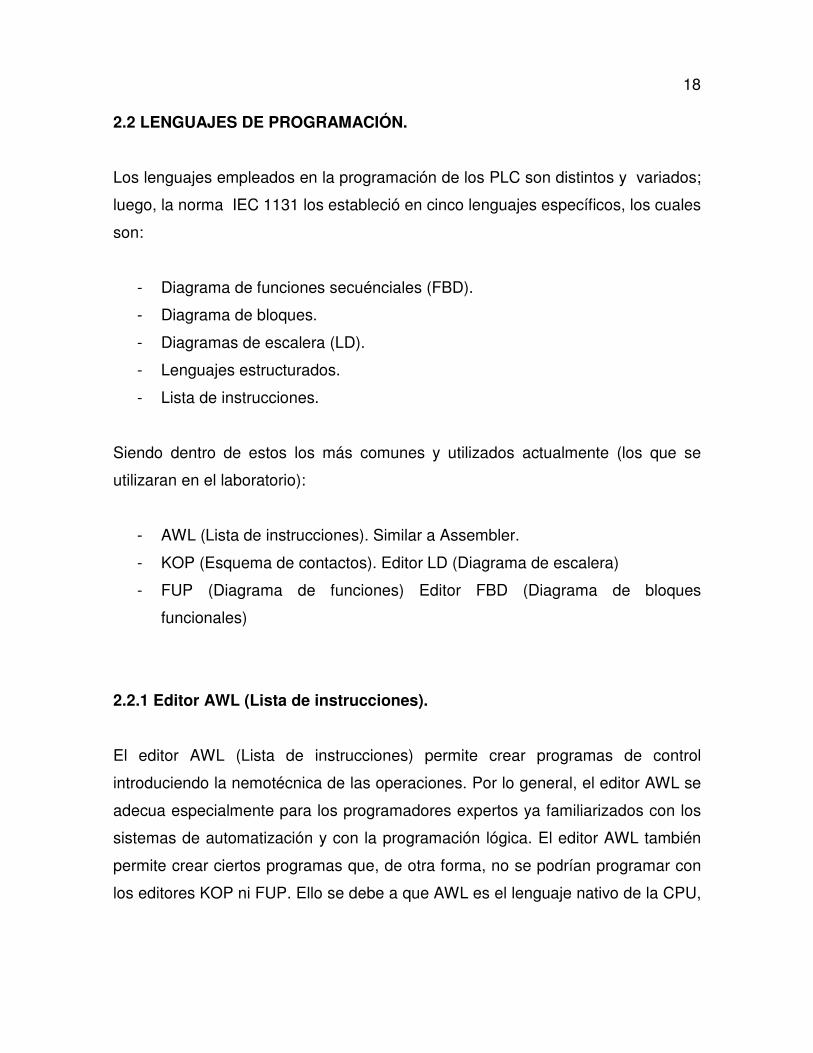
Figura 5. Esquema de programación en KOP. Extraído del Manual del
sistema de automatización del SIMATIC S7 - 200 SIEMENS.
Las operaciones se representan mediante símbolos gráficos que incluyen tres
formas básicas. Como muestra la figura 5, se pueden conectar en serie incluso
varias operaciones de cuadros.
- Contactos: representan condiciones lógicas de “entrada” tales como
interruptores, botones, condiciones internas, etc.
- Bobinas: representan condiciones lógicas de “salida” tales como lámparas,
contactores, relés interpuestos, condiciones internas de salida, etc.
- Cuadros: representan operaciones adicionales tales como temporizadores,
contadores u operaciones aritméticas.
A continuación se indican los aspectos principales a considerar cuando se desee
utilizar el editor KOP:
- El lenguaje KOP les facilita el trabajo a los programadores principiantes.
- La representación gráfica es a menudo fácil de comprender, siendo popular
en el mundo entero.
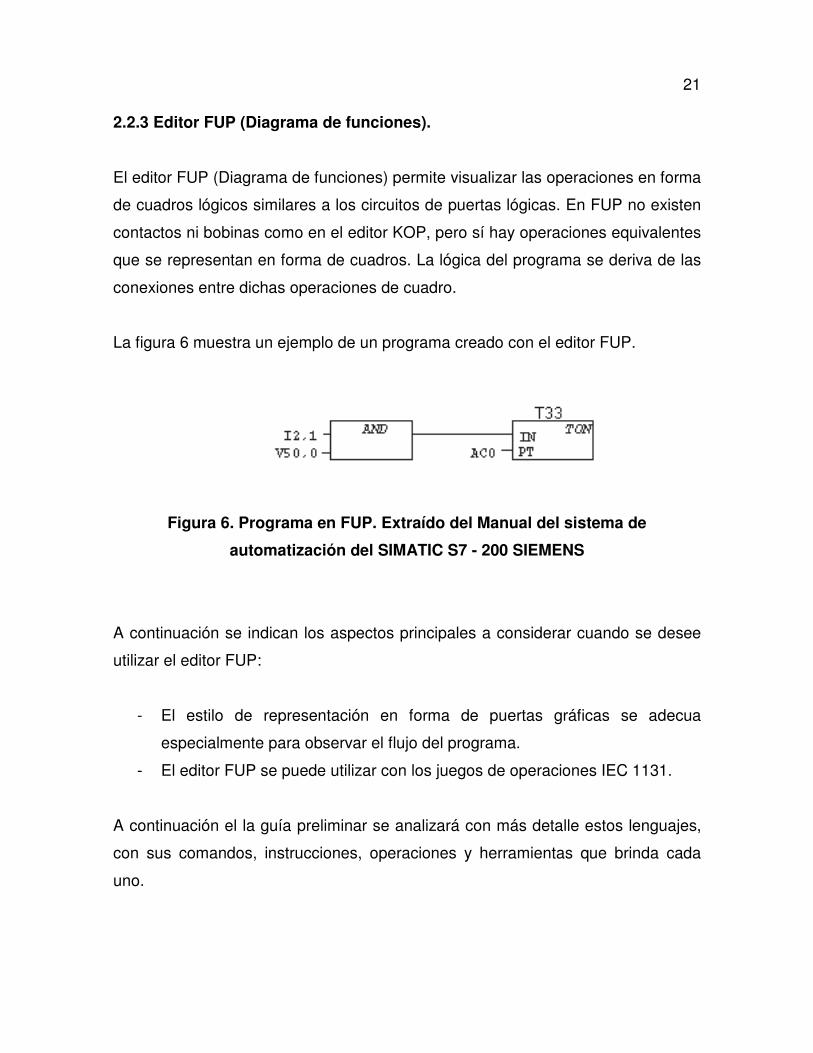
21 2.2.3 Editor FUP (Diagrama de funciones).
El editor FUP (Diagrama de funciones) permite visualizar las operaciones en forma
de cuadros lógicos similares a los circuitos de puertas lógicas. En FUP no existen
contactos ni bobinas como en el editor KOP, pero sí hay operaciones equivalentes
que se representan en forma de cuadros. La lógica del programa se deriva de las
conexiones entre dichas operaciones de cuadro.
La figura 6 muestra un ejemplo de un programa creado con el editor FUP.
Figura 6. Programa en FUP. Extraído del Manual del sistema de
automatización del SIMATIC S7 - 200 SIEMENS
A continuación se indican los aspectos principales a considerar cuando se desee
utilizar el editor FUP:
- El estilo de representación en forma de puertas gráficas se adecua
especialmente para observar el flujo del programa.
- El editor FUP se puede utilizar con los juegos de operaciones IEC 1131.
A continuación el la guía preliminar se analizará con más detalle estos lenguajes,
con sus comandos, instrucciones, operaciones y herramientas que brinda cada
uno.
22
3. GUÍA PRELIMINAR PARA EL LABORATORIO DE PLC
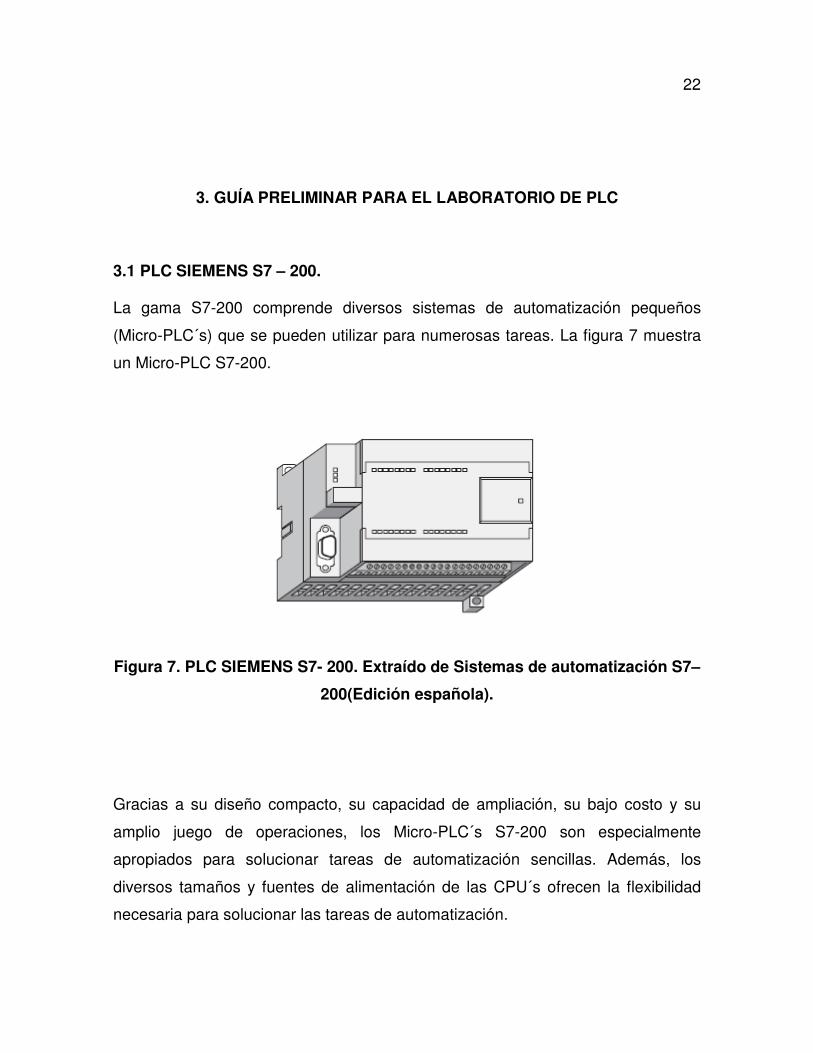
3.1 PLC SIEMENS S7 – 200. La gama S7-200 comprende diversos sistemas de automatización pequeños
(Micro-PLC´s) que se pueden utilizar para numerosas tareas. La figura 7 muestra
un Micro-PLC S7-200.
Figura 7. PLC SIEMENS S7- 200. Extraído de Sistemas de automatización S7–
200(Edición española).
Gracias a su diseño compacto, su capacidad de ampliación, su bajo costo y su
amplio juego de operaciones, los Micro-PLC´s S7-200 son especialmente
apropiados para solucionar tareas de automatización sencillas. Además, los
diversos tamaños y fuentes de alimentación de las CPU´s ofrecen la flexibilidad
necesaria para solucionar las tareas de automatización.
23 El PLC a utilizar en el laboratorio el S7 – 200 CPU 226, el cual consta de 24
entradas y 16 salidas digitales con posibilidad de adaptar módulos de ampliación
para entradas y salidas análogas.
3.2 SOFTWARE.
El software utilizado para la elaboración de programas y programación del PLC es
el STEP 7-Micro/WIN 32 el cual es un programa de fácil manipulación y
versatilidad a la hora de usarlo.
STEP 7-Micro/WIN cuenta con un sistema de ayuda online muy efectivo, tal como
ya se conoce de otras aplicaciones Windows. Mediante el menú Ayuda recibe
informaciones entre otras sobre el Contenido o los Juegos de operaciones de
STEP 7-Micro/WIN.
Si se dispone de acceso a Internet, en la opción S7-200 en el Web del menú
Ayuda podrá consultar y descargar a través de Internet informaciones, datos de
catálogo, ejemplos y consejos.
3.3 AJUSTAR LA VELOCIDAD DE TRANSMISIÓN.
- El cable PC/PPI conecta el PC con el PLC S7-200.
- En el PC, utilizar la interfase serie por ejemplo COM2.
- El S7-200 emite y recibe datos a una velocidad de 9600 bits/s. Hacer el
ajuste de la velocidad de transmisión en el cable PC/PPI de acuerdo a la
figura 8. A continuación, conectar el cable PC/PPI en el PC y el PLC
24
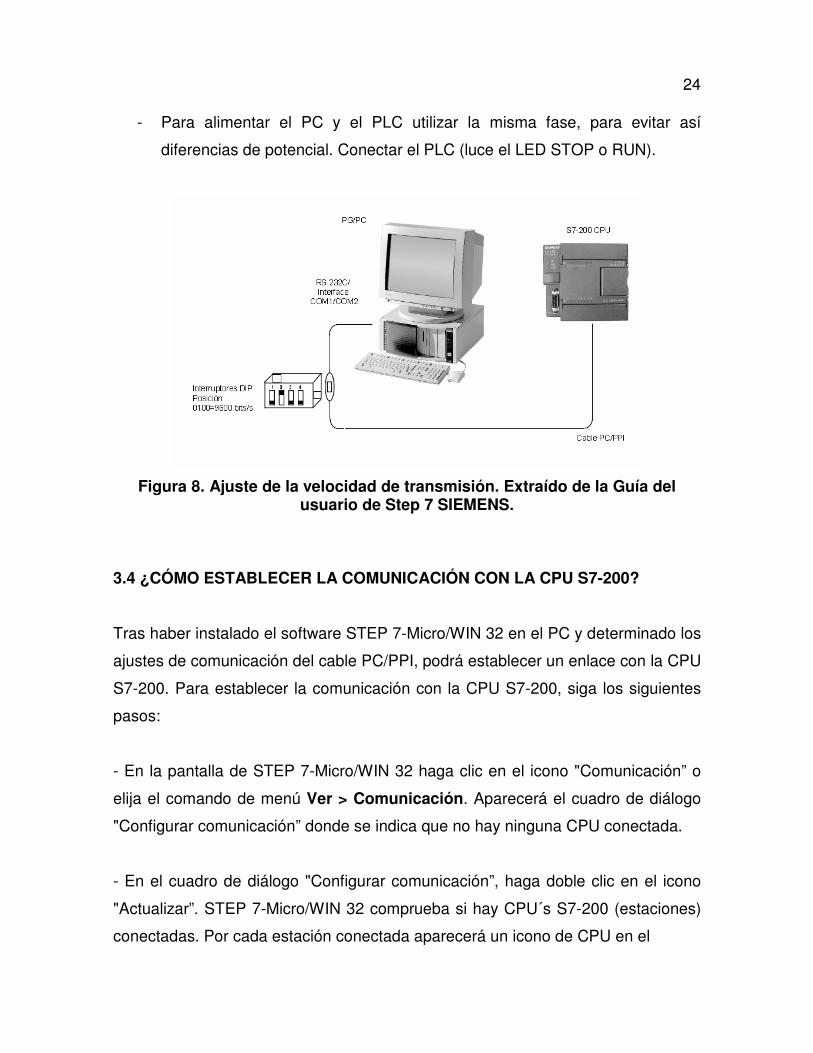
- Para alimentar el PC y el PLC utilizar la misma fase, para evitar así
diferencias de potencial. Conectar el PLC (luce el LED STOP o RUN).
Figura 8. Ajuste de la velocidad de transmisión. Extraído de la Guía del usuario de Step 7 SIEMENS.
3.4 ¿CÓMO ESTABLECER LA COMUNICACIÓN CON LA CPU S7-200? Tras haber instalado el software STEP 7-Micro/WIN 32 en el PC y determinado los
ajustes de comunicación del cable PC/PPI, podrá establecer un enlace con la CPU
S7-200. Para establecer la comunicación con la CPU S7-200, siga los siguientes
pasos:
- En la pantalla de STEP 7-Micro/WIN 32 haga clic en el icono "Comunicación” o
elija el comando de menú Ver > Comunicación. Aparecerá el cuadro de diálogo
"Configurar comunicación” donde se indica que no hay ninguna CPU conectada.
- En el cuadro de diálogo "Configurar comunicación”, haga doble clic en el icono
"Actualizar”. STEP 7-Micro/WIN 32 comprueba si hay CPU´s S7-200 (estaciones)
conectadas. Por cada estación conectada aparecerá un icono de CPU en el
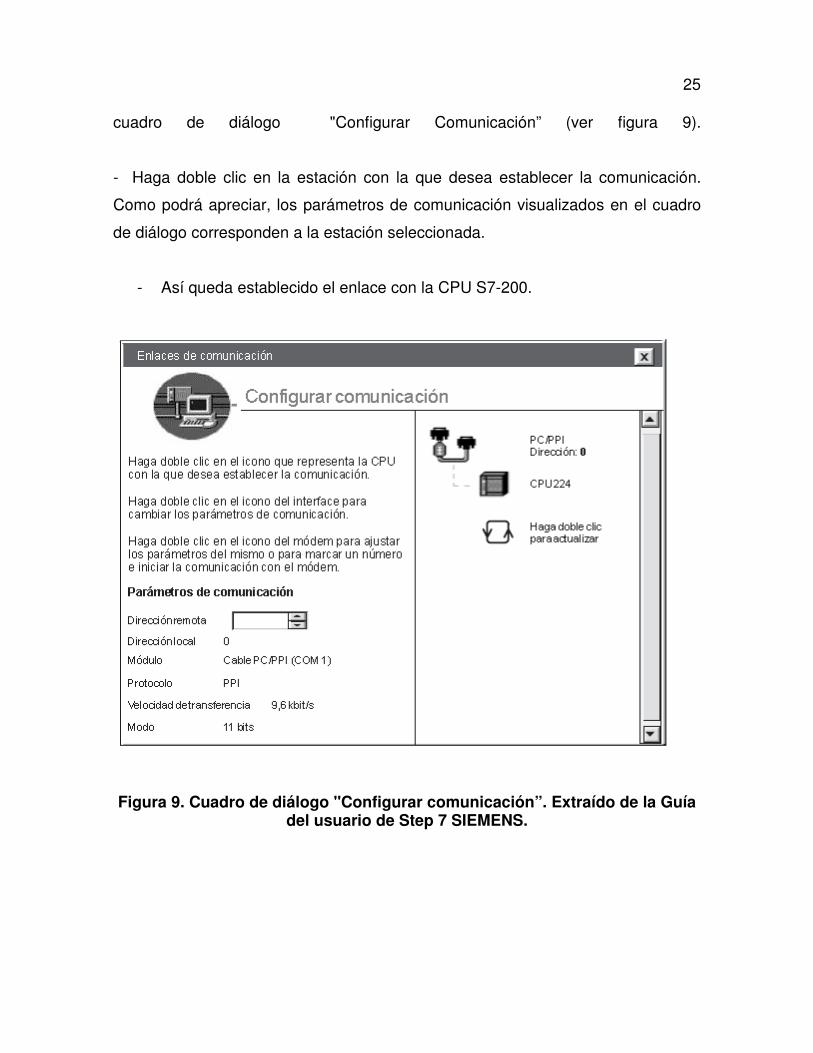
25 cuadro de diálogo "Configurar Comunicación” (ver figura 9).
- Haga doble clic en la estación con la que desea establecer la comunicación.
Como podrá apreciar, los parámetros de comunicación visualizados en el cuadro
de diálogo corresponden a la estación seleccionada.
- Así queda establecido el enlace con la CPU S7-200.
Figura 9. Cuadro de diálogo "Configurar comunicación”. Extraído de la Guía del usuario de Step 7 SIEMENS.
26 3.5 ¿CÓMO CAMBIAR LOS PARÁMETROS DE COMUNICACIÓN DE LA CPU?
Tras haber establecido un enlace con la CPU S7-200 puede verificar o cambiar los
parámetros de comunicación de la CPU.
Para cambiar los parámetros de comunicación, establezca los siguientes pasos:
1. Haga clic sobre el icono de comunicación en la barra de navegación.
2. Compruebe los valores de configuración ajustados para la comunicación:
• Dirección: 0
• Velocidad de transferencia: 9.6 kb/s
• Puerto COM: 2
3. Haga doble clic en el campo destinado a actualizar la comunicación. Con
ello, la CPU conectada debería reconocerse y registrarse automáticamente.
4. Si la CPU no se reconoce o aparece una información relativa a que no es
posible establecer la comunicación, haga doble clic en el campo Cable PPI.
5. En la opción Puerto PG/PC, seleccione Cable PC/PPI y sus propiedades.
6. En la ventana PPI ajuste la dirección de CPU a 2 y una velocidad de 9,6
kbits/s. En la ventana Conexión local seleccione el puerto (interface) en el
que ha conectado el cable PC/PPI. Confirme cada ventana pulsando en
Aceptar.
7. En la ventana Enlaces de comunicación, haga de nuevo doble clic en el
campo destinado a actualizar la comunicación. Con ello la CPU se
reconoce y registra de forma automática. Esta operación puede durar
27
algunos segundos. Cierre seguidamente la ventana de los enlaces de
comunicación.
3.6 PRUEBA DE FUNCIONAMIENTO.
1. Pase el selector de modo de operación del PLC a la posición TERM o RUN.
Dicho selector se encuentra bajo una pequeña tapa en el lado frontal de la
CPU. El estado operativo (RUN o STOP) sólo puede cambiarse desde el
PC/PG si el selector está en la posición TERM o RUN.
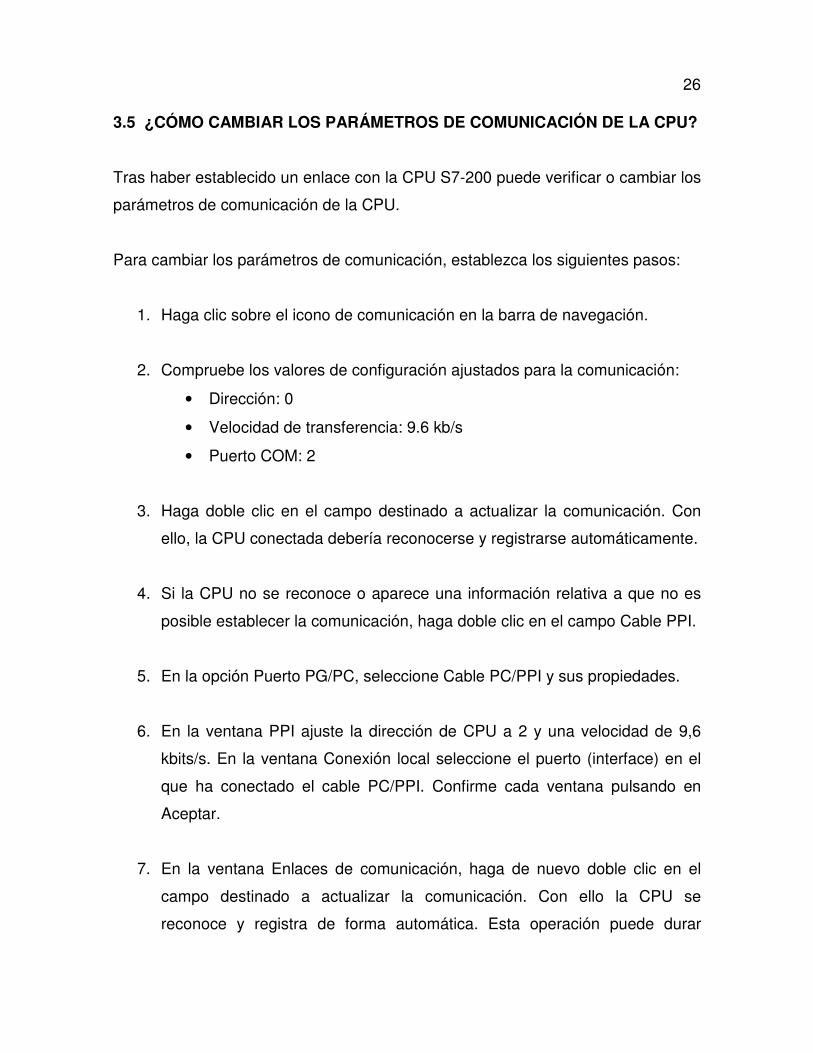
2. Ponga el S7-200 desde el PC en estado operativo STOP y vuelva a ponerlo
en RUN según la siguiente figura
Figura 10. Cambiar los modos de operación. Extraído de la Guía del usuario de Step 7 SIEMENS.
28
En el estado operativo RUN luce el LED verde RUN. En el estado operativo
STOP luce el LED amarillo STOP en el PLC. Si puede conmutar los
estados operativos desde el PC esto significa que la conexión entre el PC y
el PLC está bien instalada. Si no puede apreciar cambio de estado
operativo, compruebe las conexiones del cable, el ajuste de la velocidad de
transmisión en el cable PC/PPI así como, en el menú Ver >
Comunicación..., si ha seleccionado el interface correcto.
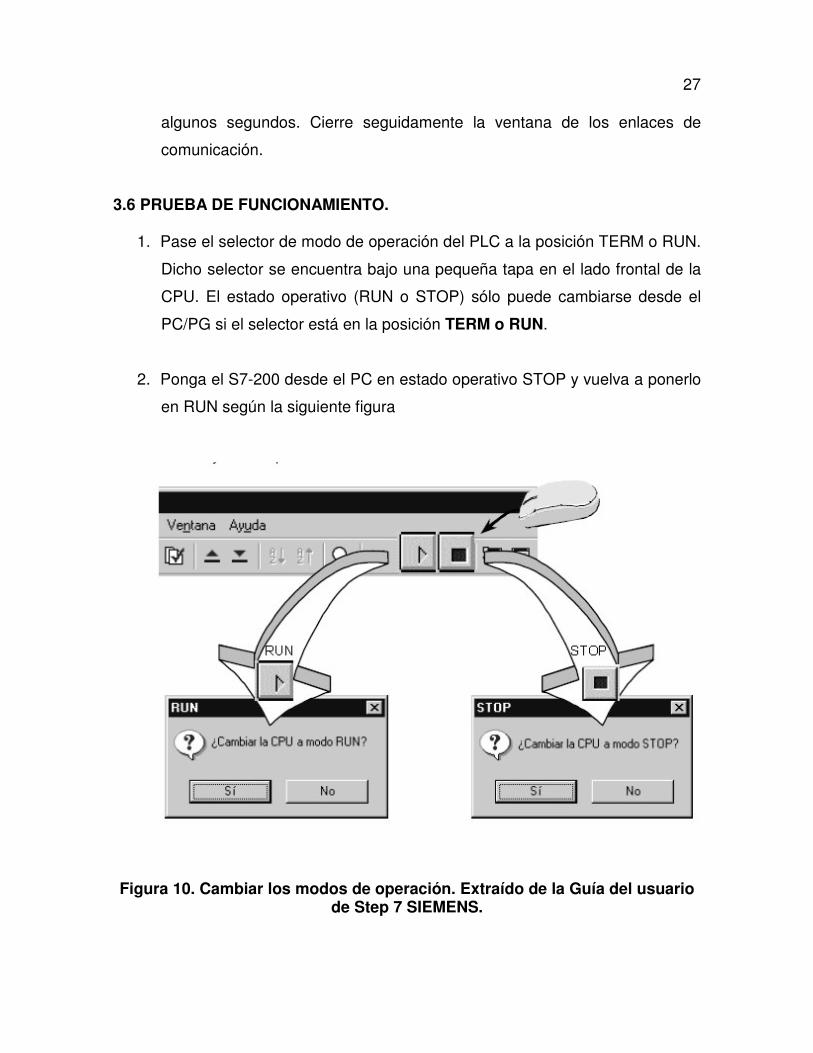
3.7 TRANSFERIR EL PROGRAMA AL PLC.
Figura 11. Transferencia de programa. Extraído
de la Guía del usuario de Step 7 SIEMENS.
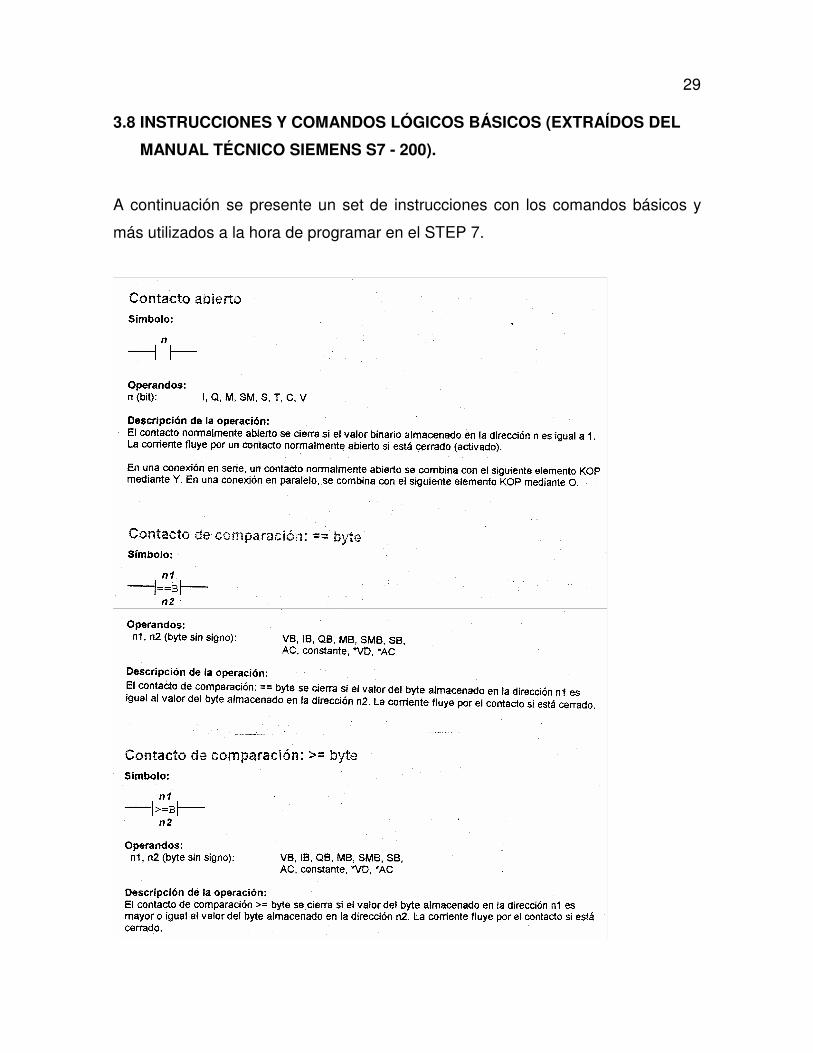
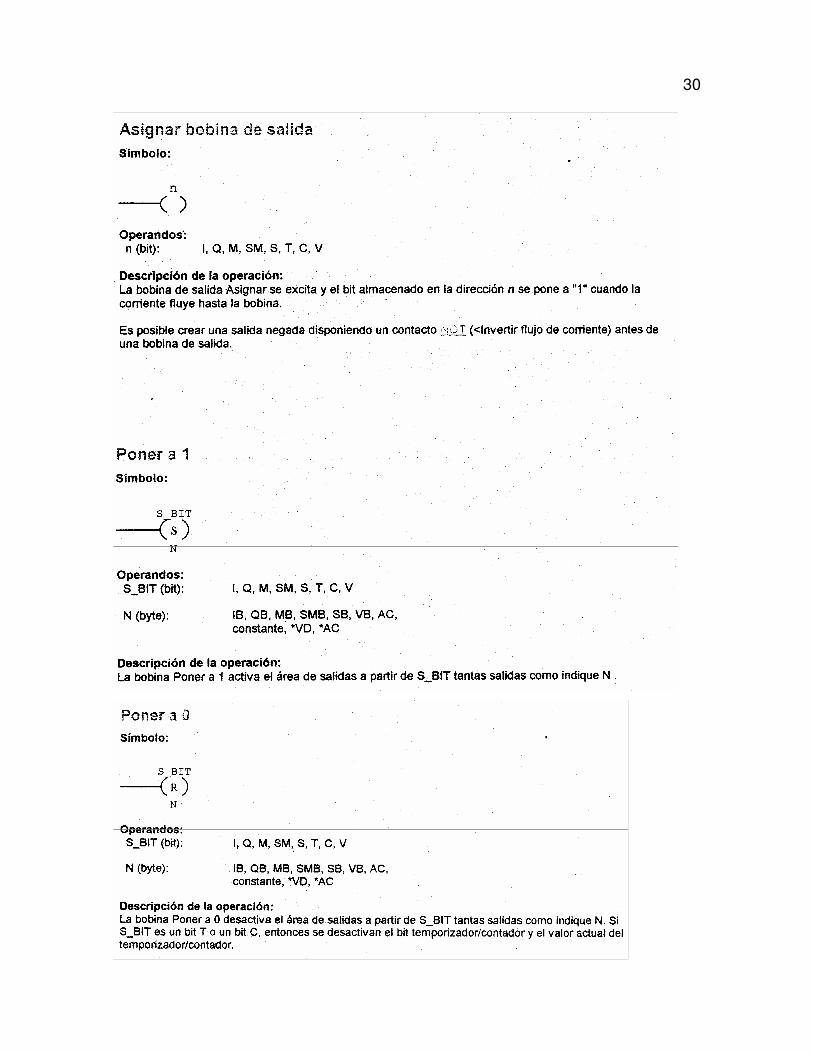
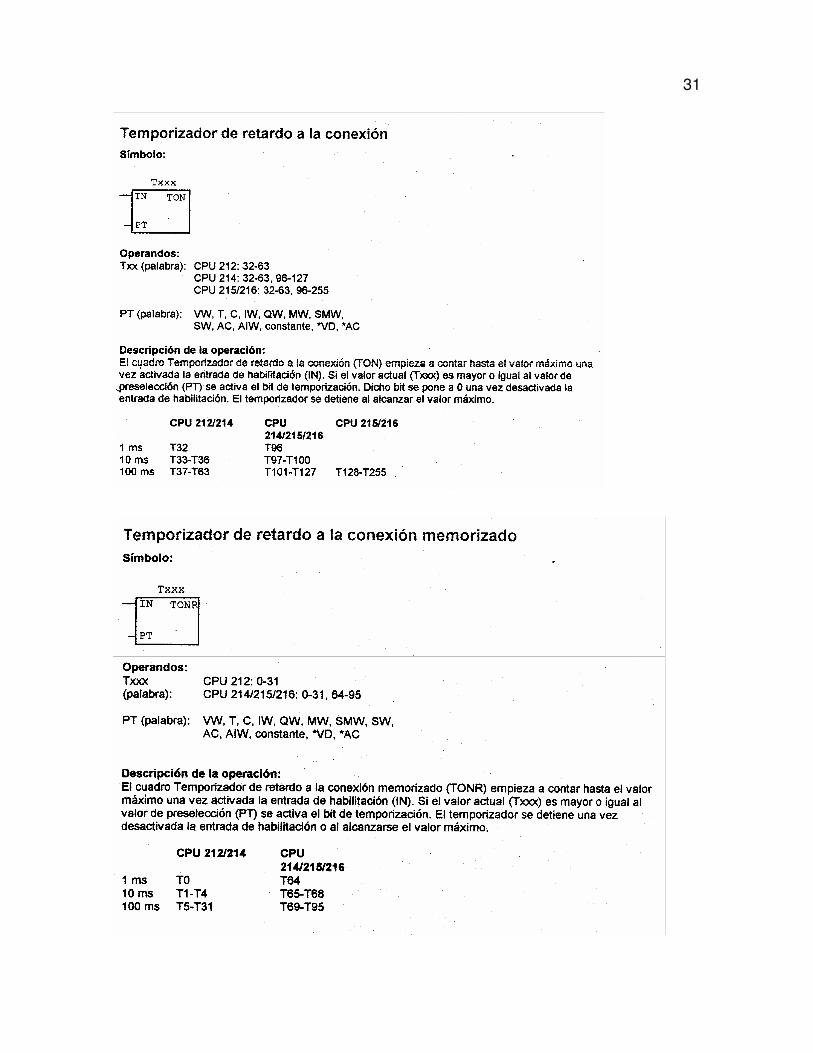
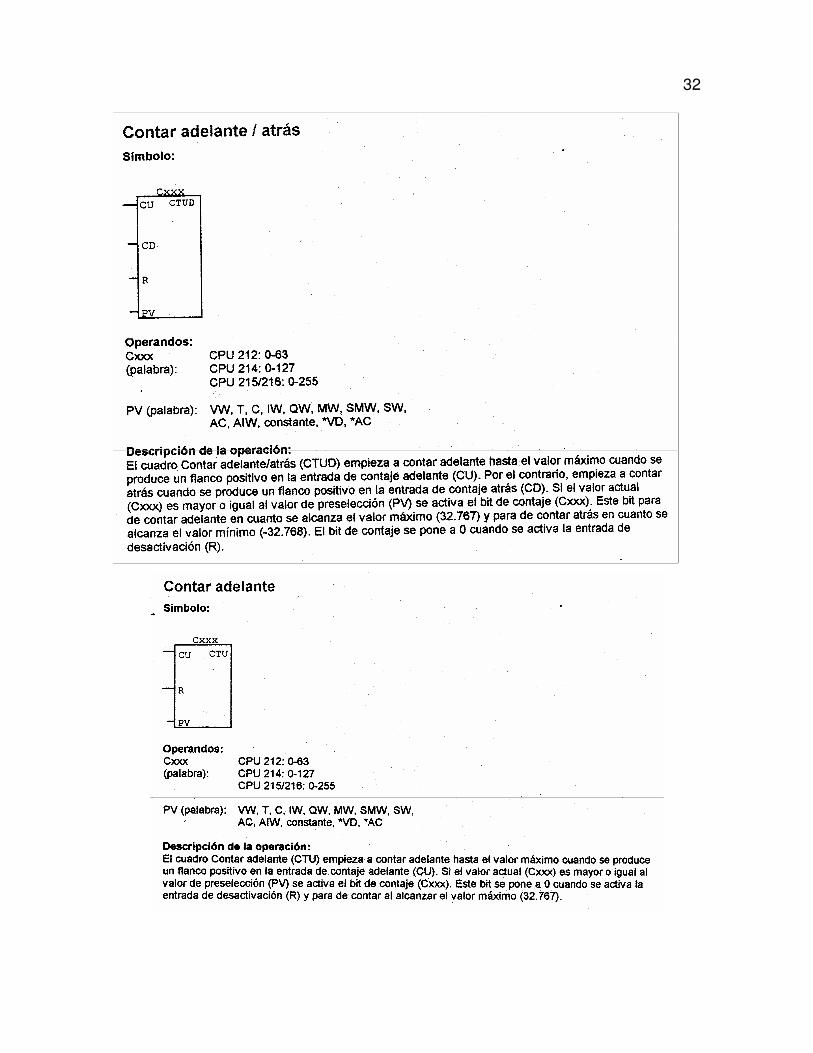
29 3.8 INSTRUCCIONES Y COMANDOS LÓGICOS BÁSICOS (EXTRAÍDOS DEL
MANUAL TÉCNICO SIEMENS S7 - 200).
A continuación se presente un set de instrucciones con los comandos básicos y
más utilizados a la hora de programar en el STEP 7.
30
31
32
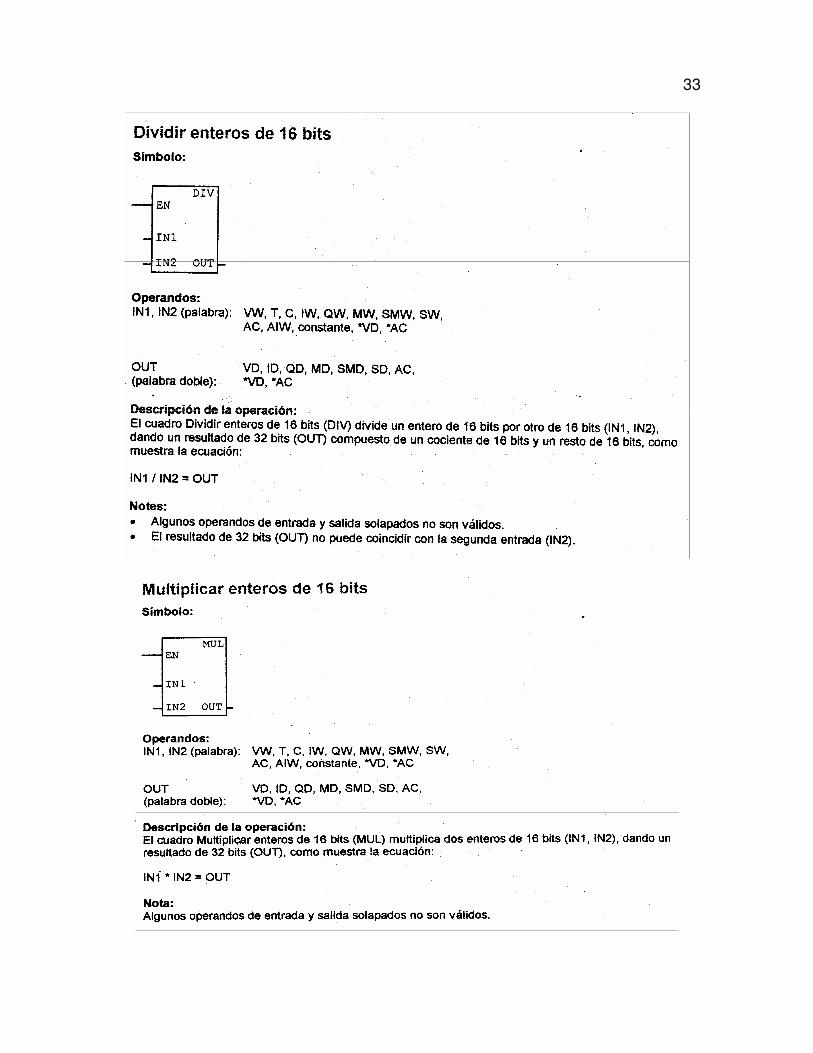
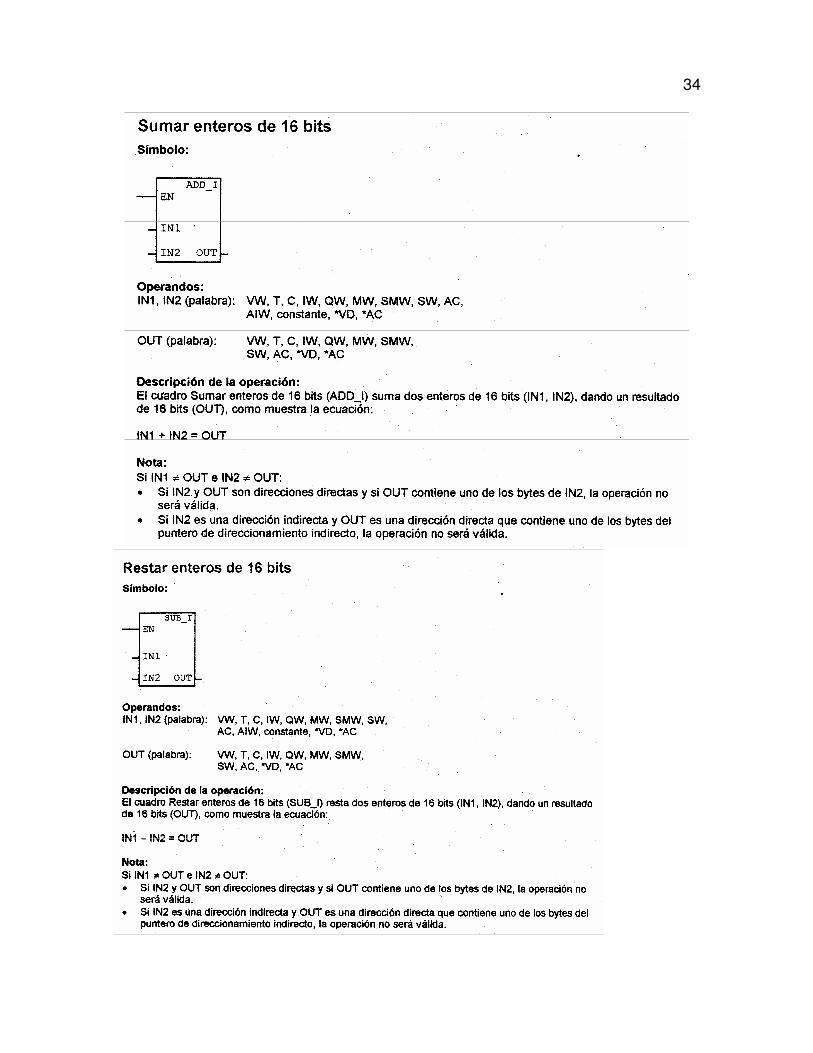
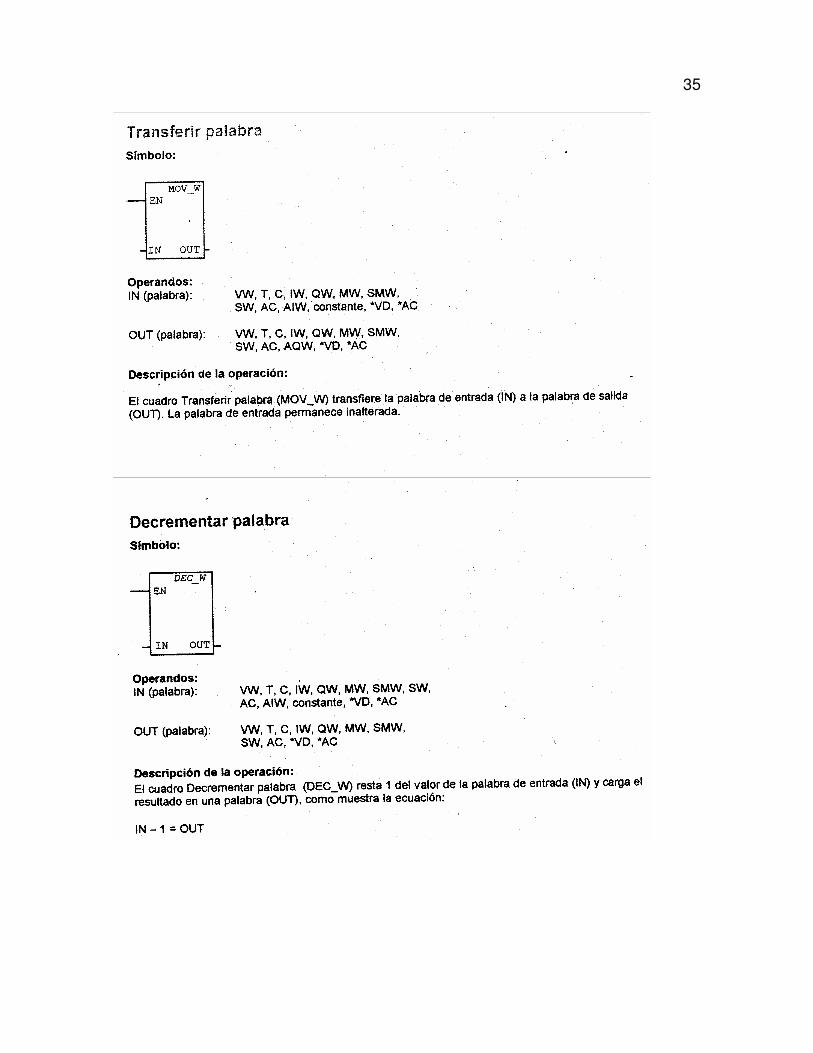
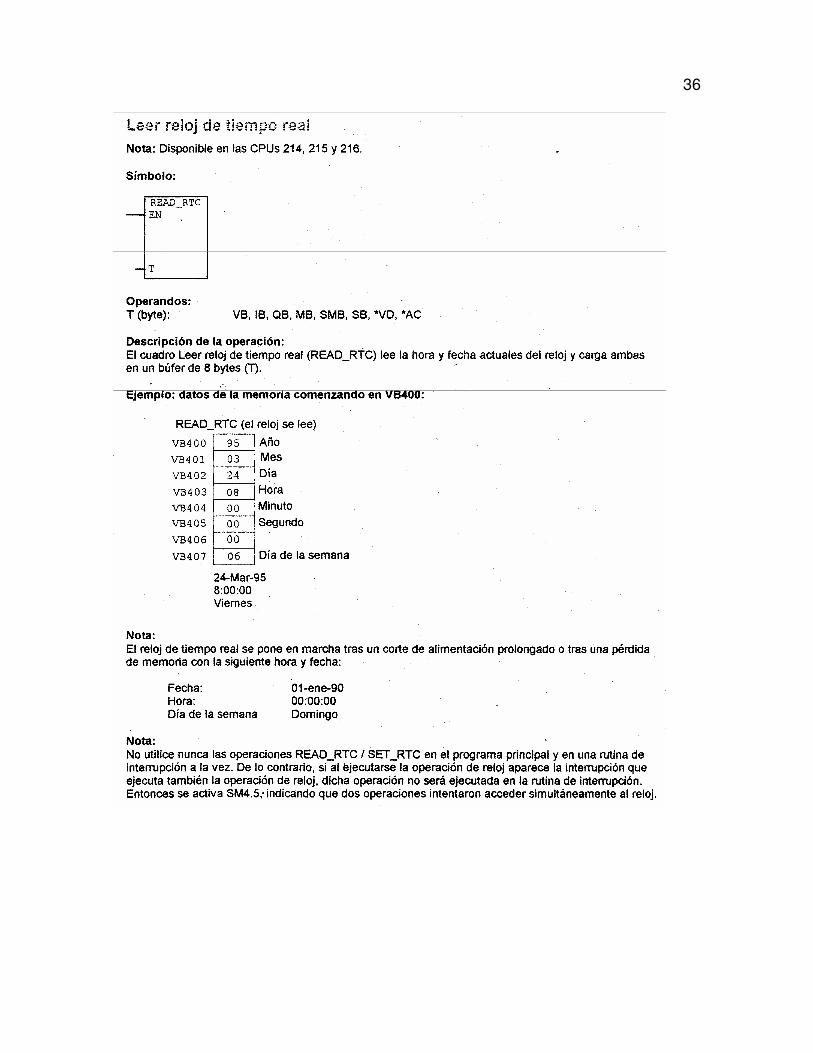
33
34
35
36
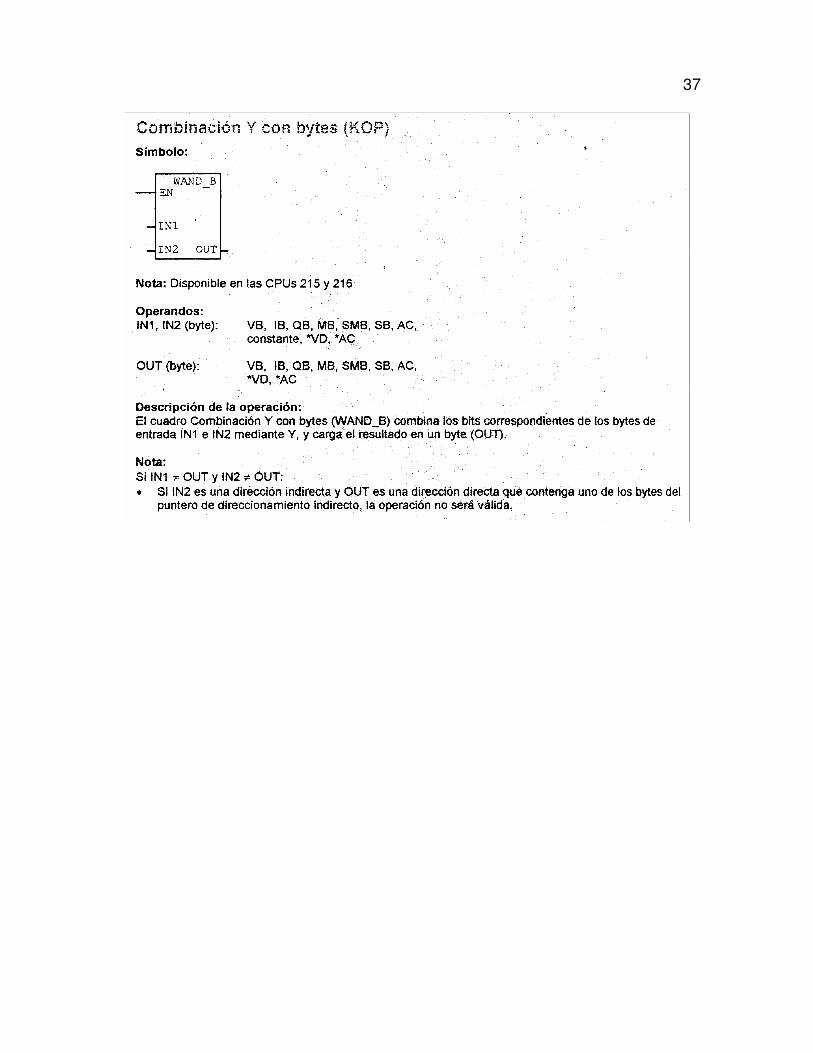
37
38
4. DISEÑO FÍSICO Y CONSTRUCCIÓN DE LOS TABLEROS
4.1 ESPECIFICACIONES CONSTRUCTIVAS
El diseño del prototipo estuvo enmarcado en tres aspectos principales:
- Facilidad en desplazamiento y ergonomía:
Principal en el diseño que el tablero sea cómodo y maniobrable; su poco peso
(aproximadamente 38 Kg.), diseño físico y estructura rodante (rodachina en
cada esquina) hacen que sea de fácil desplazamiento. Presenta una altura
ideal (aproximadamente 1.20 mt.), lo cual permite que este al nivel de
maniobra constituyendo de esta forma un equipo con alta ergonomía.
Observar dimensiones constructivas.
- Estética:
La disposición de los elementos, los elementos que lo componen, la estructura
física y el cableado realizado hacen que presente un buen nivel de estética.
Observar figura
- Robustez:
Son tableros diseñados para soportar el manejo normal de los estudiantes al
realizar las prácticas, todos sus materiales (baquela dieléctrica, soportes y
estructura) son resistentes; fundamentalmente hierro inmunizado (a excepción
de la baquela dieléctrica) pintado en su totalidad.
39 4.2 ESCOGENCIA DE CANTIDAD Y TIPO DE ELEMENTOS ELÉCTRICOS
Para realizar la selección de los elementos se partió de la base de tener como
recurso principal el PLC Siemens S7 200. A partir de este, se busco configurar los
elementos que potenciarán más su desempeño.
Teniendo en cuenta estos parámetros se adicionaron varios elementos que serán
especificados a continuación:
4.2.1 Contactores:
Elementos encargados de realizar la conexión y desconexión de los
motores, su función recae exclusivamente en traducir en efectos de
potencia la acción de control realizada por el PLC. Se seleccionaron dos
elementos de este tipo puesto que con ellos es suficiente para realizar las
prácticas propuestas.
4.2.2 Relé Térmico y Portarelé
El portarelé como soporte es imprescindible para permitir la conexión del
relé térmico. El relé térmico previene posibles daños, la protegiendo ión
motores eléctricos que sean conectados a los tableros cuando estos se ven
sometidos a sobrecargas ya sean tanto de tipo mecánicas (exceso de
carga, bloqueo de rotor o ciclos pesados de trabajo con muchas maniobras
de conexión en tiempos muy reducidos), como eléctricas (condiciones de
sobre o bajo voltaje, pérdidas de fase; etc.). Con un elemento (relé y
portarelé) es suficiente para la acción de protección.
40 4.2.3 Fusibles y Portafusibles cerámicos:
El porta fusible permite la conexión y desconexión sencilla del fusible, así
como el cableado de este mismo al tablero. Los fusibles por su parte son
exigidos como requerimiento para la protección de la alimentación del PLC
(fuente de PLC) en su hoja de datos. Ante condiciones de cortocircuito
previenen la destrucción de los conductores, dispositivos y elementos de
control del PLC. Al tratarse de un elemento de DC, se necesita proteger dos
líneas, por tanto se utilizaron dos elementos (fusible y porta fusible).
4.2.4 Breaker:
Incluido en el diseño e implementación debido a la necesidad de
desconexión total de las cargas y demás elementos del circuito de las
líneas de alimentación, con el fin de permitir operaciones ordinarias de
inspección, reparación y mantenimiento de forma segura. Se manejó un
único elemento pero de características tripular, con este se asegura la
protección de las líneas de potencia de cada tablero.
4.2.5 Pilotos Luminosos:
Indicadores luminosos que permite visualizar los estados y los diferentes
procesos que realicen los tableros. Se utilizaron tres pilotos en cada tablero
con lo que se asegura al estudiante una buena visualización y la posibilidad
de tener vigilado por medio de estos varios procesos simultáneamente.
4.2.6 Switchera y Pulsadores:
Elementos que permiten la interacción del usuario con el PLC. Se buscó
ofrecer diversos elementos de estas características. Para tal fin cada
41
tablero consta de un pulsador doble, dos sencillos y una switchera con 8
posiciones.
En los anexos A se puede observar las características precisas del PLC, así
mismo en el Anexo B es posible observar los elementos eléctricos que lo
acompañan.
4.3 MARCACIÓN Y CABLEADO
Basado en los estándares de calibres de AWG según la cual se especifica la
capacidad que tienen los diferentes conductores de conducir la corriente, se llegó
a la siguiente escogencia:
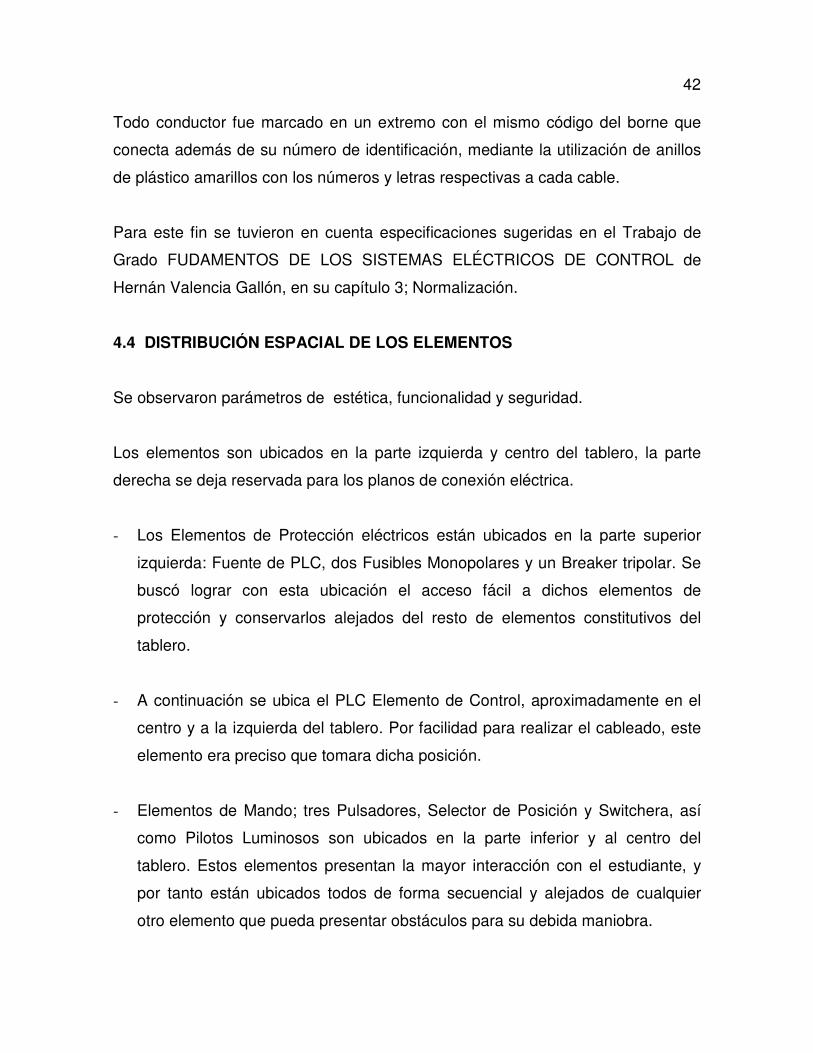
AWG 18 16 14 12 10 8 6 4 3 2
Amp 3 6 15 20 25 35 50 70 80 90
Tabla 1. Estandarización de valores AWG.
Para las conexiones del PLC se empleó cable calibre 16, puesto que se trata de
conexiones de control y por tanto manejan cantidades pequeñas de corriente
(siempre menores a 6 Amperios). Para las demás conexiones de Control se
empleó cable calibre 16 por motivos similares a los anteriores.
Para las conexiones de Potencia se empleó cable calibre 12, con el cual se
garantiza la conducción de hasta 20 amperios; más de los demandados por los
motores del laboratorio, viéndose así satisfechos los requerimientos de corriente.
Para la marcación específica del Entrenador para PLC se utilizó la nomenclatura
Americana NEMA (National Electrical Manufactures Association) con el fin de
garantizar la normalización del circuito.
42 Todo conductor fue marcado en un extremo con el mismo código del borne que
conecta además de su número de identificación, mediante la utilización de anillos
de plástico amarillos con los números y letras respectivas a cada cable.
Para este fin se tuvieron en cuenta especificaciones sugeridas en el Trabajo de
Grado FUDAMENTOS DE LOS SISTEMAS ELÉCTRICOS DE CONTROL de
Hernán Valencia Gallón, en su capítulo 3; Normalización.
4.4 DISTRIBUCIÓN ESPACIAL DE LOS ELEMENTOS
Se observaron parámetros de estética, funcionalidad y seguridad.
Los elementos son ubicados en la parte izquierda y centro del tablero, la parte
derecha se deja reservada para los planos de conexión eléctrica.
- Los Elementos de Protección eléctricos están ubicados en la parte superior
izquierda: Fuente de PLC, dos Fusibles Monopolares y un Breaker tripolar. Se
buscó lograr con esta ubicación el acceso fácil a dichos elementos de
protección y conservarlos alejados del resto de elementos constitutivos del
tablero.
- A continuación se ubica el PLC Elemento de Control, aproximadamente en el
centro y a la izquierda del tablero. Por facilidad para realizar el cableado, este
elemento era preciso que tomara dicha posición.
- Elementos de Mando; tres Pulsadores, Selector de Posición y Switchera, así
como Pilotos Luminosos son ubicados en la parte inferior y al centro del
tablero. Estos elementos presentan la mayor interacción con el estudiante, y
por tanto están ubicados todos de forma secuencial y alejados de cualquier
otro elemento que pueda presentar obstáculos para su debida maniobra.
43
Por último, los elementos de potencia; dos contactores, así como el relé
térmico son ubicados en la parte inferior izquierda. Conservando las
condiciones de seguridad, para estos elementos de potencia se estila ubicarlos
en las partes inferiores de los tableros. Observar Figuras 13 y 14.
4.5 DIMENSIONES Y VISTAS DE LOS TABLEROS
Para tener un acercamiento real a la dimensión física de los tableros es importante
presentar las vistas, así como las medidas a escala de los mismos.
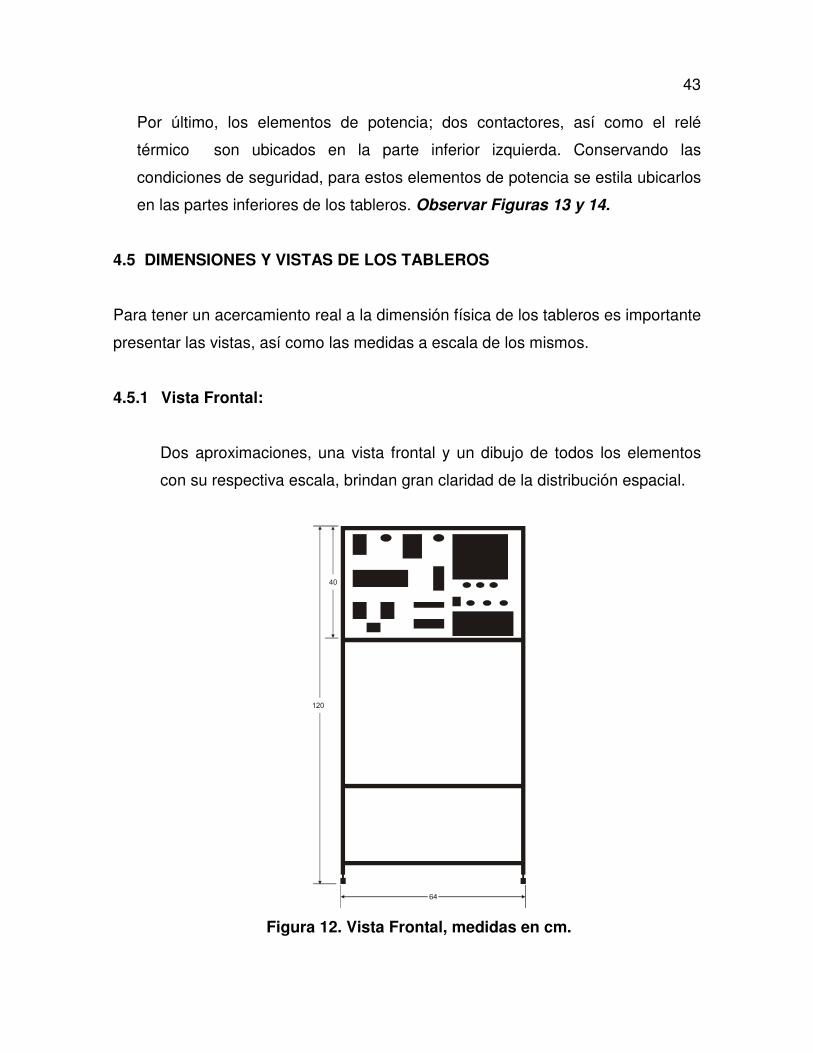
4.5.1 Vista Frontal:
Dos aproximaciones, una vista frontal y un dibujo de todos los elementos
con su respectiva escala, brindan gran claridad de la distribución espacial.
Figura 12. Vista Frontal, medidas en cm.
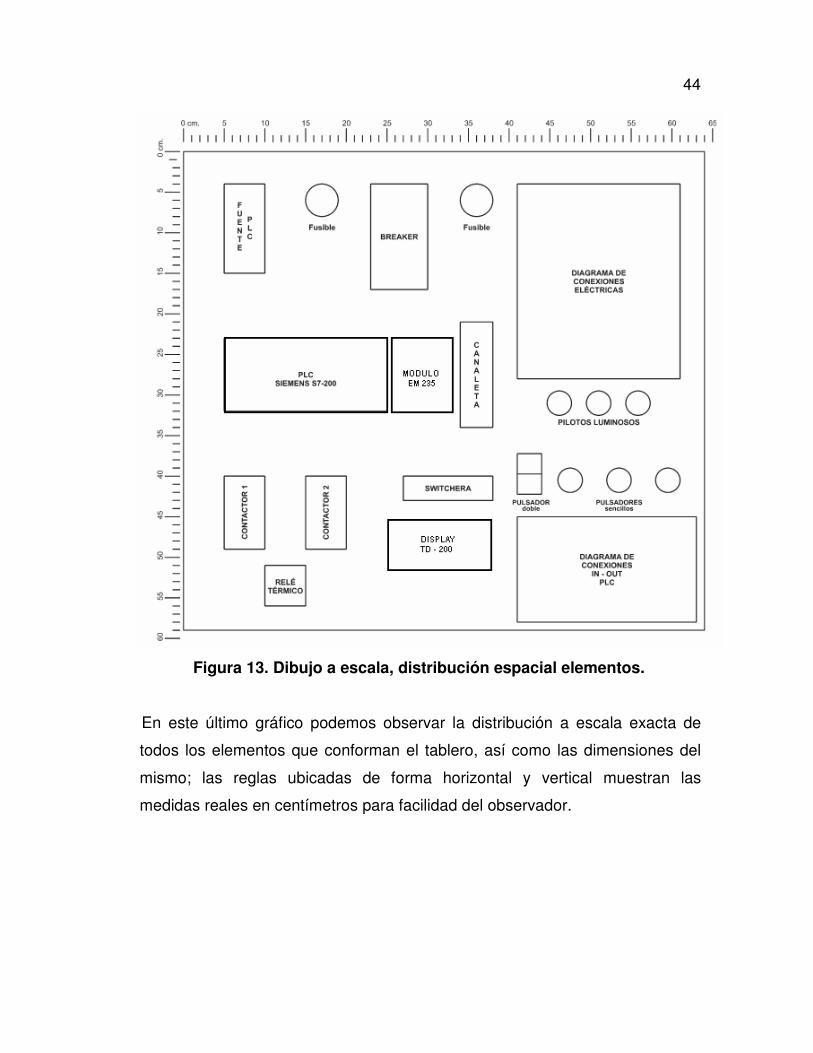
44
Figura 13. Dibujo a escala, distribución espacial elementos.
En este último gráfico podemos observar la distribución a escala exacta de
todos los elementos que conforman el tablero, así como las dimensiones del
mismo; las reglas ubicadas de forma horizontal y vertical muestran las
medidas reales en centímetros para facilidad del observador.
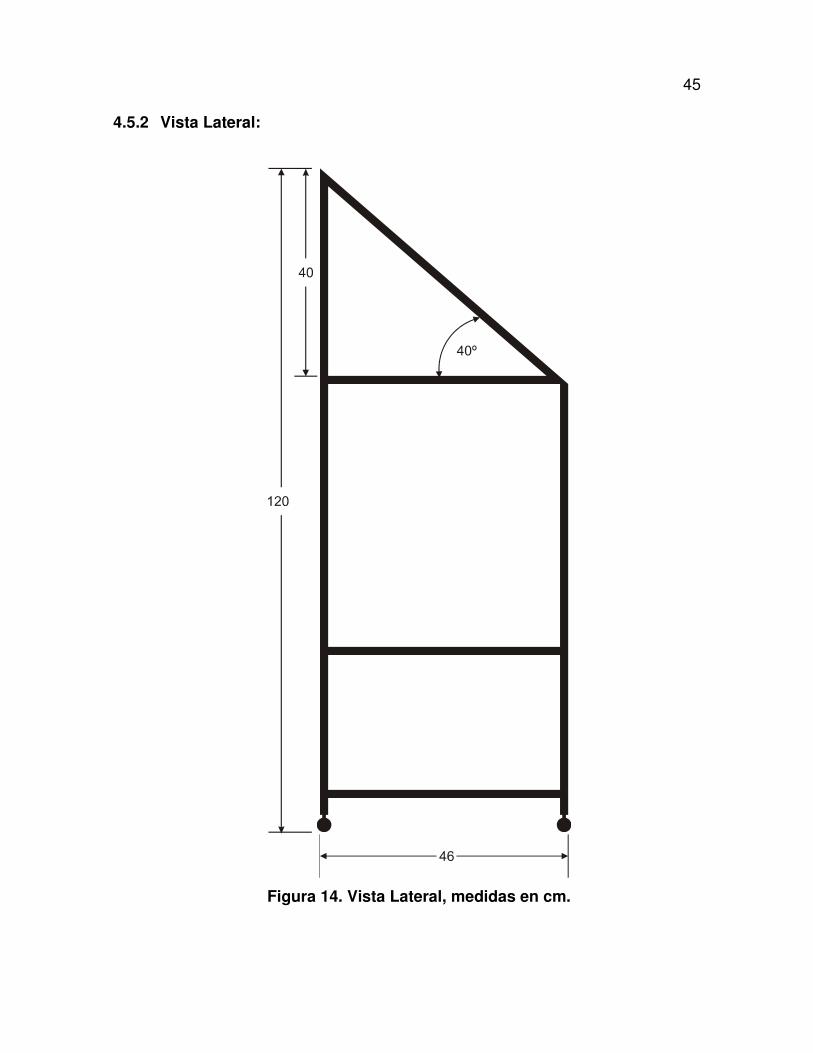
45 4.5.2 Vista Lateral:
Figura 14. Vista Lateral, medidas en cm.
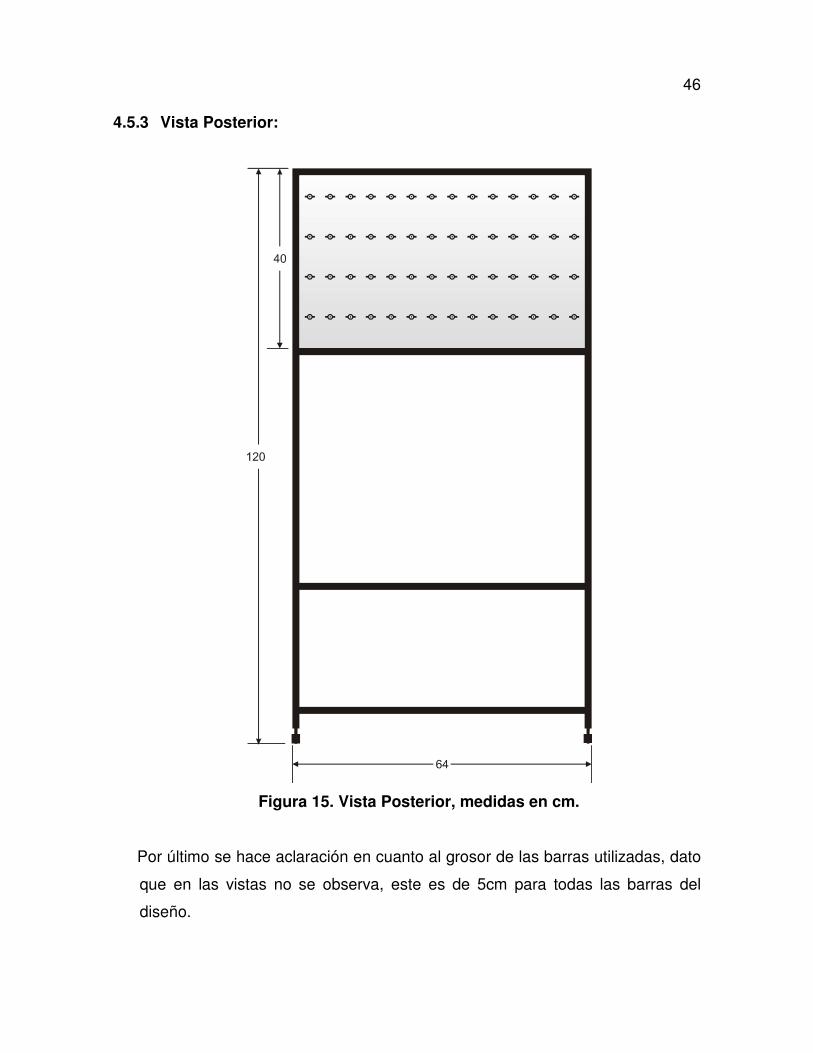
46 4.5.3 Vista Posterior:
Figura 15. Vista Posterior, medidas en cm.
Por último se hace aclaración en cuanto al grosor de las barras utilizadas, dato
que en las vistas no se observa, este es de 5cm para todas las barras del
diseño.

47 4.6 PRESENTACIÓN FINAL DE TABLEROS
Se presenta tres diferentes tipos de imágenes; Imagen Frontal, Lateral y Posterior,
se descarta la Imagen Superior puesto que no aporta ninguna información.
4.6.1 Imagen Frontal:
Se realizaron dos fotografías para este tipo de vista, un plano abierto, en el
cual se divisa la estructura general y un acercamiento, que permite observar
con gran criterio los elementos del tablero.
Figura 16. Plano Abierto Frontal.

48
Figura 17. Acercamiento Frontal.
4.6.2 Imagen Posterior:
Al igual que en el caso de la imagen frontal se tomaron dos fotografías, un
plano abierto de la estructura y un acercamiento.
Figura 18. Acercamiento Posterior.
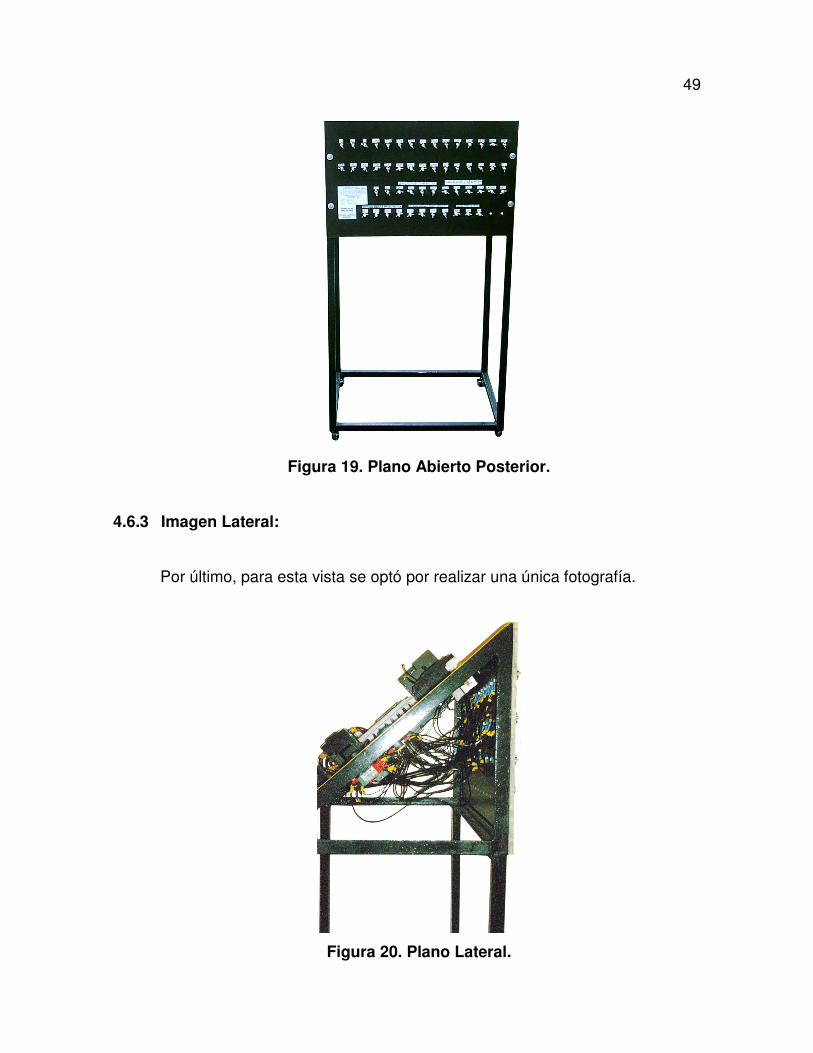
49
Figura 19. Plano Abierto Posterior.
4.6.3 Imagen Lateral:
Por último, para esta vista se optó por realizar una única fotografía.
Figura 20. Plano Lateral.
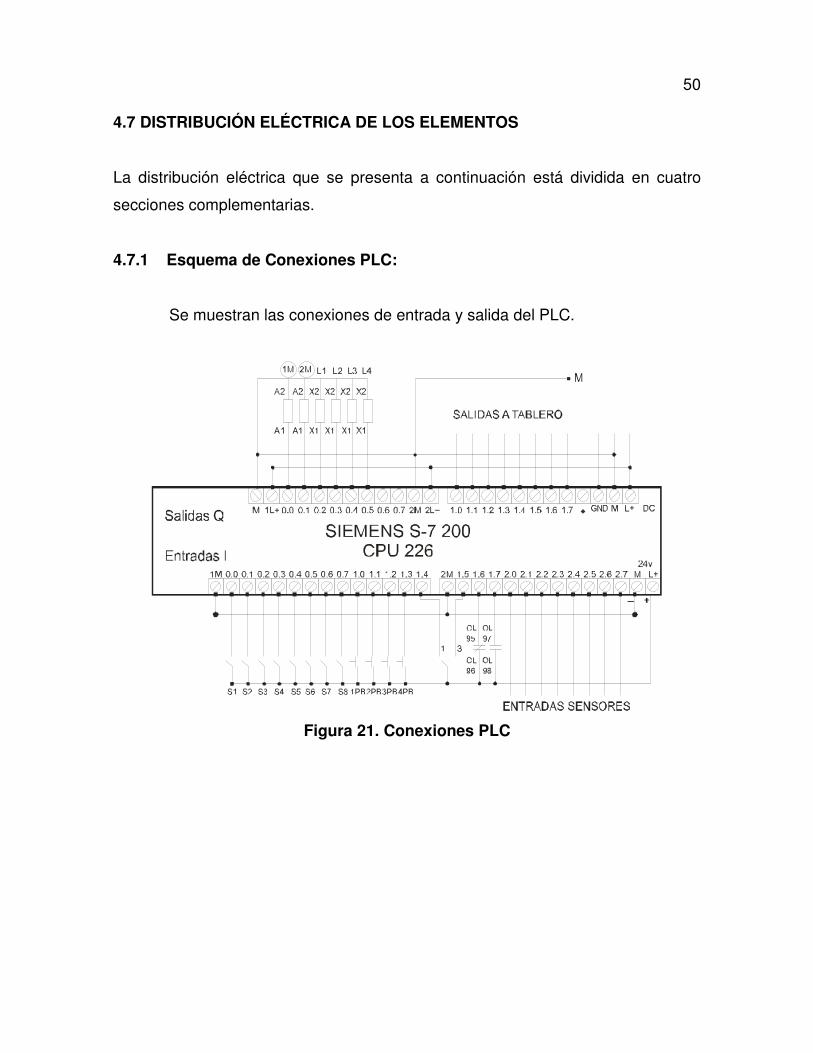
50 4.7 DISTRIBUCIÓN ELÉCTRICA DE LOS ELEMENTOS
La distribución eléctrica que se presenta a continuación está dividida en cuatro
secciones complementarias.
4.7.1 Esquema de Conexiones PLC:
Se muestran las conexiones de entrada y salida del PLC.
Figura 21. Conexiones PLC
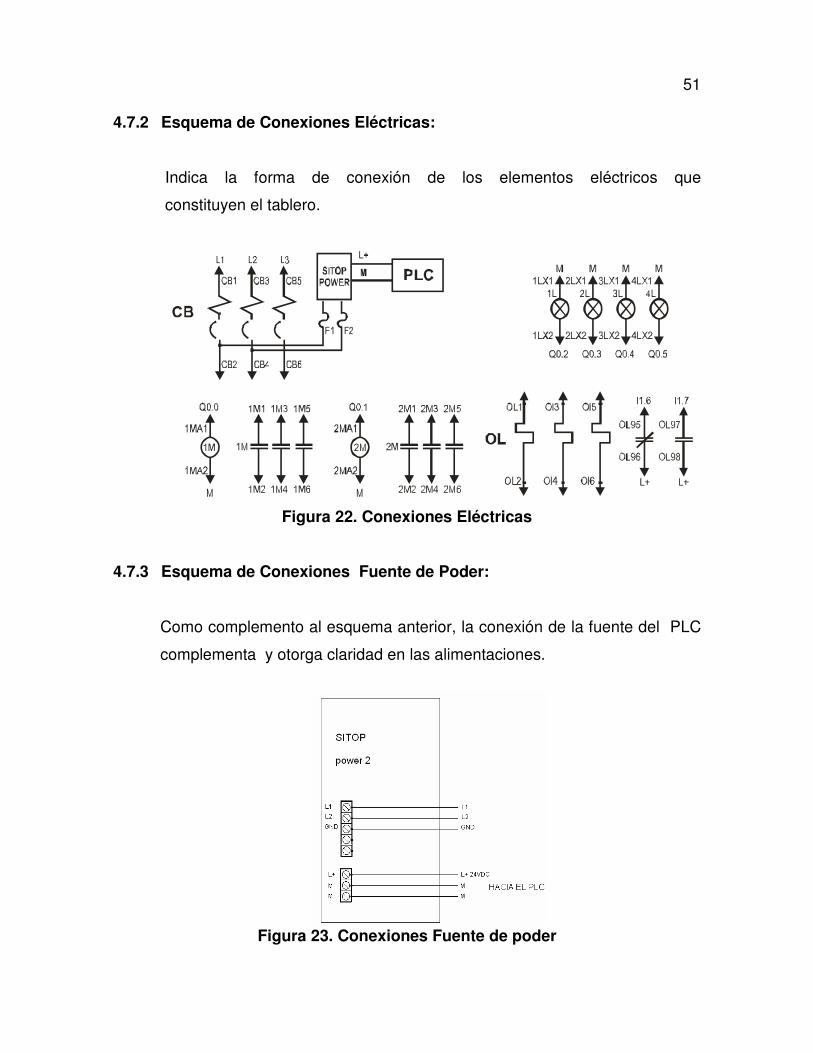
51 4.7.2 Esquema de Conexiones Eléctricas:
Indica la forma de conexión de los elementos eléctricos que
constituyen el tablero.
Figura 22. Conexiones Eléctricas
4.7.3 Esquema de Conexiones Fuente de Poder:
Como complemento al esquema anterior, la conexión de la fuente del PLC
complementa y otorga claridad en las alimentaciones.
Figura 23. Conexiones Fuente de poder
52
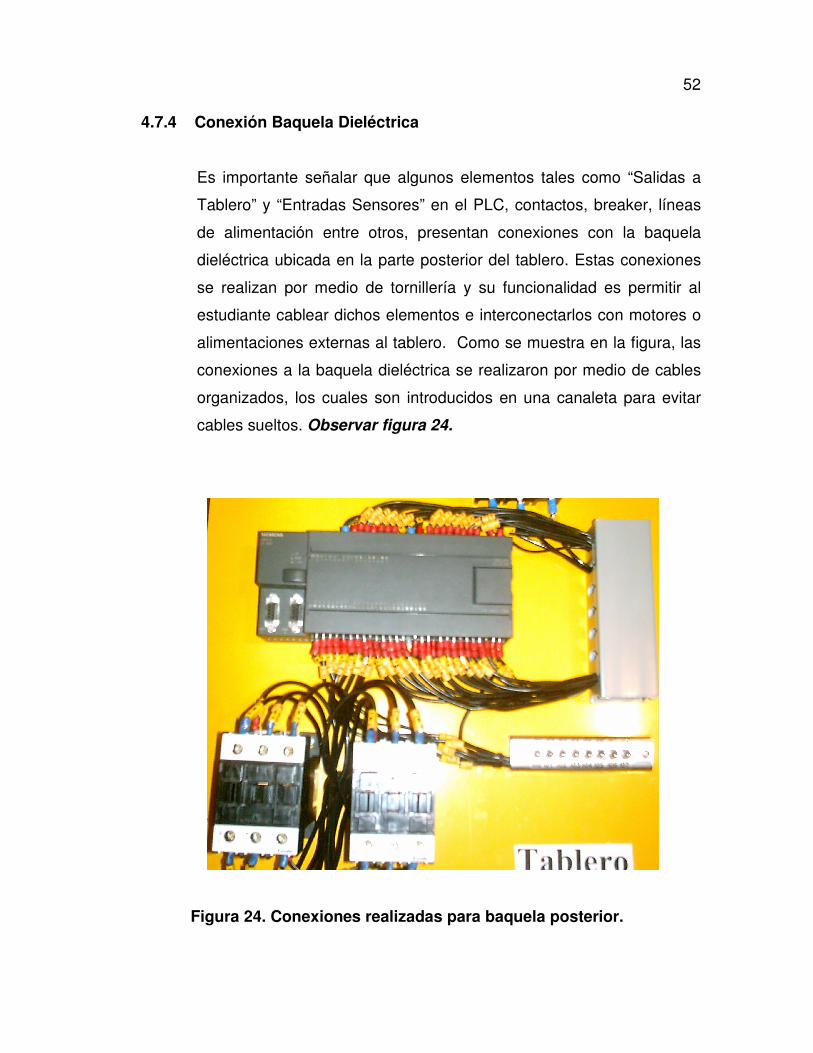
4.7.4 Conexión Baquela Dieléctrica
Es importante señalar que algunos elementos tales como “Salidas a
Tablero” y “Entradas Sensores” en el PLC, contactos, breaker, líneas
de alimentación entre otros, presentan conexiones con la baquela
dieléctrica ubicada en la parte posterior del tablero. Estas conexiones
se realizan por medio de tornillería y su funcionalidad es permitir al
estudiante cablear dichos elementos e interconectarlos con motores o
alimentaciones externas al tablero. Como se muestra en la figura, las
conexiones a la baquela dieléctrica se realizaron por medio de cables
organizados, los cuales son introducidos en una canaleta para evitar
cables sueltos. Observar figura 24.
Figura 24. Conexiones realizadas para baquela posterior.
53 4.8 LISTADO DE MATERIALES
Para la realización de este trabajo fue necesario utilizar componentes tanto de
carácter eléctrico como materiales constructivos, a continuación se presenta un
listado detallado de ambos.
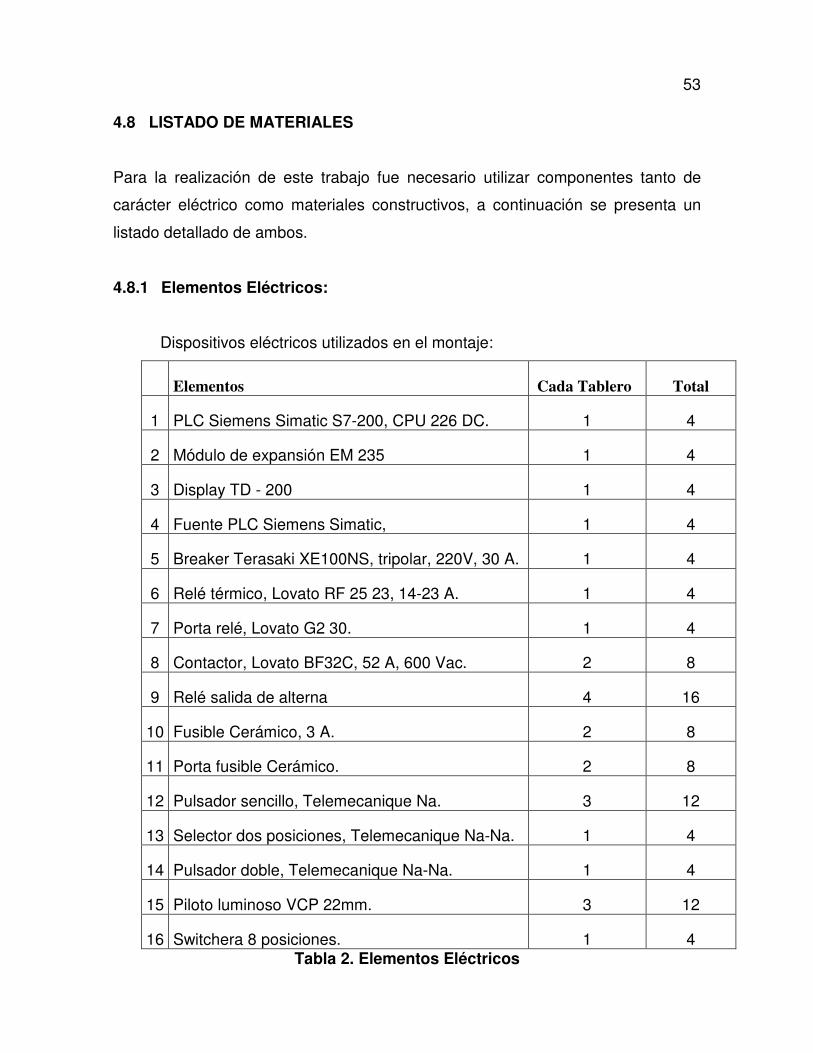
4.8.1 Elementos Eléctricos:
Dispositivos eléctricos utilizados en el montaje:
Elementos Cada Tablero Total
1 PLC Siemens Simatic S7-200, CPU 226 DC. 1 4
2 Módulo de expansión EM 235 1 4
3 Display TD - 200 1 4
4 Fuente PLC Siemens Simatic, 1 4
5 Breaker Terasaki XE100NS, tripolar, 220V, 30 A. 1 4
6 Relé térmico, Lovato RF 25 23, 14-23 A. 1 4
7 Porta relé, Lovato G2 30. 1 4
8 Contactor, Lovato BF32C, 52 A, 600 Vac. 2 8
9 Relé salida de alterna 4 16
10 Fusible Cerámico, 3 A. 2 8
11 Porta fusible Cerámico. 2 8
12 Pulsador sencillo, Telemecanique Na. 3 12
13 Selector dos posiciones, Telemecanique Na-Na. 1 4
14 Pulsador doble, Telemecanique Na-Na. 1 4
15 Piloto luminoso VCP 22mm. 3 12
16 Switchera 8 posiciones. 1 4 Tabla 2. Elementos Eléctricos
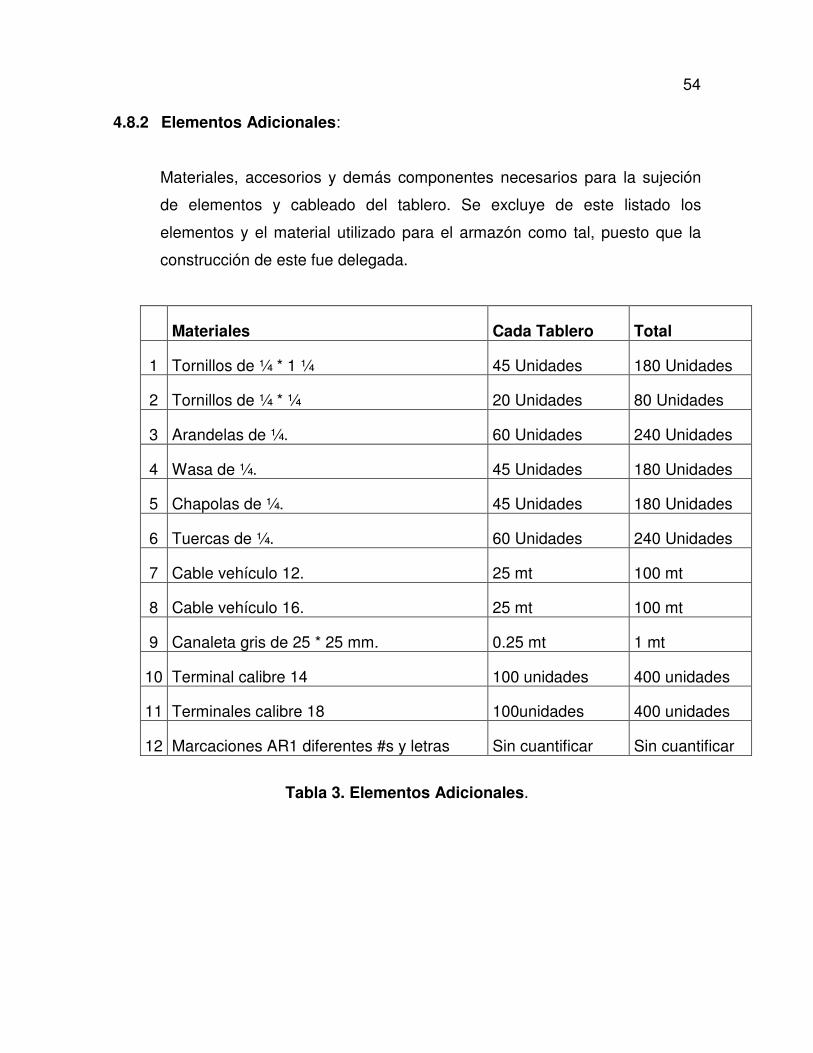
54 4.8.2 Elementos Adicionales:
Materiales, accesorios y demás componentes necesarios para la sujeción
de elementos y cableado del tablero. Se excluye de este listado los
elementos y el material utilizado para el armazón como tal, puesto que la
construcción de este fue delegada.
Materiales Cada Tablero Total
1 Tornillos de ¼ * 1 ¼ 45 Unidades 180 Unidades
2 Tornillos de ¼ * ¼ 20 Unidades 80 Unidades
3 Arandelas de ¼. 60 Unidades 240 Unidades
4 Wasa de ¼. 45 Unidades 180 Unidades
5 Chapolas de ¼. 45 Unidades 180 Unidades
6 Tuercas de ¼. 60 Unidades 240 Unidades
7 Cable vehículo 12. 25 mt 100 mt
8 Cable vehículo 16. 25 mt 100 mt
9 Canaleta gris de 25 * 25 mm. 0.25 mt 1 mt
10 Terminal calibre 14 100 unidades 400 unidades
11 Terminales calibre 18 100unidades 400 unidades
12 Marcaciones AR1 diferentes #s y letras Sin cuantificar Sin cuantificar
Tabla 3. Elementos Adicionales.
55 4.9 PRUEBAS Y SIMULACIONES
Las pruebas efectuadas a los cuatro tableros para PLC para chequear su normal
funcionamiento se resumen a continuación:
• Verificación visual y eléctrica (continuidad) de las conexiones entre los
diferentes dispositivos.
• Verificación teórica y práctica de los requerimientos de corriente y voltaje y los
valores nominales de los conductores y las terminales empleadas.
• Pruebas de esfuerzo físico a la lámina y los materiales empleados en la
construcción del panel.
• Pruebas de movilidad con el fin de garantizar su versatilidad en la
implementación de las prácticas del Laboratorio.
• Pruebas de protocolos y software entre el programador y el PLC mediante el
cable de interfase.
• Por medio de la Simulación de algunas de las prácticas diseñadas para el
laboratorio en cada uno de los tableros, se realizo la prueba final observando el
normal funcionamiento de bobinas y contactos de contactores, así como de
elementos de protección (fusibles, breaker y relé térmico), diferentes
pulsadores y pilotos luminosos.
56
5. GUÍA DE PRÁCTICAS PARA EL LABORATORIO DE PLC
Mediante las prácticas planteadas a continuación se pretende que el estudiante al
resolverlas, vaya adquiriendo conocimientos y habilidades que le permitan resolver
situaciones y problemas de diseño y montaje que puede encontrarse un ingeniero
en el ambiente industrial o laboral, comenzando con ejercicios sencillos y
aumentando gradualmente el nivel de dificultad.
Las prácticas planteadas en la guía tratan de emular situaciones cotidianas para
así observar el gran rango de aplicaciones que tiene esta tecnología en nuestra
vida.
La implementación de los ejercicios de aplicación propuestos en cada práctica
mediante los tableros para PLC construidos, ofrece una gran garantía de que al
final del curso se hayan adquirido buenas bases sobre el tema, y que servirán
mucho a la hora de hacer frente a los diversos problemas y situaciones que
conlleva el ámbito del control y la automatización industrial.
57
UNIVERSIDAD PONTIFICIA BOLIVARIANA
LABORATORIO DE PLC
GUÍA DE PRÁCTICAS
Contenido:
1- Introducción a los PLC y al STEP 7.
2- Encendido directo y apagado de un motor mediante autorretención.
3- Encendido y apagado de un motor mediante un telerruptor.
4- Control de dos motores por medio de pulsadores de marcha y paro.
5- Control de un garaje.
6- Control de un semáforo.
7- Control de un motor trifásico con desconexión temporizada.
8- Control simultáneo para dos motores.
9- Arranque ESTRELLA DELTA.
10- Control electromagnético de un motor de CA de jaula de ardilla.
11- Arranque ESTRELLA DELTA y frenado electromagnético.
12- Control para una escalera electromecánica.
13- Control para una banda transportadora.
14- Contador de objetos para banda transportadora.
15- Control FORWARD – REVERSE para un motor AC de jaula de ardilla.
16- Control electromagnético para un motor de rotor devanado con cambio
selectivo de velocidad.
Observar ANEXO G: Prácticas utilizando módulo de expansión.
Nota: Ver documento de datos y configuración del visualizador de textos (text
display) en el anexo F para utilizarlo en las prácticas. Se deja a criterio del
estudiante su configuración y utilización de los distintos parámetros que este
requiere para complementar las diferentes prácticas y hacerlas más completas.
58 PRÁCTICA 1
INTRODUCCIÓN A LOS PLC Y AL STEP 7
OBJETIVOS
- Conocer el mundo de aplicaciones y posibilidades que brinda el PLC.
- Conocer como funciona el hardware (el PLC SIEMENS S7-200 CPU 226), sus
especificaciones técnicas y configuraciones.
- Familiarizarse con el software (step 7), su configuración, sus instrucciones y
herramientas básicas para inicializarse en éste.
CONTENIDO
1. Para qué sirve el PLC.
2. Generalidades del PLC SIEMENS S7-200 CPU 226, Entradas/Salidas,
alimentación.
3. Como configurar el sistema.
4. Tipos de programación y lenguajes; ventajas y desventajas.
5. Como transferir programas al PLC.
6. Herramientas básicas; contactos, bobinas, funciones lógicas básicas.
59 DESARROLLO
Se deberá resolver el contenido de la práctica después de haber leído la guía
preliminar, la cuál está anexa al principio del libro. El profesor será el encargado
de guiar y verificar el proceso.
EJERCICIO DE INICIACIÓN:
Encendido de un motor aplicando las operaciones lógicas AND y OR.
Programa:
60 PRÁCTICA 2
ENCENDIDO DIRECTO Y APAGADO DE UN MOTOR MEDIANTE
AUTORRETENCIÓN
OBJETIVOS
- Aprender a configurar la autorretención de contactos para así poder aplicarla en
el laboratorio.
- Aprender a utilizar distintos tipos de señalizaciones mediante pilotos.
- Aprender a utilizar las “marcas” en step 7.
EJERCICIO DE APLICACIÓN:
Diseñar e implementar el programa y circuitos para realizar el arranque directo de
un motor de CA de jaula de ardilla, con señalización de funcionamiento del motor
(piloto verde) y falla por sobre carga (piloto rojo).
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
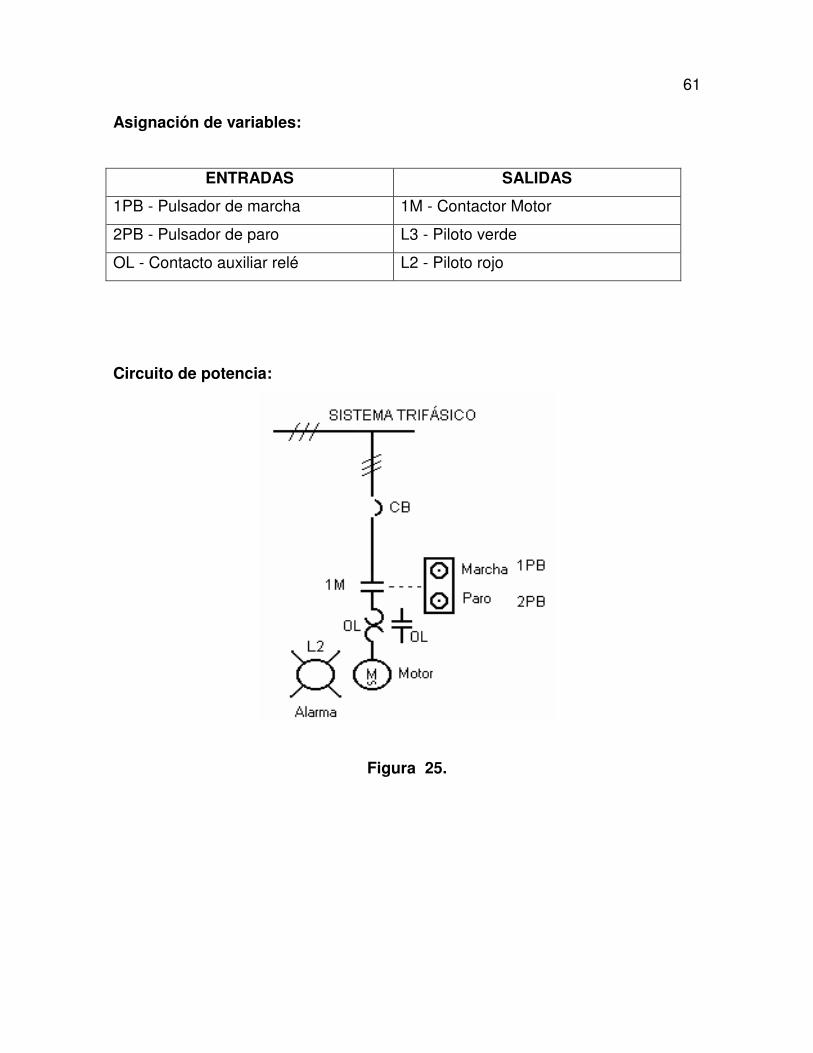
61 Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de marcha 1M - Contactor Motor
2PB - Pulsador de paro L3 - Piloto verde
OL - Contacto auxiliar relé L2 - Piloto rojo
Circuito de potencia:
Figura 25.
62 Programa:
63 PRÁCTICA 3
ENCENDIDO Y APAGADO DE UN MOTOR MEDIANTE UN TELERRUPTOR
OBJETIVOS
- Aprender a utilizar las “marcas” en step 7.
- Aprender a utilizar la activación de contactos mediante flancos (de subida y de
bajada).
- Aprender a controlar (encendido/apagado) cargas mediante un solo interruptor.
CONTENIDO
1. ¿Qué es un Telerruptor?
2. ¿Qué es una marca?
3. ¿Para qué se utiliza una marca?
DESARROLLO:
Se deberá resolver el contenido de la práctica después de haber leído la guía
preliminar, la cuál está anexa al principio del libro. El profesor será el encargado
de guiar y verificar el proceso.
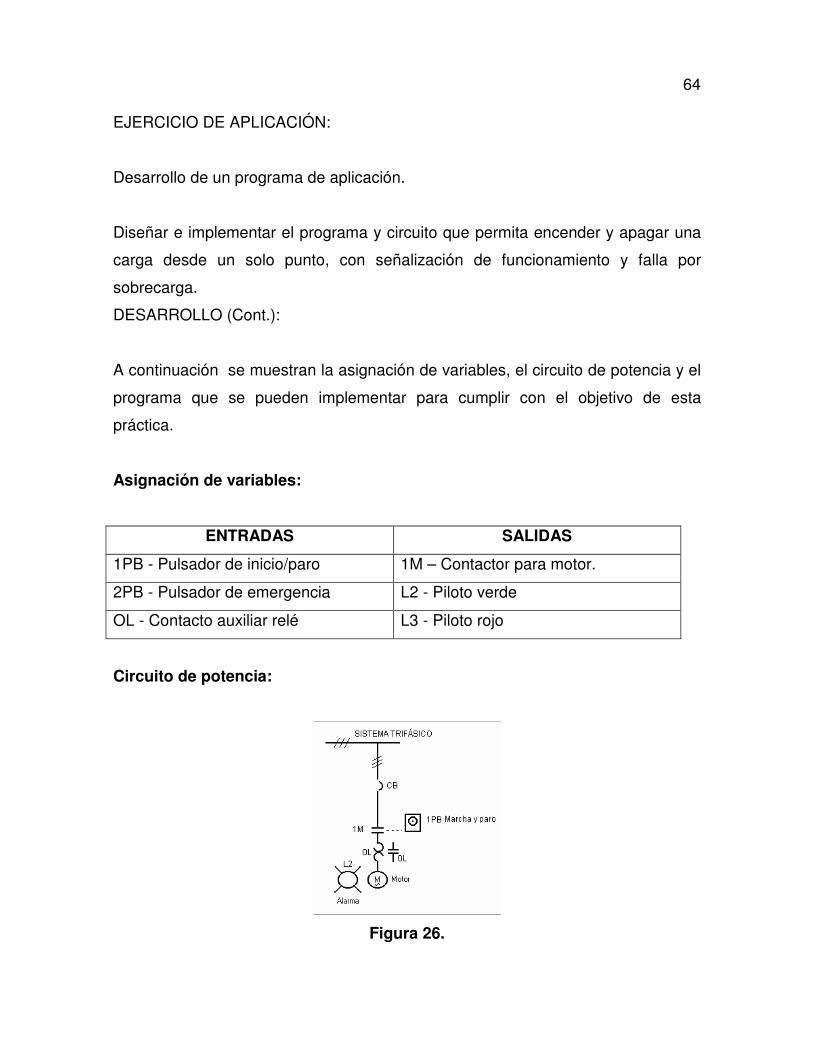
64 EJERCICIO DE APLICACIÓN:
Desarrollo de un programa de aplicación.
Diseñar e implementar el programa y circuito que permita encender y apagar una
carga desde un solo punto, con señalización de funcionamiento y falla por
sobrecarga.
DESARROLLO (Cont.):
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de inicio/paro 1M – Contactor para motor.
2PB - Pulsador de emergencia L2 - Piloto verde
OL - Contacto auxiliar relé L3 - Piloto rojo
Circuito de potencia:
Figura 26.
65 Programa:
66 PRÁCTICA 4
CONTROL DE DOS MOTORES POR MEDIO UN PULSADOR
OBJETIVO
- Observar los distintos usos y aplicaciones que ofrece el PLC.
- Aprender a configurar las herramientas que ofrece el PLC
EJERCICIO DE APLICACIÓN:
Se desea controlar dos motores por medio de dos pulsadores (marcha y paro),
1PB y 2PB.
Al presionar por primera vez el pulsador 1PB se conecta a la línea el motor 1, al
presionarlo por segunda vez se conecta a la línea el motor 2 con sus respectivos
señalizadores.
Al presionar 2PB se apaga el motor o los motores que estén en funcionamiento.
Se debe tener protección contra sobrecarga por medio de un relé y la actuación de
este debe generar una alarma luminosa.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
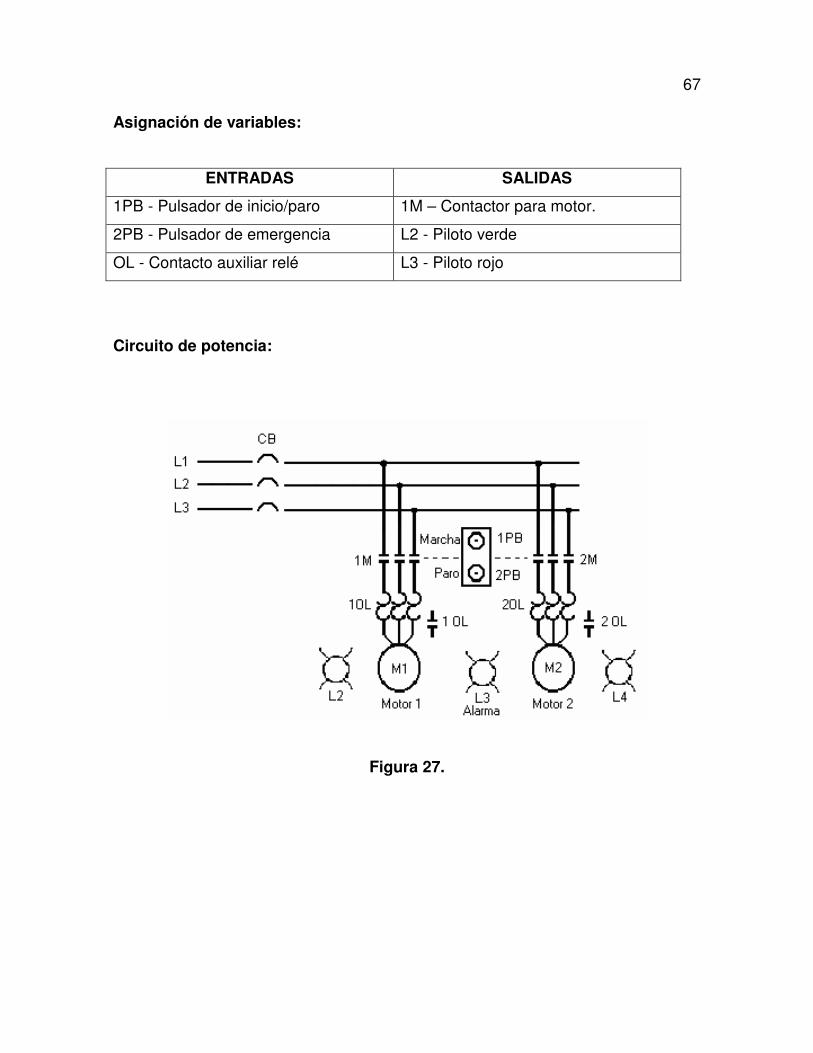
67 Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de inicio/paro 1M – Contactor para motor.
2PB - Pulsador de emergencia L2 - Piloto verde
OL - Contacto auxiliar relé L3 - Piloto rojo
Circuito de potencia:
Figura 27.
68 Programa:
69 PRÁCTICA 5
CONTROL DE UN GARAJE
OBJETIVO
Utilizar distintas herramientas que ofrece el PLC y observar como funcionan en un
ejemplo de la vida cotidiana.
EJERCICIO DE APLICACIÓN:
Automatizar un garaje de cinco plazas de tal forma que si éste se encuentra lleno,
se encienda una luz indicándolo y no suba la barrera de entrada (sólo la de
salida). En caso contrario deberá estar encendida otra luz indicando “LIBRE”
estando habilitadas las dos barreras.
El garaje consta de 5 plazas. Además se debe tener una señalización que indique
que el sistema está listo para arrancar.
Disponemos de un sensor fotoeléctrico y una barrera en la entrada y lo mismo en
la salida.
DESARROLLO:
A continuación se muestran la asignación de variables, el diagrama y el programa
que se pueden implementar para cumplir con el objetivo de esta práctica.
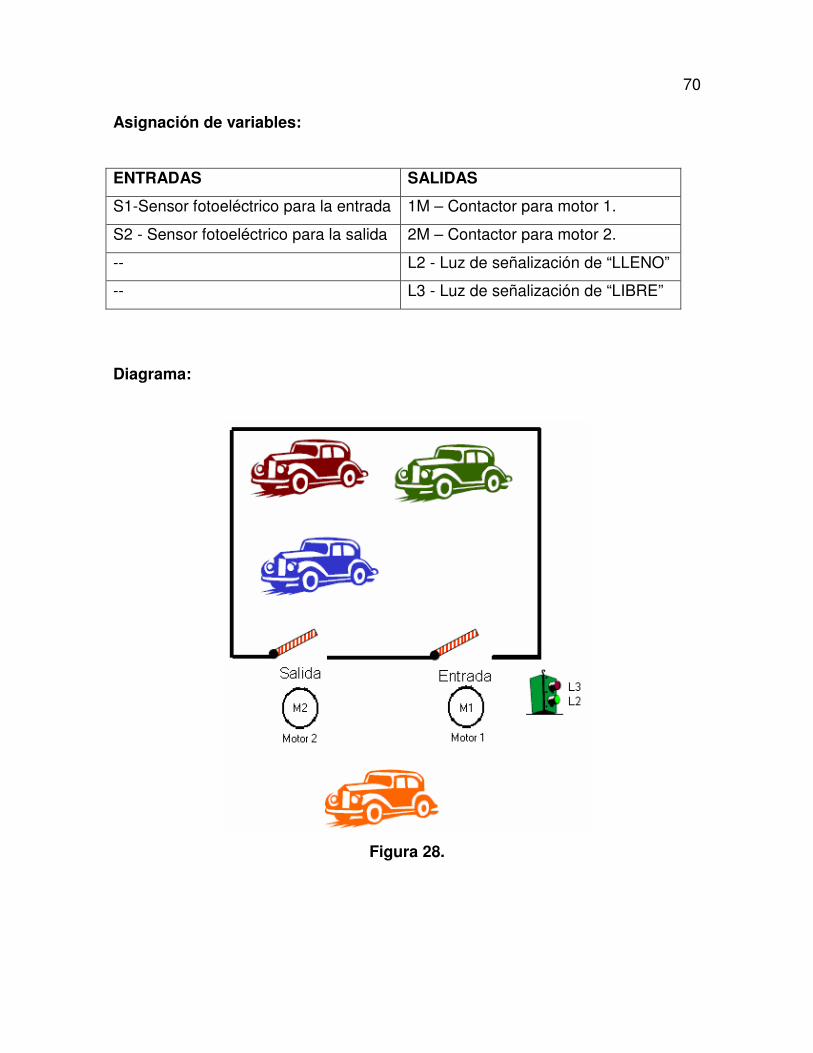
70 Asignación de variables:
ENTRADAS SALIDAS
S1-Sensor fotoeléctrico para la entrada 1M – Contactor para motor 1.
S2 - Sensor fotoeléctrico para la salida 2M – Contactor para motor 2.
-- L2 - Luz de señalización de “LLENO”
-- L3 - Luz de señalización de “LIBRE”
Diagrama:
Figura 28.
71 Programa:
72 PRÁCTICA 6
CONTROL DE UN SEMÁFORO
OBJETIVO
- Utilizar distintas herramientas que ofrece el PLC y observar como funcionan en
un ejemplo de la vida cotidiana.
EJERCICIO DE APLICACIÓN:
Se dispone de un semáforo, el cual en condiciones normales se encuentra del
siguiente modo:
• Rojo para peatones
• Amarillo en estado de transición
• Verde para vehículos
En el mismo instante que un peatón presione el pulsador situado en el semáforo,
éste pasará a amarillo, estado de transición que durará 5 segundos. Finalizado
éste, pasará a estado rojo para la detención de los vehículos y la circulación de
peatones.
El tiempo de duración fijado para el color rojo será de 15 segundos. Finalizado el
proceso, el semáforo regresará al estado normal (verde). Durante el tiempo de
duración del ciclo, deberá evitarse que cualquier nueva activación sobre el
pulsador, rearme el ciclo.
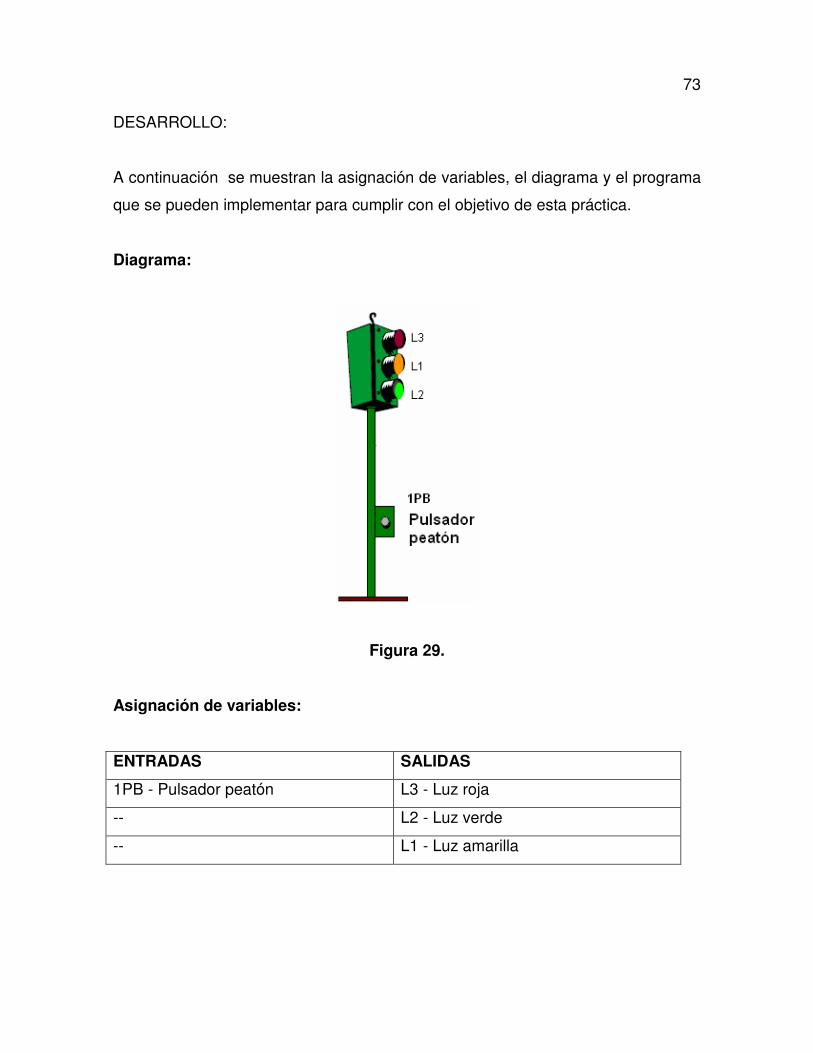
73 DESARROLLO:
A continuación se muestran la asignación de variables, el diagrama y el programa
que se pueden implementar para cumplir con el objetivo de esta práctica.
Diagrama:
Figura 29.
Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador peatón L3 - Luz roja
-- L2 - Luz verde
-- L1 - Luz amarilla
74 Programa:
75 PRÁCTICA 7
CONTROL DE UN MOTOR TRIFÁSICO CON DESCONEXIÓN TEMPORIZADA
OBJETIVOS
- Aprender a utilizar los distintos tipos de retardos que ofrece el PLC.
- Aprender a utilizar la activación de contactos mediante flancos (de subida y de
bajada).
CONTENIDO
1. Tipos de retardos que ofrece step 7.
2. Cantidad y duración de cada tipo de retardo.
3. Como se configura un retardo.
4. Ejercicio de aplicación propuesto.
DESARROLLO
- Se deberá resolver el contenido de la práctica después de haber leído la guía
preliminar, la cuál está anexa al principio del libro. El profesor será el encargado
de guiar y verificar el proceso.
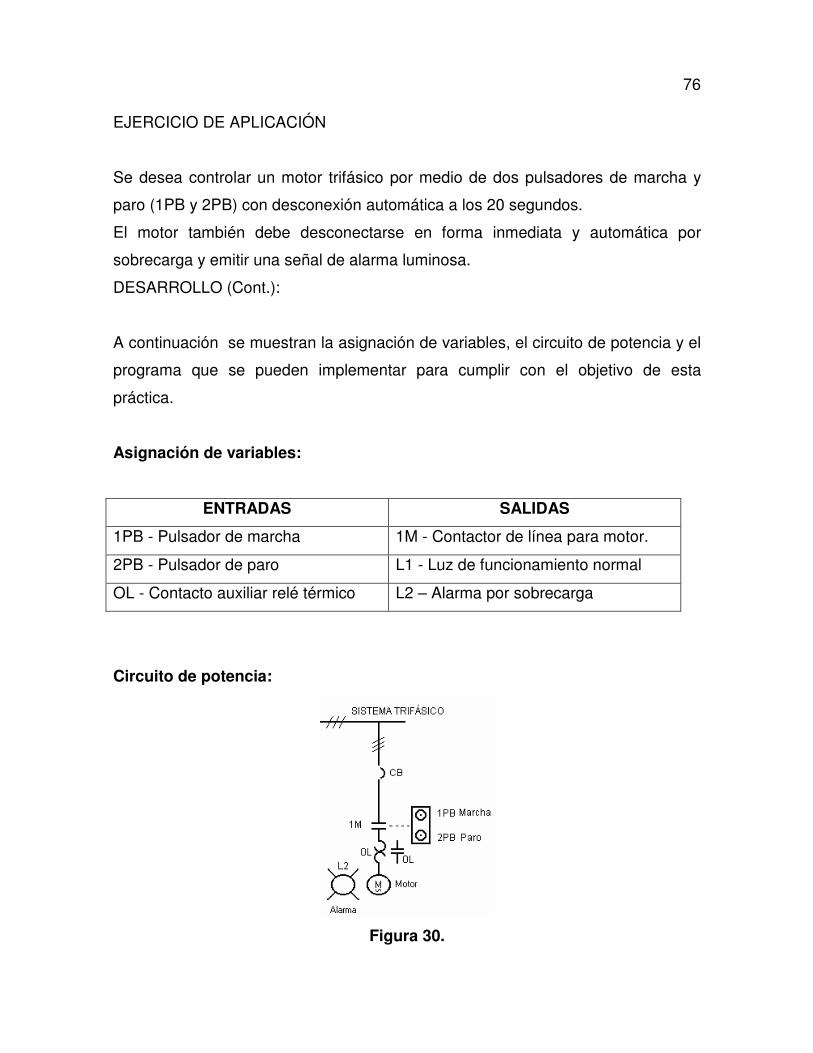
76 EJERCICIO DE APLICACIÓN
Se desea controlar un motor trifásico por medio de dos pulsadores de marcha y
paro (1PB y 2PB) con desconexión automática a los 20 segundos.
El motor también debe desconectarse en forma inmediata y automática por
sobrecarga y emitir una señal de alarma luminosa.
DESARROLLO (Cont.):
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de marcha 1M - Contactor de línea para motor.
2PB - Pulsador de paro L1 - Luz de funcionamiento normal
OL - Contacto auxiliar relé térmico L2 – Alarma por sobrecarga
Circuito de potencia:
Figura 30.
77 Programa:
78 PRÁCTICA 8
CONTROL SIMULTÁNEO PARA DOS MOTORES
OBJETIVO
Controlar el funcionamiento de dos motores mediante las herramientas ofrecidas
por el PLC.
EJERCICIO DE APLICACIÓN
Se desea controlar dos motores así:
Al presionar el pulsador 1PB se conecta a la red el motor 1. Al presionar el
pulsador 2PB se conecta el motor 2 y 30 seg. después se desconecta
automáticamente el motor 1.
Cada motor debe tener su respectivo señalizador de funcionamiento normal.
La actuación de un relé térmico debe desconectar el sistema y generar una alarma
luminosa.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
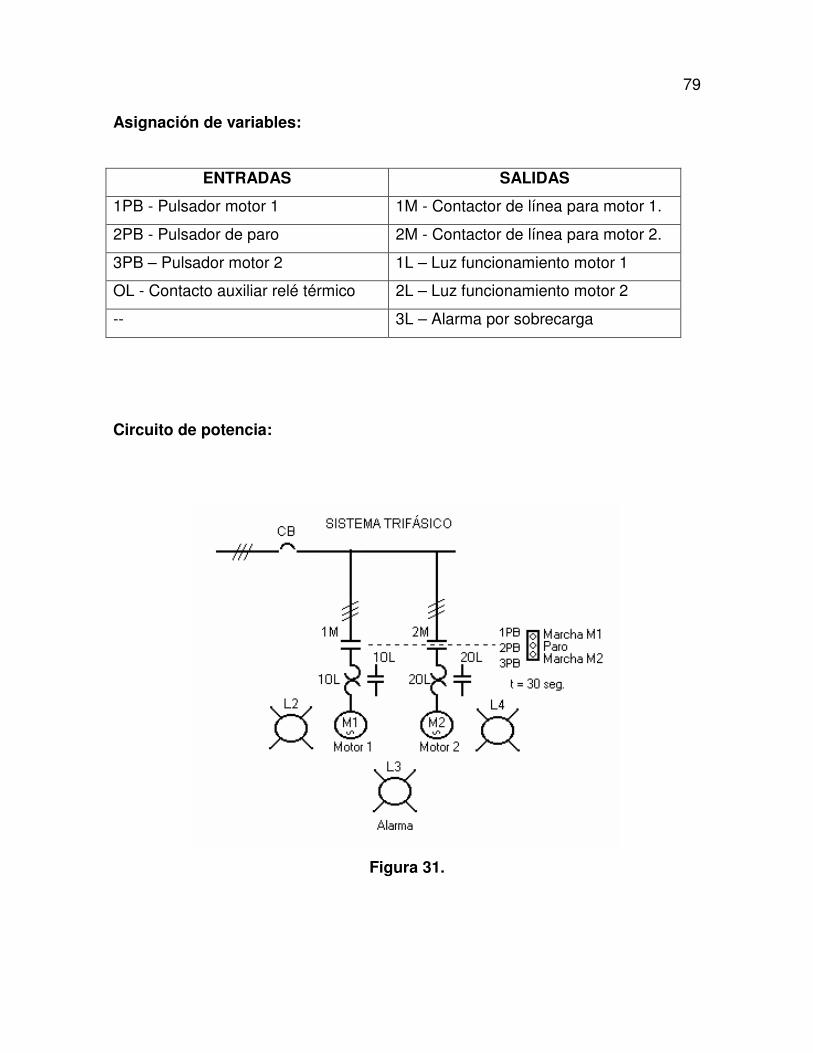
79 Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador motor 1 1M - Contactor de línea para motor 1.
2PB - Pulsador de paro 2M - Contactor de línea para motor 2.
3PB – Pulsador motor 2 1L – Luz funcionamiento motor 1
OL - Contacto auxiliar relé térmico 2L – Luz funcionamiento motor 2
-- 3L – Alarma por sobrecarga
Circuito de potencia:
Figura 31.
80 Programa:
81 PRÁCTICA 9
ARRANQUE ESTRELLA DELTA
OBJETIVO
Diseñar e implementar el programa y circuitos necesarios para efectuar un
correcto arranque estrella – delta.
EJERCICIO DE APLICACIÓN:
Considérese el circuito para el arranque estrella – delta. Al presionar el pulsador
1PB los devanados del motor se conectan en Y (estrella) permitiendo el arranque
a tensión reducida.
Después de 15 seg. los devanados del motor se reconectan en ∆ permitiendo la
operación a plena tensión (voltaje de línea).
La actuación del relé térmico debe desconectar el motor y generar una alarma
luminosa intermitente
El contactor que efectúa la conexión en estrella debe estar enclavado mecánica
y/o eléctricamente con el contactor que hace la reconexión en ∆ .
Con el pulsador 2PB se detiene el motor cuando se desee.
82 DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
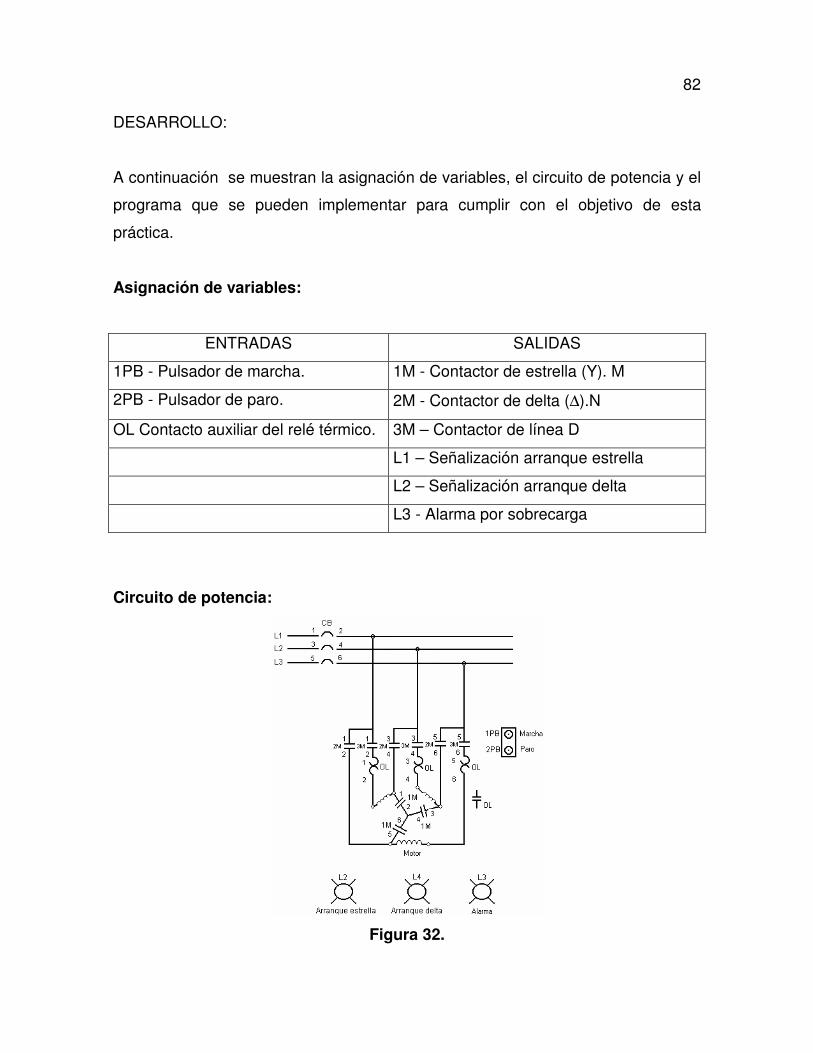
Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de marcha. 1M - Contactor de estrella (Y). M
2PB - Pulsador de paro. 2M - Contactor de delta (∆).N
OL Contacto auxiliar del relé térmico. 3M – Contactor de línea D
L1 – Señalización arranque estrella
L2 – Señalización arranque delta
L3 - Alarma por sobrecarga
Circuito de potencia:
Figura 32.
83 Programa:
84 PRÁCTICA 10
CONTROL ELECTROMAGNÉTICO DE UN MOTOR DE CA DE JAULA ARDILLA.
FRENADO ELECTROMAGNÉTICO
OBJETIVO
- Efectuar el correcto frenado electromagnético mediante las herramientas que
ofrece el PLC
- Observar los tiempos de maniobra con y sin frenado electromagnético
EJERCICIO DE APLICACIÓN:
Diseñar e implementar el programa y los circuitos necesarios para el arranque
directo en vacío de un motor trifásico CA de jaula de ardilla a plena carga con
señalización y protección contra sobrecarga.
Cuando se presione el pulsador de paro se debe frenar el motor mediante la
aplicación de CD; este control debe estar temporizado.
La actuación del relé térmico debe desconectar el motor y generar una alarma
luminosa.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
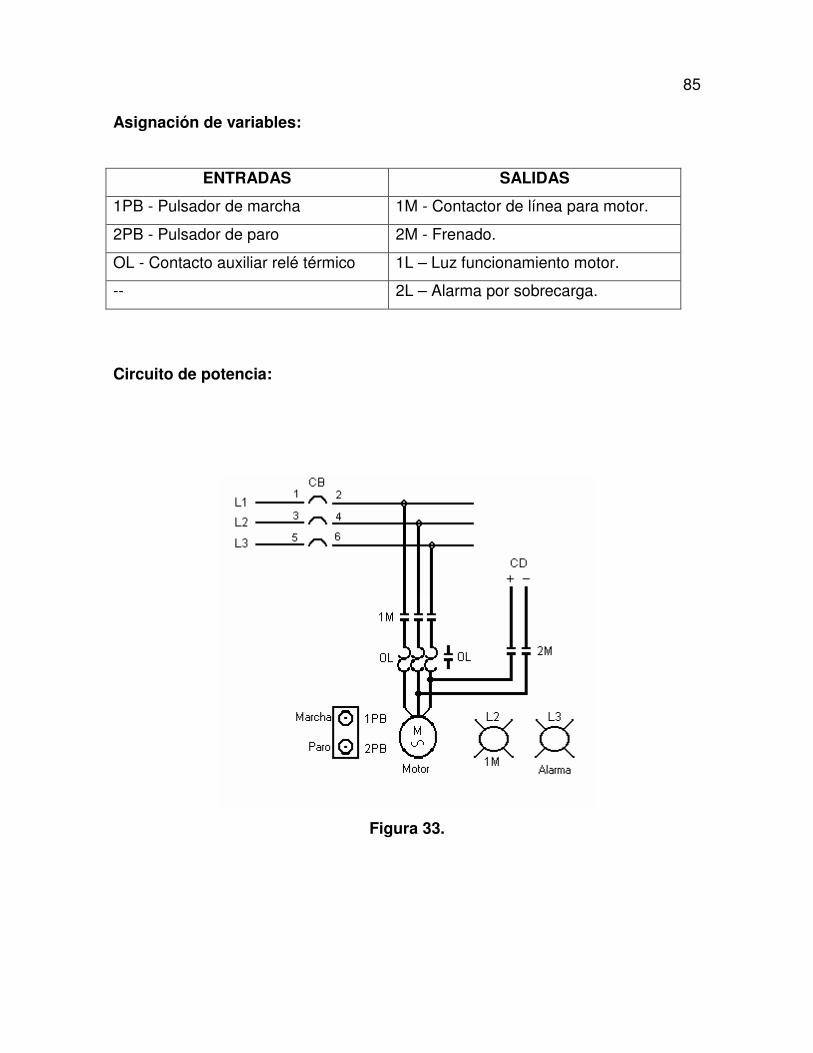
85 Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de marcha 1M - Contactor de línea para motor.
2PB - Pulsador de paro 2M - Frenado.
OL - Contacto auxiliar relé térmico 1L – Luz funcionamiento motor.
-- 2L – Alarma por sobrecarga.
Circuito de potencia:
Figura 33.
86 Programa:
87 PRÁCTICA 11
ARRANQUE ESTRELLA DELTA Y FRENADO ELECTROMAGNÉTICO
OBJETIVOS
- Combinar el arranque estrella – delta y el frenado electromagnético de un motor
utilizando el PLC y sus herramientas.
- Comparar las corrientes de arranque cuando se hace mediante el método de
estrella – delta y el directo.
EJERCICIO DE APLICACIÓN:
Diseñar e implementar el programa y circuitos necesarios para el arranque de un
motor mediante el método estrella – delta con frenado electromagnético con
protección de sobrecarga y las respectivas señalizaciones.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
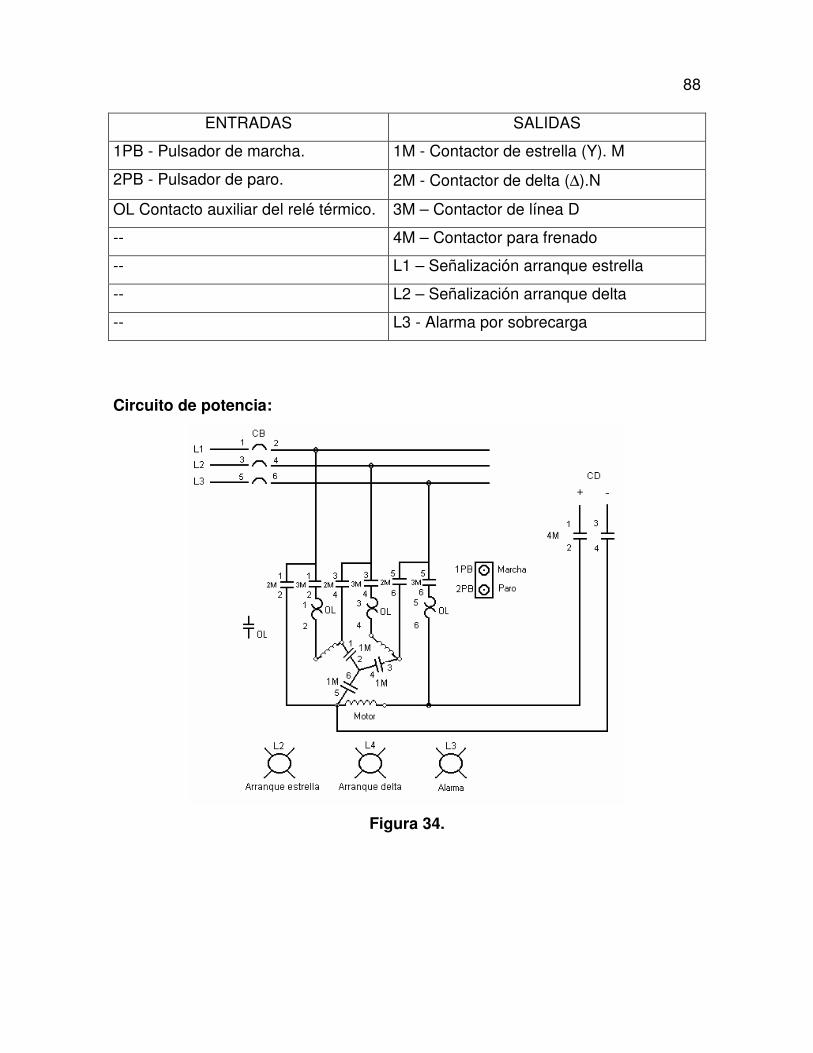
88
ENTRADAS SALIDAS
1PB - Pulsador de marcha. 1M - Contactor de estrella (Y). M
2PB - Pulsador de paro. 2M - Contactor de delta (∆).N
OL Contacto auxiliar del relé térmico. 3M – Contactor de línea D
-- 4M – Contactor para frenado
-- L1 – Señalización arranque estrella
-- L2 – Señalización arranque delta
-- L3 - Alarma por sobrecarga
Circuito de potencia:
Figura 34.
89 Programa:
90 PRÁCTICA 12
CONTROL PARA UNA ESCALERA ELECTROMECÁNICA
OBJETIVO
- Utilizar distintas herramientas que ofrece el PLC y observar como funcionan en
un ejemplo de la vida cotidiana.
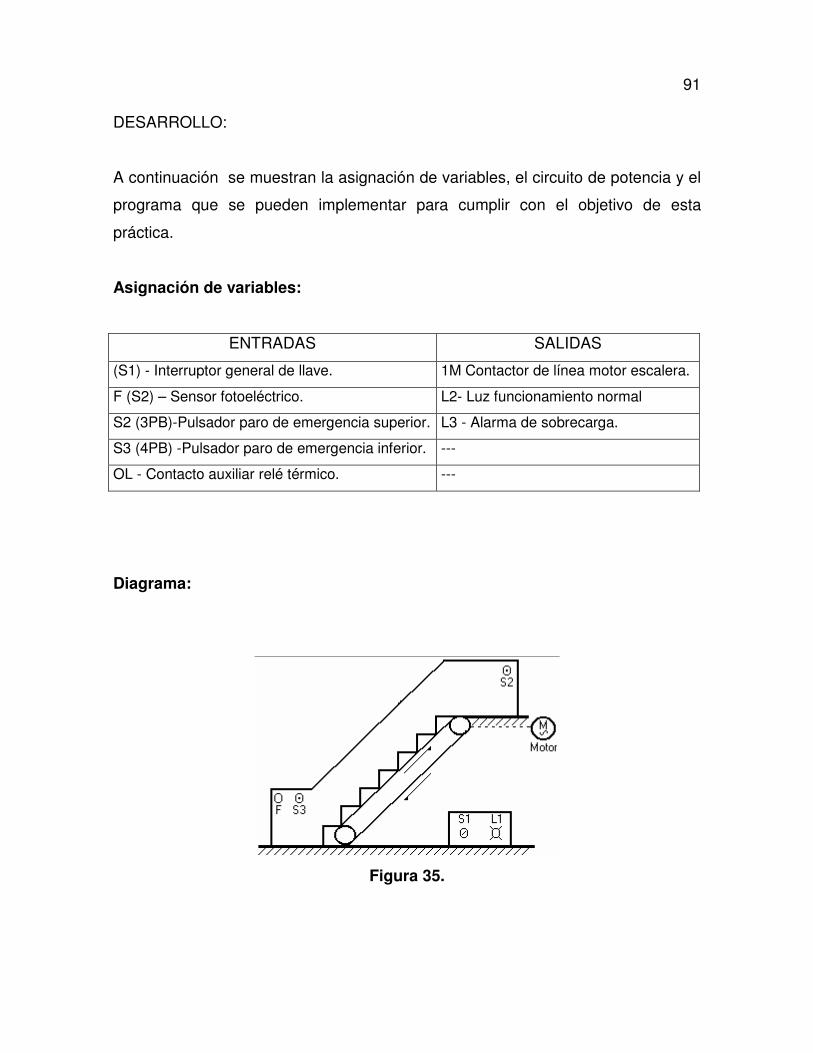
EJERCICIO DE APLICACIÓN:
Una escalera mecánica se coloca en el estado de disponibilidad para el servicio
por medio de un interruptor de llave S1. El arranque se efectúa automáticamente
al ser interrumpida una celda fotoeléctrica lo cuál debe ser señalizado mediante
una lámpara que supone que una persona ha entrado a la escalera.
Después de cada interrupción de la celda fotoeléctrica, la escalera debe
permanecer conectada durante 40 seg. La desconexión de la escalera también
puede suceder como consecuencia de:
- Actuación sobre S1 en la posición de apagado.
- El accionamiento de dos pulsadores de paro de emergencia S2 y S3.
- La actuación del relé térmico que protege el motor de la escalera. En este
caso se debe generar una alarma luminosa.
Para reiniciar el sistema se debe volver a accionar con el interruptor de llave.
91 DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
ENTRADAS SALIDAS
(S1) - Interruptor general de llave. 1M Contactor de línea motor escalera.
F (S2) – Sensor fotoeléctrico. L2- Luz funcionamiento normal
S2 (3PB)-Pulsador paro de emergencia superior. L3 - Alarma de sobrecarga.
S3 (4PB) -Pulsador paro de emergencia inferior. ---
OL - Contacto auxiliar relé térmico. ---
Diagrama:
Figura 35.
92 Programa:
93 PRÁCTICA 13
CONTROL PARA UNA BANDA TRANSPORTADORA
OBJETIVO
- Utilizar distintas herramientas que ofrece el PLC combinándolas con el uso de
sensores y observar como funcionan en un ejemplo de la industria.
EJERCICIO DE APLICACIÓN:
Se tiene una banda transportadora que debe transportar elementos que proceden
de 3 puestos diferentes de montaje.
Al colocar una pieza sobre la banda se acciona un sensor de peso (o fotoeléctrico)
S1, S2, S3 en cada punto.
En cada uno de los puestos de montaje se tiene una lámpara de señalización L2,
L3, L4 la cual se enciende cuando es activado el respectivo sensor de peso.
Después de la colocación del último elemento de montaje se arranca el motor de
la banda de forma automática.
El motor permanece conectado durante 30 seg., que es el tiempo de transporte
entre el puesto N1 y el recolector. Después de este tiempo se detiene la banda
automáticamente, apagándose las lámparas de cada puesto. Con ello se indica
que puede reiniciar el proceso.
La actuación del relé térmico que protege el motor de la escalera. En este caso se
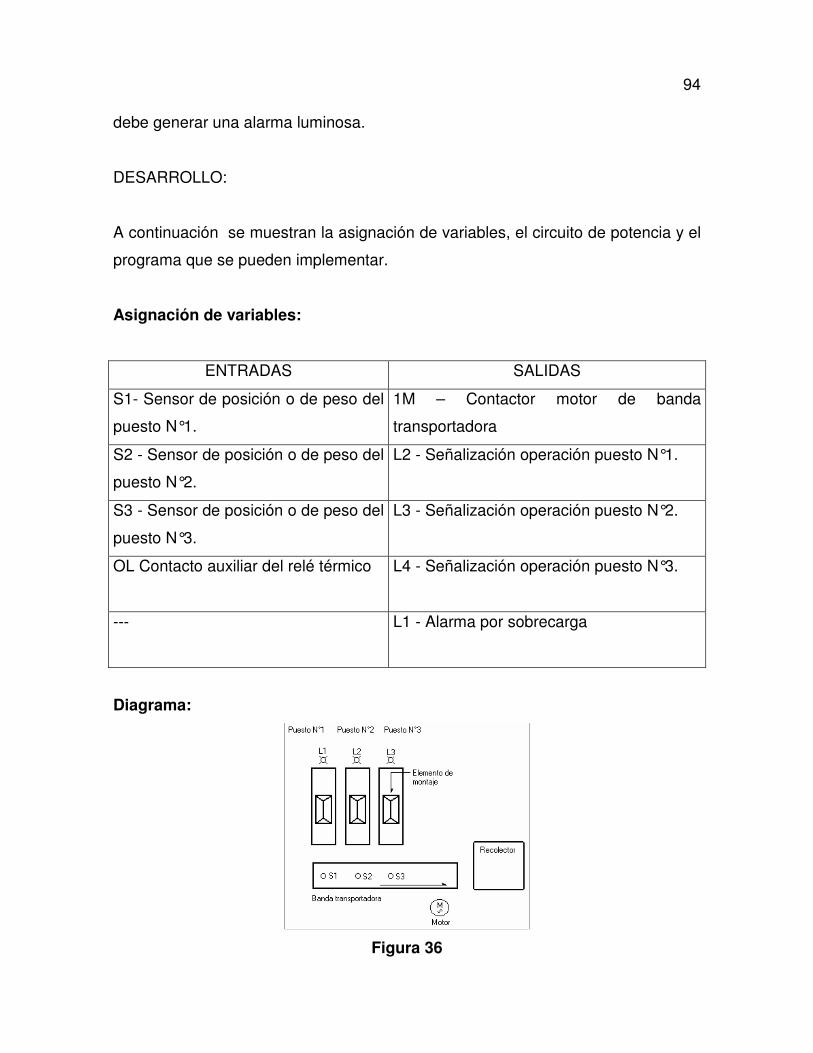
94 debe generar una alarma luminosa.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar.
Asignación de variables:
ENTRADAS SALIDAS
S1- Sensor de posición o de peso del
puesto N°1.
1M – Contactor motor de banda
transportadora
S2 - Sensor de posición o de peso del
puesto N°2.
L2 - Señalización operación puesto N°1.
S3 - Sensor de posición o de peso del
puesto N°3.
L3 - Señalización operación puesto N°2.
OL Contacto auxiliar del relé térmico
L4 - Señalización operación puesto N°3.
--- L1 - Alarma por sobrecarga
Diagrama:
Figura 36
95 Programa:

96 PRÁCTICA 14
CONTADOR DE OBJETOS PARA BANDA TRANSPORTADORA.
OBJETIVO
Utilizar distintas herramientas que ofrece el PLC combinándolas con el uso de
sensores y observar como funcionan en un ejemplo de la industria.
EJERCICIO DE APLICACIÓN:
Se desea implementar un circuito para el conteo de los objetos que se desplazan
sobre una banda transportadora.
Al presionarse 1PB debe ponerse en funcionamiento la banda transportadora con
señalización de funcionamiento.
Cada vez que un objeto interrumpe el rayo de luz, el sensor fotoeléctrico genera
un impulso sobre la entrada del contador el cual está programado para un
acumulado de 100.
Al presentarse el lleno del contador el motor debe desconectarse automáticamente
y generar durante 30 seg. una señal de alarma luminosa por medio de L3. Así
mismo, el contador debe reposicionarse en ceros para disponer de un nuevo
conteo a partir del instante en que se vuelva a poner en funcionamiento la banda
transportadora.
Con el pulsador 2PB se detiene a voluntad la banda transportadora.
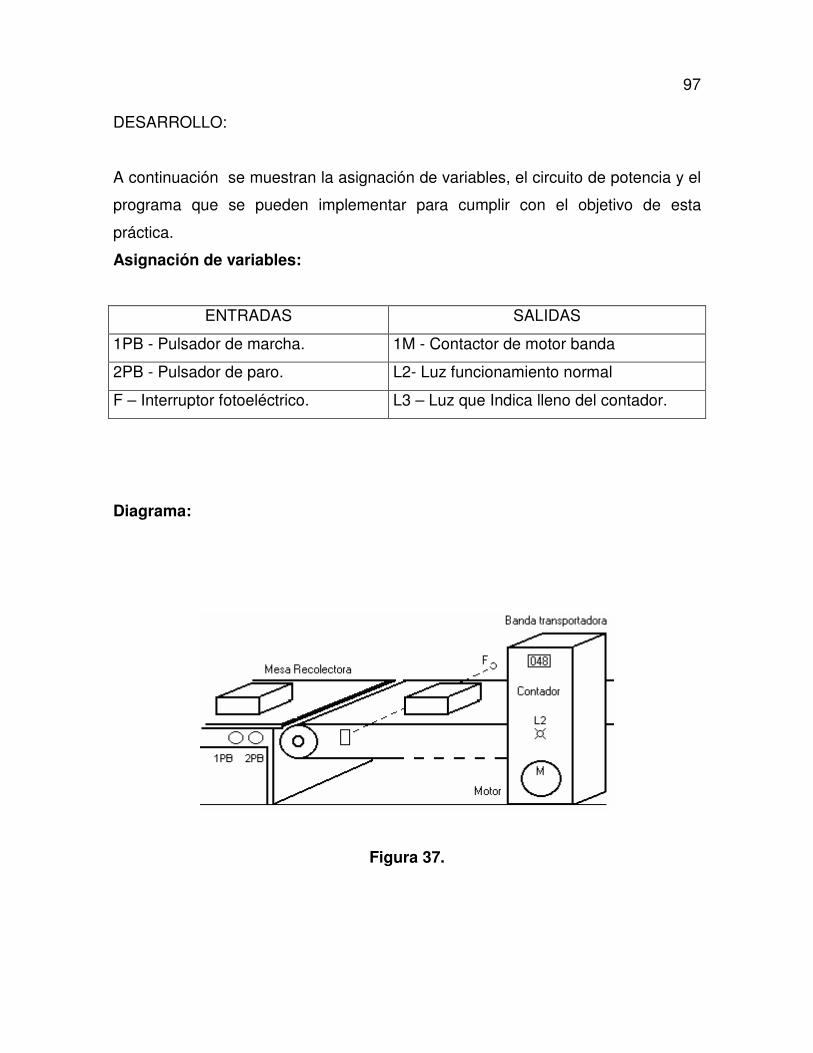
97 DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
ENTRADAS SALIDAS
1PB - Pulsador de marcha. 1M - Contactor de motor banda
2PB - Pulsador de paro. L2- Luz funcionamiento normal
F – Interruptor fotoeléctrico. L3 – Luz que Indica lleno del contador.
Diagrama:
Figura 37.
98 Programa:
99 PRÁCTICA 15
CONTROL FORWARD – REVERSE PARA UN MOTOR AC DE JAULA DE
ARDILLA
OBJETIVO
Diseñar e implementar el programa y circuito para realizar el arranque directo de
un motor.
EJERCICIO DE APLICACIÓN:
Controlar un motor de CA de jaula de ardilla mediante arranque directo, con
inversión de marcha en transición abierta con señalización de funcionamiento y
falla por sobrecarga y falla de pulsación. Para garantizar la transición abierta, el
selector debe estar el estado neutro.
La actuación de un relé térmico debe desconectar el sistema y generar una alarma
luminosa.
Además se debe contar con un pulsador que habilite el proceso después de una
falla (reset).
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
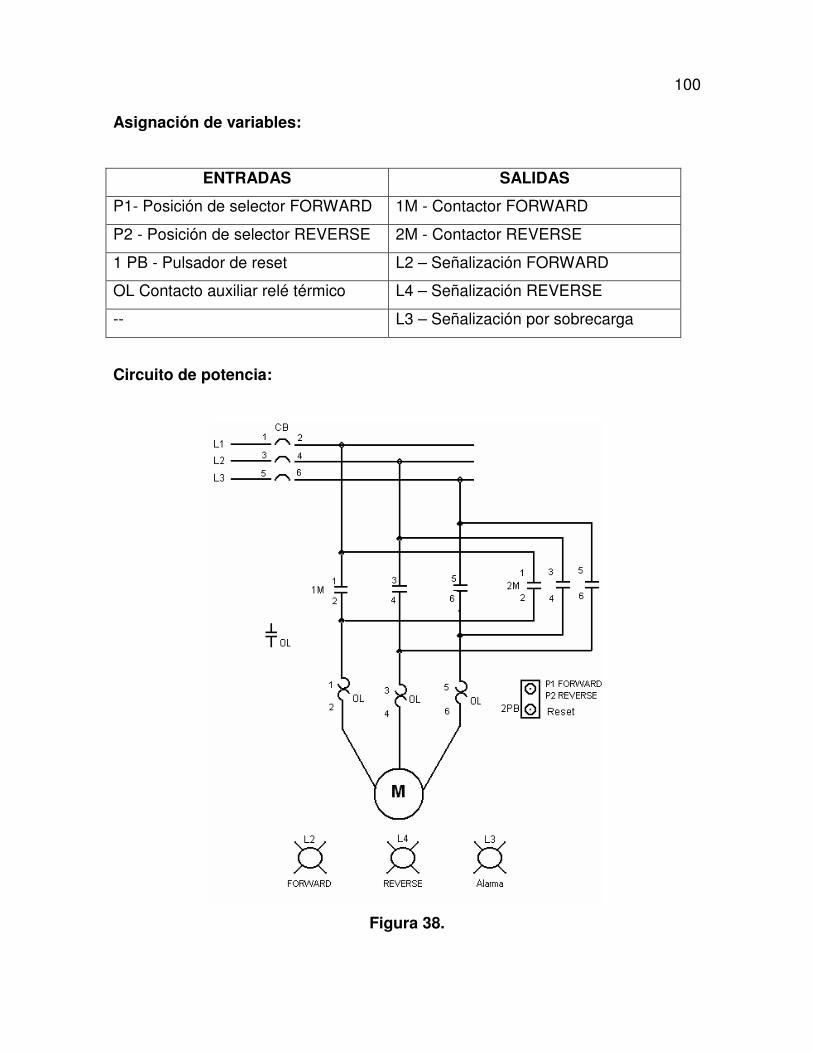
100 Asignación de variables:
ENTRADAS SALIDAS
P1- Posición de selector FORWARD 1M - Contactor FORWARD
P2 - Posición de selector REVERSE 2M - Contactor REVERSE
1 PB - Pulsador de reset L2 – Señalización FORWARD
OL Contacto auxiliar relé térmico L4 – Señalización REVERSE
-- L3 – Señalización por sobrecarga
Circuito de potencia:
Figura 38.
101 Programa:
102 PRÁCTICA 16
CONTROL ELECTROMAGNÉTICO PARA UN MOTOR DE ROTOR DEVANADO
CON CAMBIO SELECTIVO DE VELOCIDAD
OBJETIVO
Diseñar e implementar el programa y circuitos necesarios para efectuar un
arranque directo y cambio selectivo de velocidad de un motor de rotor devanado.
EJERCICIO DE APLICACIÓN:
Se desea implementar un circuito que efectúe sobre un motor de rotor devanado lo
siguiente:
- Arranque directo
- Variación de velocidad por medio de un selector de dos posiciones con
señalización para cada velocidad.
- Protección contra sobrecarga por medio de un relé térmico el cuál debe
desconectar el sistema y generar una alarma luminosa.
- Pulsador de reset.
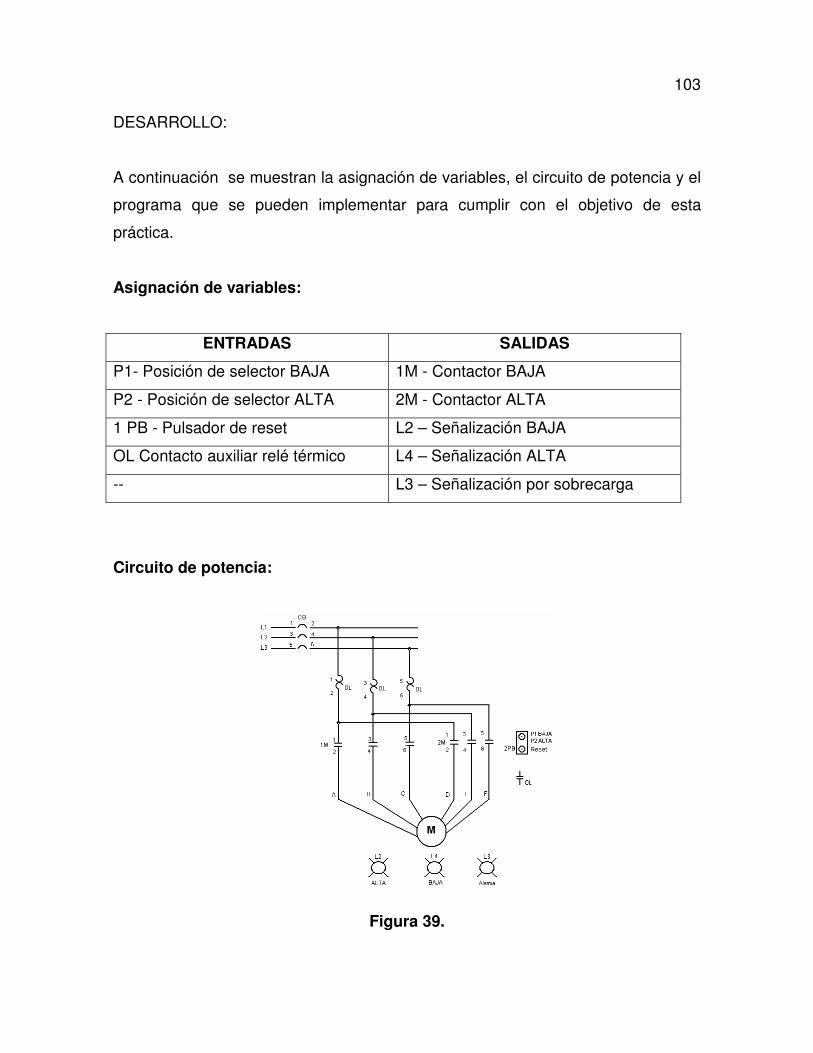
103 DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
ENTRADAS SALIDAS
P1- Posición de selector BAJA 1M - Contactor BAJA
P2 - Posición de selector ALTA 2M - Contactor ALTA
1 PB - Pulsador de reset L2 – Señalización BAJA
OL Contacto auxiliar relé térmico L4 – Señalización ALTA
-- L3 – Señalización por sobrecarga
Circuito de potencia:
Figura 39.
104 Programa:
105
6. CONCLUSIONES
El diseño, la implementación y la posterior verificación de los cuatro tableros
simuladores para PLC fueron realizados teniendo como base los preceptos
adquiridos a través del pregrado. Materias tales como Máquinas Eléctricas,
Laboratorio de Máquinas Eléctricas, Control Industrial, Laboratorio de Control
Industrial, Fundamentos de Programación y Microprocesadores, entre otras,
aportaron los elementos necesarios para realizar el cableado de los tableros y la
programación de los PLC. Esto supone una adquisición de elementos importantes
y valederos a lo largo de la carrera de Ingeniería Electrónica.
Los tableros realizados presentan todas las condiciones funcionales, estéticas y la
robustez que demanda cualquier trabajo para los Laboratorios de Ingeniería
Eléctrica-Electrónica de la U.P.B. Elementos de la mejor calidad conforman
dichos tableros; Contactores y Relés Lovato, PLC Siemens, Pulsadores
Telemecanique, entre otros, fueron proporcionados por la Universidad Pontificia
Bolivariana.
Las pruebas realizadas a los cuatro tableros fueron de entera satisfacción,
facilidad en las conexiones posteriores, facilidad en el desplazamiento,
funcionamiento normal de todos los elementos eléctricos y compatibilidad con los
elementos ya existentes en el Laboratorio proporcionan dicha conformidad.
Se constituyen entonces en un esfuerzo importante en aras de reforzar el área de
automatización y el conocimiento básico de manejo de PLC.
106
Las prácticas planteadas en la guía constituyen una fácil y adecuada instrucción
para los estudiantes, presentando una escala ascendente en cuanto a complejidad
se refiere; niveles bajos (conocimiento y manejo de PLC), niveles medios (manejo
de contactores, arranque y frenado de motores) y niveles avanzados (utilización
de sensores), posibilitan el rápido aprendizaje.
La conjunción del montaje físico con las prácticas esbozadas en esta tesis
configuran la posibilidad de constituir un Laboratorio exclusivo para
Automatización.
Mediante el uso de los tableros de PLC, la elaboración de las practicas
propuestas y a través del trabajo dirigido se permitirá al estudiante la
comprensión y entendimiento que necesita para afianzar sus conocimientos en
estás aplicaciones tan importantes hoy en día en el ámbito del control industrial.
La construcción de los tableros además de complementar la infraestructura
establecida en los laboratorios de ingeniería eléctrica y electrónica, le posibilita
al estudiante aplicar los conocimientos y capacidades adquiridas en diversas
materias de la ingeniería, conjugándolas y elaborando procesos de
pensamiento estructurado cuando los ejercicios de aplicación sean realizados,
entrenando y afianzando así sus competencias a la hora de enfrentarse al
mundo laboral.
Mediante el desarrollo de este proyecto se ayuda a la docencia contribuyendo
en forma directa, brindando herramientas de conocimiento y aplicación, que
incrementan notoriamente la calidad de la formación profesional en la facultad.
Los tableros de PLC utilizan tecnología que está a la vanguardia del mundo
industrial y sus necesidades, lo cual es de gran importancia para la formación y
preparación de los ingenieros de hoy.
107
BIBLIOGRAFÍA
BETANCUR J, Patricia. Rediseño y Montaje de los Tableros de Control Industrial para el Laboratorio de Ingeniería Eléctrica y Electrónica. Medellín, 1998. 118p. Trabajo de Grado (Ingeniero Electricista). U.P.B. Facultad de Ingeniería Eléctrica. BOLTON, W. Instrumentation and control systems. New York: Elsevier, 2004. ESCOBAR ZULUAGA, Antonio. Autómatas Programables o PLC. En: Electrónica y Computadores. Pereira. Vol 1, No 4 (1994); p. 39-43. LEMA RESTREPO, José. Entrenador para PLC. Medellín, 2003. 126p. Trabajo de Grado (Ingeniero Electricista). U.P.B. Facultad de Ingeniería Eléctrica. LOVATO. Catálogos Fabricante. RAMOS R, Guillermo. Los PLC. En: Electrónica y Computadores. Pereira. Vol 4, No 3(1997); p 45-48. SIEMENS. Catálogos Fabricante. SIEMENS Manual de referencia del PLC Siemens S7-200, CPU 226. Alemania: SIEMENS S.A., 2000. 520p. SIEMENS TD 200 Manual del usuario. Alemania: SIEMENS S.A., 2000. 134p. SIEMENS Manual de referencia del PLC Siemens S7-200, CPU 226. España: SIEMENS S.A., 2000. 320p. TELEMECANIQUE. Catálogos Fabricante. VALENCIA GALLÓN, Hernán. Fundamentos de los Sistemas de Control Eléctricos, 2001. 320p. Trabajo de Grado (Ingeniero Electricista). U.P.B. Facultad de Ingeniería Eléctrica.

108
ANEXO A
ESPECIFICACIONES TÉCNICAS PLC SIEMENS S7 – 200 CPU 226
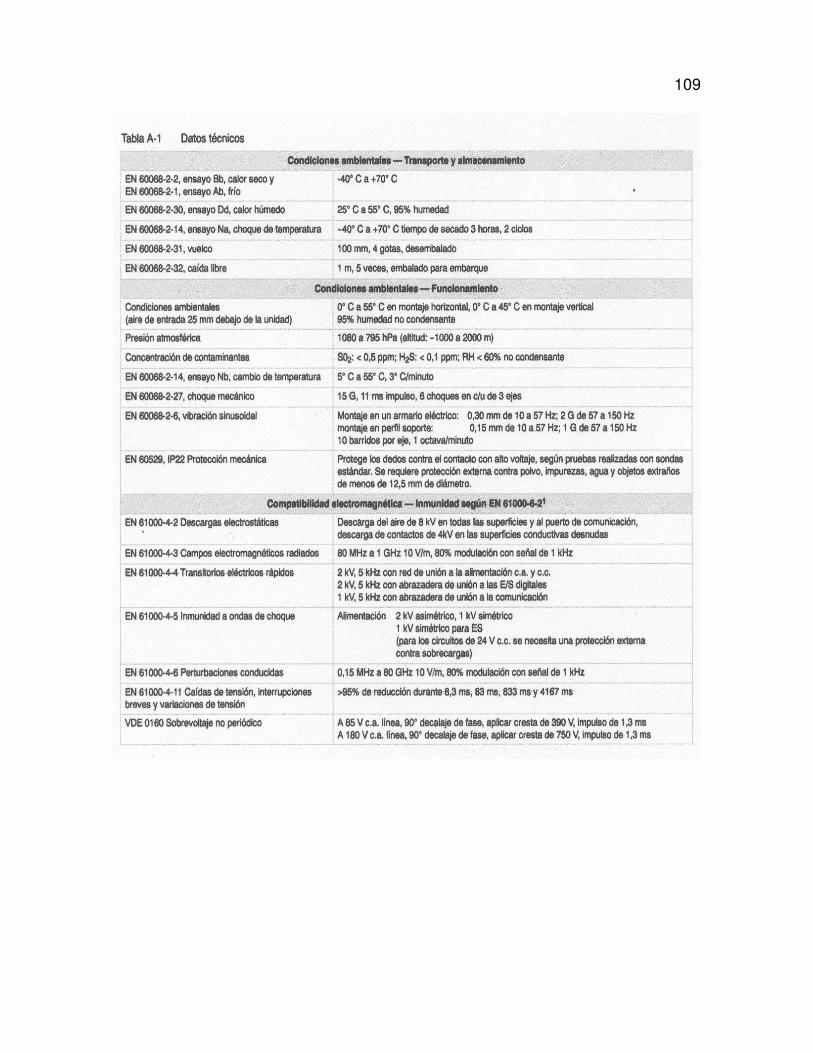
109
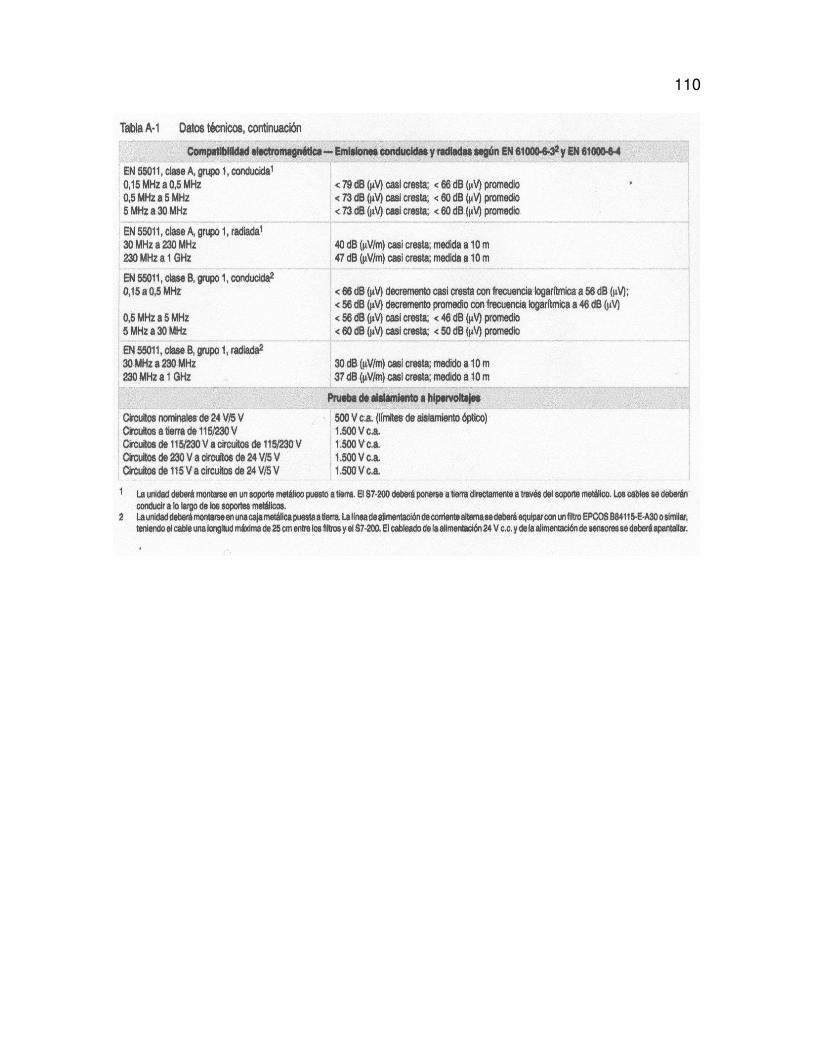
110
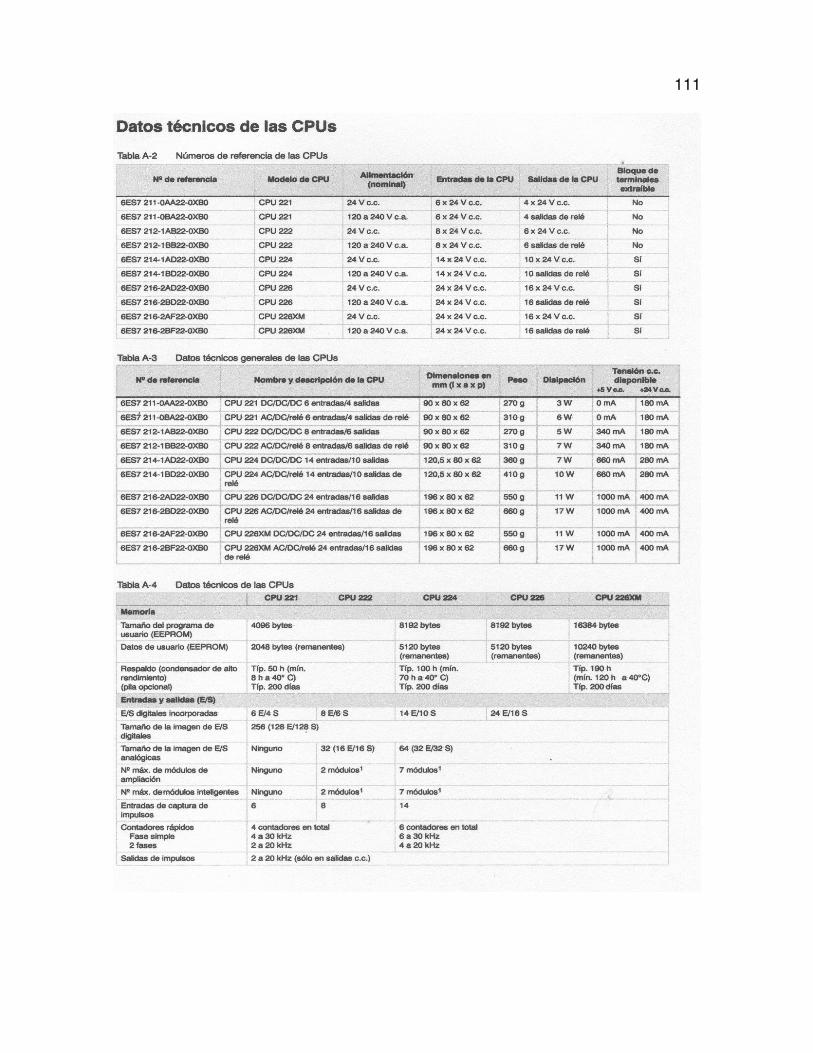
111
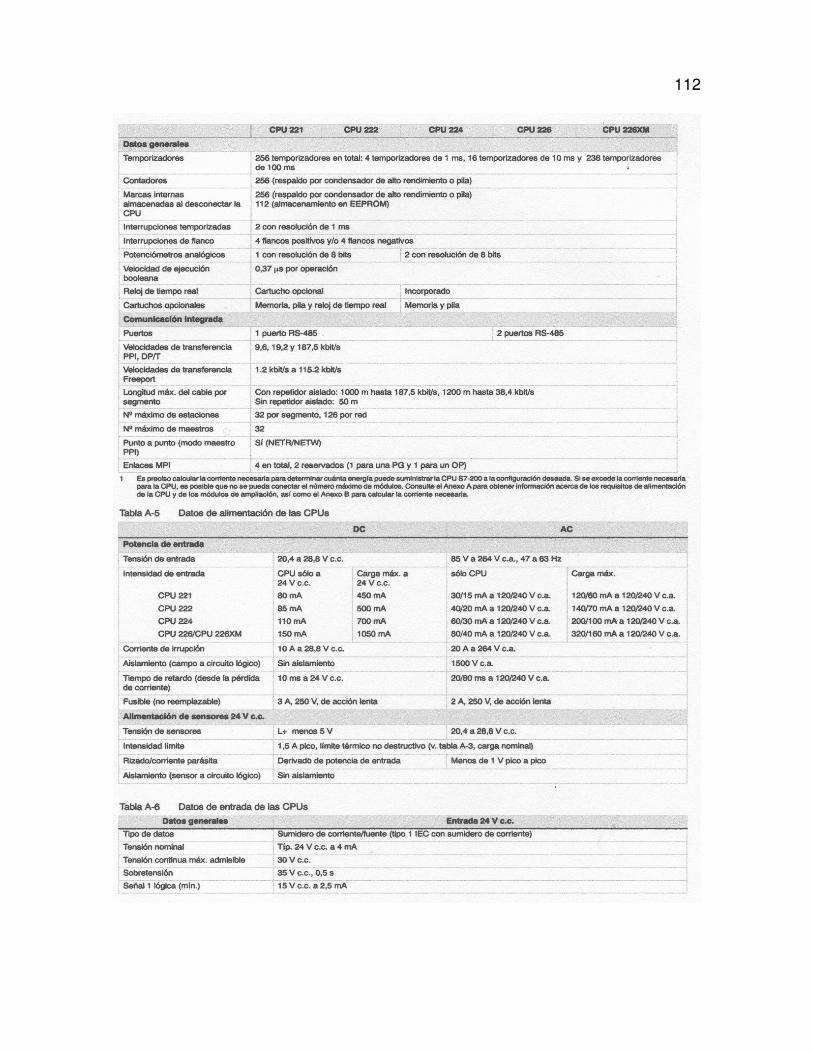
112
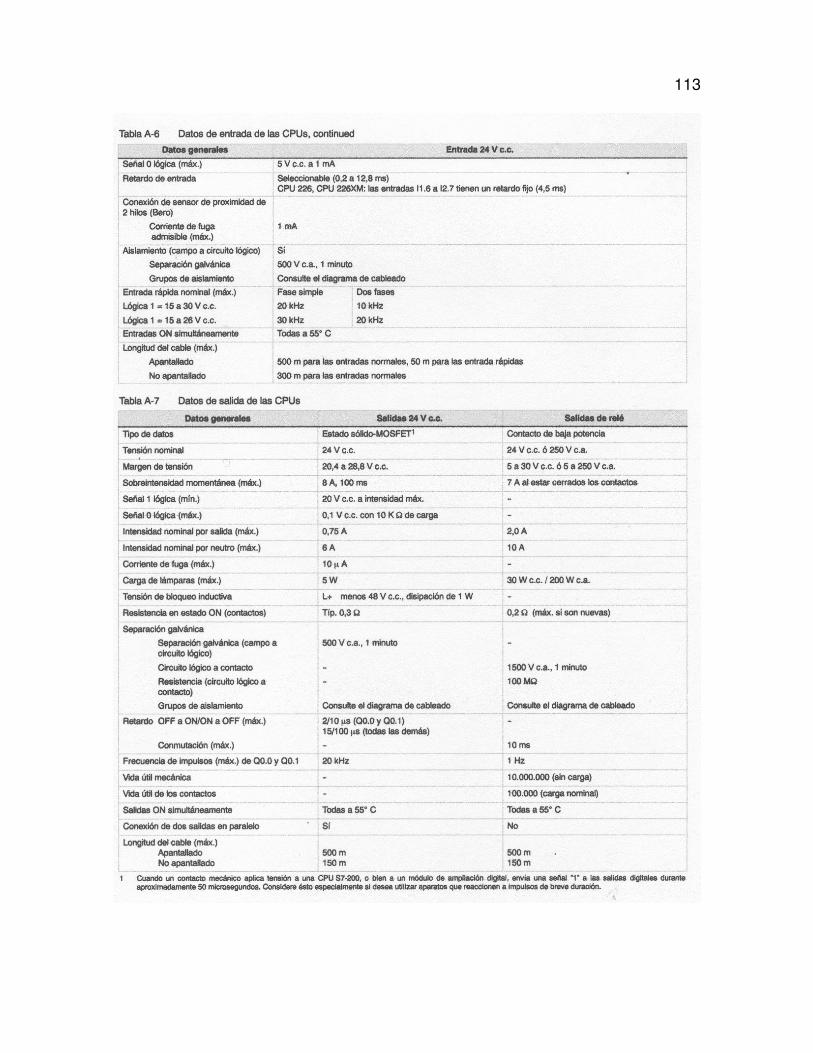
113
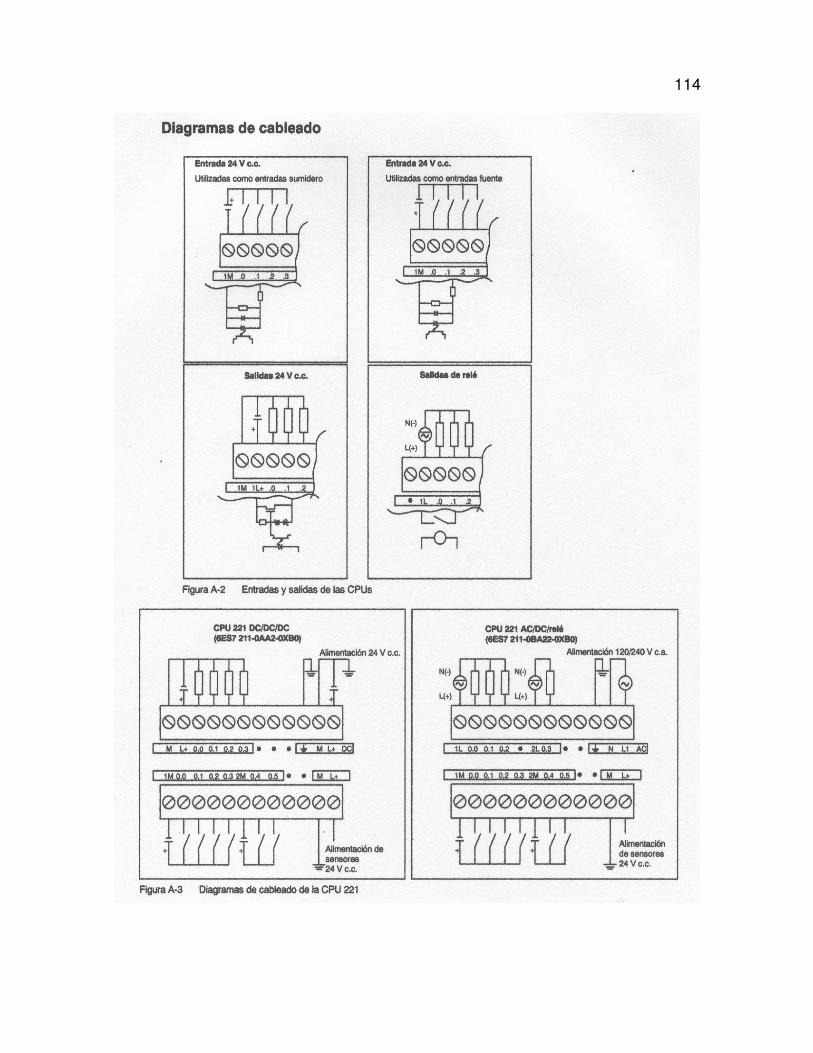
114
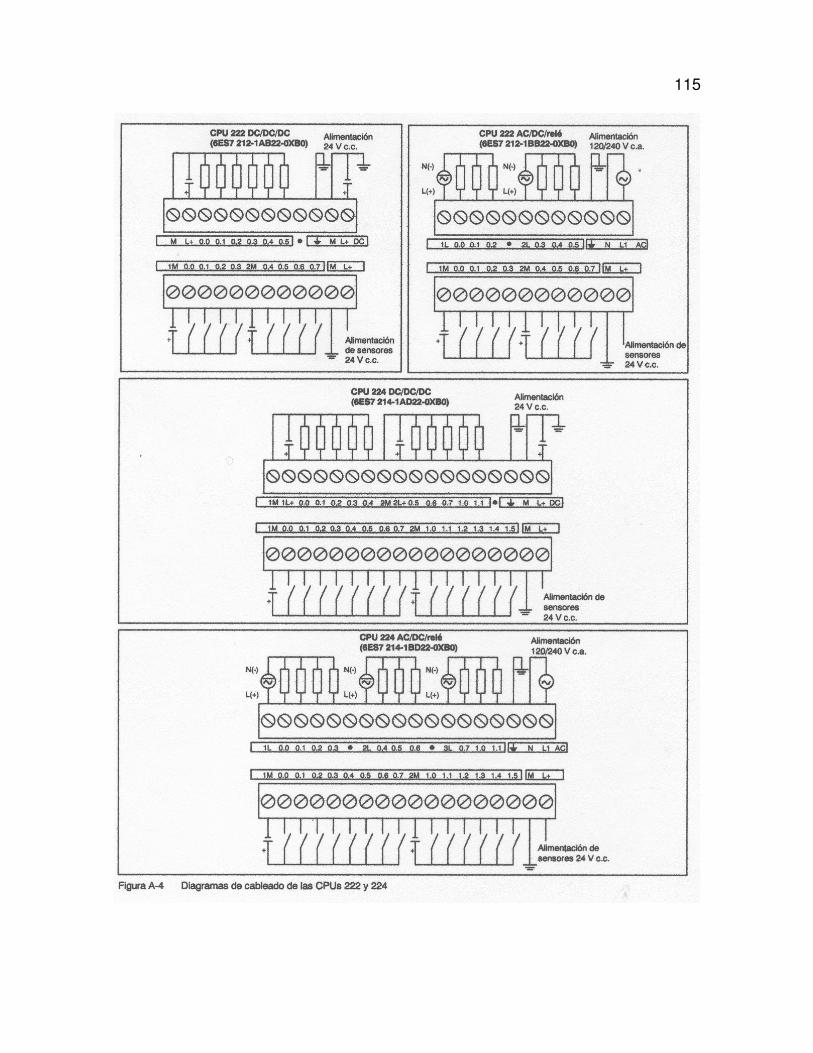
115
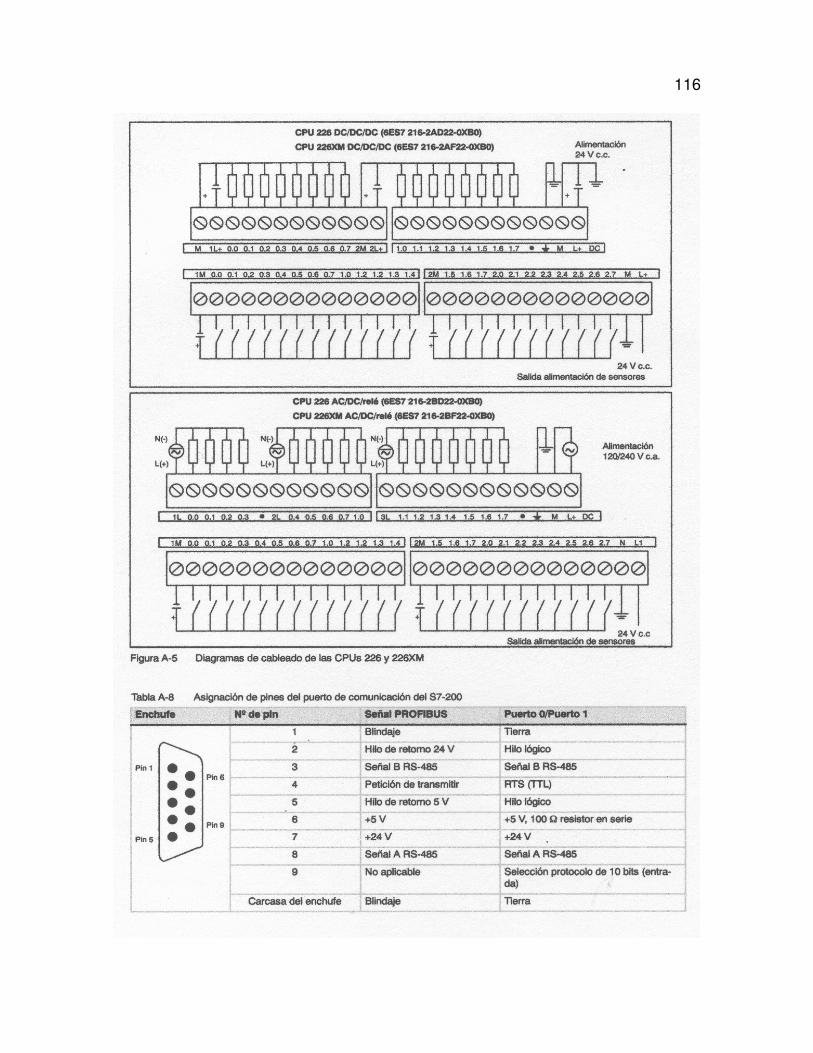
116
117
ANEXO B
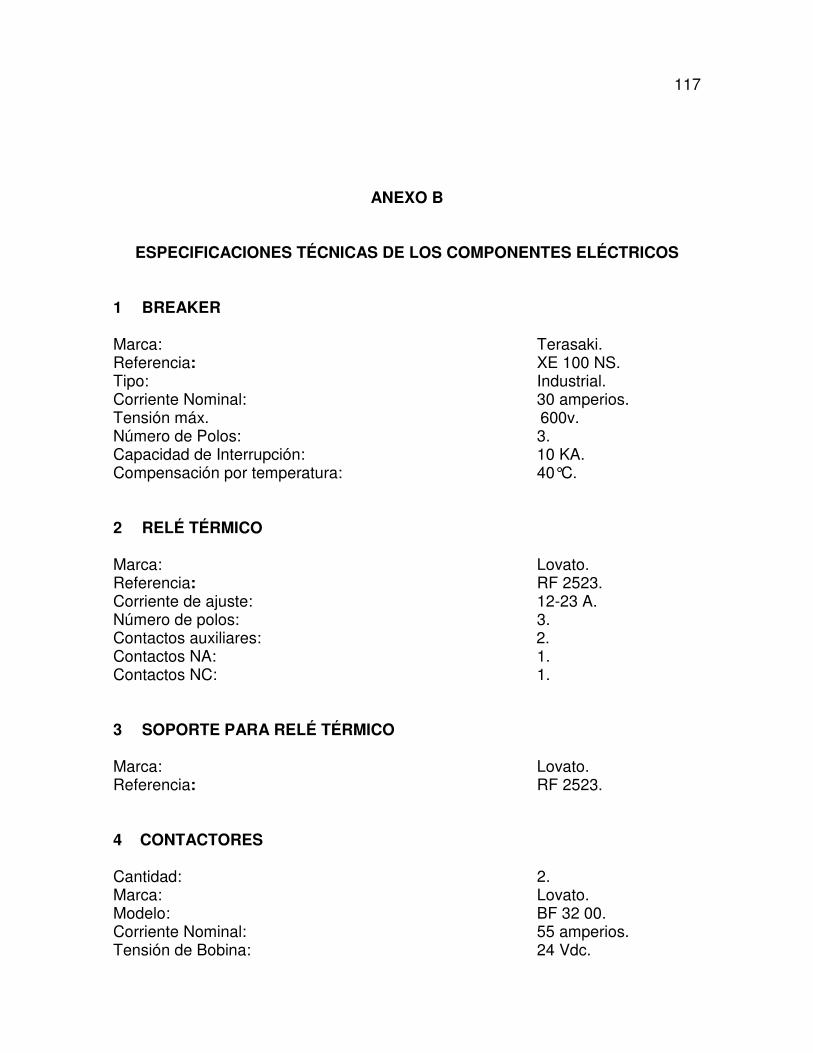
ESPECIFICACIONES TÉCNICAS DE LOS COMPONENTES ELÉCTRICOS
1 BREAKER Marca: Terasaki. Referencia: XE 100 NS. Tipo: Industrial. Corriente Nominal: 30 amperios. Tensión máx. 600v. Número de Polos: 3. Capacidad de Interrupción: 10 KA. Compensación por temperatura: 40°C. 2 RELÉ TÉRMICO Marca: Lovato. Referencia: RF 2523. Corriente de ajuste: 12-23 A. Número de polos: 3. Contactos auxiliares: 2. Contactos NA: 1. Contactos NC: 1. 3 SOPORTE PARA RELÉ TÉRMICO Marca: Lovato. Referencia: RF 2523. 4 CONTACTORES Cantidad: 2. Marca: Lovato. Modelo: BF 32 00. Corriente Nominal: 55 amperios. Tensión de Bobina: 24 Vdc.
118
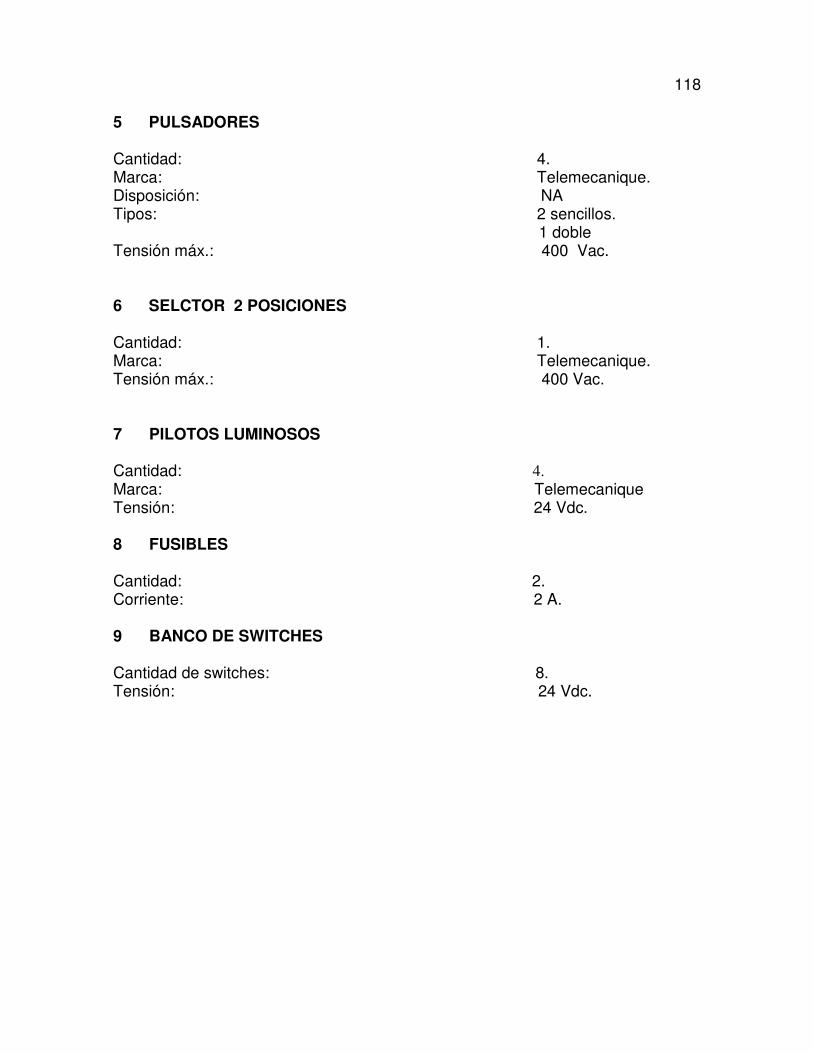
5 PULSADORES Cantidad: 4. Marca: Telemecanique. Disposición: NA Tipos: 2 sencillos. 1 doble Tensión máx.: 400 Vac. 6 SELCTOR 2 POSICIONES Cantidad: 1. Marca: Telemecanique. Tensión máx.: 400 Vac. 7 PILOTOS LUMINOSOS Cantidad: 4. Marca: Telemecanique Tensión: 24 Vdc. 8 FUSIBLES Cantidad: 2. Corriente: 2 A. 9 BANCO DE SWITCHES Cantidad de switches: 8. Tensión: 24 Vdc.
119
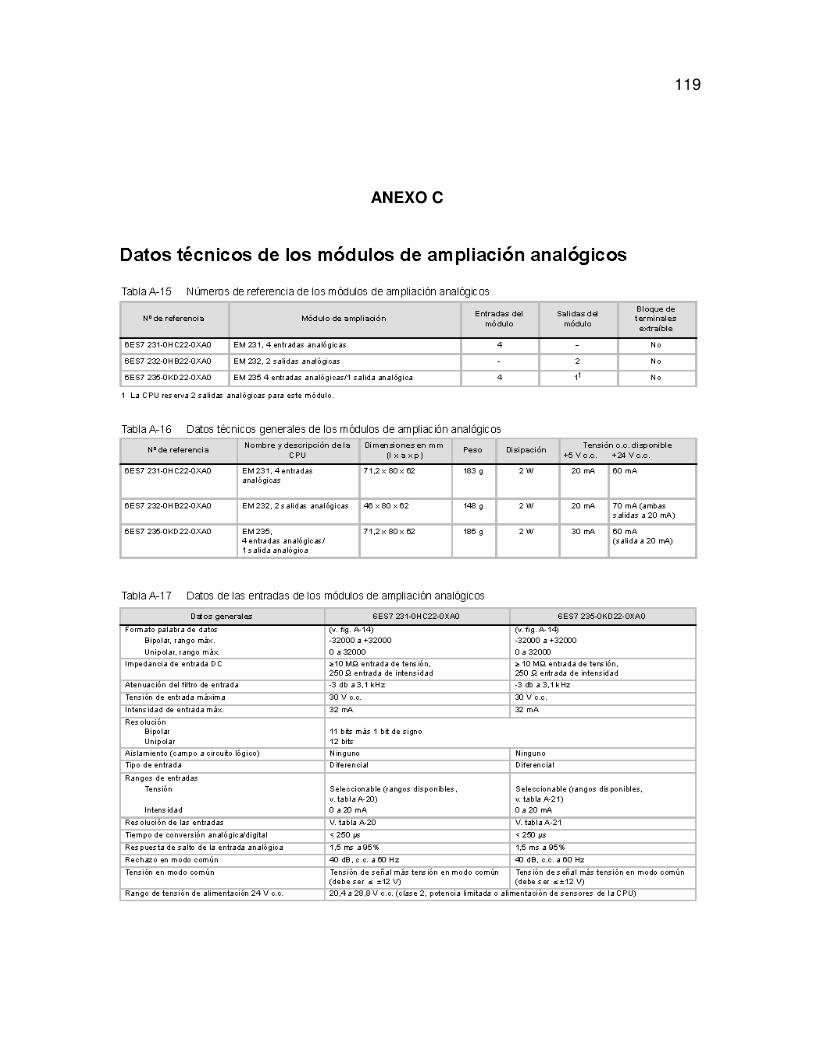
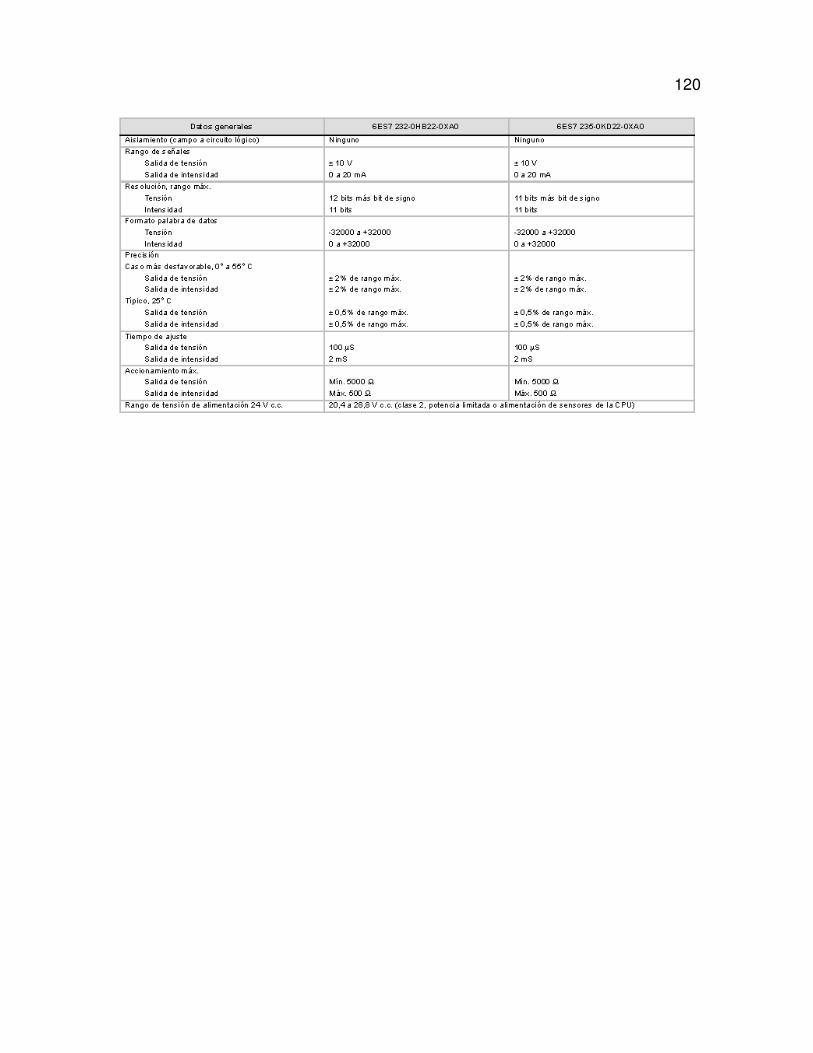
ANEXO C
120
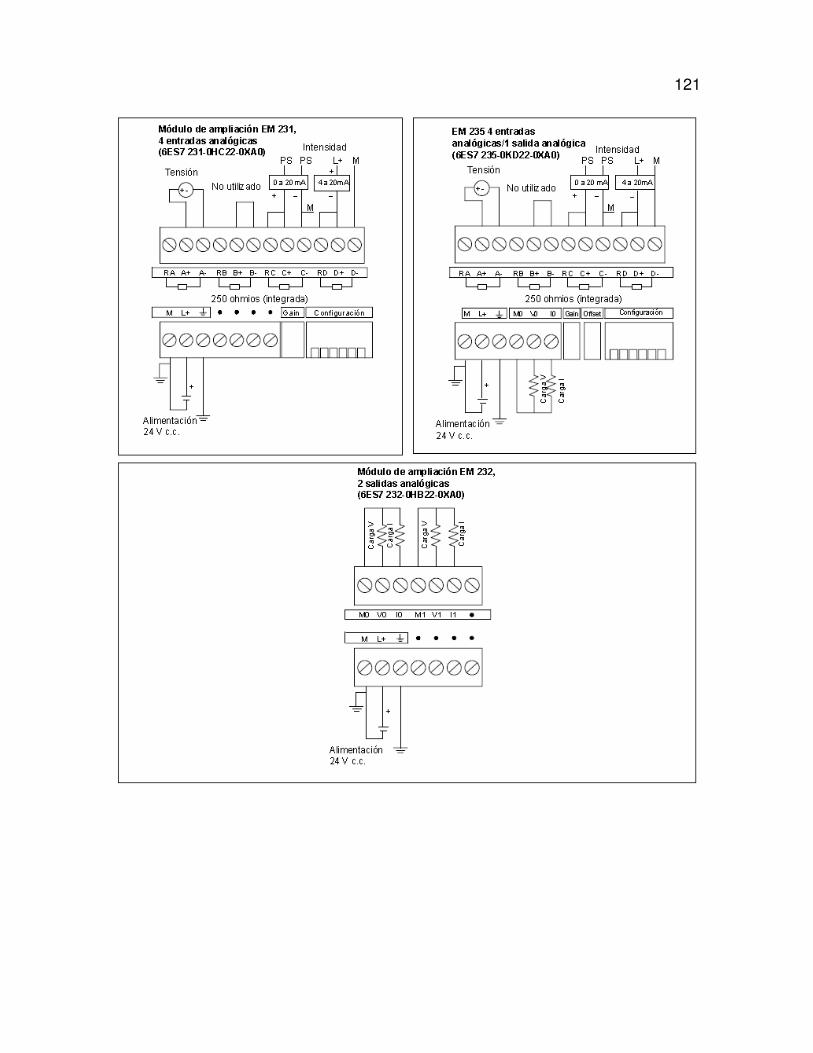
121
122
123
124
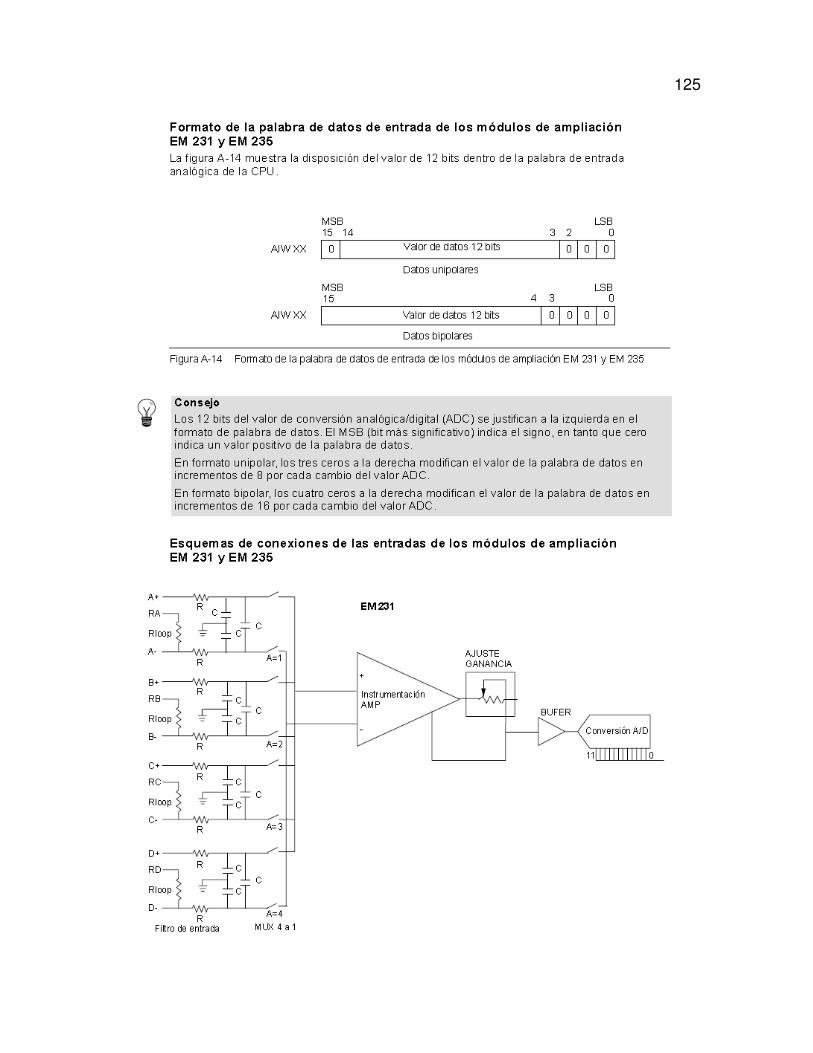
125
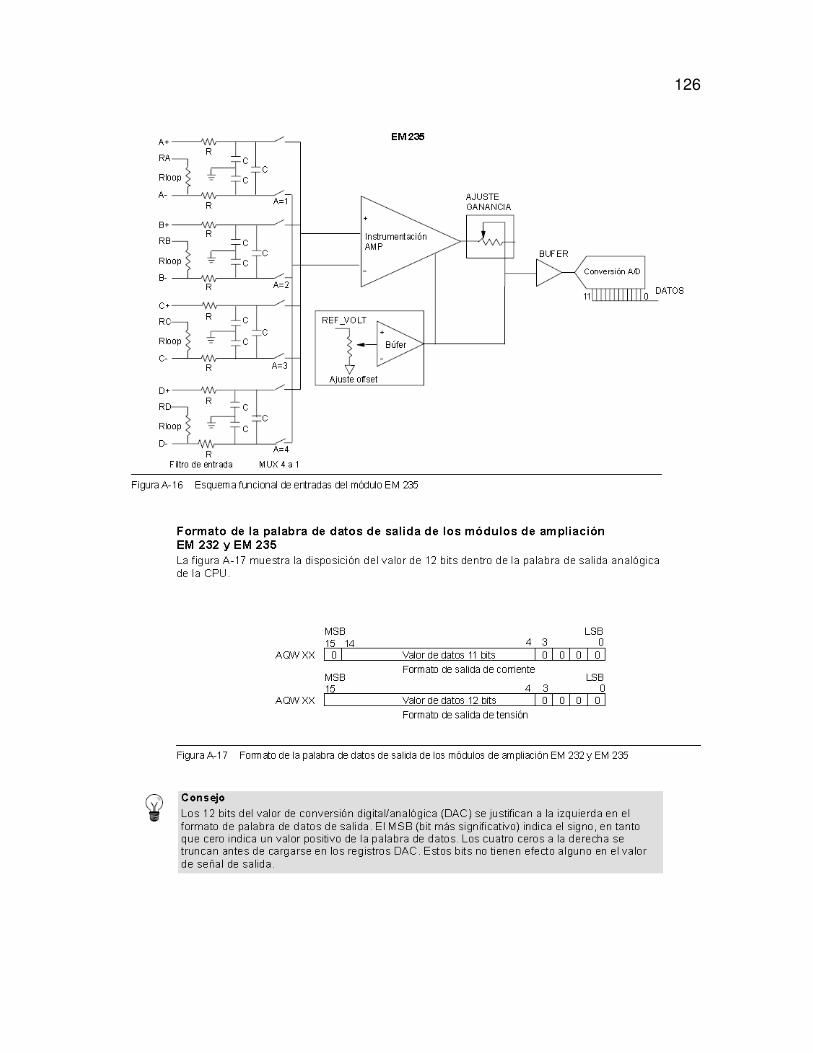
126
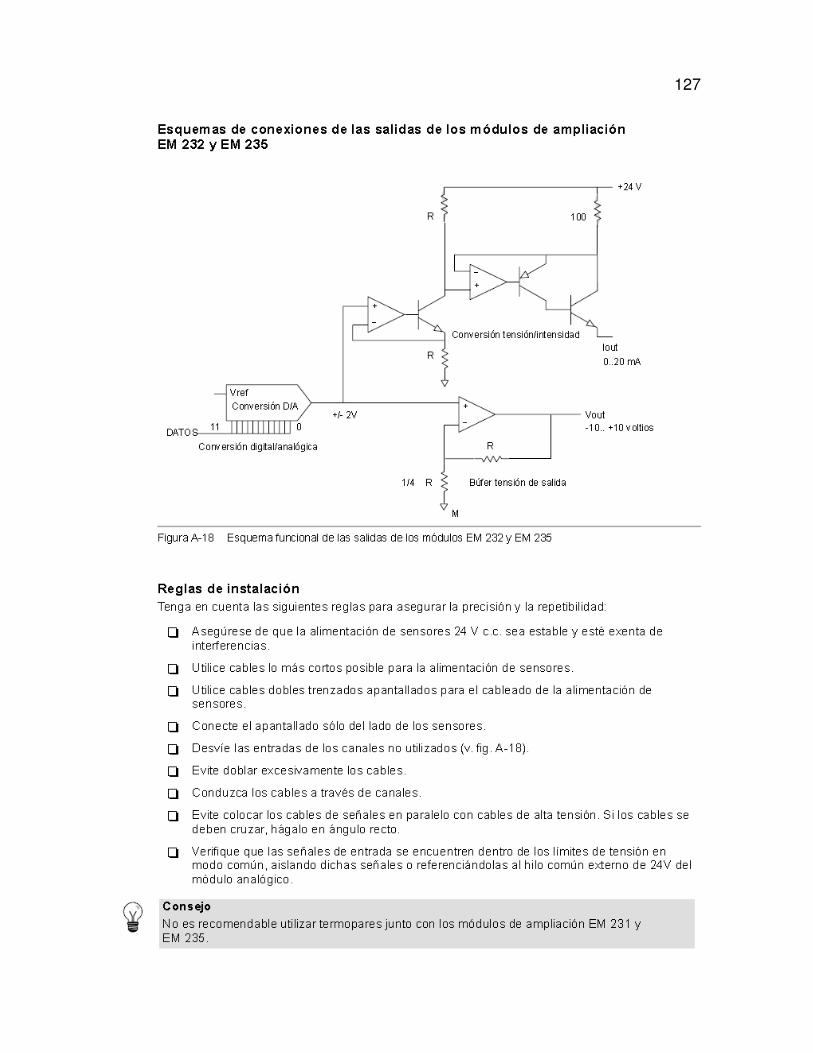
127
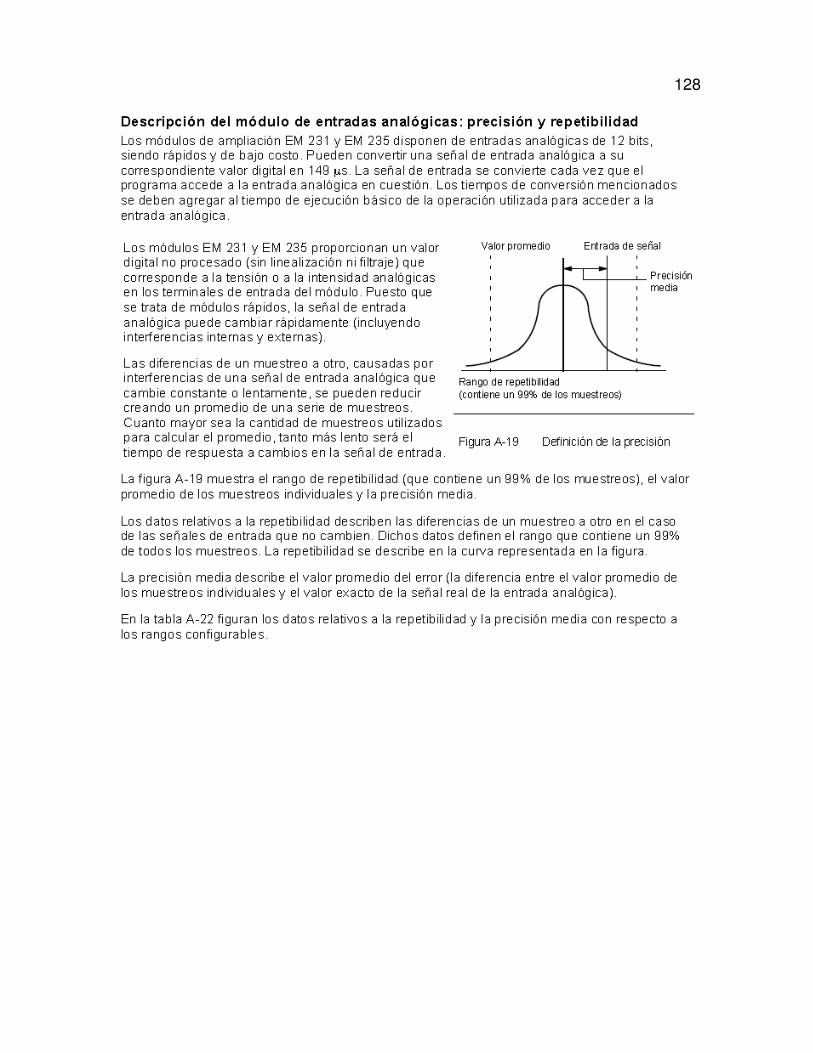
128
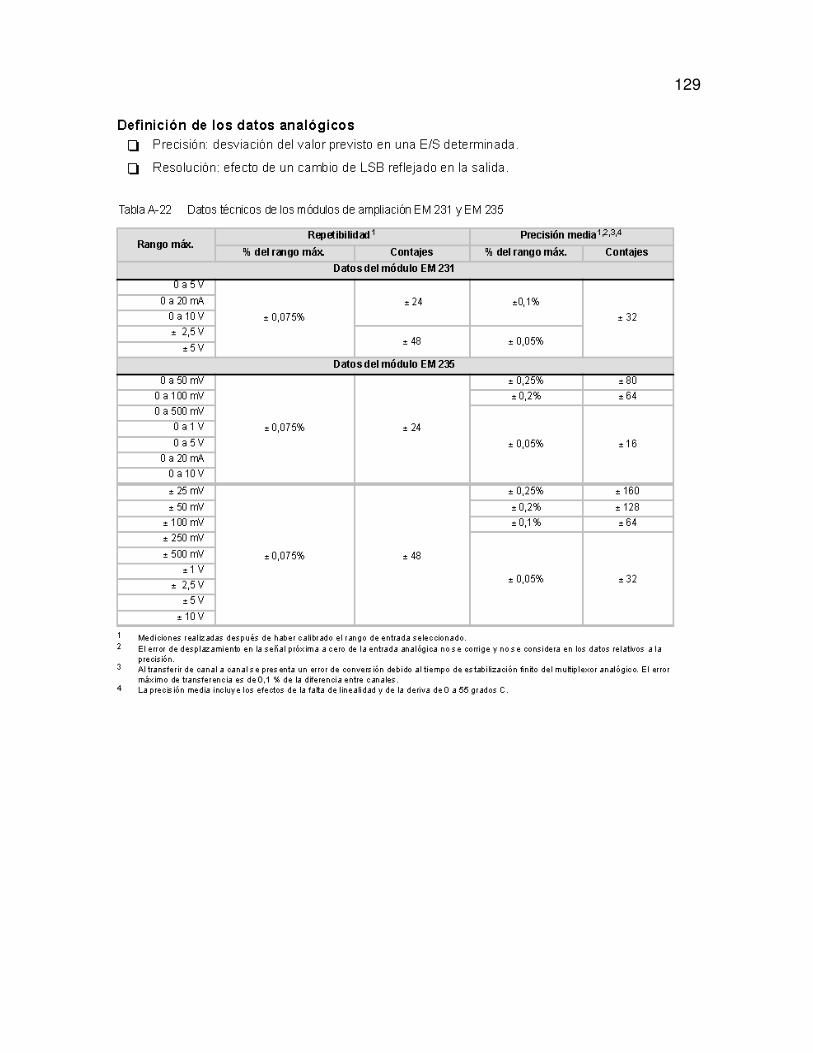
129
130
ANEXO D
ACERCA DEL TD 200
El TD 200 es un visualizador de textos y un interface entre el operador y el PLC.
Con el TD 200 se pueden ejecutar las siguientes funciones:
- Visualizar mensajes leídos de la CPU S7-200.
- Ajustar determinadas variables de programa.
- Forzar/desforzar entradas y salidas (E/S).
- Ajustar la hora y la fecha de las CPU´s que incorporen un reloj de tiempo real.
- Utilizar menús e indicadores en seis idiomas (inglés, alemán, francés, español,
italiano y chino).
- Utilizar diversos juegos de caracteres que soportan los idiomas de Europa
occidental, eslavos y chinos.
- El TD 200 es alimentado desde la CPU S7-200 a través del cable TD/CPU o
desde una fuente de alimentación independiente.
1. COMPONENTES DEL TD 200
El TD 200 es un pequeño equipo compacto que incorpora todos los componentes
necesarios para manejar y observar la CPU S7-200. La figura 1 muestra los
principales componentes del TD 200.
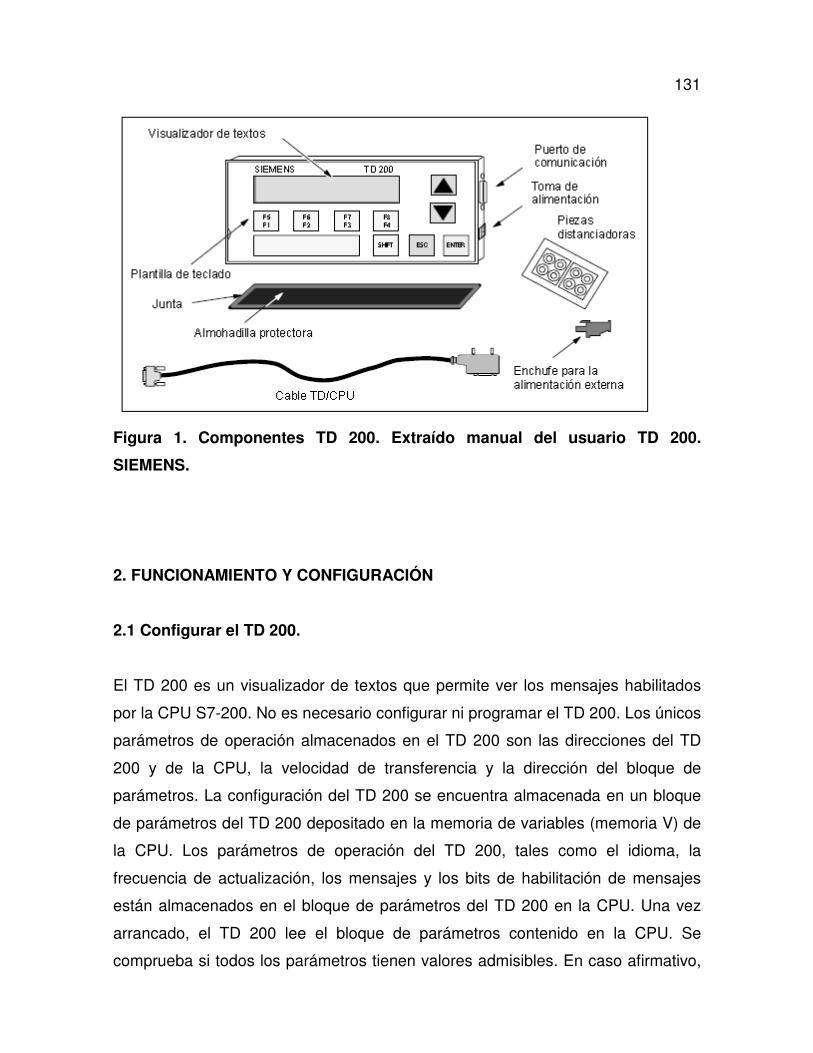
131
Figura 1. Componentes TD 200. Extraído manual del usuario TD 200.
SIEMENS.
2. FUNCIONAMIENTO Y CONFIGURACIÓN
2.1 Configurar el TD 200.
El TD 200 es un visualizador de textos que permite ver los mensajes habilitados
por la CPU S7-200. No es necesario configurar ni programar el TD 200. Los únicos
parámetros de operación almacenados en el TD 200 son las direcciones del TD
200 y de la CPU, la velocidad de transferencia y la dirección del bloque de
parámetros. La configuración del TD 200 se encuentra almacenada en un bloque
de parámetros del TD 200 depositado en la memoria de variables (memoria V) de
la CPU. Los parámetros de operación del TD 200, tales como el idioma, la
frecuencia de actualización, los mensajes y los bits de habilitación de mensajes
están almacenados en el bloque de parámetros del TD 200 en la CPU. Una vez
arrancado, el TD 200 lee el bloque de parámetros contenido en la CPU. Se
comprueba si todos los parámetros tienen valores admisibles. En caso afirmativo,
132 el TD 200 comienza a consultar los bits de habilitación de mensajes para
determinar qué mensaje se debe visualizar. Luego lee el mensaje de la CPU y lo
visualiza. El software descrito es la versión 3.1 de STEP 7-Micro/WIN. Es posible
que el aspecto y el funcionamiento de las versiones anteriores del software sean
diferentes.
2.2 Arrancar el Asistente de configuración del TD 200 en STEP 7-Micro/
WIN.
STEP 7-Micro/WIN incorpora un Asistente que permite configurar fácilmente el
bloque de parámetros y los mensajes en el área de datos de la memoria de la
CPU S7-200. El Asistente de configuración del TD 200 escribe automáticamente el
bloque de parámetros y los textos de los mensajes en el editor de bloques de
datos, tras elegirse las opciones y crearse los mensajes. Dicho bloque de datos se
puede cargar entonces en la CPU.
En el presente anexo se describe cómo crear una aplicación para el TD 200.
Con las instrucciones del presente anexo es posible crear un bloque de
parámetros y tres mensajes para el TD 200, utilizando el Asistente de
configuración del TD 200. El primer mensaje contiene sólo texto. El segundo
mensaje contiene tanto texto como valores asociados. El tercer mensaje es un
texto que debe ser confirmado por el operador.
En el ejemplo se muestra también cómo utilizar las teclas de función para habilitar
un mensaje y cómo emplear los bits de confirmación y de aviso de edición en el
programa. Para abrir el Asistente, elija el comando Herramientas > Asistente TD
200... Como muestra la figura 2.
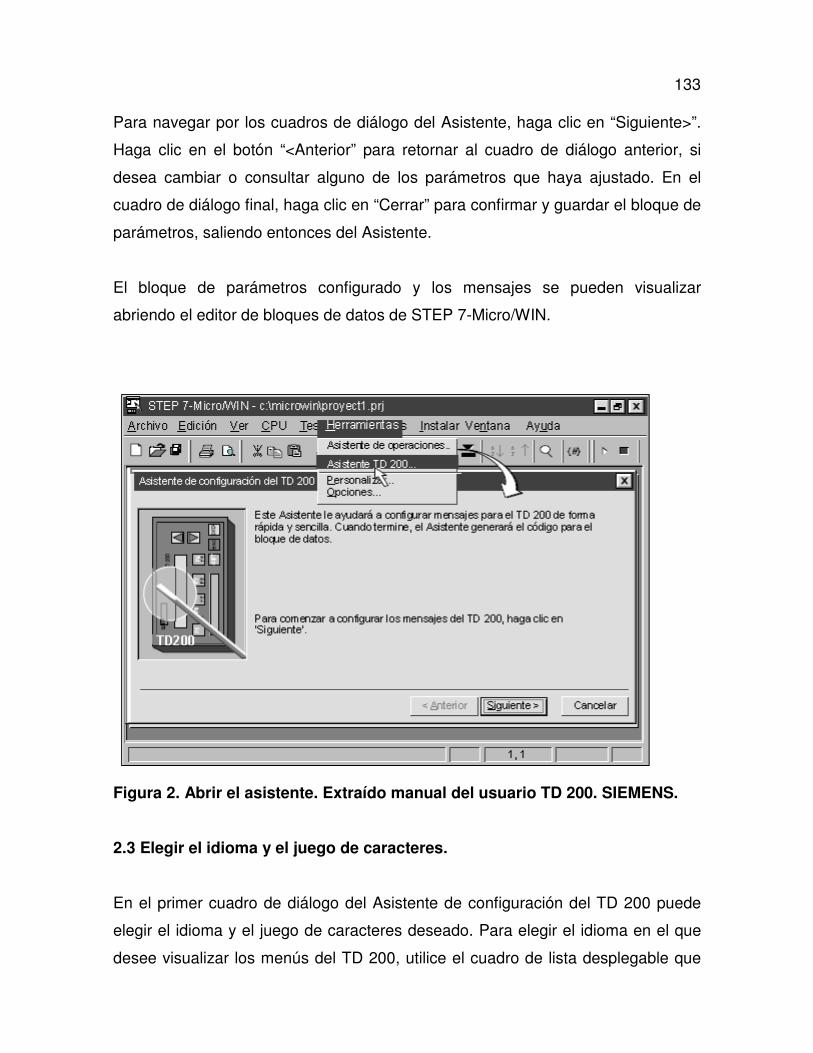
133 Para navegar por los cuadros de diálogo del Asistente, haga clic en “Siguiente>”.
Haga clic en el botón “<Anterior” para retornar al cuadro de diálogo anterior, si
desea cambiar o consultar alguno de los parámetros que haya ajustado. En el
cuadro de diálogo final, haga clic en “Cerrar” para confirmar y guardar el bloque de
parámetros, saliendo entonces del Asistente.
El bloque de parámetros configurado y los mensajes se pueden visualizar
abriendo el editor de bloques de datos de STEP 7-Micro/WIN.
Figura 2. Abrir el asistente. Extraído manual del usuario TD 200. SIEMENS.
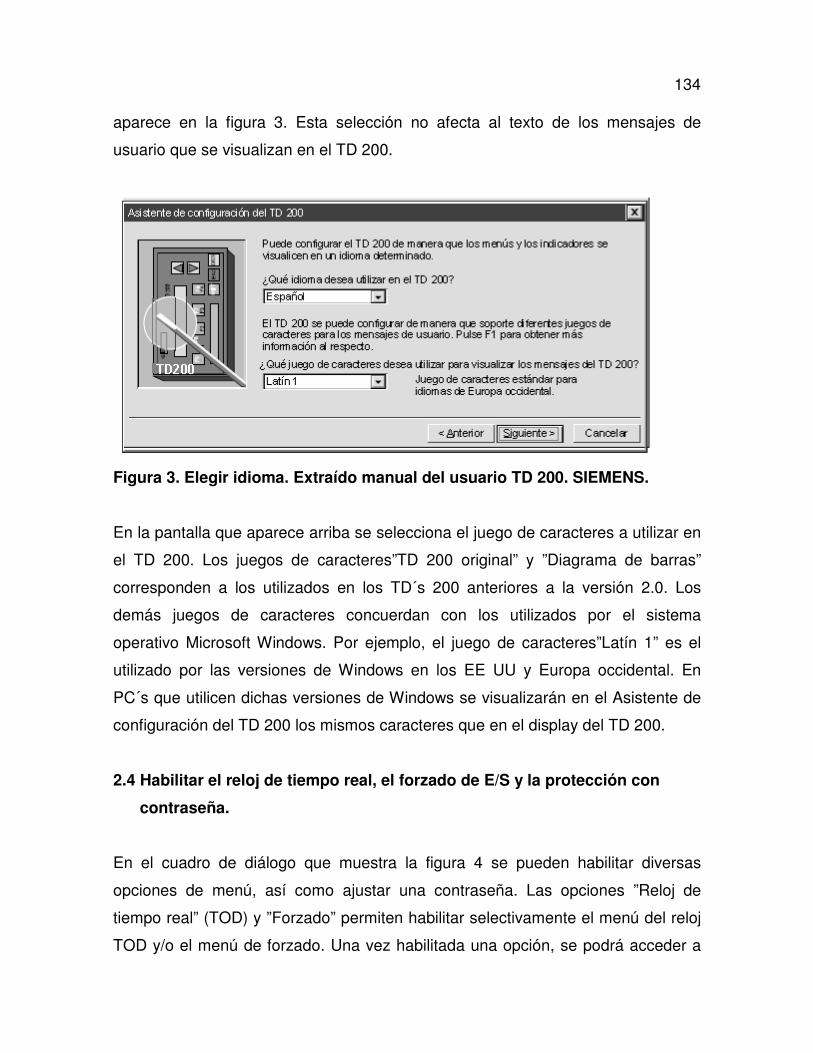
2.3 Elegir el idioma y el juego de caracteres.
En el primer cuadro de diálogo del Asistente de configuración del TD 200 puede
elegir el idioma y el juego de caracteres deseado. Para elegir el idioma en el que
desee visualizar los menús del TD 200, utilice el cuadro de lista desplegable que
134 aparece en la figura 3. Esta selección no afecta al texto de los mensajes de
usuario que se visualizan en el TD 200.
Figura 3. Elegir idioma. Extraído manual del usuario TD 200. SIEMENS.
En la pantalla que aparece arriba se selecciona el juego de caracteres a utilizar en
el TD 200. Los juegos de caracteres”TD 200 original” y ”Diagrama de barras”
corresponden a los utilizados en los TD´s 200 anteriores a la versión 2.0. Los
demás juegos de caracteres concuerdan con los utilizados por el sistema
operativo Microsoft Windows. Por ejemplo, el juego de caracteres”Latín 1” es el
utilizado por las versiones de Windows en los EE UU y Europa occidental. En
PC´s que utilicen dichas versiones de Windows se visualizarán en el Asistente de
configuración del TD 200 los mismos caracteres que en el display del TD 200.
2.4 Habilitar el reloj de tiempo real, el forzado de E/S y la protección con
contraseña.
En el cuadro de diálogo que muestra la figura 4 se pueden habilitar diversas
opciones de menú, así como ajustar una contraseña. Las opciones ”Reloj de
tiempo real” (TOD) y ”Forzado” permiten habilitar selectivamente el menú del reloj
TOD y/o el menú de forzado. Una vez habilitada una opción, se podrá acceder a
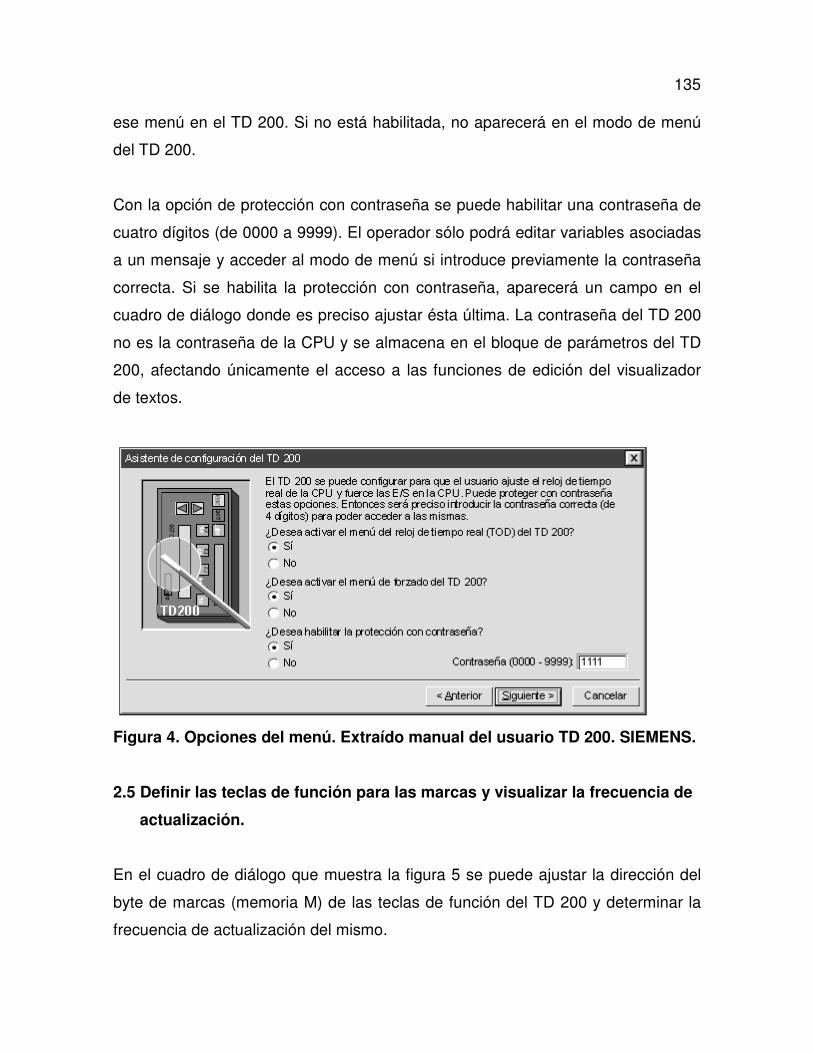
135 ese menú en el TD 200. Si no está habilitada, no aparecerá en el modo de menú
del TD 200.
Con la opción de protección con contraseña se puede habilitar una contraseña de
cuatro dígitos (de 0000 a 9999). El operador sólo podrá editar variables asociadas
a un mensaje y acceder al modo de menú si introduce previamente la contraseña
correcta. Si se habilita la protección con contraseña, aparecerá un campo en el
cuadro de diálogo donde es preciso ajustar ésta última. La contraseña del TD 200
no es la contraseña de la CPU y se almacena en el bloque de parámetros del TD
200, afectando únicamente el acceso a las funciones de edición del visualizador
de textos.
Figura 4. Opciones del menú. Extraído manual del usuario TD 200. SIEMENS.
2.5 Definir las teclas de función para las marcas y visualizar la frecuencia de
actualización.
En el cuadro de diálogo que muestra la figura 5 se puede ajustar la dirección del
byte de marcas (memoria M) de las teclas de función del TD 200 y determinar la
frecuencia de actualización del mismo.
136 Es preciso reservar ocho marcas (M) para el TD 200, que se activarán cuando se
pulse una tecla de función. El programa de usuario puede supervisar dichas
marcas y ejecutar una acción cuando se pulse una tecla determinada. El TD 200
activa una marca cada vez que se pulsa la correspondiente tecla de función.
Siempre es necesario reservar una dirección en el área de marcas, aunque el
programa de usuario no utilice las teclas de función. Las direcciones válidas para
las diferentes CPU´s se indican en el Manual del sistema de automatización
SIMATIC S7-200.
Precaución
El TD 200 activa una marca cada vez que se pulsa una tecla de función. Si no se
tiene previsto utilizar las teclas de función y, por tanto, no se les asigna una
dirección en el área de marcas, el TD 200 utilizará el byte M0 como ajuste
estándar para dichas teclas.
Si el programa utiliza marcas en M0 y un usuario pulsa alguna tecla de función, el
TD 200 activará la marca correspondiente en M0, sobrescribiendo el valor
asignado a esa marca en el programa de usuario. Si se efectúan cambios
inadvertidos en las marcas, puede suceder que el programa se ejecute de forma
inesperada. El funcionamiento impredecible del sistema de automatización puede
causar la muerte o heridas graves al personal y/o daños materiales. Siempre es
necesario reservar una dirección en el área de marcas, aun cuando el programa
de usuario no utilice las teclas de función.
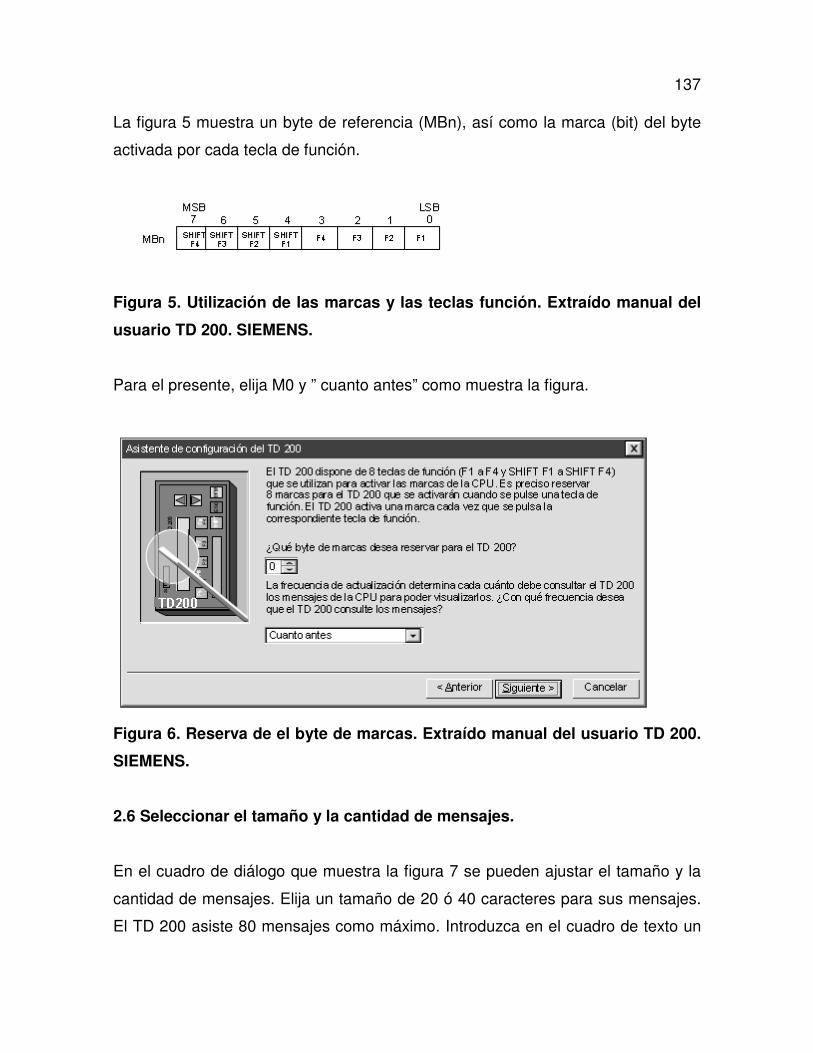
137 La figura 5 muestra un byte de referencia (MBn), así como la marca (bit) del byte
activada por cada tecla de función.
Figura 5. Utilización de las marcas y las teclas función. Extraído manual del
usuario TD 200. SIEMENS.
Para el presente, elija M0 y ” cuanto antes” como muestra la figura.
Figura 6. Reserva de el byte de marcas. Extraído manual del usuario TD 200.
SIEMENS.
2.6 Seleccionar el tamaño y la cantidad de mensajes.
En el cuadro de diálogo que muestra la figura 7 se pueden ajustar el tamaño y la
cantidad de mensajes. Elija un tamaño de 20 ó 40 caracteres para sus mensajes.
El TD 200 asiste 80 mensajes como máximo. Introduzca en el cuadro de texto un
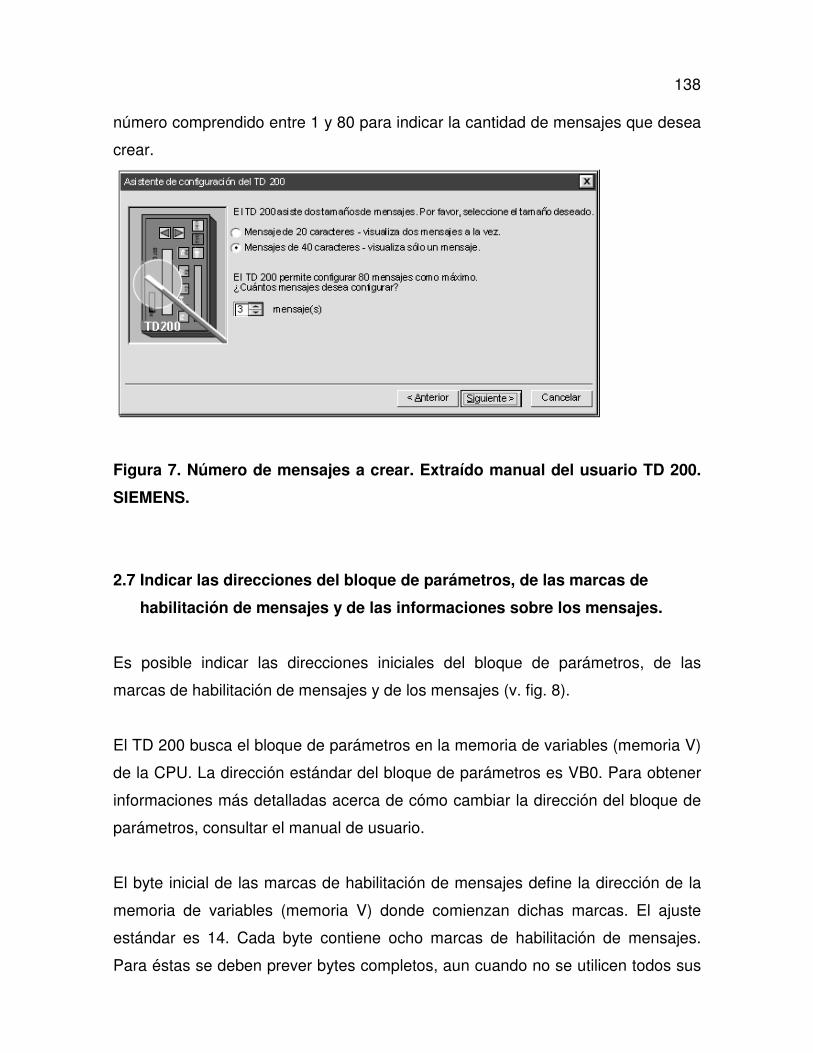
138 número comprendido entre 1 y 80 para indicar la cantidad de mensajes que desea
crear.
Figura 7. Número de mensajes a crear. Extraído manual del usuario TD 200.
SIEMENS.
2.7 Indicar las direcciones del bloque de parámetros, de las marcas de
habilitación de mensajes y de las informaciones sobre los mensajes.
Es posible indicar las direcciones iniciales del bloque de parámetros, de las
marcas de habilitación de mensajes y de los mensajes (v. fig. 8).
El TD 200 busca el bloque de parámetros en la memoria de variables (memoria V)
de la CPU. La dirección estándar del bloque de parámetros es VB0. Para obtener
informaciones más detalladas acerca de cómo cambiar la dirección del bloque de
parámetros, consultar el manual de usuario.
El byte inicial de las marcas de habilitación de mensajes define la dirección de la
memoria de variables (memoria V) donde comienzan dichas marcas. El ajuste
estándar es 14. Cada byte contiene ocho marcas de habilitación de mensajes.
Para éstas se deben prever bytes completos, aun cuando no se utilicen todos sus
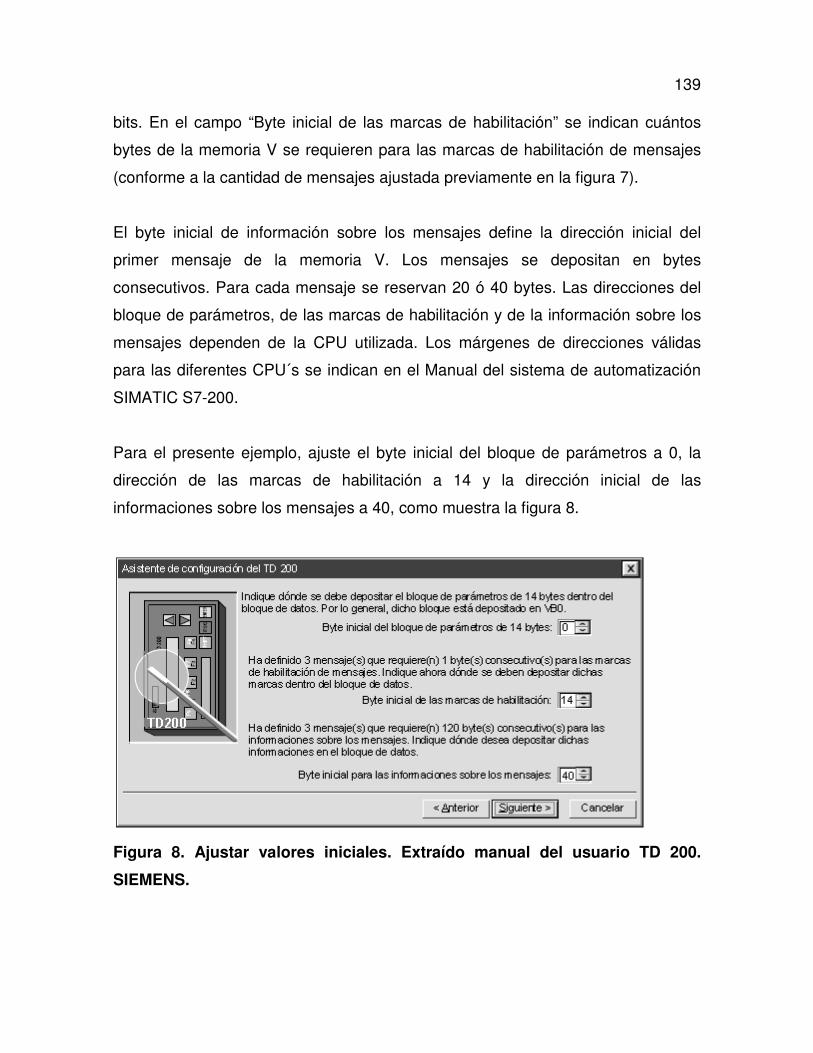
139 bits. En el campo “Byte inicial de las marcas de habilitación” se indican cuántos
bytes de la memoria V se requieren para las marcas de habilitación de mensajes
(conforme a la cantidad de mensajes ajustada previamente en la figura 7).
El byte inicial de información sobre los mensajes define la dirección inicial del
primer mensaje de la memoria V. Los mensajes se depositan en bytes
consecutivos. Para cada mensaje se reservan 20 ó 40 bytes. Las direcciones del
bloque de parámetros, de las marcas de habilitación y de la información sobre los
mensajes dependen de la CPU utilizada. Los márgenes de direcciones válidas
para las diferentes CPU´s se indican en el Manual del sistema de automatización
SIMATIC S7-200.
Para el presente ejemplo, ajuste el byte inicial del bloque de parámetros a 0, la
dirección de las marcas de habilitación a 14 y la dirección inicial de las
informaciones sobre los mensajes a 40, como muestra la figura 8.
Figura 8. Ajustar valores iniciales. Extraído manual del usuario TD 200.
SIEMENS.
140 2.8 Crear mensajes de sólo texto.
En el cuadro de diálogo que muestra la figura 9 se puede introducir el texto para
un mensaje del TD 200. Allí se indica también la dirección inicial del mensaje.
Además, aparece la dirección del bit de habilitación del mismo. El programa utiliza
dicho bit para controlar la visualización del mensaje en el TD 200. Cuando se pone
a 1 (se activa) ese bit, el TD 200 lee y visualiza dicho mensaje.
Para el presente ejemplo, introduzca el mensaje como muestra la figura 9. Este es
un mensaje de sólo texto, por lo que no contiene valores asociados. Puesto que
en el ejemplo se deben configurar dos mensajes más, haga clic en el botón
“Mensaje siguiente >” para continuar.
Figura 9. Introducir mensajes. Extraído manual del usuario TD 200. SIEMENS.
2.9 Asociar valores de datos a un mensaje de texto.
Un valor de datos se puede asociar a un mensaje para visualizarlo en el TD 200. A
fin de visualizar un valor de datos es preciso reservar en el mensaje suficiente
141 espacio para el valor de datos y la información relativa al formato. Esta última le
indica al TD 200 cómo visualizar y editar el valor de datos. Para dicha información
se necesita el espacio que ocuparían dos caracteres en el mensaje. Los valores
de palabra requieren un espacio de dos caracteres además de la información
relativa al formato (es decir, cuatro caracteres en total). Las palabras dobles y los
valores reales (en coma flotante) exigen un espacio de cuatro caracteres además
de la información relativa al formato (seis caracteres en total).
Al insertar un valor de datos en un mensaje, es preciso comprobar si se dispone
de suficientes caracteres para la información relativa al formato y para los valores
asociados en la línea actual del visualizador. Por ejemplo, si se inserta un valor de
palabra (dos caracteres para el valor de palabra más dos caracteres para la
información relativa al formato), se deben prever por lo menos cuatro espacios
entre la posición inicial del valor asociado y el fin de la línea actual del mensaje. El
carácter que aparece en el extremo derecho de un valor asociado sirve como
punto de anclaje para dicho valor en el display del TD 200. Los valores de datos
se justifican siempre a la derecha del punto de anclaje en los mensajes que se
visualizan en el TD 200. Al aumentar el tamaño de un valor de datos, éste utiliza
más espacios a la izquierda del punto de anclaje y puede comenzar a usar los
espacios ocupados por el texto del mensaje. Prevea suficiente espacio entre el
final del texto y el punto de anclaje para el margen esperado del valor de datos. La
cantidad de caracteres utilizados para visualizar un valor varía en función del
tamaño del mismo. Dicha cantidad necesaria para visualizar un número difiere de
los caracteres utilizados para depositar el valor asociado en el mensaje. La
cantidad de caracteres necesaria para la visualización depende del margen de
valores de ese número en una aplicación específica.
El TD 200 visualiza todos los valores como números decimales. Los valores
positivos con signo se visualizan sin signo alguno. Los valores negativos con signo
se visualizan precedidos de un”-”. Los valores sin signo se visualizan sin signo
alguno. Todos los números fraccionarios van precedidos de un”0” (p.ej. 0,5). Los
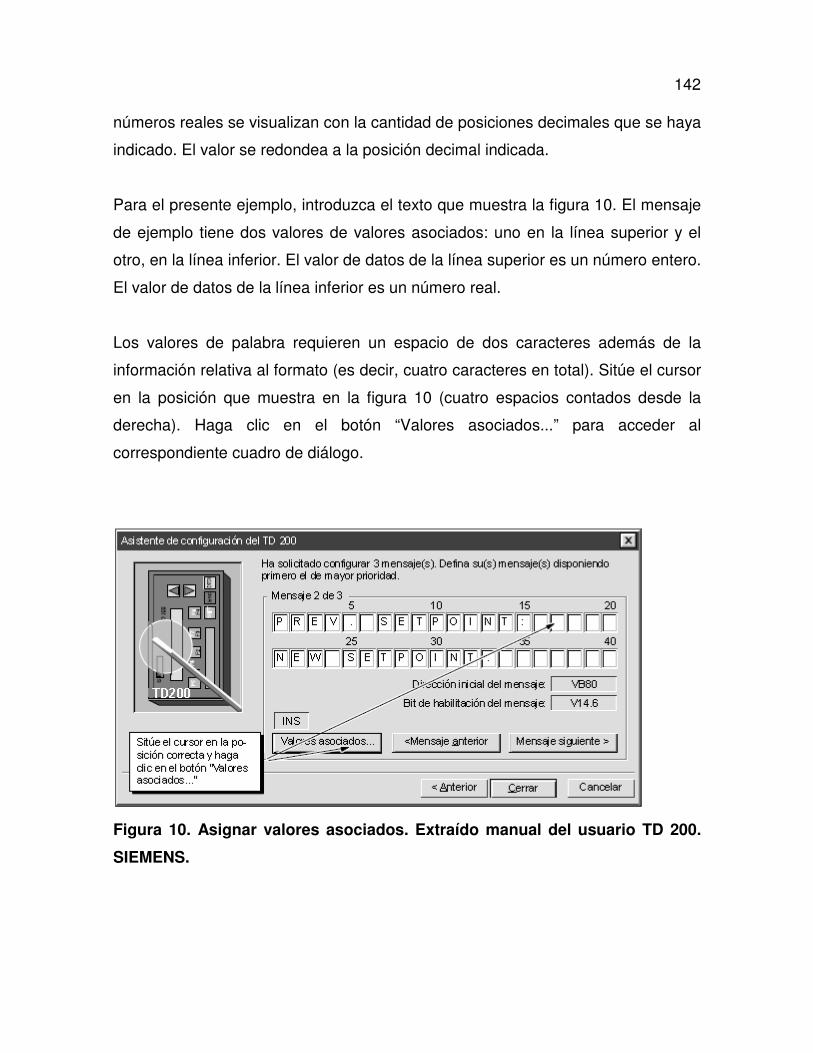
142 números reales se visualizan con la cantidad de posiciones decimales que se haya
indicado. El valor se redondea a la posición decimal indicada.
Para el presente ejemplo, introduzca el texto que muestra la figura 10. El mensaje
de ejemplo tiene dos valores de valores asociados: uno en la línea superior y el
otro, en la línea inferior. El valor de datos de la línea superior es un número entero.
El valor de datos de la línea inferior es un número real.
Los valores de palabra requieren un espacio de dos caracteres además de la
información relativa al formato (es decir, cuatro caracteres en total). Sitúe el cursor
en la posición que muestra en la figura 10 (cuatro espacios contados desde la
derecha). Haga clic en el botón “Valores asociados...” para acceder al
correspondiente cuadro de diálogo.
Figura 10. Asignar valores asociados. Extraído manual del usuario TD 200.
SIEMENS.
143 2.10 Formatear el valor asociado.
La figura 11 muestra el cuadro de diálogo ”Valores asociados”. Allí se puede
indicar el tipo de datos, el formato y las características de visualización de un valor
asociado. También es posible seleccionar si el mensaje se debe confirmar, si el
valor de datos se puede editar y si se requiere una contraseña. Algunas opciones
dependen de las selecciones hechas y no aparecen en el momento de abrir el
cuadro de diálogo. La selección del formato de datos define el tamaño del valor
asociado en el mensaje:
• Seleccione “Ninguno” si se debe confirmar un mensaje, pero no hay un valor
asociado a visualizar en el TD 200.
• Seleccione “Palabra“ si el valor asociado es un número entero. Un valor de
palabra o de número entero requiere un espacio de dos caracteres en el mensaje
para depositar allí el valor de datos.
• Seleccione “Palabra doble” si el valor asociado es una palabra doble o un
número real (en coma flotante). Un valor de palabra doble o de número real
requiere un espacio de cuatro caracteres en el mensaje para depositar allí el valor
de datos.
La selección del formato de visualización le indica al TD 200 si el valor de datos
lleva signo o no. El TD 200 utiliza esta información para editar el valor de datos.
Los valores con signo pueden ser números positivos o negativos. Los valores sin
signo se utilizan únicamente para los números positivos. La selección de dígitos a
la derecha del punto decimal permite escalar la visualización del valor de datos. Si
éste último es un número entero, el valor a visualizar se puede escalar indicando
la posición del punto decimal. Por ejemplo, si el valor de datos es igual a 123 y se
elige 1 dígito a la derecha del punto decimal, el TD 200 visualiza 12.3.
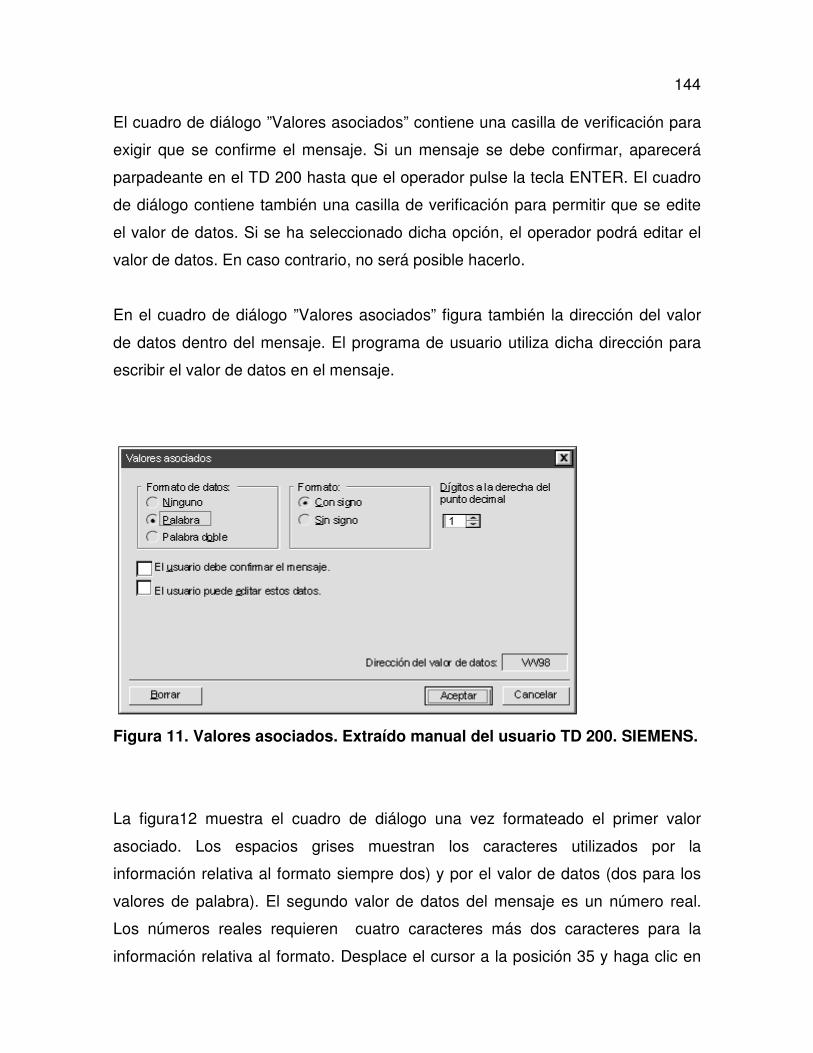
144 El cuadro de diálogo ”Valores asociados” contiene una casilla de verificación para
exigir que se confirme el mensaje. Si un mensaje se debe confirmar, aparecerá
parpadeante en el TD 200 hasta que el operador pulse la tecla ENTER. El cuadro
de diálogo contiene también una casilla de verificación para permitir que se edite
el valor de datos. Si se ha seleccionado dicha opción, el operador podrá editar el
valor de datos. En caso contrario, no será posible hacerlo.
En el cuadro de diálogo ”Valores asociados” figura también la dirección del valor
de datos dentro del mensaje. El programa de usuario utiliza dicha dirección para
escribir el valor de datos en el mensaje.
Figura 11. Valores asociados. Extraído manual del usuario TD 200. SIEMENS.
La figura12 muestra el cuadro de diálogo una vez formateado el primer valor
asociado. Los espacios grises muestran los caracteres utilizados por la
información relativa al formato siempre dos) y por el valor de datos (dos para los
valores de palabra). El segundo valor de datos del mensaje es un número real.
Los números reales requieren cuatro caracteres más dos caracteres para la
información relativa al formato. Desplace el cursor a la posición 35 y haga clic en
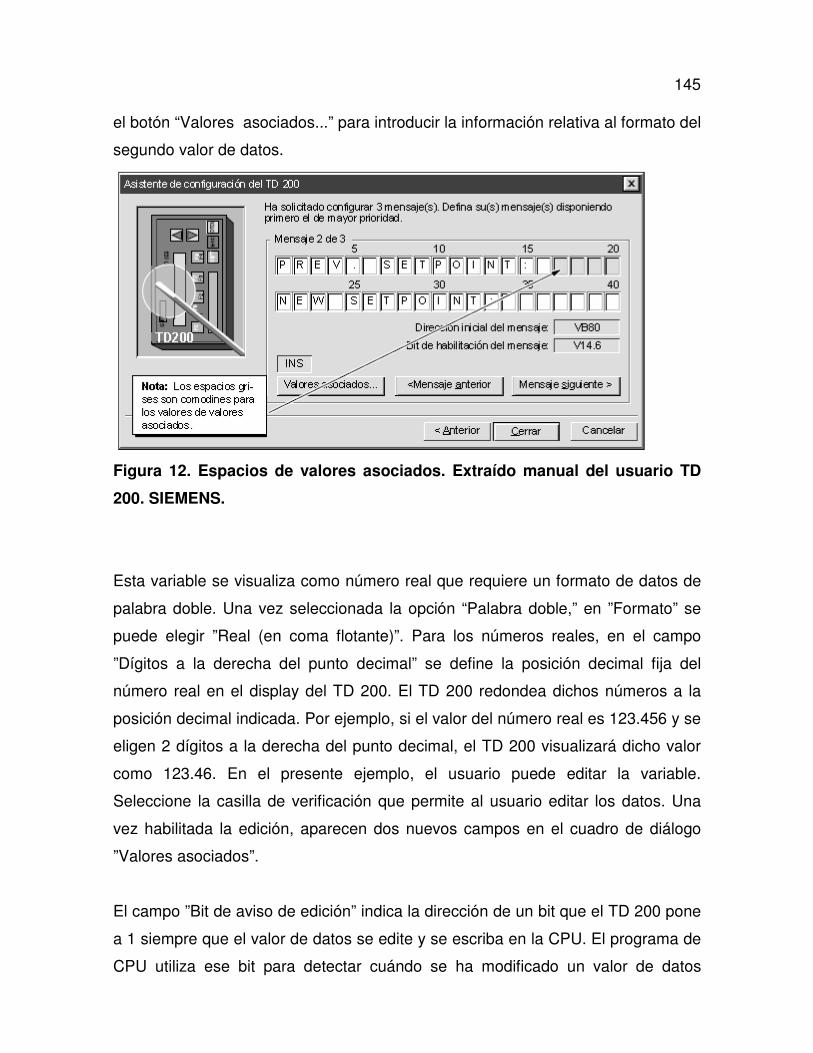
145 el botón “Valores asociados...” para introducir la información relativa al formato del
segundo valor de datos.
Figura 12. Espacios de valores asociados. Extraído manual del usuario TD
200. SIEMENS.
Esta variable se visualiza como número real que requiere un formato de datos de
palabra doble. Una vez seleccionada la opción “Palabra doble,” en ”Formato” se
puede elegir ”Real (en coma flotante)”. Para los números reales, en el campo
”Dígitos a la derecha del punto decimal” se define la posición decimal fija del
número real en el display del TD 200. El TD 200 redondea dichos números a la
posición decimal indicada. Por ejemplo, si el valor del número real es 123.456 y se
eligen 2 dígitos a la derecha del punto decimal, el TD 200 visualizará dicho valor
como 123.46. En el presente ejemplo, el usuario puede editar la variable.
Seleccione la casilla de verificación que permite al usuario editar los datos. Una
vez habilitada la edición, aparecen dos nuevos campos en el cuadro de diálogo
”Valores asociados”.
El campo ”Bit de aviso de edición” indica la dirección de un bit que el TD 200 pone
a 1 siempre que el valor de datos se edite y se escriba en la CPU. El programa de
CPU utiliza ese bit para detectar cuándo se ha modificado un valor de datos
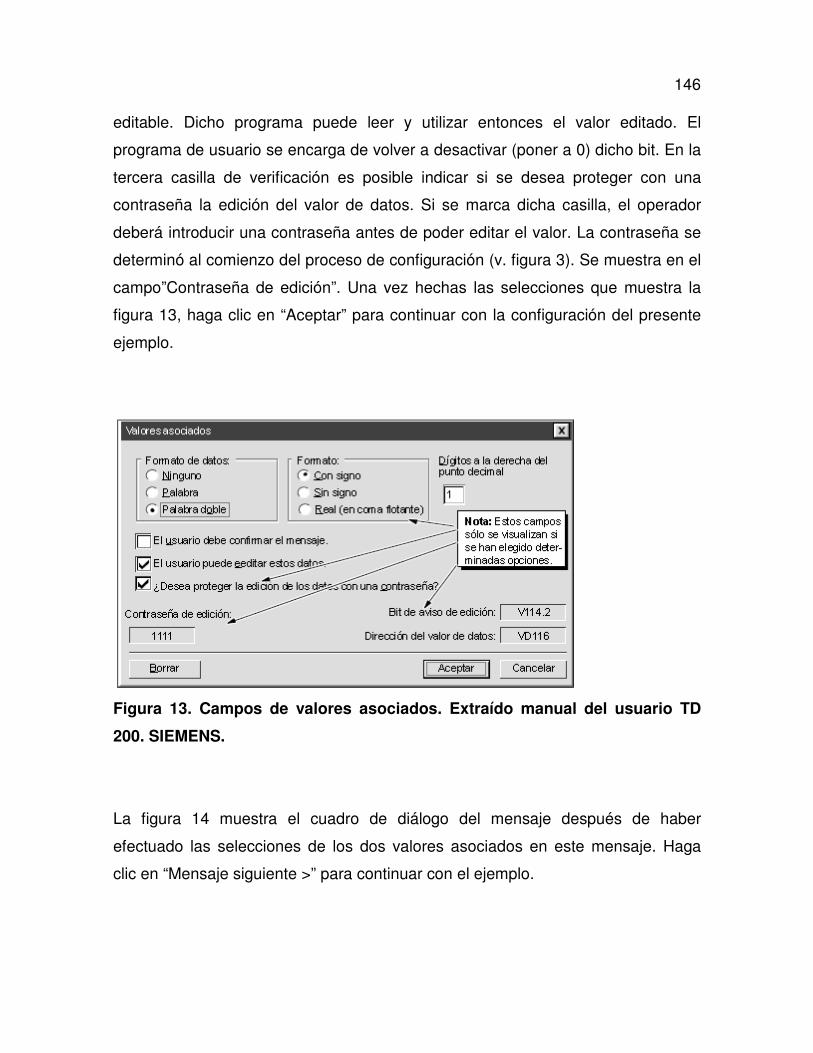
146 editable. Dicho programa puede leer y utilizar entonces el valor editado. El
programa de usuario se encarga de volver a desactivar (poner a 0) dicho bit. En la
tercera casilla de verificación es posible indicar si se desea proteger con una
contraseña la edición del valor de datos. Si se marca dicha casilla, el operador
deberá introducir una contraseña antes de poder editar el valor. La contraseña se
determinó al comienzo del proceso de configuración (v. figura 3). Se muestra en el
campo”Contraseña de edición”. Una vez hechas las selecciones que muestra la
figura 13, haga clic en “Aceptar” para continuar con la configuración del presente
ejemplo.
Figura 13. Campos de valores asociados. Extraído manual del usuario TD
200. SIEMENS.
La figura 14 muestra el cuadro de diálogo del mensaje después de haber
efectuado las selecciones de los dos valores asociados en este mensaje. Haga
clic en “Mensaje siguiente >” para continuar con el ejemplo.
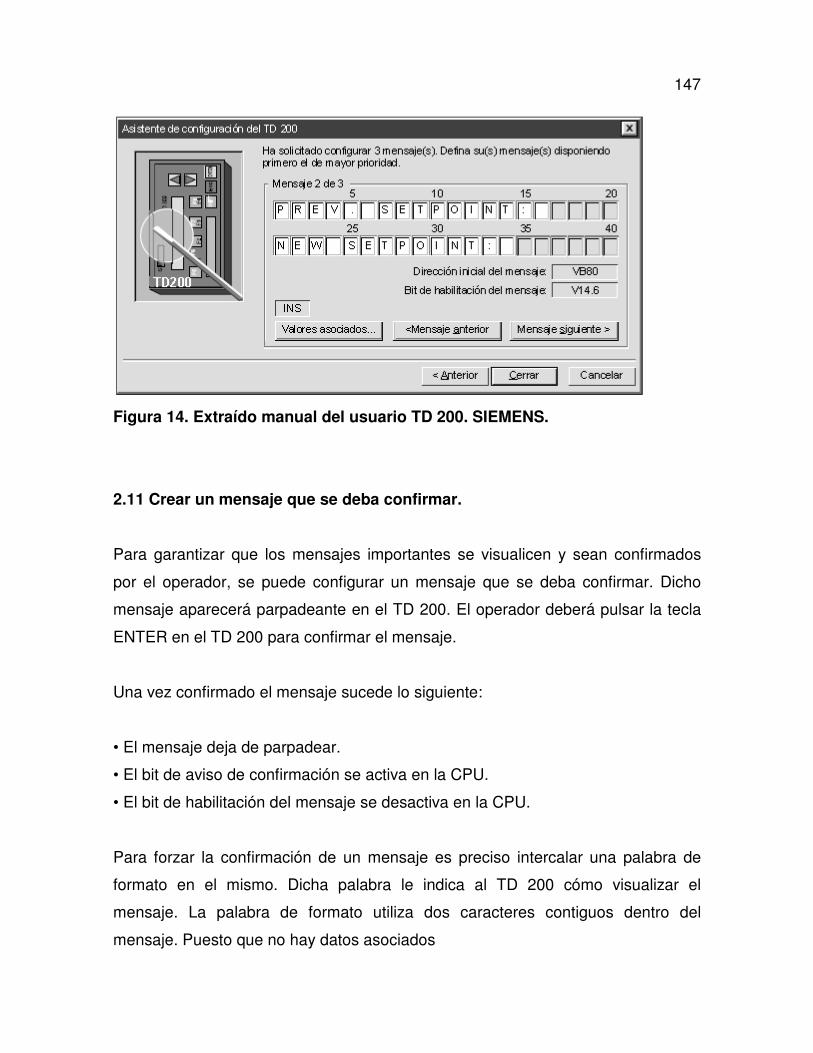
147
Figura 14. Extraído manual del usuario TD 200. SIEMENS.
2.11 Crear un mensaje que se deba confirmar.
Para garantizar que los mensajes importantes se visualicen y sean confirmados
por el operador, se puede configurar un mensaje que se deba confirmar. Dicho
mensaje aparecerá parpadeante en el TD 200. El operador deberá pulsar la tecla
ENTER en el TD 200 para confirmar el mensaje.
Una vez confirmado el mensaje sucede lo siguiente:
• El mensaje deja de parpadear.
• El bit de aviso de confirmación se activa en la CPU.
• El bit de habilitación del mensaje se desactiva en la CPU.
Para forzar la confirmación de un mensaje es preciso intercalar una palabra de
formato en el mismo. Dicha palabra le indica al TD 200 cómo visualizar el
mensaje. La palabra de formato utiliza dos caracteres contiguos dentro del
mensaje. Puesto que no hay datos asociados
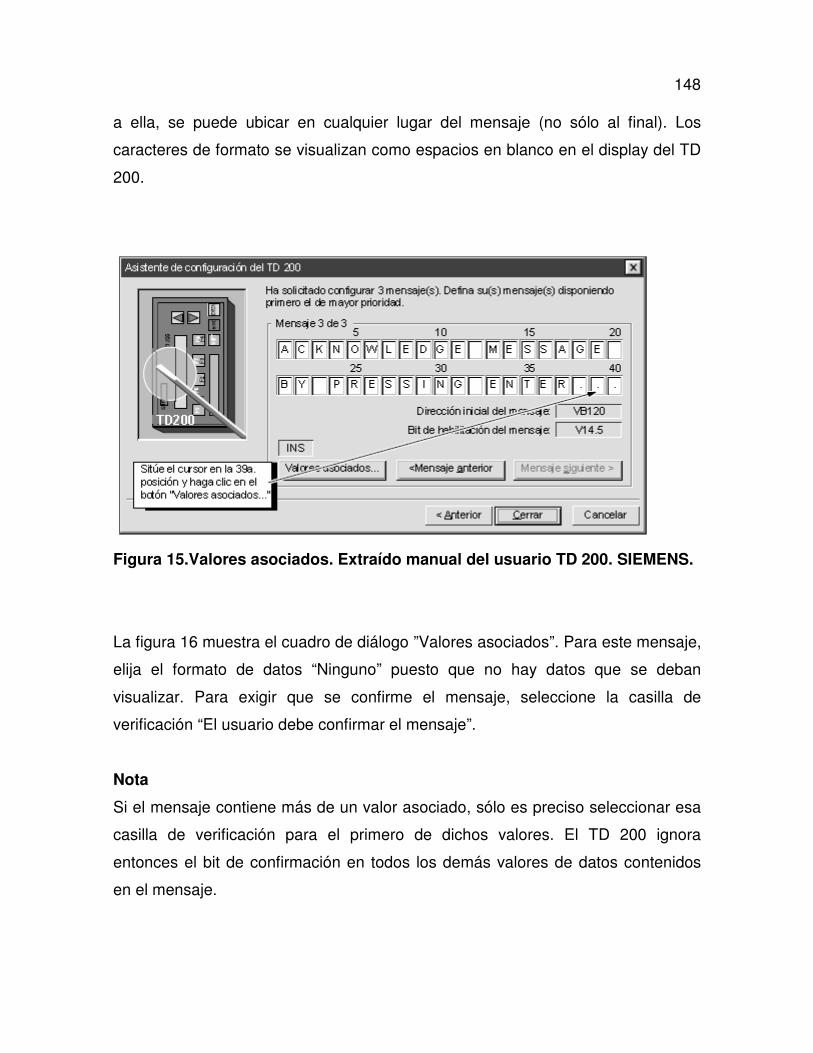
148 a ella, se puede ubicar en cualquier lugar del mensaje (no sólo al final). Los
caracteres de formato se visualizan como espacios en blanco en el display del TD
200.
Figura 15.Valores asociados. Extraído manual del usuario TD 200. SIEMENS.
La figura 16 muestra el cuadro de diálogo ”Valores asociados”. Para este mensaje,
elija el formato de datos “Ninguno” puesto que no hay datos que se deban
visualizar. Para exigir que se confirme el mensaje, seleccione la casilla de
verificación “El usuario debe confirmar el mensaje”.
Nota
Si el mensaje contiene más de un valor asociado, sólo es preciso seleccionar esa
casilla de verificación para el primero de dichos valores. El TD 200 ignora
entonces el bit de confirmación en todos los demás valores de datos contenidos
en el mensaje.
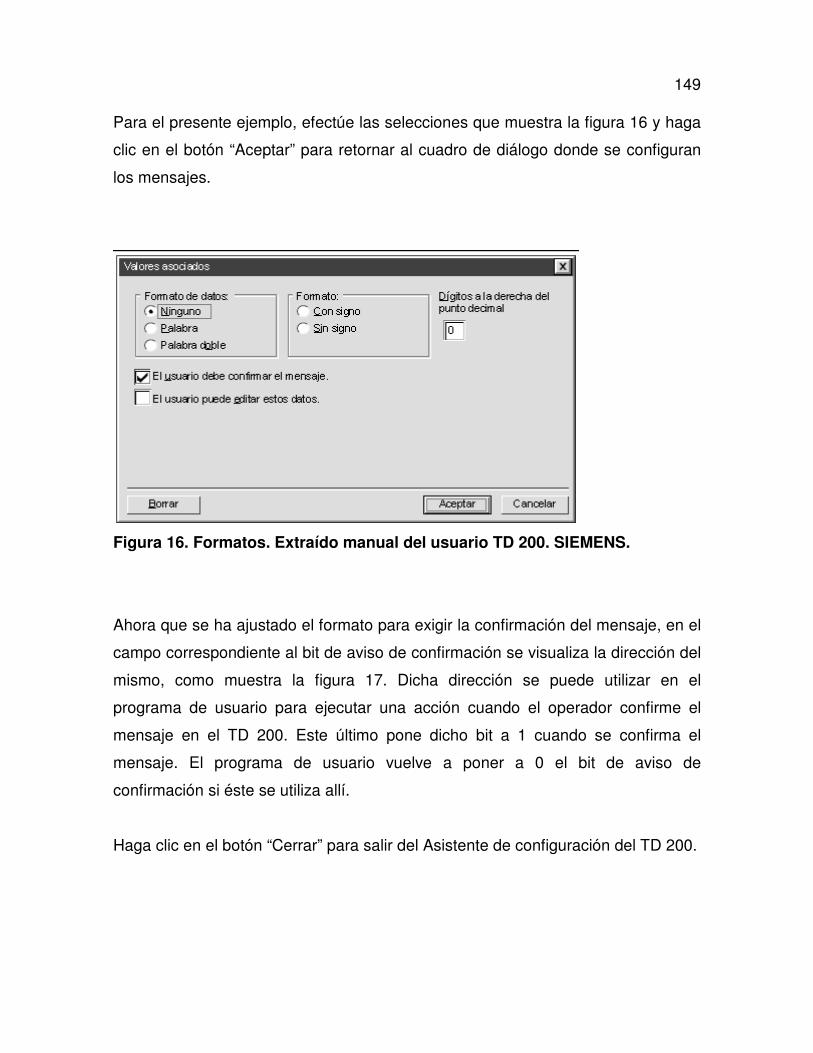
149 Para el presente ejemplo, efectúe las selecciones que muestra la figura 16 y haga
clic en el botón “Aceptar” para retornar al cuadro de diálogo donde se configuran
los mensajes.
Figura 16. Formatos. Extraído manual del usuario TD 200. SIEMENS.
Ahora que se ha ajustado el formato para exigir la confirmación del mensaje, en el
campo correspondiente al bit de aviso de confirmación se visualiza la dirección del
mismo, como muestra la figura 17. Dicha dirección se puede utilizar en el
programa de usuario para ejecutar una acción cuando el operador confirme el
mensaje en el TD 200. Este último pone dicho bit a 1 cuando se confirma el
mensaje. El programa de usuario vuelve a poner a 0 el bit de aviso de
confirmación si éste se utiliza allí.
Haga clic en el botón “Cerrar” para salir del Asistente de configuración del TD 200.
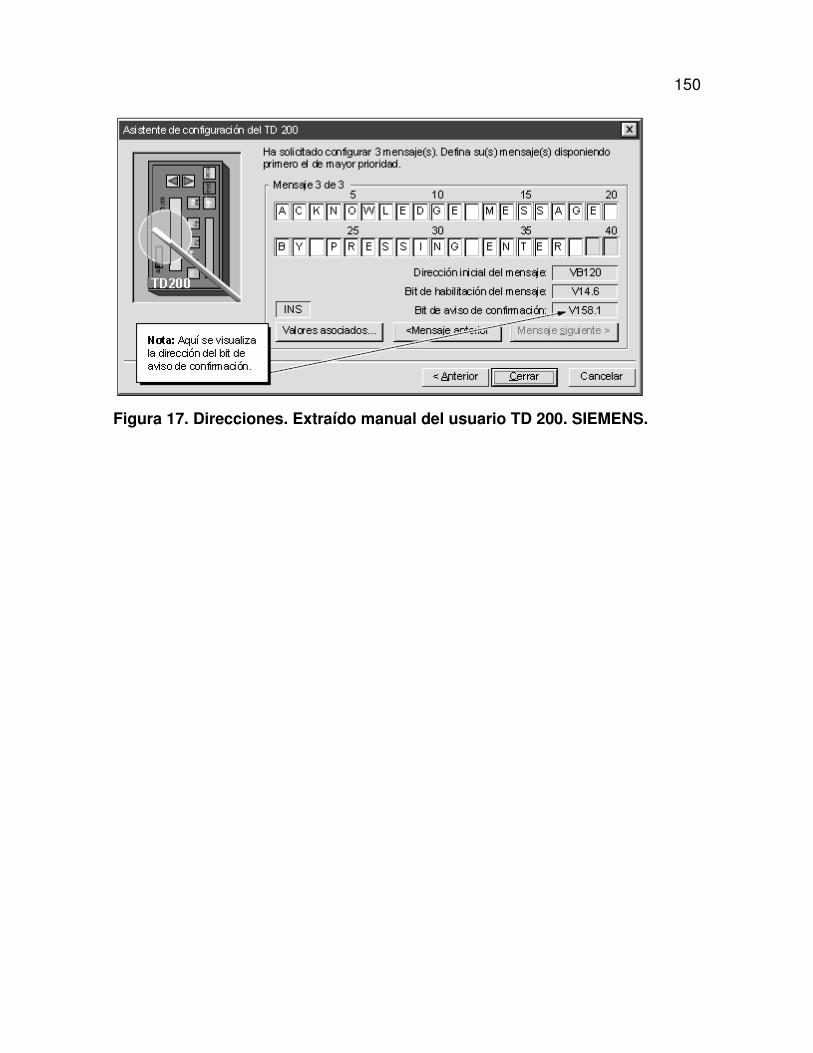
150
Figura 17. Direcciones. Extraído manual del usuario TD 200. SIEMENS.
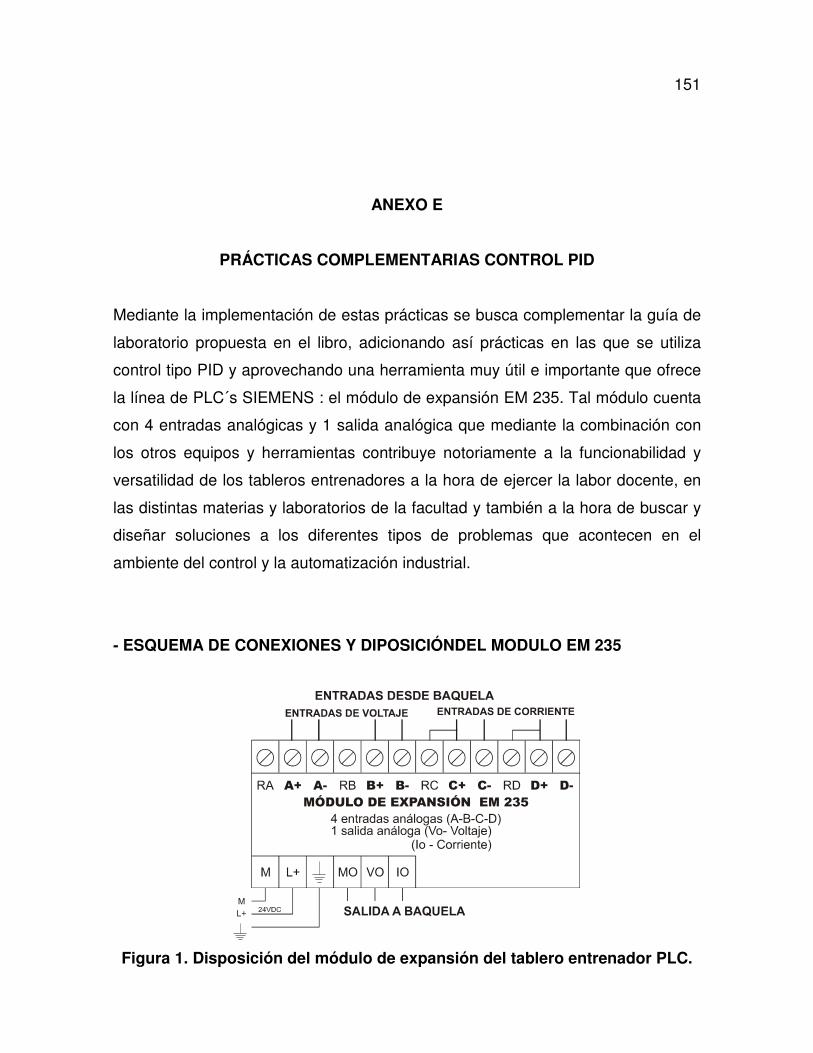
151
ANEXO E
PRÁCTICAS COMPLEMENTARIAS CONTROL PID
Mediante la implementación de estas prácticas se busca complementar la guía de
laboratorio propuesta en el libro, adicionando así prácticas en las que se utiliza
control tipo PID y aprovechando una herramienta muy útil e importante que ofrece
la línea de PLC´s SIEMENS : el módulo de expansión EM 235. Tal módulo cuenta
con 4 entradas analógicas y 1 salida analógica que mediante la combinación con
los otros equipos y herramientas contribuye notoriamente a la funcionabilidad y
versatilidad de los tableros entrenadores a la hora de ejercer la labor docente, en
las distintas materias y laboratorios de la facultad y también a la hora de buscar y
diseñar soluciones a los diferentes tipos de problemas que acontecen en el
ambiente del control y la automatización industrial.
- ESQUEMA DE CONEXIONES Y DIPOSICIÓNDEL MODULO EM 235
Figura 1. Disposición del módulo de expansión del tablero entrenador PLC.
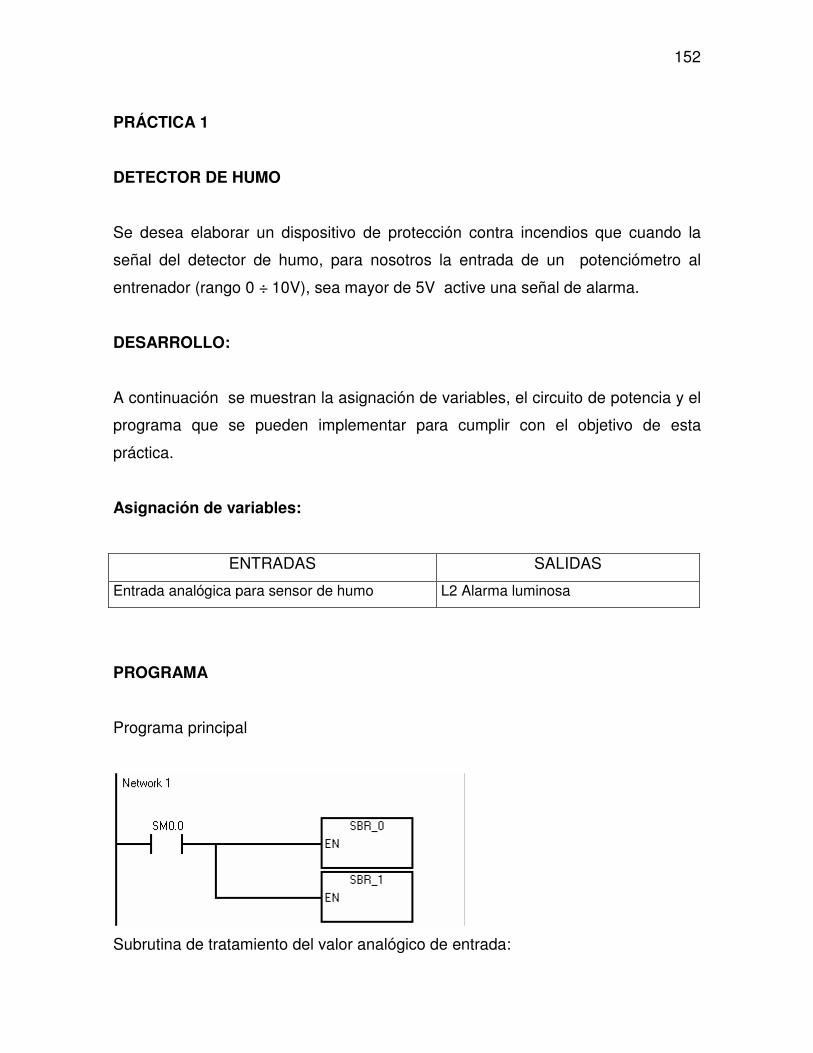
152
PRÁCTICA 1
DETECTOR DE HUMO
Se desea elaborar un dispositivo de protección contra incendios que cuando la
señal del detector de humo, para nosotros la entrada de un potenciómetro al
entrenador (rango 0 ÷ 10V), sea mayor de 5V active una señal de alarma.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
Asignación de variables:
ENTRADAS SALIDAS
Entrada analógica para sensor de humo L2 Alarma luminosa
PROGRAMA
Programa principal
Subrutina de tratamiento del valor analógico de entrada:
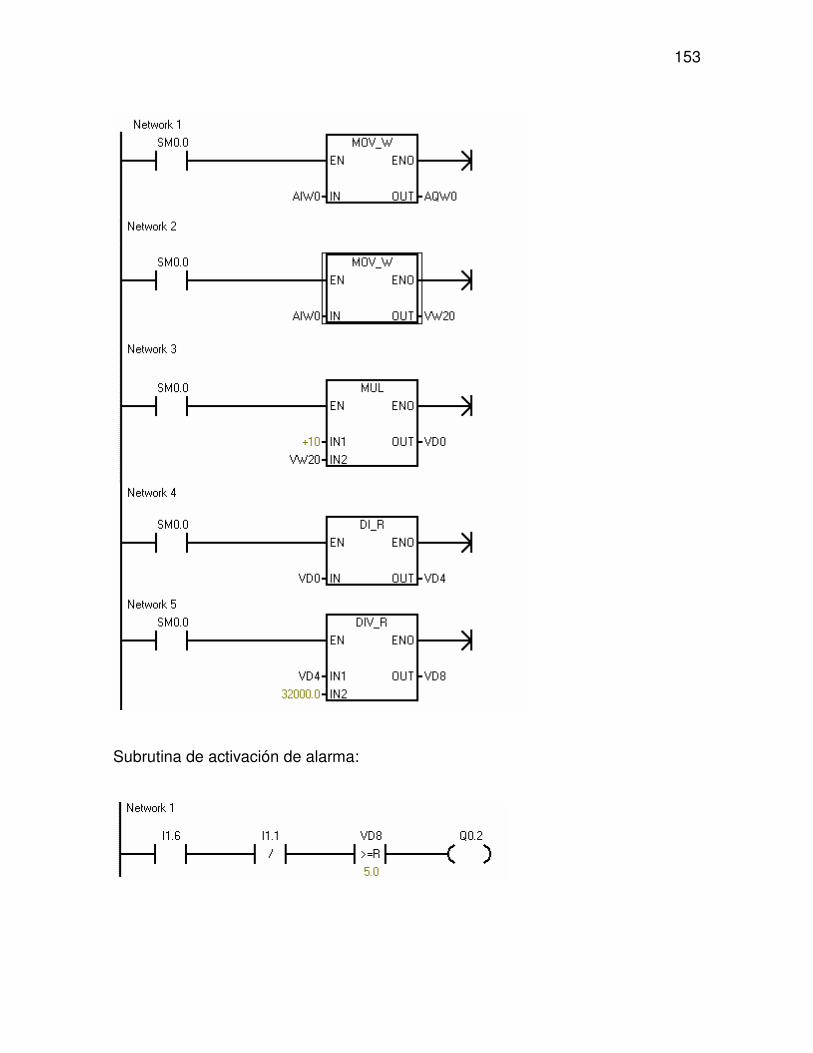
153
Subrutina de activación de alarma:
154
PRACTICA 2
TERMOVENTILADOR
Se pretende controlar el funcionamiento de un termo-ventilador de forma que
responda a las variaciones de temperatura que se produzcan en el local o recinto
donde se instale.
Se debe controlar el funcionamiento de un ventilador accionado mediante motor
trifásico de dos velocidades (existente en el laboratorio de la facultad de Ingeniería
Eléctrica y Electrónica) y el de una resistencia trifásica de caldeo (simulada con el
banco de bombillas del laboratorio).
Las condiciones de funcionamiento serán:
- Cuando la temperatura sea inferior a 18º, el ventilador girará a su velocidad
más rápida y las resistencias suministrarán su potencia calorífica máxima.
- A partir de los 18 º y hasta 21º, le ventilador debe girar a su velocidad lenta
y las resistencias suministrar menos calor.
- Entre 22º y 26º, el ventilador continuará en velocidad lenta pero las
resistencias dejarán de funcionar.
- A partir de 26º, el solo funcionará el ventilador, girando a su velocidad
mayor.
La tabla siguiente resume los cuatro posibles modos de funcionamiento del
automatismo:
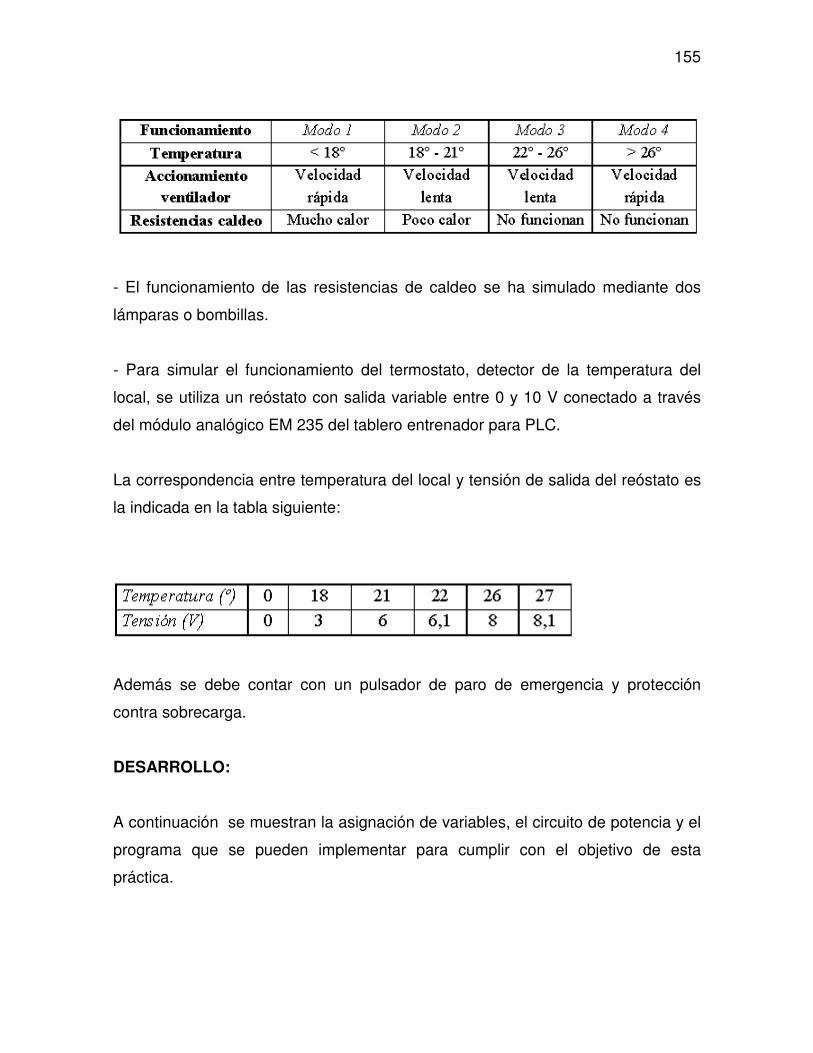
155
- El funcionamiento de las resistencias de caldeo se ha simulado mediante dos
lámparas o bombillas.
- Para simular el funcionamiento del termostato, detector de la temperatura del
local, se utiliza un reóstato con salida variable entre 0 y 10 V conectado a través
del módulo analógico EM 235 del tablero entrenador para PLC.
La correspondencia entre temperatura del local y tensión de salida del reóstato es
la indicada en la tabla siguiente:
Además se debe contar con un pulsador de paro de emergencia y protección
contra sobrecarga.
DESARROLLO:
A continuación se muestran la asignación de variables, el circuito de potencia y el
programa que se pueden implementar para cumplir con el objetivo de esta
práctica.
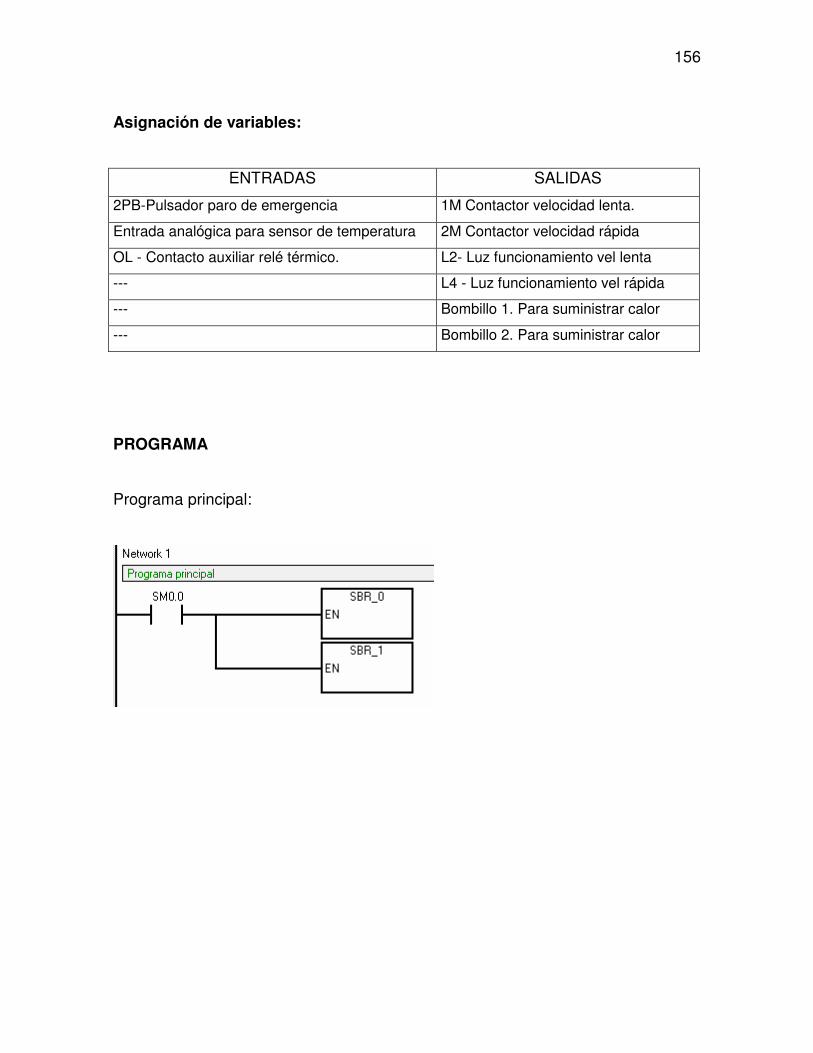
156
Asignación de variables:
ENTRADAS SALIDAS
2PB-Pulsador paro de emergencia 1M Contactor velocidad lenta.
Entrada analógica para sensor de temperatura 2M Contactor velocidad rápida
OL - Contacto auxiliar relé térmico. L2- Luz funcionamiento vel lenta
--- L4 - Luz funcionamiento vel rápida
--- Bombillo 1. Para suministrar calor
--- Bombillo 2. Para suministrar calor
PROGRAMA
Programa principal:
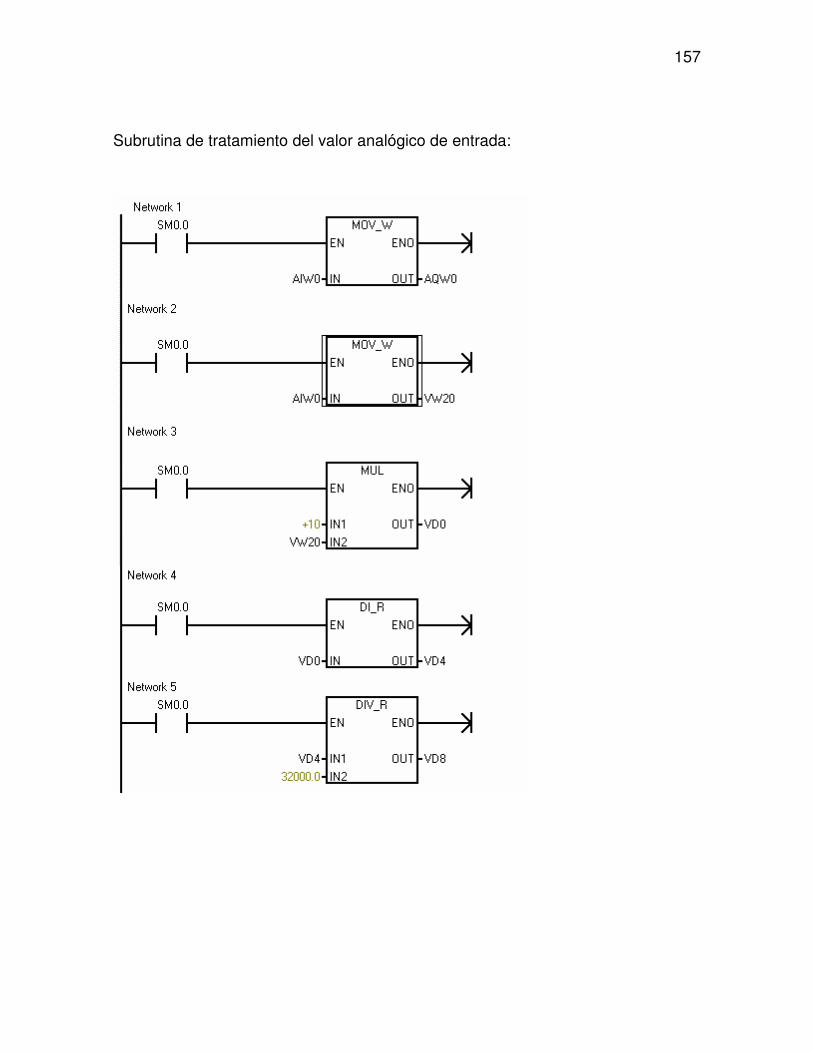
157
Subrutina de tratamiento del valor analógico de entrada:
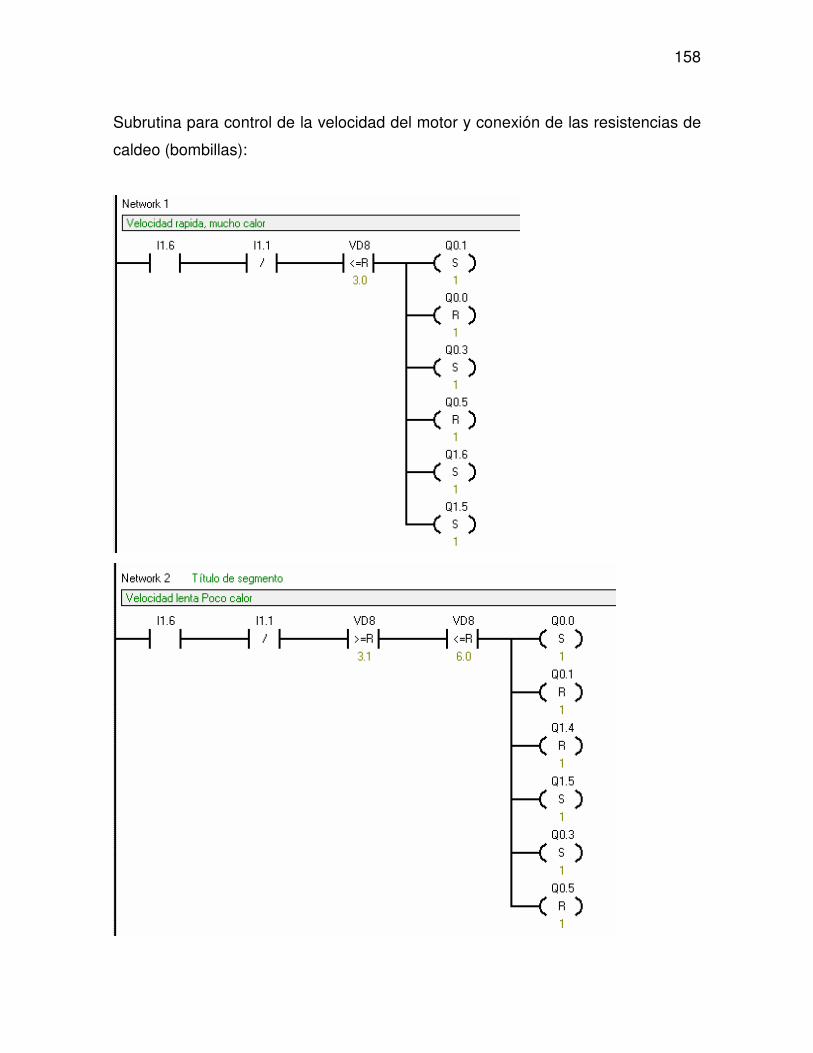
158
Subrutina para control de la velocidad del motor y conexión de las resistencias de
caldeo (bombillas):
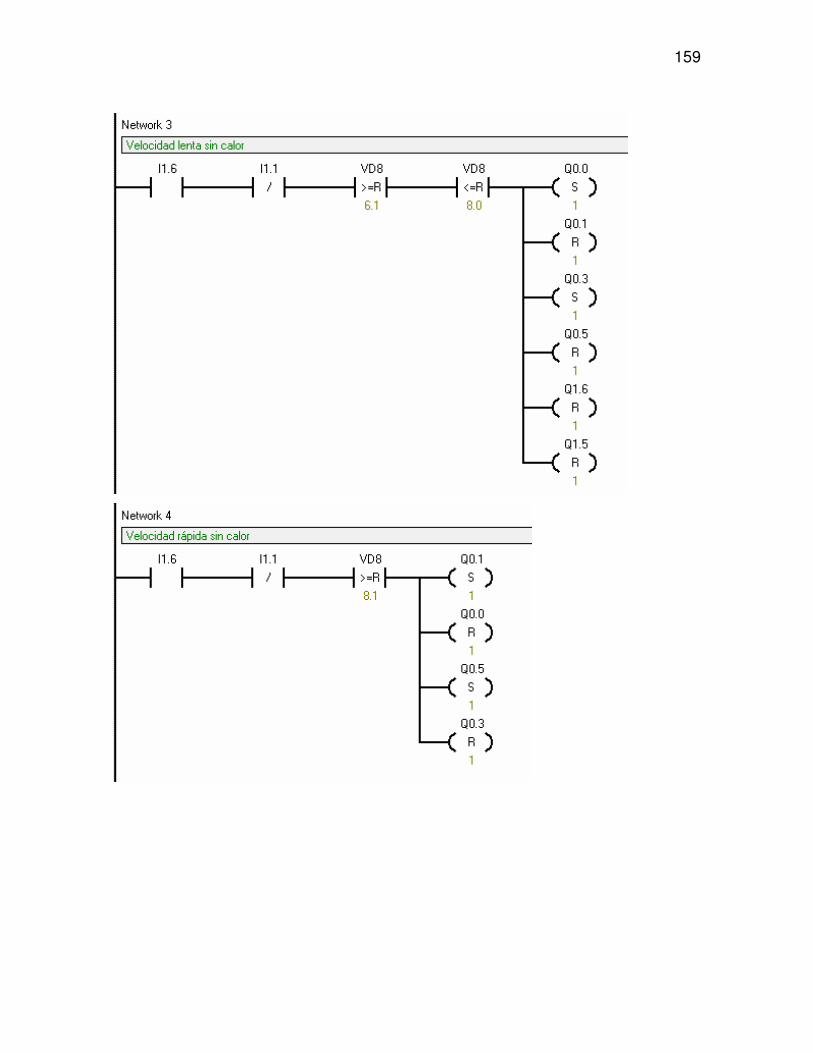
159
160
ANEXO F
PROYECTO DE TRABAJO DE GRADO
Diseño y construcción de Tableros Simuladores para PLC Siemens S7 200
CPU 226 Estudiante: Andrés Felipe Niño C.C. 71.366.63 Ingeniería Electrónica Tel. 421 62 95 e-mail: [email protected] Estudiante: Yerson Santiago Idárraga C.C. 15.371.353 Ingeniería Electrónica Tel. 543 35 79 e-mail: [email protected] Director: Jorge Andrés Valencia Tel : 380 61 48 e-mail: [email protected], Asesor: Hernán Darío Patarroyo Tel: 316 224 75 93 e-mail: [email protected]
ABRIL DE 2006
FACULTAD DE INGENIERÍA ELÉCTRICA-ELECTRÓNICA
UNIVERSIDAD PONTIFICIA BOLIVARIANA
161
Memo de trabajo para el comité:
“Diseño y construcción de tableros simuladores para laboratorio con PLC SIEMENS”
Primera Revisión Recibió: (Representante Comité): ________________________ Fecha: __________ Lectura y asignación de evaluador en comité #: _____________ Fecha: __________ Evaluación preliminar asignada a: ___________________________ Recomendación: Reprobado: Aplazado: Aprobado: Comité #: _________ Firma Responsable: _____________________ Fecha: _______________ Comentarios:
162
1. INVOLUCRADOS Jorge Andrés Valencia Director (Ingeniero Electricista) Hernán Darío Patarroyo Asesor (Ingeniero Electrónico) Andrés Felipe Niño Estudiante de Ingeniería Electrónica Yerson Santiago Idárraga Estudiante de Ingeniería Electrónica
2. MODALIDAD Diseño y desarrollo de prototipo para la asistencia a la docencia. 3. TEMA DEL PROYECTO. Diseñar e implementar cuatro tableros móviles para PLC (haciendo uso de los PLC marca Siemens disponibles en el laboratorio de la facultad de Ingeniería Eléctrica-Electrónica), que permitan interactuar con los tableros existentes en el laboratorio de control y con los motores del mismo, de forma tal que se puedan realizar distintas y variadas prácticas de laboratorio con la ayuda de dichos tableros. Tipo Teórico Experimental Aplicado Gestión Trabajo Busq/Estudio Desarrollo (laboratorio) Prototipo De
campo
% 10 20 20 40 10 0 Las prácticas de laboratorio a implementar tendrán contenidos de diversos temas y conceptos de distintas áreas, lo cual se representa en el siguiente cuadro: Áreas Maquinas y
Potencia Control Industrial Electrónica
Industrial % 35 40 25 4. ANTECEDENTES La Universidad posee PLC en diferentes facultades tales como Ingeniería Química, Ingeniería Mecánica e Ingeniería Eléctrica y Electrónica. En esta última se cuenta con diferentes equipos, los cuales se han dejado de utilizar en los últimos años, lo que ha creado un vacío muy grande a la hora de ejercer la docencia pues éste tema es de vital importancia para la formación del ingeniero de hoy. Su aplicación se ha centrado en el postgrado de automática.
163
Los equipos con los que se ha contado son los siguientes: - 1 Telemecanique TSX 17 (No se opera actualmente) - 1 Sprecher + Schuh step 340 (No se opera actualmente) - 1 Siemens S5 90U (No se opera actualmente) - 1 Siemens LOGOS! (Se opera actualmente) - 1 General Electric Seriesone (No se opera actualmente) - 4 Siemens S7 200 CPU 226 (Adquiridos recientemente) Universidades en la ciudad como EAFIT, Nacional, Antioquia y Politécnico Jaime Izasa Cadavid poseen laboratorios implementados con PLC. Para elegir el PLC tuvimos en cuenta los siguientes criterios: - En primera instancia, se encuentran disponibles actualmente en los laboratorios de Ingeniería Eléctrica –Electrónica de la Universidad Pontificia Bolivariana. - El S7 200 es un PLC muy versátil pues posee una gran aplicabilidad y puede realizar muchos tipos de tareas. - Según las especificaciones del PLC, éste se adecua y se acopla correctamente con los equipos del laboratorio de control de la UPB. - Operacionalmente, éste PLC posee un buen soporte, tanto técnico como lógico, pues además de contar con un gran número de elementos configurables como relés, temporizadores, contadores, secuenciadores etc., posee software, programador y es de marca SIEMENS, la cual es muy reconocida en el mercado. 5. OBJETIVOS 5.1. General: Diseñar e implementar cuatro tableros funcionales de PLC (utilizando los Siemens S7- 200 CPU 226, contactores, pulsadores, señalizadores, breaker entre otros) de fácil manipulación y variadas aplicaciones para el laboratorio de control industrial, teniendo en cuenta las necesidades y las especificaciones de las máquinas y equipos existentes. 5.2. Específicos: Elaborar cuatro prototipos funcionales compatibles en el mayor grado posible con motores, tableros y equipos existentes en el laboratorio.
164
Elaborar, realizar y entregar guía de diez practicas de Laboratorio, tres con niveles básicos (adquisición de habilidades en le programación de PLC), cuatro con niveles medios (manejo de motores del laboratorio) y cuatro de gama alta (incorporación de sensores en lo posible). Elaborar y entregar adecuadamente los planos y especificaciones de los equipos utilizados. 6. JUSTIFICACIÓN Y BENEFICIOS Es de gran importancia el conocimiento básico de PLC para cualquier Ingeniero Electricista-Electrónico, estos dispositivos manejan gran parte de la función de control en los procesos industriales, y es de gran importancia que la facultad de Ingeniería Eléctrica-Electrónica en sus cátedras de Control y electrónica Industrial, máquinas eléctricas entre otras, realice prácticas de laboratorio utilizando adecuadamente los PLC. Facultades diferentes, como Ingeniería Mecánica e Ingeniería Química en la Universidad Pontificia Bolivariana, están desarrollando funciones de control con PLC, funciones naturales para los Ingenieros Electricistas-Electrónicos, por lo tanto también se verán beneficiadas. Universidades de la ciudad como la Universidad Eafit (laboratorio de control digital con PLC, para Ingenieros de Producción, de Sistemas y Electrónicos), la Universidad Nacional (incluyen cátedras acerca del manejo y la programación de PLC para pregrado) y el Sena, aventajan en el campo de PLC a la Universidad Pontificia Bolivariana. Por tales motivos es necesario que la Universidad facilite y capacite en ese tipo de dispositivos a sus estudiantes, adecuando lo mas pronto posible los PLC con los que cuenta en la actualidad. Con la construcción de estos tableros se robustece entre otros el laboratorio de control y es posible implementar prácticas que equiparen a los estudiantes con el manejo y la programación de PLC, al mismo tiempo se fortalecen también los cursos de extensión académica y se complementan con los postgrados. 7. ALCANCES - Prototipos funcionales de los cuatro tableros de PLC Siemens. - Informe de ingeniería detallado de los tableros construidos. - Documentación del prototipo.
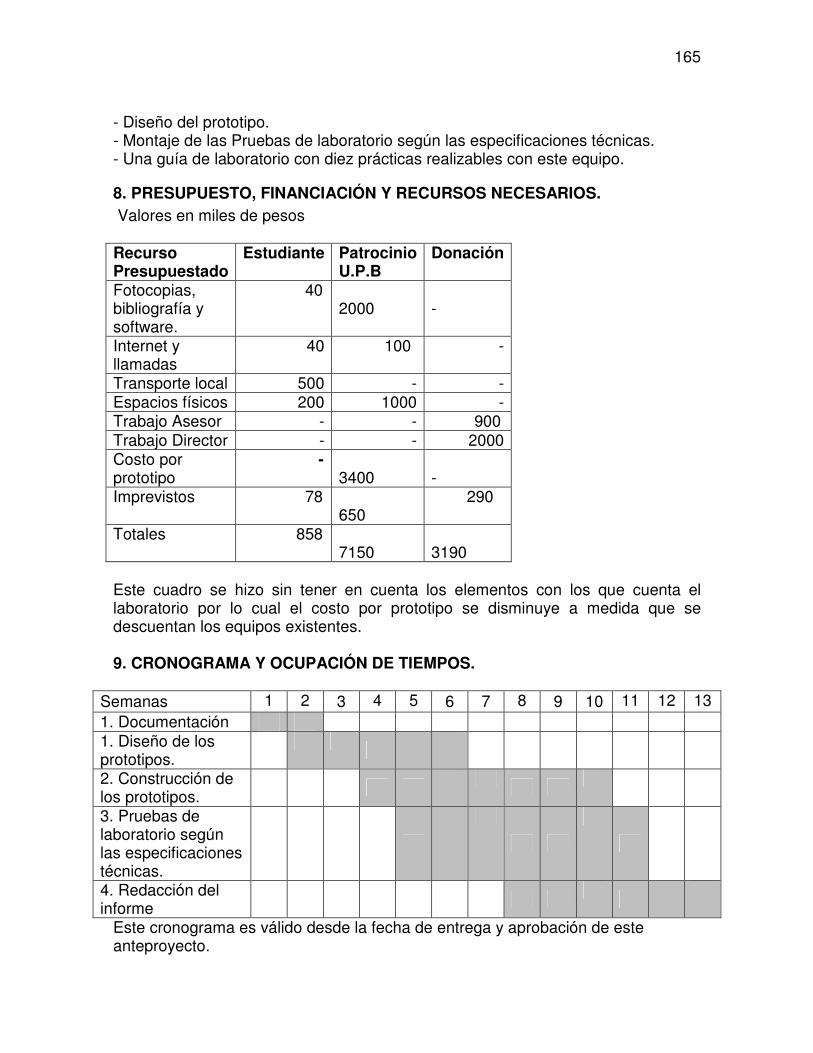
165
- Diseño del prototipo. - Montaje de las Pruebas de laboratorio según las especificaciones técnicas. - Una guía de laboratorio con diez prácticas realizables con este equipo.
8. PRESUPUESTO, FINANCIACIÓN Y RECURSOS NECESARIOS. Valores en miles de pesos Recurso Presupuestado
Estudiante Patrocinio U.P.B
Donación
Fotocopias, bibliografía y software.
40 2000
-
Internet y llamadas
40 100 -
Transporte local 500 - - Espacios físicos 200 1000 - Trabajo Asesor - - 900 Trabajo Director - - 2000 Costo por prototipo
- 3400
-
Imprevistos 78 650
290
Totales 858 7150
3190
Este cuadro se hizo sin tener en cuenta los elementos con los que cuenta el laboratorio por lo cual el costo por prototipo se disminuye a medida que se descuentan los equipos existentes. 9. CRONOGRAMA Y OCUPACIÓN DE TIEMPOS.
Semanas 1 2 3 4 5 6 7 8 9 10 11 12 13 1. Documentación 1. Diseño de los prototipos.
2. Construcción de los prototipos.
3. Pruebas de laboratorio según las especificaciones técnicas.
4. Redacción del informe
Este cronograma es válido desde la fecha de entrega y aprobación de este anteproyecto.
166
10. PROPIEDAD INTELECTUAL Y DESTINACIÓN DEL PROYECTO ACTA DE PROPIEDAD INTELECTUAL del Proyecto Diseño y construcción de tableros simuladores para PLC Siemens S7 200 CPU 226 Los derechos morales de autor corresponden a los graduandos Andrés Felipe Niño y Yerson Santiago Idárraga y a toda persona que, a criterio de éstos, haga aportes originales intelectuales en los avances y en el resultado final del proyecto. Al director Jorge Andrés Valencia le asiste el derecho de mención. El director y los graduando serán autor y coautor de todas las publicaciones nacionales e internacionales que genere el proyecto. Estos a su vez determinarán cual de los colaboradores debe ser mencionado según sus aportes en el proyecto. Adicionalmente, en cualquier tipo de divulgación que se haga del trabajo se dará crédito a La Universidad Pontificia Bolivariana, Ingenierías Eléctrica y Electrónica. Los derechos patrimoniales de este proyecto recaen en su totalidad a la Universidad Pontificia Bolivariana en su laboratorio de I.E.E. Donde la Universidad asume los costos indicados en el presupuesto (apartado 8). El retiro podrá ser voluntario o ser motivado por el incumplimiento de las obligaciones de una de las partes, a criterio del director. Todos los partícipes han estudiado y aceptan el ”Estatuto de propiedad intelectual” de la Universidad Pontificia Bolivariana, el reglamento de elaboración de trabajos de grado IEE y el proyecto del trabajo de grado; y se comprometen a cumplir los deberes que estipulan en estos. Debido a que se trabajara con fondos de la Universidad Pontificia Bolivariana, si al cabo del tiempo pactado por las partes (estudiantes y universidad), la Universidad no ha destinado los recursos para el proyecto, este se dará por terminado con el estudio de viabilidad, diseño y cantidad de obra, para que sea posteriormente ensamblado por los laboratorio de la U.P.B. Sin perjuicio para los estudiantes y con los beneficios que supondría la culminación del mismo.
Graduando: Graduando: ___________________ ___________________ Andrés F. Niño Tabares Yerson S. Idárraga Gómez Asesor: Director: ___________________ ___________________
Hernán D. Patarroyo Jorge A. Valencia
167
11. TABLA DE CONTENIDOS
Capítulo 1. Preliminares Capítulo 2. Estado documentación necesaria y prototipos conocidos. Capítulo 3. Planteamiento diseño. Capítulo 4. Documentación. Capitulo 5. Elaboración y recopilación de laboratorios. Capítulo 6. Implementación del prototipo. Bibliografía ANEXO A. Especificaciones técnicas del PLC ANEXO B. Especificaciones técnicas de los componentes eléctricos ANEXO C. Datos del trabajo de grado 1. Involucrados. 2. Modalidad. 3. Tema del Proyecto. 4. Antecedentes. 5. Objetivos. 6. Justificación y Beneficios. 7. Alcances. 8. Presupuesto, Financiación y Recursos. 9. Cronograma y ocupación de tiempos del desarrollo del proyecto. 10. Propiedad Intelectual y Destinación del Trabajo de grado (Resumen). ANEXO D. Artículo publicable en formato internacional.
168
12. BIBLIOGRAFÍA LEMA RESTREPO, José A . Entrenador para PLC. 2003. Universidad Pontificia Bolivariana. Medellín Colombia.
BOLTON, W. Instrumentation and control systems. 2004 Editorial Elsevier. New York USA.
BETANCUR, Patricia. Rediseño y montaje de los tableros de control industrial para el laboratorio de ingeniería eléctrica y electrónica. 1998 Universidad Pontificia Bolivariana. Medellín Colombia. ARANGO, Claudia. Fundamentos sobre dispositivos lógicos programables PLC. 1992. Universidad Pontificia Bolivariana. Medellín Colombia.
169
ANEXO G
ARTÍCULO PUBLICABLE EN FORMATO INTERNACIONAL
170
Abstract The develop of this project spurt for need
to work out a laboratory of PLC´s, for the Universidad
Pontificia Bolivariana Laboratories, on the matters of
control and laboratory of industrial control principally.
Industrial automatization, motor handling, transporter
bans and very much process are making for these
controllers daily on the different camps of the industry.
Key words — Control industrial, Automatization,
Applications, Controller Logic Programmer (PLC),
industrial boards, unit of exercises.
Palabras clave — Control industrial, Automatización,
Aplicaciones, Controlador Lógico Programable (PLC),
tableros industriales, módulo de prácticas.
RESUMEN El desarrollo de este proyecto surge como respuesta a la necesidad de implementar un laboratorio de PLC (Controladores Lógicos Programables), para los Laboratorios de la Facu ltad de Ingeniería Eléctrica-Electrónica de la Universidad Pontificia Bolivariana, en sus materias de Control y Laboratorio de Control industrial principalmente, aunque no de carácter excluyente para otras asignaturas que también lo requieran, Máquinas y Laboratorio de Máquinas por nombrar algunas, pueden participar de dicho laboratorio y hacer uso directo de este proyecto. Automatización industrial, manejo de motores y bandas transportadoras entre otros muchos procesos industriales son llevados a cabo por estos controladores a diario en los diferentes estamentos de la industria, por tanto, los estudiantes no pueden estar fuera de este conocimiento y deben poseer buenas bases que les permitan interactuar en el momento que lo requieran con estos dispositivos. Este proyecto consta del diseño, implementación y la respectiva documentación de unos tableros industriales simuladores o tableros para PLC. Dichos tableros presenta todos los
Trabajo de grado para optar al título de Ingeniero Electrónico realizado por Yerson Idárraga y Andrés Felipe Niño. Facultad de Ingeniería eléctrica y electrónica de la Universidad Pontificia Bolivariana.
elementos necesarios para realizar y/o simular procesos industriales; PLC, contactores, pulsadores, protecciones como relé térmico, breaker y fusibles, entre otros dispositivos que proveen gran versatilidad y funcionalidad.
I. INTRODUCCIÓN
a presión existente por bajar los costos, la complejidad y los tiempos en los procesos de control y producción hace que los PLC estén cada vez más
difundidos en las aplicaciones de automatización. También la rápida evolución de la industria es un factor que requiere estos dispositivos para resolver las tareas de automatización. El PLC (controlador lógico programab le) también llamado autómata programab le es un dispositivo electrónico programab le, utilizado para cumplir funciones de automatismos lógicos y control de procesos de manufactura en ambiente industrial y tiempo real.Anteriormente muchas de las tareas de control se solucionaban mediante relés y contactores. Esto con frecuencia era bastante engorroso y se denominaba control med iante lógica cableada. Se tenían que diseñar los diagramas de circuito, especificar e instalar los componentes eléctricos y crear listas de cableado. Entonces se debía cablear los componentes necesarios para realizar una tarea específica. Si se cometía un error, los cables tenían que volver a conectarse correctamente. Un cambio en su función o una ampliac ión del sistema requería grandes cambios en los componentes y su recableado.
Lo mismo, además de tareas más complejas, se puede hacer con un PLC. El cableado entre dispositivos y los contactos entre relés se hacen en un programa que se almacena en el la memoria del PLC. Aunque todavía se requiere el cableado para conectar los dispositivos actuadores, sensores y demás, éste es menos intensivo. La modificación de la aplicación y la corrección de errores son más fáciles de realizar. Es más fácil crear y cambiar un programa en un PLC que cablear y recablear un circuito.
II. CARACTERÍSTICAS BÁSICAS
Las características básicas a tener en cuentas a la hora de implementar equipos como estos (tableros industriales de carácter pedagógico) es que deben ser de fácil transporte y
Diseño y construcción de tableros industriales simuladores para PLC
SIEMENS S7 200 CPU 226 UPB.
Yerson Santiago Idárraga G, Andrés Felipe Niño, Estudiantes Ingeniería Electrónica, UPB.
L
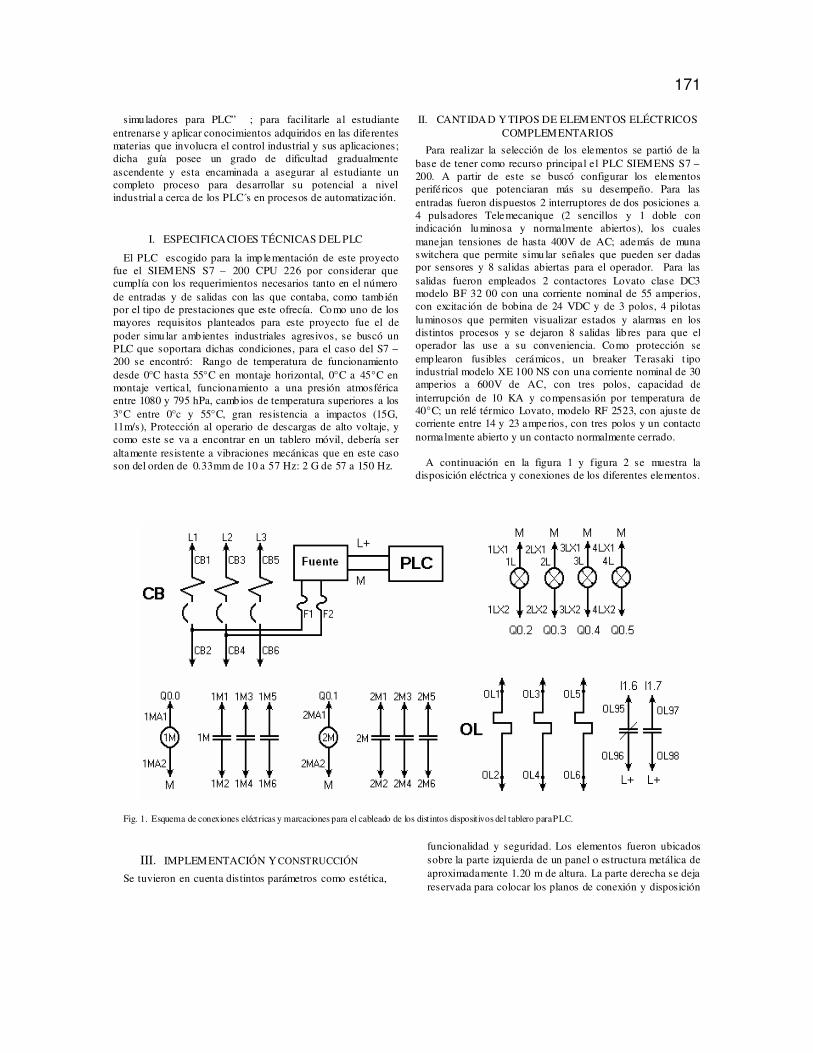
171
simuladores para PLC” ; para facilitarle al estudiante entrenarse y aplicar conocimientos adquiridos en las diferentes materias que involucra el control industrial y sus aplicaciones; dicha guía posee un grado de dificultad gradualmente ascendente y esta encaminada a asegurar al estudiante un completo proceso para desarrollar su potencial a nivel industrial a cerca de los PLC´s en procesos de automatización.
I. ESPECIFICA CIOES TÉCNICAS DEL PLC
El PLC escogido para la imp lementación de este proyecto fue el SIEMENS S7 – 200 CPU 226 por considerar que cumplía con los requerimientos necesarios tanto en el número de entradas y de salidas con las que contaba, como también por el tipo de prestaciones que este ofrecía. Como uno de los mayores requisitos planteados para este proyecto fue el de poder simu lar ambientes industriales agresivos, se buscó un PLC que soportara dichas condiciones, para el caso del S7 – 200 se encontró: Rango de temperatura de funcionamiento desde 0°C hasta 55°C en montaje horizontal, 0°C a 45°C en montaje vertical, funcionamiento a una presión atmosférica entre 1080 y 795 hPa, cambios de temperatura superiores a los 3°C entre 0°c y 55°C, gran resistencia a impactos (15G, 11m/s), Protección al operario de descargas de alto voltaje, y como este se va a encontrar en un tablero móvil, debería ser altamente resistente a vibraciones mecánicas que en este caso son del orden de 0.33mm de 10 a 57 Hz: 2 G de 57 a 150 Hz.
II. CANTIDA D Y TIPOS DE ELEMENTOS ELÉCTRICOS
COMPLEMENTARIOS
Para realizar la selección de los elementos se partió de la base de tener como recurso principal el PLC SIEMENS S7 –200. A partir de este se buscó configurar los elementos periféricos que potenciaran más su desempeño. Para las entradas fueron dispuestos 2 interruptores de dos posiciones a, 4 pulsadores Telemecanique (2 sencillos y 1 doble con indicación luminosa y normalmente abiertos), los cuales manejan tensiones de hasta 400V de AC; además de muna switchera que permite simu lar señales que pueden ser dadas por sensores y 8 salidas abiertas para el operador. Para las salidas fueron empleados 2 contactores Lovato clase DC3 modelo BF 32 00 con una corriente nominal de 55 amperios, con excitac ión de bobina de 24 VDC y de 3 polos, 4 pilotas luminosos que permiten visualizar estados y alarmas en los distintos procesos y se dejaron 8 salidas lib res para que el operador las use a su conveniencia. Como protección se emplearon fusibles cerámicos, un breaker Terasaki t ipo industrial modelo XE 100 NS con una corriente nominal de 30 amperios a 600V de AC, con tres polos, capacidad de interrupción de 10 KA y compensasión por temperatura de 40°C; un relé térmico Lovato, modelo RF 2523, con ajuste de corriente entre 14 y 23 amperios, con tres polos y un contacto normalmente abierto y un contacto normalmente cerrado.
A continuación en la figura 1 y figura 2 se muestra la
disposición eléctrica y conexiones de los diferentes elementos.
Fig. 1. Esquema de conexiones eléctricas y marcaciones para el cableado de los distintos dispositivos del tablero para PLC.
III. IMPLEMENTACIÓN Y CONSTRUCCIÓN
Se tuvieron en cuenta distintos parámetros como estética,
funcionalidad y seguridad. Los elementos fueron ubicadossobre la parte izquierda de un panel o estructura metálica de aproximadamente 1.20 m de altura. La parte derecha se deja reservada para colocar los planos de conexión y disposición
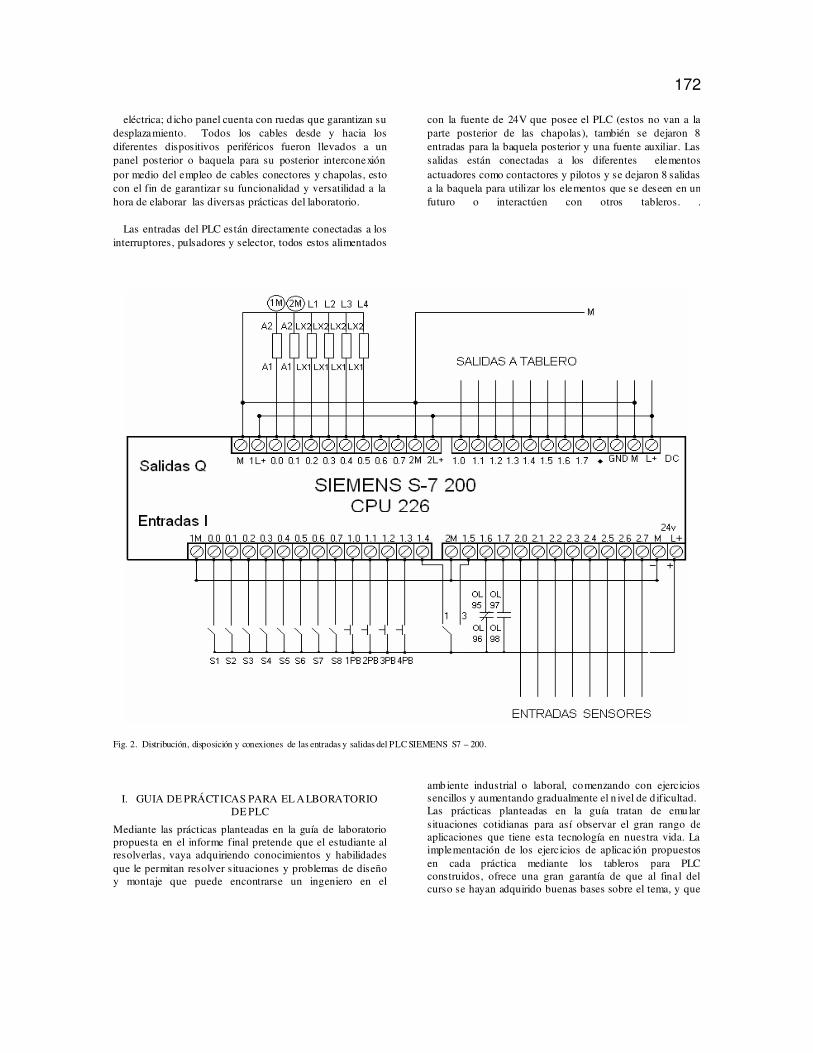
172
eléctrica; d icho panel cuenta con ruedas que garantizan su desplazamiento. Todos los cables desde y hacia los diferentes dispositivos periféricos fueron llevados a un panel posterior o baquela para su posterior interconexión por medio del empleo de cables conectores y chapolas, esto con el fin de garantizar su funcionalidad y versatilidad a la hora de elaborar las diversas prácticas del laboratorio.
Las entradas del PLC están directamente conectadas a los
interruptores, pulsadores y selector, todos estos alimentados
con la fuente de 24V que posee el PLC (estos no van a la parte posterior de las chapolas), también se dejaron 8 entradas para la baquela posterior y una fuente auxiliar. Las salidas están conectadas a los diferentes elementos actuadores como contactores y pilotos y se dejaron 8 salidas a la baquela para utilizar los elementos que se deseen en un futuro o interactúen con otros tableros. .
Fig. 2. Distribución, disposición y conexiones de las entradas y salidas del PLC SIEMENS S7 – 200.
I. GUIA DE PRÁCTICAS PARA EL A LBORATORIO DE PLC
Mediante las prácticas planteadas en la guía de laboratorio propuesta en el informe final pretende que el estudiante al resolverlas, vaya adquiriendo conocimientos y habilidades que le permitan resolver situaciones y problemas de diseño y montaje que puede encontrarse un ingeniero en el
ambiente industrial o laboral, comenzando con ejercicios sencillos y aumentando gradualmente el n ivel de d ificultad. Las prácticas planteadas en la guía tratan de emular situaciones cotidianas para así observar el gran rango de aplicaciones que tiene esta tecnología en nuestra vida. La implementación de los ejercicios de aplicación propuestos en cada práctica mediante los tableros para PLC construidos, ofrece una gran garantía de que al final del curso se hayan adquirido buenas bases sobre el tema, y que
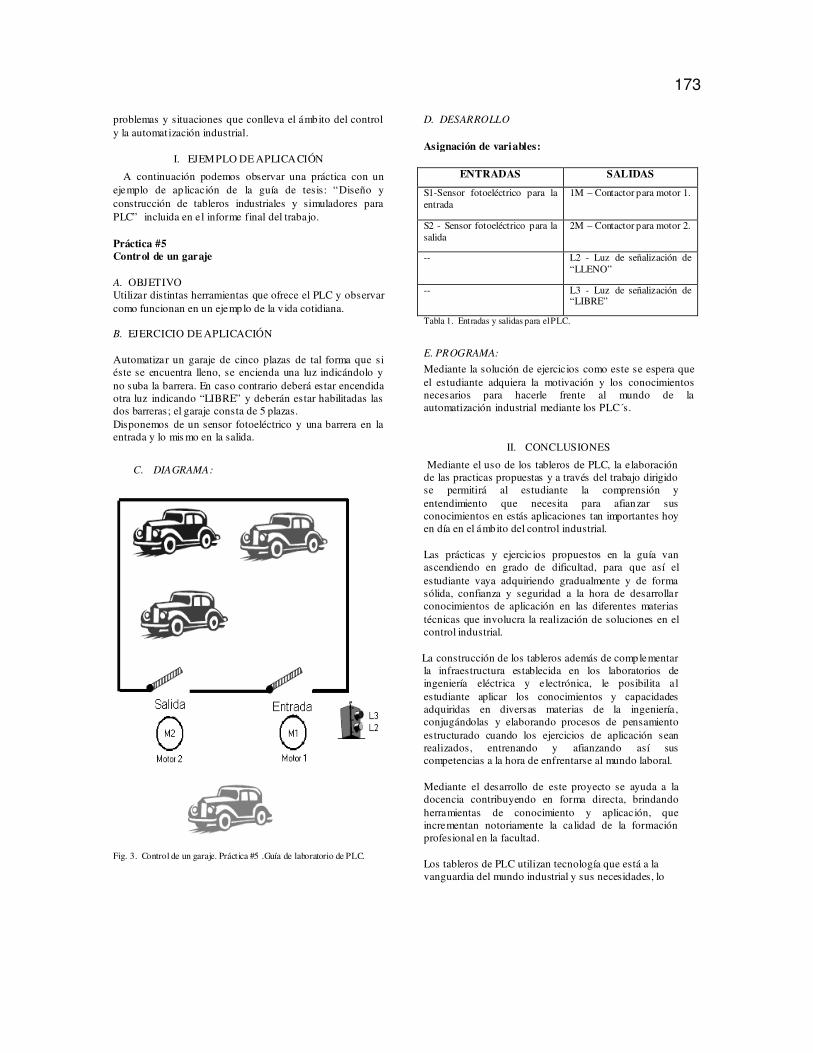
173
problemas y situaciones que conlleva el ámbito del control y la automat ización industrial.
I. EJEMPLO DE APLICA CIÓN
A continuación podemos observar una práctica con un ejemplo de ap licación de la guía de tesis: “Diseño y construcción de tableros industriales y simuladores para PLC” incluida en el informe final del trabajo.
Práctica #5
Control de un garaje
A. OBJETIVO Utilizar distintas herramientas que ofrece el PLC y observar como funcionan en un ejemplo de la v ida cotidiana.
B. EJERCICIO DE APLICACIÓN Automatizar un garaje de cinco plazas de tal forma que si éste se encuentra lleno, se encienda una luz indicándolo y no suba la barrera. En caso contrario deberá estar encendida otra luz indicando “LIBRE” y deberán estar habilitadas las dos barreras; el garaje consta de 5 plazas. Disponemos de un sensor fotoeléctrico y una barrera en la entrada y lo mis mo en la salida.
C. DIAGRAMA:
Fig. 3. Control de un garaje. Práctica #5 .Guía de laboratorio de PLC.
D. DESARROLLO
Asignación de variables:
ENTRADAS SALIDAS
S1-Sensor fotoeléctrico para la entrada
1M – Contactor para motor 1.
S2 - Sensor fotoeléctrico para la salida
2M – Contactor para motor 2.
-- L2 - Luz de señalización de “LLENO”
-- L3 - Luz de señalización de “LIBRE”
Tabla 1. Entradas y salidas para el PLC.
E. PROGRAMA:
Mediante la solución de ejercicios como este se espera que el estudiante adquiera la motivación y los conocimientos necesarios para hacerle frente al mundo de la automatización industrial mediante los PLC´s.
II. CONCLUSIONES
Mediante el uso de los tableros de PLC, la elaboración de las practicas propuestas y a través del trabajo dirigido se permitirá al estudiante la comprensión y entendimiento que necesita para afianzar sus conocimientos en estás aplicaciones tan importantes hoy en día en el ámbito del control industrial. Las prácticas y ejercicios propuestos en la guía van ascendiendo en grado de dificultad, para que así el estudiante vaya adquiriendo gradualmente y de forma sólida, confianza y seguridad a la hora de desarrollar conocimientos de aplicación en las diferentes materias técnicas que involucra la realización de soluciones en el control industrial.
La construcción de los tableros además de complementar la infraestructura establecida en los laboratorios de ingeniería eléctrica y electrónica, le posibilita al estudiante aplicar los conocimientos y capacidades adquiridas en diversas materias de la ingeniería , conjugándolas y elaborando procesos de pensamiento estructurado cuando los ejercicios de aplicación sean realizados, entrenando y afianzando así sus competencias a la hora de enfrentarse al mundo laboral. Mediante el desarrollo de este proyecto se ayuda a la docencia contribuyendo en forma directa, brindando herramientas de conocimiento y aplicación, que incrementan notoriamente la calidad de la formación profesional en la facultad. Los tableros de PLC utilizan tecnología que está a la vanguardia del mundo industrial y sus necesidades, lo
174
cual es de gran importancia para la formación y preparación de los ingenieros de hoy.
IX. BIBLIOGRAFÍA [1] BETANCUR J, Patric ia. Rediseño y montaje de
los tableros de control industrial para e l laboratorio de ingeniería eléctrica y electrónica. 1998. Tesis. Universidad Pontificia Bolivariana. Medellín Colombia
[2] ESCOBAR ZULUA GA, Antonio. Automatas Programables o PLC. En: Electrónica y Computadores. Pereira. Vol 1, No 4 (1994); p. 39 – 43.
[3] CONTROL Y ELECTRÓNICA INDUSTRIAL, Notas de clases orientadas por el profesor Hernán Valencia , docente del área de automatización y Control Industrial de la Universidad Pontific ia Bolivariana. Medellín, 2004
[4] IDARRA GA G, Yerson S. Diseño y construcción de tableros industriales y simuladores para PLC 2006. Tesis (Ingeniero Electrónico). Un iversidad Pontific ia Bolivariana. Facultad de Ingeniería Electrónica.
[5] BOLTON, W. Instrumentation and control systems. 2004. Ed itorial Elsevier. New York, USA.
[6] RAMOS R, Guillermo . Los PLC. En: Electrónica y Computadores. Pereira. Vo l 4, No 3 (1997); p. 45 – 48
[7] SIEMENS. Manual de referencia del PLC SIEMENS S7 – 200 CPU 226. Alemania: Siemens S.A, 2000. 520p
[8] LEMA RESTREPO, José A. Entrenador para PLC. 2003. Tesis. Universidad Pontific ia Bolivariana. Facu ltad de Ingeniería Electrónica.
X. AUTORES
Yerson Santiago Idárraga G. Estudiante de la Facultad de Ingeniería Electrónica de Universidad Pontificia Bolivariana de Medellín, Colombia. Presentó como Trabajo de grado para optar al t itulo de Ingeniero Electrónico: “Diseño y construcción de tableros industriales y simuladores para PLC” bajo la modalidad de Desarrollo de
Prototipo, como apoyo a la docencia en el área de automatización y control Industrial de la Universidad Pontific ia Bolivariana. Actualmente se encuentra adelantando trámites para su graduación y posterior vinculación al mundo laboral.
Andrés Felipe Niño T. Estudiante de la Facultad de Ingeniería Electrónica de Universidad Pontificia Bolivariana de Medellín, Colombia. Presentó como Trabajo de grado para optar al titulo de Ingeniero Electrónico: “Diseño y construcción de tableros industriales y simuladores para PLC” bajo la modalidad de
Desarrollo de Prototipo, como apoyo a la docencia en el área de automatización y control Industrial de la Universidad Pontific ia Bolivariana. Actualmente se encuentra adelantando trámites para su graduación y posterior vinculación al mundo laboral.