UNIVERSIDAD POLITÉCNICA DE VALENCIA · • Dos bombas de tipo 22P40-250 NC SAER, con una potencia...
46
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A UNIVERSIDAD POLITÉCNICA DE VALENCIA ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA AGRÍCOLA AUTOMATIZACIÓN DE LA CAPTACIÓN Y TRATAMIENTO DE DATOS EN EL BANCO DE ENSAYOS DE EQUIPOS HIDRÁULICOS DEL LABORATORIO DE INGENIERÍA RURAL, CON EL DESARROLLO DE UNA APLICACIÓN EN LABVIEW TRABAJO FINAL DE CARRERA ALUMNO: DAVID DE LA TORRE RAUSELL DIRECTOR ACADÉMICO: JAIME ARVIZA VALVERDE DIRECTOR EXPERIMENTAL: PABLO GONZÁLEZ ALTOZANO VALENCIA, OCTUBRE DE 2003
Transcript of UNIVERSIDAD POLITÉCNICA DE VALENCIA · • Dos bombas de tipo 22P40-250 NC SAER, con una potencia...

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
UNIVERSIDAD POLITÉCNICA DE VALENCIA
ESCUELA UNIVERSITARIA DE INGENIERÍA
TÉCNICA AGRÍCOLA
AUTOMATIZACIÓN DE LA CAPTACIÓN Y TRATAMIENTO DE DATOS EN EL BANCO DE ENSAYOS DE EQUIPOS HIDRÁULICOS
DEL LABORATORIO DE INGENIERÍA RURAL, CON EL DESARROLLO DE UNA
APLICACIÓN EN LABVIEW
TRABAJO FINAL DE CARRERA ALUMNO:
DAVID DE LA TORRE RAUSELL
DIRECTOR ACADÉMICO: JAIME ARVIZA VALVERDE
DIRECTOR EXPERIMENTAL:
PABLO GONZÁLEZ ALTOZANO
VALENCIA, OCTUBRE DE 2003

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- I-
INDICE GENERAL
1 INTRODUCCIÓN.....................................................................................................1 1.1 Como surgió la idea ............................................................................. 1
1.2 Autor .................................................................................................... 1
1.3 Lugar de desarrollo .............................................................................. 1
1.4 Introducción a Labview, un instrumento virtual (VI).............................. 2
2 MATERIALES Y MÉTODOS..................................................................................2 2.1 Equipamiento del laboratorio ............................................................... 2
2.2 Descripción genérica del laboratorio: ................................................... 3
2.3 Sensores de presión: ........................................................................... 4
2.4 Sensores de caudal electromagnéticos: .............................................. 7
2.5 Tarjeta de adquisición de datos PCI E6023 de Nationals Instruments. 8
2.6 Programación gráfica ........................................................................... 9
2.6.1 Programación Modular y Estructurada................................................... 12 2.6.2 Diseño de una aplicación........................................................................ 14
2.7 Introducción de comandos de Labview, usados en el VI . ................. 15
3 RESULTADOS .......................................................................................................18 3.1 Funcionamiento del programa ........................................................... 18
3.1.1 Flujo de Datos......................................................................................... 20 3.1.2 Descripción de funciones........................................................................ 22 3.1.3 Detalle del funcionamiento de los subVI creados para este programa en concreto: 29
3.2 Calibración de los sensores ............................................................... 32
4 APLICACIÓN.........................................................................................................38 4.1 Utilización del programa..................................................................... 38
5 CONCLUSIONES...................................................................................................41

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- II-
INDICE DE FIGURAS Figura 1, vista general del banco de pruebas del laboratorio. ........................... 4
Figura 2, conexiones de los sensores de presión a la regleta de la tarjeta de
adquisición de datos ................................................................................... 5
Figura 4, diagrama de programación ............................................................... 11
Figura 5, Introducción de datos al programa y ordenación. ............................. 25
Figura 7, la matriz inicial se desglosa en cuatro submatrices, número de sensor,
valor de lectura en voltios, pendiente y constante..................................... 25
Figura 8, se aplican las formulas de calibrado, para obtener el valor en las
unidades deseadas. .................................................................................. 26
Figura 9, se hace la transpuesta de la matriz................................................... 26
Figura 10, en este paso se preparan los datos para hacer la media................ 27
Figura 11, salen los datos de la estructura Sequence, y esperan a que se
termine el bucle. ........................................................................................ 27
Figura 12 , cuenta el número de muestras. ...................................................... 28
Figura 13, se aplica la media a las matrices de los valores calibrados, los datos
se dirigen a la gráfica de “Valores medios”. Por último se guardan en una
hoja de Excel............................................................................................. 28
Figura 13, Estructura Case dentro de una estructura For Loop, utilizada para
repitir el ciclo mientras tantas veces como datos de entrada tenga. ......... 29
Figura 14, forma una matriz con los valores seleccionados. ............................ 30
Figura 16, ......................................................................................................... 31
Figura 17 .......................................................................................................... 32
Figura 18, sensor de presión junto al manómetro tipo bourdon utilizado para su
calibración ................................................................................................. 33
Figura 19, regleta. ............................................................................................ 33
Figura 20, tarjeta readquisición de datos conectada en una ranura PCI.......... 34
Figura 22, sensor N2 de 10 bar........................................................................ 35

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- III-
Figura 23, sensor de presión N-1 de 6 bar. ..................................................... 35
Figura 24, sensor N-2 de 0-6 bar .................................................................... 36
Figura 25, caudalímetro electromagnético. N-1............................................... 37
Figura 27, Pérdidas de carga en una placa orificio 5mm. Válvula ¾............... 39
Figura 29, Pérdidas de carga en una placa orificio 30mm. Válvula 3”............. 40

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 1-
1 INTRODUCCIÓN
Poco a poco la tecnología se introduce en todos los sectores. Incluso en un
sector tradicionalmente con gran resistencia al cambio, como el agrícola, cada
día es más decisiva, y se hace imprescindible, para controlar los posibles
factores que influyen en el funcionamiento y rendimiento de las explotaciones.
Por ello, la posibilidad de automatizar el control de todos esos factores de una
forma sencilla y clara, para posteriormente ser interpretados y en
consecuencia, actuar de una forma rápida, se traduce en un ahorro de tiempo y
dinero.
1.1 Como surgió la idea
Este proyecto surgió a partir de una iniciativa del Departamento de
Ingeniería Rural, pensó en una mejora del laboratorio de hidráulica, solicitando
para ello una beca P.I.E.
1.2 Autor
La aplicación ha sido desarrollada conjuntamente entre el alumno de
Mecanización y Construcciones Agrarias, David de la Torre Rausell, y los
profesores Pablo González, Jaime Arviza e Iban Balbastre, todos ellos
pertenecientes al Departamento de Ingeniería Rural.
1.3 Lugar de desarrollo
El lugar de desarrollo de la aplicación fue el propio laboratorio de
ingeniería rural de la E.U.I.T.A.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 2-
1.4 Introducción a Labview, un instrumento virtual (VI).
Cuando se habla de instrumentos de medida, es normal pensar en una
carcasa rígida, en la que destaca su “panel frontal” lleno de botones, leds,
indicadores, gráficos, etc. En la cara oculta del panel, los sensores se conectan
a unos circuitos que accionan y procesan las señales de entrada, en función
del estado de los controles, devolviendo el resultado a los correspondientes
visualizadores del panel frontal.
Un instrumento virtual es un módulo de programación que simula el
panel frontal del instrumento que antes hemos comentado y apoyándose en
elementos de hardware accesibles por el ordenador: tarjetas de adquisición de
datos, instrumentos accesibles vía GPIB,( General Purpose Interface Bus,
Bus estándar para controlar mediante ordenadores elementos electrónicos),
RS232, (Recommended Standard 232), realiza las medidas como si se
tratase de un instrumento real.
De este modo, cuando se ejecuta un programa que funciona como
instrumento virtual o (VI), el usuario ve en la pantalla del ordenador un panel
cuyo aspecto es idéntico al panel de un instrumento físico, facilitando la
interpretación de la información y permitiendo el control del sistema, como lo
haría su homologo físico.
2 MATERIALES Y MÉTODOS
2.1 Equipamiento del laboratorio
Para su monitorización, lectura y tratamiento:
Sensores de presión
Caudalimetros electromagnéticos
Tarjeta adquisición de datos PCI-E6023 de National Instrumens Fuente de alimentación de 24 V-4A
Elementos accesorios, (cables, resistencias, etc.)
Ordenador Compatible Pentium

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 3-
2.2 Descripción genérica del laboratorio:
Ordenador PC compatible Pentium
Los requisitos mínimos del ordenador son:
Procesador Intel Pentium con 64 Mbyte de memoria RAM. Placa
controladora de video de 1 Mbyte de RAM y el disco duro con unos 350 Mb
libres. Disponer además de 8 ranuras ISA de 16 bits o PCI.
El software necesario para la ejecución de la aplicación es el sistema operativo
Windows, sobre el que instalamos los paquetes de programación gráfica para
el control de instrumentación Labview versión 6i.
Elementos del Laboratorio:
• Un deposito de agua con una capacidad de 5000 litros.
• Dos bombas de tipo 22P40-250 NC SAER, con una potencia de 20 CW,
2900 r/mim, caudal de 10 a 70 m3/h y una altura manométrica de 81 a 55
metros de columna de agua (m.c.a.), se alimenta a 220V. Una de las
bombas es gobernada mediante un variador de frecuencia. La conexión
de las bombas al banco de pruebas permite que estas trabajen solas o
bien que se conecten en serie o en paralelo.
• Dos válvulas de compuerta de 4”.
• Un filtro de malla de 6”.
• Dos válvulas de compuerta de 3”.
• Dos caudalimetros electromagnéticos.
• Válvula contador limitadora de caudal, mediante placas orificio.
Todos estos elementos están unidos mediante una tubería de PVC de
3”, excepto a la salida de las bombas, en que se ha usado tubería de fundición
de 4”. El banco de pruebas dispone de dos “brazos de trabajo”, uno de 3” y el
otro de 2”, para tener mayor versatilidad a la hora de su uso.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 4-
Figura 1, vista general del banco de pruebas del laboratorio.
2.3 Sensores de presión:
Descripción genérica de los sensores
Los transductores de presión, están diseñados para convertir la presión
en el interior de la tubería a una intensidad de entre 4 y 20 mA, proporcional a
la presión a que están sometidos. Como la tarjeta de adquisición de datos
únicamente es capaz de medir voltaje, esta intensidad se transforma en una
diferencia de potencial colocando la resistencia apropiada entre los bornes de
lectura en la tarjeta.
Los sensores requieren una fuente de alimentación para proporcionar la
señal. Tanto la resistencia como la fuente deben seleccionarse
adecuadamente.
Conexiones
Hay dos formas de conectar los sensores. Dependiendo de la conexión
elegida las señales serán de diferente tipo. La forma de conexión realizada
consiste en, usar sólo dos contactos del sensor, 1 y 2 (figura 2). Mediante una

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 5-
fuente de alimentación, unimos el contacto 2 del sensor con el positivo de la
fuente y el 1 del sensor con el positivo de la tarjeta. En este tipo de conexión, el
sensor proporciona una intensidad entre 4-20 mA, que posteriormente se
transforma en voltaje mediante una resistencia, colocada entre los bornes de
lectura de la tarjeta.
Ω
Figura 2, conexiones de los sensores de presión a la regleta de la tarjeta de adquisición de datos
Fuente de alimentación
La fuente de alimentación según especificaciones técnicas del fabricante
de los sensores, debe proporcionar una diferencia de potencial en el rango de
10-30 V. Se ha elegido una fuente de 24V, tras comprobar que con una de 12 V
el error introducido por el ruido era demasiado grande.
Resistencias
La resistencia es una de las claves en el acondicionamiento de la señal.
Un mal uso de este parámetro puede acarrear la disminución de la precisión,
pudiendo incluso llegar a imposibilitar la toma de datos, cuando la intensidad
aumenta por encima de los límites permitidos por la tarjeta de adquisición de
datos. Para la elección de la resistencia, se parte del rango de voltaje de la
tarjeta de adquisición de datos, que permite leer entre -10 a 10 V. Las
resistencias utilizadas son de 484 Ω y de 1% de precisión. A continuación se
muestran las ecuaciones utilizadas para el cálculo de las resistencias, así como
el rango de medida:

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 6-
La siguiente formula permite calcualr resistencia máxima que podemos
utilizar:
( )02.0
10−≤ inVR
Sustituyendo el valor Vin = 24 V obtenemos:
( )Ω=
−≤ 700
02.01024R
Como la resistencia elegida es de 484 Ω, el rango de medida será:
VRIV 936.1484004.0 =⋅=⋅=
VRIV 68.948402.0 =⋅=⋅=
Rango que está dentro del límite permitido por la tarjeta ±10V y es
suficientemente amplio como para permitir una precisión más que aceptable.
Tipos de sensores de presión:
Los sensores de presión se pueden clasificar en base a sus presiones
máximas y mínimas de trabajo. En el laboratorio disponemos de los siguientes
tipos:
P= 0-2,5 bar
P= 0-6 bar
P= 0-10 bar

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 7-
2.4 Sensores de caudal electromagnéticos:
Descripción genérica de los sensores
Principios de Funcionamiento:
La medición de fluidos por medio del contador electromagnético está
basada en el principio de Faraday: según el cuál, si a través de un campo
magnético se hace pasar un fluido conductivo, se produce una fuerza
electromotriz en un plano perpendicular al campo magnético y a la dirección del
fluido directamente proporcional a la velocidad del mismo. La fuerza
electromotriz inducida es proporcional a la velocidad y por tanto al caudal.
Medidor:
Está constituido principalmente por un tubo, revestido en su interior de
material aislante. Sobre dos puntos diametralmente opuestos de la superficie
interna, se encuentran los dos electrodos metálicos entre los cuáles se genera
la señal eléctrica medida. En la parte externa del tubo se encuentran
perpendicularmente a los electrodos de medida los dispositivos que generan el
campo magnético. Todo está recubierto de una protección externa con diversos
grados de seguridad.
Convertidor:
El convertidor electrónico sirve principalmente para amplificar y
acondicionar las señales provenientes de los electrodos.
Suministra al medidor la corriente necesaria para generar el campo
magnético. Permite variar el valor del caudal de fondo de escala respecto al
valor nominal del medidor. Genera una señal eléctrica proporcional al caudal.
El convertidor esta provisto de autocero, por tanto no es necesario ningún
ajuste del cero en el momento de la instalación.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 8-
Conexiones
Dispone de una fuente de alimentación y de salidas de 0-6 V
proporcional al caudal. La conexión a la tarjeta es directa sin resistencias,
puesto que proporciona una señal en voltios que la tarjeta es capaz de medir (0
a 6 V).
Tipo de contador electromagnético:
Modelo MC106/A de la casa Hidroconta.
2.5 Tarjeta de adquisición de datos PCI E6023 de Nationals Instruments.
Se trata de una tarjeta de bajo coste, multifunción de entradas
analógicas y digitales, con salidas digitales y de temporización, destinada a
ordenadores compatibles. Sus características principales son:
-16 canales single ended (simples) o 8 diferenciales, ambos de 16 bit
-Frecuencia de muestreo de 200kS/s
-Ganancia programable de 1, 10, 100
-Margen de entrada de ±10 V
-Protección contra sobre tensión de ± 35 V
-2 contadores/temporizadores de 24 bit, 20MHz
Tras la instalación, se configura la tarjeta de adquisición de datos,
definiendo y configurando todos los canales a utilizar. Esta parte es muy
delicada, debido a que es donde se define como se van a conectar los
sensores a los canales. Existen dos formas de conexión:
a) Canales simples referenciados a tierra:
Con esta disposición duplicamos el número de canales que se pueden
medir con la tarjeta, hasta un total de 16. Esta forma se basa en utilizar el

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 9-
positivo y el negativo de cada canal de la tarjeta, como si fueran dos canales
independientes. Usando el destinado a tierra para la referencia en la lectura de
datos. Físicamente las conexiones se realizan de la siguiente manera:
Se conectan el positivo del sensor y de la fuente de alimentación (figura
2). El borne negativo del sensor se conecta al positivo del canal de medida en
al tarjeta. El borne negativo de la fuente de alimentación se conecta al tierra de
la tarjeta. Para calcular la intensidad que genera el sensor en función de la
presión, se mide la diferencia de potencial entre el + o - y tierra, colocando una
resistencia entre ambas (figura 2). Al conectar de esta manera se pierde
precisión en la lectura, pero aun así, es más que aceptable y nos permite
disponer del doble de canales.
b) Canales diferenciales:
De esta forma se utiliza el positivo y el negativo de la tarjera para un solo
canal. Por lo que pueden llegar a leerse como máximo hasta 8 canales a la
vez, pero con mayor precisión. En la configuración hay que definir que tipo de
señal y en que rango va a medir cada canal.
2.6 Programación gráfica
Cuando se crea un VI en Labview trabajamos con dos ventanas: una se
implementará en el panel frontal (Fig. 1.3) y otra soportará el nivel de
programación, diagrama (Fig. 1.4). Para la creación del panel frontal se dispone
de una completa librería de controles e indicadores de todo tipo y además,
existe la posibilidad de crear todos los necesarios, por el propio usuario.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 10-
Figura 3, Panel frontal.
Cuando un control es “pegado” desde la librería del panel frontal al
propio panel frontal, se crea una variable cuyos valores vendrán determinados
por el usuario. Inmediatamente, aparece un terminal en la ventana de
programación. La programación del VI consistirá en conectar los terminales
ligados al control del panel frontal, que son bloques funcionales, de tal forma
que se visualice el panel frontal deseado y se ejecuten las tareas y controles
programados, por ejemplo, que se encienda una luz o salte una alarma, cuando
la presión en un punto sea menor que en otro. Los bloques funcionales son
funciones del código de programación que realizan tareas especificas, se
representan mediante iconos con entradas y salidas para conectar unos
bloques a otros, mediante cables ficticios por donde fluyen los datos,

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 11-
constituyendo el nivel de programación del VI.
Figura 4, diagrama de programación
Podemos comparar la ventana de programación con una placa de
circuito impreso, donde los terminales del panel frontal se cablean a bloques
funcionales (circuito integrado), los cuales se interconectan para utilizar los
datos tomados con la tarjeta de adquisición en las operaciones internas del
programa, y así mostrarlos en pantalla, y/o guardarlos conforme se desee. A su
vez, estos diagramas contienen bloques circuitales conectados ente sí, al igual
que un icono está formado por la interconexión de otros iconos. La
programación gráfica permite diseñar un VI de manera bastante intuitiva,
plasmando las ideas de forma similar a un diagrama de bloques, como se haría
sobre una pizarra.
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 12-
2.6.1 Programación Modular y Estructurada
Programación estructurada
Nuestro objetivo es programar de forma clara, simple y fiable. Un criterio
que podemos aplicar, es intentar que el texto del programa (estructura estática)
nos dé una idea clara de la evolución seguida por el programa cuando se
ejecuta (estructura dinámica).Todo proceso complejo puede descomponerse en
acciones elementales, que convenientemente dispuestas, constituyen acciones
más complejas.
Con tal fin limitaremos el conjunto de estructuras a :
· Secuencial
· Condicional
· Iterativa
Estructura secuencial:
Un proceso será secuencial cuando conste de una serie de acciones
elementales, que se ejecutarán en el orden que se ha establecido. Como
ejemplo, para realizar el proceso PAN CON TOMATE las acciones que
realizaremos serán:
Inicio de secuencia
Acción 1 Cortar el pan
Acción 2 Rallar el tomate
Acción 3 Untar el tomate en el pan
Acción 4 Poner el aceite
Fin de la secuencia
Estructura condicional:
La emplearemos cuando dos acciones alternativas y excluyentes
dependan de una condición. En el lenguaje natural diremos SI “hace frío”
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 13-
Entonces “iré a la montaña” SI NO “iré a la playa”. IF “hace frío” THEN “iré a la
playa” ELSE “me quedo en casa”. La condicional múltiple puede ser generada
a partir de IF encadenado o mediante la instrucción Case.
Estructura repetitiva o iterativa:
“Mientras haya luz recoge las sillas del jardín”
“Pon las patatas en la cazuela hasta que esté llena”
“Copia cien veces la lección”
Son acciones que implican la repetición de un proceso (recoger una silla,
poner una patata, copiar una lección). Pero existen diferencias entre ellas.
En el primer caso se repite la acción mientras la condición es cierta. Si
es falsa nunca se ejecuta.
En el segundo repetimos la acción hasta que la condición se cumple. Si
al empezar ya es cierta la condición, la acción o acciones se ejecutan como
mínimo una vez.
En el tercer caso repetimos la acción o acciones tantas veces como nos
indica una variable contador.
Labview dispone de las estructuras WHILE LOOP y FOR LOOP, para
programar este tipo de estructuras.
Programación Modular
La programación modular, es un método de diseño que consiste en
dividir el problema total en pequeñas partes que poseen personalidad propia.
Diseño Top-Down: este diseño se basa en la creación de macro aplicaciones a
partir de estructuras simples.
Frecuentemente debe repetirse una cierta secuencia de sentencias en
varios lugares de un programa. Para ahorrar al programador el tiempo y el
esfuerzo necesarios en copiar de nuevo estas sentencias, muchos lenguajes
de programación ofrecen una posibilidad de subrutina (subprograma o subVI).
Este mecanismo posibilita asignar un nombre, libremente elegido a una

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 14-
secuencia de sentencias y entonces utilizar este nombre como una abreviatura
en cualquier parte en que se deba ejecutar esta secuencia de sentencias. En
Labview, la utilización de subprogramas llamados subVI simplifica la
programación. No existe diferencia entre funciones y procedimientos. Un subVI
se puede ejecutar sin necesidad de ejecutar toda la aplicación; algo impensable
en lenguajes de programación como Pascal, donde un procedimiento necesita
ejecutarse dentro del programa. El pase de parámetros se hace a través de los
terminales de conexión del bloque, donde aparece un cierto número de
terminales definidos en la creación del icono correspondiente del subVI.
2.6.2 Diseño de una aplicación
USO DE Labview
Como ya sabemos, los programas creados en Labview reciben el nombre de
Instrumentos Virtuales (Virtuals Instrumenst ,VI). Cada VI consta de los
siguientes tres componentes:
· Un Panel Frontal. Es la interface del usuario.
· Un Diagrama de Bloques. Contiene el código fuente gráfico que define la
funcionalidad del VI.
· Icono conector. Identifica a cada VI, de manera que podemos utilizarlo
dentro de otro VI. Un VI dentro de otro VI recibe el nombre de subVI. Seria
como una subrutina en un lenguaje de programación basado en texto.
Panel Frontal y Diagrama de Bloques
El Panel Frontal se constituye a base de controles e indicadores, los
cuales no son más que los terminales de entrada y salida, respectivamente, del
VI. Como controles podemos tener knobs y dials (botones rotatorios),
pulsadores y otros dispositivos de entrada. Como indicadores tenemos
gráficas, LEDs y otros visualizadores. Los controles simulan elementos de
entrada al instrumento y proporcionan datos al diagrama de bloques. Los

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 15-
indicadores simulan elementos de salida del instrumento y visualizan los datos
que el diagrama de bloques adquiere o genera.
Una vez hemos construido el panel frontal, desarrollamos el código de
programación usando funciones que controlarán los objetos del panel frontal.
Los diagramas de bloques contienen el código fuente. Los objetos del panel
frontal aparecen como terminales en el diagrama de bloques, pero no podemos
eliminarlos desde aquí. La única manera de que desaparezca un terminal es
eliminando su correspondiente objeto en el panel frontal.
2.7 Introducción de comandos de Labview, usados en el VI .
Durante la programación, muchas veces es necesario ejecutar un mismo
conjunto de sentencias un número determinado de veces, o que éstas se
repitan mientras se cumplan ciertas condiciones. También puede ocurrir que
queramos ejecutar una sentencia dependiendo de las condiciones fijadas, o
simplemente forzar que unas se ejecuten antes que otras.
Para ello se han utilizado estructuras propias de Labview, que se
describen seguidamente:
Estructuras iterativas: FOR LOOP y WHILE LOOP
For Loop:
Esta estructura se utiliza cuando se quiere repetir una secuencia un
determinado número de veces. Posee dos iconos constantes:
Terminal contador: es una N en un cuadro azul, contiene el número de
veces que se ejecutará el subdiagrama creado en el interior de la estructura. El
valor del contador se fija externamente.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 16-
Terminal de iteración: es una I dentro de un cuadro azul, indica el
número de veces que se ha ejecutado la estructura: Cero durante la primera
iteración, uno durante la segunda y así hasta N-1.
While Loop:
Esta estructura se utiliza cuando se quiere repetir una operación
mientras una determinada condición sea cierta o falsa. Al igual que For Loop
contiene dos terminales:
Terminal condicional: A él conectaremos la condición que hará que se
ejecute el subdiagrama. Labview comprobará el estado de este terminal al final
de cada iteración. Se puede configurar este terminal de manera que pare si la
condición es cierta, o bien que pare si la condición es falsa.
Terminal de iteración: Indica el número de veces que se ha ejecutado el
bucle y que, como mínimo, siempre será una I=0
Los registros de desplazamiento o shift register son variables locales,
disponibles tanto en el For Loop como en el While Loop, que permiten
transferir los valores del final de una iteración al principio de la siguiente.
Cuando un cable atraviesa los límites del Loop, aparece un el borde un
nuevo terminal llamado túnel, que hace de conexión entre cada iteración del
Loop, pudiendo guardar de esta manera no sólo el último valor de todas las
iteraciones sino también los valores intermedios en forma de matrices.
Estructuras Case y Sequence:
Este tipo de estructuras se diferencia de las iterativas en que puede
tener múltiples subdiagramas, de los cuales solamente uno es visible a la vez.
En la parte superior de cada estructura existe una pequeña ventana que
muestra el identificador del subdiagrama abierto en ese momento. A ambos
lados de esta ventana existen dos botones que decrementan o incrementan el
identificador de forma que podemos ver el resto de subdiagramas.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 17-
Case:
La estructura Case se ha utilizado para aquellas situaciones en las que
el número de alternativas disponibles sean dos o más. Según qué valor tome el
selector dentro de los n valores posibles, se ejecutará en correspondencia uno
de los n subdiagramas.
Sequence:
Esta estructura no tiene homóloga en los diferentes lenguajes
convencionales de programación, ya que en éstos las sentencias se ejecutan
en el orden de aparición, mientras que, en Labview una función se ejecuta
cuando tiene disponible todos los datos de entrada. Se produce de esta
manera una dependencia de datos que hace que la función que recibe un dato
directa o indirectamente de otra, se ejecute siempre después, creándose un
flujo de programa. Pero existen ocasiones en que esta dependencia de datos
no existe y es necesario que un subdiagrama se ejecute antes que otro; es en
estos casos cuando se utiliza la estructura Sequence para forzar un
determinado flujo de datos. Cada subdiagrama estará contenido en un marco
(frame) y estos se ejecutarán en orden de aparición.
Datos estructurados
• Matrices (Arrays):
Un matriz es una colección de datos, todos ellos del mismo tipo. Puede
tener una o más dimensiones y hasta 231 elementos por dimensión, según la
memoria disponible.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 18-
• Clusters:
Un cluster en Labview es una colección ordenada de uno o más
elementos. A diferencia de las matrices, los clusters pueden contener cualquier
combinación de tipos de datos. Se accede a sus elementos “desglosándolos”
todos a la vez, en lugar de indexarlos uno a uno. Otra diferencia con las
matrices es que los clusters tienen un tamaño fijo. Al igual que en el caso de
las matrices, los clusters no pueden tener combinación de indicadores y
controles.
Controles e indicadores string (caracteres)
Un string es una colección de caracteres ASCII. En el control de
instrumentos pasamos los datos numéricos como cadenas de caracteres, a
continuación, convertimos esas cadenas en números. Por eso se necesitan
caracteres para almacenar datos numéricos en disco.
3 RESULTADOS
El programa creado, mediante Labview, se utilizará junto a una tarjeta de
adquisición de datos, de National Instrumens (NI), para medir todos los
sensores instalados en el laboratorio de hidráulica de la E.U.I.T.A.,
indiferentemente del tipo de pruebas que se realicen en el mismo. Es una
herramienta más a la hora de asegurar la precisión de las mediciones
realizadas en el laboratorio.
3.1 Funcionamiento del programa
Antes de ejecutar el programa, hay que introducir una serie de datos
para el correcto funcionamiento de la aplicación:
1) Determinar cada cuantos segundos tiene que hacer la media de los
valores adquiridos en cada canal.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 19-
2) Especificar el nombre del archivo y ruta donde guardará los datos en
formato Excel, por defecto el programa lo guardará en el directorio raíz
c:\prueba.xls.
3) Seleccionar los canales de los sensores que queremos medir.
4) Rellenar los parámetros, pendiente y constante de calibrado de cada
sensor utilizado. Los valores introducidos en estas celdas no se guardan
una vez que se cierra el programa, a no ser que se indique al programa
que escoja esos valores como iniciales. Para realizar esta operación hay
que hacer clic con el botón derecho del ratón sobre las celdas cuyos
valores se quieren establecer como iniciales. Está acción desplegará un
menú, donde aparecerá la opción “Data Operatións”, dentro de esta
opción se selecciona “Make Current Value Default”.
Una vez puesta en marcha la aplicación, las diferencias de potencial
producidas por los sensores, son convertidos en datos digitales a través de la
tarjeta. La aplicación adquiere los datos de cada uno de los canales de la
tarjeta de forma prácticamente instantánea, (la velocidad máxima de muestreo
es de 200.000 muestras por segundo) los datos son introducidos en el
diagrama de programación.
El programa aplica a cada uno de esos datos una ecuación de
transformación, para pasar de voltaje a presión, caudal, humedad, etc., en
función del tipo sensor que estemos utilizando en cada canal. A continuación
los datos son enviados a dos lugares diferentes:
1) En el primero, los datos se muestran en una gráfica cuyo nombre es
“Valores instantáneos”. Estos datos sólo se mostrarán, pero no se
guardarán.
2) En el segundo, los datos se acumulan en matrices ordenadas, hasta que
el tiempo transcurrido es igual al establecido entre muestras. Entonces
los datos son enviados, separados según su número de canal a unos
subVI en los cuales se calcula la media de cada una de las matrices,

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 20-
obteniéndose el valor medio de las medidas adquiridas en cada canal.
Se construye una nueva matriz de dimensiones 1x16 con los valores
medios de cada canal. Mediante un subVI “selección de canales” se
eligen sólo los valores de los canales que hallan sido seleccionados al
principio de la aplicación.
Para calcular los valores de pendiente y constante, se ha usado la
aplicación creada en este proyecto. Poniendo en las celdas de “pendiente” un
1 y en las celdas de “constante” un 0, así se consigue que los valores
guardados sean valores de voltaje. Estos, junto con las medidas tomadas
manualmente de manómetros, caudalimetros, etc. permiten obtener las rectas
de calibrado. (ver apartado 3.2 calibración de los sensores).
Para parar la ejecución del programa simplemente hay que pulsar el
botón de STOP.
3.1.1 Flujo de Datos
El subVI AI Config configura las entradas analógicas especificando los
canales operativos, y seleccionando la tarjeta a utilizar. En el caso de que no
detecte ninguna tarjeta, el subVI da una señal de error que detiene la ejecución
de la aplicación.
Los datos, leídos por la tarjeta se dirigen hacia otro subVI llamado AI Simple channels, el cual construye una matriz ordenada con un valor de cada
canal leído por la tarjeta. Este subVI selecciona los canales antes de
introducirlos en la matriz de salida, por defecto, medirá siempre los 16 canales.
A continuación se representa la secuencia seguida en el proceso de
adquisición de datos y su preparación:

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 21-
Matriz inicial
1º se añade nueva fila con los nº de sensor
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15V1 V2 V3 V4 V5 V6 V7 V8 V9 V10 V11 V12 V13 V14 V15 V16
2º Se añade la pendiente y const. de cada sensor
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15V1 V2 V3 V4 V5 V6 V7 V8 V9 V10 V11 V12 V13 V14 V15 V16
P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16
C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16
Matriz completa de datos.
A partir de este punto, a la matriz inicial se le van agregando filas, hasta
que llega a una estructura Sequence. (ver figuras 6, 7, 8, 9, 10, 11).
En ésta, se seleccionan los sensores que se mostrarán posteriormente y
se le aplican las rectas de calibrado pertinentes a cada uno. Con lo que al final
de la secuencia tenemos 16 salidas de datos ya calibrados.
A la vez, mide el tiempo y el número de muestras seleccionadas por el
usuario anteriormente.
Una vez cumplidas todas las condiciones iniciales, los datos se dividen
en dos. Una copia que irá directamente a la gráfica y la otra pasará antes por
un subVI, donde se hará la media, para posteriormente ser mostrados en la
gráfica “Valores medios” y guardados en una hoja de Excel.
El ciclo comienza de nuevo hasta que el usuario decida terminar con la
ejecución del programa, pulsando el botón de STOP.
V1 V2 V3 V4 V5 V6 V7 V8 V9 V10 V11 V12 V13 V14 V15 V16
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16 C1 C2 C3 C4 C5 C6 C7 C8 C9 C10 C11 C12 C13 C14 C15 C16

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 22-
3.1.2 Descripción de funciones
Tras una visión general del funcionamiento del VI, se explicará paso a
paso cada una de las funciones que constituyen el programa.
Una vez el subVI AI Config, ha configurado la tarjeta, y antes de que
actúe el subVI AI Simple channels, el programa comprueba si el usuario ha
dado la orden de paro de la aplicación. Esto lo hace con unos controladores
boleanos (verdadero/falso), que según en la posición en que estén interrumpen
o no la aplicación.
Después de chequear el estado de los boleanos, entra en una
estructura While Loop, donde se encuentra el subVI AI Simple channels. A la
matriz de salida de este subVI se le anexa una fila nueva, con los números de
canal (todos los canales), que son producidos por una estructura For Loop,
creando de este modo una matriz de 2x16.
Seguidamente se le anexionan otras dos nuevas filas, que provienen de
los datos introducidos por el usuario. Son las pendientes y las constantes de
las rectas de calibración de los sensores. Ya se ha formado una matriz de 4x16
en la que los datos están ordenados de la siguiente manera:
Número del sensor
Valor en voltios del sensor
Pendiente de la recta de calibración
Constante de la recta de calibración
Todos estos datos se introducen en la estructura Sequence. Dentro de la Sequence, de distinguen cuatro etapas:
1º etapa:
Se forma una matriz de boleanos, en función de la selección realizada
por el usuario en el panel frontal, asignando Verdadero a los sensores con los
que se quiere medir y un False a los restantes. Esta matriz es exportada a la
siguiente etapa de la secuencia (figura 5).

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 23-
2º etapa:
Se procesan los datos y se aplican las rectas de calibrado de la siguiente
manera:
Dentro de la estructura Sequence, y de la instrucción For Loop que
realiza las siguientes operaciones:
1) Array Subset; selecciona de la matriz 4x16 los datos de voltaje,
pendiente y constante de cada sensor que pasan a otra función
llamada Case.
2) En función de la matriz de boleanos ( Verdadero, sensor a
visualizar y Falso, en caso contrario) aplica o no los factores de
calibración para obtener el valor de la medida en las unidades
deseadas (figura 6).
3º etapa:
Se transpone la matriz con los valores obtenidos en la etapa anterior
(figura 7).
4ª etapa:
Se acumulan los valores, de forma ordenada, durante el tiempo
establecido por el usuario en el panel frontal, (figura 9).
Una vez transcurrido ese tiempo, los datos acumulados se introducen en
varios subVI, en los que se calcula la media dada por la expresión (figura 13):
∑−
=
=1
0
1 n
iiXn
µ

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 24-
donde :
Xi= valores para hacer la media
n= número de repeticiones
µ= valor de la media
Las medias se agrupan en una matriz para ser mostradas en la gráfica
de “Valores medios”, pero antes de mostrase, un subVI selecciona los datos
de los sensores activos mediante los botones boleanos del inicio.
Los datos instantáneos pasan directamente a la gráfica “Valores instantáneos” del panel de control.
Otro subVI, transforma los datos resultantes en caracteres, les añade la
fecha, hora, minutos y segundos, para lo que utiliza otros subVI específicos, del
propio programa. Todos estos datos los guarda ordenadamente en un archivo
con formato de Excel. Hay que tener precaución porque el programa por
defecto siempre guarda el orden en los sensores, si por ejemplo, se
seleccionan los sensores 1-5-15, los guardará en este orden y si en cualquier
momento pulsamos otro sensor, por ejemplo el 3, el programa reordenará la
salida de datos de la siguiente manera: 1-3-5-15.
Paso1:
For Loop
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 25-
Figura 5, Introducción de datos al programa y ordenación.
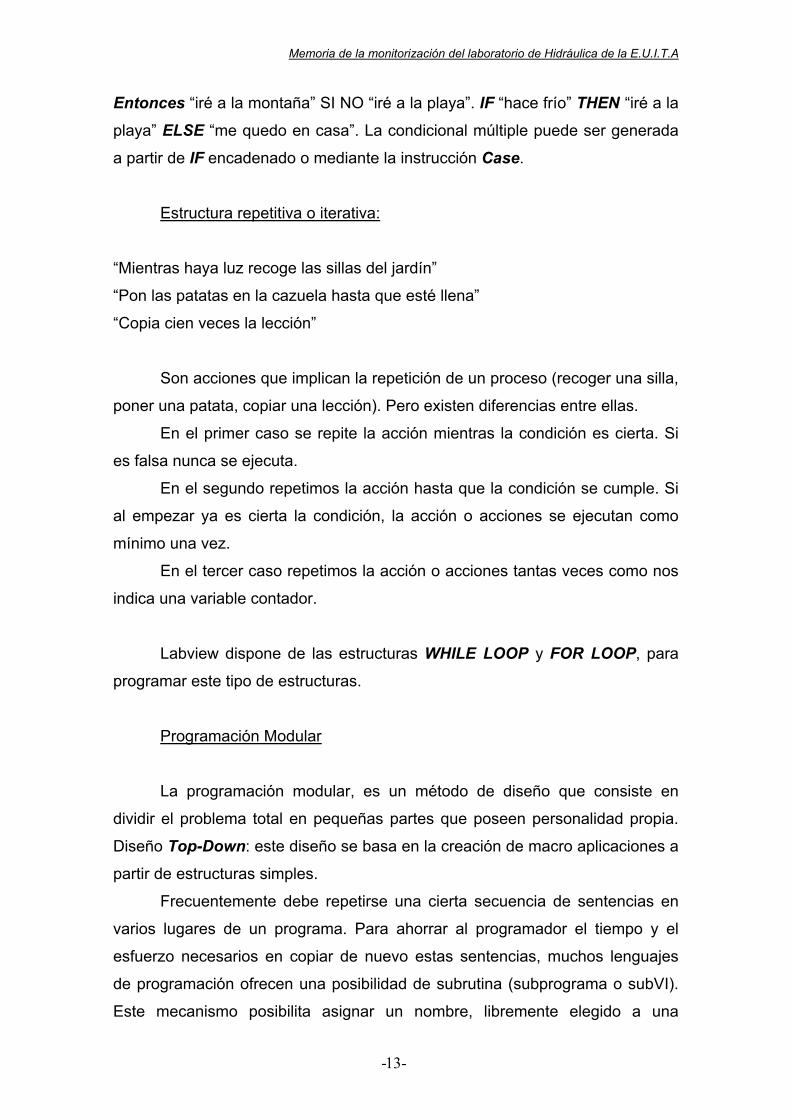
Paso 2:
Figura 6, La matriz 4x16, se introduce en la estructura Sequence. A su vez se crea la matriz de boleanos
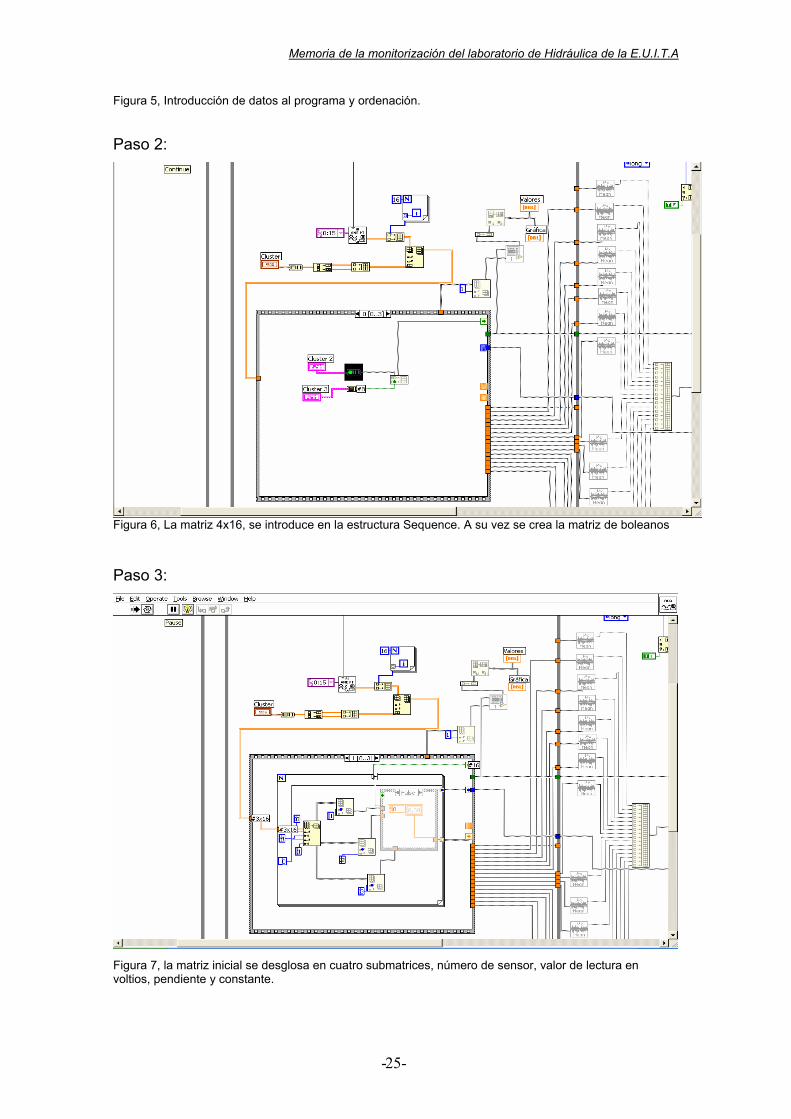
Paso 3:
Figura 7, la matriz inicial se desglosa en cuatro submatrices, número de sensor, valor de lectura en voltios, pendiente y constante.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 26-
Paso 4:
Figura 8, se aplican las formulas de calibrado, para obtener el valor de la media en las unidades deseadas.
Paso 5:
Figura 9, se hace la transpuesta de la matriz.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 27-
Paso 6:
Figura 10, se preparan los datos para hacer la media.
Paso 7:
Figura 11, salen los datos de la estructura Sequence, y esperan a que se termine el bucle.
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 28-
Paso 8:
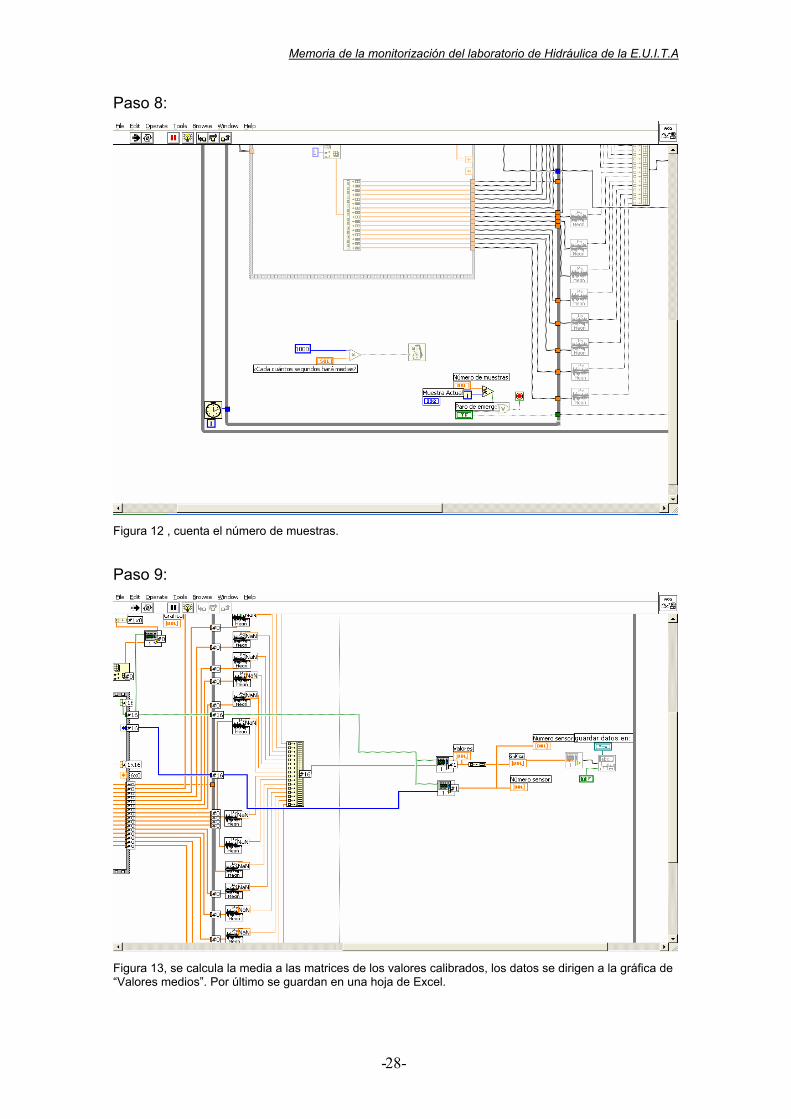
Figura 12 , cuenta el número de muestras.
Paso 9:
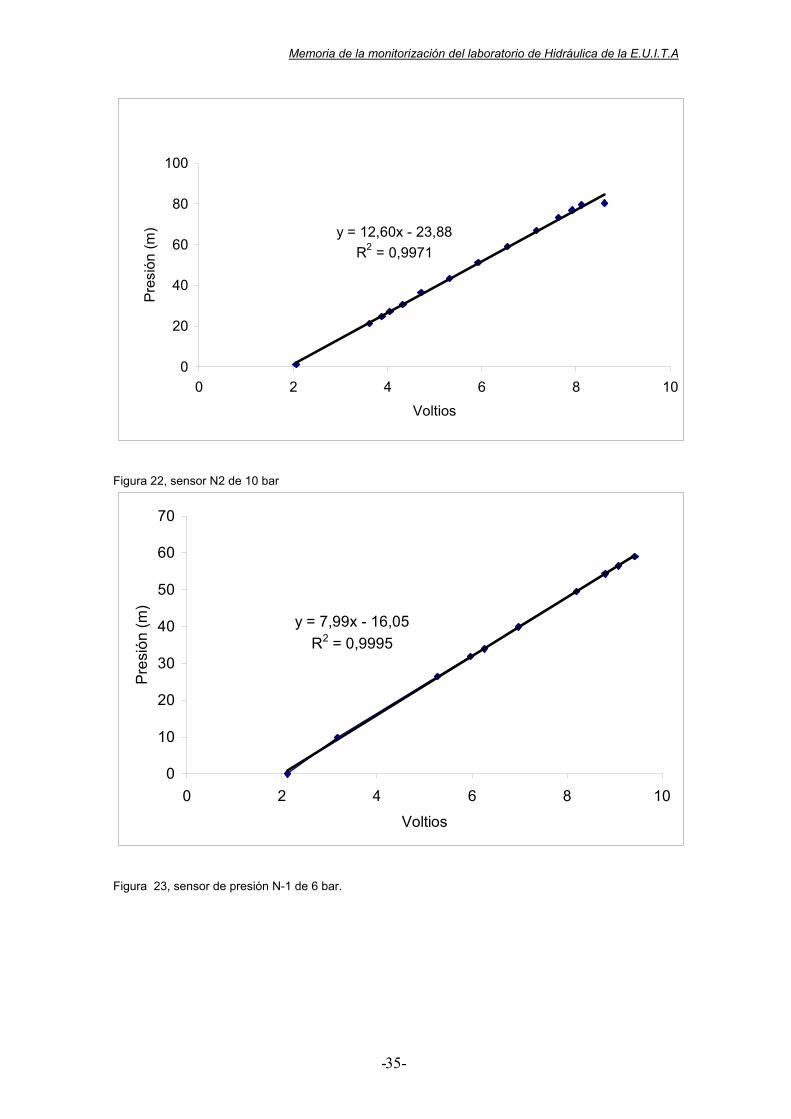
Figura 13, se calcula la media a las matrices de los valores calibrados, los datos se dirigen a la gráfica de “Valores medios”. Por último se guardan en una hoja de Excel.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 29-
3.1.3 Detalle del funcionamiento de los subVI creados para este programa en concreto:
Selección de los sensores a mostrar:
Este subVI se ha creado con la intención de elegir los datos de los
sensores a medir que se señalaron inicialmente en el panel frontal,
discriminando aquellos canales que no han sido seleccionados.
Tiene dos entradas de datos, los valores calculados (DBL) y la matriz de
boleanos (TF). La constante azul introduce una posición vacía.
El funcionamiento es el siguiente:
Cuando entra un paquete de datos se desglosa en valores simples. Al
llegar a la estructura Case, el primer valor que actúa es el boleano, el cual
indica que posición debe elegir, si es True, el sensor seleccionado se muestra
en la gráfica “Valores medios” y se guarda en Excel. Si es False, en vez del
valor, pasa un lugar vacío y se descarta para el paso siguiente.
Caso False:
Figura 13, Estructura Case dentro de una estructura For Loop, utilizada para repetir el ciclo tantas veces como datos de entrada tenga.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 30-
Caso True:
Figura 14, forma una matriz con los valores seleccionados.
Transformación de datos numéricos a cadenas de caracteres.
Ordenación y agregado de datos:
Previo a la escritura de los datos en un fichero, con estructura de hoja de
Excel, deben ser convertidos en cadenas de caracteres y además agregar a
cada paquete de datos la fecha y hora de la lectura. Esto se consigue mediante
una estructura Case con 17 casos posibles (16 sensores y el 0, cuando no hay
ninguno activado). El número del caso es seccionado por la función “Array Size”, la cual da como salida el tamaño de la matriz de entrada. El tamaño de
la matriz depende del número de sensores activados.
A continuación se muestran tres casos posibles de la función Case. Ejemplos:
En el primero muestra cuando no hay sensores activados.(figura 15).
En el segundo muestra cuando hay un sensor activado. (Figura 16).
En el tercero tenemos 7 de los 16 sensores activados. (Figura 17).

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 31-
Caso 0:
Figura 15, en el caso 0 no se registra ningún valor.
Caso1:
Figura 16, caso 1, registra fecha, hora y sólo un sensor

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 32-
Caso 7: Figura 17, caso 7, registra fecha, hora y 7 sensores.
3.2 Calibración de los sensores
Una vez desarrollada la aplicación, deberemos calibrar los sensores
para poder transformar las medidas en voltios, leídas por la tarjeta, en unidades
coherentes e inteligibles (m.c.a., l/s, etc.). Para calibrar los sensores de presión
se utilizaron manómetros de precisión tipo bourdon, de diferentes rangos de
medida instalados junto a los sensores a calibrar. Con la aplicación en
funcionamiento, se tomaron los valores proporcionados por la salida del
ordenador (voltios, sin aplicar ningún tipo de transformación), junto con los
valores visualizados en los manómetros. Las figuras 21, 22 ,23 y 24 muestran
las rectas de calibrado de cuatro de los sensores de presión. Como puede
observarse en ellas, el ajuste a la ecuación de una recta es muy bueno (R>
0,997). Los valores de pendiente y constante obtenidos en la calibración de
cada sensor, son los datos que se introdujeron en el panel de frontal y serán
utilizados por el programa para expresar las medidas tomadas por cada sensor
en las unidades deseadas (m.c.a. en el caso de los sensores de presión), a
partir de las diferencias de potencial leídas por la tarjeta.
caracteres datos

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 33-
La figura 18, muestra un sensor instalado junto al manómetro utilizado
para su calibración. Un cable de dos hilos apantallado lleva la señal a la tarjeta.
Figura 18, sensor de presión junto al manómetro tipo bourdon utilizado para su calibración El sensor mostrado en la fotografía, ha sido calibrado para mediciones de 0 a
10 bar, con una señal analógica de 4-20 mA.
La figura 19, muestra la regleta donde se conectan los sensores que a
su vez, se conecta directamente con la tarjeta del ordenador, mediante un
cable especial situado en la parte superior de la foto.
Figura 19, regleta de conexionado de los sensores. También se observa la instalación de las resistencias, para la
transformación de intensidad en voltaje.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 34-
En la figura 20 se observa la tarjeta de adquisición de datos, conectada
en la ranura correspondiente de la placa base del ordenador.
Figura 20, tarjeta de adquisición de datos conectada en una ranura PCI.
y = 20,97x - 40,54R2 = 0,9998
0
20
40
60
80
100
0 1 2 3 4 5 6 7Voltios
Pre
sión
(m)
Figura 21, sensor de presión N 1 de 10 bar
Tarjeta de Adquisición de datos, Lugar de conexionado
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 35-
y = 12,60x - 23,88R2 = 0,9971
0
20
40
60
80
100
0 2 4 6 8 10Voltios
Pre
sión
(m)
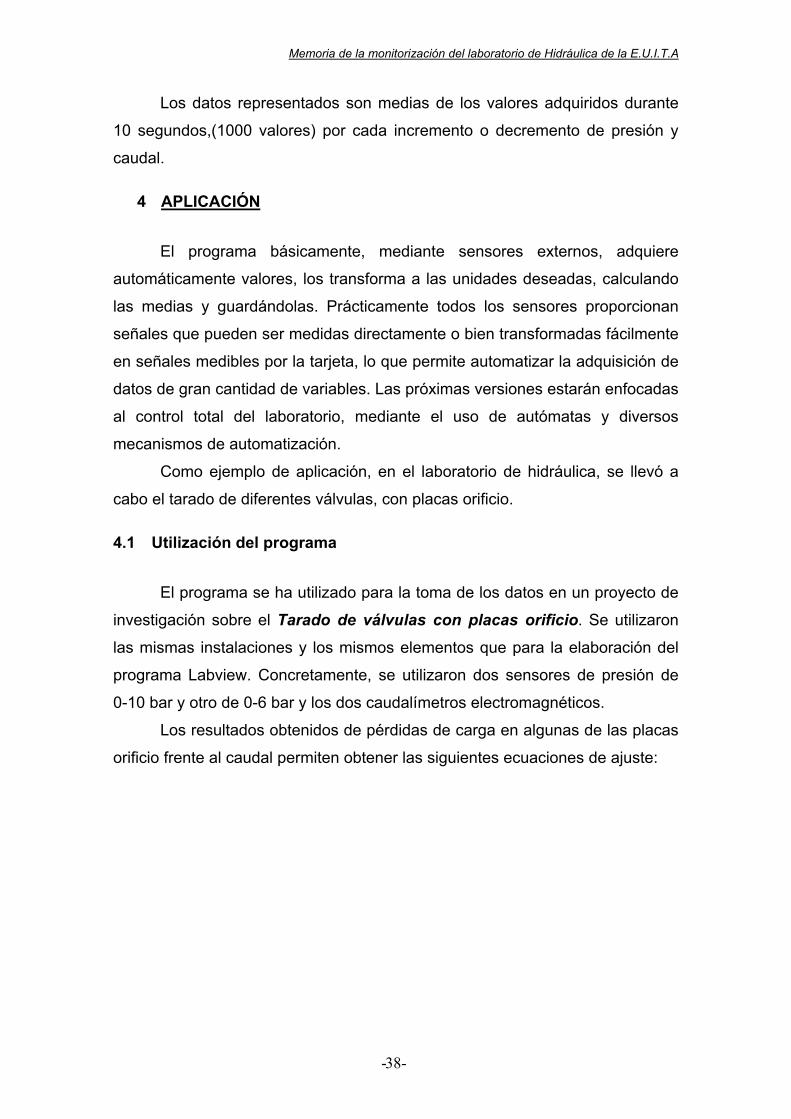
Figura 22, sensor N2 de 10 bar
y = 7,99x - 16,05R2 = 0,9995
0
10
20
30
40
50
60
70
0 2 4 6 8 10
Voltios
Pre
sión
(m)
Figura 23, sensor de presión N-1 de 6 bar.

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 36-
y = 8,08x - 15,91R2 = 0,9987
0
20
40
60
80
0 2 4 6 8 10
Voltios
Pres
ión
(m)
Figura 24, sensor N-2 de 0-6 bar
La figura 26 y 27 muestra la calibración de los caudalímetros
electromagnéticos. Se observa también en este caso, que el ajuste de los
valores a la ecuación de una recta es muy bueno en ambos casos R2= 1. Igual
que en el caso de los sensores de presión, la pendiente y la constante
obtenidos, se introducen antes de ejecutar la aplicación en el panel frontal, y
serán utilizados por la misma para transformar los voltios medidos por la tarjeta
en caudal (l/s).

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 37-
y = 3,89x - 3,90R2 = 1
-202468
101214161820
0 1 2 3 4 5 6Voltios
Cau
dal (
l/s)
Figura 25, caudalímetro electromagnético. N-1
y = 2,48x - 2,47R2 = 1
00,5
11,5
22,5
33,5
44,5
5
0 0,5 1 1,5 2 2,5 3
Voltios
Cau
dal (
l/s)
Figura 26, caudalímetro electromagnético N-2
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 38-
Los datos representados son medias de los valores adquiridos durante
10 segundos,(1000 valores) por cada incremento o decremento de presión y
caudal.
4 APLICACIÓN
El programa básicamente, mediante sensores externos, adquiere
automáticamente valores, los transforma a las unidades deseadas, calculando
las medias y guardándolas. Prácticamente todos los sensores proporcionan
señales que pueden ser medidas directamente o bien transformadas fácilmente
en señales medibles por la tarjeta, lo que permite automatizar la adquisición de
datos de gran cantidad de variables. Las próximas versiones estarán enfocadas
al control total del laboratorio, mediante el uso de autómatas y diversos
mecanismos de automatización.
Como ejemplo de aplicación, en el laboratorio de hidráulica, se llevó a
cabo el tarado de diferentes válvulas, con placas orificio.
4.1 Utilización del programa
El programa se ha utilizado para la toma de los datos en un proyecto de
investigación sobre el Tarado de válvulas con placas orificio. Se utilizaron
las mismas instalaciones y los mismos elementos que para la elaboración del
programa Labview. Concretamente, se utilizaron dos sensores de presión de
0-10 bar y otro de 0-6 bar y los dos caudalímetros electromagnéticos.
Los resultados obtenidos de pérdidas de carga en algunas de las placas
orificio frente al caudal permiten obtener las siguientes ecuaciones de ajuste:

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 39-
Ecuación de pérdidas de carga:
9932.0
85,242
2
9651,2
=
⋅=
R
QH
H = pérdidas de carga (m.c.a.)
Q = caudal en l/s
0
10
20
30
40
50
60
70
0,5 0,52 0,54 0,56 0,58 0,6 0,62 0,64 0,66
Caudal (l/s)
Pérd
idas
de
carg
a (m
.c.a
.)
Figura 27, Pérdidas de carga en una placa orificio 5mm. Válvula ¾
Ecuación de pérdidas de carga:
9984.0
968,17
2
1507,2
=
⋅=
R
QH
H = pérdidas de carga (m.c.a.)
Q = caudal en l/s
0
10
20
30
40
50
60
70
0 0,5 1 1,5 2
Caudal (l/s)
Pérd
idas
de
carg
a (m
.c.a
.)
Figura 28, Pérdidas de carga en una placa orificio 9mm. Válvula 1 ½

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 40-
Ecuación de pérdidas de carga:
9976.0
5145,0
2
7851,1
=
⋅=
R
QH
H = pérdidas de carga (m.c.a.)
Q = caudal en l/s
0
10
20
30
40
50
60
0 5 10 15 20 25
Caudal (l/s)
Pérd
idas
de
carg
a (m
.c.a
.)
Figura 29, Pérdidas de carga en una placa orificio 30mm. Válvula 3”
Como puede apreciarse en las figuras, los valores obtenidos se adecuan
extraordinariamente bien a las gráficas. En este trabajo se concluyó que los
valores obtenidos mediante el programa, se adaptan a los valores de la
realidad y permiten interpretar fácilmente la evolución del comportamiento de
las válvulas con la variación del caudal. Todo esto al estar informatizado, evita
los errores humanos. Además, sería imposible la toma de datos de tantos
factores a la vez y tanta cantidad en un tiempo tan reducido.
El tiempo de toma de datos para este proyecto se ha reducido
enormemente, además de que los valores obtenidos son medias de tantos
valores como se desee, mejorando la precisión y el rigor del trabajo.
Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 41-
5 CONCLUSIONES
La aplicación de la herramienta desarrollada, en los ensayos realizados
en el laboratorio de hidráulica del departamento de Ingeniería Rural, redujo
tiempo en el ensayo, mejoró la precisión y el rigor en el trabajo y demostró que
es fácilmente adaptable a cualquier instalación, lo que proporciona una gran
versatilidad. Además, supone una gran mejora de los métodos de adquisición
de datos hasta ahora disponibles ya que permite:
• Tomar gran cantidad de datos a una enorme velocidad (200.000 muestras
por segundo), lo que posibilita visualizar fenómenos transitorios rápidos con
gran precisión.
• Utilizar la lectura de cualquier tipo de sensor, ya que es totalmente
configurable.
• Mostrar la medida de cualquier parámetro para el que exista sensor, en
las unidades deseadas, con la sola introducción en el panel frontal de sus
valores de pendiente y constante de calibración.
• Medir hasta con 16 sensores al mismo tiempo, lo que permite
correlacionar las diferentes medidas entre si, así como relacionarlas
directamente con otros factores, de forma fácil y fiable.
• Tomar datos de forma cómoda, automática, precisa y sin intervención del
factor humano, lo que proporciona independencia, ausencia de error humano
en los resultados de los ensayos, y la imposibilidad de manipulación de
estos.
Por tanto, los ensayos serán rápidos, repetibles, fiables e
independientes.
En Valencia a 29 de noviembre de 2002
David de la Torre Rausell
Ingeniero Técnico Agrícola en Mecanización Construcciones Rurales

Memoria de la monitorización del laboratorio de Hidráulica de la E.U.I.T.A
- 42-