







Idiomas
Páginas
Jurídico

ESTÁTICA APLICADA
Prof. Julio René Méndez Vásquez
Ingeniero Civil en Obras Civiles

UNIDAD DOS
ESTÁTICA APLICADA
Prof. Julio René Méndez Vásquez
Ingeniero Civil en Obras Civiles

Escalares y vectores
Escalar
Es una cantidad caracterizada por un número positivo o negativo. La
masa, el volumen y la longitud son propiedades que se caracterizan
por un escalar.
Vector
Es una cantidad que además de magnitud, tienen propiedades de
dirección y sentido. La posición, la fuerza y el momento son
cantidades vectoriales, es decir, están caracterizadas por magnitud,
dirección y sentido.

Fuerzas en un Plano
El vector fuerza ( ), queda caracterizado por su punto
de aplicación, módulo, dirección y sentido (recta
soporte).
F
30º
A

Resultante de Dos Fuerzas
Se tienen 2 fuerzas (N y P) actuando sobre una partícula A.
Estas fuerzas pueden sustituirse por una sola fuerza resultante (R, suma de N + P), mediante la construcción de un paralelogramo de lados N y P, donde la diagonal que pasa por A es la suma de N + P.
Regla del Paralelogramo
A
N
P A
N
P
Regla del Triángulo
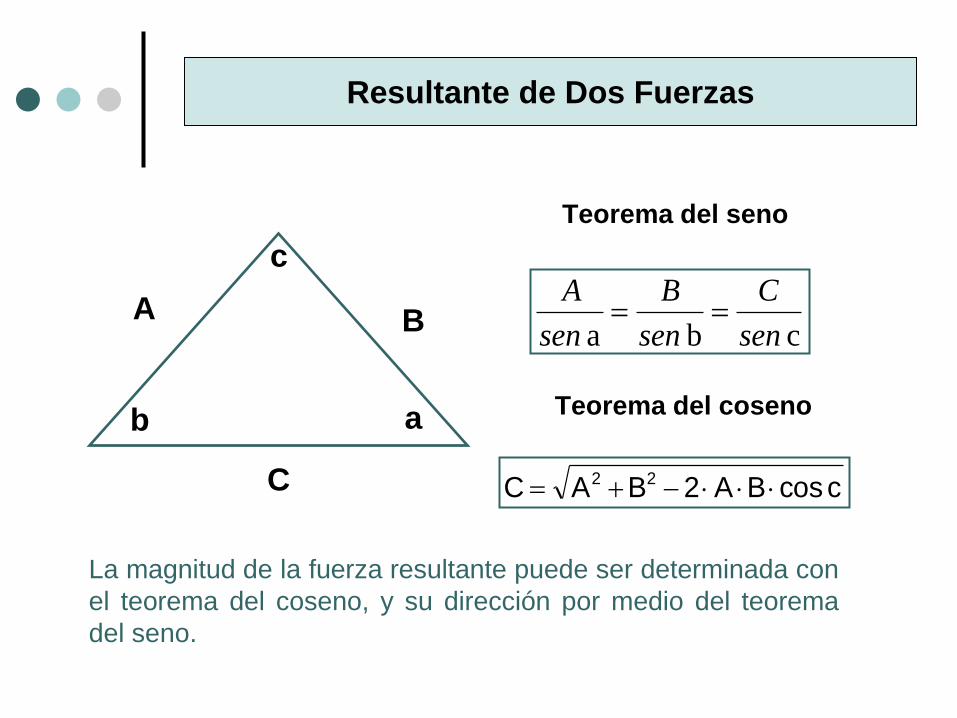
Resultante de Dos Fuerzas
Teorema del seno
Teorema del coseno
A B
C
a b
c
c b a sen
C
sen
B
sen
A
c cosBA2BAC 22
La magnitud de la fuerza resultante puede ser determinada con
el teorema del coseno, y su dirección por medio del teorema
del seno.
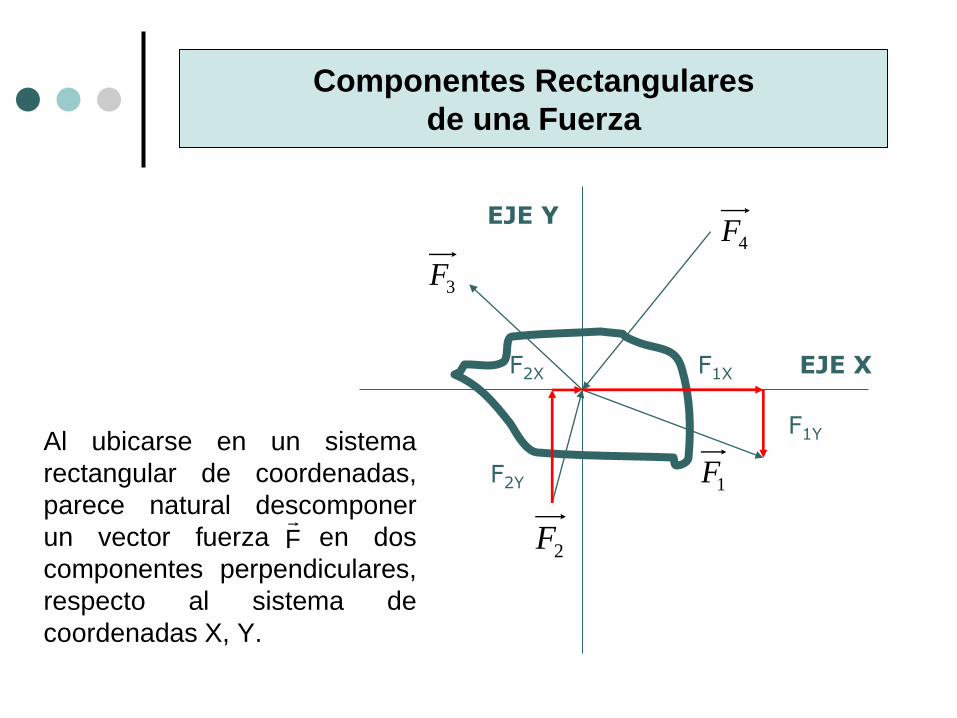
Componentes Rectangulares
de una Fuerza
Al ubicarse en un sistema
rectangular de coordenadas,
parece natural descomponer
un vector fuerza en dos
componentes perpendiculares,
respecto al sistema de
coordenadas X, Y.
F
2F
1F
F1X
F1Y
F2X
F2Y
EJE X
EJE Y 4F
3F

Suma de un sistema de fuerzas coplanares
Cuando se requiera obtener la resultante de más de 2 fuerzas, es más
simple encontrar las componentes de cada fuerza a lo largo de ejes
especificados (por ej. eje X y eje Y), sumar las componentes
algebraicamente y formar la resultante.
EJE X
2F
1F
F1X
F1Y
F2X
F2Y
EJE Y
4F
3F
555212121 FFFFFFFFF YXYYXX

Vectores Unitarios y Componentes Escalares
F1X = F1x i F1Y = F1Y(- j )
2F
1F
F1X
F1Y
F2X
F2Y
EJE X
EJE Y 4F
3F
θ
Es posible representar las componentes de una fuerza en
términos de vectores unitarios cartesianos, notación de fácil
manejo algebraico, sobretodo cuando se trata de problemas
tridimensionales.
jFiFF Y1X11
q
q
sen
cos
1 Y 1
1 X 1
- F F
F F
Los vectores unitarios cartesianos i, j y k,
se utilizan para designar las direcciones
X, Y y Z, respectivamente.
Vectores Unitarios y Componentes Escalares
2F
1F
F1X
F1Y
F2X
F2Y
EJE X
EJE Y 4F
3F
θ
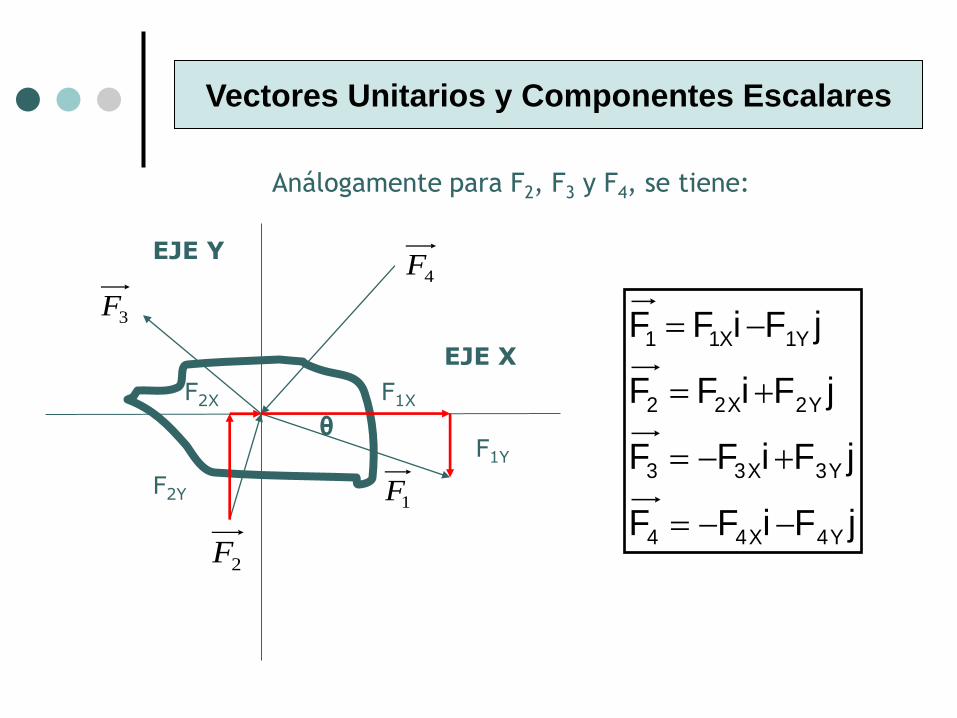
Análogamente para F2, F3 y F4, se tiene:
jFiFF
jFiFF
jFiFF
jFiFF
Y4X44
Y3X33
Y2X22
Y1X11
Vectores Unitarios y Componentes Escalares
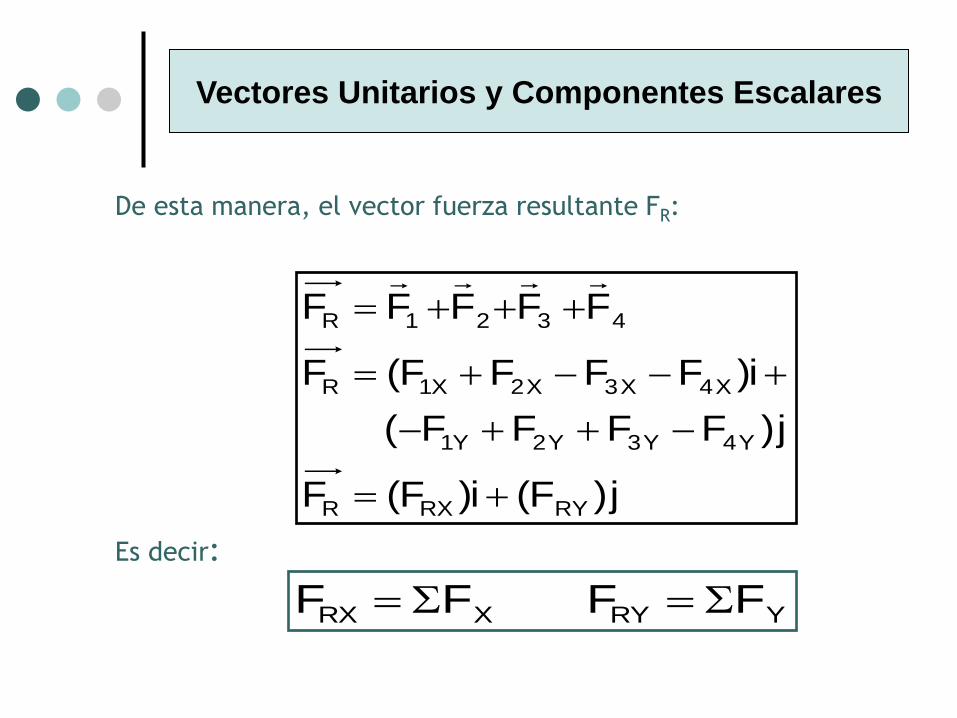
De esta manera, el vector fuerza resultante FR:
j)F(i)F(F
j)FFFF(
i)FFFF(F
FFFFF
RYRXR
Y4Y3Y2Y1
X4X3X2X1R
4321R
Es decir:
YRYXRX FF FF

Vectores Unitarios y Componentes Escalares
Una vez encontradas las componentes de la fuerza resultante, se puede encontrar la magnitud de esta fuerza aplicando el teorema de Pitágoras, es decir:
2
RY
2
RXR FFF
Mientras que su ángulo director (especifica la orientación
de la fuerza) queda determinado por:
RX
RY1
F
Ftanq
Sistemas Equivalentes de Fuerzas
• Un cuerpo (sólido rígido) deberá tratarse siempre como una combinación de un gran número de partículas.
• El sólido rígido será aquel cuerpo que no sufre deformaciones, o sufre deformaciones tan pequeñas que no afectan su condición de equilibrio.
• Las fuerzas que solicitan a un sólido rígido, se clasificarán en fuerzas
externas y fuerzas internas.

Las fuerzas externas constituyen la acción de otros cuerpos sobre el sólido rígido estudiado.
Las fuerzas externas serán las responsables del comportamiento externo del cuerpo rígido, es decir, hará que el sólido se mueva o permanezca en reposo.
Las fuerzas internas, son aquellas que mantienen unidas entre sí las partículas que
componen el sólido rígido.
Si el cuerpo rígido está compuesto de varias partes, las fuerzas internas
son las encargadas de mantener unidas las diferentes secciones del
cuerpo rígido.
Sistemas Equivalentes de Fuerzas
Fuerzas externas e internas

Sistemas Equivalentes de Fuerzas
Cualquier fuerza externa que actúe sobre un cuerpo rígido, es capaz de sacarlo de su estado de reposo, si es que no se opone otra fuerza.
Principio de Transmisibilidad. La condición de reposo o movimiento uniforme de un cuerpo rígido, se mantendrán sin alteración si una fuerza F que actúa en un punto determinado del cuerpo, se reemplaza por otra fuerza F’ de igual módulo, dirección y sentido, pero que se aplica en un punto distinto, siempre y cuando las fuerzas tengan la misma recta soporte.
F
=
F’

Principio de transmisibilidad
Las dos fuerzas F y F’ producirán el mismo efecto en el cuerpo rígido, es decir, F y F’ son fuerzas equivalentes.
Cuando se aplica una fuerza a un cuerpo rígido, no importará el punto de aplicación de esta fuerza, siempre y cuando no se modifique su recta soporte.
F
=
F’
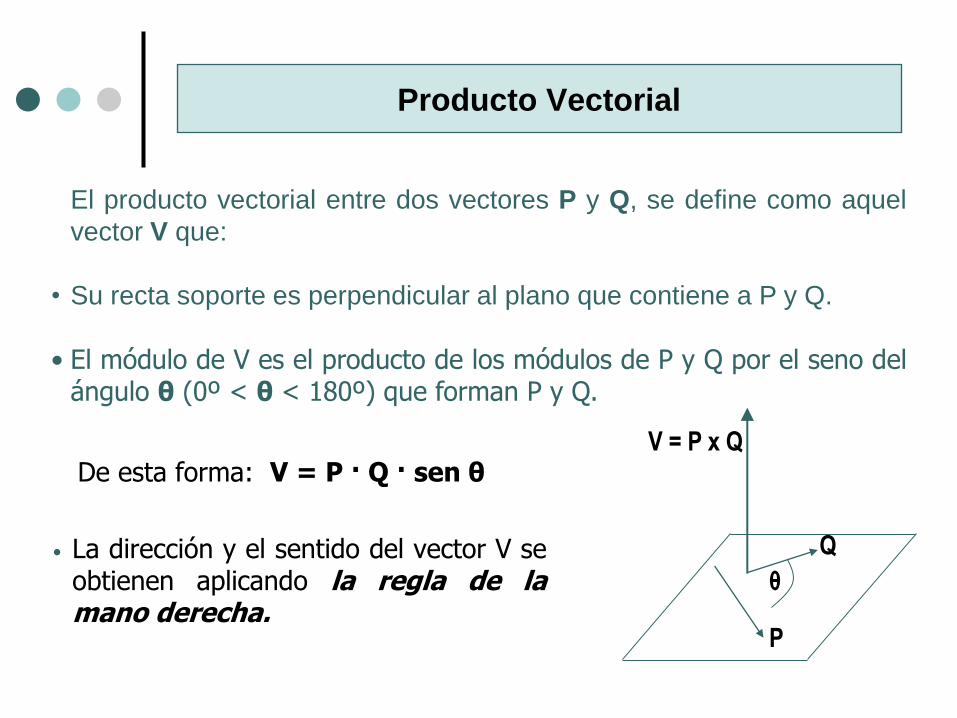
Producto Vectorial
De esta forma: V = P · Q · sen θ
• La dirección y el sentido del vector V se obtienen aplicando la regla de la mano derecha.
Q
P
V = P x Q
θ
El producto vectorial entre dos vectores P y Q, se define como aquel
vector V que:
• Su recta soporte es perpendicular al plano que contiene a P y Q.
• El módulo de V es el producto de los módulos de P y Q por el seno del ángulo θ (0º < θ < 180º) que forman P y Q.

Si P y Q tienen la misma dirección (es decir, son paralelos) el
producto vectorial es nulo.
El producto entre dos vectores no es conmutativo. Se cumple que:
Q x P = - ( P x Q )
El producto vectorial es distributivo sobre la suma, esto es:
Q x ( P1 + P2 ) = Q x P1 + Q x P2
En el producto vectorial de tres vectores, no se cumple la
propiedad asociativa, es decir:
( Q x P ) x R ≠ Q x ( P x R )
Producto Vectorial Propiedades
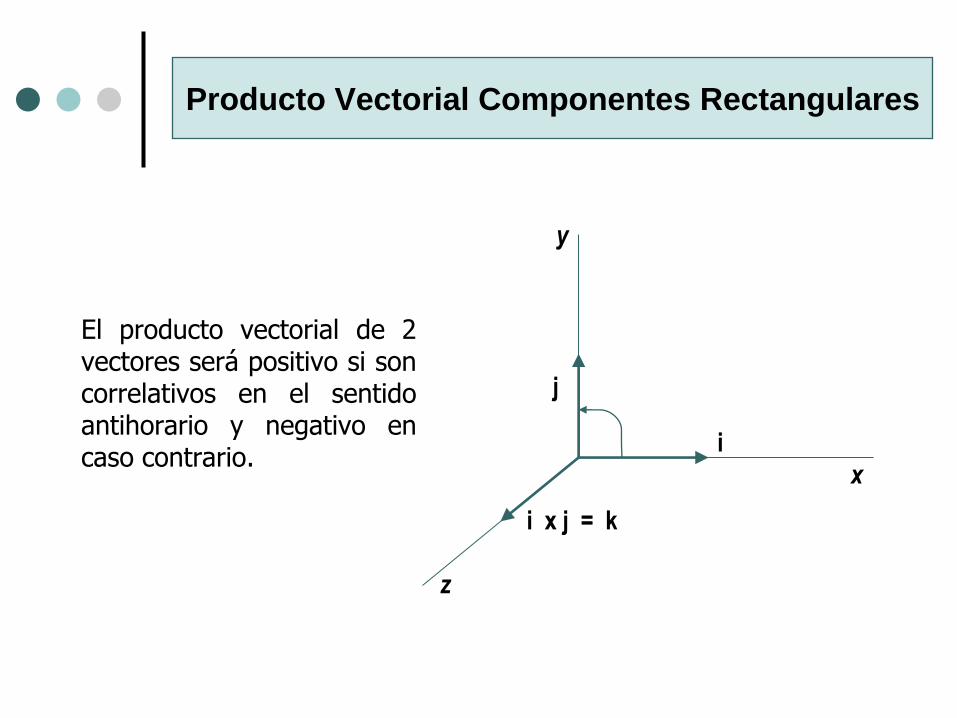
Producto Vectorial Componentes Rectangulares
El producto vectorial de 2 vectores será positivo si son correlativos en el sentido antihorario y negativo en caso contrario.
x
y
z
i
j
i x j = k
Resumen
• La resultante de varias fuerzas coplanares puede ser determinada
fácilmente si se establece un sistema de ejes coordenados, y las
fuerzas se resuelven a lo largo de los ejes.
• La dirección de cada fuerza está especificada por el ángulo que forma
su línea de acción con uno de los ejes.
• La orientación de los ejes puede ser arbitraria, sus direcciones
positivas deben ser especificadas mediante los vectores unitarios
i, j, k.
• Las componentes de la fuerza resultante, se determinan por la suma
algebraica de las componentes de todas las fuerzas coplanares.
• La magnitud de la fuerza resultante se determina mediante el teorema
de Pitágoras. Cuando las componentes son trazadas sobre los ejes X
e Y, la dirección puede ser determinada por trigonometría.

Momento de una fuerza respecto a un punto
Se define el momento de F respecto de O, como el producto
vectorial de r y F:
M o = r x F
M o = r · F · sen θ = F · d
El momento M0, será siempre perpendicular al plano definido por el
origen 0 y la recta soporte de la fuerza F.
O
r
d
θ
F M o
A

Momento de una fuerza respecto a un punto
La tendencia de un fuerza de hacer girar un sólido rígido alrededor de un eje fijo perpendicular a la fuerza, depende de la distancia de la fuerza F a dicho eje, y de la magnitud de F.
El módulo de M0, mide la tendencia de la fuerza F a imprimir al cuerpo rígido una rotación alrededor de un eje dirigido según M 0.
En el SI de unidades, el momento de una fuerza se expresará en newton · metro ( N · m ).
El momento M 0 de un a fuerza respecto punto, no depende de la posición real del punto de aplicación de la fuerza sobre su recta soporte.

Momento de una fuerza respecto a un punto
Dos fuerzas F y F’ son equivalentes si tienen el mismo módulo,
la misma dirección, sentido y la misma recta soporte (principio
de transmisibilidad).
Ahora diremos que dos fuerzas son equivalentes, si y solo sí
son iguales y sus momentos respecto a un punto dado O
también son iguales:

Teorema de Varignon.
La propiedad distributiva del producto vectorial, se aplica
para determinar el momento resultante de varias fuerzas
concurrentes, es decir:
r x ( F1 + F2 + ……. + Fn ) = r x F1 + r x F2 + …… + r x Fn)
“El momento respecto a un punto O de la resultante de varias fuerzas concurrentes, es igual a la suma de los momentos de las distintas fuerzas respecto al mismo punto O.”
Momento de una fuerza respecto a un punto
Momento de un Par Sistemas Equivalentes
Cuando un cuerpo es solicitado por una sistema de fuerzas y
momentos, se puede simplificar a una sola fuerza resultante y un
momento.
La condición fundamental es que este nuevo “sistema equivalente”
(fuerza y momento) produzca el mismo efecto externo de traslación y
rotación del cuerpo.
Existen dos casos para el análisis:
1. Cuando actúa una sola fuerza sobre un punto específico del cuerpo
(sobre la línea de acción de la fuerza).
2. Cuando la fuerza está aplicada en un punto cualquiera.
Sistemas Equivalentes
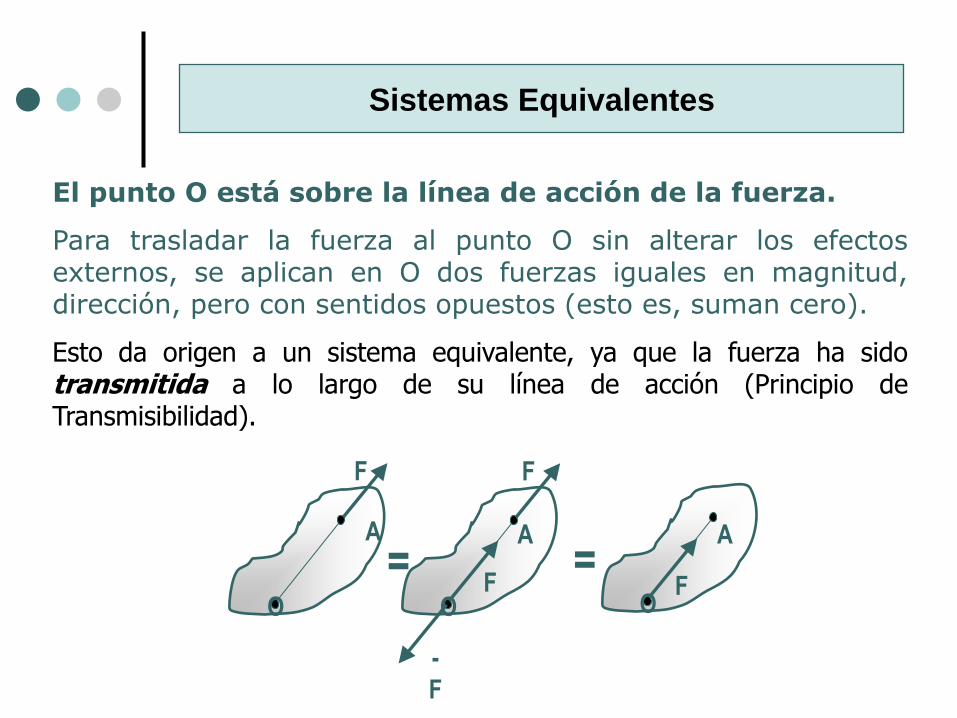
El punto O está sobre la línea de acción de la fuerza.
Para trasladar la fuerza al punto O sin alterar los efectos externos, se aplican en O dos fuerzas iguales en magnitud, dirección, pero con sentidos opuestos (esto es, suman cero).
Esto da origen a un sistema equivalente, ya que la fuerza ha sido transmitida a lo largo de su línea de acción (Principio de Transmisibilidad).
F
= = O
A
F
O
-
F
F
A
O F
A

Sistemas Equivalentes
El punto O está sobre la línea de acción de la fuerza.
Los efectos externos (movimiento o fuerzas necesarias para mantener el cuerpo en reposo), permanecen sin cambio al desplazarse F.
Los efectos internos si cambian: cuando F actúa en A, las fuerzas internas son de alta intensidad alrededor de A, disminuyendo cuando la fuerza F se aleja de A.
F
= =
O
A
F
O
- F
F
A
O F
A
Sistemas Equivalentes
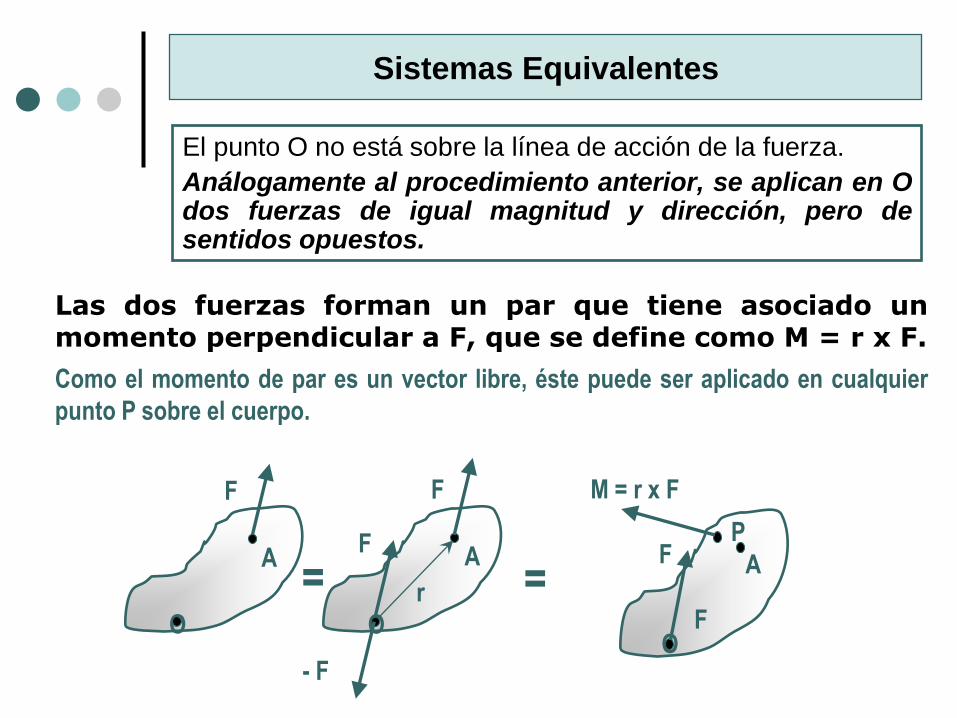
El punto O no está sobre la línea de acción de la fuerza.
Análogamente al procedimiento anterior, se aplican en O dos fuerzas de igual magnitud y dirección, pero de sentidos opuestos.
F
= = O
A
F
O
- F
F A
r
M = r x F
O F
A F P
Las dos fuerzas forman un par que tiene asociado un momento perpendicular a F, que se define como M = r x F. Como el momento de par es un vector libre, éste puede ser aplicado en cualquier
punto P sobre el cuerpo.

Sistemas Equivalentes
Corolario
Al aplicar el Principio de Transmisibilidad cuando el punto sobre el
cuerpo esté en la línea de acción de la fuerza, deslizar la fuerza
sobre la línea de acción hasta aplicarla en el punto.
Cuando el punto no esté sobre la línea de acción de la fuerza,
trasladar la fuerza al punto y sumar un momento de par en cualquier
lugar del cuerpo.
Este momento de par se calcula respecto al punto.
Siguiendo estas simples indicaciones, se producirán efectos externos
equivalentes sobre el cuerpo.

Reducción de un sistema de fuerzas
a una fuerza y un par (momento)
Cuando un cuerpo rígido es solicitado por un sistema de fuerzas y
momentos, el análisis de los efectos externos es más sencillo si se
simplifica a una sola fuerza y momento.
Efectuando un procedimiento análogo al anterior, cada fuerza es
trasladada al punto O y se calcula el momento respectivo.
Así, el sistema original, se simplifica a una fuerza resultante FR (suma
vectorial de las fuerzas F1 y F2) y a un momento resultante (suma
vectorial de MA, M1 y M2.
= O
F2 M A
F 1
O
F 2
A
M A r1 r2
F1
M 2 = r 2 x F2
M 1 = r 1 x F1
O
FR = F1 + F2
θ
M R = MA+ M 1 + M 2
=

Reducción de un sistema de fuerzas
a una fuerza y un par (momento)
Este método de simplificación o reducción, puede ser generalizado de la siguiente manera:
F R = Σ F i
M AO = Σ M A + Σ M O
Es decir, la fuerza resultante del sistema es equivalente a la suma de
todas las fuerzas.
Análogamente, el momento resultante del sistemas equivalente a la
suma de todos los momentos aplicados en el cuerpo, más los
momentos respecto de O de todas las fuerzas actuantes.

Reducción de un Sistema de Fuerzas
a una Fuerza y un Par (Momento)
Además, si el sistema de fuerzas se encuentra en el plano x – y,
y cualquiera de los momentos son perpendiculares a este plano
(en el eje z), las ecuaciones se reducen a las siguientes tres
expresiones escalares:
F R X = Σ F X
F R Y = Σ F Y
M A O = Σ M A + Σ M O

Reducción de un Sistema de Fuerzas a una
Fuerza y un Par (Momento)
Procedimiento de análisis
1. Se establece el sistema de coordenadas.
Para la suma de fuerzas.
2. Si el sistema de fuerzas es coplanar, se suma cada fuerza en sus
componentes x e y.
3. En tres dimensiones, representar cada fuerza como un vector
cartesiano antes de sumarlas.
Para la suma de momentos.
4. Cuando el sistema de fuerzas es coplanar, determinar los
momentos de cada fuerza y luego sumarlos.
5. En tres dimensiones, utilizar el producto cruz.

Reducir el sistema de fuerzas de la figura, a una fuerza y
un momento que pasen por el punto A.

Reducir el sistema de
fuerzas de la figura, a
una fuerza y un
momento en el origen
del sistema de
coordenadas.
Top Related