







Idiomas
Páginas
Jurídico

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 1/14
OSNOVE MATRIČNE ANALIZE
KONSTRUKCIJA
dr Mira Petronijević

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 2/14
Matrič na analiza konstrukcija 1
MATRIČNA ANALIZA KONSTRUKCIJA
1. Uvod
Pojavom računara metoda deformacije je doživela potpunu afirmaciju. Osnovna ideja postupka je da se konstrukcija može modelirati određenim brojem elemenata (štapova),međusobno vezanih u č vorovima. U svakom elementu sile i pomernja unitar elementa semogu iskazati u funkciji od pomeranja krajnjih tačaka elementa (6 osnovnih deformacijskinepoznatih veličina štapa). Nepoznate komponente pomeranja čvorova nosača određuju se izuslova ravnoteže čvorova sistema. Ceo postupak je progodan za programiranje i danas jeuobičajen u proračunu konstrukcija.
Na slikama 1 i 2 su prikazani modeli punog i rešetkastog nosača u ravni. Brojevima suošnačeni čvorovi nosača, dok su brojevima u kružiću označeni elementi nosača, tj. štapovi.
1 2 3 4 5 6 7 8
9 10
Slika 1. Pun nosač broj elemenata 9, broj č vorova: 10
i m j
Slika 2. Rešetkast nosač
1 2 3 4 5 6 7
8 9
č vorovi
štapovi

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 3/14
Matrič na analiza konstrukcija 2
2. Rešetka u ravni
Osnovni element rešetkastog nosača je prost štap m, koji je u č vorovima i i j zglavkasto vezansa ostalim delovima nosača (sl.2). Štap je izložen aksijalnom naprezanju.
Na krajevima štapa javljaju samo aksijalne sile F 1, F 2 i odgovarajuća pomeranja q1, q2 u pravcu ose štapa (slika 3). Dakle štap ima dva stepena slobode pomeranja.
2.1 Element rešetke. Matrica krutosti štapa
Neka je F vektor sila na krajevima štapa, a q vektor pomeranja krajeva štapa:
1
2
F
F
=
F 2 1
2 2
q u
q u
= =
q (1)
1 2
F 1 , q1 F 2 , q2 l
Slika 3. Aksijalno napregnut štap
Veza između vektora sila i pomeranja štapa se može lako izvesti polazeći od osnovnih jednačina teorije štapa. Promena dužine tetive štapa ∆l je jednaka razlici komponenata pomeranja krajeva štapa u pravcu ose štapa:
12 qql −=∆ (2)
Dilatacija ose štapa je jednaka promeni dužine po jedinici dužine, tj.
l
l ∆=ε (3)
Napon, tj. normalna sila se određuje direktno iz dilatacije:
)( 12 qql
EF EF F N −=== ε σ (4)
N N
F 1 F 2
Slika 4.
Iz jednačine (4) se dobijaju sile na krajevima štapa F 1 i F 2 (Slika 4):
)( 211 qql
EF N F −=−= )( 212 qq
l
EF N F +−== (5)
Ako jednačine (5) napišemo u matričnom obliku, dobija se:
8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 4/14
Matrič na analiza konstrukcija 3
1 1
2 2
1 1
1 1
F q EF
F ql
− = −
(6)
tj.=F Kq (7)
gde su F i q vektor sila i vektor pomeranja krajeva štapa, dok je K matrica krutosti štapakonstantnog poprečnog preseka
11 12
21 22
1 1
1 1
k k EF
k k l
− = = −
K (8)
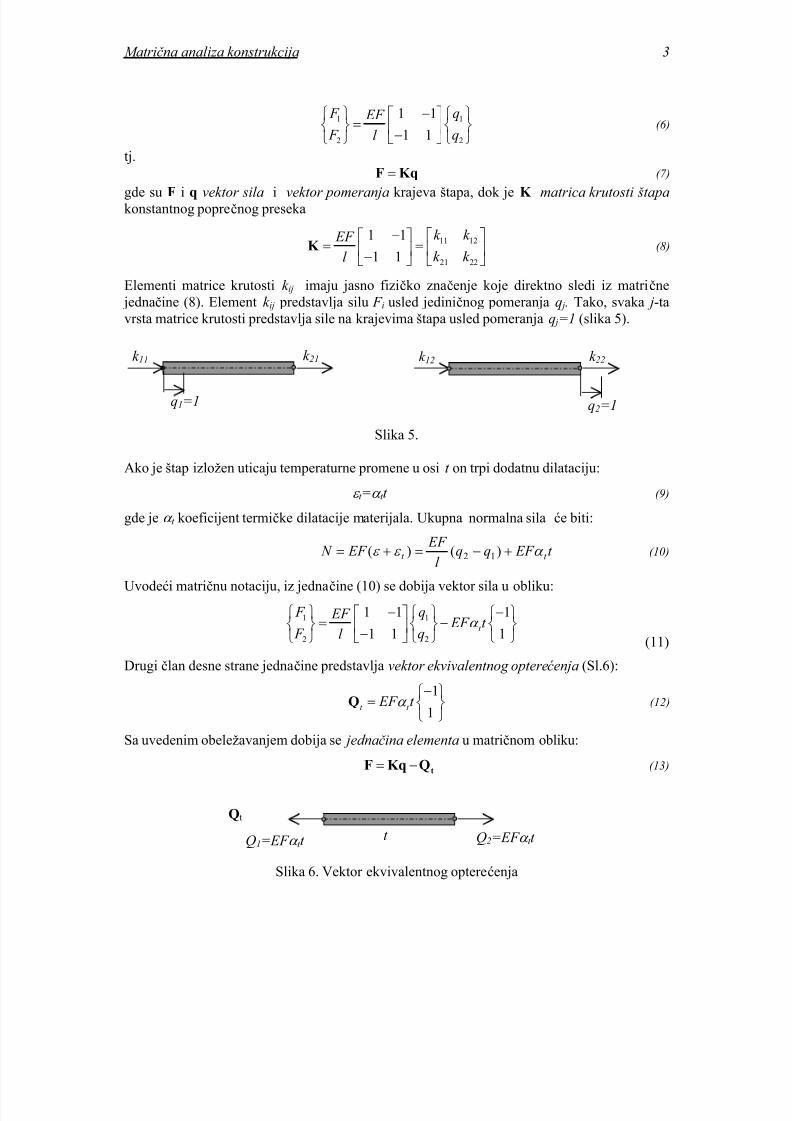
Elementi matrice krutosti k ij imaju jasno fizičko značenje koje direktno sledi iz matrične jednačine (8). Element k ij predstavlja silu F i usled jediničnog pomeranja q j. Tako, svaka j-tavrsta matrice krutosti predstavlja sile na krajevima štapa usled pomeranja q j=1 (slika 5).
Slika 5.
Ako je štap izložen uticaju temperaturne promene u osi t on trpi dodatnu dilataciju:
ε t =α t t (9)
gde je α t koeficijent termičke dilatacije materijala. Ukupna normalna sila će biti:
t EF qql
EF EF N t t α ε ε +−=+= )()( 12 (10)
Uvodeći matričnu notaciju, iz jednačine (10) se dobija vektor sila u obliku:
1 1
2 2
1 1 1
1 1 1t
F q EF EF t
F ql α
− − = − − (11)
Drugi član desne strane jednačine predstavlja vektor ekvivalentnog opterećenja (Sl.6):
1
1t t EF t α −
=
Q (12)
Sa uvedenim obeležavanjem dobija se jednač ina elementa u matričnom obliku:
= − tF Kq Q (13)
Slika 6. Vektor ekvivalentnog opterećenja
q1=1
k 11 k 21
q2=1
k 12 k 22
t Q1=EF α t t Q2=EF α t t
Qt

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 5/14
Matrič na analiza konstrukcija 4
2.2 Lokalni i globalni koordinatni sistem. Transformacija koordinata
Jednačina elementa (13) je formulisana u lokalnom koordinatnom sistemu xOy, gde se x-osa podudara sa osom štapa, dok je y-osa normalna na x i orjentisana tako da zajedno sa z -osomčini Dekartov koordinatni sistem desne orjentacije (slika 7).
Slika 7.Da bi mogli da formulišemo jednačine sistema potrebno da sva pomeranja i sile na krajevimaštapova budu izraženi u istom koordinatnom sistemu. To znači da se mora definisati
jedinstven globalni koordinatni sistem XOY, za sve štapove, koji će takođe biti desneorjentacije (slika 7). Njegov položaj u ravni može biti proizvoljan. Najbolje je, globalni sistem
postaviti tako, da je lako odrediti kooordinate svih tačaka sistema.
Vektor sila F tj. vektor pomeranja q krajeva štapa u lokalnom sistemu ima 2 komponente (po jednu na svakom kraju u pravcu ose štapa), dok u globalnom koordinatnom sistemu vektor sila F* tj. vektor pomeranja q* ima četiri komponente (po 2 na svakom kraju, u pravcu osa Xi Y globalnog koordinatnog sistema), slika 7..
1
2
q
q
=
q 1
2
F
F
=
F
*1
** 2
*3*4
q
q
q
q
=
q
*1
** 2
*3*
4
F
F
F
F
=
F (14)
Pošto su vektor sila, vektor pomeranja krajeva štapa i matrica krutosti štapa dati u lokalnomkoordinatnom sistemu neophodno je izvršiti transformaciju koordinata i prevesti ih u globalnikoordinatni sistem. Kako su lokalni i globalni sistem ortogonalni, transformacija koordinata jerelativno jednostavna. Transformacija pomeranja tj. sile iz jenog sistema u drugi, se dobijadirektno projektovanjem komponenata pomeranja/sile u globalnom sistemu na pravac
pomeranja/sile u lokalnom sistemu (sl.8).
* *1 1 2cos sinq q qα α = + (15)
α je ugao koji osa štapa zaklapa sa X-osom.
Y
X F*1, q*1
F*2, q*2 F*3, q*3
F*4, q*4
x y
F 1, q1
F 2, q2
α
O
Slika 8. Transformacija vektora izglobalnog u lokalni koordinatnisistem
q1
q1*
q2
*
α
lokalni
koordinatni sistem globalnikoordinatni sistem

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 6/14
Matrič na analiza konstrukcija 5
Ako jednačinu transformacije napišemu u matričnom obliku, za oba kraja štapa, dobija seveza između vektora pomeranja u lokalnom i globalnom koordinatnom sistemu:
*1*
1 2
*2 3*4
cos sin 0 0
0 0 cos sin
q
q q
q q
q
α α
α α
=
⇒ q = T q* (16)
gde je T matrica transformacije
cos sin 0 0
0 0 cos sin
α α
α α
=
T (17)
Matrica transformacije je ortogonalna:
Tt = T-1 (18)
Pa se iz jednačine (16) dobija da je:
q* = Tt q (19)
Iz jednačina (13) i (16) se dobija da je:
* *ˆ== =F K q K T q K q (20)
gde matrca K̂ daje vezu između sila u lokalnom sistemu i pomeranja u globalnom sistemu:
cos sin cos sinˆcos sin cos sin
EF
l
α α α α
α α α α
− − = − −
K (21)
Na osnovu činjenice da je F*=TtF iz jednačine (20) dobija se veza između vektora sila i pomeranja u globalnom koordinatnom sistemu u obliku:
* t * * *ˆ = =F T K q K q (22)
gde je K * matrica krutosti u globalnom koordinatnom sistemu
* t tˆ = =K T K T K T (23)
Množenjem matrica
*
cos 0
sin 0 cos sin cos sin
0 cos cos sin cos sin
0 sin
EF
l
α
α α α α α
α α α α α
α
− − = − −
K
dobija se da je:
* K -K
-K K e e
e e
EF
l
=
K (24)
gde je K e submatrica oblika:

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 7/14
Matrič na analiza konstrukcija 6
2
e 2
cos cos sinK
cos sin sin
α α α
α α α
=
(25)
Vektor ekvivalentnog čvornog opterećenja Qt takođe treba transformisati iz lokalnog uglobalni koordinatni sistem. Primenom gore objašnjene transformacije, dobija se da je vektor
ekvivalentnog čvornog opterećenja u globalnom sistemu Qt* jednak:Q*
t = Tt Qt
Nakon matričnog množenja, dobija se:
*
cos 0 cos
sin 0 1 sin
0 cos 1 cos
0 sin sin
t t t EF t EF t
α α
α α α α
α α
α α
− − − = =
Q (26)
3. Puni nosači
Osnovni element punih nosača u ravni je greda, kruto vezana na oba kraja sa ostalimdelovima nosača. U metodi deformacije taj element nazivamo štap tipa k . On je izloženaksijalnom naprezanju i savijanju.
3.1 Gredni element. Matrica krutosti štapa tipa k
Štap tipa k ima 6 stepeni slobode pomeranja, po tri u svakom čvoru: dva pomeranja u pravcu x i y ose i rotaciju oko z ose.
ϕ i , M i vi , T i ϕ k , M k vk , T k
Slika 9. Gredni element
ui , N i uk , N k
l
Vektor sila F i vektor pomeranja q krajeva štapa u lokalnom koordinatnom sistemu su:
=
=
k
k
k
i
i
i
v
u
v
u
q
q
q
q
ϕ
ϕ
6
5
4
3
2
1
q
=
=
k
k
k
i
i
i
M
T
N M
T
N
F
F
F F
F
F
6
5
4
3
2
1
F (27)
Da bi izveli matricu krutosti grednog elementa razmatraćemo aksijalno naprezanje i savijanjenezavisno jedno od drugog (slika 10).
i k

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 8/14
Matrič na analiza konstrukcija 7
Q3 , F 3 q2 , F 2 q6 , F 64 q5 , F 5
savijanje
+ q1 ,F 1 q2 , F 2 aksialno naprezanje
i k Slika 10.
Matrica krutosti za aksijalno napregnut element je predhodno izvedena (8).
Matrica krutosti štapa izloženog savijanju
Matrica krutosti za sluč aj savijanja K s se može izvesti polazeći od značenja koeficijenatamatrice: K ij predstavlja silu na mestu i usled jediničnog pomeranja na mestu j.
q1=1
Slika 11.
Na slici 11 su prikazani elementi matrice krutosti K ij, i=1,4, prizmatičnog štapa dobijeni usled pomeranja q j=1 , j=1,4. Vrednosti elemenata matrice krutosti K ij su određene primenommetode sila. Oni predstavljaju reakcije dva puta statički neodređenog nosača (sl.11) usledzadatog pomeranja oslonca. Matrica krutosti štapa se može napisati u obliku:
−
−−−−
−
=
22
22
4626
6126122646
612612
l l l l
l l l l l l
l l
l EI
3
sK (28)
Vektor ekvivalentnog čvornog opterećenja Qs u lokalnom koordinatnom sistemu ima 4
komponente:
i k
K 11=12EI/l 3
K 31=-12EI/l 3
K 21=6EI/l 2 K 41=6EI/l 2
K 12=6EI/l 2
q2=1
K 22=4EI/l
K 42=2EI/l
K 32=6EI/l 2
K 33=12EI/l 3
K 23=-6EI/l 2 K 43=-6EI/l 2
K 13=-12EI/l 3
q3=1
q4=1
K 14=6EI/l 2
K 34=6EI/l 2
K 24=2EI/l
K 24=4EI/l
8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 9/14
Matrič na analiza konstrukcija 8
=
4
3
2
1
Q
Q
Q
Q
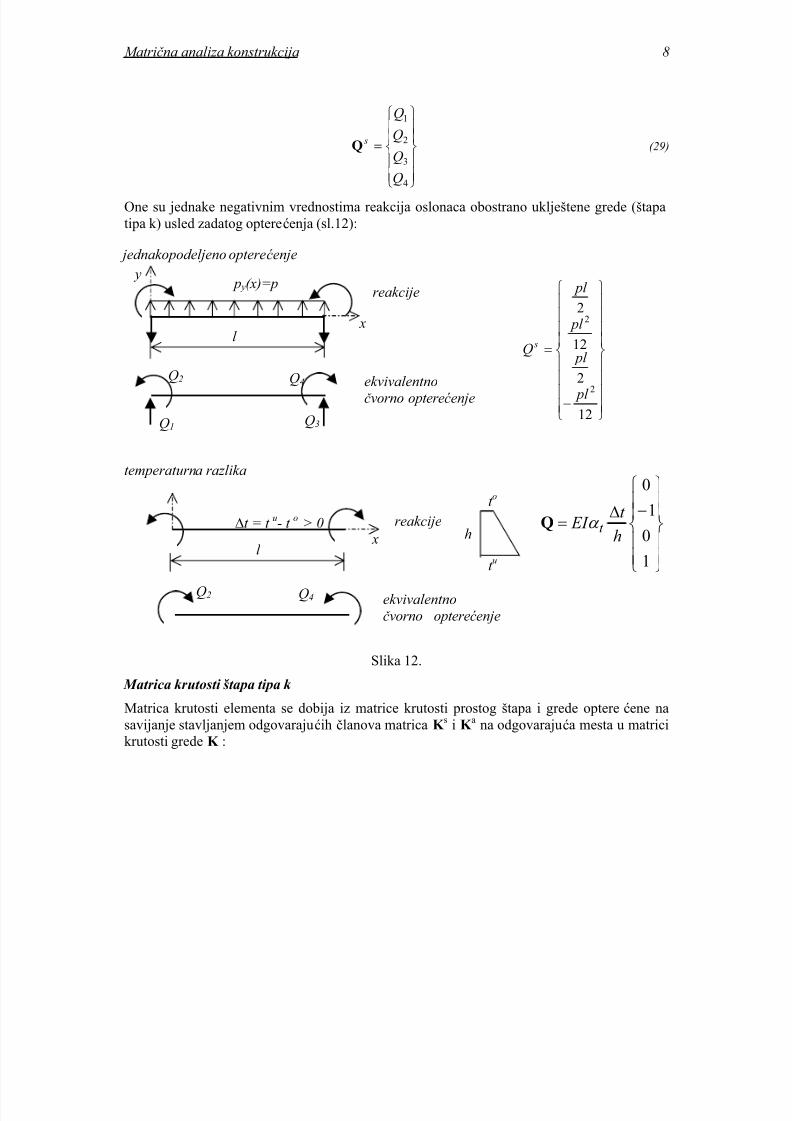
sQ (29)
One su jednake negativnim vrednostima reakcija oslonaca obostrano uklještene grede (štapatipa k) usled zadatog opterećenja (sl.12):
jednakopodeljeno opterećenje
−
=
12
2
12
2
2
2
pl
pl
pl
pl
Q s
temperaturna razlika
t o
t u
Slika 12.
Matrica krutosti štapa tipa k
Matrica krutosti elementa se dobija iz matrice krutosti prostog štapa i grede opterećene nasavijanje stavljanjem odgovarajućih članova matrica K s i K a na odgovarajuća mesta u matricikrutosti grede K :
x
ekvivalentnoč vorno opterećenje
Q2
Q1
Q4
Q3
reakcije
l
p y(x)=p y
∆t = t u- t
o> 0
ekvivalentnoč vorno opterećenje
Q2 Q4
reakcije
xl
h
−∆=
1
0
1
0
h
t EI t α Q

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 10/14
Matrič na analiza konstrukcija 9
−
−−−
−
−
−
−
=
l
EI
l
EI
l
EI
l
EI l
EI
l
EI
l
EI
l
EI l
EF
l
EF l
EI
l
EI
l
EI
l
EI l
EI
l
EI
l
EI
l
EI l
EF
l
EF
460
260
6120
6120
0000
26
0
46
0
6120
6120
0000
22
2323
22
2323
K (30)
Uslov ravnoteže grednog elementa opterećenog proizvoljnim opterećenjem se može napisati umatričnom obliku:
F = K q – Q (31)
Vektor ekvivalentnog opterećenja se takođe dobija postavljanjem na odgovarajuća mesta predhodna 2 vektora:
=
6
5
4
3
2
1
Q
Q
Q
Q
Q
Q
Q (32)
3.2 Matrica transformacije
Y
Slika 13.
X F*1, q*1
F*3, q*3 F*4, q*4
F*5, q*5
x y
α
O
F 1, q1
F 5, q5
F 2, q2
F 4, q4
F 3, q3
F 6, q6 F*6, q*6
F*2,
q*2
aksijalno n.
savijanje
aksijalno n.
savijanje

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 11/14
Matrič na analiza konstrukcija 10
Matrica transformacije se dobija projektovanjem komponenata vektora pomeranja/sila uglobalnom koordinatnom sistemu na pravac komponenata lokanog koordinatnog sistema:
α α sinqcosqq *2*11 += α α cos*
2*12 q sinqq +−= (33)
M*, ϕ * ϕ = ϕ*
M, ϕ
Slika 14. Vektorska transformacija
Kada se napiše u matričnom obliku, za oba kraja štapa, veza između pomeranja u lokalnom iglobalnom koordinatnom sistemu glasi:
q = T q* (33)
gde je T matrica transformacije:
−
−
=
1
cossin
sincos
1
cossin
sincos
α α
α α
α α
α α
T (34)
Matrica transformacije je ortogonalna:
Tt = T-1
pa je:
q*
= Tt q F
*= T
t F Q*
= Tt Q
Odakle sledi da je:* *ˆ== =F K q K T q K q
Matrica K̂ =KT daje vezu uzmeđu sila u lokalnom koordinatnom sistemu i pomeranja uglobalnom koordinatnomsistemu. Na osnovu toga da je F*=T
tF dobija se veza između sila i
pomeranja u globalnom koordinatnom sistemu:* t * * *ˆ = =F T K q K q (35)
gde je K * matrica krutosti elementa u globalnom koordinatnom sistemu:
K* = TtK T (36)
X
x
Y
F , q
q1 , F 1
q2 , F 2
q*1 , F*1
q*2 ,F*2
α

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 12/14
Matrič na analiza konstrukcija 11
4. Globalna analiza sistema
Slika 15. Vektor pomeranja nepovezanog i povezanog sistema štapova
Matrice krutosti *eK nepovezanih elemenata 1 i 2 su:
*1 *1 *1 *111 12 13 14*1 *1 *1 *1
1 21 22 23 24*1 *1 *1 *131 32 33 34*1 *1 *1 *141 42 43 44
*
k k k k
k k k k
k k k k
k k k k
=
K
*2 *2 *2 *211 12 13 14*2 *2 *2 *2
2 21 22 23 24*2 *2 *2 *231 32 33 34*2 *2 *2 *241 42 43 44
*
k k k k
k k k k
k k k k
k k k k
=
K (37)
Sve vrste i kolone se numerišu (kodraju) odgovarajućim kodnim brojevima, prema tome kakosu predhodno označene komponente sila, tj. pomeranja čvorova u globalnom koordinatnomsistemu, polazeći od čvora koji je definisan kao "prvi čvor elementa".
Matrica sistema povezanih štapova na slici 15. ima 6 elemenata (= 3čvora x 2pomeranja). Onadaje vezu između 6 komponenata pomeranja q1
*, q2*,…., q6* i 6 komponenata sila učvorovima F 1
*, F 2*,…., F 6
* u globalnim koordinatama.
1 1 1 111 12 13 141 1 1 112 22 23 241 1 1 2 1 2 2 2
* 31 32 33 33 34 34 31 321 1 1 2 1 2 2 241 42 43 43 44 44 41 42
2 2 2 211 12 13 142 2 2 221 22 23 24
k k k k
k k k k
k k k k k k k k
k k k k k k k k
k k k k
k k k k
+ +
= + +
K
*1*
2*
3*
4*
5*
6
F
F
F
F
F
F
(38)
Dobija se formiranjem nulte matrice reda 6. Prvo se kodiraju sve vrste i kolone te matrice.Zatim se članovi matrica krutosti pojedinih elemenata *eK stavljaju na odgovarajuće mesto umatrici krutosti K *, prema kodnom broju. Članovi koji imaju isti kodni broj se sabiraju.
Vektor ekvivalentnog čvornog opterećenja Qt * se takođe dobija jednostavnim sumiranjem
komponenata vektora opterećenja svakog elementa sa istim kodnim brojem:
1
*1
1q
*21q
*1
3q
*41q
1
2
2
*21q
*22q
*23q
*24q
3
2
*1q
*2q
*3q
*4q
*5q
*6q
1
2
3
1
3
2
2
1
Sistem štapova
nepovezan
sistem štapova
Povezan
sistem
štapova
q1* q2
* q3* q4
* q5* q6
*
1 2 3 4
1
2
3
4
5 6 3 4
5
6
3
4
kodni brojevi

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 13/14
Matrič na analiza konstrukcija 12
* *11, 1,* *12, 2,* *1 *23, 3, 3,* *1 *24, 4, 4,* *25, 1,* *26, 2,
t t
t t
t t t
t t t
t t
t t
Q Q
Q Q
Q Q Q
Q Q Q
Q Q
Q Q
+
= +
(39)
Slika 16. Vektor ekvivalentnih sila nepovezanog i povezanog sistema štapova
Lako se može pokazati da matrična jednačina (40) predstavlja uslove ravnoteže sila u svimčvorovima:
* * * * t = +K q P Q (40)
gde je P* vektor spoljašnjeg opterećenja u čvorovima. Ako uvedemo obeležavanje:* * *
t = +S P Q (41)
dobija se da je:* * *=K q S (42)
Jednačina (42) predstavlja sistem od N linearnih algebarskih jednačina, gde je N broj stepenislobode sistema. Matrica K * je matrica krutosti sistema. Ona je singlarna matrica, postosistem jednačina (42) sadrži u sebi i veze sila i pomeranja sistema kao krutog tela (linearnozavisne jednačine).
Jednačina (42) se može rešiti tek pošto se sistemu zadaju granični uslovi (uslovi oslanjanja).Ako sa *
nq obeležimo vektor pomeranja slobodnih čvorova (nepoznata pomeranja), a sa * sq
vektor poznatih pomeranja (pomeranja oslonaca), tada jednačinu (42) možemo napisati uobliku:
* * *
* * *
*nn ns n n
*
sn ss s s
=
K K q S
K K q S(43)
gde su *ijK , i *
iS , submatrice i subvektori, koje odgovaraju pomeranjima *iq , i,j=n,s.
U praksi mogu nastupiti 2 slučaja:
2
2
*21,t Q
*22,t Q
*23,t Q
*24,t Q
3
1
2
*11,t Q
*12,t Q
*13,t Q
*14,t Q
1
*1,t Q
*2,t Q
*3,t Q
*4,t Q
*5,t Q
*6,t Q
1
2
3
t
t
1
3
2

8/6/2019 29matricna analiza
http://slidepdf.com/reader/full/29matricna-analiza 14/14