







Idiomas
Páginas
Jurídico


Análisis numérico de la adhesión fibra matriz con
un modelo de interfaces cohesivas acoplado.
por
Claudia Alejandra Morel
U
Tesis propuesta de acuerdo a los requerimientos de la Universidad Nacional del Nordeste para la obtención del título de Magister en Ciencias de la Ingeniería. Carrera
aprobada por CONEAU mediante Resolución Nº 945/99
Director: Mag. Ing. Ricardo José Barrios D’Ambra Co-Director: Mag. Ing. Héctor Darío Cóceres
Resistencia, Octubre de 2010
Aprobada por
____________________________________________________________________________________
____________________________________________________________________________________
____________________________________________________________________________________
Fecha ____________________________________________________________________________________

Facultad de Ingeniería
Universidad Nacional del Nordeste
Resumen
Análisis numérico de la adhesión fibra matriz con un modelo de interfaces cohesivas acoplado.
Por Claudia Alejandra Morel
Director: Mag. Ing. Ricardo José Barrios D’Ambra Co-Director: Mag. Ing. Héctor Darío Cóceres
El proceso de propagación de fisuras puede ser descripto por medio de modelos cohesivos. Entre sus aplicaciones más importantes, se encuentra el modelado del despegado de la interface fibra/matriz en un material compuesto (como por ejemplo hormigones reforzados con fibras). La resistencia al despegado puede medirse, utilizando un ensayo de extracción de fibra (en inglés pushout o pullout): consiste básicamente en extraer por compresión o por tracción una fibra de la matriz. Se pueden usar dispositivos de cualquier geometría, pero se ha observado experimentalmente que en el ensayo de pullout es preponderante el corte, dando una alta resistencia al despegado. En este trabajo se realiza la simulación numérica de un ensayo de extracción de fibra, mediante el método de los elementos discretos (MED), utilizando un modelo de interfaz cohesiva para la zona de contacto fibra/matriz. Se aplica el modelo numérico a un sistema en 3D de poliéster/epoxi, y el proceso de despegado fibra/matriz es capturado con la ayuda de elementos cohesivos agregados al MED. Posteriormente se aplica el modelo numérico para realizar un estudio de la influencia de la variación de diversos parámetros no geométricos, en el proceso de falla de la interfaz fibra/matriz.

Abstract
The crack propagation process can be described by means of cohesive models. One of the most important applications of the cohesive law, is the modeling of the interface fiber / matrix debonding in a composite material (for example, fiber reinforced concrete). The debond resistance can be measured using a fiber pushout or pullout test. This test consists basically in extracting a fiber from the matrix either by compression or traction. Any geometry can be used to measure debond resistance, but it has been observed experimentally that the fiber pullout is shear dominant, giving a high debond resistance. In this work a numerical simulation of a 3D fiber pullout test is presented, using the discrete element method (DEM) and a cohesive interface model for the fiber / matrix contact area. The numerical model is applied to a polyester / epoxy composite, and the fiber / matrix debonding is simulated with the addition of cohesive elements. This model is used to perform a study of the effect of different nongeometric parameters on the failure mechanism of the composite model.

Declaración: El presente trabajo no ha sido previamente aceptado en esencia para ninguna titulación y tampoco se ha propuesto en la candidatura de ninguna graduación. Manifiesto 1: Esta tesis es el resultado de mis propias investigaciones, excepto donde se declare explícitamente lo contrario. Otras fuentes son reconocidas en las referencias dadas. Manifiesto 2: Por este medio doy a la Editorial de la UNNE los derechos de reproducir y distribuir mi tesis, si es aceptada, a través del mundo.

En memoria de Ismael y Josefa.

Agradecimientos
Mi agradecimiento a mi orientadores, Mag. Ing. Ricardo Barrios D’Ambra y Mag.
Ing. Héctor Cóceres por su disposición y por la guía que me han dado en el transcurso
de la producción de esta Tesis.
Al Departamento de Mecánica Aplicada por la ayuda y el apoyo brindado.
A los profesores y autoridades de la Facultad de Ingeniería de la UNNE, por su
cooperación y por haber facilitado los medios para concretar el trabajo.
A la Secretaría General de Ciencia y Técnica de la UNNE, por su apoyo financiero.
Al Dr. Prof. Ing. Mario Natalini y al Instituto de Estabilidad, por su colaboración.
Al Dr. Prof. Ing. Ignacio Iturrioz, por las sugerencias brindadas para mejorar este
trabajo.
Al Mag. Ing. Gustavo Di Rado, por la ayuda en la confección de gráficos para esta
Tesis.
A mis amigos y colegas de la Facultad de Ingeniería de la UNNE, por su aliento y su
afecto.
A mi familia, por la fuerza que siempre me brindan con su cariño y paciencia.

Parte de esta Tesis fue publicada en los siguientes congresos: Morel Claudia A., Cóceres, Héctor D., Barrios D’ Ambra, Ricardo J. L. Ley cohesiva con esfuerzo normal y corte acoplados para un ensayo de extracción de fibra por compresión (test de Pushout). Reunión de Comunicaciones Científicas y Tecnológicas 2010, Cs. Exactas y Tecnológicas, UNNE, Corrientes, Argentina, http://www.unne.edu.ar/investigacion/com2010/exactas.php Morel Claudia A., Cóceres, Héctor D., Barrios D’ Ambra, Ricardo J. L. Ley cohesiva para modelar el proceso de fractura aplicando el método de los elementos discretos. XXXIV Jornadas Sudamericanas de Ingeniería Estructural, 2010, San Juan, Argentina. http://www.jornadas2010.unsj.edu.ar Morel Claudia A., Cóceres, Héctor D., Barrios D’ Ambra, Ricardo J. L. Aplicación del método de los elementos discretos al proceso de separación fibra-matriz con un modelo de interfaces cohesivas. Congreso MECOM-CILAMCE del Bicentenario, 2010, Buenos Aires, Argentina (en prensa). http://www.mecom2010.net/

Índice General
Capítulo 1 .............................................................................................................................................. 18
Introducción y Antecedentes ............................................................................................................. 18
1.1 Introducción ............................................................................................................................... 18
Objetivo General ....................................................................................................................... 19
Objetivos particulares ............................................................................................................... 19
Organización del Trabajo ........................................................................................................... 20
1.2 Mecánica de Fractura ................................................................................................................. 21
1.3 De la fabricación y procedencia de los materiales compuestos ................................................ 25
1.4 Resistencia al Despegado (Debond Resistance) ......................................................................... 26
1.5 De los ensayos de Pullout y Pushout .......................................................................................... 30
Capítulo 2 .............................................................................................................................................. 36
Teoría .................................................................................................................................................... 36
2 .1 Leyes cohesivas .......................................................................................................................... 36
2.2 Clasificación de las leyes cohesivas. ........................................................................................... 39
2.3 Modelo Cohesivo para carga combinada. .................................................................................. 46
Capítulo 3 .............................................................................................................................................. 51
Implementación .................................................................................................................................... 51
3.1 Introducción ............................................................................................................................... 51
3.2 Método de los Elementos Discretos DEM ................................................................................... 51
3.2.1 Antecedentes...................................................................................................................... 51
3.2.2 Formulación del método ..................................................................................................... 52
3.2.3 Rigidez de las Barras ............................................................................................................. 53
3.2.4 Solución de la ecuación de equilibrio ................................................................................ 56
3.2.5 Relación constitutiva del elemento .................................................................................... 57
3.2.6 Integración por diferencias finitas ..................................................................................... 60
3.3 Modelado de la Ley Cohesiva .................................................................................................... 61
3.3.1 Ley Cohesiva Desacoplada ............................................................................................... 61

3.3.2 Ley Cohesiva Acoplada .................................................................................................... 62
Capítulo 4 .............................................................................................................................................. 66
Análisis y Verificación ............................................................................................................................ 66
4.1 Simulación numérica del ensayo Pullout .................................................................................... 66
4.1.1 Modelo de Ley Cohesiva con Carga Combinada Desacoplada ............................................. 68
4.1.2. Modelo de Ley Cohesiva con Carga Mixta Acoplada.......................................................... 71
4.1.3 Estudio paramétrico de los ensayos de Pullout. .................................................................. 73
4.1.3.1 Coeficiente de Fricción μ ............................................................................................. 73
4. 1.3.2 Resistencia interfacial ............................................................................................... 75
4.1.3.3 Relación de módulos de elasticidad ........................................................................... 76
4.2 Simulación numérica del ensayo Pushout .................................................................................. 78
4.2.1 Modelo de Ley Cohesiva con Carga Combinada Desacoplada ............................................. 78
4.2.2 Modelo de Ley Cohesiva con Carga Combinada Acoplada .................................................. 79
4.2.3 Estudio paramétrico de los ensayos de Pushout. ................................................................ 81
4.2.3.1 Coeficiente de Fricción μ ............................................................................................... 81
4.2.3.2 Resistencia interfacial ................................................................................................... 83
4.2.3.3 Relación de módulos de elasticidad .............................................................................. 85
Capítulo 5 .............................................................................................................................................. 90
Conclusiones ......................................................................................................................................... 90
Conclusiones y Trabajos Futuros ....................................................................................................... 90
Bibliografía ........................................................................................................................................ 94

Índice de Tablas y Figuras
Figura 1.1: El amplio campo de la Mecánica de Fractura (Broek, 1984). .............................................. 22
Figura 1.2: Los tres modos de fisuración (Broek, 1984). ........................................................................ 23
Figura 1.3: Ley cohesiva y tensión deformación, elementos clave en el análisis de
estructuras (Sørensen & Jacobsen, 2003). ........................................................................................ 24
Figura 1.4: Procesos inelásticos que acompañan el despegado (Zhigang Suo, 1993). ......................... 28
Figura 1.5: Esquema de ensayo de pushout en un material compuesto (Lin, Geubelle, &
Sottos, 2001). .................................................................................................................................... 28
Figura 1.6: Geometrías convenientes para medir la resistencia al despegado (Zhigang Suo,
1993) . ............................................................................................................................................... 29
Figura 1.7: Curva carga‐desplazamiento típica obtenida en ensayos de pushout (Lin,
Geubelle, & Sottos, 2001) ................................................................................................................. 31
Figura 2.1: Ley cohesiva a distintas escalas ( Risø National Laboratory, 2009) ..................................... 38
Figura 2.2: Ley cohesiva desacoplada utilizada por Thouless et al (2006) ............................................. 42
Figura 2.3: Ley cohesiva acoplada de Tvergaard y Hutchinson (1992) .................................................. 42
Figura 2.4: Cuatro grandes grupos de leyes cohesivas .......................................................................... 44
Figura 3.1 : a) Detalle del módulo cúbico básico. b) Prisma compuesto por varios módulos
cúbicos. ............................................................................................................................................. 53
Figura 3.2: Relación Constitutiva Elemental de las barras del reticulado ‐ a) Diagrama
constitutivo adoptado con sus parámetros de control; b) Esquema para la carga y
descarga. (Rocha, 1989). ................................................................................................................... 58
Figura 3.3: Ley cohesiva desacoplada. Fuerza de corte T versus separación por corte ΔT
para ΔN= 0. ........................................................................................................................................ 61
T
Figura 3.4: Fuerza Normal TN versus separación por apertura ΔN para ΔT= 0. ...................................... 61
Figura 3.5: Ley cohesiva. (a) Tracción Normal TN como función de la separación normal δN
para δT= 0; (b) Tracción de corte TT versus separación por corte δT para δN= 0. Las curvas
continuas y de puntos corresponden a falla por corte cohesivo para contacto friccional y
no friccional respectivamente. ......................................................................................................... 64
Figura 4.1: Esquema del modelo para ensayo pullout y pushout .......................................................... 67
Figura 4.2: Malla deformada .................................................................................................................. 68
Figura 4.3: Comparación de resultados para ley cohesiva desacoplada para ensayo de
pullout, carga vs. Desplazamiento con los ensayos obtenidos por Lin et al mediante MEF ............ 70

Figura 4.4: Comparación de resultados para ley cohesiva desacoplada para ensayo de
pullout, longitud despegada vs. Desplazamiento de la fibra, con los ensayos obtenidos
por Lin et al mediante MEF ............................................................................................................... 70
Figura 4.5: Diagrama carga‐desplazamiento para los modelos de ley Cohesiva 1 y 2
comparados con los resultados obtenidos por Lin et al para un ensayo de pullout. ....................... 72
Figura 4.6: Diagrama longitud despegada‐desplazamiento para los modelos de ley Cohesiva
1 y 2 comparados con los resultados obtenidos por Lin et al para un ensayo de pullout. ............... 72
Figura 4.7: Influencia de la variación del coeficiente de fricción μ sobre la curva carga
aplicada‐desplazamiento en un ensayo de pullout. ......................................................................... 74
Figura 4.8: Influencia de la variación del coeficiente de fricción μ sobre la evolución de la
longitud despegada en un ensayo de pullout. .................................................................................. 74
Figura 4.9: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la curva
carga‐desplazamiento para el ensayo de pullout. ............................................................................ 75
Figura 4.10: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la evolución
de la longitud despegada para el ensayo de pullout ........................................................................ 76
Figura 4.11: Efecto de la razón de módulos Ef/Em sobre la curva carga‐desplazamiento para
el ensayo de pullout .......................................................................................................................... 77
Figura 4.12: Efecto de la razón de módulos Ef/Em sobre la evolución de la longitud
despegada para el ensayo de pullout ............................................................................................... 77
Figura 4.13: Carga vs. desplazamiento para Modelo 3 comparado con datos experimentales
y ensayos obtenidos por Lin et al (pushout) ..................................................................................... 78
Figura 4.14: Comparación de la curva longitud despegada vs. desplazamiento entre Modelo
3, datos experimentales y resultados de Lin et al, para el ensayo de pushout ................................ 79
Figura 4.15: Diagrama carga‐desplazamiento para Modelos 1 y 2, resultados experimentales
y resultados obtenidos por Lin et al, para un ensayo de pushout. ................................................... 80
Figura 4.16: Diagrama longitud despegada‐desplazamiento de la fibra para Modelos 1 y 2,
resultados experimentales y resultados obtenidos por Lin et al para un ensayo de
pushout. ............................................................................................................................................ 81
Figura 4.17: Influencia de la variación del coeficiente de fricción μ sobre la curva carga
aplicada‐desplazamiento en un ensayo de pushout. ........................................................................ 82
Figura 4.18: Influencia de la variación del coeficiente de fricción μ sobre la evolución de la
longitud despegada en un ensayo de pushout. ................................................................................ 83
Figura 4.19: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la curva
carga‐desplazamiento para el ensayo de pushout ........................................................................... 84
Figura 4.20: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la evolución
de la longitud despegada para el ensayo de pushout ...................................................................... 84
Figura 4.21: Efecto de la razón de módulos Ef/Em sobre la curva carga‐desplazamiento para
el ensayo de pushout ........................................................................................................................ 85
Figura 4.22: Efecto de la razón de módulos Ef/Em sobre la evolución de la longitud
despegada para el ensayo de pushout ............................................................................................. 86
Figura 4.23. Secuencia de imágenes: Vista en perspectiva y en corte transversal de las
tensiones principales ........................................................................................................................ 87
Fig. 4.24. Vista en perspectiva y en corte transversal de las isosuperficies de tensiones
principales ......................................................................................................................................... 88
Fig. 4.25 Corte transversal de tensiones de corte en el plano XY .......................................................... 88
Figura. 5.1: Comparación de los ensayos de pushout y pullout: Carga versus desplazamiento
de la fibra .......................................................................................................................................... 92
Figura. 5.2: Comparación entre ensayo de pushout y pullout: Longitud despegada versus
desplazamiento de la fibra ................................................................................................................ 92

Lista de símbolos y abreviaturas
A tamaño de la fisura
Af área de la superficie fracturada
C matriz de amortiguamiento (diagonal)
CVFE elementos finitos cohesivo/volumétrico (cohesive/volumetric finite element)
CMOD abertura de la “boca” de la fisura (crack mouth opening displacement)
CTOD abertura de la punta de la fisura (crack tip opening displacement)
Cij constantes elásticas
D desplazamiento
Da Variable de daño
Df constante vinculada al coeficiente de amortiguamiento crítico ξn
E módulo de elasticidad o de Young
EA rigidez de las barras del modelo reticulado
E Ad rigidez de las barras diagonales
E An rigidez de las barras normales
EF elementos finitos
Ef módulo de elasticidad de la Fibra
Em módulo de elasticidad de la Matriz
F fue
vector de fuerzas internas
rza aplicada
G tasa de energía liberada de Griffith
Gf tasa de energía superficial G utilizada en el MED
GI tasa de energía liberada en modo I
GII tasa de energía liberada en modo II
H Altura de la Matriz
K factor de intensidad de tensiones
KI, KII, KIII factor de intensidad de tensiones para modos I, I y III
Lc longitud despegada
Le longitud del modulo elemental
LSB large scale bridging
M matriz de masa nodal (diagonal)
MED método de los elementos discretos (en inglés DEM)
MEF método de los elementos finitos (en inglés FEM)
MFLE mecánica de fractura lineal elástica (en inglés LEFM)
P carga aplicada sobre la fibra en el ensayo de pullout y pushout
Pcr fuerza máxima de tracción transmitida por la barra
vector de fuerzas externas
Qij constantes elásticas del sólido equivalente representado por la estructura reticulada
Qd11 propiedad unidireccional efectiva correspondiente a las barras diagonales
Qn11 propiedad unidireccional efectiva normal a las caras de un cubo
R radio de la fibra
Rfc factor de falla
T vector tracción tri-dimensional
T tracción
T (δ) ley cohesiva
Tmax tracción máxima, resistencia cohesiva
TN , TT dirección normal y tangencial de la tracción, respectivamente
TN,max, TT,max valor máximo en dirección normal y tangencial de la tracción, respectivamente
Vp velocidad de las ondas de compresión P
a semilongitud de la fisura en el plano o radio de la fisura en el espacio
fn frecuencia natural de vibración de modo n (Hz)
ft tensión de control crítica
kr ductilidad, parámetro que permite calcular εr
q parámetro de interacción o acoplamiento para la separación normal y tangencial
rf radio de la Fibra
rm radio de la Matriz
rs radio del soporte
ui components del vector desplazamiento
[u] vector del “salto” de desplazamientos en el elemento cohesivo (equivalente al vector separación)
x,
vector de desplazamientos nodales
y, z Coordenadas cartesianas
Δ separación interfacial
ΔCN separación interfacial crítica en la dirección normal
ΔΝ separación interfacial en la dirección normal

ΔΝmax separación interfacial máxima en la dirección normal
ΔΝp separación interfacial plástica en la dirección normal
ΔCT separación interfacial crítica en la dirección tangencial
ΔT separación interfacial en la dirección tangencial
ΔTmax separación interfacial máxima en la dirección tangencial
ΔTp separación interfacial plástica en la dirección tangencial
ΔT1, ΔT2 componentes de la separación interfacial en las dos direcciones tangenciales
Δt intervalo de tiempo
Δtcrítico intervalo de tiempo crítico
ΔP Desplazamiento de la fibra provocado por la Fuerza P
Γ resistencia al despegado
Γmax energía cohesiva total, energía de separación en la falla
G Fuerza de despegado
α parámetro de acoplamiento
β segundo parámetro de Dunders
χ parámetro que depende de la geometría del problema y de la longitud de la fisura
δ parámetro adimensional de la separación. Separación, deformación.
δc, δmax separación en la falla (separación crítica)
δ1, δ2 parámetros de forma para diversas leyes cohesivas
δ5 abertura de la punta de la fisura definida a una distancia de 5 mm de un lado a otro de la misma, sobre la superficie del espécimen
δN, δT parámetro normalizado de la dirección normal y tangencial de la separación, respectivamente
δNmax, δTmax dirección normal y tangencial de la separación crítica, respectivamente
δNp, δTp parámetro normalizado de la dirección normal y tangencial de la separación en región plástica, respectivamente
δp parámetro normalizado de la separación en la zona plástica
δt ,δ5 abertura de la punta de la fisura (crack tip opening displacement CTOD)
εp deformación plástica
εr deformación para la cual la barra no transmite más esfuerzos de tracción
ϕ función que dependerá del tipo de material a modelar (relación constitutiva)
λ módulo de corte
μ coeficiente de fricción
ν coeficiente de Poisson
νf coeficiente de Poisson de la Fibra
νm coeficiente de Poisson de la Matriz
π constante matemática aproximadamente igual a 3,14159265358979
θ modo de combinación (mode mixity)
σ tensión, parámetro normalizado de la tensión T
σ(δ) tensión cohesiva local
σc, σmax tensión de tracción normal máxima o crítica, resistencia cohesiva o interfacial
σij componentes del tensor de tensiones de Cauchy o tensor de tensiones
τ parámetro normalizado de la tensión T
τmax tensión de tracción tangencial máxima o crítica, resistencia cohesiva o interfacial
ξn coeficiente de amortiguamiento crítico
ψ parámetro de modalidad mixta

Glosario
Coeficiente de Poisson: valor absoluto de la relación entre la deformación unitaria normal transversal y la deformación unitaria axial
Crazing (Microfisuracion): líneas diminutas que aparecen cerca de la superficie de los materiales tales como el plástico, generalmente como resultado de una respuesta al ambiente. Las microfisuras constituyen una región tensionada asociada a fisuras, grietas, partículas de impureza y heterogeneidades moleculares. Normalmente esta región se propaga perpendicularmente al eje del esfuerzo de tracción. El espesor de una microfisura suele ser inferior a 5 micrones.
Ductilidad – Material Dúctil: capacidad de deformación plástica de un material antes de su rotura. Un material se considera dúctil cuando puede soportar alargamientos mayores al 5%.
Elastómeros: polímeros con una cantidad intermedia de enlaces cruzados.
Extrínseco: (ley o modelo cohesivo) depende solamente de la porción de la ley cohesiva correspondiente al modelado de la falla (decreciente). En otras palabras, en este modelo, la tracción cohesiva se establece igual a la resistencia del material. Este modelo particular es llamado extrínseco porque a diferencia del método intrínseco para el cual el criterio de inicio de la falla está inherentemente contenida en el modelo, este segundo enfoque requiere la introducción de un criterio separado para el comienzo del proceso de falla, (i.e., para la introducción de los elementos cohesivos en el esquema de los elementos finitos volumétrico‐ cohesivo).
Fenomenológico: (Ciencia) Se utiliza para describir un campo de conocimientos que relacionan observaciones empíricas de un fenómeno entre sí, de tal manera que sea consistente con una teoría fundamental, pero no es derivada directamente de ella.
Teoría fenomenológica: teoría que expresa matemáticamente los resultados observados de un fenómeno sin prestar atención detallada a su significado fundamental.
Ejemplos: Segunda ley de la Termodinámica, Modelo planetario de Rutherford.
Fluencia: inicio de la deformación plástica.
Fragilidad – Material Frágil: Propiedad del material se rompe sin mayor deformación plástica. Un material se considera frágil cuando se fractura con alargamientos menores al 5%.
Gap: Espacio entre objetos o puntos, apertura. Interrupción en la continuidad. Disparidad.
Homogeneidad material: calidad de invariabilidad de las propiedades de un material en cada uno de los puntos constituyentes.
Interface: superficie entre dos cuerpos. Los dos cuerpos comparten este límite inicialmente.
Interfase: es una combinación de fases. Por ejemplo en ( (Salomonsson, 2002 ), hay dos adherentes y la capa adhesiva.
Intrínseco: (ley o modelo cohesivo) caracteriza la respuesta del elemento cohesivo mediante una curva tracción‐separación, que comenzando desde el origen, posee una porción de endurecimiento (creciente) que denota una resistencia creciente de la superficie cohesiva de separación. Cuando se logra una separación suficiente, la tracción cohesiva alcanza un valor máximo correspondiente a la resistencia de falla �c, del material. La curva tracción‐separación sigue luego con una porción de debilitamiento (decreciente) asociada con el proceso de falla. Cuando la separación δ alcanza un valor crítico δc la tracción cohesiva τ, se supone que se desvanece, llevando a la creación de una superficie libre de tracción (i.e.: fisura) en el dominio discretizado (Needleman A. , 1987), (Kubair & Geubelle, 2003).

Isotropía – Material Isótropo: característica de un material según la cual sus propiedades son iguales en distintas direcciones.
Material compuesto, composite o composito: Los materiales compuestos están formados por la combinación de dos o más materiales para obtener propiedades (físicas, químicas, etc.) tales que sean superiores a aquellas de sus constituyentes. Los principales componentes de los materiales compuestos, o composites, son las fibras y la matriz (binder). Las fibras son, en general, ortotrópicas y proveen la mayoría de la rigidez y resistencia; la matriz mantiene unidas a las fibras permitiendo de este modo una transferencia de cargas entre las fibras, el composite y las cargas exteriores.
Monótona: Matemáticas. (De una función o de un conjunto particular de valores de una función) creciente o decreciente.
Ondas de Schallamach: En dinámica de los sólidos elásticos sometidos a fricción seca, existen resultados experimentales sobre el frotamiento de materiales de diferente dureza. Durante el deslizamiento se observa la formación de pliegues de despegado en el material más blando, que se denominan "onda de Schallamach". En 1971, (Schallamach, 1971) descubrió que la fricción en interfaces de elastómeros blandos esta usualmente dominada por la aparición y propagación de inestabilidades elásticas en la forma de ondas superficiales.
Ondas P: (onda primaria) componente longitudinal a la dirección de propagación de una onda elástica.
Ortotropía – Material Ortótropo: característica de un cuerpo según la cual sus propiedades físicas son diferentes en direcciones perpendiculares entre sí.
Polímeros: Compuestos plásticos de carbono y otros elementos químicos que forman moléculas en largas cadenas.
Pullout: ensayo en el cual se extrae mediante una fuerza de tracción una fibra de la matriz que lo contiene.
Pushout: ensayo en el cual se extrae mediante una fuerza de compresión una fibra de la matriz que lo contiene.
Softening: ablandamiento (por deformación)

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 17
Capítulo 1 Introducción y Antecedentes

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 18
Capítulo 1 Introducción y Antecedentes
1.1 Introducción
En la búsqueda de mejores desempeños de los materiales, han surgido en las últimas
décadas los materiales compuestos. Estos materiales tienen muchos usos en la industria
aeroespacial y automotriz dada sus mejoradas propiedades físicas y mecánicas. La
investigación de estos materiales busca evaluar varios aspectos, entre ellos, fabricación,
procesamiento, diseño y caracterización de su desempeño. Para este último aspecto se
utilizan modelos y simulaciones computacionales así como también ensayos experimentales.
Los ensayos mecánicos proveen a las simulaciones numéricas de las propiedades mecánicas
necesarias para efectuar el modelado computacional.
El modelado de la falla en los materiales compuestos, puede efectuarse mediante el
uso de los conceptos de la micromecánica o a través de leyes cohesivas. Las leyes cohesivas
pertenecen a un grupo de modelos, llamados fenomenológicos, que no dependen de un
mecanismo de falla específico. Emplean un modelo material, el cual es representado por una
ley de tracción‐separación que describe la pérdida de capacidad de carga del material en
función de la separación independientemente de los detalles físicos del daño que ocurra
realmente en el material (Schwalbe, Scheider, & Cornec, 2009).
Una de las ventajas de utilizar las leyes cohesivas como modelos de falla, es su
independencia del tamaño de la malla usada en el modelado. Además solo precisa de dos
parámetros para su aplicación (separación crítica o desplazamiento máximo y tracción
máxima o resistencia cohesiva. Esta y otras ventajas fueron el motivo de su elección para
este trabajo de Tesis.
Entra las variadas formas de falla de un material compuesto, se decidió analizar el
comportamiento del material compuesto al despegado de la interface fibra‐ matriz.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 19
Objetivo General
Como objetivo general de la presente Tesis, se planteó obtener una herramienta
computacional alternativa para resolver problemas de materiales compuestos continuos
reforzados con fibra. Este estudio conlleva implícito una descripción adecuada del modelo
atriz‐fibra‐medio cohesivo. m
Objetivos particulares
1) Entre los objetivos particulares, se buscó desarrollar e implementar Modelos de
Material Compuesto Matriz‐Fibra con Ley Cohesiva incluyendo Corte, Fricción y Esfuerzo
Normal Acoplados:
a. Analizar e incorporar el algoritmo con distintas leyes para la zona cohesiva.
b. Implementar el modelo material al programa MED de elementos discretos.
Dicho programa en codificación FORTRAN fue desarrollado en la UFRGS y se
continúa actualizando en la UNNE. Para eso se pretende modificar el modelo
planteado hasta ahora y tras implementarlo computacionalmente en el programa,
verificar su buen funcionamiento.
c. Validar el modelo a través de ejemplos representativos.
d. Comparación de resultados de la simulación computacional, con otras
simulaciones obtenidas con implementación del modelo en otros programas,
incluyendo los efectuados con método de elementos finitos.
2) Otro objetivo particular fue la obtención de una herramienta alternativa al MEF para
la resolución del problema de la caracterización del comportamiento del proceso de
separación de la superficie de adherencia fibra matriz.
a. Utilizar el método de los elementos discretos para la resolución del problema.
Dicha elección se fundamenta en su fácil y rápida implementación computacional,
sin perder la precisión en los resultados. Además esta herramienta, al contrario del
MEF, no está limitada a medios continuos, pudiendo aplicarse con comodidad en el
caso de la fractura, donde existe separación o división de la materia.
b. El estudio del comportamiento mecánico de los materiales compuestos es
importante para poder establecer modelos que puedan prever su comportamiento

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 20
bajo carga. La mejora en el estado de este conocimiento se traduce en mejores
diseños de estos materiales, tan importantes en la industria humana.
c. Se pretende mejorar también el actual estado de conocimiento de la
influencia de la adhesión en la interface fibra‐matriz sobre el comportamiento de
falla de los materiales compuestos.
Organización del Trabajo
La presente Tesis está dividida en cinco capítulos principales. En el capítulo 1 se
expone una introducción al problema junto con los objetivos del trabajo, luego se presenta
una reseña bibliográfica de los temas más importantes vinculados a los antecedentes más
relevantes relacionados con el tema propuesto: Mecánica de Fractura, Materiales
Compuestos, Resistencia al Despegado y Ensayos de Extracción de Fibra (Pullout y Pushout).
En el Capítulo 2 se muestra una revisión bibliográfica de las Leyes Cohesivas,
mostrando las ecuaciones utilizadas para su modelado, así como también su clasificación y
los aspectos a tener en cuenta para carga combinada.
En el Capítulo 3 se efectúa una introducción a la metodología utilizada para efectuar
el modelado. Se hace una breve reseña del Método de los Elementos Discretos, incluyendo
antecedentes, formulación del método, rigidez de las barras, solución de la ecuación de
equilibrio, relación constitutiva e integración por diferencias finitas. Finalmente se exponen
las ecuaciones utilizadas para el modelado de la Ley Cohesiva Desacoplada y Acoplada.
En el capítulo 4 se efectúa el análisis y verificación de resultados. Se muestran los
resultados de las simulaciones numéricas de los ensayos de pushout y pullout utilizando
leyes cohesivas, para carga combinada, desacoplada y acoplada. Se analiza además la
influencia de la variación de tres parámetros adimensionales en un estudio paramétrico que
incluyen el coeficiente de fricción, la resistencia interfacial y la relación de módulos de
elasticidad.
Finalmente en el capítulo 5 se presentan las conclusiones obtenidas a través de la
investigación y se proponen algunas recomendaciones para trabajos futuros de investigación
vinculados al tema.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 21
1.2 Mecánica de Fractura
La Mecánica de Fractura busca parámetros que caractericen la propensión a
extenderse de una fisura. Tal parámetro debería permitir relacionar los resultados de
laboratorio con el desempeño estructural, de tal manera que la respuesta de una estructura
con fisuración pueda ser predicha a partir de los datos de los ensayos de laboratorio. Si se
llama a tal parámetro la fuerza directriz de fisuración se debería poder determinar esa fuerza
como una función del comportamiento del material, tamaño de la fisura, geometría
estructural y condiciones de carga. Por otro lado, el valor crítico de este parámetro, el cual
se toma como una propiedad del material, debe ser determinado de los ensayos de
laboratorio. El valor crítico de dicha fuerza, conocida como tenacidad a la fractura (fracture
toughness), expresa la habilidad del material para resistir la fractura en presencia de fisuras.
Relacionando en una ecuación esta fuerza con la tenacidad a la fractura se obtiene una
relación entre carga aplicada, tamaño de la fisura y geometría estructural que brinda la
información necesaria para el diseño estructural.
Es entonces introducido en el diseño estructural un parámetro adicional del material,
la tenacidad a la fractura, mediante la metodología de la Mecánica de Fractura. Este
parámetro es usado para evaluar el potencial del material para resistir la fractura dentro del
marco de la Mecánica de Fractura, de la misma manera que la fluencia o la resistencia última
evalúa la resistencia del material a la fluencia o fractura en el criterio convencional de
diseño. En la selección de materiales para aplicaciones estructurales se debe elegir entre
materiales con una alta resistencia a la fluencia, pero comparativamente con baja tenacidad
a la fractura, por un lado, o con baja resistencia la fluencia pero con alta tenacidad a la
fractura por otro lado.
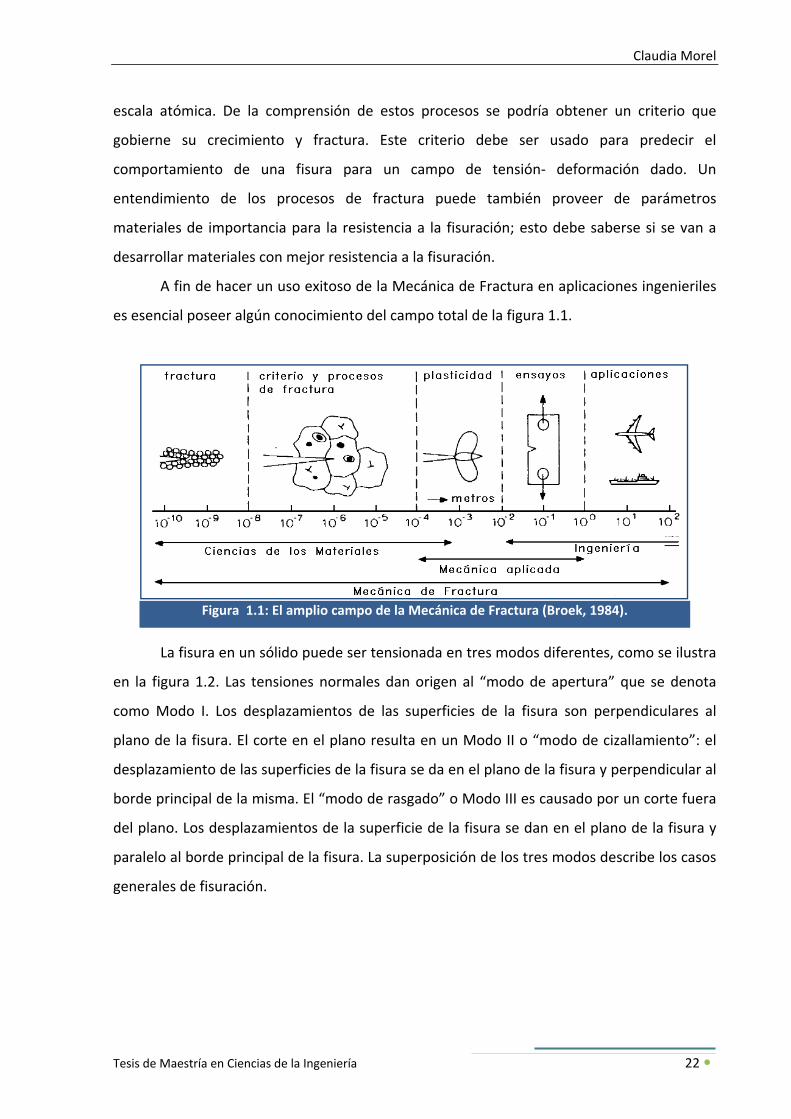
En la figura 1.1 se representan varias disciplinas (Broek, 1984), todas ellas están
involucradas en el desarrollo de los procedimientos de diseño de la Mecánica de Fractura. En
el extremo derecho de la escala se encuentra el análisis carga‐tensión ingenieril. La
mecánica aplicada provee los campos de tensión en el extremo de la fisura así como también
las deformaciones elásticas y plásticas (hasta cierto punto) del material en la vecindad de la
fisura. Las predicciones hechas sobre la resistencia a la fractura pueden ser verificadas
experimentalmente. La Ciencia de los Materiales se ocupa de los procesos de fractura en la
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 22
escala atómica. De la comprensión de estos procesos se podría obtener un criterio que
gobierne su crecimiento y fractura. Este criterio debe ser usado para predecir el
comportamiento de una fisura para un campo de tensión‐ deformación dado. Un
entendimiento de los procesos de fractura puede también proveer de parámetros
materiales de importancia para la resistencia a la fisuración; esto debe saberse si se van a
desarrollar materiales con mejor resistencia a la fisuración.
A fin de hacer un uso exitoso de la Mecánica de Fractura en aplicaciones ingenieriles
es esencial poseer algún conocimiento del campo total de la figura 1.1.
Figura 1.1: El amplio campo de la Mecánica de Fractura (Broek, 1984).
La fisura en un sólido puede ser tensionada en tres modos diferentes, como se ilustra
en la figura 1.2. Las tensiones normales dan origen al “modo de apertura” que se denota
como Modo I. Los desplazamientos de las superficies de la fisura son perpendiculares al
plano de la fisura. El corte en el plano resulta en un Modo II o “modo de cizallamiento”: el
desplazamiento de las superficies de la fisura se da en el plano de la fisura y perpendicular al
borde principal de la misma. El “modo de rasgado” o Modo III es causado por un corte fuera
del plano. Los desplazamientos de la superficie de la fisura se dan en el plano de la fisura y
paralelo al borde principal de la fisura. La superposición de los tres modos describe los casos
generales de fisuración.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 23
Figura 1.2: Los tres modos de fisuración (Broek, 1984).
Resumiendo:
• Fractura Modo I – Modo de apertura (Se produce un esfuerzo tensional
perpendicular a la grieta)
• Fractura Modo II – Modo de cizallamiento (Esfuerzos tangenciales actúan paralelos a
las caras en la grieta pero en direcciones opuestas)
• Fractura Modo III – Modo de rasgado (Esfuerzos tangenciales que actúan paralelos
pero perpendiculares a la cara de la placa y opuestos entre sí)
Griffith (1921), (1924) con sus trabajos dio una sólida explicación del efecto del
tamaño de la fisura y forjó las fundaciones de la nueva teoría de fractura de los sólidos
(Gdoutos, 2005).
En este marco se puede notar que la predicción de la evolución de la falla es una
tarea difícil. Considerando el tamaño de la zona del proceso de falla, podemos establecer
una primera clasificación. Cuando esta es muy pequeña en comparación con todas las
medidas relevantes de un componente (incluyendo, el tamaño de la fisura), la zona del
proceso de falla es pequeña en comparación con el tamaño del campo de tensiones del
extremo cercano a la fisura (el conocido como zona K dominante). Luego la resistencia
puede ser predicha por la Mecánica de Fractura lineal elástica (MFLE en inglés LEFM). La
resistencia depende del tamaño de la falla crítica, y la fractura puede ser clasificada como
“frágil”. En contraposición, si el tamaño de la zona de proceso de falla es más grande que las
dimensiones relevantes del componente, la resistencia es dependiente solo débilmente del

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 24
tamaño de la falla y puede ser expresado en términos del criterio de tensión de falla. Este
comportamiento es llamado fractura “dúctil”. Para el caso intermedio donde la zona del
proceso de falla es comparable o más grande que algunas dimensiones de longitud (ej.
Tamaño de la fisura), la predicción de la resistencia requiere el modelado de la zona del
proceso de falla. Esto puede hacerse mediante la llamada ley cohesiva. La ley cohesiva es la
relación entre, σ, la tensión a lo largo de la zona de proceso de falla y su separación, δ,
durante un incremento monótono en δ. Es común suponer que la tensión cohesiva depende
solo de la apertura local, σ (δ), y que la apertura crítica, δc, existe más allá de donde la
tensión cohesiva se desvanece. El método de la ley cohesiva es particularmente atractivo
para modelar zonas de proceso de falla que son largas en una dimensión pero pequeñas en
la dirección perpendicular. Este tipo de zona es llamada a veces puenteado a gran escala
(large scale bridging, LSB).
Si bien el concepto de ley cohesiva se originó en los primeros años de la década del
60 del siglo pasado, el concepto ha ganado uso sólo en los últimos años. Ejemplos de
problemas que involucran zonas de proceso a gran escala que han sido analizados con los
modelos cohesivos son fisura por puenteado (crack bridging) en compuestos de matriz
cerámica y falla en estructuras de concreto. En conclusión para materiales que experimenten
zonas de proceso a gran escala, las leyes materiales tomadas como leyes constitutivas son
las leyes tensión‐deformación y las leyes cohesivas. Como se indica en la figura 1.3, estas
leyes materiales pueden ser obtenidas experimentalmente o por modelado micromecánico
(Sørensen & Jacobsen, 2003).
Figura 2.3: Ley cohesiva y tensión deformación, elementos clave
en el análisis de estructuras (Sørensen & Jacobsen, 2003).

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 25
1.3 De la fabricación y procedencia de los materiales compuestos
Una de las aplicaciones más importantes de las leyes estudiadas dentro la Mecánica
de Fractura es en el área de los materiales compuestos: son aquellos que se componen de
dos materiales distintos, uno constituye la fase llamada matriz y el otro se halla en general
en forma de fibras dispersas dentro del otro material como refuerzo. Esta dualidad presenta
capacidades de aplicación avanzadas en la industria aeroespacial, automotriz, electrónica,
etc. En muchos casos el desempeño de los compuestos, materiales que surgen de la
incorporación de materiales más fuertes y más rígidos como refuerzo en matrices metálicas,
es superior en términos de mejoradas propiedades físicas, mecánicas y térmicas (módulo y
resistencia específica, estabilidad a alta temperatura, conductividad térmica).
Esta renovada calidad se hace evidente en la demanda dentro de la industria, que
requiere materiales que posean propiedades superiores a los de las aleaciones conocidas.
Ghosh (1993) menciona que específicamente los beneficios de los materiales
compuestos cuya matriz sea metálica incluyen:
• Incremento de la resistencia y rigidez por densidad unitaria, lo que
reduce el peso estructural y aumenta el desempeño.
• Una disminución en el coeficiente de expansión térmica lo que reduce
las deformaciones térmicas en estructuras sometidas a ciclos termales.
• Resistencia a la fluencia lenta aumentada, alta conductividad.
Para producir un material compuesto se pueden utilizar procesos en estado sólido o
procesos en estado líquido (Ghosh, 1993). Los procesos en estado sólido son los que
generalmente se utilizan pata obtener las más altas propiedades mecánicas, ya que los
efectos de segregación y la formación de productos de la reacción frágil son mínimos,
comparados con los procesos de estado líquido.
En este contexto se ha estudiado la reactividad interfacial. Hasta el momento no
existe un criterio establecido para optimizar la interface desde el punto de vista de las
propiedades del material compuesto, aunque ha habido gran progreso en la Mecánica de
Fractura de la interface y de la incidencia de las propiedades de la interface en las
propiedades del material compuesto.
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 26
La mejora en la interface de compuestos de matriz metálica ha sido en su mayoría
producto de diseños empíricos. La gran cantidad de variables y parámetros que deben ser
tenidos en cuenta explica las innumerables preguntas aún pendientes a resolver en esta
área.
Dos aspectos críticos en estudio son la identificación de los parámetros que vinculan
al desempeño del material compuesto con la interface estructural y energética y la
necesidad de entender el rango completo de estrategias disponibles para controlar estos
parámetros incluyendo el rol de la reacción química interfacial.
Un método para controlar las reacciones interfaciales (a veces costoso) es cubrir el
refuerzo con una barrera inerte para protegerlo durante el proceso de fabricación del
material compuesto.
Las deformaciones elásticas o tensiones que existen dentro de un material en estado
de equilibrio en la ausencia de cargas externas son llamadas tensiones residuales. Estas se
clasifican en tres grupos (Bourke, Goldstone, Stout, & Needleman, 1993). Tensiones Tipo I:
actúan en distancias milimétricas y son referidas como macroscópicas. Surgen de diferentes
tasas de enfriado dentro del espécimen que ha sido previamente soldado o fresado.
Aquellas que actúan en longitudes de la microestructura (típicamente 1 a 100 μm) son
llamadas tensiones residuales Tipo II. Interacciones intergranulares entre el refuerzo y la
matriz metálica típicamente resultan en tensiones Tipo II.
Aquellas tensiones que existen a escala atómica y varían sobre granos individuales
son descriptas como Tipo III.
Su control es importante ya que sus efectos asociados son disminución en la
resistencia a la fatiga, delaminado (ply delamination), distorsión de la forma y corrosión
acelerada. Propiedades mecánicas como la resistencia a la fluencia o la tenacidad a la
fractura pueden ser afectadas en la presencia de tensiones residuales.
1.4 Resistencia al Despegado (Debond Resistance)
Las variables energéticas que se utilizarán en este capítulo, son esencialmente las
mismas usadas por Irwin (1960) y Griffith (1921).
Las fisuras suelen producirse cuando una pieza ensayada está aún en estado elástico,
la deformación inelástica se localiza en capas finas debajo de las superficies de las fisuras.
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 27
Teniendo en cuenta esto, se puede dividir la energía total suministrada por la carga aplicada
en (1) energía elástica guardada en la pieza y (2) el calor disipado por el flujo plástico y la
energía residual guardada en las capas que se forman debajo de la superficie de la fisura. De
(1) proviene la definición de la fuerza de despegado impulsora G, y de (2) proviene la
resistencia al despegado Γ. La idea esencial de Irwin y Griffith se muestra en la figura 1.4
(Zhigang Suo, 1993). Los procesos inelásticos tales como la separación atómica,
transformaciones de fase (phase transformations) y movimiento de dislocación (dislocation
motion), requieren altas tensiones para activarse, de esta manera son confinadas a una
región cerca de la punta de la fisura donde la tensión se intensifica.
A medida que el frente de la fisura se extiende, debajo de la superficie de la fisura se
desprenden finas capas en la estela en la cual los átomos han pasado movimientos
irreversibles. Los procesos cerca de la punta son complejos y su cuantificación requiere
conocimiento detallado de los mecanismos de deformación. Sin embargo, se logra un estado
de deformación uniforme a lo largo de la estela. Considere dos cilindros de sección
transversal unitaria normal a la interface, una lejos del frente de la fisura y otro más atrás
(B). Sea D el desplazamiento, F la fuerza aplicada y Γ la energía ocupada en transformar el
cilindro A al cilindro B. Esta energía depende de la historia de deformación que el cilindro B
ha pasado, incluyendo energía de superficie, disipación calórica y energía elástica (Zhigang
Suo, 1993).
La variación de energía total, tanto elástica como inelástica está dada por:
F.dD – G dA + Γ dA = 0 Ec. (1.1)
Cuando D se mantiene fijo no se aplica trabajo externo a la pieza ensayada y la
energía total permanece sin cambios de tal manera que
G = Γ Ec. (1.2)
La fuerza generadora G depende del tipo de ensayo y puede ser evaluada por un
análisis de tensión elástico. La resistencia a la fractura depende de los mecanismos
inelásticos. La ecuación 1.2 provee una conexión entre la condición de carga macroscópica
del ensayo y del proceso inelástico microscópico asociado con el despegado (debonding).

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 28
Figura 1.4: Procesos inelásticos que acompañan el
despegado (Zhigang Suo, 1993).
La resistencia al despegado puede ser medida fenomenológicamente. Por ejemplo,
esto puede ser llevado a cabo usando el experimento de pushout (en español ensayo de
extracción de fibra por compresión) mostrado en la Figura 1.5. Este ensayo se describe con
más detalle en el capítulo 1.4.
La tensión requerida para llegar al despegado se mide, y se la puede utilizar para el
cálculo de la energía.
Figura 1.5: Esquema de ensayo de pushout en un material compuesto
(Lin, Geubelle, & Sottos, 2001).

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 29
Esta metodología es puramente fenomenológica ‐ no se requiere conocimiento
detallado del proceso físico, ni tampoco se genera tal conocimiento. Sin embargo, la
cantidad clave, resistencia al despegado Γ, es medida y esto puede ser utilizado en el diseño
del dispositivo. La resistencia al despegado ha sido medida para una amplia gama de
materiales compuestos para aplicaciones a placas delgadas y compuestos fibra‐matriz
(Evans, Ruhle, Dalgleish, & Charalambides, 1990), (Cannon, Dalgleish, Dauskarft, & etal,
1992).
En principio, ensayos de cualquier geometría pueden ser usados para medir la
resistencia al despegado. Varias geometrías convenientes se esquematizan en la Figura 1.6.
Figura 1.6: Geometrías convenientes para medir la resistencia al
despegado (Zhigang Suo, 1993) .
Se ha observado experimentalmente que la resistencia al despegado depende de la
geometría del ensayo.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 30
Específicamente, la resistencia al despegado depende de la razón entre las cargas de
deslizamiento y normal parametrizadas por ψ:
Γ = Γ (ψ) Ec. (1.3)
La tendencia de la curva se muestra en la figura 1.6. La viga cantiléver doble es
predominantemente de modo en apertura (ψ ≈ 0º) y la resistencia al despegado medida es
baja. En el ensayo de pullout el corte es dominante (ψ ≈ 70º), dando una resistencia al
despegado alta. Los otros dos, la flexión en cuatro puntos y la microidentación, producen
cantidades casi iguales de apertura y corte (ψ ≈ 45º), son representativas de las condiciones
en la delaminación de placas delgadas y despegado fibra‐matriz.
La dependencia de Γ en la fase de carga puede ser entendida sobre la base de
mecanismos inelásticos. Por ejemplo, el ensayo de pullout es dominado por el corte y al
mismo tiempo la fricción se suma a la resistencia al despegado.
Este mecanismo ha sido examinado cuantitativamente por Hutchinson y Evans
(1989). En interfaces metal/cerámica, la carga corte dominante produce zonas plásticas más
owd, Stout, & Shih, 1992) . grandes que incrementan la resistencia al despegado (O’D
1.5 De los ensayos de Pullout y Pushout
Los ensayos de pushout y pullout (en español ensayos de extracción de fibra por
compresión y por tracción respectivamente) son los más frecuentemente utilizados para
obtener las propiedades interfaciales. El ensayo consiste en tirar o empujar una sola fibra
hacia fuera de la matriz que lo contiene. Se efectúa sobre una delgada porción de material
compuesto, midiendo la fuerza aplicada y el desplazamiento que se produce. La curva
tensión –desplazamiento obtenida durante el experimento se relaciona con la rigidez
interfacial modo II y el coeficiente de fricción entre la fibra y la matriz (suponiendo la fricción
de Coulomb) y ajustando los datos ya sea a una solución analítica o a una solución por otros
métodos de cálculo.
Cuando una fisura se propaga en un material compuesto en una dirección
perpendicular a la de las fibras de refuerzo, el proceso de falla es bastante complejo y

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 31
típicamente implica fisuración de la matriz, despegado fibra‐matriz, extracción de la fibra y
rotura de la fibra. De estos cuatro mecanismos, el despegado fibra‐matriz y la extracción
friccional de la fibra son generalmente consideradas como las más importante fuente de
disipación de energía y por ello han sido el foco de la mayoría de los esfuerzos en las
investigaciones.
Para caracterizar mejor estos dos procesos de falla, varios investigadores han
conducido ensayos de pullout y pushout sobre un modelo de material compuesto (Fig. 1. 5)
utilizando un sistema de una sola fibra.
En estos ensayos la fibra se extrae o tira (pullout) o bien se empuja (pushout)
lentamente de la matriz circundante (Lin, Geubelle, & Sottos, 2001), (Bechel & Sottos,
1998b), midiéndose la carga aplicada y el desplazamiento de la fibra (Laughner, 1986),
(Netravali, 1989), (Brun & Singh, 1988), (Warren, 1992). Se mencionan los trabajos de otros
investigadores tales como Koss (1993), Eldridge (1995), Jero, Kerans (1990), Cordes (1995),
Mackin (1992) , Daniel (1993),Tsai y Kim (1991), (1996), Watson y Clyne (1992), Atkinson
(1982) que efectuaron ensayos mecánicos de pushout sobre materiales compuestos
utilizando distintas metodologías para medir estos parámetros.
Los parámetros de la interface, tales como la resistencia a la fractura y el coeficiente
de fricción, son extraídos de la evolución de la carga aplicada sobre la fibra (P) y el
desplazamiento resultante (Δp) y de las observaciones de la propagación del frente
despegado. Una curva fuerza‐desplazamiento típica obtenida de un ensayo de pushout se
muestra en la figura 1.7.
Figura 1.7: Curva carga‐desplazamiento típica obtenida
en ensayos de pushout (Lin, Geubelle, & Sottos, 2001)

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 32
Esta curva también es conocida por otros nombres tales como curva carga‐
separación o carga‐desplazamiento.
En la etapa inicial (I) se mide una respuesta lineal correspondiente a una perfecta
adhesión fibra‐matriz. A medida que la carga se incrementa, surge una fisura desde la punta
del espécimen y empieza a propagarse al o largo de la interface, llevando a una relación no
lineal fuerza‐desplazamiento (II). El proceso de despegado es inicialmente estable, pero a
medida que la longitud de la fisura alcanza un valor crítico, el proceso de falla se vuelve
inestable y llega a un abrupto y completo despegado de la fibra de la matriz. Esta
inestabilidad es seguida por un deslizamiento friccional de la fibra fuera de la matriz
circundante (III).
La descripción mencionada es representativa de muchos experimentos, aún así debe
ser modificada en algunos casos para explicar las variaciones en el despegado y
deslizamiento. Por ejemplo, para un rango de sistemas materiales que poseen una gran
diferencia en sus rigideces, la fisura en vez de iniciarse desde la superficie superior del
espécimen, lo hace desde la parte inferior (Bechel V. , 1997), (Bechel & Sottos, 1998b),
(Bechel & Sottos, 1998c). Otro ejemplo concierne el tipo de despegado y el proceso de
deslizamiento, puede ser continuo a medida que se inicia la fisura desde un extremo de la
fibra y se expande progresivamente a lo largo de toda la longitud de la fibra (Bechel &
Sottos, 1998b), (Tsai, 1996) , o puede ser discontinua a medida que una zona de
deslizamiento en forma dislocada se propaga a lo largo de la interface fibra‐matriz de una
manera similar a las ondas de Schallamach (1971) observadas en materiales parecidos a la
goma que se deslizan sobre una superficie dura. Dependiendo de la rugosidad de la
superficie de la fibra y de la amplitud de las tensiones de compresión residuales que actúan
sobre la interface, el proceso de deslizamiento (III) puede ser continuo o supone un proceso
de punzamiento y deslizamiento.
Se han conducido varias investigaciones analíticas para interpretar estos
experimentos. Una de las propuestas más conocidas está basado en la teoría de “Shear Lag”
Shetty (1988), Hutchinson & Jensen, (1990). Esta proposición implica las siguientes
suposiciones: la carga axial actuante sobre la fibra es transmitida a la matriz únicamente a
través de tensiones de corte actuando sobre la interface, los efectos de superficie o de borde
son despreciados, la tensión radial de compresión (residual) se supone uniforme, y el frente

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 33
del despegado se inicia desde la parte superior de la muestra, no desde la base. Aunque de
alguna manera restringido a estas suposiciones, el tratamiento analítico de los ensayo de
pullout y pushout tienen la ventaja de proveer una solución cerrada del problema,
permitiendo una rápida caracterización de los efectos de los muchos parámetros que entran
en el problema tales como la longitud de la fibra y radio, las tensiones residuales inherentes
al procesamiento, el coeficiente de fricción y la disparidad de módulos de la fibra y la matriz.
Sin embargo, como ha sido demostrado por Bechel & Sottos (1998b) y (1998), despreciando
estos efectos la teoría “shear‐lag” tiende a subestimar la longitud de despegado observada
en la segunda etapa del experimento y por lo tanto sobre‐predecir la resistencia a la fractura
de la interface. Aún así, esta teoría es en algunos casos fructuosa en extraer el coeficiente de
fricción de la parte inicial de la etapa III de la curva fuerza‐desplazamiento.
Otras técnicas analíticas han sido también utilizadas para verificar los experimentos
de pullout y pushout. Liang & Hutchinson (1993) utilizaron el método de los elementos
finitos para determinar el rango de validez del método Shear‐Lag. Kallas et al (1992) también
adoptaron el esquema de los elementos finitos para computar la distribución de tensiones
correspondiente al ensayo de pushout cuando la fibra y la matriz están completamente
adheridas. El mismo método numérico fue también usado por Beckert y Lauke (1995) y por
Chandra y Ananth (1995) para extraer propiedades de falla de la interface. Freund (1991)
resolvió la ecuación integral diferencial que gobierna la tensión axial en la fibra para estudiar
el deslizamiento de una fibra en un hoyo en un material elástico. En su simulación por
elementos finitos de una barra rígida extraída de una matriz elástica, Povirk y Needleman
(1993) usaron un modelo friccional dependiente de la tasa y estado para capturar el
deslizamiento friccional en forma dislocada de la fibra mencionado anteriormente. El efecto
de modelos de fricción más complejos es también el tópico de investigaciones analíticas
presentadas por Tsai y Kim (1996).
Mientras que la mayoría del trabajo analítico existente ha focalizado en el
deslizamiento friccional de la fibra despegada (etapa III), Lin et al (2001) procuran capturar la
falla progresiva de la interface fibra ‐matriz y el contacto friccional asociado de la nueva
superficie de fractura creada (etapa II). De manera distinta al método Shear –Lag, el método
usado en su trabajo captura las concentraciones de tensiones asociadas con efectos de

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 34
borde y con el frente de fisura en avance. El método se puede aplicar tanto para problemas
de pullout como de pushout.
El método utilizado por Lin et al es una versión axisimétrica del sistema de elementos
finitos cohesivo/volumétrico (CVFE) que recientemente ha sido usado por varios
investigadores en el modelado de eventos de fractura cuasi‐estáticos y dinámicos que
impliquen la iniciación, propagación y/o detención de fisuras. Particularmente utilizan un
sistema CVFE que comprende un modelo cohesivo bilineal independiente de la tasa,
acoplado con el elemento de contacto friccional.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 35
Capítulo 2 Teoría
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 36
Capítulo 2 Teoría
2 .1 Leyes cohesivas
Como se ha mencionado anteriormente, los materiales compuestos reforzados con
fibras han ganado protagonismo en estos últimos tiempos en el área de las aplicaciones
ingenieriles debido a que posee flexibilidad para obtener las propiedades mecánicas y
físicas deseadas en combinación con componentes livianos. Esta es la razón por la cual se
utilizan ampliamente en la industria aeroespacial y otras aplicaciones donde se requiera alta
resistencia y relaciones rigidez‐peso altas. En general estos materiales son usualmente
hechos de vidrio, grafito, boro, y otras fibras dentro de una matriz. La aplicación ingenieril de
estos materiales es importante porque son las aplicaciones las que determinan y dirigen en
general el foco de las investigaciones.
Modelar este tipo de materiales no es tarea fácil. Lo compuestos de fibra son
heterogéneos y poseen varios tipos de fallas inherentes. La falla de los compuestos de fibra
generalmente es precedida por una acumulación de diferentes tipos de daños internos. Los
mecanismos de falla a escala micromecánica incluyen quiebre de la fibra, fisuración de la
matriz, y despegado de la interface. Varían con el tipo de carga y están íntimamente
relacionadas con las propiedades de sus constituyentes, i.e. fibra, matriz e interface
(Gdoutos, 2005).
Los mecanismos básicos de fractura que influencian la respuesta constitutiva y la
Resistencia a la fractura de los compuestos fibra matriz pueden ser clasificados de manera
general en tres grupos (Needleman, Nutt, Suresh, & Tvergaard, 1993):
1. Falla por nucleación, crecimiento y fusión de vacios en la matriz,
2. Falla de la fibra
3. Despegado y fractura a lo largo de la interface entre la matriz y la fibra
El grado en el cual estos mecanismos de falla influencia individual y colectivamente la
resistencia general a la deformación y fractura es fuertemente dictaminada por factores tan
diversos como:
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 37
1. El tamaño, forma, concentración y distribución espacial de la fibra.
2. La concentración de impurezas presentes en las fases constituyentes
de los compuestos.
3. La fabricación y los procedimientos de calor incluyendo tratamientos
de envejecimiento (aging treatments) a los cuales los compuestos están sujetos
anteriormente a la carga mecánica.
4. El ambiente térmico y químico en el cual las propiedades mecánicas
son evaluadas.
5. Los recubrimientos (coatings), si hubiera, aplicados al refuerzo con el
objetivo específico de modificar las características interfaciales.
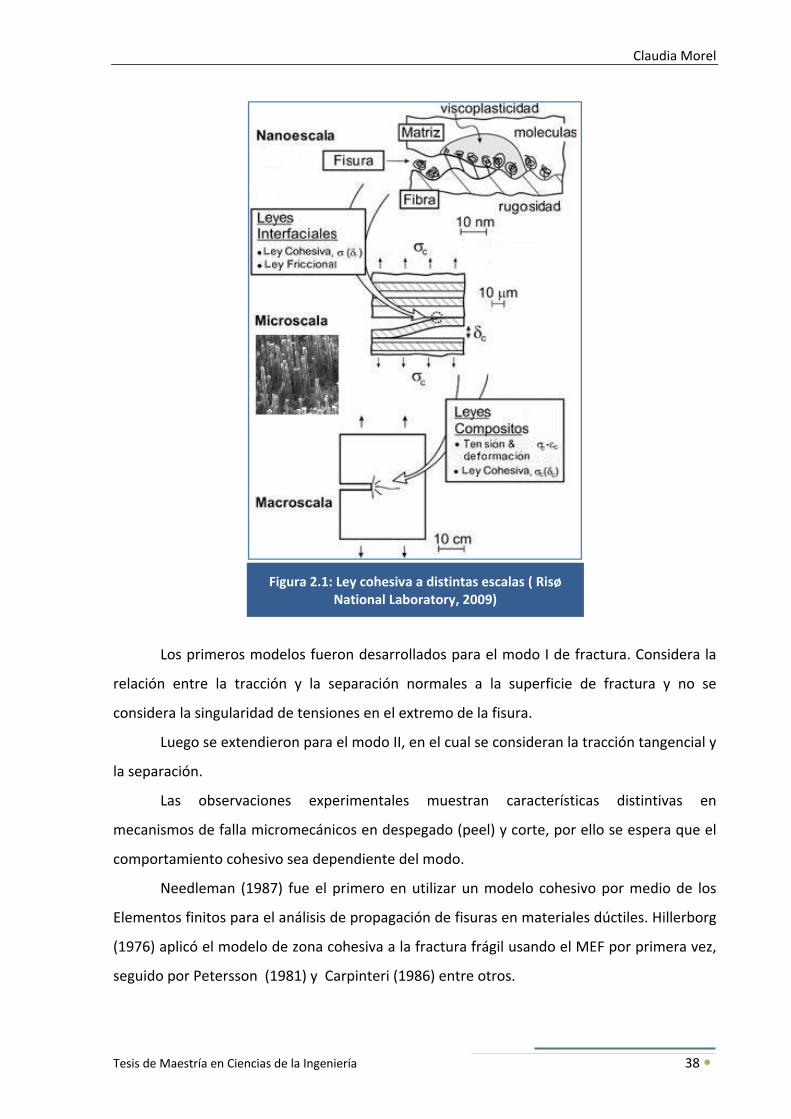
La ley interfacial es la caracterización del comportamiento mecánico de la interface
fibra/matriz en la microescala en términos de algunas leyes mecánicas bien definidas. La
zona del proceso de falla en el extremo de la fisura interfacial se caracterizará en términos
de leyes cohesivas y el deslizamiento friccional se caracterizará en términos de leyes
friccionales, ver figura 2.1.
La ley interfacial representa la respuesta mecánica de la interface (química,
rugosidad de la superficie) conectando las superficies en la microescala. La ley compuesta se
usa en la macroescala para representar la interacción entre la fibra discreta, matriz y fisura
en un modelo continuo donde el compuesto es tratado como un continuo homogeneizado
anisótropo ( Risø National Laboratory, 2009).
Antes de que se forme la fisura física, las dos superficies están unidas por tracción
dentro de una zona cohesiva. La tracción varía en relación al desplazamiento relativo de las
superficies. Las leyes cohesivas describen las actividades en la zona cohesiva en términos de
la tracción y de la separación de las superficies que se forman bajo el proceso de fractura.
También se llama ley de tracción‐separación.
Barenblatt estableció el concepto de describir las actividades cohesivas antes de la
fractura en 1962.
Los modelos cohesivos más recientes son distintos al propuesto por Barenblatt en
que las tracciones son dependientes de la abertura y no de la distancia a la fisura (Brocks,
Cornec, & Scheider, 2003).
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 38
Los primeros modelos fueron desarrollados para el modo I de fractura. Considera la
relación entre la tracción y la separación normales a la superficie de fractura y no se
considera la singularidad de tensiones en el extremo de la fisura.
Luego se extendieron para el modo II, en el cual se consideran la tracción tangencial y
la separación.
Las observaciones experimentales muestran características distintivas en
mecanismos de falla micromecánicos en despegado (peel) y corte, por ello se espera que el
comportamiento cohesivo sea dependiente del modo.
Needleman (1987) fue el primero en utilizar un modelo cohesivo por medio de los
Elementos finitos para el análisis de propagación de fisuras en materiales dúctiles. Hillerborg
(1976) aplicó el modelo de zona cohesiva a la fractura frágil usando el MEF por primera vez,
seguido por Petersson (1981) y Carpinteri (1986) entre otros.
Figura 2.1: Ley cohesiva a distintas escalas ( Risø National Laboratory, 2009)

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 39
La separación del material y a su vez el daño de la estructura se describe mediante
elementos interfaciales, no se dañan elementos continuos en el modelo cohesivo. Usando
esta técnica el comportamiento del material se divide en dos partes, el continuo libre de
daños con una ley material arbitraria y las interfaces cohesivas entre los elementos
continuos, que especifican solo el daño del material.
Los elementos interfaciales se abren cuando ocurre el daño y pierden su rigidez en la
falla de tal manera que los elementos continuos se desconectan. Por esta razón la fisura se
puede propagar solo a lo largo de los bordes del elemento. Si la dirección de la propagación
de la fisura no se conoce de antemano la generación de la malla debe crear diferentes
caminos posibles para la fisura (Brocks, Cornec, & Scheider, 2003).
En aplicaciones numéricas, existen tres técnicas principales para modelar la capa
adhesiva (Högberg, 2006):
1. La capa adhesiva es modelada como una interface entre cuerpos conjuntos.
En este caso la ley cohesiva considera solo la energía de fractura intrínseca debido a la
separación. De esta forma el efecto debido al espesor de la capa es ignorado (Pantano &
Avrill, 2004).
2. La capa es modelada como un continuo elastoplástico con parámetros de
fractura. Esta técnica de modelado usa los parámetros materiales del adhesivo como un
material con volumen. La ley cohesiva está basada en las propiedades de fractura del
adhesivo voluminoso y el proceso de fractura se supone que inicia en una fisura introducida
en el adhesivo (Tvergaard & Hutchinson, 1996).
3. La capa es modelada como una interfase con un espesor. Se usa una ley
apa (Salomonsson, 2002 ). cohesiva que describe la respuesta macroscópica de la c
2.2 Clasificación de las leyes cohesivas.
La separación de las interfaces cohesivas se calcula a partir del “salto” en el
desplazamiento [u], i.e. la diferencia de los desplazamientos de los elementos continuos
adyacentes,
Δ = [u] = u+ ‐ u‐ Ec. 2.2

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 40
Esta es la expresión en coordenadas globales, pero se suele utilizar con mayor
frecuencia la expresión en coordenadas locales, distinguiendo la separación normal ΔΝ de la
separación tangencial ΔT. La separación depende de las tensiones normal y tangencial
respectivamente actuantes sobre la superficie de la interface. Cuando la componente
tangencial o normal de la separación alcanza un valor crítico, ΔCT o ΔC
N respectivamente el
elemento continuo inicialmente conectado por este elemento cohesivo se desconecta lo que
significa que el material en este punto ha fallado.
Para problemas tridimensionales, existen dos direcciones para la separación
tangencial, que se denotan como ΔT1 y ΔT2. Si se utilizan materiales isótropos esta distinción
no es necesaria. Se puede definir una separación tangencial por:
∆ ∆ ∆ ∆ Ec. 2.3
Además de la separación crítica ΔCT o ΔC
N, la tracción máxima (tensión en la superficie
del elemento continuo), Tmax, se usa como un parámetro de fractura, llamado resistencia
cohesiva. El valor de Tmax solo describe el valor máximo de la curva tracción‐separación T (δ)
en adelante denotada como ley cohesiva. Al igual que las separaciones, las tensiones T
pueden también actuar en una dirección normal y otra tangencial llevando a una fractura
normal o de corte respectivamente (Brocks, Cornec, & Scheider, 2003). La forma de la curva
T (δ) se supone que es una ley cohesiva independiente del material y es definida de diversas
formas por distintos autores. Común a todas ellas es:
• Contiene los dos parámetros materiales Tmax y δmax
• Para la falla total la tensión se hace cero T(δ>δmax) 0 tanto para la
separación normal como para la tangencial
La integración de la tracción a lo largo de la separación, ya sea en dirección normal o
tangencial, da la energía disipada por los elemento cohesivos, Γmax. Este tercer parámetro
puede ser determinado por:
Γ Ec. 2.4

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 41
Si los dos modos de separación, normal y tangencial, ocurren simultáneamente existe
una influencia de la separación normal sobre las tracciones tangenciales y viceversa. La
descripción de este caso, se lo denomina como “modo combinado” (mixed mode).
Para analizar procesos de fractura de modo combinado (i.e.: se tienen en cuenta
tanto esfuerzos tangenciales como normales a la superficie) se pueden utilizar dos
aproximaciones:
(a) mediante una ley cohesiva acoplada, o
(b) una ley cohesiva desacoplada.
La tracción normal de una ley cohesiva desacoplada es independiente de la
separación tangencial y la tracción tangencial es independiente de la separación normal.
En una ley acoplada, ambas tracciones dependen tanto del desplazamiento normal
como del tangencial.
Las leyes cohesivas desacopladas se utilizan cuando el proceso de despegado ocurre
bajo un modo‐normal (modo I) o tangencial (modo II) – o cuando uno de ellos es
predominante sobre el otro. Ejemplos de aplicación de leyes desacopladas son el modelado
de “crazing” en polímeros (Tijssens, Van der Giessen, & Sluys, 2000) y fractura de
compuestos de cemento (Tijssens, Sluys, & Van der Giessen, 2001).
Hanson et al. (2004) utilizaron una ley cohesiva lineal desacoplada para analizar el
despegado en modo I de una estructura adherida en forma de sándwich. Li et al. (2005),
usaron una ley rígido‐lineal para predecir la fractura de compuestos de matriz polimérica
bajo cargas de modo I. El modelado del daño por fatiga en interconexiones de soldadura fue
efectuado con una ley cohesiva desacoplada por Abdul‐Baqi et al. (2005).
Högberg (2006) menciona una posible configuración para esta aproximación. En la
figura 2.2 se muestran las leyes teóricas para el modo I (normal) y modo II (corte) en forma
desacoplada. Esta aproximación fue utilizada por Thouless (2006) para simular la carga mixta
sobre una capa de adhesivo. Las relaciones tensión‐separación en modo I (normal) y modo II
(corte) se suponen desacopladas bajo estados de carga mixta. Este modelo ha probado tener
una buena capacidad para capturar las propiedades esenciales de las juntas adhesivas.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 42
Figura 2.2: Ley cohesiva desacoplada utilizada por Thouless et al (2006)
Figura 2.3: Ley cohesiva acoplada de
Tvergaard y Hutchinson (1992)
La mayoría de las leyes cohesivas poseen un acoplamiento (parcial) entre las
direcciones normal y tangencial. Existen dos maneras de lograr este acoplamiento:
(1) haciendo uso de un desplazamiento efectivo y/o
(2) usando parámetros de acoplamiento, que se define a continuación.
Una ley cohesiva acoplada utilizada muy frecuentemente es la desarrollada por
Tvergaard y Hutchinson (1992). Esta ley utiliza un parámetro adimensional de separación
para acoplar ambos modos:
∆ /∆ ∆ /∆ Ec. 2.5
Las tracciones se incrementan hasta alcanzar una meseta y luego disminuyen
linealmente hasta la fractura como puede verse en la figura 2.3. Esta ley cohesiva modela el
proceso de fractura intrínseco dentro de un material o a lo largo de la interface de dos
sólidos.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 43
Dado que el modelo cohesivo es un modelo fenomenológico, no hay evidencia sobre
la forma que debe tomar la ley cohesiva T (δ). De esta manera la ley cohesiva debe
suponerse independiente de un material específico como modelo para el proceso de
separación. Muchos autores toman su propia formulación para la dependencia de la tracción
de la separación.
Como se ha dicho, las zonas cohesivas proyectan todos los mecanismos dentro y
alrededor del extremo de una fisura en la interface, llevando a una relación constitutiva, o
ley de la zona cohesiva, entre la tracción y el desplazamiento de la abertura. Existen una
gran variedad de leyes cohesivas. La mayoría de ellas pueden ser categorizadas en los
siguientes grupos (Bosch van den, Schreurs, & Geers, 2006):
a) Leyes cohesivas polinomiales (Tvergaard, 1990)
b) Leyes cohesivas lineales fragmentadas o trapezoidal (Tvergaard & Hutchinson,
1992))
c) Leyes cohesivas exponenciales (Needleman A. , 1987), (Needleman A. , 1997))
d) Leyes cohesivas rígido‐lineales, también llamada bilineal o lineal decreciente
(Geubelle & Baylor, 1998)
Estas leyes se dibujan esquemáticamente en la figura 2.4. En la línea superior la
tracción normal está dada como una función de la abertura normal y en la inferior la tracción
tangencial como una función de la abertura tangencial.
Se describe a continuación, algunas de las ecuaciones características
correspondientes a las leyes cohesivas de esta clasificación.
La relación de la ecuación 2.5 se introdujo en Tvergaard (1990) junto con la ley
cohesiva polinomial, figura 2.4 (a). Needleman (1987) utilizó una función polinomial de
tercer grado para materiales dúctiles, para modo normal puro, y fue ampliada por
Tvergaard, (1990) para carga mixta. Es una de las leyes cohesivas más utilizadas, ej.
Chaboche, Girard y Levasseaur (1997).
Las tracciones toman la forma general:
1 Ec. 2.6
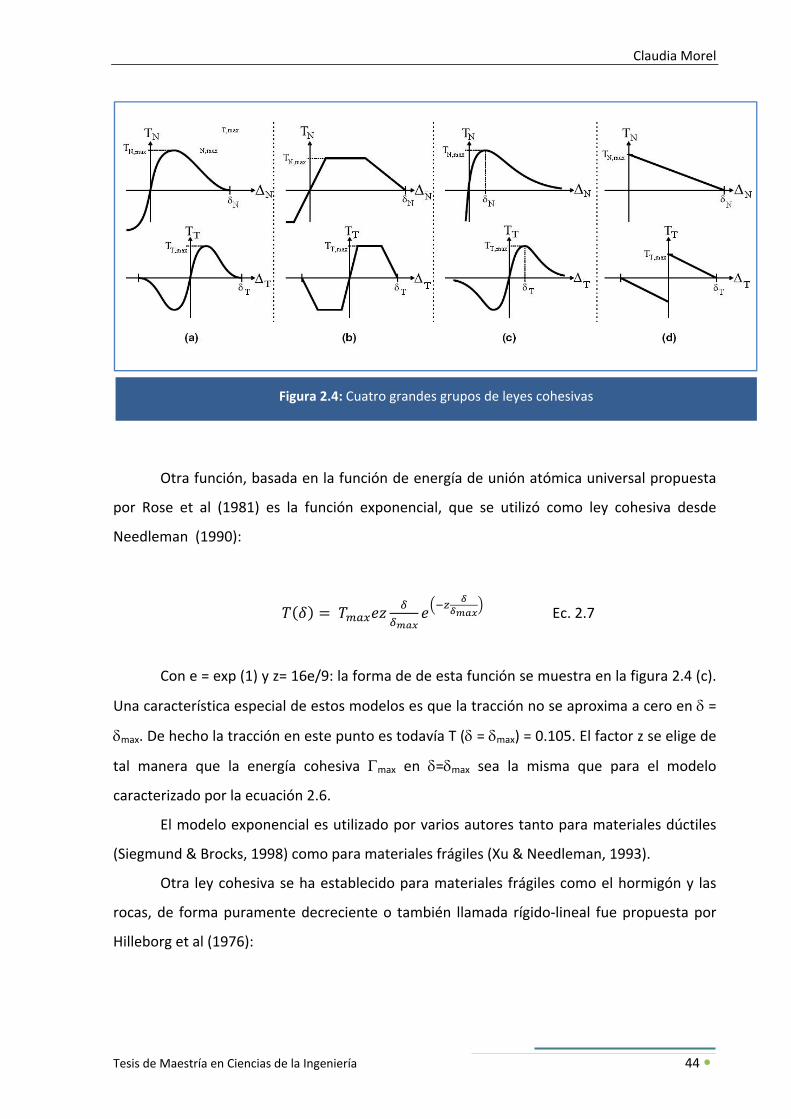
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 44
Otra función, basada en la función de energía de unión atómica universal propuesta
por Rose et al (1981) es la función exponencial, que se utilizó como ley cohesiva desde
Needleman (1990):
Ec. 2.7
Con e = exp (1) y z= 16e/9: la forma de de esta función se muestra en la figura 2.4 (c).
Una característica especial de estos modelos es que la tracción no se aproxima a cero en δ =
δmax. De hecho la tracción en este punto es todavía T (δ = δmax) = 0.105. El factor z se elige de
tal manera que la energía cohesiva Γmax en δ=δmax sea la misma que para el modelo
caracterizado por la ecuación 2.6.
El modelo exponencial es utilizado por varios autores tanto para materiales dúctiles
(Siegmund & Brocks, 1998) como para materiales frágiles (Xu & Needleman, 1993).
Otra ley cohesiva se ha establecido para materiales frágiles como el hormigón y las
rocas, de forma puramente decreciente o también llamada rígido‐lineal fue propuesta por
Hilleborg et al (1976):
Figura 2.4: Cuatro grandes grupos de leyes cohesivas

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 45
1 Ec. 2.8
Contrariamente a las ecuaciones 2.6 y 2.7 esta función también utilizada por
Camacho y Ortiz (1996) que se muestra en la figura 2.4 (d), comienza con una rigidez infinita
hasta la tensión máxima Tmax.
Existen muchas leyes de separación similares con rigidez inicial infinita como la que
se muestra en la figura 2.4 (d), por ejemplo con un tensión constante al principio de la
separación, Guinea et al (1994), con una descripción bilineal; o con una ley de
ablandamiento (softening) no lineal, Bažant ( 1993). La tracción normal no es una función de
la separación tangencial y la tracción tangencial no es controlada por la separación normal.
Esto implica que la interface solo puede fallar debido a la separación en la dirección normal.
Una ley cohesiva más versátil es propuesta por Schieder (2000), la cual satisface los
siguientes requerimientos
1. La rigidez inicial del elemento cohesivo puede ser variado
2. se puede definir una región, donde la tracción en el elemento cohesivo
se mantiene constante
3. La curva debe ser diferenciable por razones numéricas
Esto se logró mediante el uso de dos parámetros adicionales δ1 y δ2 , ver figuras 2.3 y
2.4 (b), llevando a una formulación de la función T (δ):
2 1
2 3 1
Ec. 2.9
Usando δ1 = δ2 =0.33 δmax la curva es muy similar a la ecuación 2.6 y la rama de
ablandamiento es de hecho idéntica. Esta ley es similar a la ley cohesiva multilineal
propuesta por Tvergaard & Hutchinson (1992), quienes también introdujeron dos
parámetros adicionales, ver figuras 2.3 y 2.4 (b), con el requerimiento de que la curva sea
diferenciable. La función para las tracciones está dada por

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 46
1
Ec. 2.10
Esta ley cohesiva también ha sido usada por ejemplo por Roy Chowdhury al (2000). et
Un caso especial de las ecuaciones 2.9 y 2.10 se obtiene para δ1 0, δ2 0, que da
una tensión constante desde el principio hasta el final de la falla del elemento, y es
usualmente llamada ley cohesiva rectangular, (Yuan & Cornec, 1991), (Lin, Kim, Cornec, &
Schwalbe, 1998).
Elices et al (2002), establecieron que la forma de la ley cohesiva depende de la clase
de materiales en consideración. Los autores afirman que la ley cohesiva no debería poseer
una rama de endurecimiento inicial ya que solo los elementos continuos y no los elementos
cohesivos se suponen afectados por el comportamiento global de la estructura.
En una etapa inicial todos los modelos están basados en un modo I puro bajo carga
monótona solamente. Se han hecho muchos progresos en el desarrollo para la aplicación a
carga combinada, dependencia en el tiempo, interacción de carga combinada normal y
tangencial.
2.3 Modelo Cohesivo para carga combinada.
Todos los modelos cohesivos pueden ser usados para separación normal, separación
tangencia y para cargas combinadas. Algunos modelos usan los tres parámetros (TN, max,
δNmax y un parámetro de interacción llamado α o q) otros usan dos pares de parámetros
independientes para la separación material tangencial y normal, TN, max, δNmax, TTmax, δTmax.
Al combinarse fractura normal y por corte el daño por corte reducirá la ductilidad en la
dirección normal y viceversa:
TN = fN (δN, δT), TT = fT (δN, δT) Ec. 2.11
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 47
La interacción de la separación normal y de corte puede ser descripta por una
variable de daño Da, que se define como:
⁄ Ec. 2.12
Con un parámetro adicional ρ, véase (Scheider, 2000). Los corchetes de Macauley se
usan para indicar que el efecto de δN de desvanece bajo compresión. Para ρ = 2 y δNmax =
δTmax = δmax, la variable de daño en la ecuación 2.12 es igual al valor normalizado absoluto de
la separación, y ∞ define una interacción de desvanecimiento entre las
separaciones.
Introduciendo Da, las funciones en la ecuación 2.11 puede ser escrita como:
TN = fN (δN, Da), TT = fT (δT, Da) Ec. 2.13
La ley cohesiva polinomial, ecuación 2.6, puede ser extendida para la separación
combinada de corte y normal (Tvergaard, 1990). Cuatro parámetros independientes de la
separación material y ρ =2 dan:
/ //
/1 Ec. 2.14
Un enfoque similar se usa para la ley cohesiva propuesta por Tvergaard y Hutchinson
(1993) , que es una extensión de la ecuación 2.10 usando la definición de daño de la
ecuación 2.12 con ρ = 2 y tres parámetros TN, max, δNmax, y Tmax mas dos parámetros de
forma Da1 y Da2, describiendo la forma de la ley cohesiva. Las tracciones se calculan por:

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 48
1
1 Ec. 2.15
Que puede descomponerse en una parte tangencial y otra normal:
, Ec. 2.16
La extensión de la ley cohesiva exponencial para separación combinada corte y
normal usa una formulación modificada en la cual δmax es la separación para la tracción
máxima normal TN (δmax) = Tmax:
TN T exp N N exp T 1 q 1 exp T N
TT 2T eq T 1 N exp N exp T
Ec. 2.17
Ver (Xu & Needleman, 1993) . La ley cohesiva exponencial tiene solo tres parámetros
TN, δN, y q (0 1 . Para q =1, las energías de separación para modo normal puro y
tangencial puro son iguales, q = 0.4289 da la misma tensión máxima para ambos modos de
fractura. La máxima tracción tangencial bajo corte puro (δN = 0), TTmax, se alcanza para
/√2 , independiente de q.
EL valor de TTmax en si mismo depende de q. Es TTmax = 2.33 Tmax.q
Otra separación acoplada normal y tangencial es presentada por Camacho & Ortiz
(1996) a través de valores efectivos de separación y tracción, en la cual se da distinto peso a
los componentes de separación mediante un factor β:
Ec. 2.18

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 49
La tracción efectiva es definida de manera similar. Con estos valores efectivos y
, todas las leyes cohesivas presentadas en esta sección pueden ser aplicadas para cargas
mixtas llevando a una formulación con tres parámetros Tmax, δmax y β.
El modelo cohesivo puede ser visto como una herramienta flexible, versátil y robusta
para simulaciones computacionales de localización de daño, separación material hasta la
falla estructural. Dado su carácter fenomenológico, el modelo se ajusta a diferentes tipos de
materiales y fenómenos de falla. Puede ser aplicado al análisis de estructuras ingenieriles
macroscópicas así como a microestructuras heterogéneas (Brocks, Cornec, & Scheider,
2003).
Sus ventajas son:
• La relación cohesiva puede ser vista como una ley material, y los parámetros
respectivos caracterizan las propiedades materiales respecto al daño y fractura
independientemente de la geometría.
• En principio no existen problemas para transferir los parámetros de fractura de
especímenes pequeños a componentes mayores como sucede con el enfoque clásico de la
Mecánica de Fractura macroscópica.
• Al confiar la enucleación, propagación, ramificación y otros aspectos del
comportamiento de la fractura de los materiales a una ley cohesiva maestra, la cantidad de
fenomenología es considerablemente menor comparada con otras teorías de distribución de
daño.
• Se puede simular el proceso de separación, daño y fractura a diferentes escalas de
longitud.
• Los modelos cohesivos dotan a los materiales con una longitud característica, a
diferencia de las teorías de daño, la ley cohesiva presenta una energía de fractura definida,
lo cual elimina la dependencia del mallado utilizado, de tal manera que las soluciones por
elementos finitos alcanzan una convergencia apropiada en el límite del desvanecimiento del
tamaño de la malla.
Entre sus desventajas se puede mencionar:
• En una ley cohesiva tanto σmax como G es difícil de hacer dependiente del estado
triaxial de tensiones en la punta de la fisura.
• Otra desventaja es que el camino de la fisura debe ser predefinido.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 50
Capítulo 3 Implementación

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 51
Capítulo 3 Implementación
3.1 Introducción
Para efectuar las simulaciones numéricas de los ensayos, se ha utilizado un programa
codificado en lenguaje FORTRAN, denominado “Pulloutr”. Modificado por Ricardo Barrios
D'Ambra y Hector Cóceres, su objeto es calcular tensiones, deformaciones y energía
disipada, de una pieza tridimensional consistente en una matriz prismática que contiene una
fibra del mismo u otro material, sometida a un ensayo de extracción de fibra por tracción o
compresión o en inglés pullout y pushout respectivamente.
Fue el objetivo de esta Tesis complementar este programa adicionando una ley
cohesiva de interface fibra /matriz.
La implementación de estos conceptos al programa se efectuó agregando a la
codificación una subrutina que calculara estas tensiones y las pusiera de manifiesto en el
output del programa. La subrutina se acopló a la rutina principal de cálculo de solicitaciones
en las barras que unen fibra con matriz.
En primera instancia se codificó una ley cohesiva desacoplada, i.e., esfuerzo de corte
desacoplado del esfuerzo normal. Luego se codificó una ley cohesiva acoplada para el cálculo
de estos dos esfuerzos, tomando como referencia las ecuaciones propuestas por Högberg
(2006) y Lin et al (2001).
Elementos Discretos DEM 3.2 Método de los
3.2.1 Antecedentes
El término método de los elementos discretos (sus siglas MED, en inglés discrete
element method, DEM ) es una familia de métodos numéricos para calcular el movimiento
de un gran número de partículas como moléculas o granos de arena. El método fue
originalmente utilizado por Peter Cundall en 1971, a problemas de mecánica de rocas. La
base teórica del método fue detallado por Williams, Hocking y Mustoe en 1985 quienes
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 52
demostraron que el MED podía ser visto como un método de los elementos finitos
generalizado. Sus aplicaciones a problemas geomecánicos es descrita en el libro Numerical
Modeling in Rock Mechanics, de Pande, G., Beer, G. y Williams, J.R (1990) Las ramas de la
familia del MED son el distinct element method de Cundall en 1971, el Método generalizado
de los elementos discretos propuesto por Hocking, Williams y Mustoe en 1985, el análisis de
deformación discontinuo (DDA) propuesto por Shi en 1988 y el Método de los elementos
finitos‐discreto propuesto por Munjiza y Owen en 2004.
Las características de la formulación del Método de los Elementos Discretos (DEM)
utilizada en el presente trabajo fueron presentadas y propuestas originalmente por Nayfeh y
Hefzy (1978). En la misma se sustituía una estructura reticulada espacial por un continuo
equivalente, para reducir el número de grados de libertad y a su vez el esfuerzo
computacional.
El modelo de discretización a emplear fue desarrollado por Hayashi (1982) y
verificado también por Rocha (1989) e Iturrioz (1995). Como referencia de trabajos en Brasil
y Argentina se pueden citar los realizados por Riera (1980), (1984), impacto en hormigón
armado, procesos de fractura en hormigón y hormigón armado (Riera & Iturrioz, 1998),
simulación del comportamiento de suelos frente a cargas explosivas (Iturrioz & Riera, 2001),
problemas de impacto en materiales compuestos poliméricos y fenómenos de fractura por
impacto en polímeros (Barrios D'Ambra, Iturrioz, Fasce, Frontini, & P., 2002) (Barrios
D'Ambra, Iturrioz, Fasce, Frontini, & A.P., 2003), determinación de parámetros
fractomecánicos (Tech, Batista, Iturrioz, & Cisilino, 2003), aplicaciones en Mecánica de
Fractura estática y dinámica (Kosteski, Barrios D'Ambra, Iturrioz, Fasce, Frontini, & Cisilino,
2004), (Kosteski, Cóceres, Barrios D'Ambra, Iturrioz, & Cisilino, 2006) , (Barrios D'Ambra,
Iturrioz, Cóceres, & Kosteski, 2006).
3.2.2 Formulación del método
El MED consiste esencialmente en la discretización espacial del continuo por medio
de un reticulado espacial formado por la repetición del módulo regular. Las rigideces de las
barras que componen el reticulado son equivalentes al del continuo que se quiere
representar. Como se consideran barras de reticulado espacial, por cada nudo se tienen tres

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 53
grados de libertad. La masa del modelo es discretizada y concentrada en los nodos de
reticulado espacial mencionado.
La figura 3.1 muestra el arreglo cúbico básico o módulo. Este módulo está compuesto
de ocho nodos en sus vértices más un nodo central.
Figura 3.1 : a) Detalle del módulo cúbico básico. b) Prisma
comp
3.2.3 Rigidez de las Barras
uesto por varios módulos cúbicos.
El arreglo cúbico es equivalente a un sólido elástico ortótropo dentro del campo de la
elasticidad lineal, según fue verificado por Hayashi (1982). Sólo se establece una restricción
al valor del módulo de Poisson, ν que debe ser igual a 0,25 para que la equivalencia entre
ambos sea la deseada, es decir que el material se comporte como isótropo. Para otros
valores de ν se producen pequeñas diferencias en los términos de corte, que pueden
despreciarse cuando se está estudiando la respuesta no lineal del modelo.
Las constantes elásticas de un sólido y las rigideces equivalentes de las barras para el
módulo cúbico básico presentado en la Figura 3.1 se basan en primera instancia en la
relación constitutiva de un cuerpo elástico arbitrario. Utilizando notación indicial:
σi =Cij. εj (i,j =1 … 6) Ec. 3.1
Un cuerpo anisótropo y elástico posee una matriz de constantes elásticas, Cij, definida
por 21 parámetros independientes. Si el material es isótropo, es posible expresar la matriz Cij
en función de dos constantes independientes, con lo cual quedaría expresada de la siguiente
manera:

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 54
0 0 00 0 00 0 0
0 0 0 0 00 0 0 0 00 0 0 0 0
Ec. 3.2
Donde C11, C12, C44 son funciones del módulo de elasticidad longitudinal E y del
coeficiente de Poisson ν.
Dado que se están analizando estructuras reticuladas a partir de elementos
unidireccionales, es de esperar que cada elemento contribuya a la rigidez global de la
estructura, y que la suma de las contribuciones medias de cada barra forme la matriz final.
Se define Q11 como una propiedad unidireccional efectiva, que es el valor medio
ponderado con relación al área de influencia de la barra en un determinado conjunto de
barras paralelas, siendo su valor función de la separación entre las mismas.
El elemento cúbico de la figura 3.1 posee dos valores para Q11, uno que corresponde
a las columnas que son normales a las caras del cubo, y otro correspondiente a las barras
diagonales. Estas propiedades serán diferenciadas respectivamente por Qn11 y Q
d11.
Para una estructura cúbica el valor del parámetro Qn11 puede ser fácilmente
determinado proyectando el área de las barras en una cara del cubo. Entonces en cada cara
del módulo cúbico de área Le2 se tiene una contribución de dos barras normales enteras. De
esta forma, cada elemento tiene un área efectiva de contribución igual a (Le2/2). Por eso, la
relación entre la rigidez de la barra EAn y el área efectiva de contribución de la misma
provee el valor medio de una propiedad unidireccional efectiva en la dirección de las barras
normales a las caras del módulo, Qn11:
Q11n =
E.An
Le2 2⁄ Ec. 3.3
En forma similar se procede para obtener el valor medio de la propiedad
unidireccional en la dirección de las barras diagonales en relación a las caras del módulo
cúbico, Qd11. Se debe también, determinar el área efectiva de contribución de cada diagonal.
Luego, Qd11 está dado por la expresión:

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 55
Q11d = √
. . Ec. 3.4
Las constantes elásticas E, ν y λ pueden ser obtenidas para el modelo empleado en
este trabajo, a partir de los correspondientes Cij de la expresión anterior, de las que se
obtiene:
2.
Ec. 3.5
12
Como lo que interesa es obtener las rigideces de las barras (E An) y (E Ad) en función
de las propiedades elásticas del sólido que representa, E, ν, efectuando los reemplazos
convenientes obtenemos:
..
. . .. .
. Ec. 3.6
. . . .√
Estas expresiones son válidas si el módulo o arreglo básico de barras es cúbico. Para
una célula básica de forma diferente, se deben obtener nuevas relaciones. Bush et al. (1977)
y Noor y Mikulas (1988) citados por Hayashi (1982) e Iturrioz (1995) presentan estas
relaciones para tetraedros, en cuanto otros autores proponen realizar el cálculo de las
rigideces de las barras directamente por calibración numérica. Schlangen (1993) realizó una
revisión bibliográfica de varios tipos de arreglos utilizados en el modelado de estructuras de
hormigón.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 56
Ostoja_Starzenski (1995) también presenta el cálculo de propiedades equivalentes de
células tetraédricas. barras para el caso en que existe ortotropía utilizando
3.2.4 Solución de la ecuación de equilibrio
Como se vio en las secciones anteriores, el medio continuo fue representado por
medio de un sistema discreto tridimensional de n grados de libertad. El problema consiste
ahora en obtener la respuesta para un estado de cargas arbitrario. La ecuación del
movimiento del sistema está dada por la expresión:
. . 0 Ec. 3.7
Donde x representa el vector de desplazamientos nodales, M la matriz de masa nodal
(diagonal), C es una matriz de amortiguamiento, también considerada diagonal, y
representa la diferencia entre el vector de fuerzas internas y el vector de fuerzas
externa . Se considera que estas fuerzas actúan sobre los nudos del modelo.
Para cada nodo i del modelo se verifica que:
∑ Ec. 3.8
Siendo k el número de barras que concurren al nudo i. La fuerza interna en cada
barra, , es obtenida a partir de una ecuación constitutiva elemental, que se puede
expresar como sigue:
, Ec. 3.9
εb y ε’b representan la deformación y la velocidad de deformación de la barra b, y ,
será una función que dependerá del tipo de material a modelar (relación constitutiva).
Para a la matriz de amortiguamiento C, se adoptó la hipótesis simplificativa de
considerar el amortiguamiento proporcional a la masa M.
C = M . Df Ec. 3.10

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 57
Siendo Df una constante vinculada al coeficiente de amortiguamiento crítico ξn.
Df = ξn.2.π.fn Ec. 3.11
Donde fn es la frecuencia natural de vibración de modo n (Hz). En general, el modo n
se adopta igual al modo fundamental de vibración de la estructura (Iturrioz, 1995).
Para la integración en el tiempo de la ecuación de equilibrio 3‐7, se utiliza un
esquema de integración explícita, en el que los desplazamientos y sus derivadas son
expresados en términos de los valores obtenidos en pasos anteriores. Se utiliza el método de
diferencias finitas centrales, con el objeto de obtener la respuesta más detallada posible, y
porque presenta la ventaja de no necesitar el ensamblado de la matriz de rigidez global,
además de la facilidad de su implementación computacional para problemas con no
linealidad física y geométrica.
3.2.5 Relación constitutiva del elemento De acuerdo con los principios de la MFLE, cuando el factor crítico de intensidad de
tensiones es alcanzado en el algún punto del material (en las proximidades de algún defecto
inherente a su constitución) ocurre la propagación inestable de una fisura, causando la
rotura del mismo. Durante el proceso de propagación, se consume una cierta cantidad de
energía, que es función del área de la fractura formada. Este consumo debe estar
representado por una relación constitutiva que describa el comportamiento del material en
la fase posterior a la fractura.
Si se tiene en cuenta que el material en estudio tiene comportamiento frágil, puede
aplicarse la mecánica lineal de fractura. El factor de intensidad de tensiones para el modo de
falla I (KI), puede ser escrito como:
KI = χ. ft . √ Ec. 3.12
donde χ es un parámetro que depende de la geometría del problema, y ft es una
tensión de control crítica.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 58
Considerando el comportamiento lineal hasta la rotura (ft = εp . E) y estado plano de
deformaciones, la deformación crítica estará dada por:
Ec. 3.13
donde:
Ec. 3.14
Rfc es un "factor de falla" definido como:
Ec. 3.15
La relación entre εp y Gf fue establecida como criterio de falla a tracción y su
deducción está basada en la Mecánica de Fractura lineal elástica (Rocha, 1989).
A partir de estos conceptos, la relación constitutiva que utiliza el Método de los
Elementos Discretos, es la implementada por Rocha (1989), quien propuso una ley
constitutiva bilineal para los elementos de barra del modelo, lo que permite describir el
comportamiento de los materiales hasta la rotura. Esta relación se representa en la figura
3.2.
Figura 3.2: Relación Constitutiva Elemental de las barras del reticulado ‐ a) Diagrama
constitutivo adoptado con sus parámetros de control; b) Esquema para la carga y descarga.
(Rocha, 1989).
En la figura 3.2, los símbolos utilizados significan lo siguiente:
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 59
F: fuerza axial resultante de la barra, función de la deformación ε, y Pcr es el valor de
la carga crítica asociada a la εp.
• εp: deformación crítica de rotura. Es la deformación a partir de la cual
una microfisura se inestabiliza y se propaga.
• EA: rigidez axial de las barras normales y diagonales del modelo
reticulado, obtenidas a partir de las constantes del material.
• kr: ductilidad, parámetro que permite calcular la deformación para la
cual la barra deja de transmitir esfuerzos de tracción.
• Le: longitud de las barras normales.
• Af: área de influencia de la barra. Es decir, el área transversal formada
con su rotura. Se puede calcular como: Af=cte.Le2, donde cte es un coeficiente
propio del modelo cúbico.
• Gf: energía específica de fractura. Es la energía consumida por unidad
de área de fractura formada.
Es importante destacar que Pcr, εp, E, Gf, y Rf son propiedades exclusivas del material;
Af y Le son propiedades exclusivas del modelo; y EA y kr dependen tanto del modelo como del
material.
Además, el modelo presenta una limitación en la definición de Le, que es la siguiente:
Cuando un elemento rompe, toda la energía de deformación acumulada en él se
consume en el proceso de fractura. Esto no es lo que sucede en realidad, pues parte de la
energía de deformación se preserva bajo la forma de energía cinética (vibraciones inducidas)
y energía elástica, en las dos partes en las que el elemento se divide. Como no es posible
tener en cuenta esta subdivisión para un elemento aislado (porque las masas están
concentradas en los nudos, y no a lo largo de su longitud), esto resulta en una restricción al
valor máximo para la longitud Le.
Claudia Morel
3.2.6 Integración por diferencias finitas
La solución de la ecuación del movimiento (Ecuación 3.7), se realiza por medio de un
método explícito, con integración numérica por diferencia finitas centrales. Esto permite
realizar un balance energético durante todo el proceso, y constituye una información de
gran utilidad para comprender los fenómenos estudiados.
La integración explícita no requiere del montaje de la matriz de rigidez global del
sistema. Esto es especialmente conveniente para el análisis dinámico no lineal, en donde en
cada paso de integración en el tiempo la matriz de rigidez debe ser modificada (Riera, 1980).
Una característica inherente al esquema explícito de integración es la de permitir integrar
aun sistemas hipostáticos, ya que la rigidez solo entra en la construcción del vector de cargas
independiente en cada paso de tiempo. Esto facilita el estudio de estructuras que no estén
totalmente vinculadas, como por ejemplo, seguir la trayectoria de los fragmentos en que se
rompe una estructura.
Debido a la utilización de un método de integración explícita en la integración de las
ecuaciones de movimiento, el intervalo de tiempo Δt se ve restringido, por condiciones de
estabilidad numérica, a un valor crítico Δtcrítico. El método de las diferencias finitas centrales
presenta el menor intervalo crítico en comparación con los otros métodos explícitos. Para
este modelo se ha adoptado un Δtcrítico en función de la longitud de las barras (Le) y de la
velocidad de propagación de la onda de compresión Vp:
Δ í 0,6. Ec. 3.16
Donde Vp es la velocidad de las ondas principales o de compresión “P”.
El proceso de integración básicamente consiste en:
• Dada una configuración deformada en el instante j
• Se obtienen las fuerzas internas, en esta configuración, en el instante j.
• Conocidas las otras fuerzas actuantes en el instante j
• Se determina la configuración deformada en el instante j+1.
Tesis de Maestría en Ciencias de la Ingeniería 60

Claudia Morel
3.3 Modelado de la Ley Cohesiva 3.3.1 Ley Cohesiva Desacoplada
Para el modelado de la ley cohesiva desacoplada se han utilizado las siguientes
formas para la ley cohesiva, véase figuras 3.3 y 3.4.
Tesis de Maestría en Ciencias de la Ingeniería 61
Figura 3.3: Ley cohesiva desacoplada. Fuerza de
corte TT versus separación por corte ΔT para ΔN= 0.
Un diagrama multilineal entre carga vs. desplazamiento, establece las relaciones
entre las tracciones y deformaciones de la interface. Los esfuerzos y las separaciones no se
hallan normalizados respecto de los valores críticos. No se establece relación entre los
esfuerzos normal y tangencial. Estos trabajan de manera independiente entre sí.
Figura 3.4: Fuerza Normal TN versus
separación por apertura ΔN para ΔT= 0.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 62
Las ecuaciones que establecen las relaciones entre fuerza y desplazamiento surgen
directamente de la forma de la gráfica de la ley cohesiva, a través de simples relaciones
trigonométricas.
3.3.2 Ley Cohesiva Acoplada
El modelo de zona cohesiva consiste en una relación constitutiva entre las tracciones
T actuantes en la interface y la correspondiente separación interfacial Δ (salto en el
desplazamiento entre las caras de la interface). Lin et al (2001) usaron un modelo de falla
cohesivo intrínseco en el cual a medida que la interface se separa, la magnitud de T se
incrementa, alcanza un valor máximo y luego decae progresivamente a cero mientras ocurre
la separación completa. Lin (2001) modificó en su estudio el modelo de falla cohesivo
bilineal de Geubelle y Baylor (1998) para tener en cuenta el contacto friccional entre las
superficies de fractura creadas. Se hace la suposición de que el deslizamiento friccional
obedece la ley friccional de Coulomb (con un coeficiente de fricción μ), produciendo una
relación entre las tracciones cohesivas o interfaciales normales (TN) y tangenciales (TT,
también llamada tracción de corte) y los saltos de desplazamientos o separaciones normal
(ΔN) y tangencial (ΔT):
Para δN > 0
11
Ec. 3.17
∆∆
11
∆∆
Ec. 3.18
Para δN = 0
∆∆
11
∆∆
∆ | | | |
Ec. 3.19

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 63
En el último caso, la tracción normal de un lado al otro de la interface es calculada
por un algoritmo de contacto para hacer cumplir la condición δN = 0.
En las ecuaciones 3.17 a 3.19, δN, δT y δ denotan los incrementos adimensionales
totales en el desplazamiento normal, tangencial y total respectivamente, definido por:
∆∆,
∆∆
, Ec. 3.20
Donde ΔC
N y ΔCT son las separaciones críticas normal y tangencial para las cuales se
supone la separación completa.
La variación de las componentes de tracción normal y tangencial respecto a ΔN y ΔT
que corresponden a abertura pura (ΔT = 0) y separación por corte puro (ΔN=0) se muestran
en las figuras 3.5 a y b. El máximo valor de TN es σmax y ocurre cuando ΔN = δmax. ΔCN. EL
máximo valor de |TT| es τmax dado por
∆ ∆⁄ Ec. 3.21
Y se logra a |∆T|= δmax. ΔCT.
El proceso de falla observado en el ensayo de pushout es casi exclusivamente de
corte e implica una contribución casi insignificante del modo de apertura (normal).
Como se puede ver de las ecuaciones 3.17 a 3.19 la respuesta en cada punto a lo
largo de la interface es caracterizada por cuatro parámetros: δmax, σmax, ΔCN y ΔC
T. El número
de parámetros puede ser reducido a tres ya que los resultados son prácticamente
insensibles a δmax mientras la rigidez de los elementos de la interface sea mayor que la de los
elementos rodean al volumen.
En resumen, la interface es discretizada en una serie de elementos interfaciales,
referidos como elementos cohesivos. Previamente al despegado interfacial, las ecuaciones
3.17 a 3.19 se usan para describir la evolución de las tracciones normal y tangencial
actuante a lo largo de los elementos de la interface par a los cuales ΔN > 0 y la evolución de
las componentes de tracción tangencial donde los elementos cohesivos superficiales están
en contacto (ΔN = 0).

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 64
Para prevenir la interpenetración de elementos pertenecientes a la matriz y los
correspondientes a la fibra, se utilizó una ley de contacto fibra‐matriz.
A efectos comparativos se usaron los lineamientos dados por Högberg (2006) como
modelo para el cálculo de las tensiones en la interface. Este modelo se tomó como base de
estudio para posteriores trabajos de investigación, en los cuales el ensayo de la medición de
la fuerza cohesiva entre dos materiales tenga una geometría que produzca
preponderantemente esfuerzos del tipo normal y en menor medida esfuerzos de corte. Tal
es el caso del modelo de ensayo descripto en la Norma ASTM D 3807‐98 (94) (2004), en el
cual se prescribe el método para ensayar las propiedades de resistencia de adhesivos bajo
cargas de tracción.
La deformación normal se normaliza con la separación crítica normal δN y la
deformación tangencial con la separación crítica tangencial δT, al igual que en la ecuación
3.20.
Las tracciones se normalizan con la resistencia en sus respectivos modos, del mismo
modo que en el modelo anterior:
, Ec. 3.22
Figura 3.5: Ley cohesiva. (a) Tracción Normal TN como función de la separación normal δN para δT=
0; (b) Tracción de corte TT versus separación por corte δT para δN= 0. Las curvas continuas y de puntos corresponden a falla por corte cohesivo para contacto friccional y no friccional
respectivamente.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 65
Todas las deformaciones y tensiones adimensionales varían en el rango de 0 a 1. Se
define un parámetro llamado θ, combinación de modos (mode mixity) que es la razón de las
deformaciones adimensionales normal y tangencial:
tan Ec. 3.23
El modo I puro es equivalente a θ = π/2, y el modo II puro corresponde a θ = 0. Las
deformaciones en modo I y modo II se acoplan mediante una medida de deformación
adimensional δ, igual al ya definido en la ecuación 3.20. El comportamiento de
ablandamiento (softening) de la capa adhesiva comienza cuando δ = δp, el cual está dado
por:
Ec. 3.24
Donde ∆ ∆⁄ y ∆ ∆⁄ son las separaciones normalizadas de
ablandamiento en modo I y II, respectivamente.
Para cada combinación de modos, θ, en el rango de 0 a π/2, existe una tracción, S, en
relación a la medida de deformación, δ, definida por:
,
0
1
0 1
Ec. 3.25

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 66
Capítulo 4 Análisis y Verificación
4.1 Simulación numérica del ensayo Pullout
Este estudio comienza teniendo como plataforma la codificación del programa
“Pulloutr”, ya explicado en el capítulo anterior. Este programa se utiliza para obtener
información sobre desplazamientos y tensiones de una pieza tridimensional que contenga
una sola fibra del mismo u otro material que el de la matriz, sometida a un ensayo de pullout
o pushout. En la interface fibra matriz, se colocó un modelo de ley cohesiva o interfacial. Las
dimensiones características se muestran en la figura 4.1, donde
M = cantidad de nudos en la dirección X
L = cantidad de nudos en la dirección Z
N = cantidad de nudos en la dirección Y (Altura del prisma)
Mini, Mfin (nudo de inicio y fin de la fibra en dirección X)
Lini, Lfin (nudo de inicio y fin de la fibra en dirección Z)
Nini, Nfin (nudo de inicio y fin de la fibra en dirección Y) (long. de la fibra)
Nfin puede ser mayor que N para que la fibra sobresalga respecto de la matriz
Nini puede ser =1 en ese caso la fibra llega hasta el borde inferior de la matriz
RS= radio límite del apoyo de la matriz
Δp= desplazamiento prescripto aplicado a la fibra en un tiempo t
P= fuerza resultante de la aplicación de Δp
Em= Módulo de elasticidad de la matriz
Ef= Módulo de elasticidad de la fibra

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 67
Se han tomado como parámetro de comparación los ensayos efectuados por Lin et al
(2001) mediante MEF (método de elementos finitos) y se han adoptado dimensiones
similares a las adoptadas por el mencionado investigador, tratando que el perímetro de
ambas superficies de contacto lateral sean similares. El modelo utilizado por Lin es cilíndrico
y el análisis numérico es bidimensional, bajo condiciones de simetría radial. El modelo
utilizado en el presente trabajo es tridimensional y prismático. Dado que la comparación
entre los dos trabajos se realiza utilizando parámetros no geométricos esta diferencia puede
ser desconsiderada. Además, al ser la ley cohesiva un modelo fenomenológico que utiliza
como variable preponderante los desplazamientos, se pretende estudiar hasta que punto
ejerce su influencia esta diferencia.
Se adoptaron para la fibra y la matriz las siguientes propiedades: Ef =2500 N/mm2;
Em =4000 N/mm2, con un coeficiente de Poisson de 0,25 para ambos materiales y un
coeficiente de fricción de 0,52. La fibra está compuesta por material poliéster y la matriz por
un material epoxy, para más características de los materiales, ver la bibliografía citada,
(Bechel & Sottos, 1998b).
La simulación reproduce y analiza un prisma tridimensional. La fibra posee igual
longitud que la matriz que lo contiene (N), y se aplica sobre ella un desplazamiento
prescripto Δp. Este desplazamiento se aplica sobre el extremo superior de la misma en el
sentido positivo del eje “Y”, para obtener un ensayo de pullout. La malla está compuesta por
8372 nodos en total, para una malla cuya longitud de modulo cúbico es igual a 0,5 mm. La
superficie de contacto Fibra‐Matriz posee 192 nodos.
Matriz
Fibra
N
x
M
Mini-MfinP
y
RS
Δ P
LC
E m
Ef
x
z
L
M
Mini-Mfin
Lini-Lfin
RS
Matriz Fibra
E m
Ef
Figura 4.1: Esquema del modelo para ensayo pullout y pushout

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 68
En cuanto a los parámetros de resistencia para la ley cohesiva, se adoptó una
separación crítica y ΔCT = ΔC
N = 0,01 mm, tanto para la dirección normal como la tangencial.
La resistencia cohesiva se tomo igual a σmax= τmax = 11 MPa para esfuerzo de tracción en la
fibra. Al elegir valores idénticos para estas variables, se reduce el número de incógnitas del
problema, y como ya se ha mencionado antes, estos valores se adoptan con igual criterio
elegido por (Lin, Geubelle, & Sottos, 2001) a efectos comparativos.
Las dimensiones en los ejes “X”, “Y” y “Z”, se denominan M, N y L respectivamente.
Los nodos iniciales y finales de la fibra se denominan Mini y Mfin en el sentido “X” y Lini y
Lfin en el sentido “Z”. M = L = 9mm; N =5.5mm, RS =1.6 mm; Lado de la Fibra=2 mm.
En la figura 4.2, se muestra la malla deformada, esta gráfica se ha efectuado
utilizando el software ANSYS como post‐procesador.
4.1.1 Modelo de Ley Cohesiva con Carga Combinada Desacoplada
Como ya se ha mencionado en el capítulo 2, para analizar procesos de fractura de
modo combinado (i.e.: se tienen en cuenta tanto esfuerzos tangenciales como normales a la
superficie) se pueden utilizar dos aproximaciones:
1
X
Y
Z
time= 9.999999999997715E-004
SEP 11 200911:32:24
ELEMENTS
UF
Figura 4.2: Malla deformada

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 69
(a) mediante una ley cohesiva acoplada, o
(b) una ley cohesiva desacoplada.
La tracción normal de una ley cohesiva desacoplada es independiente de la
separación tangencial y la tracción tangencial es independiente de la separación normal. Las
leyes cohesivas desacopladas se utilizan cuando el proceso de despegado ocurre bajo un
modo‐normal (modo I) o tangencial (modo II) – o cuando uno de ellos es predominante
sobre el otro. En el ensayo de pullout, el esfuerzo de corte es predominante respecto del
esfuerzo normal.
En la figura 4.3 se puede observar la relación fuerza P sobre el cabezal de la fibra /
desplazamiento de la fibra.
Los resultados muestran, tal como lo describe la bibliografía citada (Bechel & Sottos,
1998b), (Lin, Geubelle, & Sottos, 2001), una primer parte lineal, un pico de tensión máxima,
al que le sigue una parte no lineal y finalmente un descenso brusco al que prosigue el
esfuerzo friccional. Se decidió denominar al modelo de ley cohesiva con carga combinada
desacoplada como Modelo 3, tanto para el ensayo de pullout como de pushout, para
diferenciarlo de los modelos de ley cohesiva acoplados, y de los resultados con los cuales se
compara.
En las figuras 4.3 y 4.4, se comparan los resultados utilizando el Modelo 3 con los
obtenidos por Lin et al mediante simulación por MEF.
La gráfica carga‐desplazamiento, figura 4.3, muestra que las cargas obtenidas con el
Modelo 3, son superiores a las obtenidas por Lin et al, excepto en la fase III de la curva. La
fase II de la curva (ver capitulo 1, de esta tesis) correspondiente al comportamiento no
lineal posee un desarrollo similar al de Lin et al, extendiéndose hasta una separación de
aproximadamente 0,6 mm. La fase III de la curva, correspondiente a la parte friccional,
posee una carga inferior a la obtenida por Lin et al.
La gráfica longitud despegada/desplazamiento, figura 4.4, muestra valores similares
entre el Modelo 3 y los resultados de Lin et al, para los 1,5 y 4 mm de longitud despegada. El
Modelo 3 inicia el despegado en un valor de desplazamiento superior al de Lin et al y
también levemente superior a partir de los 4 mm de longitud despegada.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 70
Figura 4.3: Comparación de resultados para ley cohesiva desacoplada para ensayo de pullout,
carga vs. Desplazamiento con los ensayos obtenidos por Lin et al mediante MEF
Figura 4.4: Comparación de resultados para ley cohesiva desacoplada para ensayo de pullout, longitud despegada vs. Desplazamiento de la fibra, con los ensayos obtenidos por Lin et al
mediante MEF

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 71
4.1.2. Modelo de Ley Cohesiva con Carga Mixta Acoplada
En una primera instancia se tomó como modelo base para la codificación de la ley
cohesiva, las ecuaciones propuestas por Lin et al, al cual se denominará a partir de este
momento como Modelo 1. En este modelo se simplifican varias incógnitas del problema al
tomarse iguales los parámetros de tensión máxima para el esfuerzo normal y el esfuerzo de
corte y las separaciones máximas en la dirección normal y en la dirección tangencial.
Luego, se planteó la necesidad de contar con un modelo de ley cohesiva que
permitiera que los parámetros característicos del material pudieran ser distintos, para poder
aplicarlo a una variedad de ensayos de medición de la fuerza cohesiva. De esta manera, se
tomo como alternativa el modelo propuesto por Högberg, al cual se denominará como
Modelo 2.
Finalmente, habiendo adaptado ambos modelos a los requerimientos del MED, se
obtuvieron los siguientes resultados, que en las figuras 4.5 y 4.6 se comparan con los
obtenidos por Lin et al mediante simulación por MEF y con resultados experimentales
obtenidos por Bechel & Sottos (1998b).
Se observa en la gráfica carga‐desplazamiento, figura 4.5, que los resultados
obtenidos con el Modelo 2 arrojan valores mayores de tensión máxima que el Modelo 1 y
que los resultados obtenidos por Lin et al en su simulación por MEF. La fase II de la curva del
Modelo 2 es similar en extensión que la correspondiente a la curva obtenida por Lin et al. En
la curva correspondiente al Modelo 1, esta parte posee menor desarrollo llegando hasta un
valor de aproximadamente 0,5 mm. En cuanto a la parte friccional, o fase II de la curva, los
Modelos 1 y 2 poseen valores de carga casi idénticos pero menores a los obtenidos por Lin et
al.
En la figura 4.6, se puede observar que la curva correspondiente al Modelo 2 se
aproxima más a los valores de separación de despegado obtenidos por Lin et al, que el
Modelo 1. Los Modelos 1 y 2 tienen una longitud despegada crítica cercana a los 4 mm, un
poco superior a los 3.7 mm indicados por Lin et al.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 72
Figura 4.5: Diagrama carga‐desplazamiento para los modelos de ley Cohesiva 1 y 2
comparados con los resultados obtenidos por Lin et al para un ensayo de pullout.
Figura 4.6: Diagrama longitud despegada‐desplazamiento para los modelos de ley Cohesiva 1
y 2 comparados con los resultados obtenidos por Lin et al para un ensayo de pullout.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 73
4 .1.3 Estudio paramétrico de los ensayos de Pullout.
Habiendo comparado los resultados obtenidos, de los Modelos de Leyes Cohesivas 1
y 2, se decidió adoptar como modelo para efectuar un estudio paramétrico el Modelo 2.
Muchos parámetros son los que intervienen en el comportamiento de la separación
interface fibra‐matriz. El análisis dimensional identifica varios grupos adimensionales (Lin,
Geubelle, & Sottos, 2001). Entre ellos se optó por estudiar algunos parámetros no
geométricos, para facilitar la comparación entre los resultados.
En una primera fase se eligió el coeficiente de fricción (μ), luego la resistencia
interfacial (σmax) y por último la relación de módulos de elasticidad de fibra y matriz (Ef/Em).
A menos que se especifique de otra manera, los otros parámetros usados en los modelos
son los mismos.
4.1.3.1 Coeficiente de Fricción μ
Uno de los parámetros que afectan el comportamiento de la falla de la interface
fibra‐matriz es el coeficiente de fricción. En la figura 4.7 se muestra la curva carga‐
desplazamiento para tres valores distintos de coeficiente de fricción μ: 0,32; 0,52 y 0,72. En
los ensayos de pullout, la variación del coeficiente de fricción no ha mostrado poseer una
influencia importante, como se ve en la figura 4.7. Un incremento en el coeficiente de
fricción no retrasa el despegado de la interface. No existe una marcada diferencia en el
comienzo de la parte inestable.
La longitud despegada versus desplazamiento de la fibra se muestra en la figura 4.8.
Puede notarse que el aumento del coeficiente de fricción, tiene poca influencia tanto en el
inicio del proceso de falla, que comienza con un despegado inestable de aproximadamente
0,1 mm para todos los casos, como en la parte inestable de la falla, que comienza entre los
3,5 mm y los 4 mm.
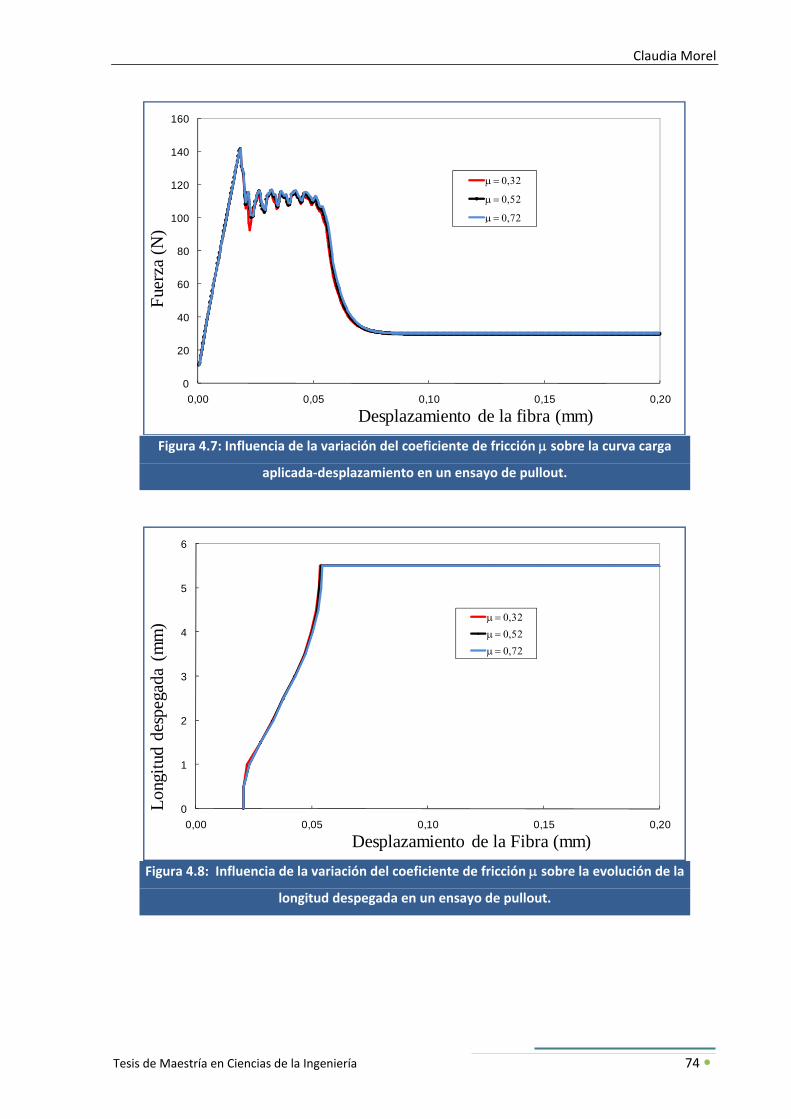
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 74
Figura 4.7: Influencia de la variación del coeficiente de fricción μ sobre la curva carga
aplicada‐desplazamiento en un ensayo de pullout.
Figura 4.8: Influencia de la variación del coeficiente de fricción μ sobre la evolución de la
longitud despegada en un ensayo de pullout.
0
20
40
60
80
100
120
140
160
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la fibra (mm)
μ = 0,32
μ = 0,52
μ = 0,72
0
1
2
3
4
5
6
0,00 0,05 0,10 0,15 0,20
Long
itud
desp
egad
a (m
m)
Desplazamiento de la Fibra (mm)
μ = 0,32
μ = 0,52
μ = 0,72
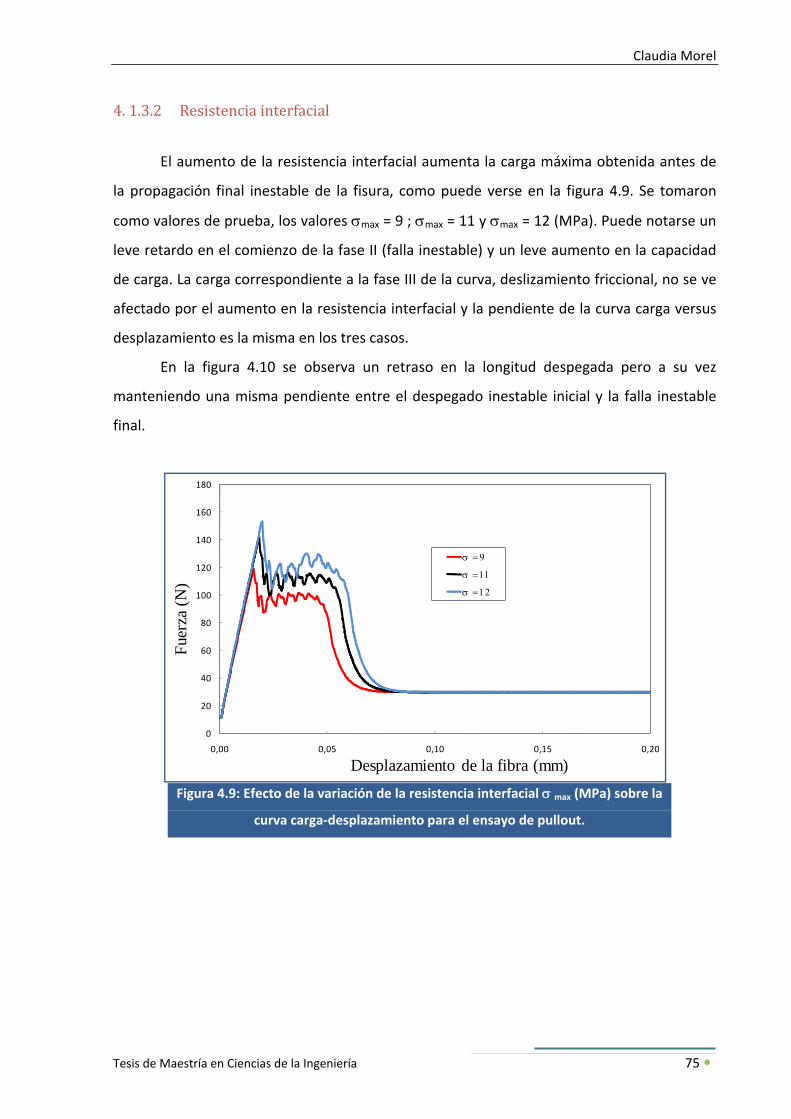
Claudia Morel 4. 1.3.2 Resistencia interfacial
El aumento de la resistencia interfacial aumenta la carga máxima obtenida antes de
la propagación final inestable de la fisura, como puede verse en la figura 4.9. Se tomaron
como valores de prueba, los valores σmax = 9 ; σmax = 11 y σmax = 12 (MPa). Puede notarse un
leve retardo en el comienzo de la fase II (falla inestable) y un leve aumento en la capacidad
de carga. La carga correspondiente a la fase III de la curva, deslizamiento friccional, no se ve
afectado por el aumento en la resistencia interfacial y la pendiente de la curva carga versus
desplazamiento es la misma en los tres casos.
En la figura 4.10 se observa un retraso en la longitud despegada pero a su vez
manteniendo una misma pendiente entre el despegado inestable inicial y la falla inestable
final.
0
20
40
60
80
100
120
140
160
180
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la fibra (mm)
σ = 9
σ = 11
σ = 12
Figura 4.9: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la
curva carga‐desplazamiento para el ensayo de pullout.
Tesis de Maestría en Ciencias de la Ingeniería 75

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 76
Figura 4.10: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre
la evolución de la longitud despegada para el ensayo de pullout
4.1.3.3 Relación de módulos de elasticidad
El efecto que tiene la variación de este parámetro puede observarse en las figuras
4.11 y 4.12. Se tomaron como valores de prueba, los valores Ef/Em = 0,625 ; Ef/Em = 2;
Ef/Em = 3 y Ef/Em = 6. Los resultados experimentales (Bechel & Sottos, 1998b), indican que
la relación de módulos de elasticidad (Ef/Em) tiene un efecto significativo sobre el
mecanismos de falla del compuesto, en especial con respecto a la forma del despegado. La
fibra puede despegarse comenzando desde su parte superior (top debonding) o desde su
parte inferior (bottom debonding), a lo que se llamará a partir de ahora como despegarse
desde arriba o despegarse desde abajo.
La fuerza aplicada P crece a medida que crece la razón Ef/Em, ver figura 4.11.
En la gráfica longitud despegada‐desplazamiento de la fibra, figura 4.12, se observa
que a medida que crece la razón Ef/Em crece también la velocidad con que se despegan los
distintos puntos de la fibra que se separan comenzando desde arriba en dirección hacia
abajo, a lo largo de la fibra. No se obtuvo para el ensayo de pullout, con los materiales
adoptados y las razones Ef/Em analizadas, un despegado que iniciara desde abajo.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,05 0,10 0,15 0,20
Long
itud
des
pega
da (
mm
)
Desplazamiento de la fibra (mm)
σ = 9
σ = 11
σ = 12
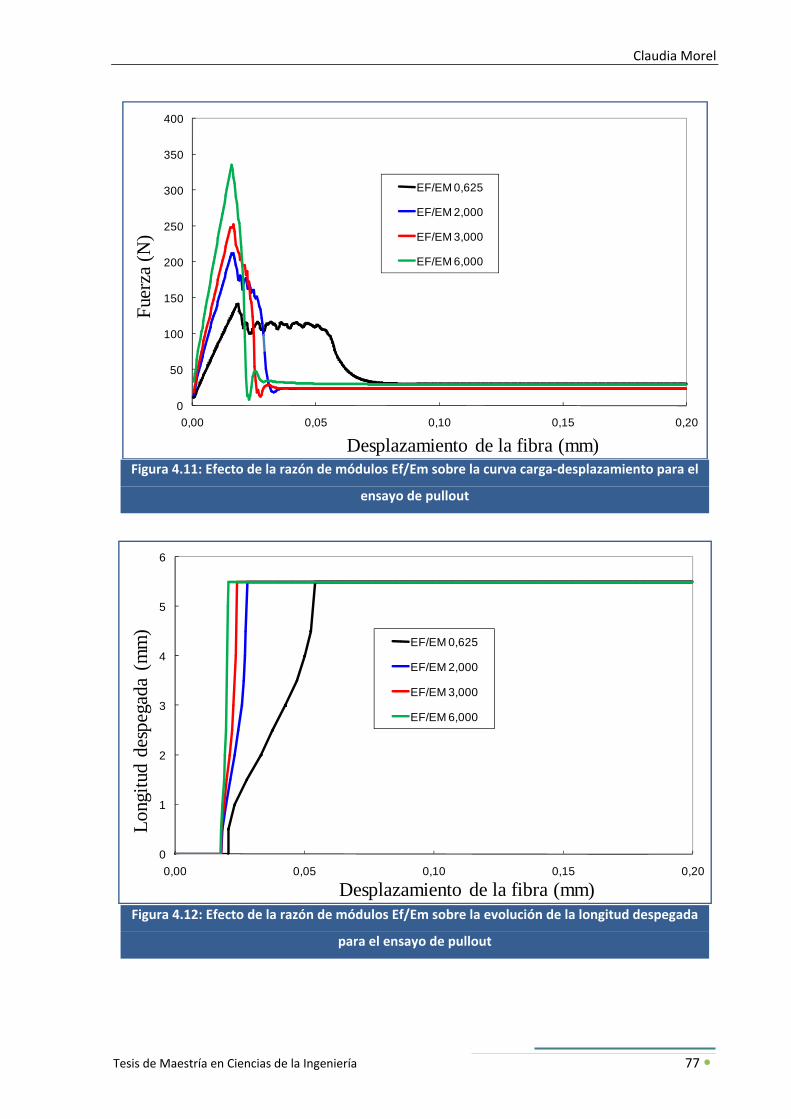
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 77
Figura 4.11: Efecto de la razón de módulos Ef/Em sobre la curva carga‐desplazamiento para el
ensayo de pullout
Figura 4.12: Efecto de la razón de módulos Ef/Em sobre la evolución de la longitud despegada
para el ensayo de pullout
0
50
100
150
200
250
300
350
400
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la fibra (mm)
EF/EM 0,625
EF/EM 2,000
EF/EM 3,000
EF/EM 6,000
0
1
2
3
4
5
6
0,00 0,05 0,10 0,15 0,20
Long
itud
desp
egad
a (m
m)
Desplazamiento de la fibra (mm)
EF/EM 0,625
EF/EM 2,000
EF/EM 3,000
EF/EM 6,000

Claudia Morel
4.2 Simulación numérica del ensayo Pushout
En esta sección se muestran los resultados obtenidos utilizando los modelos de ley
cohesiva descriptos en capítulos anteriores para el ensayo de pushout. El esquema del
ensayo es el mismo que se representa en la figura 4.1, pero en este caso el desplazamiento
prescripto Δp, se aplica sobre el extremo superior de la fibra en el sentido negativo del eje
“Y”, para obtener un ensayo de pushout. Las dimensiones del modelo son las ya descriptas
en el capítulo 4.1, al igual que las propiedades del material. En cuanto a los parámetros de
resistencia para la ley cohesiva, se adoptó una separación crítica y ΔCT = ΔC
N = 0,01 mm,
tanto para la dirección normal como la tangencial. La resistencia cohesiva se tomo igual a
σmax=τmax = 16 MPa para esfuerzo de compresión sobre la fibra.
4.2.1 Modelo de Ley Cohesiva con Carga Combinada Desacoplada
En el ensayo de pushout la ley cohesiva desacoplada (Modelo 3) se aproxima a los
datos experimentales y a los resultados obtenidos por Lin et al mediante MEF, como puede
verse en las figuras 4.13 y 4.14.
Figura 4.13: Carga vs. desplazamiento para Modelo 3 comparado con
Tesis de Maestría en Ciencias de la Ingeniería 78
datos experimentales y ensayos obtenidos por Lin et al (pushout)

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 79
Figura 4.14: Comparación de la curva longitud despegada vs. desplazamiento
entre Modelo 3, datos experimentales y resultados de Lin et al, para el
ensayo de pushout
Estos resultados muestran al Modelo 3 como un modelo de ley cohesiva viable para
ser utilizado en aquellos ensayos donde se sepa de antemano que un esfuerzo es
preponderante del resto de otros esfuerzos, como sucede en los ensayos de pullout y
pushout, donde el esfuerzo de corte es preponderante respecto del esfuerzo normal.
Dado que se busca un modelo más general, que se pueda utilizar en otros
experimentos que sirvan para medir la fuerza cohesiva y que difiera de las características
mencionadas anteriormente, se limita el uso de esta ley cohesiva solo a este tipo de
ensayos.
4.2.2 Modelo de Ley Cohesiva con Carga Combinada Acoplada
Al igual que en el capítulo 4.1.2, se hace una comparación de resultados entre datos
experimentales, resultados obtenidos por Lin et al mediante MEF y resultados obtenidos con
los Modelos de Leyes Cohesivas 1 y 2, definidas anteriormente.
En la figura 4.15, se observa que nuevamente el Modelo 2 se ajusta mejor a los datos
experimentales. Modelos 1 y 2 presentan una fase friccional con una carga menor a la

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 80
obtenida por Lin et al mediante MEF. También se observa que si bien se muestra una caída
de tensión abrupta, es más suavizada que la correspondiente a los datos experimentales.
Existe una diferencia entre los valores de separación para los cuales inicia el
despegado en el Modelo 1 y en el Modelo 2, figura 4.16, pero ambos poseen valores
menores a los correspondientes a Lin et al, y este a su vez es menor que los resultados
dados por los datos experimentales. La semejanza que se da en todos los modelos, es en la
longitud de la fisura que precede a la falla inestable, que en todos los casos se halla
alrededor de los 3,8 mm.
Figura 4.15: Diagrama carga‐desplazamiento para Modelos 1 y 2, resultados
experimentales y resultados obtenidos por Lin et al, para un ensayo de pushout.
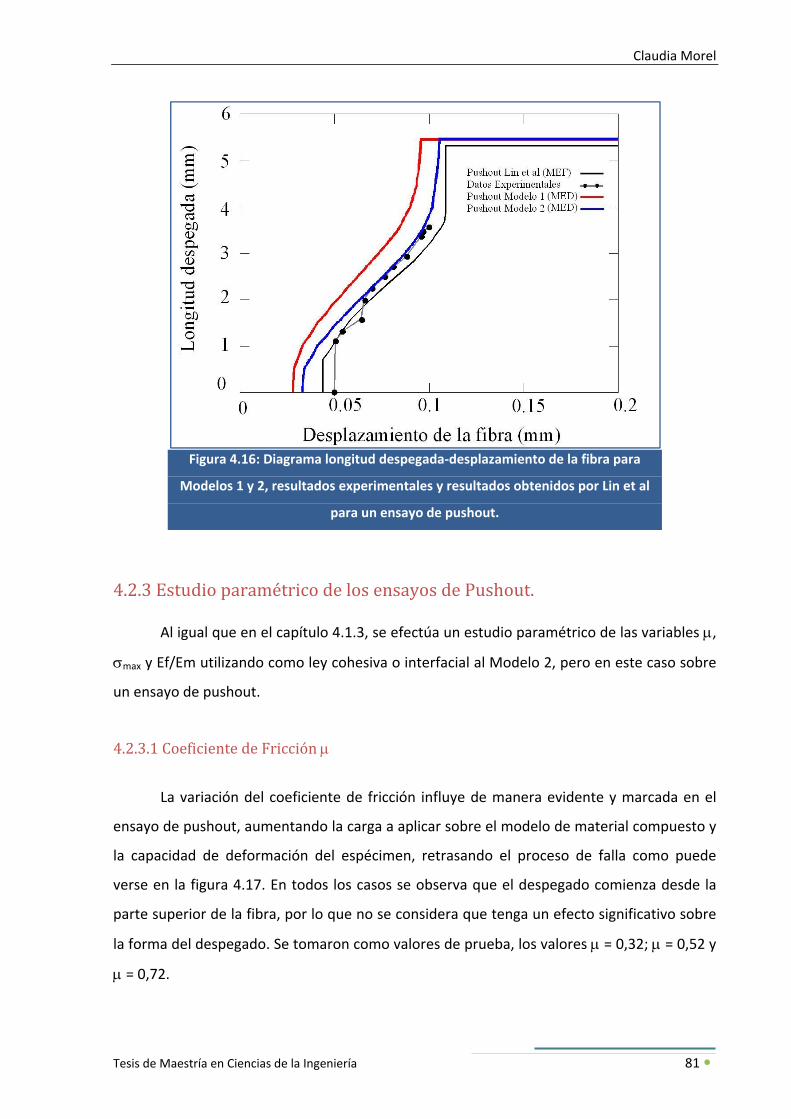
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 81
Figura 4.16: Diagrama longitud despegada‐desplazamiento de la fibra para
Modelos 1 y 2, resultados experimentales y resultados obtenidos por Lin et al
para un ensayo de pushout.
4.2.3 Estudio paramétrico de los ensayos de Pushout.
Al igual que en el capítulo 4.1.3, se efectúa un estudio paramétrico de las variables μ,
σmax y Ef/Em utilizando como ley cohesiva o interfacial al Modelo 2, pero en este caso sobre
un ensayo de pushout.
4.2.3.1 Coeficiente de Fricción μ
La variación del coeficiente de fricción influye de manera evidente y marcada en el
ensayo de pushout, aumentando la carga a aplicar sobre el modelo de material compuesto y
la capacidad de deformación del espécimen, retrasando el proceso de falla como puede
verse en la figura 4.17. En todos los casos se observa que el despegado comienza desde la
parte superior de la fibra, por lo que no se considera que tenga un efecto significativo sobre
la forma del despegado. Se tomaron como valores de prueba, los valores μ = 0,32; μ = 0,52 y
μ = 0,72.
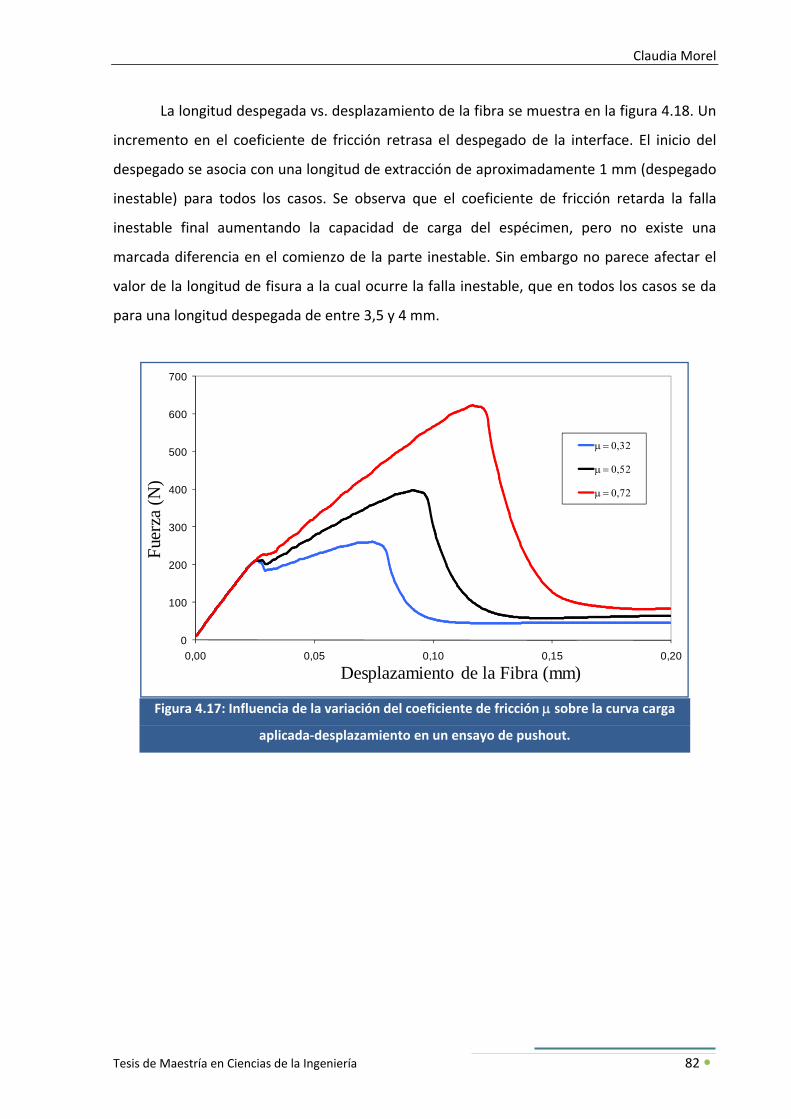
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 82
La longitud despegada vs. desplazamiento de la fibra se muestra en la figura 4.18. Un
incremento en el coeficiente de fricción retrasa el despegado de la interface. El inicio del
despegado se asocia con una longitud de extracción de aproximadamente 1 mm (despegado
inestable) para todos los casos. Se observa que el coeficiente de fricción retarda la falla
inestable final aumentando la capacidad de carga del espécimen, pero no existe una
marcada diferencia en el comienzo de la parte inestable. Sin embargo no parece afectar el
valor de la longitud de fisura a la cual ocurre la falla inestable, que en todos los casos se da
para una longitud despegada de entre 3,5 y 4 mm.
Figura 4.17: Influencia de la variación del coeficiente de fricción μ sobre la curva carga
aplicada‐desplazamiento en un ensayo de pushout.
0
100
200
300
400
500
600
700
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la Fibra (mm)
μ = 0,32
μ = 0,52
μ = 0,72

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 83
Figura 4.18: Influencia de la variación del coeficiente de fricción μ sobre la evolución
de la longitud despegada en un ensayo de pushout.
4.2.3.2 Resistencia interfacial
En las figuras 4.19 Y 4.20 puede observarse el efecto del aumento de la resistencia
interfacial en el proceso de falla para un ensayo de pushout. Se tomaron como valores de
prueba, los valores σmax = 12 ; σmax = 16 y σmax = 24 (MPa). Puede notarse un leve retardo en
el comienzo de la fase II (falla inestable) y un aumento en la capacidad de carga, ver figura
4.19. La carga correspondiente a la fase III de la curva, deslizamiento friccional, no se ve
afectado por el aumento en la resistencia interfacial y la pendiente de la curva carga versus
desplazamiento es la misma en los tres casos.
En la figura 4.20 se observa un retraso en la longitud despegada pero a su vez
manteniendo una misma pendiente entre el despegado inestable inicial y la falla inestable
final. La longitud para la cual inicia la falla inestable final en los tres casos es cercana a los 4
mm.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,05 0,10 0,15 0,20
Long
itud
Des
pega
da (
mm
)
Desplazamiento de la Fibra (mm)
μ = 0,32
μ = 0,52
μ = 0,72

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 84
Figura 4.19: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la
curva carga‐desplazamiento para el ensayo de pushout
Figura 4.20: Efecto de la variación de la resistencia interfacial σ max (MPa) sobre la
evolución de la longitud despegada para el ensayo de pushout
0
100
200
300
400
500
600
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la fibra (mm)
σ = 12σ = 16σ = 24
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,05 0,10 0,15 0,20
Long
itud
desp
egad
a (m
m)
Desplazamiento de la fibra (mm)
σ = 12σ = 16σ = 24
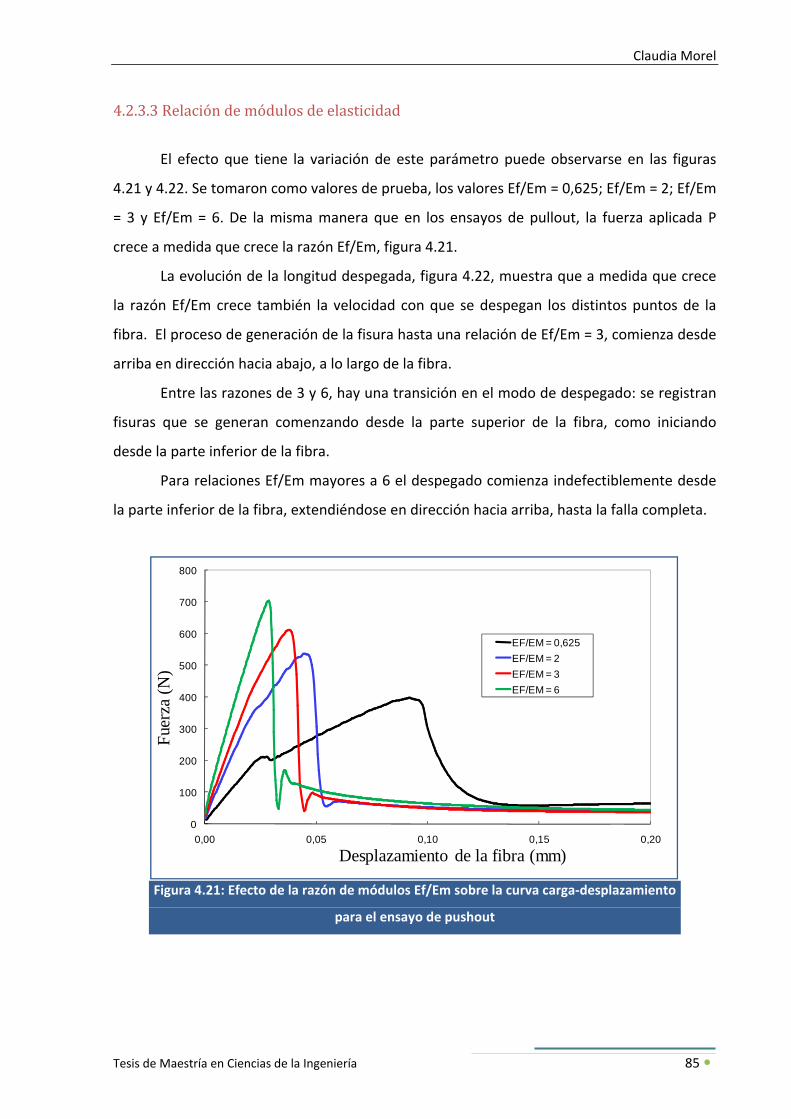
Claudia Morel 4.2.3.3 Relación de módulos de elasticidad
El efecto que tiene la variación de este parámetro puede observarse en las figuras
4.21 y 4.22. Se tomaron como valores de prueba, los valores Ef/Em = 0,625; Ef/Em = 2; Ef/Em
= 3 y Ef/Em = 6. De la misma manera que en los ensayos de pullout, la fuerza aplicada P
crece a medida que crece la razón Ef/Em, figura 4.21.
La evolución de la longitud despegada, figura 4.22, muestra que a medida que crece
la razón Ef/Em crece también la velocidad con que se despegan los distintos puntos de la
fibra. El proceso de generación de la fisura hasta una relación de Ef/Em = 3, comienza desde
arriba en dirección hacia abajo, a lo largo de la fibra.
Entre las razones de 3 y 6, hay una transición en el modo de despegado: se registran
fisuras que se generan comenzando desde la parte superior de la fibra, como iniciando
desde la parte inferior de la fibra.
Para relaciones Ef/Em mayores a 6 el despegado comienza indefectiblemente desde
la parte inferior de la fibra, extendiéndose en dirección hacia arriba, hasta la falla completa.
0
100
200
300
400
500
600
700
800
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la fibra (mm)
EF/EM = 0,625EF/EM = 2EF/EM = 3EF/EM = 6
Figura 4.21: Efecto de la razón de módulos Ef/Em sobre la curva carga‐desplazamiento
para el ensayo de pushout
Tesis de Maestría en Ciencias de la Ingeniería 85

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 86
Figura 4.22: Efecto de la razón de módulos Ef/Em sobre la evolución de la longitud
despegada para el ensayo de pushout
Finalmente se muestran a continuación diversas gráficas de los resultados de las
tensiones obtenidas en el ensayo de pushout, utilizando el sofware ANSYS como post‐
procesador.
En la figura 4.23 puede verse una secuencia de imágenes de la simulación de un
ensayo de pushout para μ = 0,52, σmax = 16 y Ef/Em = 0,625. Puede observarse como el
despegado se inicia desde la parte superior de la fibra continuando hacia abajo.
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,05 0,10 0,15 0,20
Long
itud
desp
egad
a (m
m)
Desplazamiento de la fibra (mm)
EF/EM = 0,625EF/EM = 2EF/EM = 3EF/EM = 6

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 87
Figura 4.23. Secuencia de imágenes: Vista en perspectiva y en corte transversal de las tensiones principales
En la figura 4.24 se muestra para el mismo ejemplar de la figura 4.23, una vista
también en perspectiva de un corte transversal de la gráfica de las isosuperficies de las
tensiones principales.
En la figura 4.25 se puede apreciar en perspectiva y en corte transversal, el estado de
tensiones de corte en el plano “XY”.
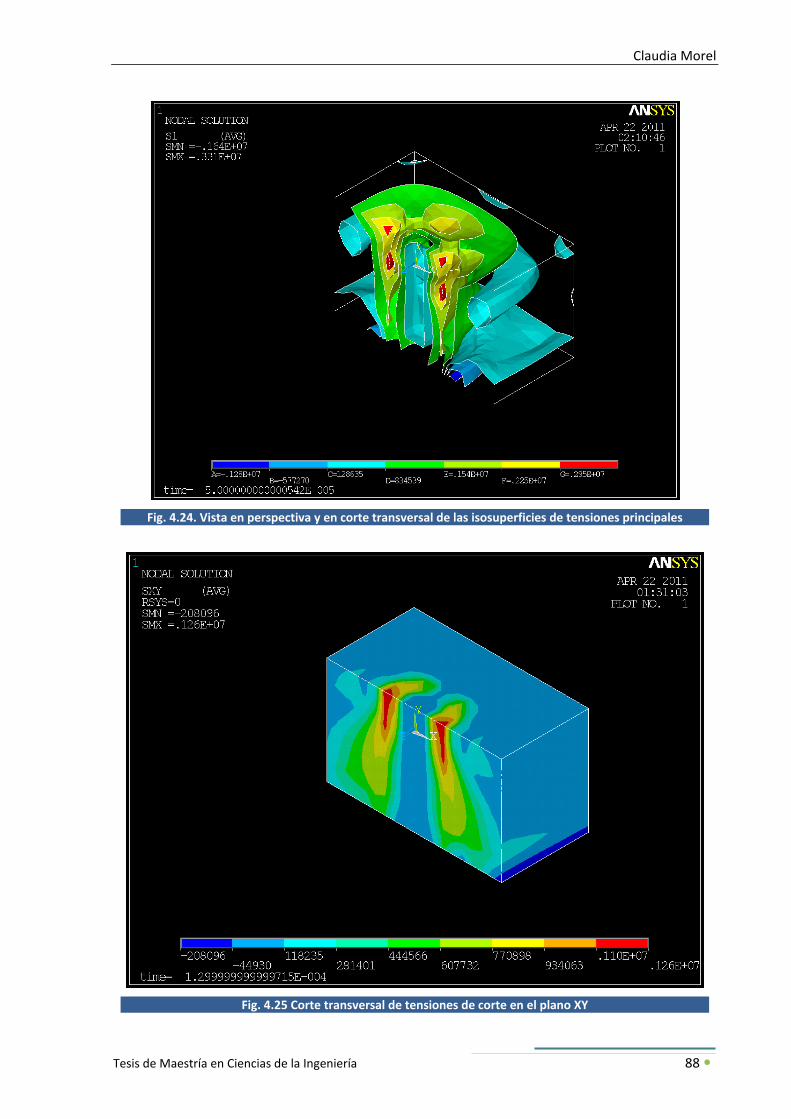
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 88
Fig. 4.24. Vista en perspectiva y en corte transversal de las isosuperficies de tensiones principales
Fig. 4.25 Corte transversal de tensiones de corte en el plano XY

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 89
Capítulo 5 Conclusiones
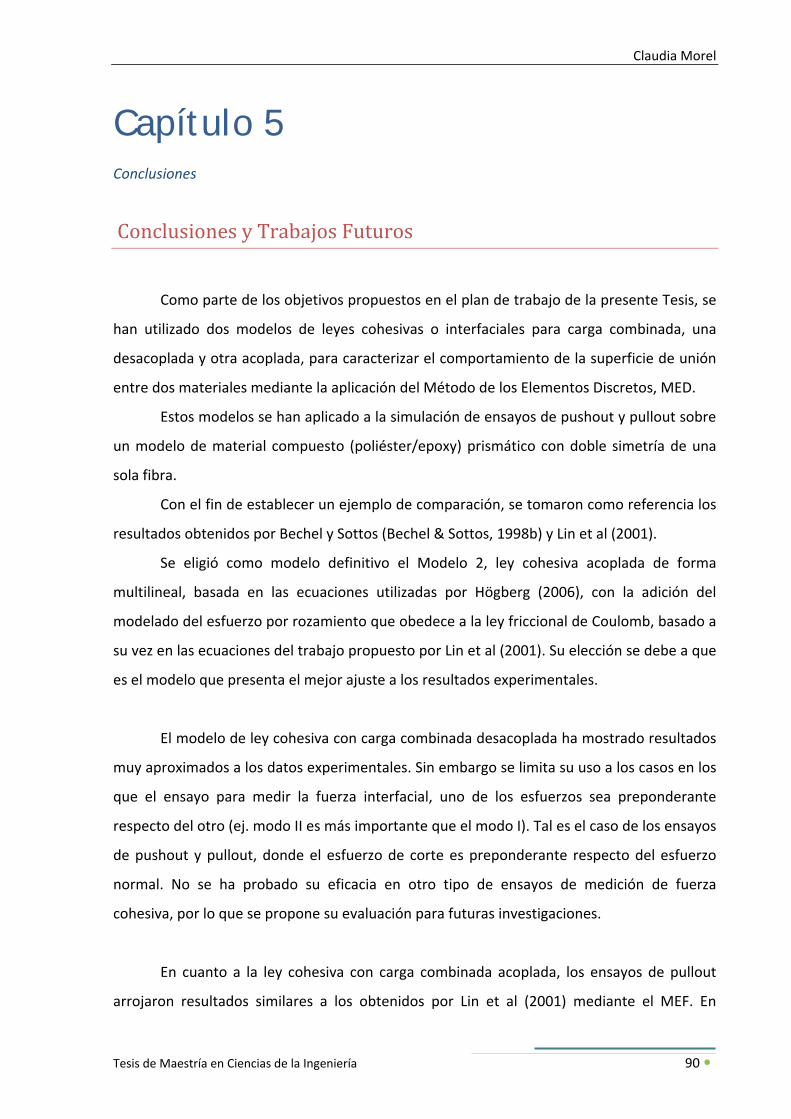
Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 90
Capítulo 5 Conclusiones
Conclusiones y Trabajos Futuros
Como parte de los objetivos propuestos en el plan de trabajo de la presente Tesis, se
han utilizado dos modelos de leyes cohesivas o interfaciales para carga combinada, una
desacoplada y otra acoplada, para caracterizar el comportamiento de la superficie de unión
entre dos materiales mediante la aplicación del Método de los Elementos Discretos, MED.
Estos modelos se han aplicado a la simulación de ensayos de pushout y pullout sobre
un modelo de material compuesto (poliéster/epoxy) prismático con doble simetría de una
sola fibra.
Con el fin de establecer un ejemplo de comparación, se tomaron como referencia los
resultados obtenidos por Bechel y Sottos (Bechel & Sottos, 1998b) y Lin et al (2001).
Se eligió como modelo definitivo el Modelo 2, ley cohesiva acoplada de forma
multilineal, basada en las ecuaciones utilizadas por Högberg (2006), con la adición del
modelado del esfuerzo por rozamiento que obedece a la ley friccional de Coulomb, basado a
su vez en las ecuaciones del trabajo propuesto por Lin et al (2001). Su elección se debe a que
es el modelo que presenta el mejor ajuste a los resultados experimentales.
El modelo de ley cohesiva con carga combinada desacoplada ha mostrado resultados
muy aproximados a los datos experimentales. Sin embargo se limita su uso a los casos en los
que el ensayo para medir la fuerza interfacial, uno de los esfuerzos sea preponderante
respecto del otro (ej. modo II es más importante que el modo I). Tal es el caso de los ensayos
de pushout y pullout, donde el esfuerzo de corte es preponderante respecto del esfuerzo
normal. No se ha probado su eficacia en otro tipo de ensayos de medición de fuerza
cohesiva, por lo que se propone su evaluación para futuras investigaciones.
En cuanto a la ley cohesiva con carga combinada acoplada, los ensayos de pullout
arrojaron resultados similares a los obtenidos por Lin et al (2001) mediante el MEF. En

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 91
especial debe destacarse que las curvas carga‐desplazamiento poseen la forma característica
presentada en el capítulo I: con una primera fase lineal, a la que sigue una fase no lineal que
desciende de manera brusca para culminar con una tercera fase friccional que corresponde
al esfuerzo de fricción que se da entre los dos materiales unidos. Cabe señalar que la fase II
en los ensayos de pullout se presenta formando una meseta.
La variación del coeficiente de fricción no mostró influencia alguna en la carga a
aplicar sobre la fibra para su extracción. El aumento en la resistencia interfacial, aumenta la
carga máxima y retrasa el inicio de la fase II de la curva carga‐separación. Mientras que la
razón de módulos de Young, aumenta la carga máxima y acelera el inicio de la fase II de la
curva carga‐separación. En todos los casos, la forma de despegado de la fibra fue iniciando
desde arriba de manera continua hacia abajo, a lo largo de la misma.
Los ensayos de pushout presentan gráficas carga‐desplazamiento y de propagación
de fisura muy próximas a los resultados dados por datos experimentales y a los obtenidos
por Lin et al (2001) mediante el MEF. Dichas gráficas presentan las tres fases características
en la curva carga‐deformación, bien definidas.
La carga a aplicar a la fibra para su extracción aumenta notablemente respecto del
ensayo de pullout. El coeficiente de fricción es uno de los parámetros más importantes que
afectan la tenacidad a la fractura global del compuesto. Este parámetro aumenta la
capacidad de carga y retrasa la inestabilidad asociada con el despegado completo de la
interface fibra‐matriz. Sin embargo existe un límite para el valor máximo de las tensiones de
fricción, puesto que un valor excesivo puede conducir a la fractura prematura del material
componente de la fibra o de la matriz. El rol esencial del contacto friccional en la estabilidad
del proceso de falla puede verse en las figuras 5.1 a 5.2, donde se comparan los ensayos de
pushout y pullout, en función de la curva carga‐desplazamiento, figura 5.1, y de la curva
longitud despegada‐desplazamiento de la fibra, figura 5.2. Se puede notar la drástica
diferencia en las deformaciones y la falla. En el ensayo de pullout, la fibra, al no tener
contacto con nada que impida su avance, presenta una fase II de la curva carga‐
desplazamiento casi constante y una carga máxima cercana a un cuarto de la que se obtiene
en el ensayo de pushout.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 92
Figura. 5.1: Comparación de los ensayos de pushout y pullout: Carga versus
desplazamiento de la fibra
Figura. 5.2: Comparación entre ensayo de pushout y pullout: Longitud
despegada versus desplazamiento de la fibra
En el estudio paramétrico, se observa que el aumento de la resistencia friccional
aumenta la capacidad de carga retrasando el inicio de la fase II y que el aumento de la razón
de módulos de Young tiene el efecto inverso. Ambos parámetros no afectan la parte
0
50
100
150
200
250
300
350
400
450
0,00 0,05 0,10 0,15 0,20
Fuer
za (N
)
Desplazamiento de la fibra (mm)
Pullout
Pushout
0,00
1,00
2,00
3,00
4,00
5,00
6,00
0,00 0,05 0,10 0,15 0,20
Long
itud
desp
egad
a (m
m)
Desplazamiento de la fibra (mm)
Pullout
Pushout

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 93
friccional de la curva carga‐desplazamiento. Se obtuvo para razones de módulos de Young
menores a 3, un despegado que inicia en la parte superior de la fibra y prosigue de manera
continua hacia la parte inferior de la fibra. Para razones entre 3 y 6, existe una transición en
la forma del despegado. Finalmente para razones mayores a 6, el despegado comienza
desde la parte inferior de la fibra y continua hacia la parte superior, de manera continua
hasta el despegado completo.
Los resultados obtenidos muestran que el MED puede ser una alternativa válida y
económica, en términos de simplicidad y tiempo, al MEF, para el modelado de la ley
cohesiva.
Debe aclararse en este sentido, las limitaciones propias del MED. Este método no
posibilita la utilización de módulos de Poisson superiores a 0,25. Posee poca flexibilidad en el
modelado de piezas curvas, dado que los elementos de discretización son cubos de lados
rectos. Sin embargo es una herramienta muy eficaz para modelar piezas prismáticas. Se
propone como trabajo de investigaciones futuras, la simulación numérica de estos ensayos
con piezas cilíndricas.
Existe una combinación óptima de los parámetros que maximiza la tenacidad a la
fractura global del material compuesto. La búsqueda de esta combinación puede ser el
objetivo de futuras investigaciones.
La caracterización del deslizamiento friccional de una fibra contenida dentro de una
matriz sigue siendo objeto de estudio, el modelo presentado en esta tesis reproduce los
ensayos de pushout y pullout con resultados que se aproximan a los resultados
experimentales.
Para que las leyes cohesivas posean una verdadera capacidad de predecir la falla
interfacial, se debe contar con experimentos mecánicos que provean con precisión los
valores de los parámetros característicos.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 94
Bibliografía Risø National Laboratory. (2009). Interface design of composite materials. Denmark. National
Laboratory for Sustainable Energy. Abdul‐Baqi, A., Schreurs, P. J., & Geers, M. G. (2005). Fatigue damage modeling in solder
interconnects using a cohesive zone approach. Int J Solids Struct , 42, 927–42. ASTM International. (2004). Standard Test Methods for Strength Properties of Adhesives in Cleavage
Peel by Tension Loading. (D 3807‐98) . Atkinson, C. A. (1982). The rod pull out problem, theory and experiment. Journal of the Mechanics
and Physics of Solids , 30, 97‐120. Barenblatt, G. I. (1962). The mathematical theory of equilibrium cracks in brittle fracture. Adv Appl
Mech , 7, 55‐129. Barrios D'Ambra, R., Iturrioz, I., Cóceres, H., & Kosteski, L. (2006). Determinación del Factor de
Intensidad de Tensiones aplicando el Método de los Elementos Discretos. XXXII Jornadas Sudamericanas de Ingeniería Estructural .
Barrios D'Ambra, R., Iturrioz, I., Fasce, L. A., Frontini, P. M., & A.P., C. (2003). Simulación numérica del ensayo de impacto en probetas de polímeros utilizando el método de los elementos discretos. Cilamce.
Barrios D'Ambra, R., Iturrioz, I., Fasce, L. A., Frontini, P. M., & P., C. A. (2002). Utilización del método de los elementos discretos en la simulación numérica de ensayos de impacto para caracterización de materiales compuestos poliméricos. Mecánica Computacional , XXI, 1121‐1134.
Bažant, Z. P. ( 1993). Current status and advances in the theory of creep and interaction with fracture. Proc. 5th Int. RILEM Symposium on Creep and Shrinkage of Concrete , 291‐307.
Bechel, V. (1997). The application of debond length measurements to examine the accuracy of composite interface properties derived from fiber pusout testing. PhD Thesis . University of Illinois, Urbana, Champaign.
Bechel, V., & Sottos, N. (1998). A comparison of calculated and measured debond lengths from fiber pushout test. Comp. Sci. Technol. , 58, 1727‐1739.
Bechel, V., & Sottos, N. (1998b). Application of debond length measurements to examine the mechanics of fiber push out. J. Mech. Phys. Solids , 46 (9), 1675‐1697.
Bechel, V., & Sottos, N. (1998c). The effect of residual stresses and sample preparation on progressive debonding during the fiber pushout test. Comp. Sci. Technol. , 58, 1741‐1751.
Beckert, W., & Lauke, B. (1995). Fracture mechanics finite element analysis of debonding crack extension for a single fibre pull‐out specimen. J. Mater. Sci. Lett. , 14, 333‐336.
Bosch van den, M. J., Schreurs, P. J., & Geers, M. G. (2006). An improved description of the exponentail Xu and Needleman cohesive zone law for mixed‐mode decohesion. Engng. Frac. Mech. , 73, 1220‐1234.
Bourke, M. A., Goldstone, J. A., Stout, M. G., & Needleman, A. (1993). Characterization of Residual Stresses in Composites. In Fundamentals of Metal‐Matrix Composites. Butterworth‐Heinemann.
Brocks, W., Cornec, A., & Scheider, I. (2003). Computational Aspects of Nonlinear Fracture Mechanics. (I. In: Milne, R. Ritchie, & B. (. Karihaloo, Eds.) Comprehensive Structural Integrity ‐ Numerical and Computational Methods , 3, 127 ‐ 209.
Broek, D. (1984). Elementary engineering fracture mechanics. The Netherlands: Martinus Nijhoff Publishers.
Brun, M. K., & Singh, R. N. (1988). Effect of thermal expansión mismatch and fiber coating on the fiber/matrix interfacial shear stress in ceramic matrix composites. Adv. Cer. Mal. , 3, 506‐509.
Camacho, G. T., & Ortiz, M. (1996). Computational modeling of impact damage in brittle materials. Int. J. Solids Struct. , 33 (20‐22), 2899‐2938.
Cannon, R. M., Dalgleish, B. J., Dauskarft, R. H., & etal. (1992). In: Fatigue of Advanced Materials. Edgbaston, UK: (R. O. Ritchie, R. H. Dauskardt, and . N. Cox, eds) MCEP Publishing Ltd.
Carpinteri, A. (1986). Mechanical damage and crack growth in concrete. Martinus Nijhoff Kluwer .

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 95
Chaboche, J., Girard, R., & Levasseaur, P. (1997). On the interface debonding models. Int. J. Damage Mech. , 6, 220‐257.
Chandra, N. A. (1995). Analysis of interfacial behavior in MMCs and IMCs by the use of thin‐slice push‐out tests. Comp. Sci. Technol. , 54, 87‐100.
Cordes, R. D. (1995). Determination of interfacial properties from obser‐vations of progressive fiber debonding and pullout. Comp. Eng. , 5, 633‐648.
Cundall, P. (1971). A computer model for simulating progressive large scale movements in block rock systems. Nancy, France: Symp. Int. Soc. Of Rock Mech. .
Daniel, I. M. (1993). The behavior of ceramic matrix fiber composites under longitudinal loading. Comp. Sci. Tech. , 46, 105‐113.
Eldridge, J. I. (1995). Elevated temperature fiber push‐out testing. Mat. Res. Soc. Symp. Proc. , 365, 283‐290.
Elices, M., Guinea, G. V., Gòmez, J., & Planas, J. (2002). The cohesive zone model: advantages, limitations and challenges. Eng. Fract. Mech. , 69, 137‐163.
Evans, A. G., & Hutchinson, J. W. (1989). Acta Metall. Mater. 37, 909‐916. Evans, A. G., Ruhle, M., Dalgleish, B. J., & Charalambides, P. (1990). Mater. Sci. Eng. A. 12, 53‐64. Freund, L. B. (1991). The axial force needed to slide a circular fiber along a hole in an elastic material
and implications for fiber pull‐out. Eur. J. Mech. A/Solids , 11, 1‐19. Gdoutos, E. E. (2005). Fracture Mechanics, An Introduction. Springer (Second Edition). Geubelle, P., & Baylor, J. (1998). Impact‐induced delamination of laminated composites: a 2D
simulation. Composites B , 29, 589‐602. Ghosh, A. K. (1993). Solid‐State Processing. In Fundamentals of Metal Matrix Composites.
Butterworth‐Heinemann. Griffith, A. A. (1924). The theory of rupture. Proceedings of First International Congress of Applied
Mechanics, Delft , 55‐63. Griffith, A. (1921). The phenomena of rupture and flow in solids. Philosophical Transactions of the
Royal Society of London , 163‐198. Guinea, G. V., Planas, J., & Elices, M. (1994). A general bilinear fit for the softening curve of the
concrete. Mater. Struct. , 27, 99‐105. Hanson, J. H., & Bittencourt, T. N. (2004). Three‐dimensional influence coefficient method for
cohesive crack simulations. Engng Fract Mech , 71, 2109–24. Hayashi, Y. (1982). Sobre un modelo de discretizaçao de estruturas tridimensionais aplicado em
dinâmica não linear. Dissertação (Mestrado), Curso de Pós‐Graduação em Engenharia Civil . Porto Alegre: Universidade federal do Rio Grande do Sul.
Hillerborg, A., Modeer, M., & Petersson, P. E. (1976). Analysis of crack formation and crack growthin concrete by means of fracture mechanics and finite elements. Cement Concrete Res. , 6, 773‐782.
Hocking, G. M. (1985). CICE discrete element analysis code–theoretical manual. Lakewood, CO: Applied Mechanics Inc.
Hocking, G. W. (1985). Validation of the CICE discrete element code for ice ride‐up and ice‐ridge/cone interaction. San Francisco: ARTIC '85 ASCE.
Högberg, J. L. (2006). Mixed Mode Cohesive Law. Int J Fract , 141, 549–559. Hutchinson, J. W. (1990). Models of fiber debonding and pullout in brittle composites with friction .
Mech. Mat. , 9, 139‐163. Irwin, G. R. (1960). Structural Mechanics. (J. G. Hoff, Ed.) 557‐591. Iturrioz, I. (1995). Aplicação de Método dos Elementos Discretos ao estado de Estruturas Laminares
de Concreto Armado. Dissertação (Doutorado), Curso de Pós‐Graduação em Engenharia Civil . Porto Alegre: Universidade Federal do Rio Grande do Sul.
Iturrioz, I., & Riera, J. (2001). Estudio numérico del efecto de explosivos sobre una superficie plana. Mecánica Computacional , 20, 422‐429.
Jero, P. D. (1990). The contribution of interfacial roughness to sliding friction of ceramic fibers in a glass matrix. Scripta Metall. Mat. , 24, 2315‐2318.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 96
Kallas, M. N. (1992). Interfacial stress state present in a 'thin slice' fiber push‐out test. J. Mater. Sci. , 27, 3821‐3826.
Koss, D. A. (1993). Fiber pushout and interfacial shear in metal‐matrix composites. JOM , 45, 34‐37. Kosteski, L. E. (2008). Aplicaciones del Método de Elementos iscretos en Mecánica de Fractura
Estática y Dinámica. Tesis de Maestría . Resistencia: UNNE‐facultad de Ingeniería. Kosteski, L., Barrios D'Ambra, R., Iturrioz, I., Fasce, L., Frontini, P., & Cisilino, A. (2004). Estudio
Paramétrico de ensayos mecánicos de un material polimérico utilizando el Método de los Elementos Discretos. XXXI Jornadas Sudamericanas de Ingeniería Estructural. Mendoza‐Argentina.
Kosteski, L., Cóceres, H., Barrios D'Ambra, R., Iturrioz, I., & Cisilino, A. (2006). Aplicación del Método de los Elementos Discretos para la determinación del factor de intensidad de tensiones estático y dinámico. XV Congreso sobre Métods Numéricos y sus Aplicaciones. ENIEF 2006. Mecánica Computacional , 25 (22), 2109‐2123.
Kubair, D. V., & Geubelle, P. H. (2003). Comparative analysis of extrinsic and intrinsic cohesive models of dynamic fracture. International Journal of Solids and Structures , 40, 3853–3868.
Laughner, J. W. (1986). Simple indentation method for measurement of interfacial shear strength in SiC/Si3N4 composites. Cer. Eng. and Sci.Proc. , 7, 932.
Li, S., Thouless, M. D., Waas, A. M., Schroeder, J. A., & Zavattieri, P. D. (2005). Use of a cohesive‐zone model to analyze the fracture of a fiber reinforced polymer–matrix composite. Compos Sci Technol , 65, 537–49.
Li, S., Thouless, M. D., Waas, A. M., Schroeder, J. A., & Zavattieri, P. D. (2005). Use of mode‐I cohesive‐zone models to describe the fracture of an adhesively‐bonded polymer–matrix composite. Compos Sci Technol , 65, 281–93.
Li, S., Thouless, M., Waas, A., Schroeder, J., & Zavattieri, P. (2006). Mixed‐mode cohesive‐zone models for fracture of an adhesively bonded polymer–matrix composite. Eng Fract Mech , 73, 64‐78.
Liang, C. H. (1993). Mechanics of the fiber pushout test. Mech. Mat. , 14, 207‐221. Lin, G., Geubelle, P. H., & Sottos, N. R. (2001). Simulation of fiber debonding with friction in a model
composite pushout test. Int. J. Solids and Struct. , 38 , 8547‐8562. Lin, G., Kim, Y. J., Cornec, A., & Schwalbe, K. (1998). Numerical analysis of ductile failure of
undermatched interleaf in tension. Int. J. Fract. , 91, 323‐347. Mackin, T. J. (1992). Influence of fiber roughness on the sliding behavior of sapphire fibers in TiAl and
glass matrices. J. Am. Ceram. Soc. , 75, 3358‐3362. Mellado Cruz, J. (2005). Aplicación del Método de los Elementos Discretos a problemas de desgaste.
Universitat Politécnica de Catalunya. Minor Thesis . Munjiza, A., Bangash, T., & John, N. W. (2004). The combined Finite‐Discrete Element Method for
Structures Failure and Collapse. Engng. Frac. Mech. , 71, 469‐483. Nayfeh, A. H., & Hefzy, M. S. (1978). Continuum Modelling of Three‐Dimensional Truss‐like Space
Structures. AIAA Journal , 16, 779‐787. Needleman, A. (1987). A continuum model for void nucleation by inclusion debonding. J Appl Mech ,
54, 525‐531. Needleman, A. (1990). An analysis of decohesion along an imperfect interface. Int. J. Fract. , 42, 21‐
40. Needleman, A. (1997). Numerical modelling of crack growthunder dynamic loading conditions. Comp.
Mech. , 19 (6), 463‐469. Needleman, A., Nutt, S. R., Suresh, S., & Tvergaard, V. (1993). Matrix, reinforcement, and Interfacial
Failure. In Fundamentals of Metal‐Matrix Composites. Netravali, A. N. (1989). Continuous microindenter push‐through technique for measuring interfacial
shear strength of fiber composites. Comp. Sci. Tech. , 34, 239‐303. O’Dowd, N. P., Stout, M. G., & Shih, C. F. (1992). Phil Mag 66A. 1037‐1064. Ostoja_Starzenski, M. (1995). Spring‐Networks in thermomechanics: Effective properties and fracture
phenomena. Applied Mechanics in the Americas , III, 179‐184.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 97
Pande, G. B. (1990). Numerical Methods in Rock Mechanics. England: John Willey & Sons. Pantano, A., & Avrill, R. C. (2004). A mesh‐independent interface technology for simulation of mixed‐
mode delamination growth. Int J Solid Struct , 41, 3809–3831. Petersson, P. E. (1981). Crack growth and development of fracture zones in plain concrete and similar
materials. Report TVBM‐1006, Division of Building Materials, Lund Institute of Technology . Povirk, G. L. (1993). Finite element simulations of fiber pull‐out. J. Appl. Mech. , 115, 286‐291. Riera, J. D. (1980). A Critical Reappraisal of Nuclear Power Plant Safety Against Accidental Aircraft
Impact. Nuclear Engineering and Design , 57, 193‐206. Riera, J. D. (1984). Local Effects in Impact Problems on Concretes Structures. Proceedings, Conference
on Structural Analysis and Design of Nuclear Power Plants , III, 57‐79. Riera, J. D., & Iturrioz, I. (1998). Discrete element dynamic response of elastoplastic shells subjected
to impulsive loading. Nuclear Engineering and Design , 179, 135‐144. Rocha, M. M. (1989). Ruptura e efeito de escala em materiais não homogêneos de comportamento
frágil. Dissertação (Mestrado), Curso de Pós‐Graduação em ENgenharia Civil . Porto Alegre: Universidade Federal do Rio Grande do Sul.
Rose, J., Ferrante, J., & Smith, J. (1981). Universal binding energy curves for metals and bimetallic interfaces. Phys. Review Letters , 47, 675‐678.
Roy Chowdhury, S., & Narasimhan, R. (2000). A finite element analysis of quasistatic crack growth in a pressure sensitive constrained ductile layer. Eng. Fract. Mech. , 66, 551‐571.
Salomonsson, K. ( 2002 ). Interphase elements connection structural finite elements formulation, implementation and verification . Master thesis. Chalmers University of Technology, Göteborg, Sweden , (Available at www.his.se/MechMat).
Schallamach, A. (1971). How does rubber slide? Wear , 17 (4), 301‐312. Scheider, I. (2000). Bruchmechanische Bewertung von Laserschweißverbindungen durch numerische
Rissfortschrittsanalysen mit dem Kohäsivzonenmodell. PhD Thesis, Technical University Hamburg‐Harburg .
Schlangen, E. (1993). Experimental and Numerical analysis of fracture processes in concrete. Heron , 38 (3), 1‐118.
Shetty, D. K. (1988). Shear‐lag analysis of fiber push‐out (indentation) tests for estimating interfacial friction stress in ceramic‐matrix composites. J. Am. Ceram. Soc. , 71 (2), C107‐C109.
Shi, G. (1988). Discontinuous deformation analysis: a new method for computing stress, strain and sliding of block systems. PhD Thesis . Berkeley: Departament Civil Engineering, University of California.
Siegmund, T., & Brocks, W. (1998). Tensile decohesion by local failure criteriax. Technische Mechanik , 18, 261‐270.
Simulation of fracture of cementitious composites with explicit modeling of. (n.d.). Sørensen, B., & Jacobsen, T. (2003). Determination of cohesive laws by the J integral approach.
Engineering Fracture Mechanics , 70, 1841‐1858. Tech, T. W., Batista, R., Iturrioz, I., & Cisilino, A. (2003). Aplicação do Método dos Elementos
Discretos em Mecânica de Fratura Estática e Dinâmica. Cilamce. Tijssens, M. G., Sluys, L. J., & Van der Giessen, E. (2001). Simulation of fracture of cementitious
composites with explicit modeling ofmicrostructural features. Engng Fract Mech , 68, 1245–63. Tijssens, M. G., Van der Giessen, E., & Sluys, L. J. (2000). Modeling of crazing using a cohesive surface
methodology. Mech Mater , 32, 19‐35. Tsai, K.‐H. a. (1996). The micromechanics of fiber pull‐out. Journal of the Mechanics and Physics of
Solids , 44, 1147‐1177. Tsai, K.‐H. a. (1991). A study of stick slip behavior in interface friction using optical fiber pulí out
experiment. SPIE, Speckle Techniques, Birefringence Methods, and Applications to Salid Mechanics , 1554A, 529‐541.
Tvergaard, V. (1990). Effect of fibre debonding in a Whisker‐reinforced metal. Mater Sci Engng A , 125, 203‐13.

Claudia Morel
Tesis de Maestría en Ciencias de la Ingeniería 98
Tvergaard, V., & Hutchinson, J. (1992). The relation between crack growth resistance and fracture process parameters in elastic–plastic solids. J Mech Phys Solids , 40, 1377–1397.
Tvergaard, V., & Hutchinson, J. W. (1996). On the toughness of ductile adhesive joints. J Mech Phys Solid 44 , 44 (5), 789–800.
Tvergaard, V., & Hutchinson, J. W. (1993). The influence of plasticity on mixed mode interface toughness. J. Mech. Phys. Solids , 41, 1119‐1135.
Warren, P. D. (1992). Design, analysis, and application of an improved push‐through test for the measurement of interface properties in composites. Acta Metall. Mater. , 40, 1243‐1249.
Watson, M. C. (1992). The use of single fibre pushout testing to explore interfacial mechanics in SiC monofilament‐reinforced Ti—I. A photoelastic study of the test. Acta. Metall. Mater. , 40, 131‐139.
Williams, J., Hocking, G., & Mustoe, G. (1985). The theoretical basis of the discrete element method. Proceedings of the International Conference on Numerical Methods in Engineering: Theory and Applications , 897‐906. Swansea.
Xu, X.‐P., & Needleman, A. (1993). Void nucleation by inclusion debonding in a crystal matrix. Modelling Simul. Sci. Engng. , 1, 111‐132.
Yuan, H., & Cornec, A. (1991). Numerical simulations of ductile crack growth in thin specimens based on a cohesive zone model. GKSS report 91/E/23 .
Zhigang Suo, F. S. (1993). Models for Metal/Ceramic Interface Fracture. In Fundamentals of Metal‐Matrix Composites. Butterworth‐Heinemann.
Top Related