







Idiomas
Páginas
Jurídico

INSTITUTO UNIVERSITARIO DE TECNOLOGÍA
“ANTONIO JOSÉ DE SUCRE”
ESCUELA DE ELECTRICIDAD
EXTENSIÓN SAN FELIPE
Integrante:
Christian Rodriguez
5to Semestre
Escuela 70
SAN FELIPE JULIO 2013
RESPUESTA DE FRECUENCIA Y
TRAZAS DE BODE
Concepto de Respuesta en Frecuencia
El método de la respuesta en frecuencia puede ser menos intuitivo que otros métodos que se han estudiado anteriormente. Sin embargo, tiene ciertas ventajas, especialmente en situaciones reales como modelado de funciones de
transferencia a partir de datos físicos, ya que se especifica el comportamiento de la respuesta transitoria de una forma indirecta, es decir el comportamiento de la
respuesta transitoria se especifica en términos de margen de fase, el margen de ganancia y la magnitud del pico de resonancia . la frecuencia de cruce de ganancia, la frecuencia de resonancia y el ancho de banda y las constantes de
error estático aunque la correlación de las respuestas transitorias y la respuesta en frecuencia es indirecta, las especificaciones en el dominio de la frecuencias se
cumplen adecuadamente en el método de diagrama de bode.
La respuesta en frecuencia de un sistema puede verse de dos maneras distintas: vía el diagrama de Bode, o vía el Diagrama de Nyquist. Ambos métodos presentan la misma información; la diferencia radica en la manera en que se
presenta la información. Básicamente hay dos enfoques de diseños en el dominio de la frecuencia. Uno es el enfoque del diagrama polar y el otro es el enfoque del
diagrama de bode. Cuando se añade un compensador, el diagrama polar no conserva su forma original, por lo que es necesario dibujar un nuevo diagrama polar, lo cual lleva tiempo y por lo tanto, no es conveniente.
La respuesta en frecuencia es una representación de la respuesta del
sistema a entradas sinusoidales a frecuencia variable. La salida de un sistema lineal a una entrada sinusoidal es una sinusoide de la misma frecuencia pero con
distinta magnitud y fase. La respuesta en frecuencia se define como las diferencias de magnitud y fase entre las sinusoides de entrada y salida. En esta Guía, veremos cómo podemos usar la respuesta en frecuencia de un sistema a
lazo abierto para predecir su comportamiento a lazo cerrado. Si no se satisfacen las especificaciones del margen de fase y del margen de ganancia. Se determina
un compensador adecuado.
Para graficar la respuesta en frecuencia, creamos un vector de frecuencias (entre cero o "DC" e infinito) y calculamos el valor de la función de transferencia de la planta a estas frecuencias. Si G(s) es la función de transferencia de un sistema
a lazo abierto y w es el vector frecuencia, grafiquemos entonces G(j*w) vs. w. Como G(j*w) es un número complejo, podemos graficar su magnitud y fase
(diagrama de Bode) o su posición en el plano complejo (diagrama de Nyquist). Se dispone de mayor información en planteo de la respuesta en frecuencia.

Concepto de Bode
Un diagrama de Bode es una representación gráfica que sirve para
caracterizar la respuesta en frecuencia de un sistema. Normalmente consta de dos
gráficas separadas, una que corresponde con la magnitud de dicha función y otra
que corresponde con la fase. Recibe su nombre del científico estadounidense que
lo desarrolló, Hendrik Wade Bode. El diagrama de magnitud de Bode dibuja el
módulo de la función de transferencia (ganancia) en decibelios en función de la
frecuencia (o la frecuencia angular) en escala logarítmica.
Se suele emplear en procesado de señal para mostrar la respuesta en
frecuencia de un sistema lineal e invariante en el tiempo Permite evaluar el
desplazamiento en fase de una señal a la salida del sistema respecto a la entrada
para una frecuencia determinada. Por ejemplo, tenemos una señal Asin (ωt) a la
entrada del sistema y asumimos que el sistema atenúa por un factor x y desplaza en
fase −Φ. En este caso, la salida del sistema será (A/x) sin(ωt − Φ). Generalmente,
este desfase es función de la frecuencia (Φ= Φ(f)); esta dependencia es lo que nos
muestra el Bode. En sistemas eléctricos esta fase deberá estar acotada entre -90° y
90°.
Si la función de transferencia es una función racional, entonces el diagrama de
Bode se puede aproximar con segmentos rectilíneos. Estas representaciones
asintóticas son útiles porque se pueden dibujar a mano siguiendo una serie de
sencillas reglas (y en algunos casos se pueden predecir incluso sin dibujar la gráfica).
Esta aproximación se puede hacer más precisa corrigiendo el valor de las frecuencias
de corte (“diagrama de Bode corregido”).
El uso de cálculo logarítmico nos va a permitir simplificar funciones del tipo
A un simple sumatorio de los logaritmos de polos y ceros:

Supongamos que la función de transferencia del sistema objeto de estudio viene dada
por la siguiente transformada de Laplace:
Donde , e son constantes.
Las normas a seguir para dibujar la aproximación del Bode son las siguientes:
En los valores de pulsación correspondientes a un cero ( ) se tiene
que aumentar la pendiente de la recta un valor de por década.
en los valores de pulsación correspondientes a un polo ( ) se tiene
que disminuir la pendiente de la recta un valor de por década.
el valor inicial se obtiene poniendo el valor de frecuencia angular inicial ω en la
función y calculando el módulo |H(jω)|.
el valor de pendiente de la función en el punto inicial depende en el número y
orden de los ceros y polos en frecuencias inferiores a la inicial; se aplican las
dos primeras reglas.
Para poder manejar polinomios irreducibles de segundo grado ( )
se puede en muchos casos aproximar dicha expresión por .
Nótese que hay ceros y polos cuando ω es igual a un determinado o . Eso
ocurre porque la función en cuestión es el módulo de H(jω), y como dicha función es
compleja,
.
Por ello, en cualquier lugar en el que haya un cero o un polo asociado a un
término , el módulo de dicho término será.
.
Trazas de Bode
Trazas de esquina o trazas asintóticas
El diagrama de Bode ha recibido también los nombres de trazas de
esquinas o trazas asintóticas ya que las trazas de Bode se pueden construir
empleando aproximaciones en línea recta que son asintóticas a la gráfica real. En
términos simples las trazas de Bode tienen las siguientes características:
1. El diagrama de bode consta de dos trazados los mismos que están
representados en función de la frecuencia en escala logarítmica.
Diagrama del logaritmo del módulo de una función de transferencia
Diagrama del ángulo de fase
2. La representación común de la magnitud logarítmica de G (jw) es 20logG (jw),
donde la base del logaritmo es 10. En la representación logarítmica se dibujan con
escala logarítmica para la frecuencia y la escala para cualquier magnitud (en
decibelios) o el ángulo de fase (en grados).
3. En los diagramas de Bode, las razones de frecuencia se expresan en términos
de octavas o décadas.
a. Una octava es una banda de frecuencia de w1 a 2 w1, donde w1 es
cualquier frecuencia.
b. Una década es una banda de frecuencia de w1 a 10 w1, donde w1 es
cualquier frecuencia.
4. Ya que la magnitud de G (jw) en las trazas de Bode se expresa en dB, los
factores de producto y división de G (jw) se vuelve adiciones y sustracciones,
respectivamente. Las relaciones de fase también son sumadas y restadas entre sí
de manera algebraica como se indicó en la propiedad de los logaritmos expuesta
al principio del ensayo.
5. La gráfica de magnitud de las trazas de Bode de G (jw) se puede aproximar
mediante segmentos de línea recta, lo que permite el simple bosquejo de las
trazas sin cálculos detallados.
6. El diagrama de Bode de una función de transferencia G(s), que contiene varios
ceros y polos, se obtiene sumando la gráfica debida a cada polo y cero
individuales. La magnitud asintótica total se puede dibujar sumando las asíntotas
debidas a cada factor. La característica de fase total, ϕ (w), se obtiene sumando la
fase debida a cada factor.
7. El diagrama de Bode de un factor de cero (1+jwτ) se obtiene de la misma forma
que para el del polo. Sin embargo, la pendiente es positiva en 20 dB/década y el
ángulo de fase es ϕ (w)=tan-1wt.
8. Ya que la aproximación en línea recta de las trazas de Bode es relativamente
fácil de construir, los datos necesarios para otras trazas en el dominio de la
frecuencia, tales como la traza polar y la traza de magnitud-fase, pueden ser
fácilmente generados a partir de las traza de Bode.
Ventajas de las trazas de Bode
En ausencia de una computadora, las trazas de Bode se pueden bosquejar
por la aproximación de magnitud y fase con segmentos de línea recta.
El cruce de ganancia, el cruce de fase, el margen de fase se determinan
más fácilmente en las trazas de Bode que en la traza de Nyquist.
Para propósitos de diseño, los efectos de añadir controladores y sus
parámetros se visualizan con mayor facilidad sobre las trazas de Bode que
sobre la traza de Nyquist.
La ventaja principal de utilizar el diagrama de Bode es que la multiplicación
de magnitudes se convierte en suma.
Cuenta con un método simple para dibujar una curva aproximada de
magnitud logarítmica

Desventajas de las trazas de Bode
La estabilidad absoluta y relativa de sistemas de fase mínima se puede
determinar desde las trazas de Bode.
No es posible dibujar las curvas hasta frecuencia cero, debido a la
frecuencia logarítmica (log 0=-∞).

Trazas de Bode
Resumiendo las trazas de bode estudiados:

Pasos para construir un diagrama de bode.
EJEMPLO: trace un diagrama de bode para la siguiente función de transferencia.
PASO N°1: Se pone G(jw) en forma normalizada, donde los factores de primer
orden y el factor de segundo orden están en línea con 0db
PASO N°2: Identificar los factores que componen la función.
Compuesta por:
PASO N°3: Hallar las Frecuencias de corte según el factor.
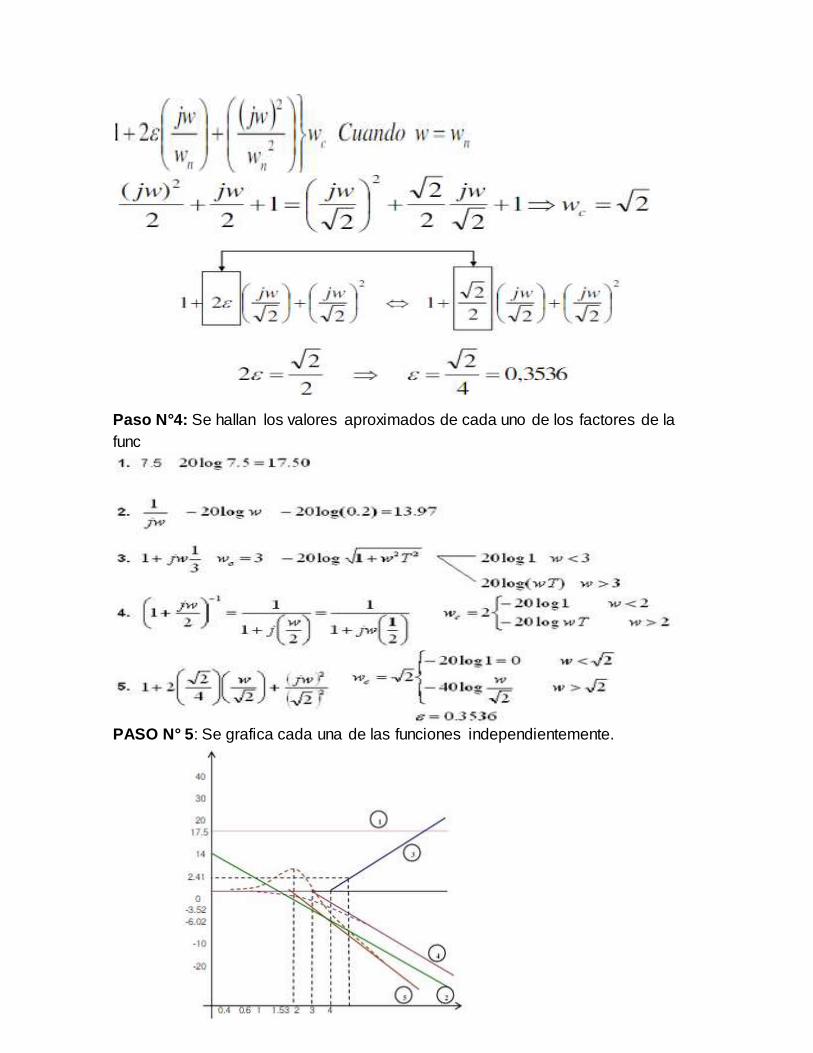
Paso N°4: Se hallan los valores aproximados de cada uno de los factores de la
func
PASO N° 5: Se grafica cada una de las funciones independientemente.

PASO N°6: La función de transferencia G(jw) resulta de la suma de las funciones
Para diagramas de ángulo de fase se procede de la misma
manera.
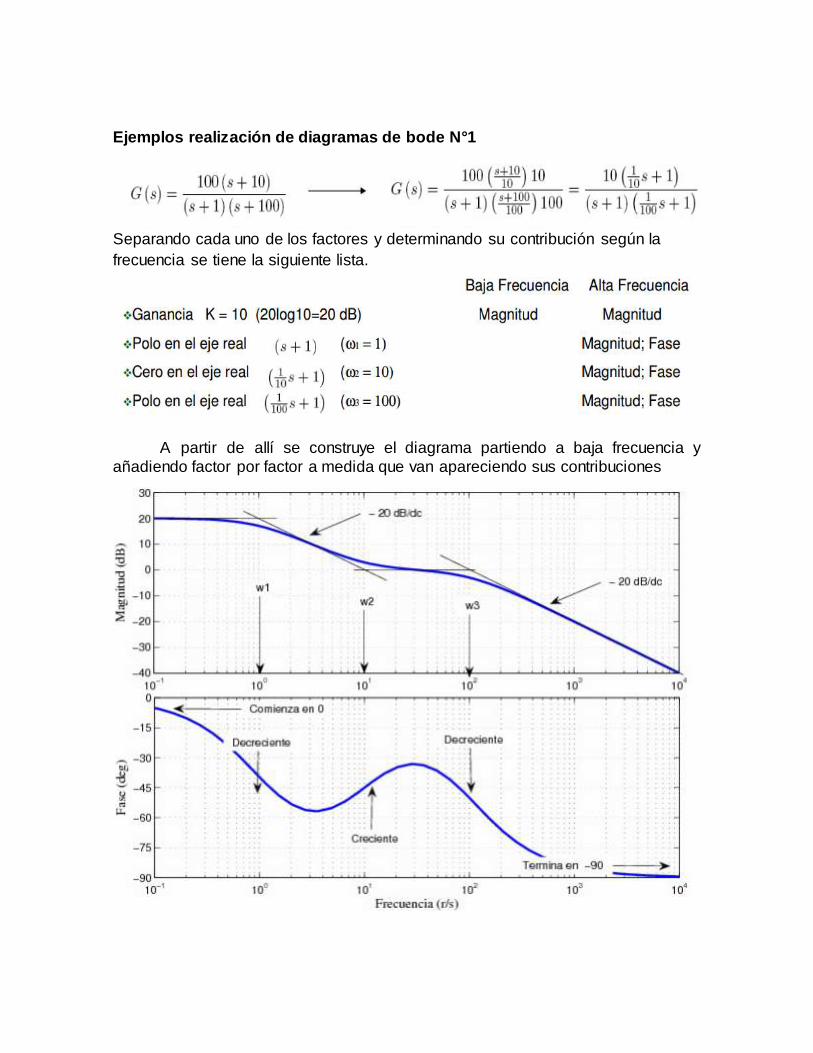
Ejemplos realización de diagramas de bode N°1
Separando cada uno de los factores y determinando su contribución según la
frecuencia se tiene la siguiente lista.
A partir de allí se construye el diagrama partiendo a baja frecuencia y
añadiendo factor por factor a medida que van apareciendo sus contribuciones

Ejemplos realización de diagramas de bode N°2
A partir de allí se construye el diagrama partiendo a baja frecuencia y añadiendo factor por factor a medida que van apareciendo sus contribuciones.

Análisis de Estabilidad utilizando el Diagrama de Bode
Sea el sencillo bucle de retroalimentación. La función de transferencia de
lazo abierto de este bucle es:
GOL = K
El criterio de estabilidad de Bode se basa en abrir el bucle e introducir una función sinusoidal para poder estudiar el comportamiento del sistema. En primer
lugar se abre el bucle y se introduce una señal sinusoidal de amplitud M y frecuencia angular ω:
ysp(t) = ε(t) = M sen ωt
Por tanto:
y(t) = KM sen ωt
Ya que,
y(s) = GOL ysp(s)
Una vez introducida la señal sinusoidal se cierra el bucle y se devuelve la consigna a su valor inicial ysp = 0. Entonces,
ε(t) = − KM sen ωt = KM sen (ωt − 180◦)
Análisis Criterio de estabilidad de Bode:
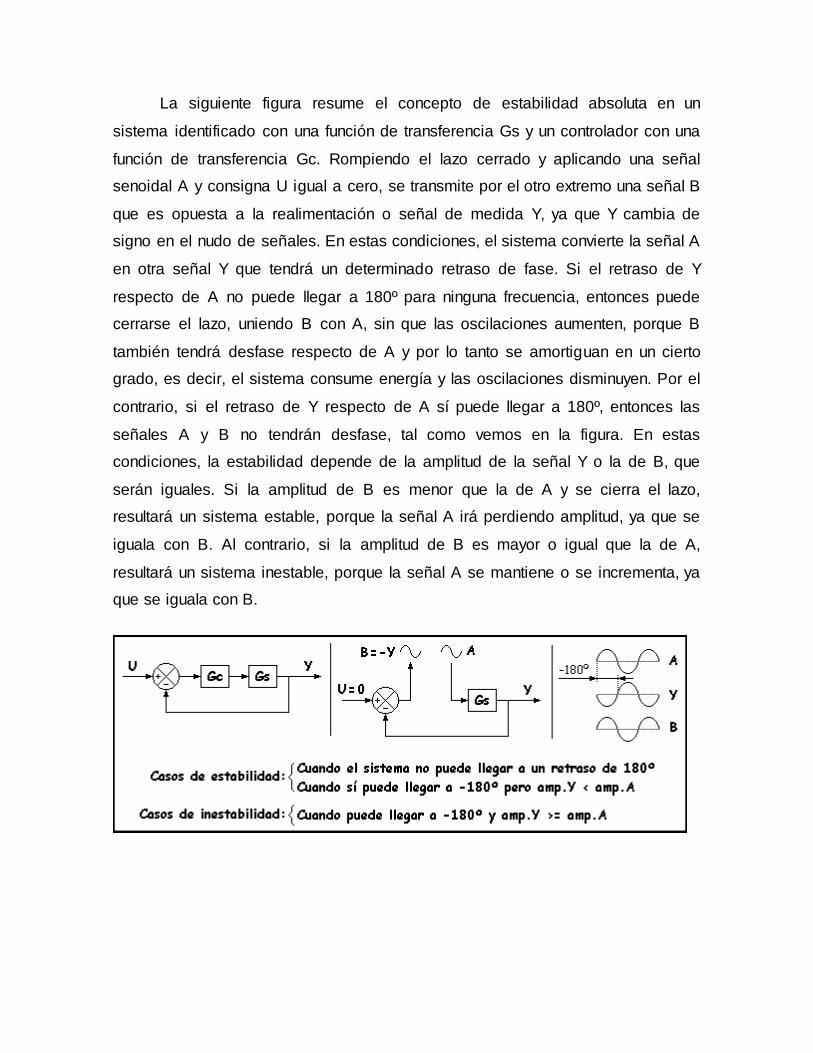
La siguiente figura resume el concepto de estabilidad absoluta en un
sistema identificado con una función de transferencia Gs y un controlador con una
función de transferencia Gc. Rompiendo el lazo cerrado y aplicando una señal
senoidal A y consigna U igual a cero, se transmite por el otro extremo una señal B
que es opuesta a la realimentación o señal de medida Y, ya que Y cambia de
signo en el nudo de señales. En estas condiciones, el sistema convierte la señal A
en otra señal Y que tendrá un determinado retraso de fase. Si el retraso de Y
respecto de A no puede llegar a 180º para ninguna frecuencia, entonces puede
cerrarse el lazo, uniendo B con A, sin que las oscilaciones aumenten, porque B
también tendrá desfase respecto de A y por lo tanto se amortiguan en un cierto
grado, es decir, el sistema consume energía y las oscilaciones disminuyen. Por el
contrario, si el retraso de Y respecto de A sí puede llegar a 180º, entonces las
señales A y B no tendrán desfase, tal como vemos en la figura. En estas
condiciones, la estabilidad depende de la amplitud de la señal Y o la de B, que
serán iguales. Si la amplitud de B es menor que la de A y se cierra el lazo,
resultará un sistema estable, porque la señal A irá perdiendo amplitud, ya que se
iguala con B. Al contrario, si la amplitud de B es mayor o igual que la de A,
resultará un sistema inestable, porque la señal A se mantiene o se incrementa, ya
que se iguala con B.
Es verdad que pueden evitarse señales con una frecuencia tal, que el
retraso no alcance los 180º, pero en la práctica no es aceptable porque toda señal
es siempre una superposición de muchas otras, llamadas armónicos, de modo que
alguna de ellas puede coincidir o acercarse demasiado a la frecuencia que lo
inestabiliza, ese armónico será amplificado por el sistema y terminará dominando
la respuesta. Tampoco ha de olvidarse la influencia de perturbaciones ajenas al
sistema.
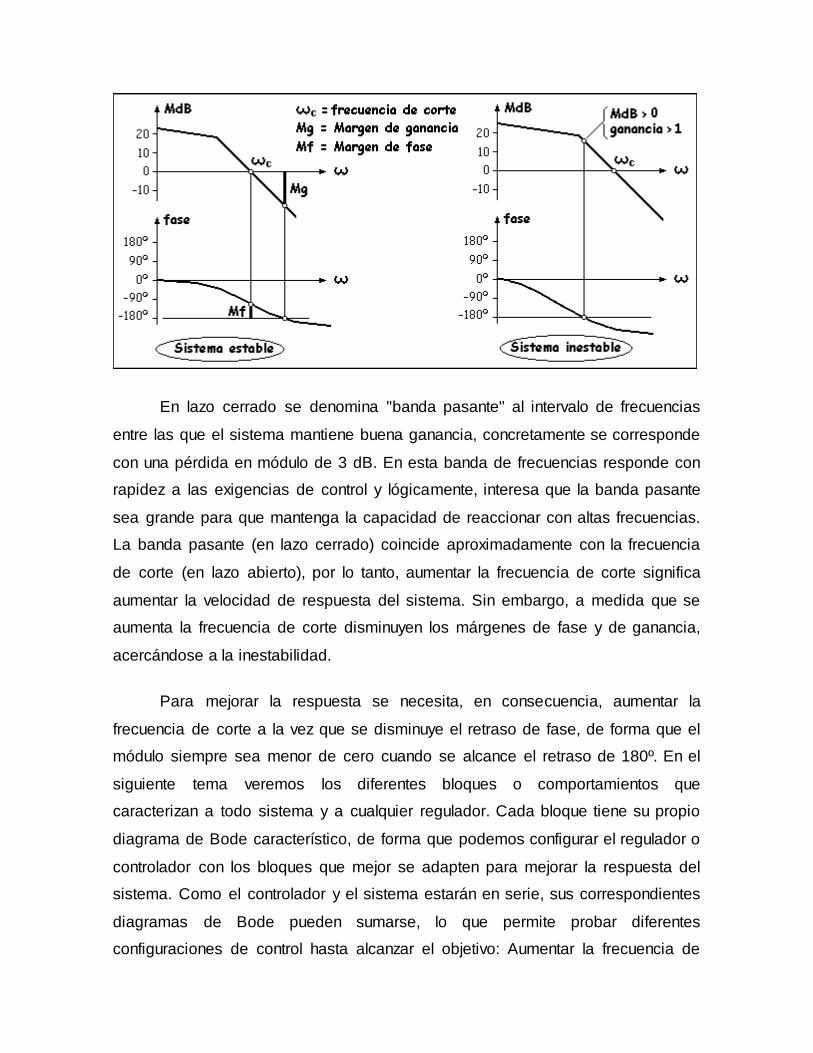
Este concepto de estabilidad absoluta solo nos dice si el sistema es estable
o no lo es, pero no nos aporta una medida de la estabilidad. Con los diagramas de
Bode también se puede determinar la estabilidad relativa como se representa en la
siguiente figura. Se conoce como frecuencia de corte (en lazo abierto) a la
frecuencia con la que se anula el módulo (expresado de decibelios), o, lo que es
igual, a la frecuencia con la que la ganancia es igual a 1, ya que el logaritmo de 1
es cero. Con frecuencias mayores a la de corte, el módulo es negativo y la
ganancia menor de 1, de modo que el sistema atenúa las oscilaciones de
frecuencias mayores a la de corte. Si el retraso de 180º se alcanza a mayor
frecuencia que la de corte, entonces el sistema es estable porque, como se acaba
de decir, la ganancia es menor de 1. El margen de fase y el margen de ganancia,
marcados en la figura, son una medida de la estabilidad relativa y miden,
respectivamente, el número de grados y el número de decibelios que faltan para
llegar a la inestabilidad. En el ejemplo representado como inestable, se observa
que con el retraso de 180º tenemos un módulo mayor que cero, por lo que la
ganancia será mayor de 1 y si se cierra el lazo (uniendo B con A como en la figura
anterior) aumentarán las oscilaciones.
En lazo cerrado se denomina "banda pasante" al intervalo de frecuencias
entre las que el sistema mantiene buena ganancia, concretamente se corresponde
con una pérdida en módulo de 3 dB. En esta banda de frecuencias responde con
rapidez a las exigencias de control y lógicamente, interesa que la banda pasante
sea grande para que mantenga la capacidad de reaccionar con altas frecuencias.
La banda pasante (en lazo cerrado) coincide aproximadamente con la frecuencia
de corte (en lazo abierto), por lo tanto, aumentar la frecuencia de corte significa
aumentar la velocidad de respuesta del sistema. Sin embargo, a medida que se
aumenta la frecuencia de corte disminuyen los márgenes de fase y de ganancia,
acercándose a la inestabilidad.
Para mejorar la respuesta se necesita, en consecuencia, aumentar la
frecuencia de corte a la vez que se disminuye el retraso de fase, de forma que el
módulo siempre sea menor de cero cuando se alcance el retraso de 180º. En el
siguiente tema veremos los diferentes bloques o comportamientos que
caracterizan a todo sistema y a cualquier regulador. Cada bloque tiene su propio
diagrama de Bode característico, de forma que podemos configurar el regulador o
controlador con los bloques que mejor se adapten para mejorar la respuesta del
sistema. Como el controlador y el sistema estarán en serie, sus correspondientes
diagramas de Bode pueden sumarse, lo que permite probar diferentes
configuraciones de control hasta alcanzar el objetivo: Aumentar la frecuencia de
corte y disminuir el retraso de fase sin que se pierda la estabilidad. Para garantizar
en la práctica un comportamiento satisfactorio, el margen de fase debe estar entre
30º y 60º y el margen de ganancia ser superior a 6 dB.