







Idiomas
Páginas
Jurídico

7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 1/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
89
UNIDAD IV
TT A ABBLLEER R OOSS “ “CCEENNTTR R OO DDEE CCOONNTTR R OOLL DDEE MMOOTTOOR R EESS” ”
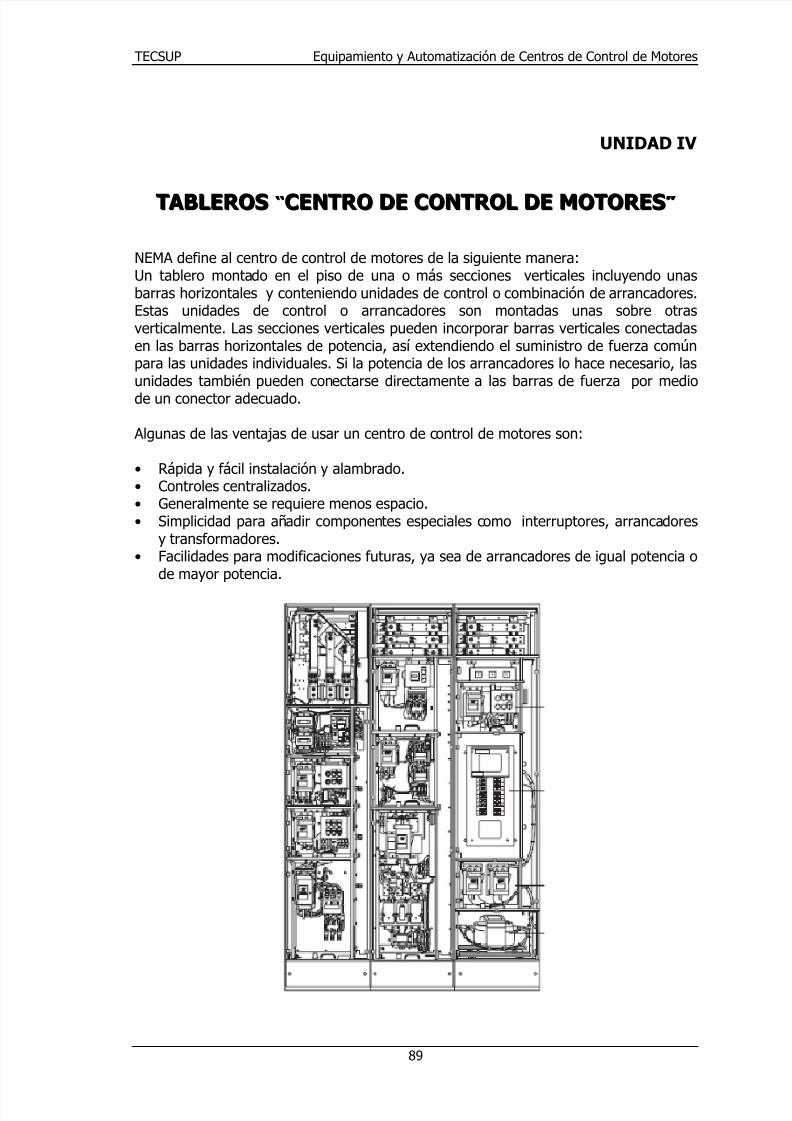
NEMA define al centro de control de motores de la siguiente manera:Un tablero montado en el piso de una o más secciones verticales incluyendo unasbarras horizontales y conteniendo unidades de control o combinación de arrancadores.Estas unidades de control o arrancadores son montadas unas sobre otrasverticalmente. Las secciones verticales pueden incorporar barras verticales conectadasen las barras horizontales de potencia, así extendiendo el suministro de fuerza comúnpara las unidades individuales. Si la potencia de los arrancadores lo hace necesario, lasunidades también pueden conectarse directamente a las barras de fuerza por medio
de un conector adecuado.
Algunas de las ventajas de usar un centro de control de motores son:
• Rápida y fácil instalación y alambrado.• Controles centralizados.• Generalmente se requiere menos espacio.• Simplicidad para añadir componentes especiales como interruptores, arrancadores
y transformadores.• Facilidades para modificaciones futuras, ya sea de arrancadores de igual potencia o
de mayor potencia.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 2/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
90
Características
Según la definición NEMA, las características de los centros de control de motores son:
• Son asambleas montadas en piso.• Tienen uno o más espacios verticales incluidos.• Tienen una barra horizontal de fuerza, puede estar en la parte superior o inferior.• Pueden incorporar barras verticales conectadas en las barras de fuerza. • Principalmente contienen unidades de control del motor de la combinación.
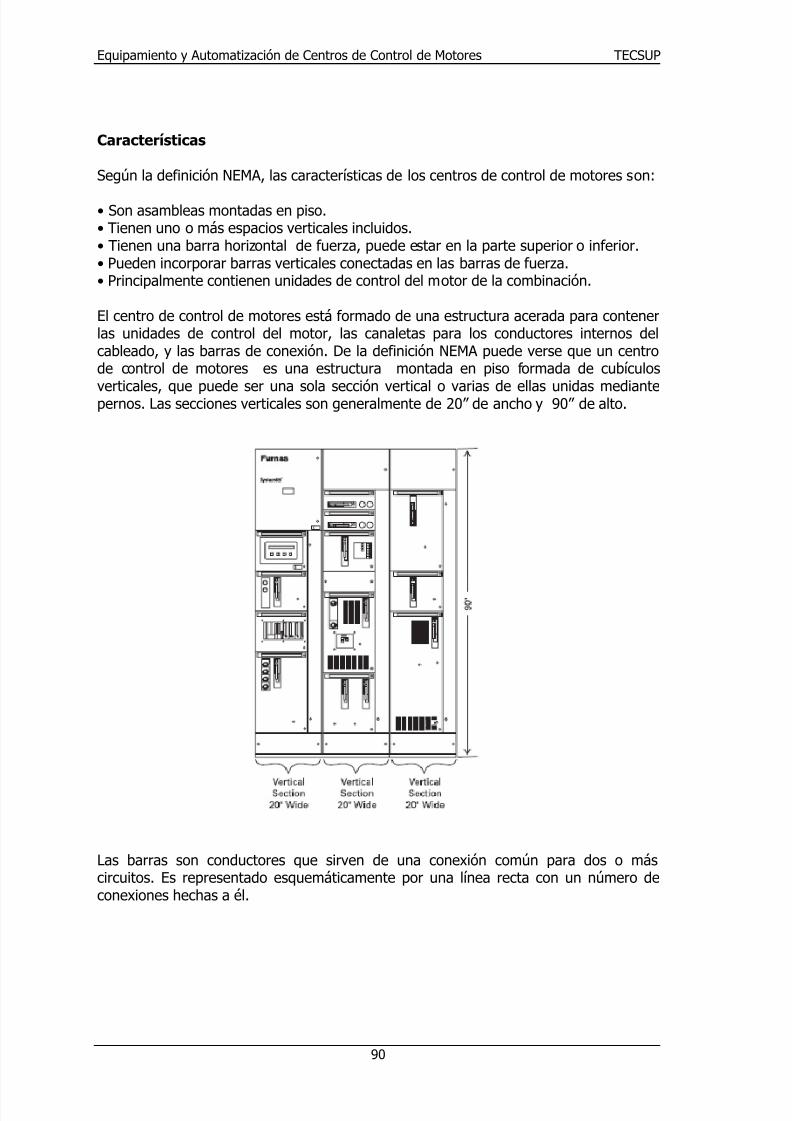
El centro de control de motores está formado de una estructura acerada para contenerlas unidades de control del motor, las canaletas para los conductores internos delcableado, y las barras de conexión. De la definición NEMA puede verse que un centrode control de motores es una estructura montada en piso formada de cubículos
verticales, que puede ser una sola sección vertical o varias de ellas unidas mediantepernos. Las secciones verticales son generalmente de 20” de ancho y 90” de alto.
Las barras son conductores que sirven de una conexión común para dos o máscircuitos. Es representado esquemáticamente por una línea recta con un número deconexiones hechas a él.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 3/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
91
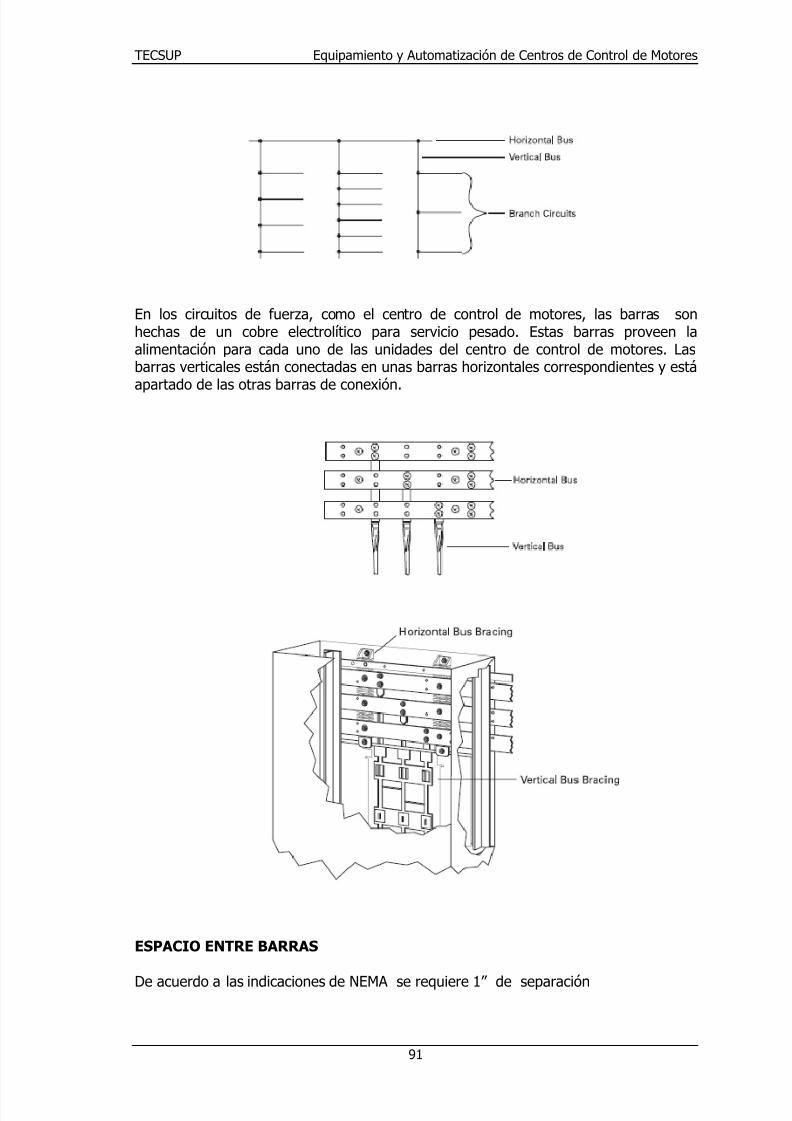
En los circuitos de fuerza, como el centro de control de motores, las barras sonhechas de un cobre electrolítico para servicio pesado. Estas barras proveen laalimentación para cada uno de las unidades del centro de control de motores. Lasbarras verticales están conectadas en unas barras horizontales correspondientes y estáapartado de las otras barras de conexión.
ESPACIO ENTRE BARRAS
De acuerdo a las indicaciones de NEMA se requiere 1” de separación
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 4/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
92
Entre las barras de potencia y tierra, 1” a través del aire entre las barras de potencia y2” a través de la superficie para tensiones superiores a 250 V, estas especificacionesson usadas para las barras verticales y las horizontales.
Enchufe y desenchufe
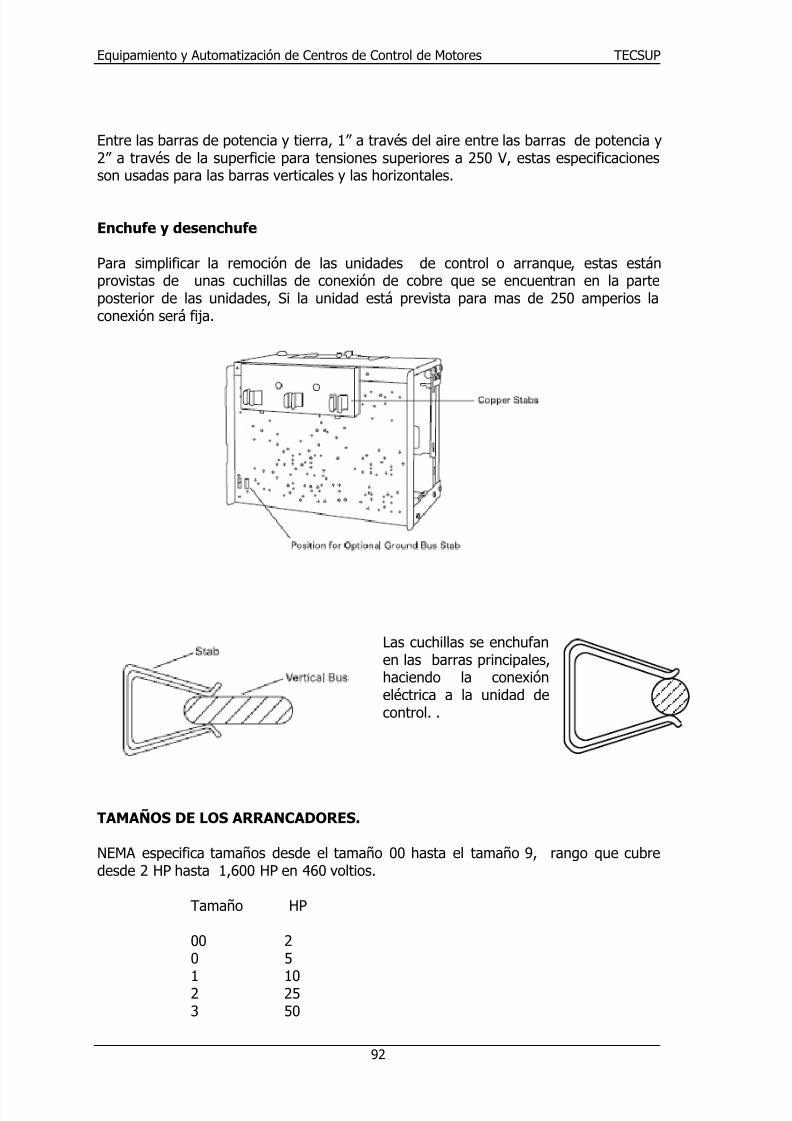
Para simplificar la remoción de las unidades de control o arranque, estas estánprovistas de unas cuchillas de conexión de cobre que se encuentran en la parteposterior de las unidades, Si la unidad está prevista para mas de 250 amperios laconexión será fija.
Las cuchillas se enchufanen las barras principales,haciendo la conexióneléctrica a la unidad decontrol. .
TAMAÑOS DE LOS ARRANCADORES.
NEMA especifica tamaños desde el tamaño 00 hasta el tamaño 9, rango que cubredesde 2 HP hasta 1,600 HP en 460 voltios.
Tamaño HP
00 20 5
1 102 253 50
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 5/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
93
4 1005 2006 400
7 6008 9009 1600
En cambio la IEC específica la potencia máxima pero no especifica las medidas, en estecaso el cliente en acuerdo con el diseñador deberá especificarlas.
Barras horizontales
Además de las especificaciones de los equipos de los arrancadores debe tenerse encuenta que los centro de control de motores deben ser usados a una tensión menor
que las especificadas para los componentes. Se debe tomar en cuenta lasrecomendaciones NEMA para la tensión de uso en las barras:Las barras horizontales en el centro de control de motores deben ser de cobra bañadaen estaño o plata en forma optativa, las tensiones comúnmente usadas son 600A,800A, 1200A, 1600A, y promedios actuales 2000A.
Las barras verticales generalmente son usadas para l 300A y 600A.
Temperatura de trabajo
NEMA limita subida de temperatura a 65 ° C, basada en una temperatura ambiental de40 ° C, para una temperatura de trabajo máxima de 105 ° C.
CLASIFICACIÓN DE ACUERDO A SU CONSTRUCCIÓN:
Lo siguiente es una descripción de la clasificación NEMA Clase 1. El centro de controlde motores clase 1 constará de agrupamientos mecánicos con unidades de control demotor, unidades de conexión a presión del alimentador, otras unidades y otrosdispositivos eléctricos ensamblados convenientemente. Incluyen conexiones de lasbarras de fuerza horizontales comunes hacia las unidades. Ellos no incluyen cableadoentre las unidades, el control a distancia o las instalaciones exteriores. Sólo seránentregarán diagramas del propio tablero.
NEMA Clase 2 ofrece el alambrado entre los cubículos o entre unidades como loespecifique el cliente.
CENTRO CONTROL DE MOTORES CLASE I
Pueden ser de construcción tipo A o B
• Tipo A — Las conexiones de fuerza y control son instaladas directamente almomento de la fabricación.• Tipo B — los bloques Terminales de control y de potencia son abastecidos para la
terminación por parte del usuario.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 6/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
94
NEMA TIPO 1.-
Las unidades y secciones son diseñadas principalmente para uso interior, proveen un
grado de protección contra contactos estando el equipo ubicado en lugares concondiciones de servicio comunes.
Los bastidores son tratados contra la corrosión.
NEMA TIPO 1.- Con sellos en las puertas, (También llamado 1G)
El tipo 1 con sellos en las puertas son provistos de sellos en todo l perímetro de laspuertas de tal manera que se puedan hermetizarlas completamente, este sellogeneralmente es de neoprene.
NEMA TIPO 3R.-
Los tableros tipo 3R, son diseñados para uso exterior previéndose principalmente ungrado de de protección contra lluvias y previéndose la formación de hielo en elexterior, no estando previstos para la formación de hielos o condensación en elinterior.
Los bastidores son tratados contra la corrosión.
NEMA TIPO 4.-
Los tableros NEMA TIPO 4 están diseñados para uso interior y exterior, proveeprotección principalmente contra ráfagas de viento, polvo, lluvia, salpicadura y chorrosdirecto de agua.
También están diseñados para no deteriorarse por la formación de hielo en el exterior.
Los bastidores están protegidos contra la corrosión.
NEMA TIPO 12.-
Los tableros NEMA TIPO 12 son diseñados para uso interior, proveen protección
principalmente contra polvo, goteo de líquidos no corrosivos.
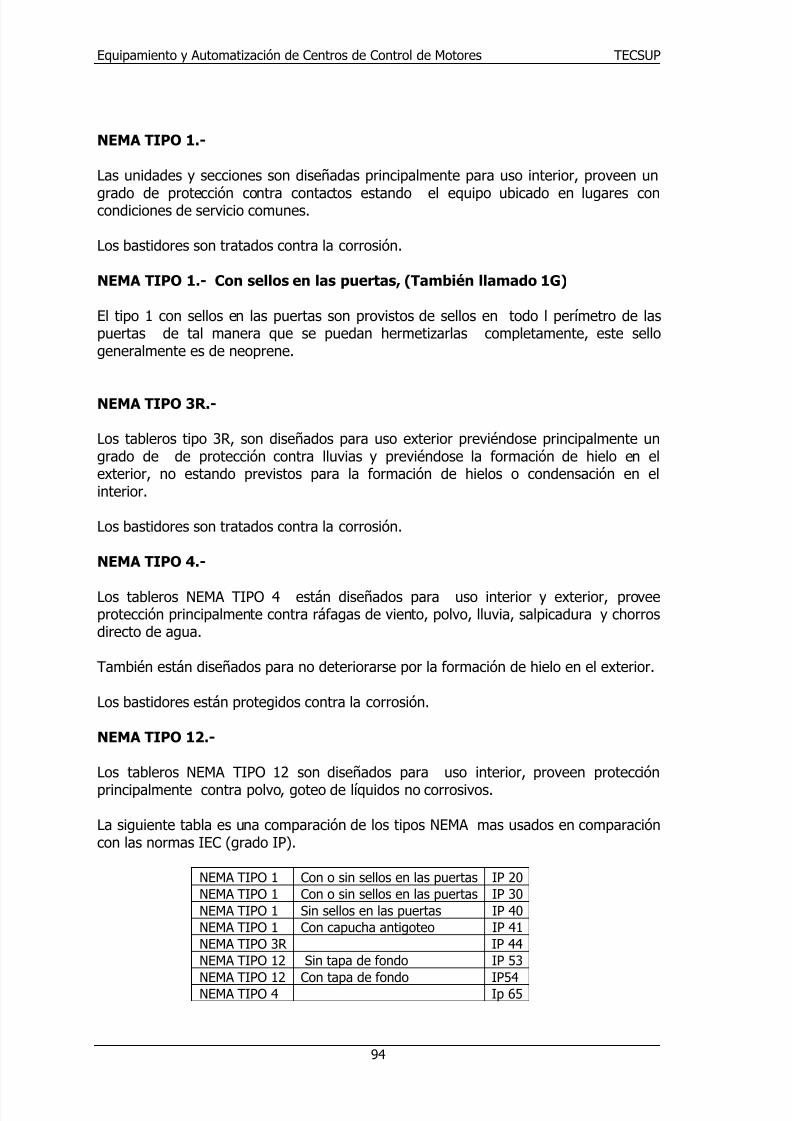
La siguiente tabla es una comparación de los tipos NEMA mas usados en comparacióncon las normas IEC (grado IP).
NEMA TIPO 1 Con o sin sellos en las puertas IP 20NEMA TIPO 1 Con o sin sellos en las puertas IP 30NEMA TIPO 1 Sin sellos en las puertas IP 40NEMA TIPO 1 Con capucha antigoteo IP 41NEMA TIPO 3R IP 44NEMA TIPO 12 Sin tapa de fondo IP 53
NEMA TIPO 12 Con tapa de fondo IP54NEMA TIPO 4 Ip 65

7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 7/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
95
CLASIFICACIÓN Y TIPOS DE ALAMBRADO
NEMA ha establecido 2 clasificaciones estándar (clase 1 y clase 2) y tres tipos de
alambrado (A, B, C) usadas en la construcción de los centro de control de motores.
Esta clasificación debe ser indicada por el cliente al momento de realizar su pedido.
Clase 1
Consiste en la combinación de contactor y relé térmico operado independientementede los otros arrancadores.
El fabricante conecta el arrancador a los terminales que se ajustan a las barras
verticales, pero no realiza el alambrado entre las unidades de arrancadores ocubículos, tampoco realiza el alambrado de los controles remotos.
Se debe suministrar al cliente los diagramas correspondientes.
Clase 1, alambrado tipo A.-
Este tipo de alambrado solo es posible realizar en los centros de control demotores clase 1.
El fabricante del centro de control de motores realiza la conexión del arrancadora las barras verticales vía los contactos de presión que se encuentran en la parteposterior del cubículo, de esta manera la tensión es aplicada al interruptor ofusibles del arrancador.
El alambrado desde el interruptor o fusibles hacia el arrancador es realizado porel fabricante.
Interruptor
Contactoralambrado por el
fabricante
El cliente realiza elalambrado al motor y
controles
Arrancador
Canaleta para
conductores
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 8/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
96
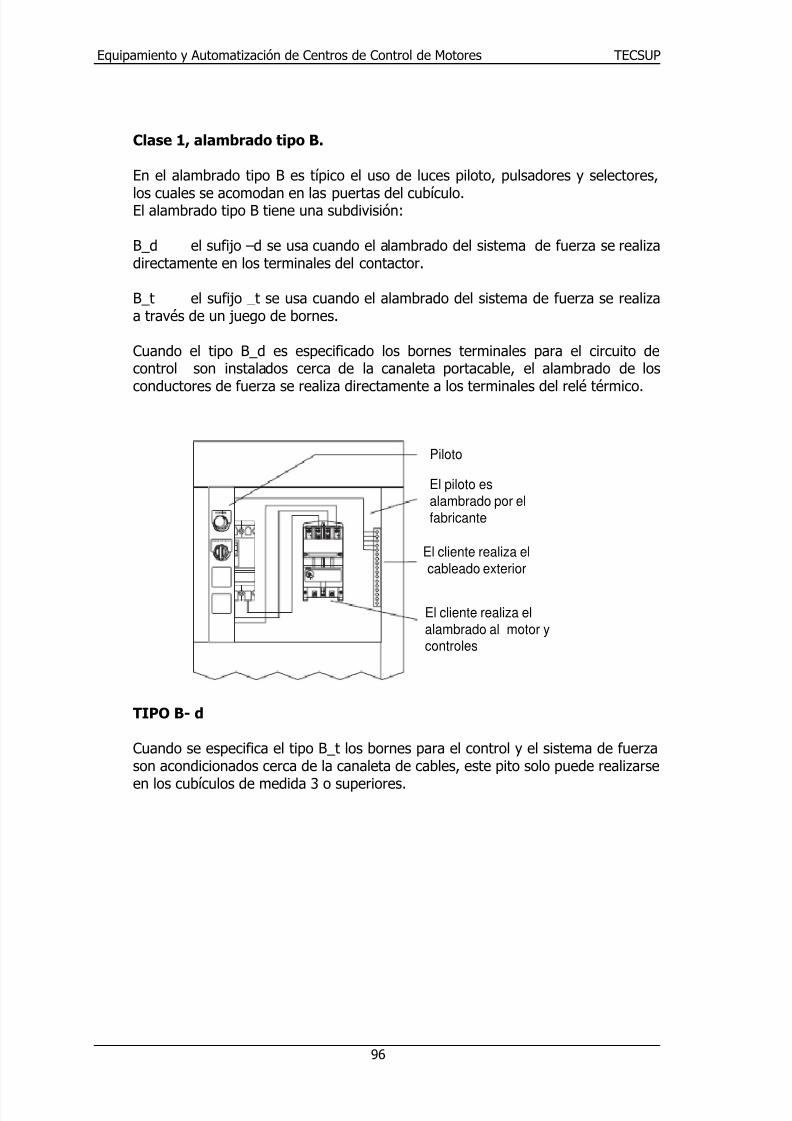
Clase 1, alambrado tipo B.
En el alambrado tipo B es típico el uso de luces piloto, pulsadores y selectores,
los cuales se acomodan en las puertas del cubículo.El alambrado tipo B tiene una subdivisión:
B_d el sufijo –d se usa cuando el alambrado del sistema de fuerza se realizadirectamente en los terminales del contactor.
B_t el sufijo _t se usa cuando el alambrado del sistema de fuerza se realizaa través de un juego de bornes.
Cuando el tipo B_d es especificado los bornes terminales para el circuito decontrol son instalados cerca de la canaleta portacable, el alambrado de los
conductores de fuerza se realiza directamente a los terminales del relé térmico.
Piloto
El piloto es
alambrado por el
fabricante
El cliente realiza el
alambrado al motor y
controles
El cliente realiza el
cableado exterior
TIPO B- d
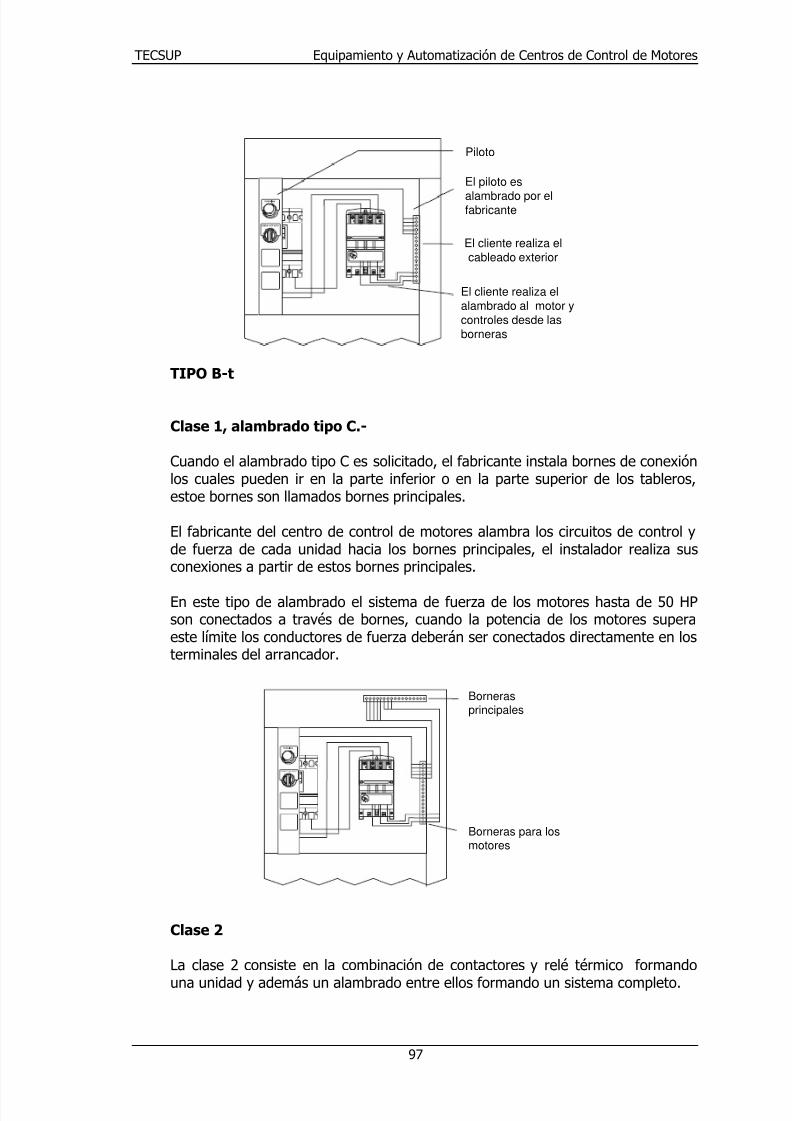
Cuando se especifica el tipo B_t los bornes para el control y el sistema de fuerzason acondicionados cerca de la canaleta de cables, este pito solo puede realizarse
en los cubículos de medida 3 o superiores.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 9/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
97
Piloto
El piloto es
alambrado por elfabricante
El cliente realiza elalambrado al motor ycontroles desde lasborneras
El cliente realiza elcableado exterior
TIPO B-t
Clase 1, alambrado tipo C.-
Cuando el alambrado tipo C es solicitado, el fabricante instala bornes de conexiónlos cuales pueden ir en la parte inferior o en la parte superior de los tableros,estoe bornes son llamados bornes principales.
El fabricante del centro de control de motores alambra los circuitos de control yde fuerza de cada unidad hacia los bornes principales, el instalador realiza susconexiones a partir de estos bornes principales.
En este tipo de alambrado el sistema de fuerza de los motores hasta de 50 HPson conectados a través de bornes, cuando la potencia de los motores superaeste límite los conductores de fuerza deberán ser conectados directamente en losterminales del arrancador.
Bornerasprincipales
Borneras para losmotores
Clase 2
La clase 2 consiste en la combinación de contactores y relé térmico formando
una unidad y además un alambrado entre ellos formando un sistema completo.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 10/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
98
La clase 2 es especificada generalmente cuando se necesita que los motoresfuncionen mediante una secuencia pre establecida o con enclavamiento.Los diagramas que proporcione el fabricante deberán especificar estas
interconexiones.
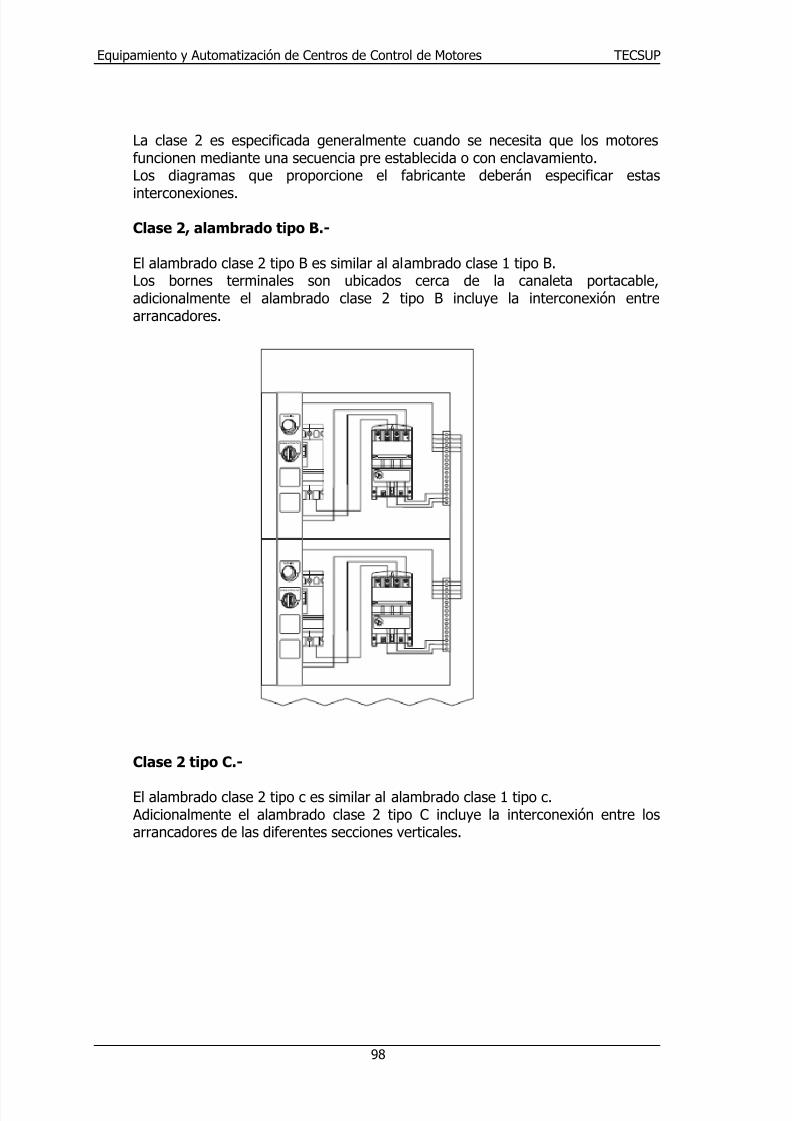
Clase 2, alambrado tipo B.-
El alambrado clase 2 tipo B es similar al alambrado clase 1 tipo B.Los bornes terminales son ubicados cerca de la canaleta portacable,adicionalmente el alambrado clase 2 tipo B incluye la interconexión entrearrancadores.
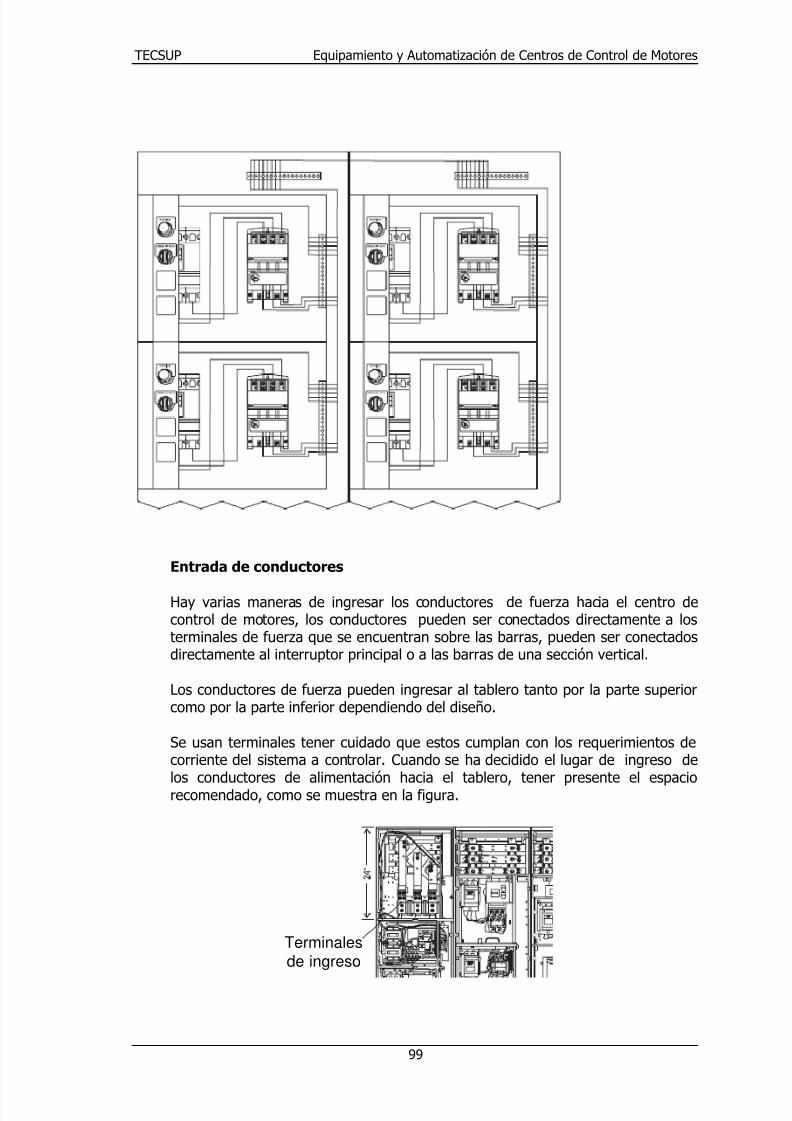
Clase 2 tipo C.-
El alambrado clase 2 tipo c es similar al alambrado clase 1 tipo c. Adicionalmente el alambrado clase 2 tipo C incluye la interconexión entre losarrancadores de las diferentes secciones verticales.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 11/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
99
Entrada de conductores
Hay varias maneras de ingresar los conductores de fuerza hacia el centro decontrol de motores, los conductores pueden ser conectados directamente a losterminales de fuerza que se encuentran sobre las barras, pueden ser conectadosdirectamente al interruptor principal o a las barras de una sección vertical.
Los conductores de fuerza pueden ingresar al tablero tanto por la parte superiorcomo por la parte inferior dependiendo del diseño.
Se usan terminales tener cuidado que estos cumplan con los requerimientos decorriente del sistema a controlar. Cuando se ha decidido el lugar de ingreso delos conductores de alimentación hacia el tablero, tener presente el espaciorecomendado, como se muestra en la figura.
Terminalesde ingreso
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 12/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
100
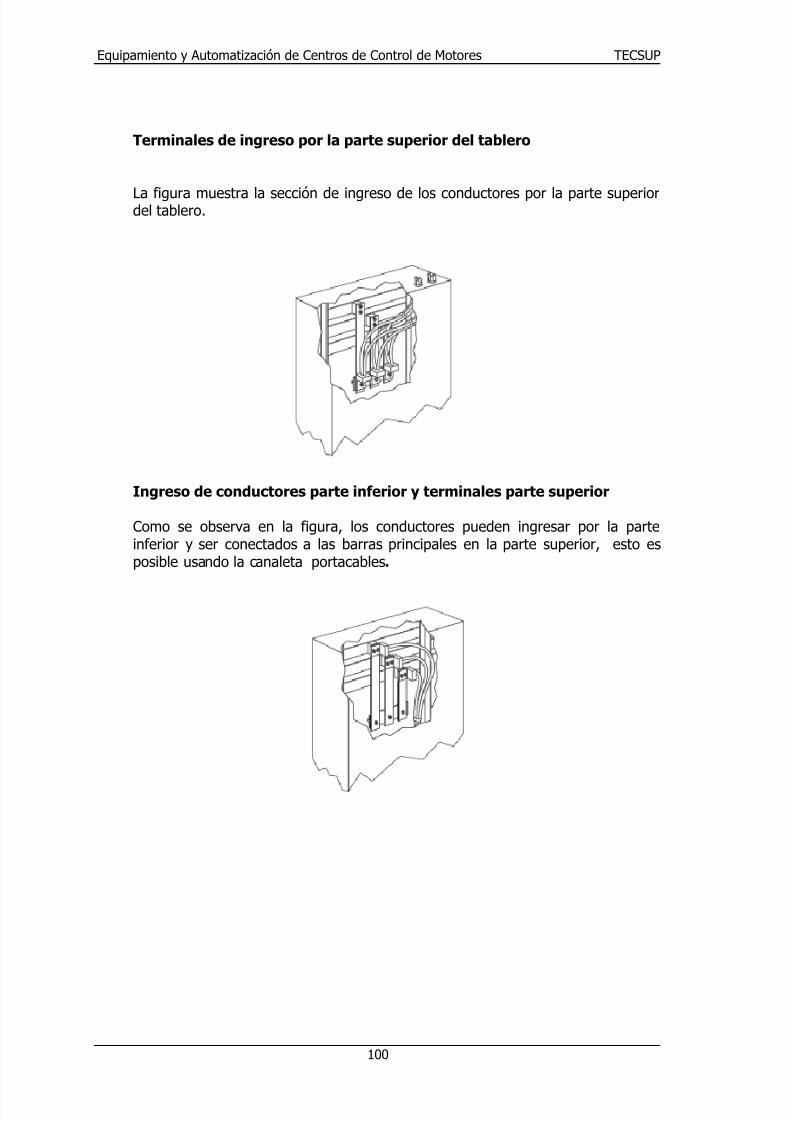
Terminales de ingreso por la parte superior del tablero
La figura muestra la sección de ingreso de los conductores por la parte superiordel tablero.
Ingreso de conductores parte inferior y terminales parte superior
Como se observa en la figura, los conductores pueden ingresar por la parteinferior y ser conectados a las barras principales en la parte superior, esto esposible usando la canaleta portacables.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 13/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
101
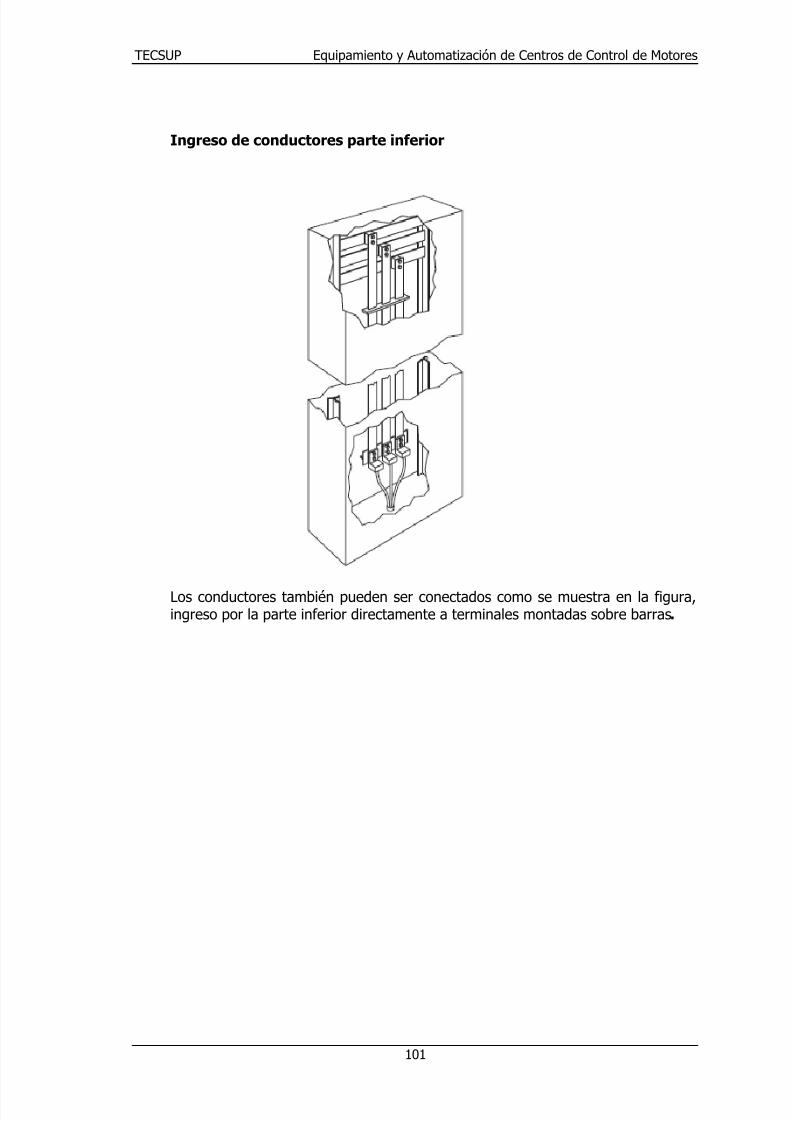
Ingreso de conductores parte inferior
Los conductores también pueden ser conectados como se muestra en la figura,ingreso por la parte inferior directamente a terminales montadas sobre barras.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 14/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
102
Anotaciones:
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________________
______________________________________________________________
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 15/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
1
DESCRIPCIÓN SÍMBOLON*
7
8
9
10
11
12
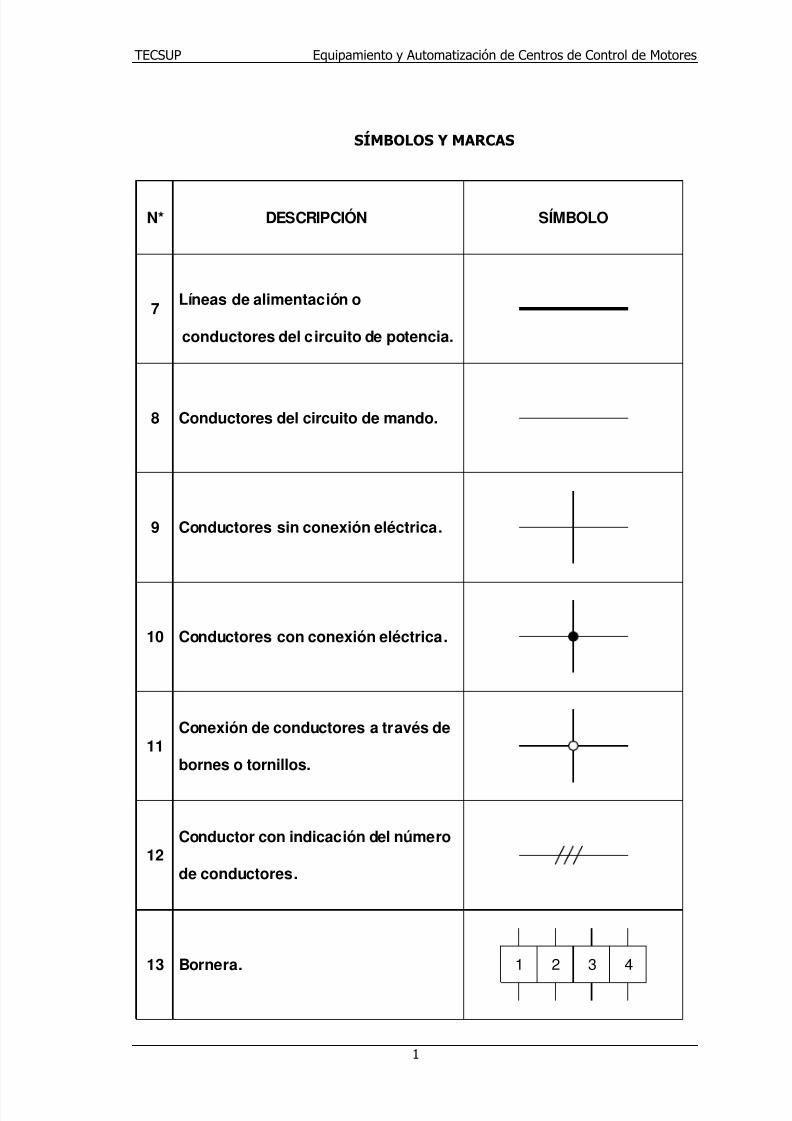
Líneas de alimentación o
conductores del circuito de potencia.
Conductores del circuito de mando.
Conductores sin conexión eléctrica.
Conexión de conductores a través de
bornes o tornillos.
Conductor con indicación del número
de conductores.
Conductores con conexión eléctrica.
13 Bornera. 1 2 3 4
SÍMBOLOS Y MARCAS
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 16/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
2
DESCRIPCIÓN SÍMBOLON*
14
15
16
17
18
19
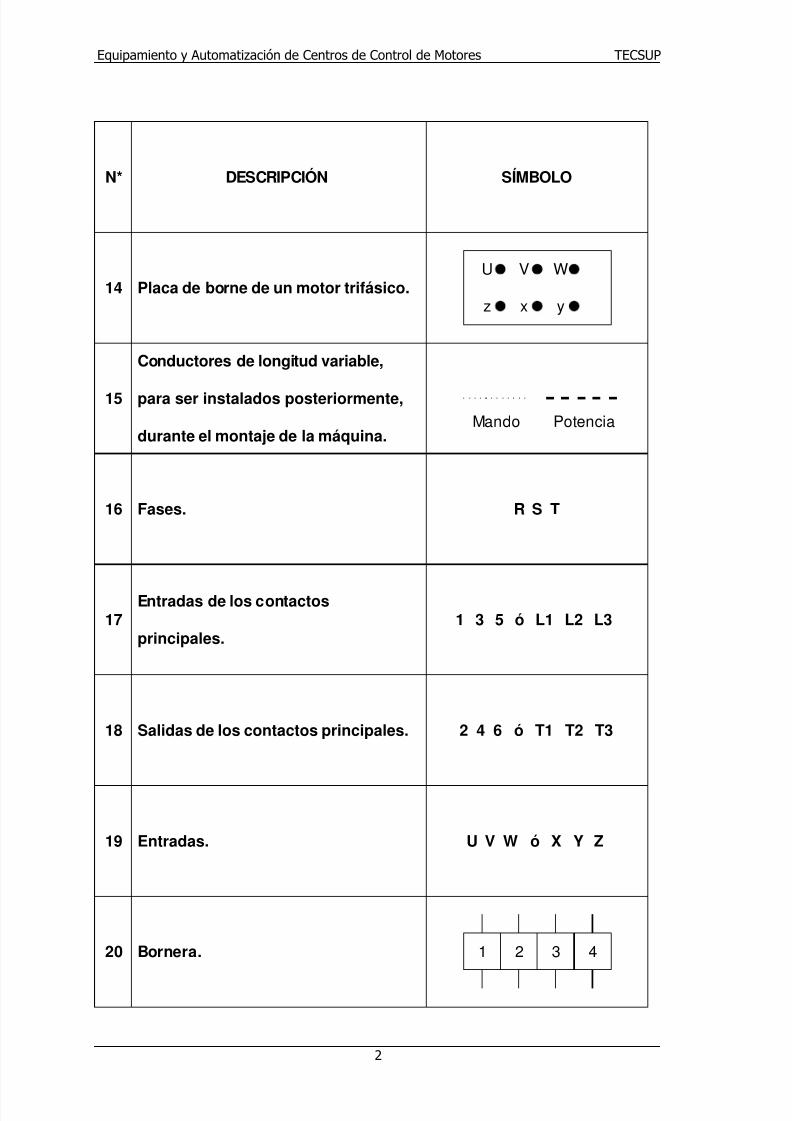
Placa de borne de un motor trifásico.
Conductores de longitud variable,
para ser instalados posteriormente,
durante el montaje de la máquina.
Fases.
Salidas de los contactos principales.
Entradas.
Entradas de los contactos
principales.
20 Bornera. 1 2 3 4
U V W
z x y
Mando Potencia
R S T
1 3 5 ó L1 L2 L3
2 4 6 ó T1 T2 T3
U V W ó X Y Z
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 17/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
3
DESCRIPCIÓN SÍMBOLON*
21
22
23
24
25
26
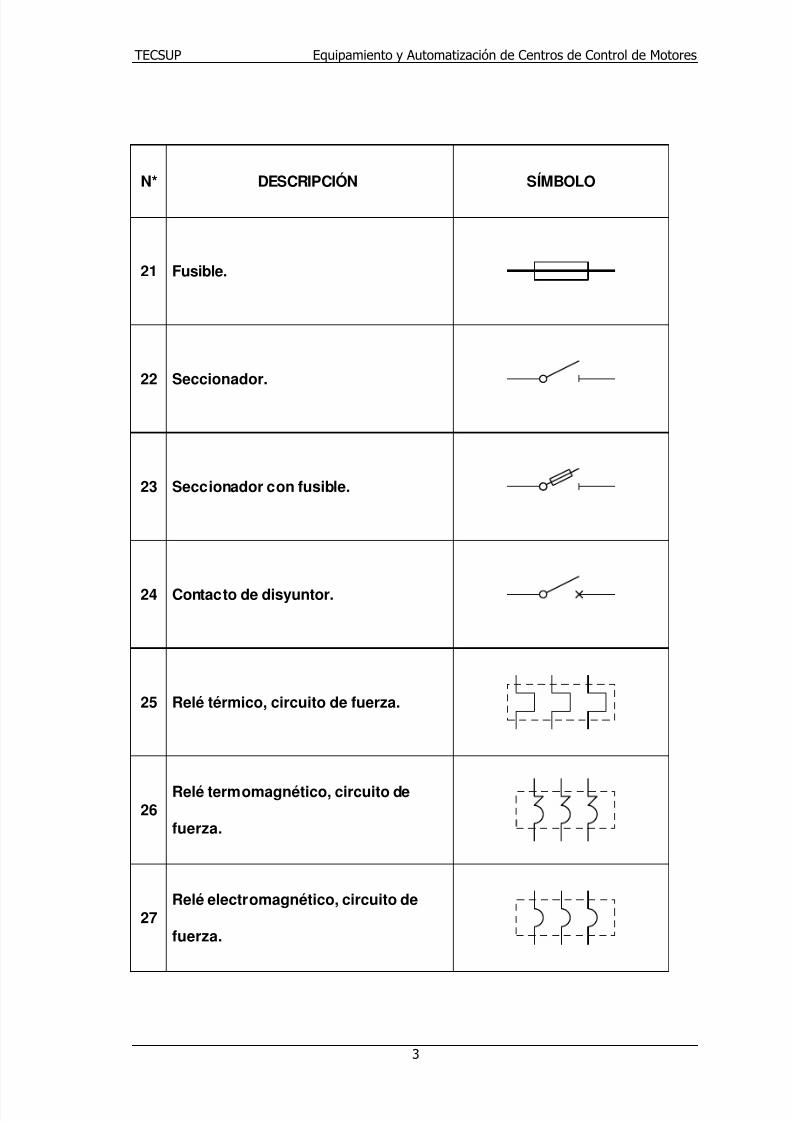
Fusible.
Seccionador.
Seccionador con fusible.
Relé térmico, circuito de fuerza.
Relé termomagnético, circuito de
fuerza.
Contacto de disyuntor.
27Relé electromagnético, circuito de
fuerza.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 18/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
4
DESCRIPCIÓN SÍMBOLON*
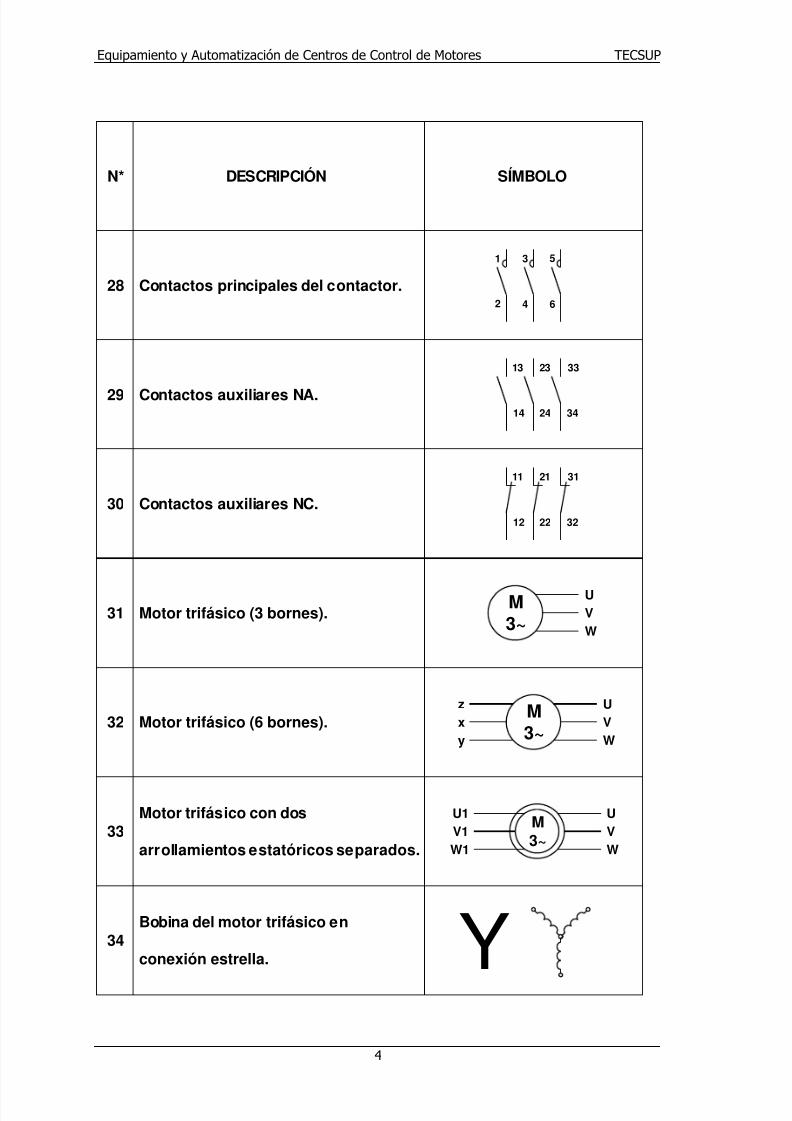
28
29
30
31
32
33
Contactos principales del contactor.
Contactos auxiliares NA.
Contactos auxiliares NC.
Motor trifásico (6 bornes).
Motor trifásico con dos
arrollamientos estatóricos separados.
Motor trifásico (3 bornes).
34Bobina del motor trifásico en
conexión estrella.
1 3 5
2 4 6
14
13 23
24
33
34
12
11 21
22
31
32
M3~
UVW
M3~
UVW
zxy
M3~
UVW
U1V1W1
Y
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 19/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
5
DESCRIPCIÓN SÍMBOLON*
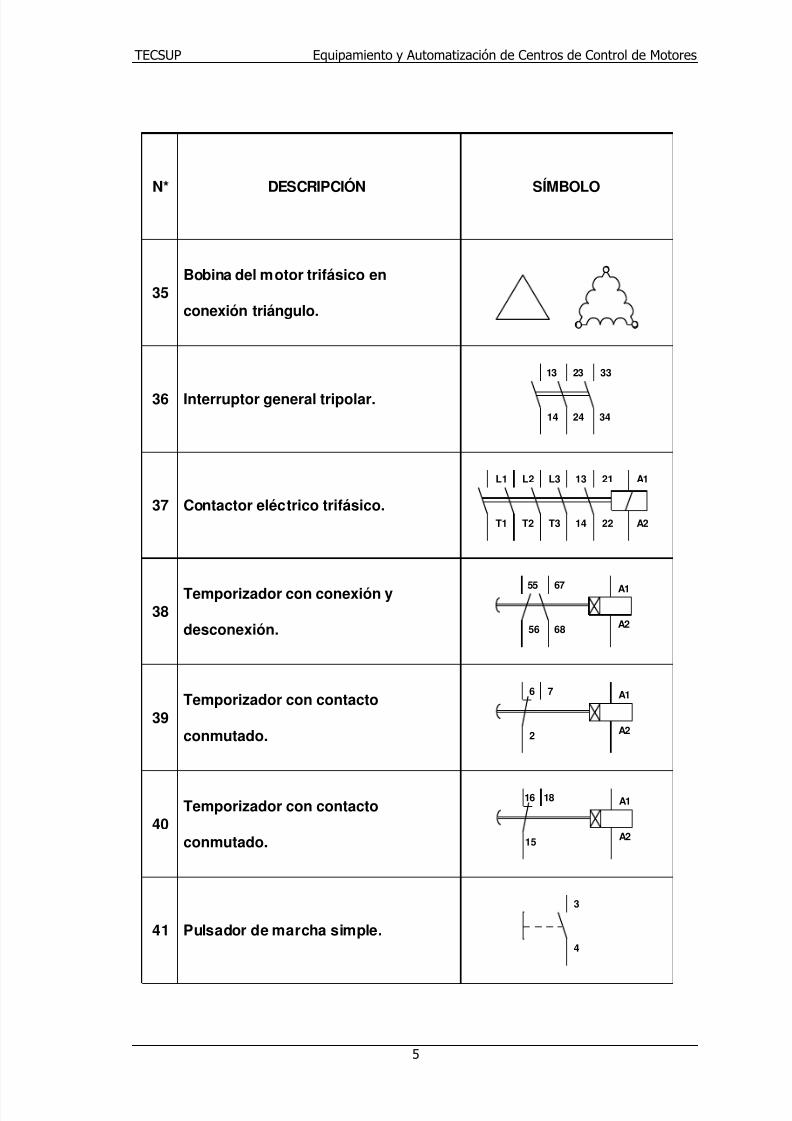
35
36
37
38
39
40
Interruptor general tripolar.
Contactor eléctrico trifásico.
Temporizador con contacto
conmutado.
Temporizador con conexión y
desconexión.
41 Pulsador de marcha simple.
14
13 23
24
33
34
Bobina del motor trifásico en
conexión triángulo.
T1
L1 L2
T2
L3
T3
13
14
21
22
A1
A2
56
55 67
68 A2
A1
2
6 7
A2
A1
Temporizador con contacto
conmutado. 15
16 18
A2
A1
3
4
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 20/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
6
DESCRIPCIÓN SÍMBOLON*
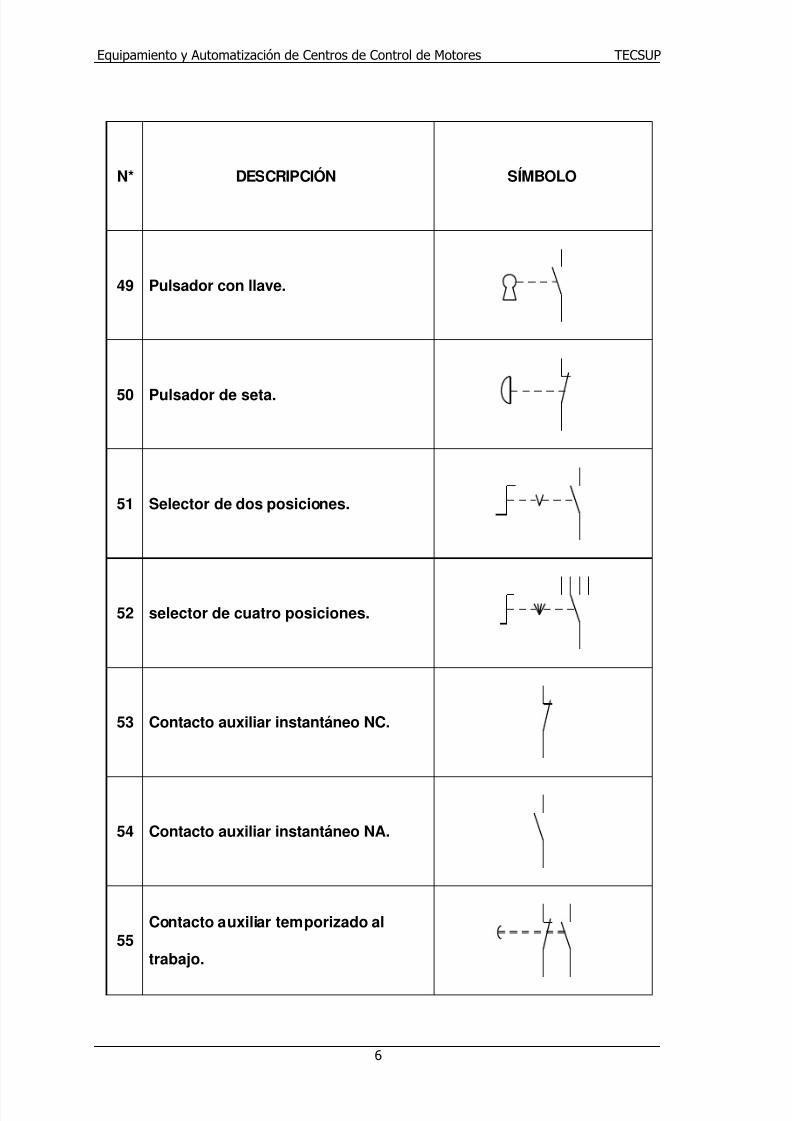
49
50
51
52
53
54
Pulsador de seta.
55Contacto auxiliar temporizado al
trabajo.
Pulsador con llave.
Selector de dos posiciones.
selector de cuatro posiciones.
Contacto auxiliar instantáneo NC.
Contacto auxiliar instantáneo NA.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 21/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
7
DESCRIPCIÓN SÍMBOLON*
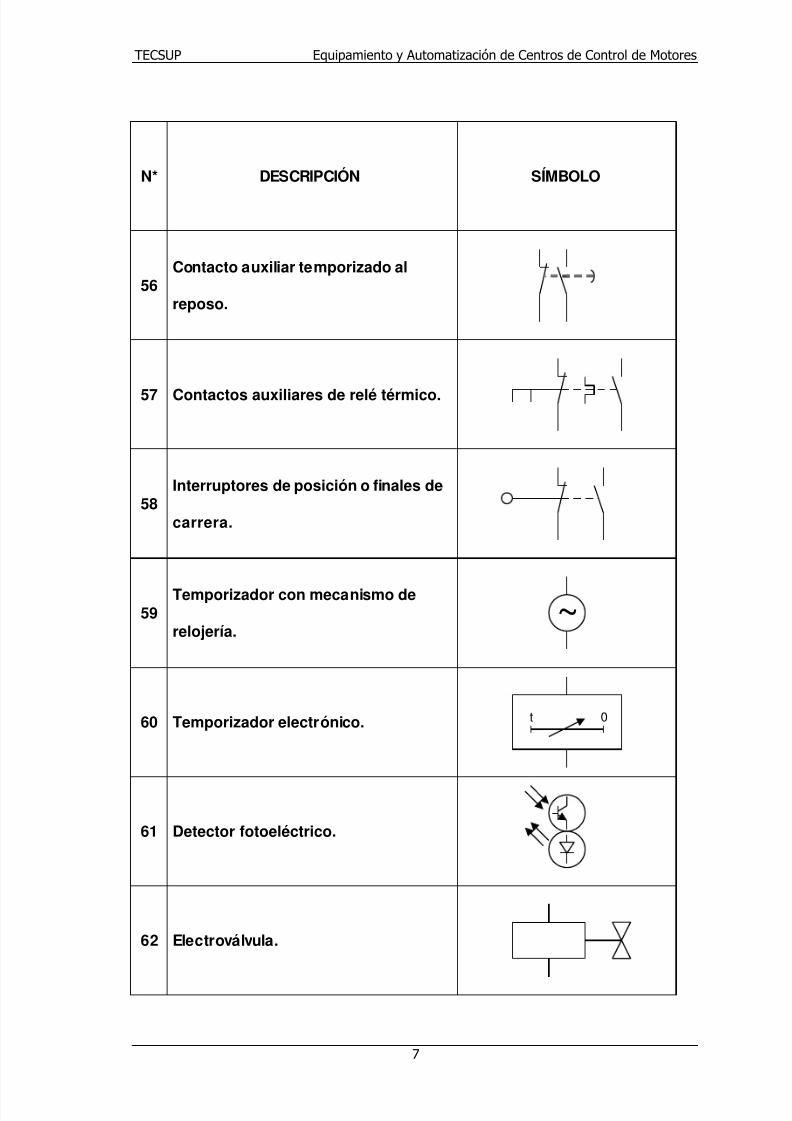
56
57
58
59
60
61
Contactos auxiliares de relé térmico.
62 Electroválvula.
Contacto auxiliar temporizado al
reposo.
Interruptores de posición o finales de
carrera.
Temporizador con mecanismo de
relojería.
Temporizador electrónico.
Detector fotoeléctrico.
~
t 0
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 22/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
8
DESCRIPCIÓN SÍMBOLON*
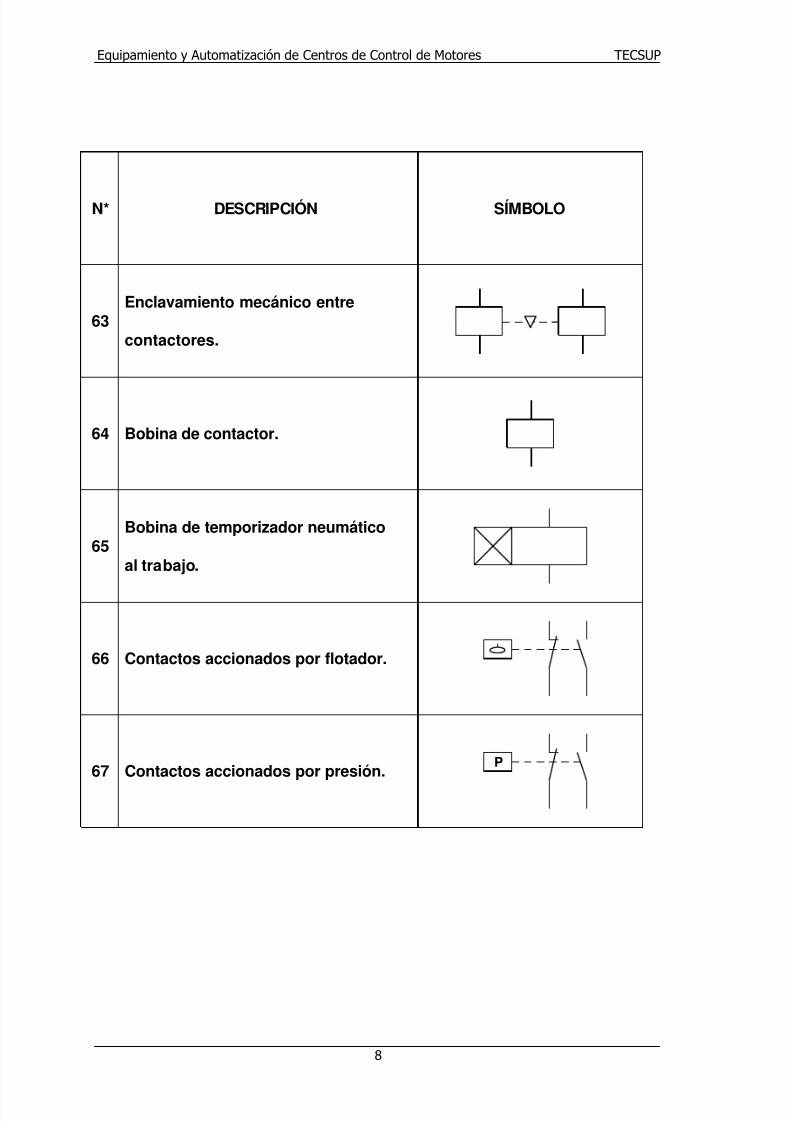
63
64
65
66
67
Bobina de contactor.
Enclavamiento mecánico entre
contactores.
Bobina de temporizador neumático
al trabajo.
Contactos accionados por flotador.
Contactos accionados por presión.P
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 23/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
9
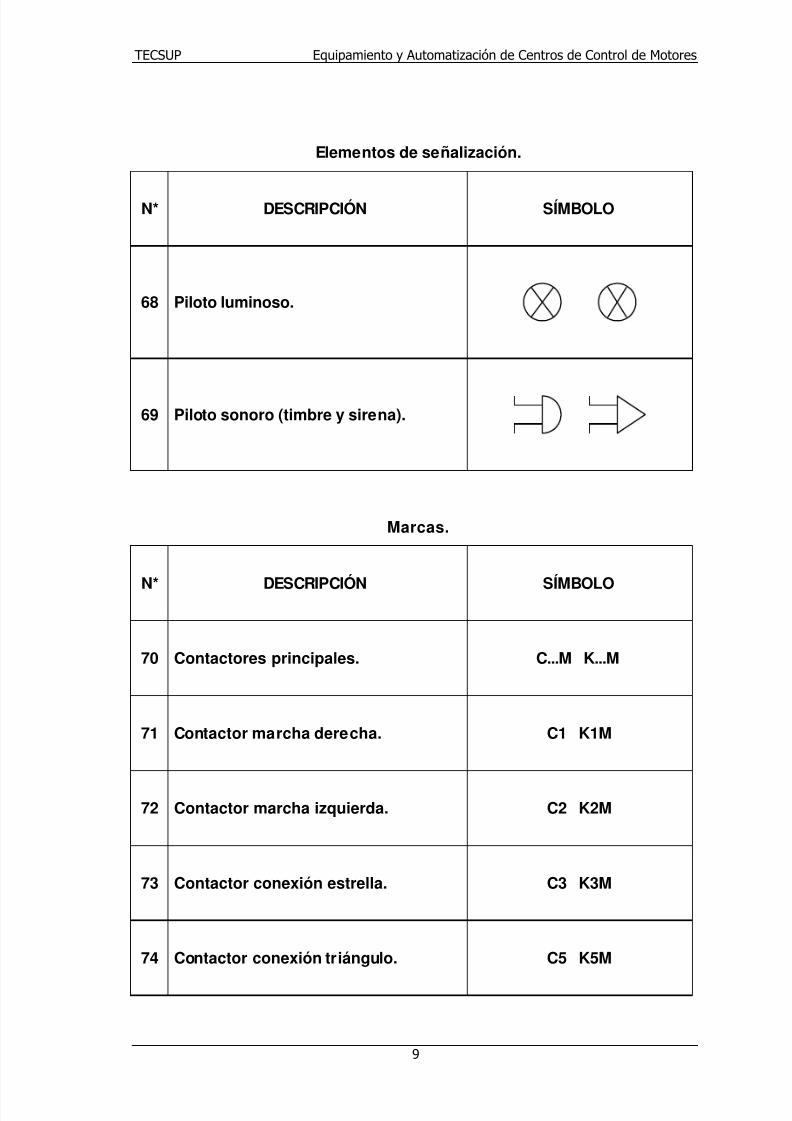
Elementos de señalización.
DESCRIPCIÓN SÍMBOLON*
68
69
Piloto luminoso.
Piloto sonoro (timbre y sirena).
Marcas.
DESCRIPCIÓN SÍMBOLON*
70
71
72
73
74
Contactor marcha derecha.
Contactores principales.
Contactor marcha izquierda.
Contactor conexión estrella.
Contactor conexión triángulo.
C...M K...M
C1 K1M
C2 K2M
C3 K3M
C5 K5M
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 24/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
10
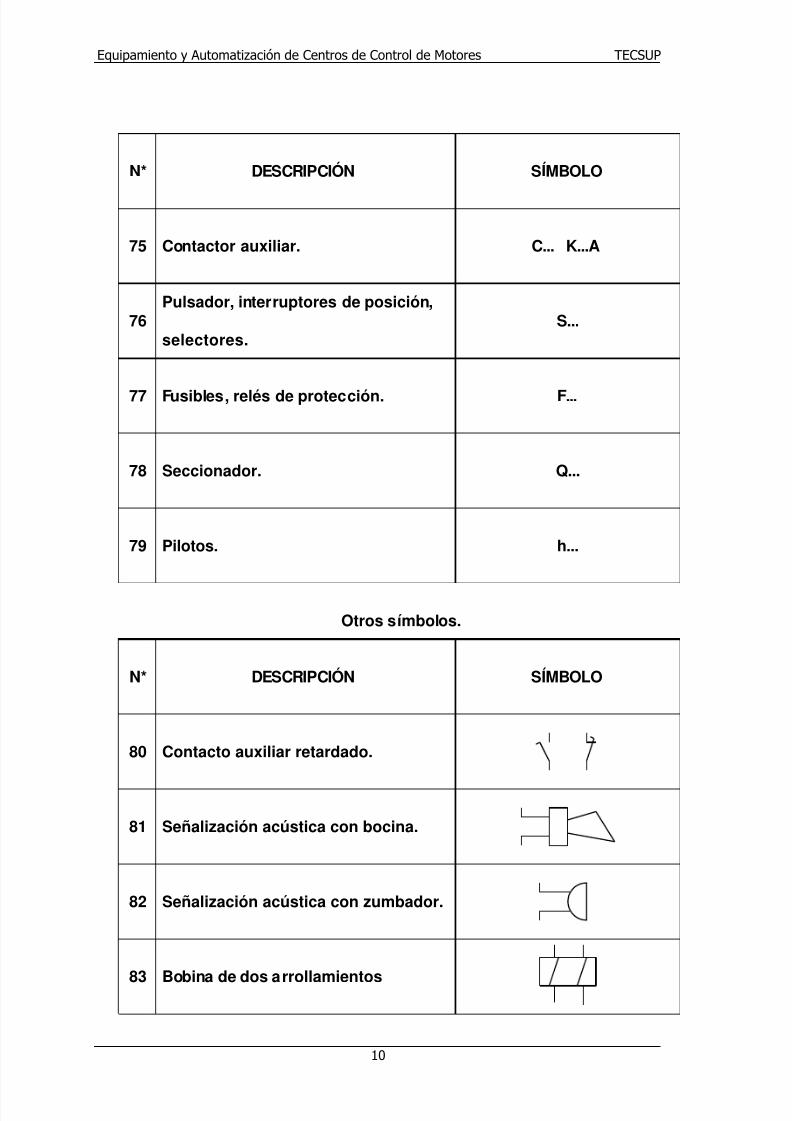
DESCRIPCIÓN SÍMBOLON*
75
76
77
78
79
Pulsador, interruptores de posición,
selectores.
Contactor auxiliar.
Fusibles, relés de protección.
Seccionador.
Pilotos.
C... K...A
S...
F...
Q...
h...
Otros símbolos.
DESCRIPCIÓN SÍMBOLON*
80
81
82
83
Señalización acústica con bocina.
Contacto auxiliar retardado.
Señalización acústica con zumbador.
Bobina de dos arrollamientos
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 25/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
11
NORMAS ELECTROTÉCNICAS
NORMA
Es un documento que simplifica, especifica, unifica un material, un producto, unensayo, una unidad, una tecnología. Un documento que debe reunir un conjuntode propiedades intrínsecas para que su aceptación y utilización sea fácil ysegura. Algo que, en síntesis, facilita la vida, estableciendo soluciones óptimas atodos los problemas que se repiten.
Dentro de los esquemas de circuitos eléctricos, un aspecto muy importante delas normas es el de conseguir dar una información suficiente, clara, sencilla, decriterios constantes y contrastada por personas competentes y responsables, quepermita un rápido intercambio de información obteniendo una comprensión
unívoca de concepto y terminología.
Para llevar a buen puerto una actividad los técnicos se sirven entre otras cosas,de la información que les facilitan las normas que se publican por diversosorganismos a nivel nacional e internacional, normas y organismos cuyaproliferación es amplísima y cada vez con mayor exigencia de rigor.
PRINCIPALES NORMAS ELECTROTÉCNICAS
A continuación se indica las normas electrotécnicas más importantes
AEE Asociación Electrotécnica Española ANSI Instituto de normalización nacional de U.S.A
BS Prescripciones británicasCENELEC Comité europeo para la normalización electrotécnica.
DIN Normas alemanas para la industria IEC Comisión electrotécnica internacionalJIS Prescripciones japonesas
NEMA Asociación de fabricantes de productos eléctricos U.S.A.UNE Una norma españolaUTE Asociación electrotécnica francesa
VDE Asociación electrotécnica alemanaCNE Código Nacional de Electricidad(Perú)
Con la normalización de símbolos empleados en Electrotecnia se crea un nuevosistema de comunicación que constituye un idioma gráfico a nivel nacional e
internacional.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 26/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
12
Para facilitar el estudio del lector hemos recopilado en una serie de tablas losgrupos de símbolos literales y gráficos que se utilizan en Electrotecnia en generaly en automatización eléctrica en particular.
En cada tabla hemos dibujado los símbolos según las normas IEC, DIN, ANSI, yse les ha dado el significado unívoco mediante una definición concreta y lo másclara posible. (Tablas 2.2).
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 27/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
13
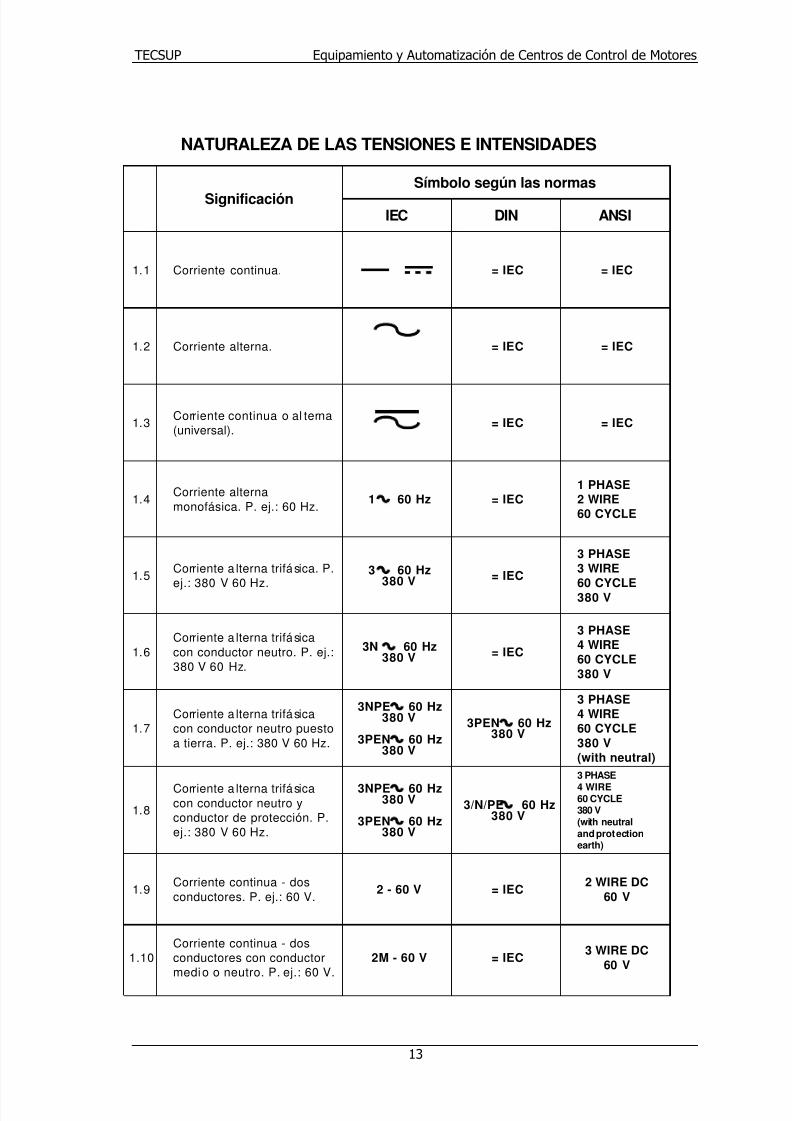
Corriente continua.
Corriente alterna.
Corriente continua o al terna
(universal).
Corriente alterna
monofásica. P. ej.: 60 Hz.
Corriente continua - dos
conductores. P. ej.: 60 V.
Corriente a lterna trifásica. P.
ej.: 380 V 60 Hz.
Corriente a lterna trifásica
con conductor neutro. P. ej.:
380 V 60 Hz.
Corriente a lterna trifásica
con conductor neutro puesto
a tierra. P. ej.: 380 V 60 Hz.
Corriente a lterna trifásicacon conductor neutro y
conductor de protección. P.
ej.: 380 V 60 Hz.
Corriente continua - dos
conductores con conductor
medio o neutro. P. ej.: 60 V.
Significación
Símbolo según las normas
IEC DIN ANSI
1 60 Hz
3 60 Hz
3N 60 Hz
3NPE 60 Hz
380 V
380 V
380 V
3PEN 60 Hz380 V
3NPE 60 Hz380 V
3PEN 60 Hz
2 - 60 V
2M - 60 V
380 V
= IEC
= IEC
1 PHASE2 WIRE60 CYCLE
3 PHASE3 WIRE
60 CYCLE380 V
3 PHASE4 WIRE60 CYCLE380 V(with neutral)
3 WIRE DC60 V
2 WIRE DC60 V
NATURALEZA DE LAS TENSIONES E INTENSIDADES
3 PHASE
4 WIRE60 CYCLE380 V(with neutraland protectionearth)
3 PHASE4 WIRE60 CYCLE380 V
3PEN 60 Hz380 V
3/N/PE 60 Hz380 V
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
= IEC
= IEC = IEC
= IEC = IEC
= IEC
= IEC
= IEC
= IEC
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 28/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
14
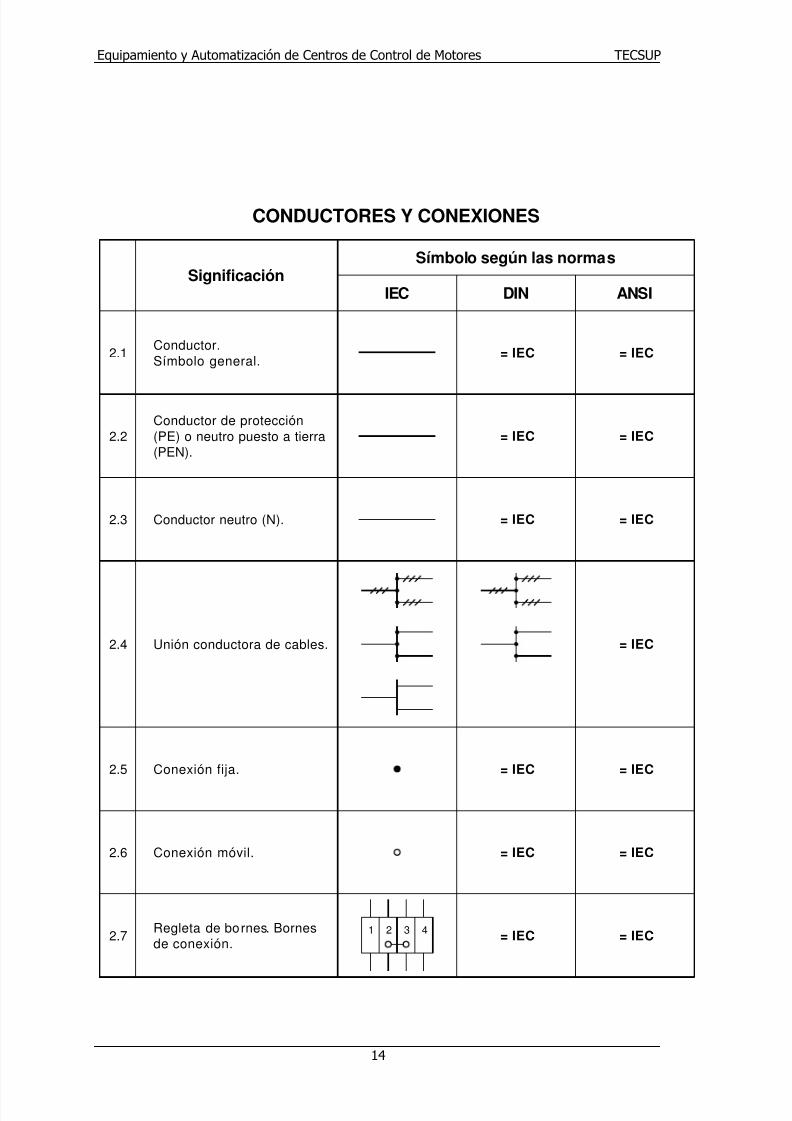
Conductor.
Símbolo general.
Conductor de protección
(PE) o neutro puesto a tierra
(PEN).
Conductor neutro (N).
Unión conductora de cables.
Conexión móvil.
Regleta de bornes. Bornes
de conexión.
SignificaciónSímbolo según las normas
IEC DIN ANSI
= IEC
CONDUCTORES Y CONEXIONES
2.1
2.2
2.3
2.4
2.5
2.6
2.7
Conexión fija.
1 2 3 4
= IEC
= IEC = IEC
= IEC = IEC
= IEC
= IEC = IEC
= IEC = IEC
= IEC = IEC
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 29/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
15
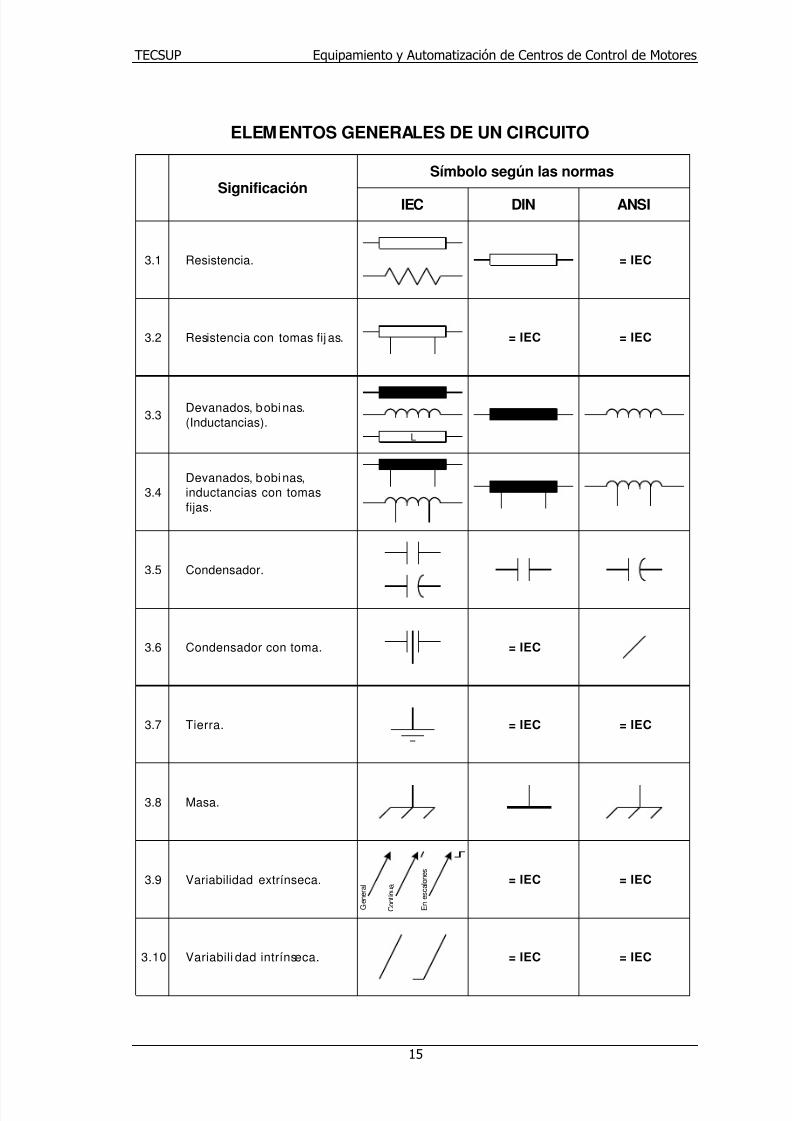
Resistencia.
Resistencia con tomas fij as.
Devanados, bobinas.
(Inductancias).
Devanados, bobinas,
inductancias con tomas
fijas.
Variabilidad extrínseca.
Condensador.
Condensador con toma.
Tierra.
Masa.
Variabili dad intrínseca.
SignificaciónSímbolo según las normas
IEC DIN ANSI
= IEC
ELEMENTOS GENERALES DE UN CIRCUITO
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
= IEC
= IEC = IEC
= IEC
L
= IEC
= IEC = IEC
G e n e r a l
C o n t i n u a
E n e s c a l o n e s
= IEC
= IEC
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 30/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
16
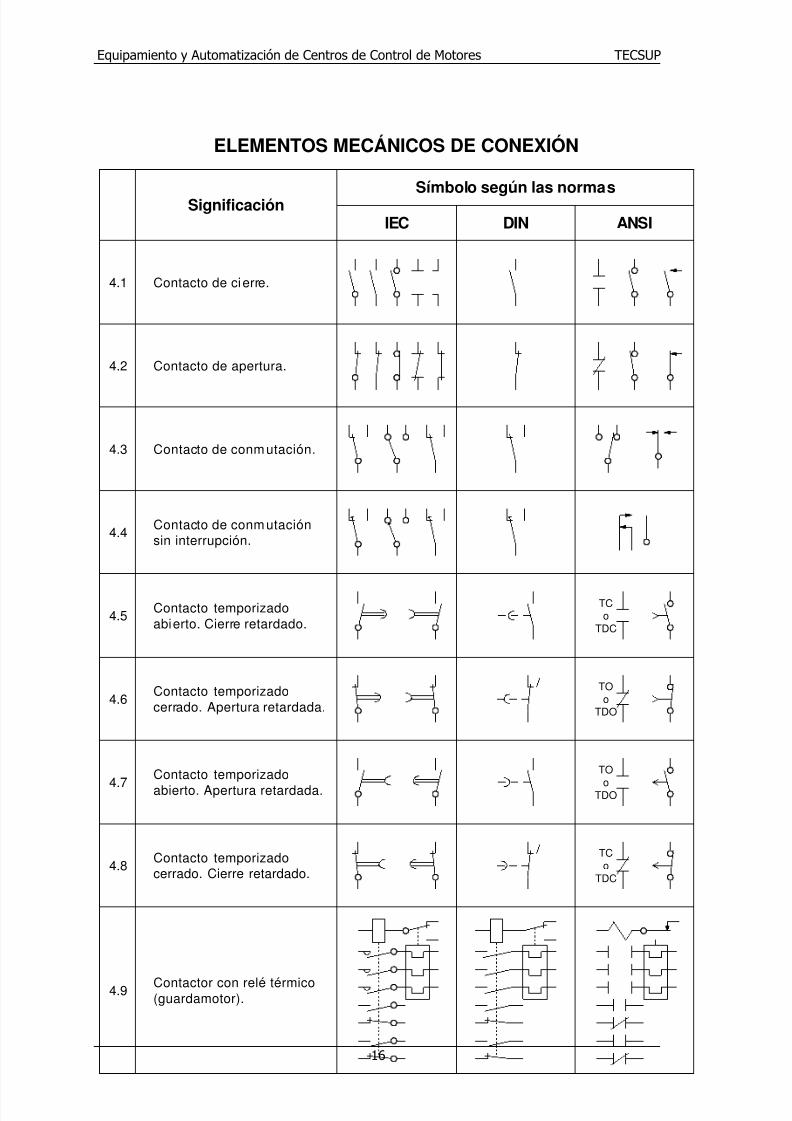
Contacto de cierre.
Contacto de apertura.
Contacto de conmutación.
Contacto de conmutación
sin interrupción.
Contactor con relé térmico(guardamotor).
Contacto temporizado
abierto. Cierre retardado.
SignificaciónSímbolo según las normas
IEC DIN ANSI
ELEMENTOS MECÁNICOS DE CONEXIÓN
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
Contacto temporizado
cerrado. Apertura retardada.
Contacto temporizado
abierto. Apertura retardada.
Contacto temporizado
cerrado. Cierre retardado.
TCo
TDC
TO
oTDO
TO
oTDO
TC
o
TDC
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 31/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
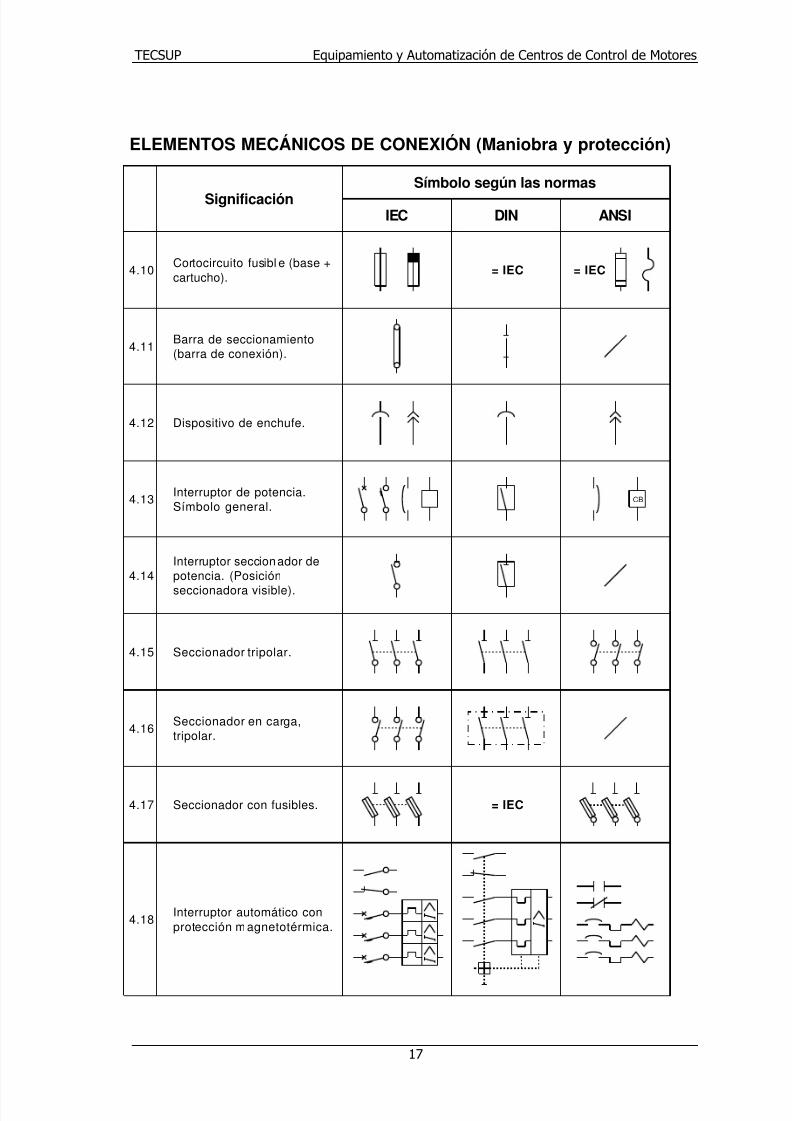
17
Cortocircuito fusibl e (base +
cartucho).
Barra de seccionamiento
(barra de conexión).
Dispositivo de enchufe.
Interruptor de potencia.
Símbolo general.
Interruptor automático con
protección magnetotérmica.
Interruptor seccionador de
potencia. (Posición
seccionadora visible).
Seccionador tripolar.
Seccionador en carga,
tripolar.
Seccionador con fusibles.
Significación
Símbolo según las normas
IEC DIN ANSI
= IEC
ELEMENTOS MECÁNICOS DE CONEXIÓN (Maniobra y protección)
4.10 = IEC
4.11
4.12
4.13
4.14
4.15
4.16
4.17
4.18
= IEC
CB
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 32/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
18
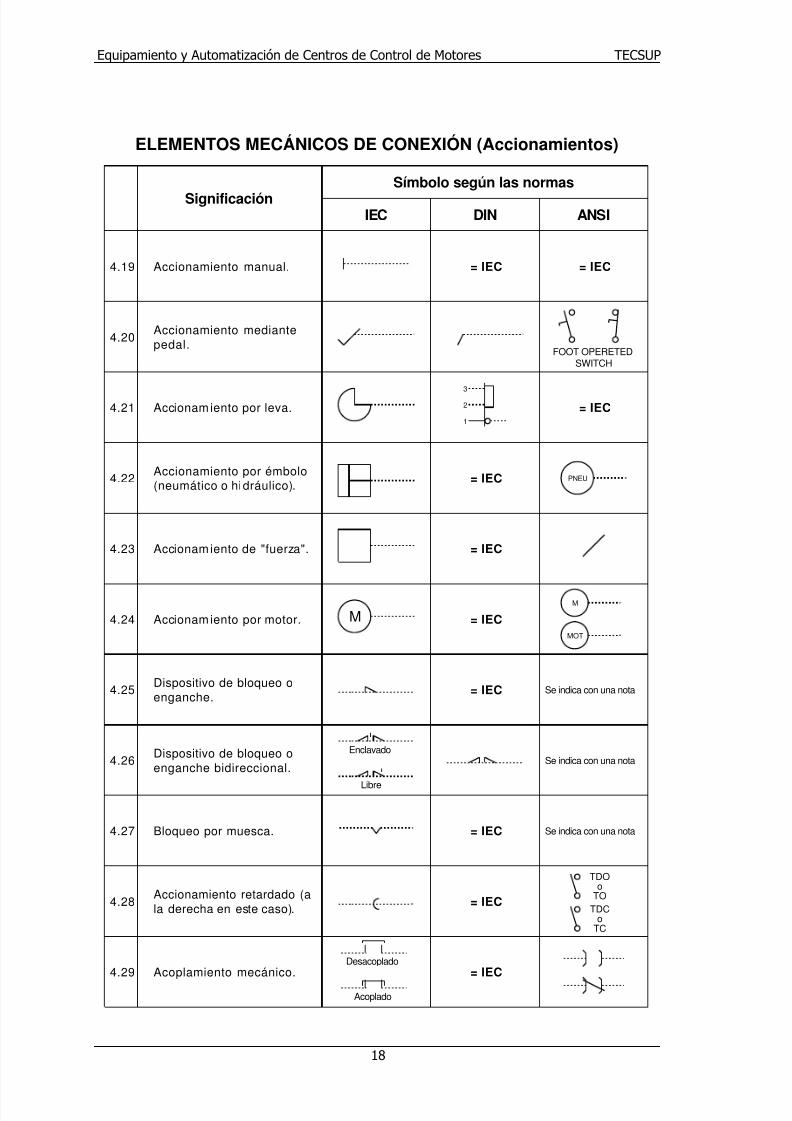
Accionamiento manual.
Accionamiento mediante
pedal.
Accionamiento por leva.
Accionamiento por émbolo(neumático o hidráulico).
Accionamiento de "fuerza".
Accionamiento por motor.
Dispositivo de bloqueo o
enganche.
Dispositivo de bloqueo o
enganche bidireccional.
Accionamiento retardado (a
la derecha en este caso).
Significación
Símbolo según las normas
IEC DIN ANSI
= IEC
ELEMENTOS MECÁNICOS DE CONEXIÓN (Accionamientos)
4.19
4.20
4.21
4.22
4.23
4.24
4.25
4.26
4.27
4.28
= IEC
Bloqueo por muesca.
Acoplamiento mecánico.4.29
M
Enclavado
Libre
Desacoplado
Acoplado
= IEC
= IEC
= IEC
= IEC
= IEC
= IEC
= IEC
1
2
3
FOOT OPERETEDSWITCH
= IEC
PNEU
M
MOT
Se indica con una nota
Se indica con una nota
Se indica con una nota
TDOo
TO
TDCo
TC

7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 33/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
19
Pulsador con accionamiento
manual en general (NA).
Pulsador con accionamiento
manual por empuje (NA).
Contacto con enclavamiento
rotativo, accionami ento
manual.
Conmutador con dos
posiciones y cero, con retorno
a cero al cesar la fuerza de
accionamiento (NA).
Conmutador con dosposiciones y cero, con
enclavamien to en las dos
posiciones.
Mando con pul sador.
Interruptor manual (auxili ar
de mando).
SignificaciónSímbolo según las normas
IEC DIN ANSI
AUXILIARES MANUALES DE MANDO
5.1
5.2
5.3
5.4
5.5
5.6
5.7
1 0 2
1 0 2
1 0 2
1 0 2
= IEC
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 34/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
20
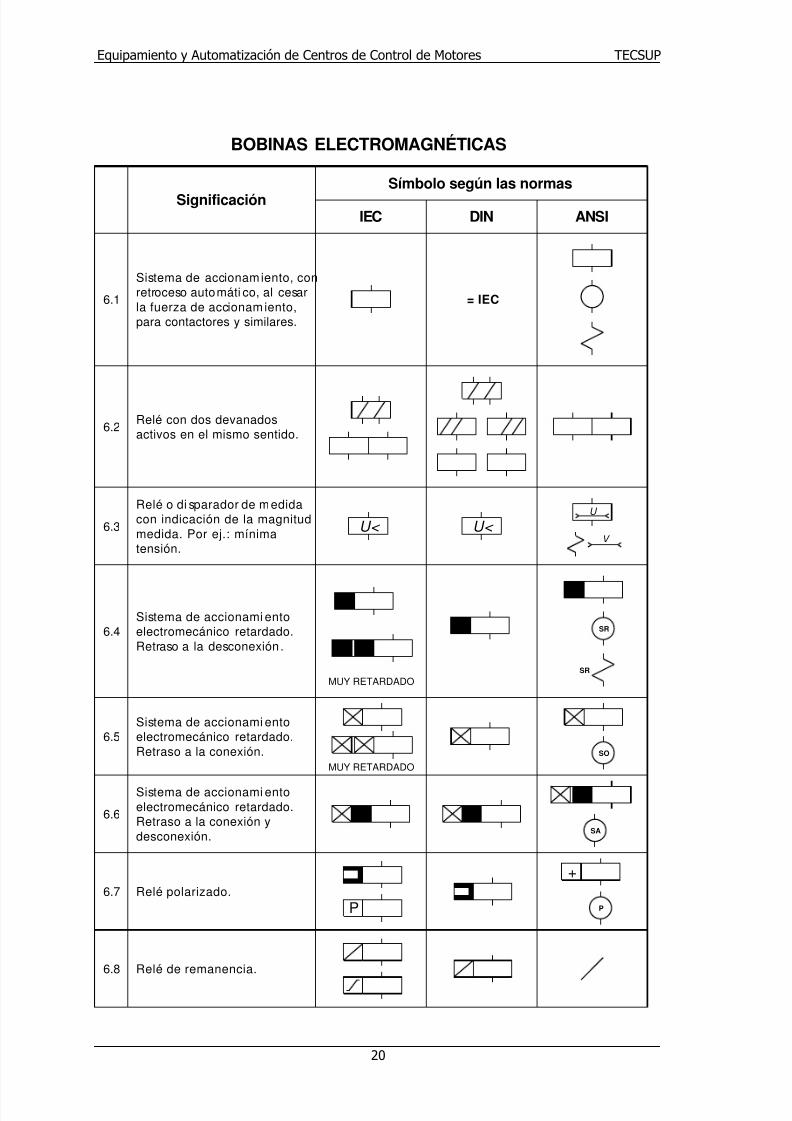
Sistema de accionamiento, con
retroceso automáti co, al cesar
la fuerza de accionamiento,
para contactores y similares.
Relé con dos devanados
activos en el mismo sentido.
Significación
Símbolo según las normas
IEC DIN ANSI
= IEC
BOBINAS ELECTROMAGNÉTICAS
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
Relé o di sparador de medida
con indicación de la magnitud
medida. Por ej.: mínima
tensión.
Sistema de accionami ento
electromecánico retardado.
Retraso a la desconexión .
Sistema de accionami ento
electromecánico retardado.
Retraso a la conexión.
Sistema de accionami ento
electromecánico retardado.
Retraso a la conexión y
desconexión.
Relé polarizado.
Relé de remanencia.
U< U<
U
V
MUY RETARDADO
SR
SR
MUY RETARDADO
SO
SA
P P
+
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 35/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
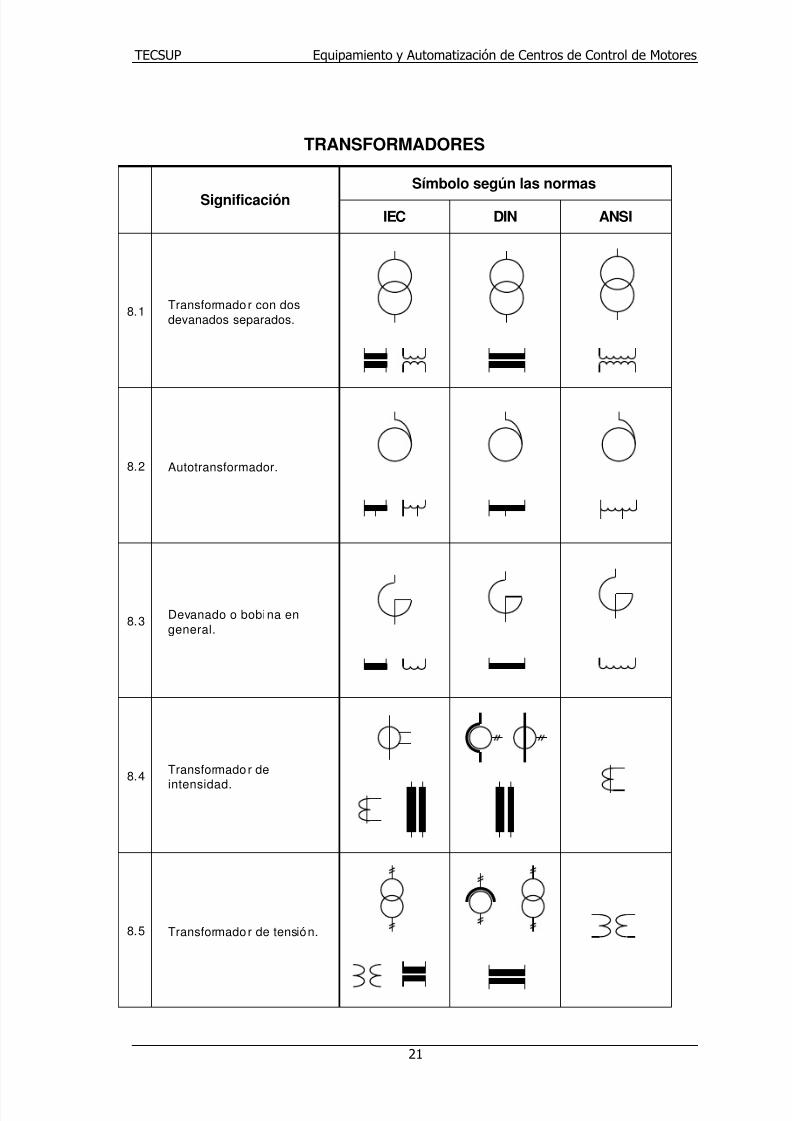
21
Transformador con dos
devanados separados.
Autotransformador.
Transformador de tensión.
Devanado o bobina en
general.
Transformador de
intensidad.
Significación
Símbolo según las normas
IEC DIN ANSI
TRANSFORMADORES
8.1
8.2
8.3
8.4
8.5
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 36/38
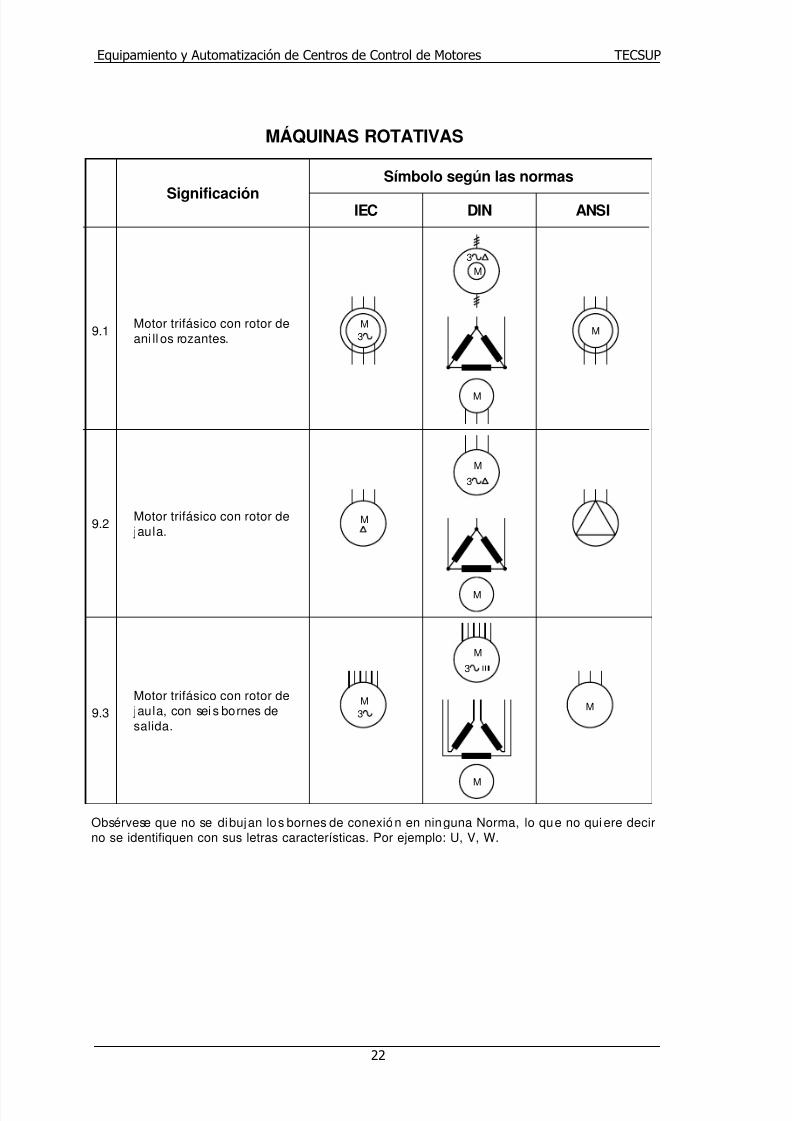
Equipamiento y Automatización de Centros de Control de Motores TECSUP
22
Motor trifásico con rotor de
ani ll os rozantes.
Motor trifásico con rotor de
jaula.
Motor trifásico con rotor de
jaula, con sei s bornes de
salida.
Significación
Símbolo según las normas
IEC DIN ANSI
MÁQUINAS ROTATIVAS
9.1
9.2
9.3
M
3
M
M
3M
3
M
M
M
3
M
M
M
3M
Obsérvese que no se dibujan los bornes de conexión en ninguna Norma, lo que no qui ere decirno se identifiquen con sus letras características. Por ejemplo: U, V, W.
7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 37/38
TECSUP Equipamiento y Automatización de Centros de Control de Motores
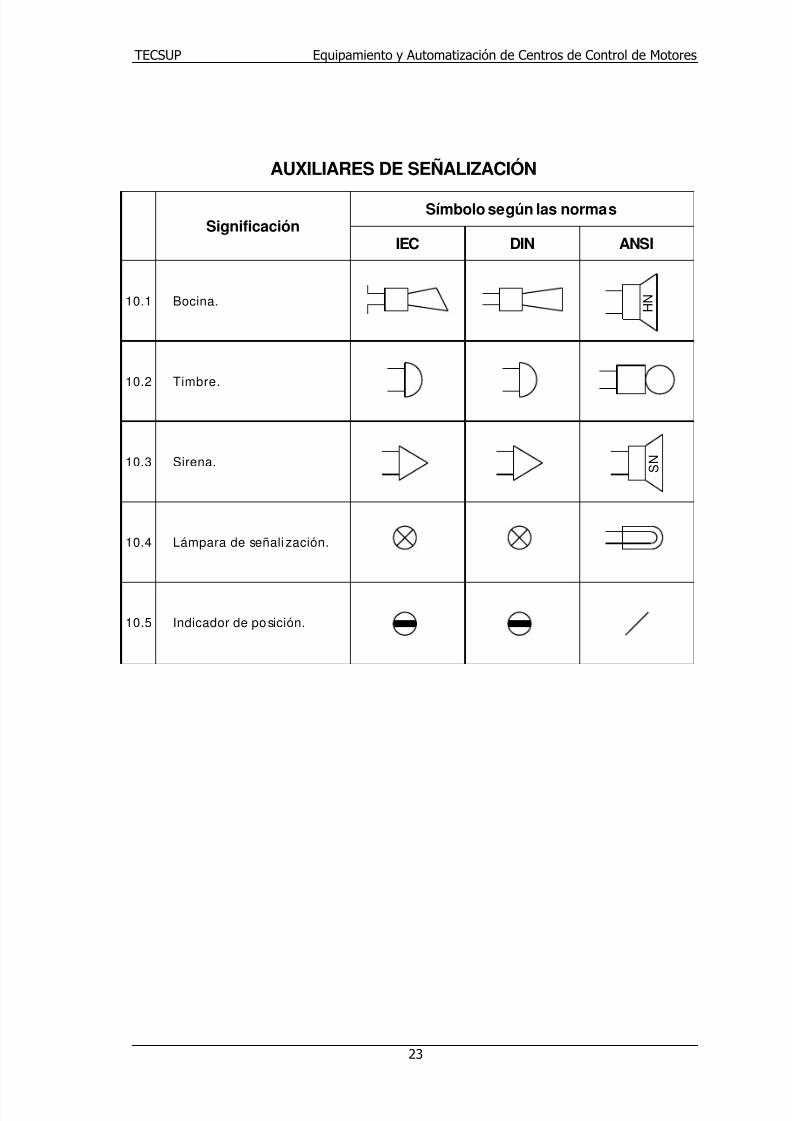
23
Bocina.
Timbre.
Sirena.
Lámpara de señali zación.
Indicador de posición.
SignificaciónSímbolo según las normas
IEC DIN ANSI
AUXILIARES DE SEÑALIZACIÓN
10.1
10.2
10.3
10.4
10.5
H N
S N

7/25/2019 CCM 4 TECSUP.pdf
http://slidepdf.com/reader/full/ccm-4-tecsuppdf 38/38
Equipamiento y Automatización de Centros de Control de Motores TECSUP
Voltímetro.
Amperímetro.
Vatímetro.
Fasímetro. (Indicando el
factor de potencia o el
ángulo).
Contador de impulsos.
Frecuencímetro.
Contador de energía activa.
Contador de energía
reactiva.
Contador de horas.
SignificaciónSímbolo según las normas
IEC DIN ANSI
= IEC
= IEC
APARATOS DE MEDIDA
11.1
11.2
11.3
11.4
11.5
11.6
11.7
11.8
11.9
= IEC
= IEC
= IEC
= IEC
= IEC
V
A
W
f
cos
Hz
Wh
VARh
h= IEC
= IEC