


Idiomas
Páginas
Jurídico


1
Dinámica de las rotaciones
Octubre 2009
Ver clases en: http://video.google.com.ar/videoplay?docid=2148804863890418261&ei=X87oSp4NnYapAoq3ucAM&q=momento+angular+clases+video&hl=es#
Física de las Traslaciones
Tiempo t Inercia = m= Masa
Posición x(t)
Velocidad v(t)=dx(t)dt
Aceleración a(t)=dv/dt
Momento lineal p(t)=mv(t)
Energía Cinético Ec=½m.v2
Ley Fundamental
Fuerza F
dt
pdamF
rrr
==
Física de las Rotaciones
Tiempo t Inercia = I= Momento de Inercia
Posición θ(t)
Velocidad ω(t)=dθ(t)dt
Aceleración α(t)=dω/dt
Momento lineal L(t)=Iω
Energía Cinético Ec=½I.ω2
Ley Fundamental
Fuerza τdt
LdI
rrr
== ατ
2
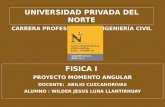
2. Momento angular o cinético L
)( vrmprLorrrrr
×=×=
Momento angular o Momento angular o cincinééticotico de un punto material respecto de un punto O es el momento de la cantidad de movimiento respecto a dicho punto O
rr
vr
mP0L
r
O Propiedades de 0Lr
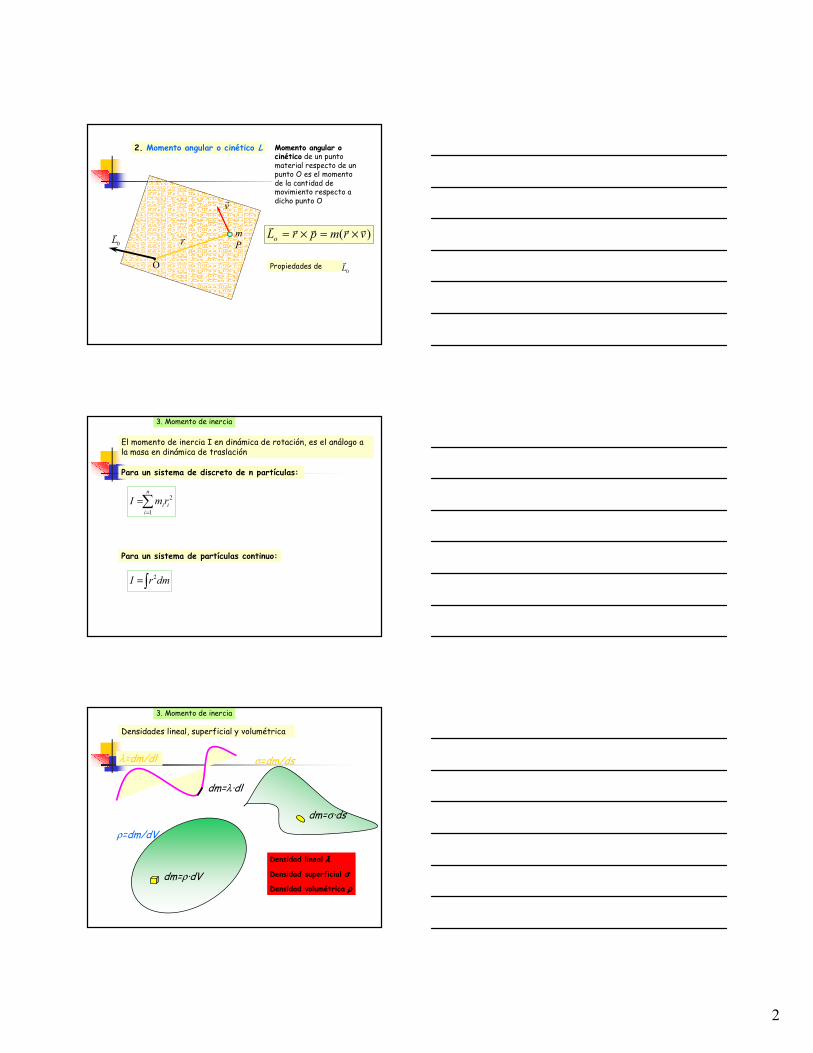
3. Momento de inercia
El momento de inercia I en dinámica de rotación, es el análogo a la masa en dinámica de traslación
Para un sistema de discreto de n partículas:
Para un sistema de partículas continuo:
2
1
n
i ii
I m r=
=∑
2I r dm=∫
3. Momento de inercia
Densidades lineal, superficial y volumétrica
λ=dm/dl
dm=λ·dl
σ=dm/ds
dm=σ·ds
ρ=dm/dV
dm=ρ·dV
Densidad lineal λλλλ
Densidad superficial σσσσ
Densidad volumétrica ρρρρ

3
3. Momento de inercia
Momentos de inercia de cuerpos rígidos homogéneos con diferentes formas geométricas
4. Teorema de Stenier Teorema ejes Paralelos
Este teorema permite calcular el momento de inercia de un sólido respecto a un eje paralelo a uno que pase por el centro de masas (CM) de dicho sólido
Matemáticamente
2·E CMI I M h= +
El momento de inercia IE respecto a un eje E paralelo al eje que pasa por el centro de masas es igual al momento de inercia respecto al centro de masas ICM más el producto de la masa M por la distancia de separación entre ambos ejes al cuadrado
E
Copyright (c) 2000 by W. H. Freeman and Company and Worth Publishers (Freeman/Worth).
Tipler Physics textbook
5. Rotación de un sólido rígido alrededor de un eje fijo
Un sólido rígido es aquel que no se deforma y que por tanto mantiene su forma y su tamaño.
El movimiento más general de un sólido rígido en el espacio se puede analizar estudiando dos tipos de movimiento simultáneos:
a) Traslación del centro de masas (CM) del sólido
b) Rotación del sólido alrededor de un eje que pasa por el centro de masas
Movimiento general de un sólido rígido en el espacio
4
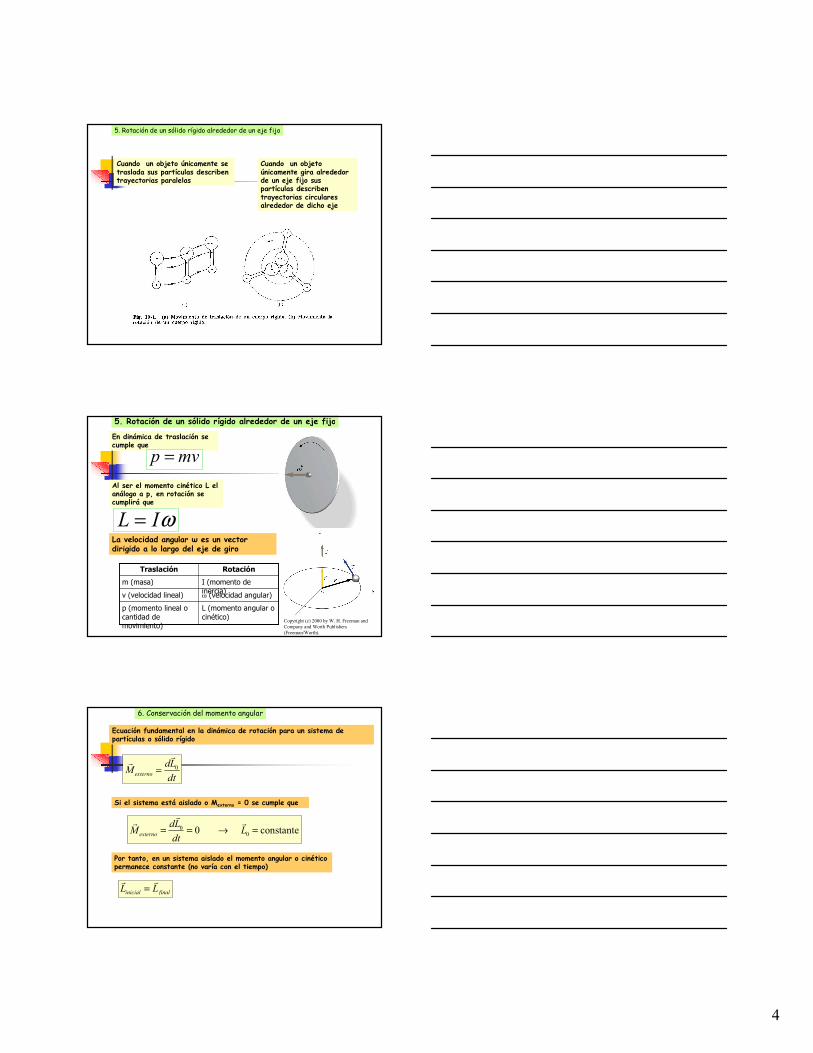
5. Rotación de un sólido rígido alrededor de un eje fijo
Cuando un objeto únicamente se traslada sus partículas describen trayectorias paralelas
Cuando un objeto únicamente gira alrededor de un eje fijo sus partículas describen trayectorias circulares alrededor de dicho eje
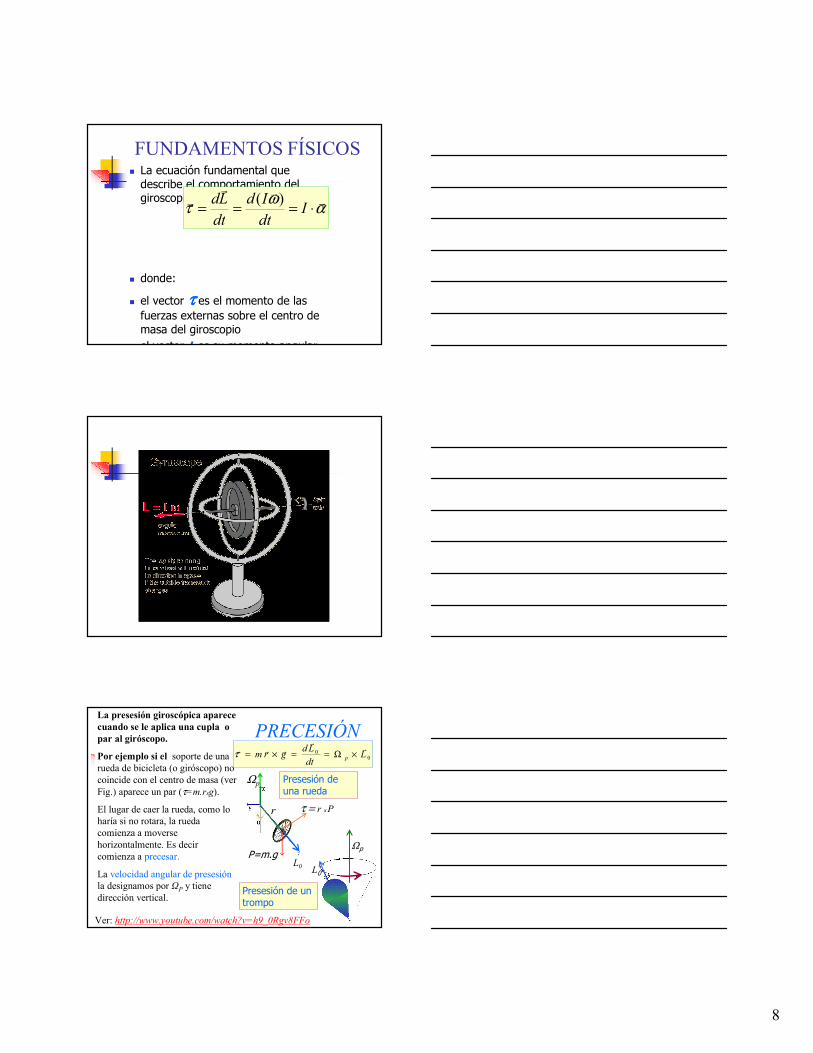
5. Rotación de un sólido rígido alrededor de un eje fijo
En dinámica de traslación se cumple que
p mv=
Al ser el momento cinético L el análogo a p, en rotación se cumplirá que
L Iω=
L (momento angular o cinético)
p (momento lineal o cantidad de movimiento)
ω (velocidad angular)v (velocidad lineal)
I (momento de inercia)
m (masa)
RotaciónTraslación
Copyright (c) 2000 by W. H. Freeman and Company and Worth Publishers (Freeman/Worth).
La velocidad angular ω es un vector dirigido a lo largo del eje de giro
6. Conservación del momento angular
0externo
dLM
dt=
rr
Ecuación fundamental en la dinámica de rotación para un sistema de partículas o sólido rígido
Si el sistema está aislado o Mexterno = 0 se cumple que
000 constanteexterno
dLM L
dt= = → =
rr r
Por tanto, en un sistema aislado el momento angular o cinético permanece constante (no varía con el tiempo)
inicial finalL L=r r

5
6.1 Segunda ley de Newton en la dinámica de rotación
En dinámica de traslación se tiene que
F ma=r r
En dinámica de rotación se ha de cumplir que
M Iα=r r
L (momento angular o cinético)p (momento lineal o cantidad de movimiento)
M (momento de una fuerza)F (fuerza)
α (aceleración angular)a (aceleración lineal)
ω (velocidad angular)v (velocidad lineal)
I (momento de inercia)m (masa)
RotaciónTraslación
Momento de una fuerza respecto a un punto
M r F= ×r rr
vr
Momento del vector v respecto al Momento del vector v respecto al punto Opunto O
vOPM rr×=
→Mr
O
P
Si v pasa a ser una Si v pasa a ser una fuerza F, el fuerza F, el momento pasa a ser momento pasa a ser momento de una momento de una fuerza respecto a fuerza respecto a un puntoun punto
6.2 Momento de una fuerza respecto a un punto
M r F= ×r rr
sin perpendicularM rF rFφ= =
Si calculamos el módulo del momento se obtiene que
Sólo la componente perpendicular de la fuerza contribuye al momento y por tanto a la rotación
Otro modo de calcular el Otro modo de calcular el mmóódulo del momentodulo del momento
( sin )M F r Fdφ= =
donde d es el brazo del momento

6
I (momento de inercia)m (masa)
θ ( desplazamiento angular)x (desplazamiento lineal)
M (momento de una fuerza)F (fuerza)
Lincial= Lfinal (conservación del momento angular o cinético)
pincial= pfinal (conservación de la cantidad de movimiento)
M = dL/dt
M = I α (2ª ley de Newton)
F = dp/dt
F = ma (2ª ley de Newton)
L = I ω (momento angular o cinético)
p = mv (momento lineal o cantidad de movimiento)
α (aceleración angular)a (aceleración lineal)
ω (velocidad angular)v (velocidad lineal)
RotaciónTraslación
7. Tabla resumen
Leyes de conservación
• El momento lineal P (si Fext=0) se conserva
•El momento langular L (si ττττext=0) se conserva
•Ver: http://www.youtube.com/watch?v=V3UsrfHa4MQ&feature=related
•Piruela:http://www.youtube.com/watch?v=7yr_mltrWpM
EL GIRÓSCOPO

7
INTRODUCCIÓN
Un giróscopo o giroscopio es un dispositivo mecánico que muestra el principio de conservación del momento angular. En física también es conocido como inercia giroscópica.
La esencia del dispositivo es una masa con forma de rueda girando alrededor de un eje. A su vez está montado sobre un sistema que permite que el eje pueda tomar cualquier orientación. Una vez que está girando tiende a resistirse a los cambios en la orientación del eje de rotación.
Ver:http://www.youtube.com/watch?v=cquvA_IpEsA
CONSERVACIÓN DEL MOMENTO ANGULAR
El momento angular, momentum angular o momento cinético, de símbolo L, en física clásica, es igual al producto
vectorial de la cantidad de movimiento p (también llamado momento lineal o momentum) por el vector de posición, r, del objeto en relación al punto considerado como eje de rotación. El momento de las fuerzas que actúan sobre un sólido rígido hace cambiar el momento angular con el tiempoEl principio de conservación del momento angular afirma que si el momento de las fuerzas exteriores es cero (lo que no implica que las fuerzas exteriores sean cero, que sea un sistema aislado), el momento angular total se conserva, es decir, permanece constante.
vrmprL rrrrr×⋅=×=
exdt
Ldτr
r
=
00 =→= Lex
rrτ
INERCIA GIROSCÓPICA En general cuando aplicamos una
fuerza a un cuerpo, este tiende a moverse en la dirección de la fuerza. Esto es particularmente cierto en las traslaciones.
En el caso del giroscopio o giróscopo, ocurre un hecho paradójico. El movimiento del mismo es perpendicular a la dirección de la fuerza que genera el movimiento!!!
8
FUNDAMENTOS FÍSICOS La ecuación fundamental que describe el comportamiento del giroscopio es:
donde:
el vector ττττ es el momento de las
fuerzas externas sobre el centro de masa del giroscopio
el vector L es su momento angular
αω
τr
rrr
⋅=== Idt
Id
dt
Ld )(
PRECESIÓNLa presesión giroscópica aparece
cuando se le aplica una cupla o
par al giróscopo.
Por ejemplo si el soporte de una rueda de bicicleta (o giróscopo) no coincide con el centro de masa (ver Fig.) aparece un par (τ=m.rxg).
El lugar de caer la rueda, como lo haría si no rotara, la rueda comienza a moverse horizontalmente. Es decir comienza a precesar.
La velocidad angular de presesiónla designamos por ΩP y tiene dirección vertical.
Ver: http://www.youtube.com/watch?v=h9_0Rgv8FFo
00 L
dt
Ldgrm p
rr
rrr×Ω==×=τ
P=m.gL0
τ = r x Pr
Ωp
Ωp
L0
Presesión de una rueda
Presesión de un trompo

9
NUTACIÓN Una observación cuidadosa del
movimiento de un giroscopio revela Asociado al movimiento de presesión aparece un “cebeceo”u oscilación del eje, esta oscilación vertical denominada nutación.
Ver:http://www.youtube.com/watch?v=75BM2O8ytZs
HISTORIA
1817Johann Bohnenberger (en la Universidad de Tubingen) descubre el giróscopo
1852 El científico francés Jean Bernard León Foucault (1826-64) fue el primero en usar el término giroscopio. Dirigió multitud de experimentos con giroscopios y se le concedió la invención del dispositivo.
1852-1968 Se crea un nuevo estilo de giroscopio que usa el esfuerzo de torsión gravitacional para conseguir que el giroscopio rote alrededor de una base central.
1909 Elmer A. Sperry construye el primer piloto automático para aeronaves usando giroscopios.
Foucault
Sperry
Bohnenberger
Tipos de Giroscopios

10
Ver Giroscopios en acción
•http://www.youtube.com/watch?v=75BM2O8ytZs
http://www.youtube.com/watch?v=cquvA_IpEsA
Ver clases en: http://video.google.com.ar/videoplay?docid=2148804863890418261&ei=X87oSp4NnYapAoq3ucAM&q=momento+angular+clases+video&hl=es#
Problemas resueltos
Ejemplos
Trabajo y Energía
Trabajo hecho por un torque ττττactuando por un desplazamiento angular θθθθ :
Potencia:
W = τθτθτθτθ
PdW
dt
d
dt= = =ττττ
θθθθτωτωτωτω

11
Problemas: Poleas
Una masa m cuelga de una polea de radio R unida a un disco. El momento de inercia de la polea +disco es I
Partiendo del reposo, cual de la velocidad vf cuando el cuerpo desciende una distancia L.
I
m
R
T
mg
αααα
a
L
Poleas... Aplicando Diagrama de cuerpo libre:
F = ma ---- sobre masa m mg - T = ma
Polea +disco ττττ = Iαααα
ττττ = TR = Iαααα
a = ααααR (conexión entre aceleraciones)
Encontramos a
vf2=
I
m
R
T
mg
αααα
a
L
gImR
mRa
+= 2
2
TRa
R= I
LgImR
mRv f ⋅
+= 2
22 2Lav ..22
0 +
Problema: Roto traslación
Un objeto de masa M, radio R, y momento de inercia I rueda por un plano inclinado (ángulo θ con respecto a la horizontal. ¿Cuál es la aceleración?
Consideramos traslación del CM y rotación alrededor del CM separadamente. θ
R
I
M

12
Roto traslación...
Fricción f causes rotación.
Diagrama de cuerpo libre FNET = M aCM
En x Mg sin θ - f = M aCM
rotación CMusamos ττττ = Iααααττττ = Rf y aCM= ααααR
R
M
θ
f
Mg
y
x
R
afR CMI=⋅
2I
R
af MC
=
Roto traslación...
despejando: y 2R
aIf CM=
+=
IMR θMR
gaCM 2
2 sin
θ
acm R
I
M
θgMRMR
θMRgaCM sin
7
5
5
2sin
22
2
=
+
=
Caso de una Esfera maciza
CMmafMg =-sinθ
2
5
2MRI =
Maquina Atwood
¿Cual es la aceleración?
Diagrama de cuerpo libre (tres cuerpos)
m2m1
R
M
y
x
m2g
aT
1
m1g
a
T2
Para las masas que cuelgan: F = ma
+m1g -T1 = m1a
m2g - T2 = -m2a
αααα
I =1
2
2MRPara un disco:
Para la Polea ττττ = Iαααα
+
R
aIIRTT ==+ α)( 21
13
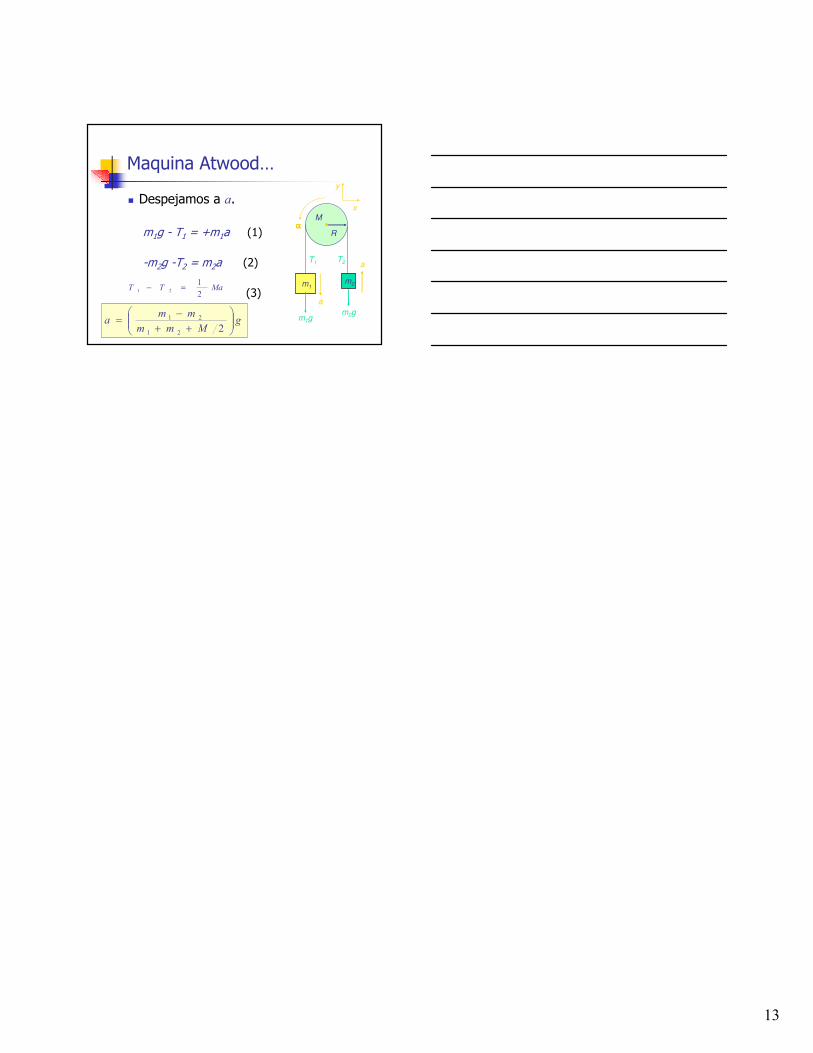
Maquina Atwood…
Despejamos a a.
m1g - T1 = +m1a (1)
-m2g -T2 = m2a (2)
(3)
gMmm
mma
++
−=
221
21
MaTT2
121 =−
m2m1
R
M
y
x
αααα
m2m1
m2g
aT1
m1g
a
T2
Top Related