




Idiomas
Páginas
Jurídico


10.03.02
Especificación
Spez KR 30--3, KR 60--3 es
Robots KR 30--3KR 60--3KR 30 L16

Spez KR 30--3, KR 60--3 es 10.03.022
e Copyright KUKA Roboter GmbH

10.03.02 Spez KR 30--3, KR 60--3 es 3
Indice
1 DESCRIPCION DEL SISTEMA 3.1.1 Generalidades 3. . . . . . . . . . . . . . . . .1.2 Mecánica del robot 4. . . . . . . . . . . . .1.3 Instalación 4. . . . . . . . . . . . . . . . . . . .1.4 Reemplazo 5. . . . . . . . . . . . . . . . . . .1.5 Transporte 5. . . . . . . . . . . . . . . . . . . .
2 ACCESORIOS (SELECCION) 6. .2.1 Fijación del robot 6. . . . . . . . . . . . . .2.2 Eje de desplazamiento adicional 6.2.3 Alimentación de energía integrada
de eje 1 hacia eje 3 6. . . . . . . . . . . .2.4 Control del campo de trabajo 6. . . .2.5 Limitación del campo de trabajo 6.2.6 Juego de ajuste KTL 6. . . . . . . . . . .2.7 Medidor de la tensión mecánica de la
correa para la muñeca central 6. . .2.8 Dispositivo de liberación
para los ejes del robot 6. . . . . . . . . .
3 DATOS TECNICOS 7. . . . . . . . . . . .
Figuras 10--27. . . . . . . . . . . . . . . . . . . . . .
1 DESCRIPCION DEL SISTEMA
1.1 Generalidades
Los robots del tipo KR 30--3, KR 60--3 (fig. 1--1),KR 60 L45--3, KR 60 L30--3 y KR 30 L16 sonrobots industriales de seis ejes con cinemática dearticulación, para todas las tareas de trayectoria.Las aplicaciones más frecuentes son:-- manipulación-- montaje-- aplicacióndeadhesivos, sellantes ymedios de
conservación-- maquinado-- soldadura MIG/MAG-- soldadura YAG Laser.Los robots KR 30--3, KR 60--3, KR 60 L45--3,KR 60 L30--3 pueden montarse de formavariable. El robot KR 30 L16 puede ser montadocontra el piso o el techo.
Cargas nominales y cargas adicionales (verapartado 3 “Datos técnicos”) pueden moversecon el máximo alcance del brazo, también convelocidad máxima.
Todos los cuerpos base de los gruposconstructivos principales que forman los distintosmovimientos, están fabricados con fundición demetal liviano. Este concepto de diseño fueoptimizado utilizando CAD y FEM, teniendo encuenta la efectividad económica de unaconstrucción liviana y de alta rigidez a la torsión ya la flexión. De ello resulta una alta frecuencia
natural del robot, presentando una buenaperformance dinámica con alta resistencia a lasvibraciones.
Las articulaciones y los reductores se muevenprácticamente libres de juegos, y todas las piezasen movimiento están cubiertas. Todos losmotores de accionamiento son servomotores deCA sin escobillas, en técnica enchufable y libresde mantenimiento, asegurados contrasobrecargas.
Los ejes principales son del tipo de lubricaciónpermanente, es decir, un cambio deaceite sólo esnecesario después de 20.000 horas de servicio.
Todos los componentes del robot tienen undiseñosencillo y claro, minimizados en cantidad y de fácilacceso a los mismos. El robot también puede serreemplazado por otro como unidad completa, enforma rápida y sin necesidad de realizarmodificaciones esenciales en el programa. Esposible efectuar movimientos por sobre cabeza.
Por éstos y otra gran cantidad de detallesconstructivos, los robots son rápidos, brindandoseguridad de servicio, requeriendo unmantenimientomínimo y fácil. Sólo precisan pocoespacio para su instalación, y debido a sugeometría constructiva especial, pueden estarmuy cerca de las piezas a trabajar. Como todoslos robots KUKA, tienen una vida útil promedioentre 10 y 15 años.
Cada robot está equipado con una unidad decontrol, cuya electrónica de mando y de potenciase encuentran juntas e integradas en un armariode control (ver especificación especial). Esteocupa un espacio reducido, es de mantenimientosimple y fácil manejo para el usuario. El estándarde seguridad corresponde a las normativas de laCE para construcción de máquinas, y a lasnormas vigentes (por ej. DIN 775).
Los cables de unión entre el robot y la unidad decontrol contienen todos los cables dealimentación y de señales necesarios. Enel robot,han sido ejecutados en técnica enchufable;también los cables de alimentación de energía ylas tuberías flexibles y cables para el servicio conútiles (accesorio “Alimentación de energía paraeje 1 hasta eje 3”). Todos estos conductos yconductores están, en la zona del eje base 1,fijamente instalados. En caso de necesidad, en elservicio con útiles, la alimentación de energía alos mismos puede instalarse a lo largo de los ejessubsiguientes, con ayuda de puntos de conexióndel sistema.

Spez KR 30--3, KR 60--3 es 10.03.024
1.2 Mecánica del robot
El robot consta de una base fija, sobre la cual gira,alrededor de un eje vertical, la columna giratoria,con un brazo de oscilación, un brazo y unamuñeca (fig. 1--1).
Lamuñeca (fig. 1--2) sirve, con subrida deacople,para el montaje de herramientas y útiles (por ej.garras, dispositivos de soldadura).
Las posibilidades de los movimientos del robotpueden verse en la fig 1--3.
La medición de los trayectos para los ejes base(A 1 hasta A 3) y de la muñeca (A 4 hasta A 6), serealiza a través de un sistema demedición cíclicoabsoluto con un resolver para cada eje.
El accionamiento se efectúa por medio deservomotores de CA de baja inercia, de mandotransistorizado. En las unidadesmotóricas, y paraahoro de espacio, van integrados el resolver y elfreno.
El campode trabajo del robot es limitado, en todoslos ejes, por medio de límites de carrera software.Además, los ejes 1, 2, 3 y 5 se limitan por mediode topes finales de absorción de energía.
También se dispone, como accesorio mecánico,de topes de “Limitación del campo de trabajo”para la limitación del rango de trabajo de los ejes1 hasta 3 para tareas específicas.
En caso de un requerimiento de cargasmecánicas y térmicas mayores, se dispone de lavariante demuñeca central “F”. Está ejecutadaenuna versión más estanca y equipada con piezasy componentes resistentes a la corroción. Paramantener la capacidadde carga, deben cumplirsecon intervalos de mantenimiento más cortos.
En robots de la variante “F” el brazo se encuentrabajo presión interna. Es operado con una presióninterna de 0,1 bar.
1.3 Instalación
Para la instalación del robot se tienen variasposibilidades:
-- Variante 1 (fijación de la bancada demáquina)
Esta variante puede adquirirse con pernos derecepción y tornillos como accesorio “Juegode fijación de la bancada demáquina”. El robotes colocado sobre una construcción de aceropreparada y es atornillado con seis tornillos(fig. 1--4). Su posición de montaje estádeterminadapor dos pernos de recepción, queposibilita un reemplazo con repetibilidad.
-- Variante 2 (fijación al fundamento)
Esta variante se entrega con placasintermedias, pernos de recepción, anclajescompuestos y tornillos como accesorio “Juegode fijación al fundamento”. El robot se coloca,con tres cuatro placas intermedias (fig. 1--5),sobre el piso preparado de la nave. Suposición demontaje está determinada por dospernos de recepción, que posibilita unreemplazo con repetibilidad. La fijación delrobot se realiza a las placas intermedias conseis tornillos.Antes de colocar el robot, se fijan las placasintermedias al piso de la nave cada una contres anclajes.
ATENCION en las variantes 1 y 3:En la preparación de un fundamento debenconsiderarse las prescripciones válidassobre construcción respecto a la calidaddel hormigón (�B25 segúnDIN 1045:1988oC20/25 según DIN EN 206--1:2001 / DIN1045--2:2001) y la capacidad de carga delsuelo. En lapreparacióndel hormigóndebeprestarse atención que la superficie delmismo sea suficientemente plana y lisa.La colocación de los tacos pegados deberealizarseconmuchocuidado, paraque lasfuerzas generadas durante el servicio (fig.1--7) puedan transmitirse al piso en formasegura. La figura 1--7 también puedeutilizarse para realizar estudios estáticoscomplementarios.
-- Variante 3 (placa de adaptación)
Esta variante se entrega con placaintermedias pernos de recepción y tornilloscomo accesorio “Placa de adaptación”. Laplaca intermedia es fijada conocho tornillos decabeza hexagonal, antes de colocar el robot, auna construcción de acero ya preparada o alcarro de desplazamiento de una unidad lineal.La fijación del robot se realiza a la placaintermedia con seis tornillos (fig. 1--6). Suposición demontaje está determinada por dospernos de recepción, que posibilita unreemplazo con repetibilidad.
ATENCION para robots de montaje contra lapared:En robots demontaje contra la pared, se tieneuna restricción del rango de giro alrededordel eje1. Los rangos de giro permitidos, endependencia del ángulo entre la pared y elrobot, pueden consultarse en las figuras 3--12y 3--13.

10.03.02 Spez KR 30--3, KR 60--3 es 5
La restricciones del rango de giro alrededor deleje 1deben ser respetadas incondicionalmente,y en lo posible, asegurarlas pormedio de topesfijos. ¡Si no se respetan los límites, ésto puedecausar la sobrecarga de los frenos de retencióny el robot puede efectuar movimientos sincontrol, existiendo peligro de accidentesmortales!
1.4 Reemplazo
En instalaciones robotizadas con una mayorcantidad de robots, es de suma importancia laposibilidad de reemplazar un robot por otro sindificultades. Esto está garantizada por:
-- la reproducibilidad de las posiciones desincronización de cada eje, llamadasposiciones mecánicas cero, y por
-- el ajuste del punto cero asistido por ordenador,
y adicionalmente se ve favorecido por:
-- la posibilidadde unaprogramación offline lejosdel robot, y por
-- la reproducibilidad del montaje del robot.
La finalización de los trabajos de mantenimientoy reparación (entre otros, lo que respecta a lamuñeca y los motores), exige el establecimientode las posiciones cero mecánicas y eléctricas(calibración) del robot. Para ello se handispuesto,desde fábrica, cartuchos de medición para cadaeje.
El ajuste de los cartuchos de medición formaparte de las operaciones de medición y ajuste enfábrica, antes de la entrega del robot. Dado quecada eje se mide siempre con el mismo cartucho,se consigue un alto grado de exactitud para laprimera medición y para la búsqueda posterior delas posiciones mecánicas cero.
Para conseguir la visualización de la posición delcomparador colocado en el cartucho, se tiene,como accesorio, una unidad electrónica de ajuste(Juego de ajuste KTL) que se enrosca en elcartucho de medición. Al pasar sobre laentalladura de medición durante el proceso deajuste, el sistema de medición deposicionamiento, automáticamente, es puestoeléctricamente a cero.
Una vez realizado el ajuste del punto cero paratodos los ejes, el robot puede ser puestonuevamente en servicio.
Los procedimientos arribamencionados permitenque, una vez determinado un programa, puedautilizarse éste en cualquier otro robot del mismotipo.
1.5 TransporteDuranteel transporte del robot debecuidarse,en todo momento, que el mismo no vuelque.Hasta que el robot no esté fijado alfundamento, debe mantenerse al mismo enposición de transporte.El robot puede ser transportado de dos manerasdiferentes (fig. 1--9):
-- Con un aparejo de transporte y grúa
El robot puede ir colgado de un aparejo detransporte, cuyas cuerdas van enganchadasen los tres tornillos de cáncamo de la columnagiratoria; el aparejo va cogidodeuna grúaparapoder transportar así el robot.
Para el transporte del robot con grúa,deben utilizarse solamente cabrias oaparejos con la suficiente capacidad decarga.
-- Con carretilla elevadora de horquilla
Para el transporte con la carretilla elevadorade horquilla, deben montarse a la columnagiratoria, dos receptores de horquillas(accesorio) para carretillas elevadoras.Para el tipo de fijación al techo, el robot seentrega colgado dentro de un bastidorespecial de transporte. Con una carretillaelevadora de horquilla puede ser recogido deeste bastidor ya en la posición correcta demontaje y transportado.
Para el transporte del robot mediante unacarretilla elevadora de horquilla no debenutilizarse cabrias de elevación de cargas.
Antes de cada transporte, el robot debe serpuesto en la posición de transporte (fig. 1--10):
A1 A2 A3 A4 A5 A6
0˚ --135˚ +155˚ 0˚ +90˚ 0˚
Estas indicaciones de ángulos se refieren a lasindicaciones en la pantalla del KCPpara cadaunode los ejes del robot.
Medidas para el embalaje del robot en uncontainer (fig. 1--10):
Tipo de robot L(mm)
An1) (mm) 2)
Al(mm)
KR 30--3 1292 1128 688 1870KR 60--3 1292 1128 688 1870KR 60 L45--3 1467 1128 688 1870KR 60 L30--3 1648 1128 688 1870KR 30 L16 2017 1128 688 1870
1) con receptores de horquillas2) sin receptores de horquillas

Spez KR 30--3, KR 60--3 es 10.03.026
2 ACCESORIOS (selección)
2.1 Fijación del robot
La fijación del robot puede realizarse en tresvariantes distintas:-- con el juego de fijación de la bancada de
máquina (fig. 1--4)-- conel juegode fijaciónal fundamento (fig. 1--5)-- con placa de adaptación (fig. 1--6)
Descripción ver apartado 1.3.
2.2 Eje de desplazamiento adicional
Con ayuda de este accesorio, una unidad linealcomo eje de traslación adicional, basado en lostipos constructivos de la serie KL 1500 (fig. 2--1),puede desplazarse al robot con unmovimiento detraslación, libremente programable, sobre el pisoo colgado del techo.
2.3 Alimentación de energíaintegrada en el eje 1 hasta eje 3
Se dispone de distintas alimentaciones deenergía, por ej. para las aplicación“Manipulación”. Los correspondientes cables yconductores se encuentran instalados desde elpanel de conectores en el interior de la base delrobot, y a continuación contra la parte exterior dela columnagiratoria y el brazode oscilación, hastaun punto de conexión en el brazo (fig. 2--2).
Desde allí, pueden llevarse conductos yconductores adicionales por el lado exterior delbrazohasta el correspondiente punto de conexiónen el útil. Con ello se evita una instalación conbandera con el correspondiente ahorro deespacio.
2.4 Control del campo de trabajo
Los ejes 1 y 2 pueden equiparse con límites decarrera eléctricos y aros ranurados, sobre loscuales pueden fijarse levas desplazables. Estoposibilita un control contínuo de la posición delrobot.
2.5 Limitación del campo de trabajo
Los rangos de movimiento de los ejes 1 hasta 3pueden, adicionalmente, de acuerdo con la tareaespecífica, ser equipados con topes mecánicosadicionales:
2.6 Juego de ajuste KTL
Para realizar el ajuste necesario del punto ceropara todos los ejes, puede utilizarse uncomparador electrónico perteneciente al juego deajuste KTL (fig. 2--3 y 3--8). Permite unamediciónrápida ymuy sencilla, y también un ajuste asistidopor ordenador; se recomienda adquirir esteaccesorio junto con el robot.
2.7 Medidor de la tensión mecánicade la correa para la muñecacentral
Este aparato de medición, con equipamientoelectrónico con microcontrolador, permite enforma sencilla y segura, la determinación de latensión en las correas dentadas por la mediciónde frecuencia (fig. 2--4).
2.8 Dispositivo de liberación paralos ejes del robot
Con este dispositivo, en caso de fallos, el robotpuede ser desplazado de forma mecánica através de los motores de accionamiento de losejes principales y los motores de accionamientode lamuñeca. Sólo debe ser utilizado en casos deemergencia (por ej. para liberar a personas).

10.03.02 Spez KR 30--3, KR 60--3 es 7
3 DATOS TECNICOS
Tipos KR 30--3KR 60--3KR 60 L45--3KR 60 L30--3KR 30 L16
Cantidad de ejes 6 (fig. 1--3)
Límites de carga (ver también fig. 3--1)
Tipo de robot KR 30--3 KR 60--3 KR 60 L45--3 KR 60 L30--3 KR 30 L16
Muñeca (MC)1 MC 30/45/601 MC 30/45/601 MC 30/45/601 MC 30/45/601 MC 16
Carga útil nominal [kg] 30 60 45 30 16
Carga adicional con lacarga útil nominal [kg]
35 35 35 35 35
Carga total max. [kg] 65 95 80 65 51
1 MC = muñeca central III
La dependencia de la carga útil y la posición delcentro de gravedad de la carga útil puedenconsultarse en las figuras 3--2 hasta 3--5.
Datos de los ejes
Los datos de los ejes se indicana continuación. Larepresentación de los ejes y sus posibilidades demovimiento pueden verse en la fig 1--3. Los ejesbase o principales son los ejes 1 hasta 3, los ejesde la muñeca son los ejes 4 hasta 6.
Todas las indicaciones en la línea “Rango demovimiento” hacen referencia a la posición ceroeléctrica y las indicaciones en la pantalla deldisplay del KCP para el correspondiente eje delrobot.
Repetibili-dad
KR 30--3 ±0,15 mmKR 60--3 ±0,20 mmKR 60 L45--3 ±0,25 mmKR 60 L30--3 ±0,25 mmKR 30 L16 ±0,20 mm
Sistema deacciona-miento
electromecánico, con servomo-tores de CA con mando transis-torizado
Medidasprincipales
ver fig. 3--9, 3--10
Peso KR 30--3 aprox. 635 kgKR 60--3 aprox. 635 kgKR 60 L45--3 aprox. 671 kgKR 60 L30--3 aprox. 679 kgKR 30 L16 aprox. 700 kg
Nivel deruido
<75 dB (A) fuera del campo detrabajo
Posición demontaje
Todos los tipos, excepto elKR1 30 L16:variable.KR 30 L16:Piso o techoEl rango de movimiento del eje1 depende del ángulo de mon-taje del robot(ver fig. 3--12 y 3--13)
Instalación ver apartado 1.3
Centro de gravedad de la carga P ver figuras3--2 hasta 3--5.
Para todas las cargas nominales, la distanciahorizontal (Lz) del centro de gravedad de la cargaP desde la superficie de la brida, es de 150 mm(distancia nominal).
La distancia vertical (Lxy) desde el eje de giro deleje 6 es de 120 mm (distancia nominal) para elKR 30 L16, y de 180mm (distancia nominal) paralos otros tipos de construcción.
Campo de trabajo (espacio de trabajo)
La forma y las medidas del campo de trabajopueden verse en las figuras 3--9 y 3--10.
Potencia de motor instaladaaprox. 14,9 kW

Spez KR 30--3, KR 60--3 es 10.03.028
KR 30--3Muñeca central, carga útil nominal 30 kg
Eje Rango de movimientolimitado por software
Velocidad
1 ±185˚ 140 ˚/s
2 +35˚hasta--135˚
140 ˚/s
3 +158˚hasta--120˚
140 ˚/s
4 ±350˚ 260 ˚/s
5 ±119˚ 245 ˚/s
6 ±350˚ 322 ˚/s
KR 60--3Muñeca central, carga útil nominal 60 kg
Eje Rango de movimientolimitado por software
Velocidad
1 ±185˚ 140 ˚/s
2 +35˚hasta--135˚
120 ˚/s
3 +158˚hasta--120˚
140 ˚/s
4 ±350˚ 260 ˚/s
5 ±119˚ 245 ˚/s
6 ±350˚ 322 ˚/s
KR 60 L45--3Muñeca central, carga útil nominal 45 kg
Eje Rango de movimientolimitado por software
Velocidad
1 ±185˚ 140 ˚/s
2 +35˚hasta--135˚
120 ˚/s
3 +158˚hasta--120˚
140 ˚/s
4 ±350˚ 260 ˚/s
5 ±119˚ 245 ˚/s
6 ±350˚ 322 ˚/s
KR 60 L30--3Muñeca central, carga útil nominal 30 kg
Eje Rango de movimientolimitado por software
Velocidad
1 ±185˚ 140 /̊s
2 +35˚hasta--135˚
120 /̊s
3 +158˚hasta--120˚
140 /̊s
4 ±350˚ 260 /̊s
5 ±119˚ 245 /̊s
6 ±350˚ 322 /̊s
KR 30 L16Muñeca central, carga útil nominal 16 kg
Eje Rango de movimientolimitado por software
Velocidad
1 ±185˚ 100 /̊s
2 +35˚hasta--135˚
80 ˚/s
3 +158˚hasta--120˚
80 ˚/s
4 ±350˚ 230 /̊s
5 ±130˚ 165 /̊s
6 ±350˚ 249 /̊s

10.03.02 Spez KR 30--3, KR 60--3 es 9
Volumen del espacio de trabajoEl volumen del espacio de trabajo es, para el tipo
KR 30--3 aprox. 27,2 m3
KR 60--3 aprox. 27,2 m3
KR 60 L45--3 aprox. 36,9 m3
KR 60 L30--3 aprox. 47,8 m3
KR 30 L16 aprox. 104,5 m3
El punto de referencia es aquí la intersección delos ejes 4 y 5.
Temperatura ambiente
D en servicio:283 K hasta 328 K (+10 �C hasta +55 �C)
D en almacén o para transporte:233 K hasta 333 K (--40 �C hasta +60 �C)
Otros límites de temperatura deben consultarse.
Tipo de protección del robot IP 64
(según EN 60529)preparado para el servicio, con los cables deunión conectados
Tipo de protecciónde la muñeca central IP 65
(Estándar)
Tipo de protecciónde la muñeca central IP 67
(Variante F)
Carga sobre la muñeca central “F”
Carga de temperatura10 s/min con 453 K (180 �C)
Temperatura superficial373 K (100 �C)
Resistente contra:-- altas concentraciones de polvo-- lubricantes y medios de refrigeración-- vapor de agua
Color
Base del robot (parte fija), negro (RAL 9005)Partes móviles, naranja (RAL 2003)En la “Variante F” pintura especial adicional.
Muñeca central “F”:Pintado resistente al calor y pintura especialreflectante al calor en plata.
Equipamiento especial en la “Variante F”
Brazo bajo presión internaSobrepresión en el brazo: 0,1 barCaudal de aire necesario: aprox. 0,1 m3/h
libre de aceite y aguaRosca de conexión: M5Reductor de presión: 0,1 -- 0,7 barManómetro: 0 -- 1 barFiltro: 25 -- 30 µm
Brida de acople al eje 6
La brida de acople se entrega en versiónDIN/ISO1 (fig. 3--6, 3--7).Calidad de los tornillos para montaje de útiles 10.9Longitud de apriete min. 1,5 x dProfundidad de enroscado MC 16 min. 6 mm
max. 9 mmProfundidad de enroscadoMC 30/45/60 min. 12 mm
max. 14 mm
OBSERVACION: La representación de la bridaen la figura corresponde a la posicióncero de todos los ejes, en especial enel eje 6 (el símbolo indica laposición correspondiente delelemento de ajuste, ver fig. 3--6, 3--7).
1 DIN/ISO 9409--1--A100 para MC 30/45/60 kgDIN/ISO 9409--1--A50 para MC 16 kg

Spez KR 30--3, KR 60--3 es 10.03.0210
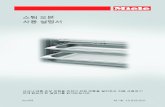
1--2 Muñeca central (MC)
1 Muñeca2 Brazo3 Brazo de oscilación4 Columna giratoria5 Base del robot
1--1 Componentes principales del robot
30 kg
1
2
3
1--3 Ejes de rotación y sentido de giro enel desplazamiento del robot
4
45 kg
KR 30--3KR 60--3KR 60 L45--3 (no representado)
KR 60 L30--3 (no representado)
KR 30 L16 (no representado)
5
A1
16 kg
60 kg

10.03.02 Spez KR 30--3, KR 60--3 es 11
660+5
(147.5)
(255,5)
(511)
30�
120�3x 120� (=360�)
H712
1
A
min.30
max.4
H712
B0,1 A
1
4
2
590
3
16�
410--5
1--4
1 Perno de apoyo largo2 Robot3 Tornillo de cabeza hexagonal4 Perno de recepción corta
Fijación del robot, variante 1 (juego de fijación sobre una base demáquina)

Spez KR 30--3, KR 60--3 es 10.03.0212
1--5
1 Anclajes compuestos2 Perno de apoyo largo3 Tornillo de cabeza hexagonal4 Placa intermedia5 Perno de recepción corta
Fijación del robot, variante 2 (juego de fijación sobre el fundamento)
B
303
361
175
316
175 6
310
186
B
350
A A
1 2 3 4
Corte A -- A
3
5
1
Corte B -- B, 120� girado
4

10.03.02 Spez KR 30--3, KR 60--3 es 13
1--6 Fijación del robot, variante 3 (adaptador de placa)
1
1212
1 Tornillo de cabeza hexagonal (fijación placa intermedia)2 Tornillo de cabeza hexagonal (fijación robot)
0,1 B CH730
220
780
0,3 A
(4x)
300
850
950
790
(8x)
26
830
220
H730
0,5
A
0,6 A B C
H7
12
2x
390
B
300 (4x)
8�
16�
30 ± 0,2
M20 (6x)
0,1 B C
0,6 B CA2
A
120˚
120˚
590˚
490˚

Spez KR 30--3, KR 60--3 es 10.03.0214
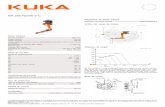
1--7 Carga principal actuante sobre el fundamento por el robot y la carga total
Fv = Fuerza vertical Fv max = 13 600 NFh = Fuerza horizontal Fh max = 12 300 NMk = Momento de vuelco Mk max = 21 000 NmMr = Momento de giro alrededor
del eje 1 Mr max = 18 400 Nm
Masa total = Robot + Carga total para tipo
635 kg + 65 kg KR 30--3635 kg + 95 kg KR 60--3671 kg + 80 kg KR 60 L45--3679 kg + 65 kg KR 60 L30--3700 kg + 51 kg KR 30 L16
Fv
Fh
Mk
Mr
Vista X
X

10.03.02 Spez KR 30--3, KR 60--3 es 15
Vista X
1--8 Carga principal actuante sobre el fundamento por el robot y la carga total para posiciónde montaje contra la pared
Fv = Fuerza vertical Fv max = 12 700 NFh = Fuerza horizontal Fh max = 10 200 NMk = Momento de vuelco Mk max = 18 900 NmMr = Momento de giro alrededor
del eje 1 Mr max = 15 800 Nm
Masa total = Robot + carga total para tipo
635 kg + 65 kg KR 30--3635 kg + 95 kg KR 60--3671 kg + 80 kg KR 60 L45--3679 kg + 65 kg KR 60 L30--3
X
Fv
Fh
Mk
Mr

Spez KR 30--3, KR 60--3 es 10.03.0216
1--10 Medidas del robot en posición de transporte
1--9 Transporte del robot
200
663
568
87,4
792
560
100
187,4
622
688
31
122,5
27
117,5

10.03.02 Spez KR 30--3, KR 60--3 es 17
2--4 Medidor de la tensión mecánica de lcorrea para la muñeca central
3--1 Distribución de las cargas
2--2
Carga adicional Carga útil
Carga total max.
2--3 Comparador electrónico parael juego de ajuste KTL
2--1 Eje lineal adicional
P
Alimentación de energía A 1 hasta A 3

Spez KR 30--3, KR 60--3 es 10.03.0218
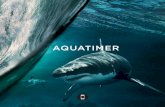
3--2 Centro de gravedad de la carga P y curvas características para KR 30--3 y KR 60 L30--3
ATENCION:Estas curvas características de carga y los valores en la tabla, corresponden a lacarga máxima admisible (carga y momento de inercia)! Exceder esta capacidad decarga reduce la vida útil del aparato, sobrecarga en general los motores y reduc-tores y, en todos los casos, es necesario una consulta con la firma KUKA.
OBSERVACION:Los valores determinados aquí son necesarios para la planificación de la aplicación delrobot. Para la puesta en servicio del robot se necesitan, además, datos de entrada adicio-nales en concordancia con la documentación software de KUKA.
Sistema de coordenadas de la brida del robot
--X
Lz
Lx
Ly
+X--Y
+Y
+Z
--Z
Centro de gravedad de lacarga P
Lxy= L x2+ Ly2
Lxy
Inercia de masa permitida en el punto de aplica-ción (Lxy = 230 mm, Lz = 210 mm) 9 kgm2.
ATENCION: las inercias de masa deben sercalculadas con KUKA Load. ¡Es absoluta-mente necesario efectuar la declaración delos datos de carga en la unidad de control!
Lxy (mm)
100 200 300 400 500 700600
100
200
300
400
Lz (mm)
500
A 4
A 5
A 6
KR 30--3KR 60 L30--3
30 kg27 kg
24 kg
21 kg
18 kg
15 kg
13 kg

10.03.02 Spez KR 30--3, KR 60--3 es 19
3--3 Centro de gravedad de la carga P y curvas características para KR 60--3
ATENCION:Estas curvas características de carga y los valores en la tabla, corresponden a lacarga máxima admisible (carga y momento de inercia)! Exceder esta capacidad decarga reduce la vida útil del aparato, sobrecarga en general los motores y reduc-tores y, en todos los casos, es necesario una consulta con la firma KUKA.
Sistema de coordenadas de la brida del robot
--X
Lz
Lx
Ly
+X--Y
+Y
+Z
--Z
Centro de gravedad de lacarga P
Lxy= L x2+ Ly2
Lxy
Lxy (mm)
100 200 300 400 500 700600
100
200
300
400
Lz (mm)
500
A 4
A 5
A 6
KR 60--3
60 kg55 kg
35 kg
50 kg45 kg
40 kg
25 kg
30 kg
25 kg
OBSERVACION:Los valores determinados aquí son necesarios para la planificación de la aplicación delrobot. Para la puesta en servicio del robot se necesitan, además, datos de entrada adicio-nales en concordancia con la documentación software de KUKA.
Inercia de masa permitida en el punto deaplicación (Lxy = 180 mm, Lz = 150 mm)18 kgm2.
ATENCION: las inercias de masa debenser calculadas con KUKA Load. ¡Es ab-solutamente necesario efectuar la de-claración de los datos de carga en launidad de control!

Spez KR 30--3, KR 60--3 es 10.03.0220
3--4 Centro de gravedad de la carga P y curvas características para KR 60 L45--3
Sistema de coordenadas de la brida del robot
--X
Lz
Lx
Ly
+X--Y
+Y
+Z
--Z
Centro de gravedad de lacarga P
Lxy= L x2+ Ly2
Lxy
Lxy (mm)
100 200 300 400 500 700600
100
200
300
400
Lz (mm)
500
A 4
A 5
A 6
KR 60 L45--3
45 kg41 kg37 kg33 kg
29 kg
25 kg
21 kg
ATENCION:Estas curvas características de carga y los valores en la tabla, corresponden a lacarga máxima admisible (carga y momento de inercia)! Exceder esta capacidad decarga reduce la vida útil del aparato, sobrecarga en general los motores y reduc-tores y, en todos los casos, es necesario una consulta con la firma KUKA.
OBSERVACION:Los valores determinados aquí son necesarios para la planificación de la aplicación delrobot. Para la puesta en servicio del robot se necesitan, además, datos de entrada adicio-nales en concordancia con la documentación software de KUKA.
Inercia de masa permitida en el punto deaplicación (Lxy = 180 mm, Lz = 150 mm)13,5 kgm2.
ATENCION: las inercias de masa debenser calculadas con KUKA Load. ¡Es ab-solutamente necesario efectuar la de-claración de los datos de carga en launidad de control!

10.03.02 Spez KR 30--3, KR 60--3 es 21
3--5 Centro de gravedad de la carga P y curvas características para KR 30 L16
Sistema de coordenadas de la brida del robot
--X
Lz
Lx
Ly
+X--Y
+Y
+Z
--Z
Lxy= L x2+ Ly2
Lxy
Lxy (mm)
100 200 300 400 500 600
100
200
300
Lz (mm)
10 kg
12 kg14 kg
8 kg
16 kg
KR 30 L16A 4
A 5
A 6
Centro de gravedad de lacarga P
3--4 Centro de gravedad de la carga P y curvas características para KR 60 L45--3
OBSERVACION:Los valores determinados aquí son necesarios para la planificación de la aplicación delrobot. Para la puesta en servicio del robot se necesitan, además, datos de entrada adicio-nales en concordancia con la documentación software de KUKA.
ATENCION:Estas curvas características de carga y los valores en la tabla, corresponden a lacarga máxima admisible (carga y momento de inercia)! Exceder esta capacidad decarga reduce la vida útil del aparato, sobrecarga en general los motores y reduc-tores y, en todos los casos, es necesario una consulta con la firma KUKA.
Inercia de masa permitida en el punto deaplicación (Lxy = 120 mm, Lz = 150 mm)0,36 kgm2.
ATENCION: las inercias de masa debenser calculadas con KUKA Load. ¡Es ab-solutamente necesario efectuar la de-claración de los datos de carga en launidad de control!

Spez KR 30--3, KR 60--3 es 10.03.0222
3--7 Brida de montaje DIN/ISO para MC 30/45/60 kg
ø100
ø125
ø63H7
170
A A
Xm
Ø 0,04
A
B
h8
Ø 0,02 B
A B
8,5+0,30
7,5¦0,1
Tornillos de fijación M8, calidad 10.9Profundidad de roscado: min. 12 mm, max. 14 mm
hasta A4/A5
Ø 8H78 prof.
Vista A--A
6,5tief
3--6 Brida de montaje DIN/ISO para MC 16 kg
hasta A4/A5
Tornillos de fijación M6, calidad 10.9Profundidad de roscado: min. 6 mm,max. 9mm
6x
158
A
0,02 A
Longitud de ajuste
6
78
H7
31.5 h7
63
0,1 A B
M6
6.3
154
0,04 A B
204
H768x 45� = 360�
45�
50
50
Vista A--A
A
A
Xm
12

10.03.02 Spez KR 30--3, KR 60--3 es 23
3--8
Para el ajuste del punto cero con el comparador electrónico (ver secc. 2.6) estandoel útil o herramientamontado, el conjunto debe estar diseñado demodo tal de te-ner lugar suficiente para montar y desmontar el comparador.
30/45/60 kg
A 4
A 5
A 6
66 94
95
221
15˚
Comparador electrónico, montaje sobre A4, A5 y A6 con posición mecánica cero deA4 hasta A6
7570
25
60
R215,5
R214 20
R230,5
16 kg

Spez KR 30--3, KR 60--3 es 10.03.0224
OBSERVACION: el centro de gravedadde la carga adicional estarlo más cercaposible del eje de giro 3 y de la linea a enla fig. 3--11. El punto de referencia para elcampo de trabajo es la intersección de losejes 4 y 5. Vista Y ver figura 3--11.
3--9Dimensiones principales y campo de trabajo (referidos al software)KR 30--3, KR 60--3, KR 60 L45--3, KR 60 L30--3
D
180
150
850
A
F
E
350
815
C
B
Carga adicional
145 G
Centro de gravedadde la carga P
170
---185˚
+185˚
181
A B C D E F G
KR 30--3 2498 3003 2033 1218 815 1084 820KR 60--3 2498 3003 2033 1218 815 1084 820KR 60 L45--3 2695 3398 2233 1362 868 1283 1020KR 60 L30--3 2894 3795 2429 1445 983 1480 1220
C
Radio del canto de perturba-ción de la brida de montaje
---120˚ +158˚
---135˚
+35˚ Radio del canto de per-turbación de la brida demontaje
Y

10.03.02 Spez KR 30--3, KR 60--3 es 25
2050
1425
1200
350
815
145
4992
3567
3102R
3102
2017
--
150
120
158
1085
5152
--120� +158�
--135�
+35�
+185�
--185�
1545
OBSERVACION: el centro de gravedad dela carga adicional estarlomás cerca posibledel eje de giro 3 y de la linea a en la fig. 3--11.El punto de referencia para el campo de tra-bajo es la intersección de los ejes 4 y 5. Vi-sta Y ver figura 3--11.
3--10Dimensiones principales y campo de trabajo (referidos al software)KR 30 L16
Carga adicional Centro de gravedadde la carga PY
Radio del canto de perturbaciónde la brida de montaje

Spez KR 30--3, KR 60--3 es 10.03.0226
Vista Y ver figura 3--9 y 3--10
3--11 Perforaciones de fijación para la carga adicional brazo
114
160
375
195
CentroA3
82M8, 16 prof. 16Tornillos de fijación M8, 8.8, min. prof. de enroscado min. >1x d
Apoyo para la carga adicional (2x)Medida máxima para la carga adicional

10.03.02 Spez KR 30--3, KR 60--3 es 27
±80˚
±90˚
±70˚
±60˚
±50˚
±40˚
±30˚
±20˚
±10˚
±0˚90˚ 80˚ 70˚ 60˚ 50˚ 40˚ 30˚ 20˚ 10˚ 0˚
3--13 Restricciones del rango de movimiento del eje 1 dependiendo del ángulo demontaje del KR 60--3, KR 60 L45--3 und KR 60 L30--3
Rangodemovimiento
eje1
(Pared) (Piso)
±80˚
±90˚
±70˚
±60˚
±50˚
±40˚
±30˚
±20˚
±10˚
±0˚
Rangodemovimiento
eje1
90˚ 80˚ 70˚ 60˚ 50˚ 40˚ 30˚ 20˚ 10˚ 0˚
Angulo en el piso(Pared) (Piso)
3--12 Restricciones del rango de movimiento del eje 1 dependiendo del ángulo demontaje del KR 30--3
Angulo en el piso

KUKA Automatisering+ Robots N.V.Centrum Zuid 1031B--3530 HouthalenTel.: +32 11 516160E--Mail: [email protected]
KUKA Sistemas deAutomatización, S.A.Pol. Industrial Torrent de la PasteraCarrer del Bages s/nE--08800 Vilanova i la GeltrúTel.: +34 93 8142353E--Mail: [email protected]
KUKA Robotics Corp.22500 Key DriveClinton TownshipMichigan 48036 USATel.: +1 866 873--5852E--Mail: [email protected]
Robots industrialesH Robots articulados para cargasútiles comprendidas entre 3 y 500kg
H Unidades linealesH Unidades de controlH Desarrollos de softwareH Entrenamiento técnico, servicio alcliente
Direcciones
Gama de productos
KUKA Welding Systems+ Robot Ltd.Hereward Rise HalesowenUK--West Midlands B62 8AN GBTel.: +44 121 5850800E--Mail: [email protected]
KUKA Robot AutomationKorea Co. Ltd.4 Ba 806 Sihwa Ind. Complex,Sung--Gok Dong, Ansan City,Kyunggi Do, 425--110 KoreaTel.: +82 31 4969937E--Mail: [email protected]
Datos técnicos y figuras sin compromiso para el suministro.Reservados los derechos a modificaciones técnicas.
Entregado por
KUKA Roboter GmbHGlobal Sales CenterHery--Park 3000D--86368 GersthofenTel.: +49 821 4533--0Fax: +49 821 4533--1616E--Mail: [email protected]: http://www.kuka--roboter.de
KUKA Roboter Italia S.p.A.Via Pavia 9/a -- int.6I--10098 Rivoli (TO)Tel.: +39 011 9595013 r.a.E--Mail: [email protected]
KUKA Roboter GmbH
KUKA Svetsanläggningar+ Robotar ABA. Odhners gata 15S--42130 Västra FrölundaTel.: +46 31 7266200E--Mail: [email protected]
KUKA Roboter do Brasil Ltda.Rua Dom Feliciano N˚ 63Cidade Satélite, GuarulhosCEP 07224 240São Paulo, SP, BrasilTel.: +55 11 6413--4900E--Mail: [email protected]
KUKA de México S. de R.L. de C.V.Rio San Joaquin # 339, Local 5Col. Pensil SurMéxico, D.F. C.P. 11490Tel.: +52 55 52038407E--Mail: [email protected]
D
KUKA Roboter Schweiz AGRiedstrasse 7CH--8953 DietikonTel.: +41 17 449090E--Mail: [email protected]
I
MEX
ROK
S
UK
USA
B
BR
CH
E
AKUKA Roboter GmbHVertriebsbüro ÖsterreichRegensburger Strasse 9/1A--4020 LinzTel.: +43 732 784752E--Mail: [email protected]
KUKA Robotics Hungária Kft.2335 Taksony, Fö út 140HungáriaTel.: +36 24 501609E--Mail: [email protected]
H
KUKA Robot AutomationSdn Bhd South East AsiaRegional OfficeNo. 24, Jalan TPP 1/10Taman Industri Puchong47100 Puchong, Selangor, MalaysiaTel.: +60 3 8061--0613E--Mail: [email protected]
MAL
KUKA Sistemas de AutomatizaciónS.A. (Sucursal em Portugal)Urb. Vale do Alecrim, Lote 115 BP--2950 PalmelaTel.: +3 51 21 2388083E--Mail: [email protected]
P
KUKA Automation Equipment(Shanghai) Co., Ltd.Part B, Ground Floor, No. 211Fu te Road (North)Waigaoqiao Free Trade ZoneShanghai 200 131, ChinaTel.: +86 21 58665139E--Mail: [email protected]
PRC
KUKA Automatisme+ Robotique SASTechvallée, 6 Avenue du ParcF--91140 Villebon S/YvetteTel.: +33 1 69316600E--Mail: [email protected]
F
KUKA Robot Automation Sdn BhdThailand Officec/o Maccall System Co., Ltd.49/9--10 Soi Kingkaew 30,Kingkaew RoadT. Rachatheva, A. BangpliSamutprakarn, 10540 ThailandTel.: +66 2 7502737E--Mail: [email protected]
THA
KUKA Robot AutomationTaiwan Co. Ltd.136, Section 2,Huanjung East RoadJungli City, Taoyuan, Taiwan 320Tel.: +886 3 4371902E--Mail: [email protected]
TWN
KUKA Roboter GmbHNiederlassung NordVW--Werk, Halle 4,Eingang 22,Berliner RingD--38436 WolfsburgTel.: +49 5361 848481--0Fax: +49 5361 848481--26
KUKA Roboter GmbHNiederlassung WestDortmunder Straße 15D--57234 WilnsdorfTel.: +49 2739 4779--0Fax: +49 2739 4779--29E--Mail: [email protected]
NKUKA Svetsanläggningar+ Robotar AB Avd. NorwayHadelandsveien 2, Postbox 17NO--2801 Gjövik, NorwayTel.: +47 61 133422E--Mail: [email protected]
Top Related