







Idiomas
Páginas
Jurídico


GUÍA DE APRENDIZAJESISTEMAS DE CONTROL
Datos Descriptivos
TITULACIÓN: GRADO EN INGENIERIA DECOMPUTADORES
CENTROS IMPLICADOS: E.U. DE INFORMATICA
CICLO: Grado sin atribucionesMÓDULO:MATERIA: Optativa
ASIGNATURA: SISTEMAS DE CONTROLCURSO: 4 º
SEMESTRE: Semestre 2º (Febrero-Junio)DEPARTAMENTO RESPONSABLE: INFORMATICA APLICADA
CRÉDITOS EUROPEOS: 6CARÁCTER: OPTATIVA
CURSO ACADÉMICO: 2011/2012PERIODO DE IMPARTICIÓN: Semestre 2º (Febrero-Junio)
Datos ComunesITINERARIO:
IDIOMAS IMPARTICIÓN: EspañolOTROS IDIOMAS IMPARTICIÓN:
HORAS/CRÉDITO: 26

ProfesoradoCOORDINADOR: NORBERTO CAÑAS DE PAZ
NOMBRE DESPACHO EMAIL EN INGLÉSNORBERTO CAÑAS DE PAZ 4418 [email protected] No
(*) Profesores externos en cursiva.
TutoríasTUTORÍASNOMBRE Lugar Día De A
Grupos
Nº de gruposTeoría 1
Prácticas 1GRUPOS ASIGNADOS EN:Laboratorio 0

Requisitos previos necesariosASIGNATURAS SUPERADAS
OTROS REQUISITOS
Conocimientos previos recomendadosASIGNATURAS PREVIAS RECOMENDADAS
CONOCIMIENTOS PREVIOS
OTROS CONOCIMIENTOS
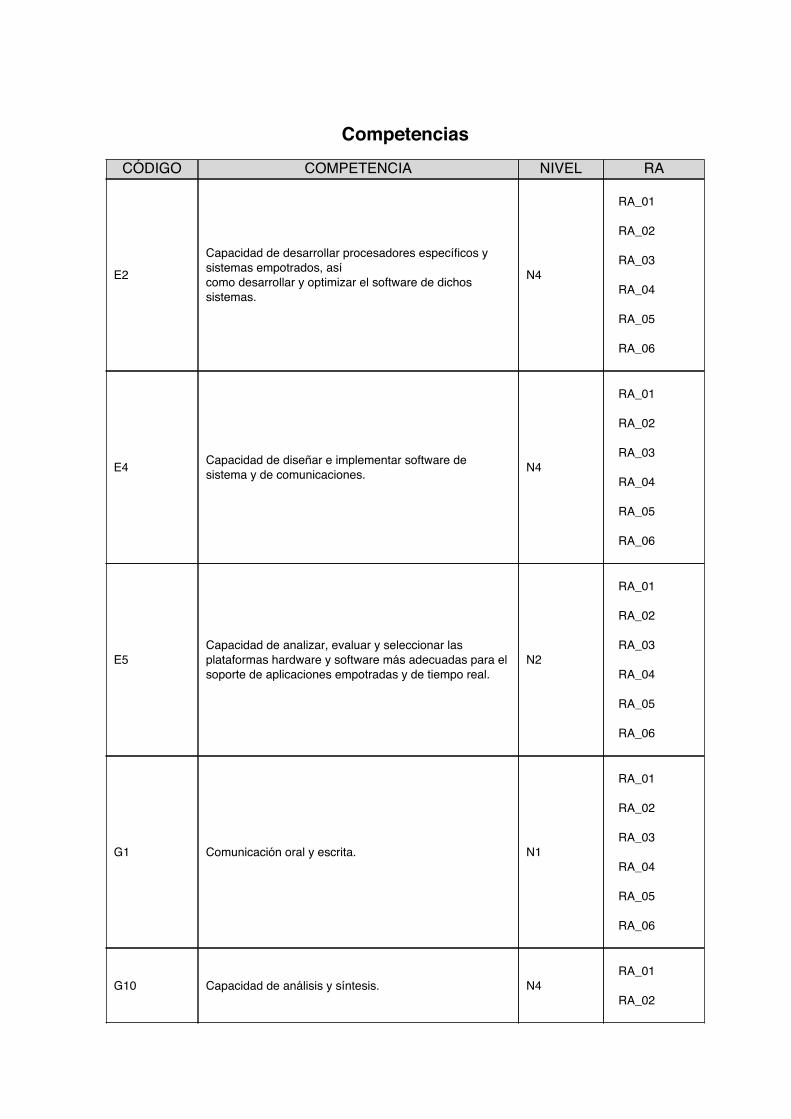
CompetenciasCÓDIGO COMPETENCIA NIVEL RA
E2
Capacidad de desarrollar procesadores específicos ysistemas empotrados, asícomo desarrollar y optimizar el software de dichossistemas.
N4
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
E4 Capacidad de diseñar e implementar software desistema y de comunicaciones. N4
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
E5Capacidad de analizar, evaluar y seleccionar lasplataformas hardware y software más adecuadas para elsoporte de aplicaciones empotradas y de tiempo real.
N2
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
G1 Comunicación oral y escrita. N1
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
G10 Capacidad de análisis y síntesis. N4RA_01
RA_02

RA_03
RA_04
RA_05
RA_06
G13 Razonamiento crítico. N3RA_01
RA_06
G14 Resolución de problemas. N4
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
G2 Creatividad. N3RA_01
RA_06
G4 Organización y planificación. N2
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
G8 Trabajo en equipo. N3
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
G9 Aprendizaje autónomo. N1RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
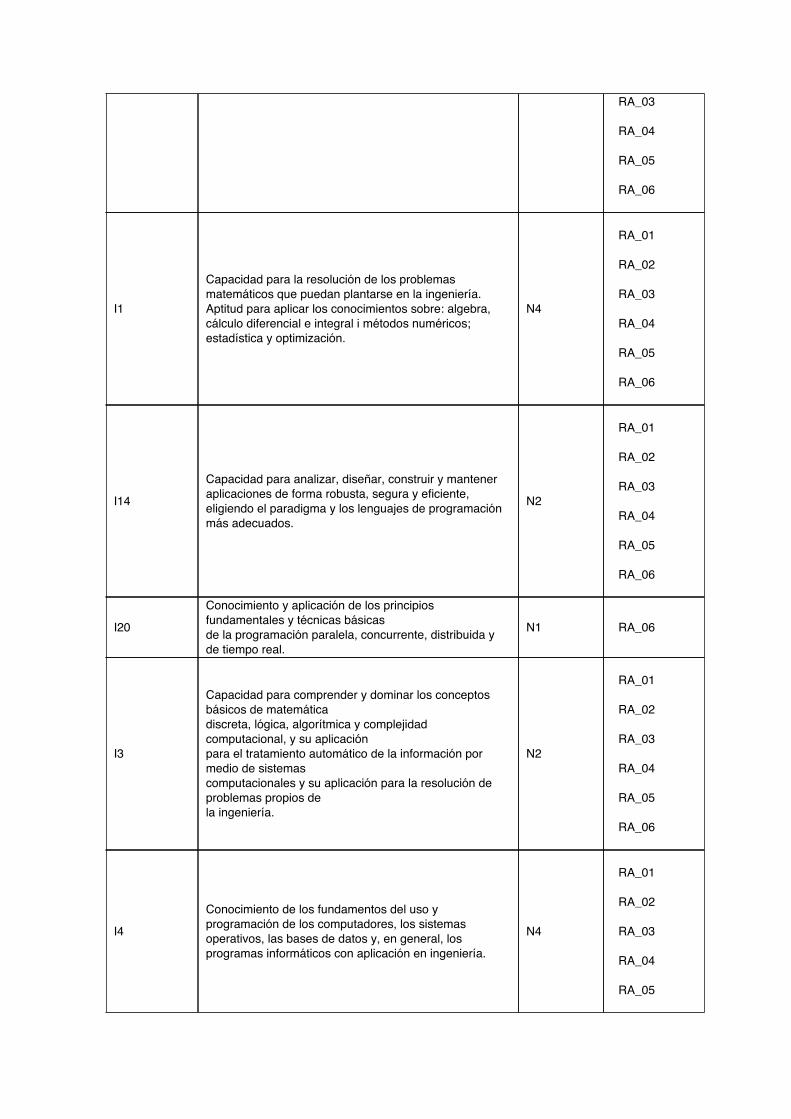
I1
Capacidad para la resolución de los problemasmatemáticos que puedan plantarse en la ingeniería.Aptitud para aplicar los conocimientos sobre: algebra,cálculo diferencial e integral i métodos numéricos;estadística y optimización.
N4
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
I14
Capacidad para analizar, diseñar, construir y manteneraplicaciones de forma robusta, segura y eficiente,eligiendo el paradigma y los lenguajes de programaciónmás adecuados.
N2
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
I20
Conocimiento y aplicación de los principiosfundamentales y técnicas básicasde la programación paralela, concurrente, distribuida yde tiempo real.
N1 RA_06
I3
Capacidad para comprender y dominar los conceptosbásicos de matemáticadiscreta, lógica, algorítmica y complejidadcomputacional, y su aplicaciónpara el tratamiento automático de la información pormedio de sistemascomputacionales y su aplicación para la resolución deproblemas propios dela ingeniería.
N2
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
I4
Conocimiento de los fundamentos del uso yprogramación de los computadores, los sistemasoperativos, las bases de datos y, en general, losprogramas informáticos con aplicación en ingeniería.
N4
RA_01
RA_02
RA_03
RA_04
RA_05

RA_06
I7
Capacidad para diseñar, desarrollar, seleccionary evaluar aplicaciones y sistemas informáticos,asegurando su fiabilidad, seguridad y calidad, conformea principios éticos y a la legislación y normativa vigente.
N2
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06

Resultados de aprendizajeCÓDIGO DESCRIPCIÓN
RA_01El alumno es capaz de entender, plantear y simplificar el diagrama de bloques de loscomponentes de un sistema de una sola variable de entrada y una sola variable de salida(SISO), lineal e invariantes en el tiempo (LTI).
RA_02El alumno es capaz de obtener la función de transferencia en el plano de Laplace y Z paracomponentes, cuyo comportamiento pueda describirse con ecuaciones diferenciales, ensistemas SISO y LTI.
RA_03 El alumno es capaz de realizar el análisis de estabilidad para sistemas SISO y LTI.
RA_04 El alumno es capaz de analizar el comportamiento transitorio de sistemas de primer ysegundo orden con coeficientes constantes.
RA_05 El alumno es capaz de analizar el comportamiento en régimen permanente de sistemasSISO y LTI.
RA_06 El alumno puede diseñar sistemas de control para plantas SISO y LTI.
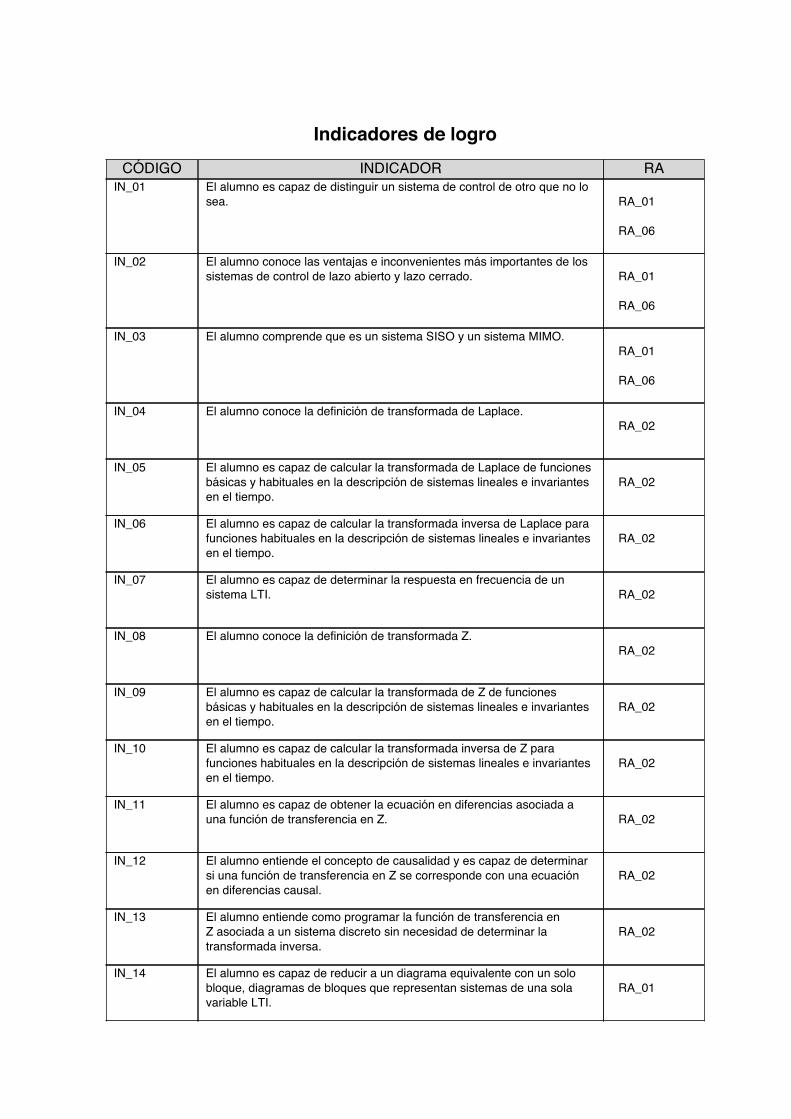
Indicadores de logroCÓDIGO INDICADOR RA
IN_01 El alumno es capaz de distinguir un sistema de control de otro que no losea. RA_01
RA_06
IN_02 El alumno conoce las ventajas e inconvenientes más importantes de lossistemas de control de lazo abierto y lazo cerrado. RA_01
RA_06
IN_03 El alumno comprende que es un sistema SISO y un sistema MIMO.RA_01
RA_06
IN_04 El alumno conoce la definición de transformada de Laplace.RA_02
IN_05 El alumno es capaz de calcular la transformada de Laplace de funcionesbásicas y habituales en la descripción de sistemas lineales e invariantesen el tiempo.
RA_02
IN_06 El alumno es capaz de calcular la transformada inversa de Laplace parafunciones habituales en la descripción de sistemas lineales e invariantesen el tiempo.
RA_02
IN_07 El alumno es capaz de determinar la respuesta en frecuencia de unsistema LTI. RA_02
IN_08 El alumno conoce la definición de transformada Z.RA_02
IN_09 El alumno es capaz de calcular la transformada de Z de funcionesbásicas y habituales en la descripción de sistemas lineales e invariantesen el tiempo.
RA_02
IN_10 El alumno es capaz de calcular la transformada inversa de Z parafunciones habituales en la descripción de sistemas lineales e invariantesen el tiempo.
RA_02
IN_11 El alumno es capaz de obtener la ecuación en diferencias asociada auna función de transferencia en Z. RA_02
IN_12 El alumno entiende el concepto de causalidad y es capaz de determinarsi una función de transferencia en Z se corresponde con una ecuaciónen diferencias causal.
RA_02
IN_13 El alumno entiende como programar la función de transferencia enZ asociada a un sistema discreto sin necesidad de determinar latransformada inversa.
RA_02
IN_14 El alumno es capaz de reducir a un diagrama equivalente con un solobloque, diagramas de bloques que representan sistemas de una solavariable LTI.
RA_01

IN_15 El alumno es capaz de plantear el diagrama de bloques de un sistemade una sola variable LTI a partir de su especificación con ecuacionesdiferenciales o en diferencias.
RA_01
IN_16 El alumno es capaz de analizar el comportamiento transitorio desistemas de primer y segundo orden discretos. RA_04
IN_17 El alumno es capaz de obtener un modelo de primer o segundo ordenque respete un determinado comportamiento transitorio. RA_04
IN_18 El alumno es capaz de determinar si un sistema, continuo o discreto, esestable a partir de la ubicación de sus polos. RA_03
RA_05
IN_19 El alumno es capaz de determinar el error en régimen permanente de unsistema continuo o discreto. RA_03
RA_05
IN_20 El alumno es capaz de realizar un análisis de sensibilidad relativo a lavariación de coeficientes de la función de transferencia de un sistema. RA_03
RA_05
IN_21 El alumno comprende y sabe utilizar alguna herramienta de simulaciónde sistemas. RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
IN_22 El alumno comprende y sabe utilizar alguna herramienta de cálculosimbólico. RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
IN_23 El alumno conoce las características de mérito que deben tener losentornos de desarrollo, los lenguajes de programación, los micro-núcleosy sistemas operativos, para facilitar el desarrollo de sistemas de control.
RA_01
RA_02
RA_03
RA_04
RA_05
RA_06
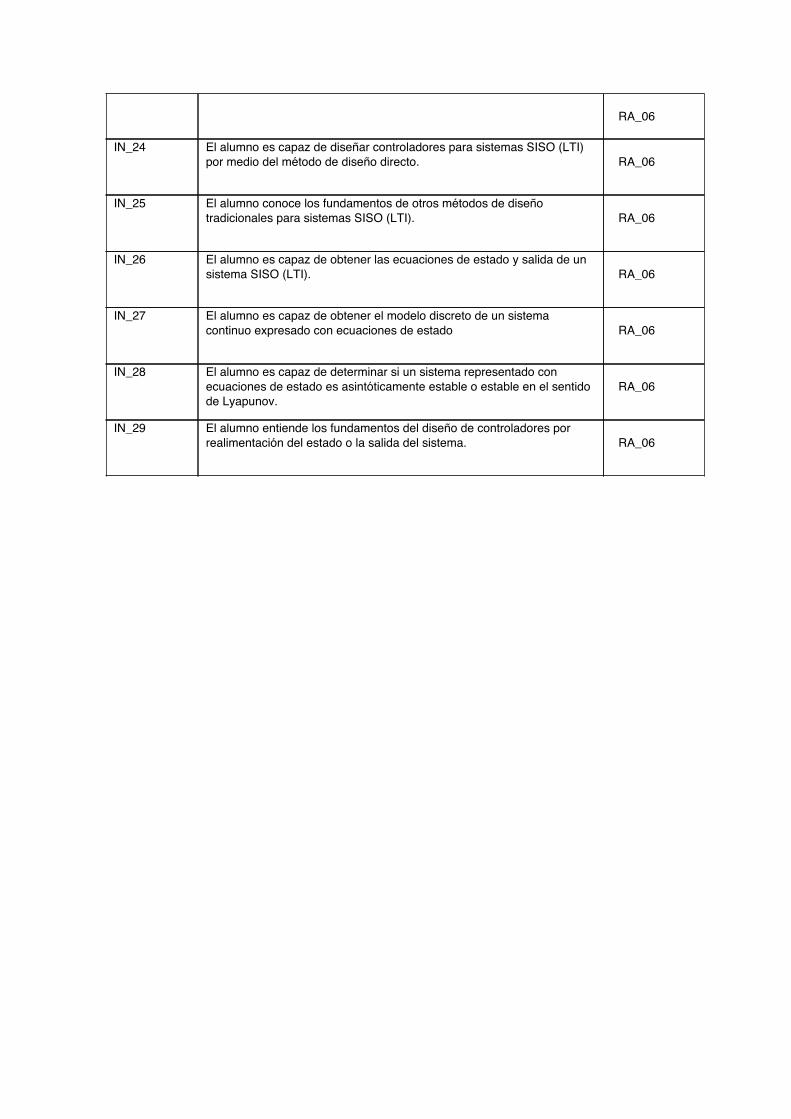
IN_24 El alumno es capaz de diseñar controladores para sistemas SISO (LTI)por medio del método de diseño directo. RA_06
IN_25 El alumno conoce los fundamentos de otros métodos de diseñotradicionales para sistemas SISO (LTI). RA_06
IN_26 El alumno es capaz de obtener las ecuaciones de estado y salida de unsistema SISO (LTI). RA_06
IN_27 El alumno es capaz de obtener el modelo discreto de un sistemacontinuo expresado con ecuaciones de estado RA_06
IN_28 El alumno es capaz de determinar si un sistema representado conecuaciones de estado es asintóticamente estable o estable en el sentidode Lyapunov.
RA_06
IN_29 El alumno entiende los fundamentos del diseño de controladores porrealimentación del estado o la salida del sistema. RA_06

Contenidos específicos (temario)TEMA /
CAPÍTULOAPARTADO
DIAGRAMAS DEBLOQUES Definiciones.
IN_14
IN_15
Teoremas de transformación.IN_14
IN_15
Reglas de reducción.IN_14
IN_15
HERRAMIENTASY ENTORNOS DEDESARROLLOPARA SISTEMAS DECONTROL
Herramientas de simulación.IN_21
Herramientas de cálculo simbólico.IN_22
Entornos de programación.IN_23
INTRODUCCIÓNDefinición de sistema de control.
IN_01
Sistemas de lazo abierto y sistemasde lazo cerrado. IN_02
Sistemas SISO Y SISTEMAS MIMO.IN_03
Clasificación de estrategias de control.IN_01
IN_02
IN_03

INTRODUCCIÓNA SISTEMASDE CONTROLMULTIVARIABLE
Representación en espacio deestados. IN_26
Obtención de ecuaciones de estado ysalida de sistemas SISO (LTI) a partirde la función de transferencia.
IN_26
IN_27
Solución de la ecuación de estado desistemas lineales continuos. IN_26
Solución de la ecuación de estado desistemas lineales discretos. IN_26
IN_27
Teorema de Cayley-Hamilton.IN_26
IN_27
Modelo discreto de un sistemacontinuo en espacio de estados. IN_26
IN_27
Estabilidad asintótica.IN_28
Estabilidad en el sentido de Lyapunov.IN_28
Controlabilidad y observabilidad desistemas multivariables y LTI IN_26
IN_27
IN_29
Diseño de controladores MIMO parasistemas LTI por realimentación delestado y realimentación de la salida.
IN_29
Introducción a otros métodos decontrol de sistemas MIMO. IN_29

MÉTODOS DEDISEÑO DESISTEMAS DECONTROL PARASISTEMAS SISO(LTI).
Diseño directo.IN_24
Introducción a métodos clásicos decontrol para sistemas SISO (LTI). IN_25
REGIMENPERMANENTEDE SISTEMASDISCRETOS
Estabilidad.IN_18
Error.IN_19
Sensibilidad.IN_20
REGIMENTRANSITORIODE SISTEMASDISCRETOS
Sistemas de primer orden.IN_16
IN_17
Sistemas de segundo orden.IN_16
IN_17
TRANSFORMADADE LAPLACE Definición.
IN_04
Propiedades.IN_04
IN_05
Tablas de transformadas.IN_05
Transformada inversa.IN_06
Respuesta en frecuencia.IN_07
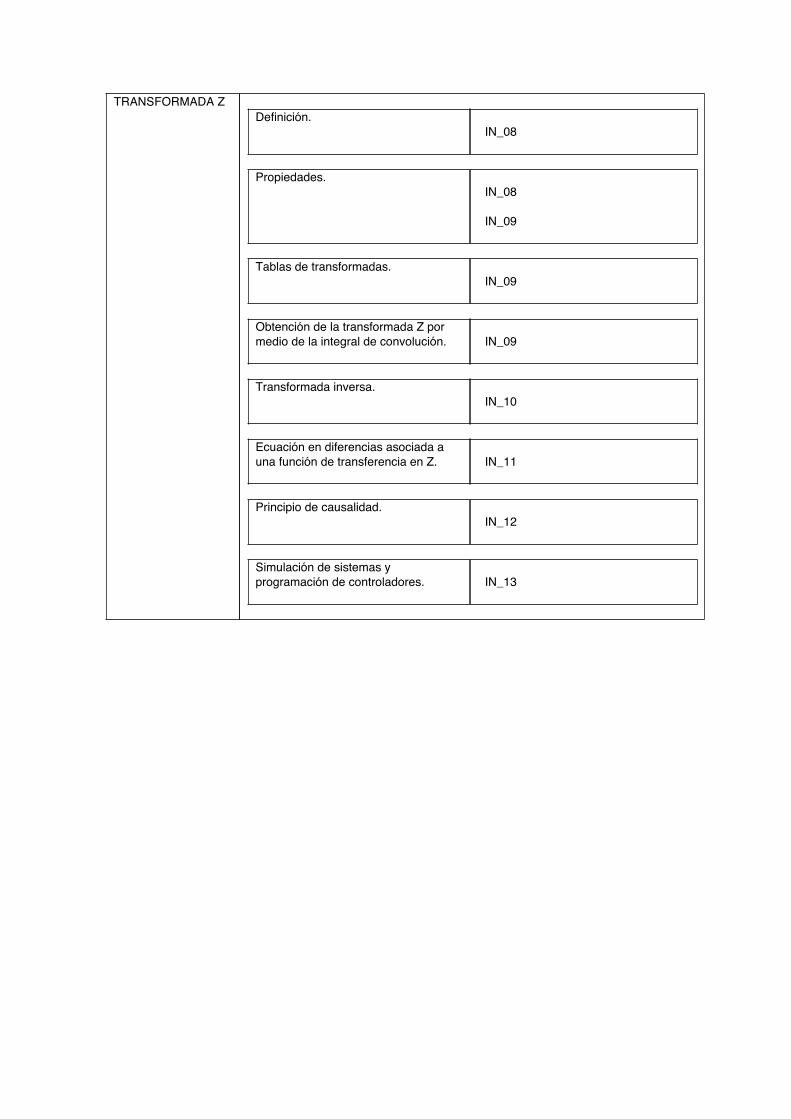
TRANSFORMADA ZDefinición.
IN_08
Propiedades.IN_08
IN_09
Tablas de transformadas.IN_09
Obtención de la transformada Z pormedio de la integral de convolución. IN_09
Transformada inversa.IN_10
Ecuación en diferencias asociada auna función de transferencia en Z. IN_11
Principio de causalidad.IN_12
Simulación de sistemas yprogramación de controladores. IN_13
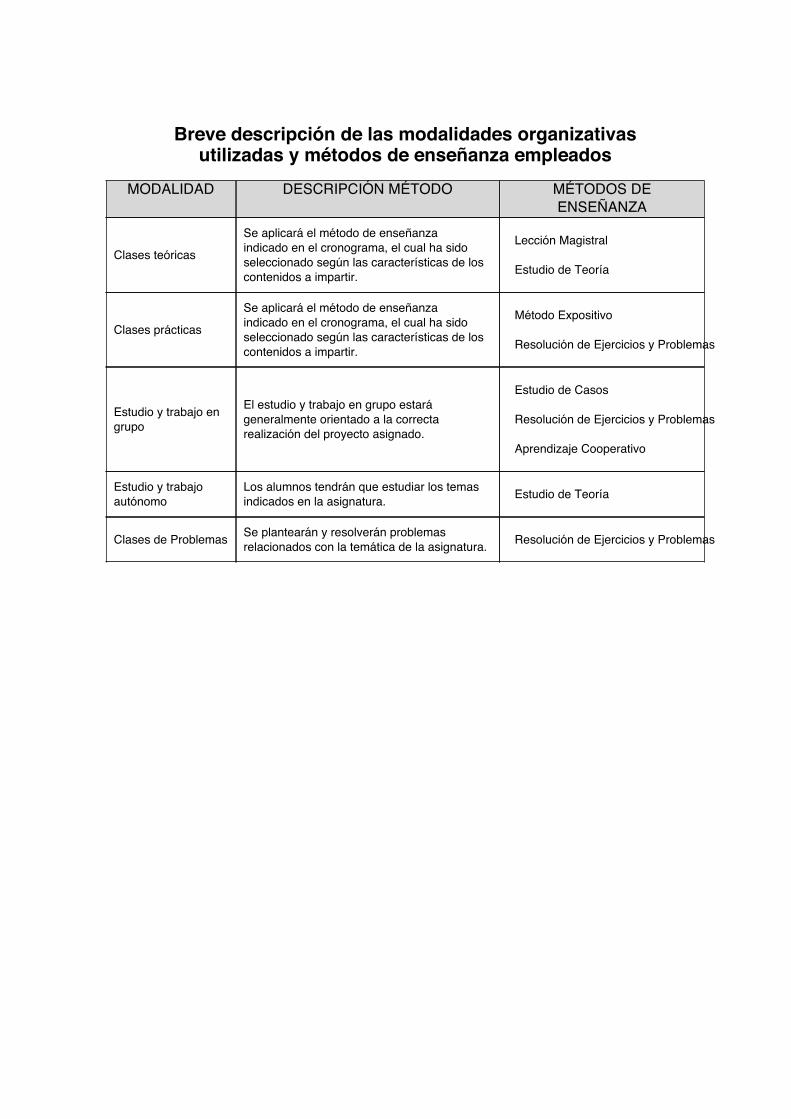
Breve descripción de las modalidades organizativasutilizadas y métodos de enseñanza empleados
MODALIDAD DESCRIPCIÓN MÉTODO MÉTODOS DEENSEÑANZA
Clases teóricas
Se aplicará el método de enseñanzaindicado en el cronograma, el cual ha sidoseleccionado según las características de loscontenidos a impartir.
Lección Magistral
Estudio de Teoría
Clases prácticas
Se aplicará el método de enseñanzaindicado en el cronograma, el cual ha sidoseleccionado según las características de loscontenidos a impartir.
Método Expositivo
Resolución de Ejercicios y Problemas
Estudio y trabajo engrupo
El estudio y trabajo en grupo estarágeneralmente orientado a la correctarealización del proyecto asignado.
Estudio de Casos
Resolución de Ejercicios y Problemas
Aprendizaje Cooperativo
Estudio y trabajoautónomo
Los alumnos tendrán que estudiar los temasindicados en la asignatura. Estudio de Teoría
Clases de Problemas Se plantearán y resolverán problemasrelacionados con la temática de la asignatura. Resolución de Ejercicios y Problemas

Cronograma de trabajo de la asignaturaSEMANA ACTIVIDADES
1
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición deltema 1
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Presentaciónde unaherramientade cálculosimbólico.
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Ejerciciosrealizados enla sesión delaboratorio.
Clases deProblemas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. Sí
Evaluacióncontinua 1 1,28
Estudio dela materiaimpartida.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
2
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delos puntos 2.1a 2.3
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Introduccióna latransformadade Laplacecon unaherramientade cálculosimbólico.
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28
Estudio dela materiaimpartida.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
3
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delos puntos 2.3y 2.4
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Presentaciónde unaherramientade simulaciónde sistemas.
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28
Estudio dela materiaimpartida.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
4
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delpunto 2.5
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Introducción alos diagramasde bloquesy simulaciónde sistemassencillos.
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21

5
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Problemas deltema 2.
Clases deProblemas
Resoluciónde Ejerciciosy Problemas
Aula 2 hrs. No 1,28
Ejercicios detransformadade Laplaceinversa yrespuesta enfrecuencia concomputador.
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
Ejerciciosrealizados enla sesión delaboratorio.
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. Sí
Evaluacióncontinua 1 1,28
6
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delos puntos 3.1a 3.4
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Ejercicios detransformadaZ directa concomputador.
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Ejerciciosrealizados enla sesión delaboratorio.
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. Sí
Evaluacióncontinua 1 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
7
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delos puntos 3.5a 3.8
Clasesteóricas
Estudio deTeoría Aula 2 hrs. No 1,28
Ejercicios desimulaciónde sistemasdiscretos concomputador.
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Ejerciciosrealizados enla sesión delaboratorio.Ejercicios decomprobaciónsobre lostemas 2 y 3.
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. Sí
Evaluacióncontinua
1 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
8
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposicióndel tema 4 yejercicios.
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Ejercicios decomprobacióndeequivalenciade sistemas
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28

concomputador.
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 6 hrs. No 3,85
9
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición deltema 5.
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Práctica deidentificaciónde sistemassimulados.
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Ejercicios decomprobaciónsobre el tema4
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. Sí
Evaluacióncontinua 1 1,28
Preparaciónde lapráctica deidentificaciónde un sistema.
Estudio ytrabajo engrupo
Estudio deCasos Otros 3 hrs. No 1,92
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 4 hrs. No 2,56
10
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición deltema 6.
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Práctica deidentificaciónde un sistemaSISO (LTI)
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 6 hrs. No 3,85
11
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delpunto 8.1
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Práctica deidentificaciónde un sistemaSISO (LTI)
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Práctica deidentificación.
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. SíEvaluacióncontinua 1 1,28
Preparaciónde la prácticade control pordiseño directo.
Estudio ytrabajo engrupo
AprendizajeCooperativo Otros 3 hrs. No 1,92
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 3 hrs. No 1,92
12
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Ejerciciosrelativos alpunto 8.1
Clases deProblemas
Resoluciónde Ejerciciosy Problemas
Aula 2 hrs. No 1,28
Práctica dediseño directosobre un
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28
sistema SISO(LTI).
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
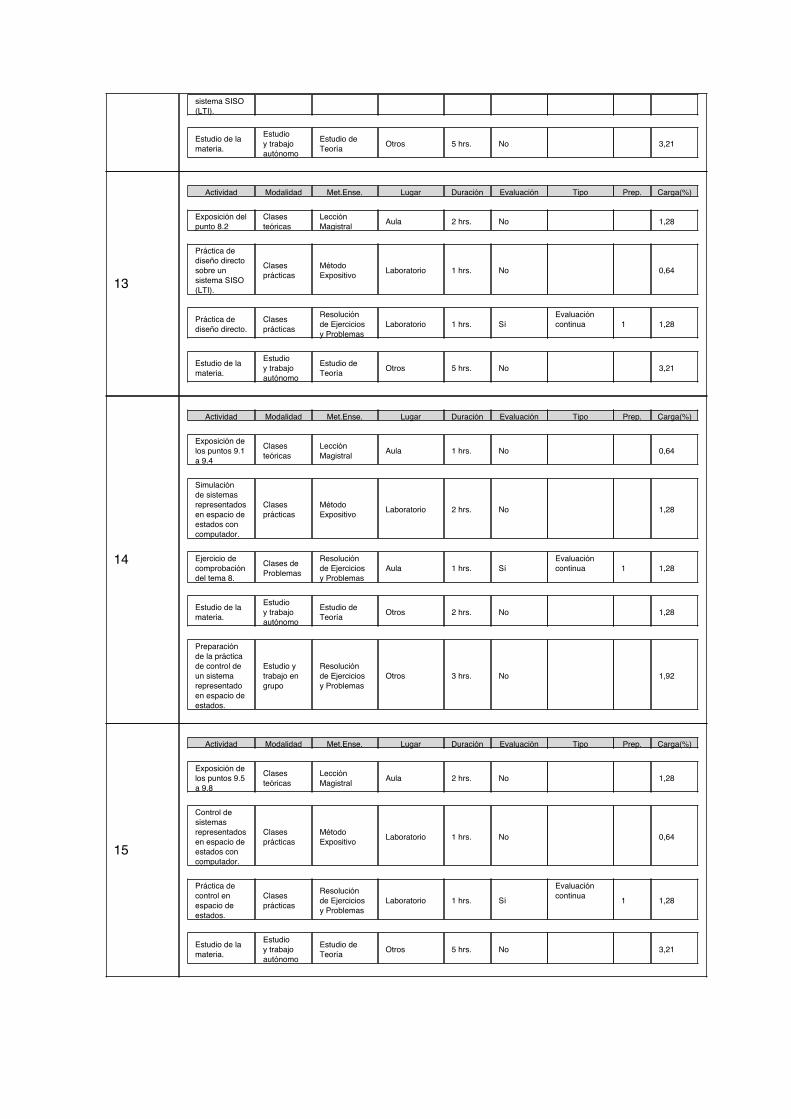
13
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delpunto 8.2
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Práctica dediseño directosobre unsistema SISO(LTI).
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Práctica dediseño directo.
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. SíEvaluacióncontinua 1 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
14
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delos puntos 9.1a 9.4
Clasesteóricas
LecciónMagistral Aula 1 hrs. No 0,64
Simulaciónde sistemasrepresentadosen espacio deestados concomputador.
Clasesprácticas
MétodoExpositivo Laboratorio 2 hrs. No 1,28
Ejercicio decomprobacióndel tema 8.
Clases deProblemas
Resoluciónde Ejerciciosy Problemas
Aula 1 hrs. SíEvaluacióncontinua 1 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 2 hrs. No 1,28
Preparaciónde la prácticade control deun sistemarepresentadoen espacio deestados.
Estudio ytrabajo engrupo
Resoluciónde Ejerciciosy Problemas
Otros 3 hrs. No 1,92
15
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposición delos puntos 9.5a 9.8
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Control desistemasrepresentadosen espacio deestados concomputador.
Clasesprácticas
MétodoExpositivo Laboratorio 1 hrs. No 0,64
Práctica decontrol enespacio deestados.
Clasesprácticas
Resoluciónde Ejerciciosy Problemas
Laboratorio 1 hrs. Sí
Evaluacióncontinua 1 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21

16
Actividad Modalidad Met.Ense. Lugar Duración Evaluación Tipo Prep. Carga(%)
Exposiciónde los puntos9.10 a 9.12
Clasesteóricas
LecciónMagistral Aula 2 hrs. No 1,28
Estudio de lamateria.
Estudioy trabajoautónomo
Estudio deTeoría Otros 5 hrs. No 3,21
Evaluación dela asignatura.
Clases deProblemas
Resoluciónde Ejerciciosy Problemas
Laboratorio 4 hrs. SíExamen final
14 11,54
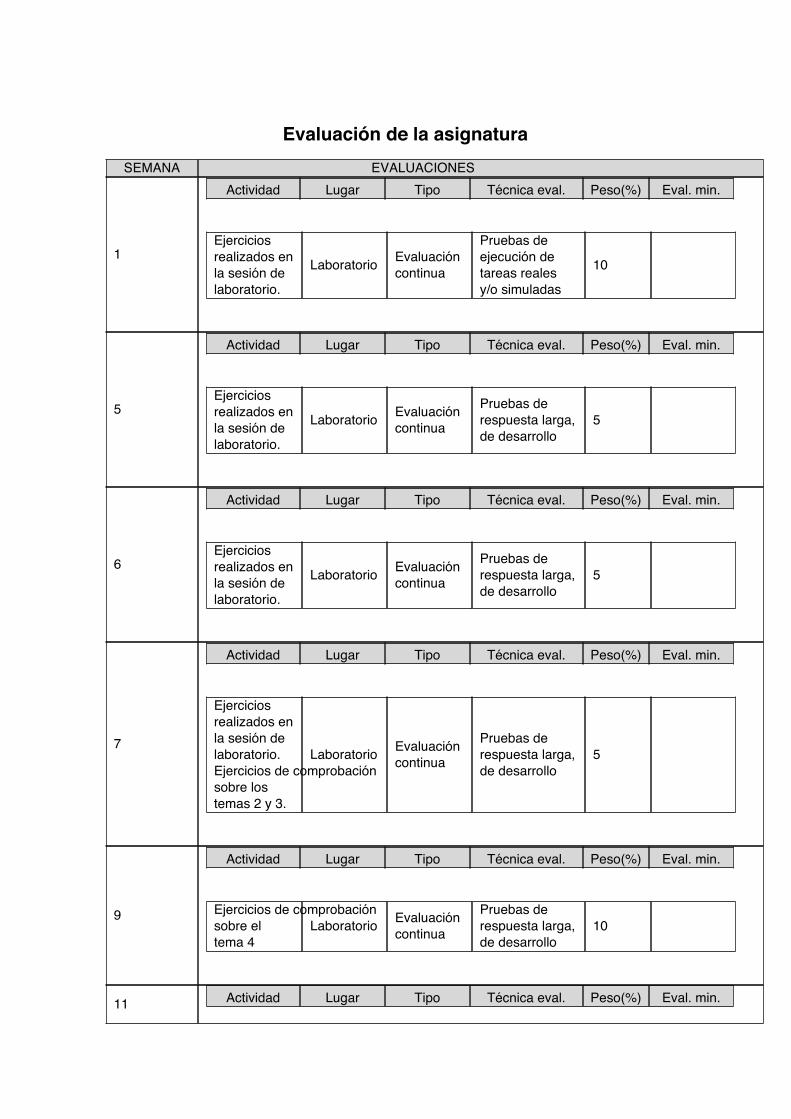
Evaluación de la asignaturaSEMANA EVALUACIONES
1
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Ejerciciosrealizados enla sesión delaboratorio.
Laboratorio Evaluacióncontinua
Pruebas deejecución detareas realesy/o simuladas
10
5
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Ejerciciosrealizados enla sesión delaboratorio.
Laboratorio Evaluacióncontinua
Pruebas derespuesta larga,de desarrollo
5
6
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Ejerciciosrealizados enla sesión delaboratorio.
Laboratorio Evaluacióncontinua
Pruebas derespuesta larga,de desarrollo
5
7
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Ejerciciosrealizados enla sesión delaboratorio.Ejercicios de comprobaciónsobre lostemas 2 y 3.
Laboratorio Evaluacióncontinua
Pruebas derespuesta larga,de desarrollo
5
9
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Ejercicios de comprobaciónsobre eltema 4
Laboratorio Evaluacióncontinua
Pruebas derespuesta larga,de desarrollo
10
11 Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.

Práctica de identificación.Laboratorio Evaluacióncontinua
Pruebas deejecución detareas realesy/o simuladas
10
13
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Prácticade diseñodirecto.
Laboratorio Evaluacióncontinua
Pruebas deejecución detareas realesy/o simuladas
10
14
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Ejercicio de comprobacióndel tema 8. Aula Evaluación
continua
Pruebas derespuesta larga,de desarrollo
25
15
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Práctica decontrol enespacio deestados.
Laboratorio Evaluacióncontinua
Pruebas deejecución detareas realesy/o simuladas
20
16
Actividad Lugar Tipo Técnica eval. Peso(%) Eval. min.
Evaluaciónde laasignatura.
Laboratorio Examenfinal
Pruebas derespuesta larga,de desarrollo
100
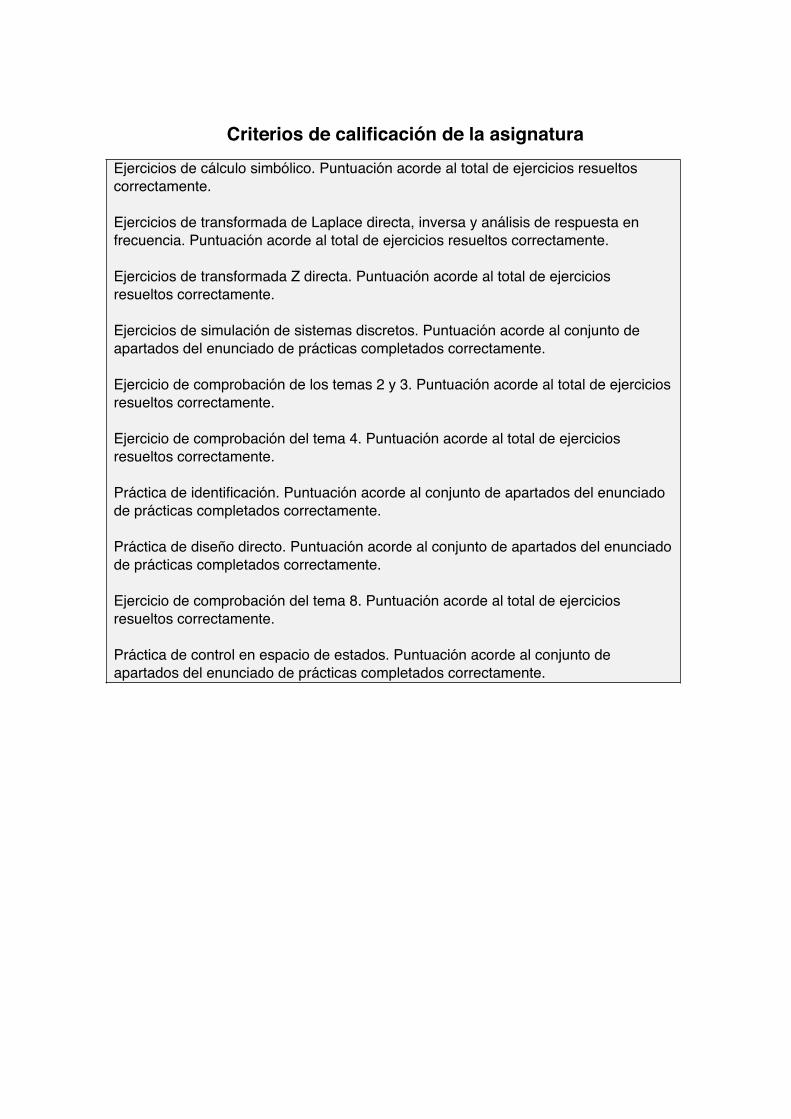
Criterios de calificación de la asignaturaEjercicios de cálculo simbólico. Puntuación acorde al total de ejercicios resueltoscorrectamente.
Ejercicios de transformada de Laplace directa, inversa y análisis de respuesta enfrecuencia. Puntuación acorde al total de ejercicios resueltos correctamente.
Ejercicios de transformada Z directa. Puntuación acorde al total de ejerciciosresueltos correctamente.
Ejercicios de simulación de sistemas discretos. Puntuación acorde al conjunto deapartados del enunciado de prácticas completados correctamente.
Ejercicio de comprobación de los temas 2 y 3. Puntuación acorde al total de ejerciciosresueltos correctamente.
Ejercicio de comprobación del tema 4. Puntuación acorde al total de ejerciciosresueltos correctamente.
Práctica de identificación. Puntuación acorde al conjunto de apartados del enunciadode prácticas completados correctamente.
Práctica de diseño directo. Puntuación acorde al conjunto de apartados del enunciadode prácticas completados correctamente.
Ejercicio de comprobación del tema 8. Puntuación acorde al total de ejerciciosresueltos correctamente.
Práctica de control en espacio de estados. Puntuación acorde al conjunto deapartados del enunciado de prácticas completados correctamente.
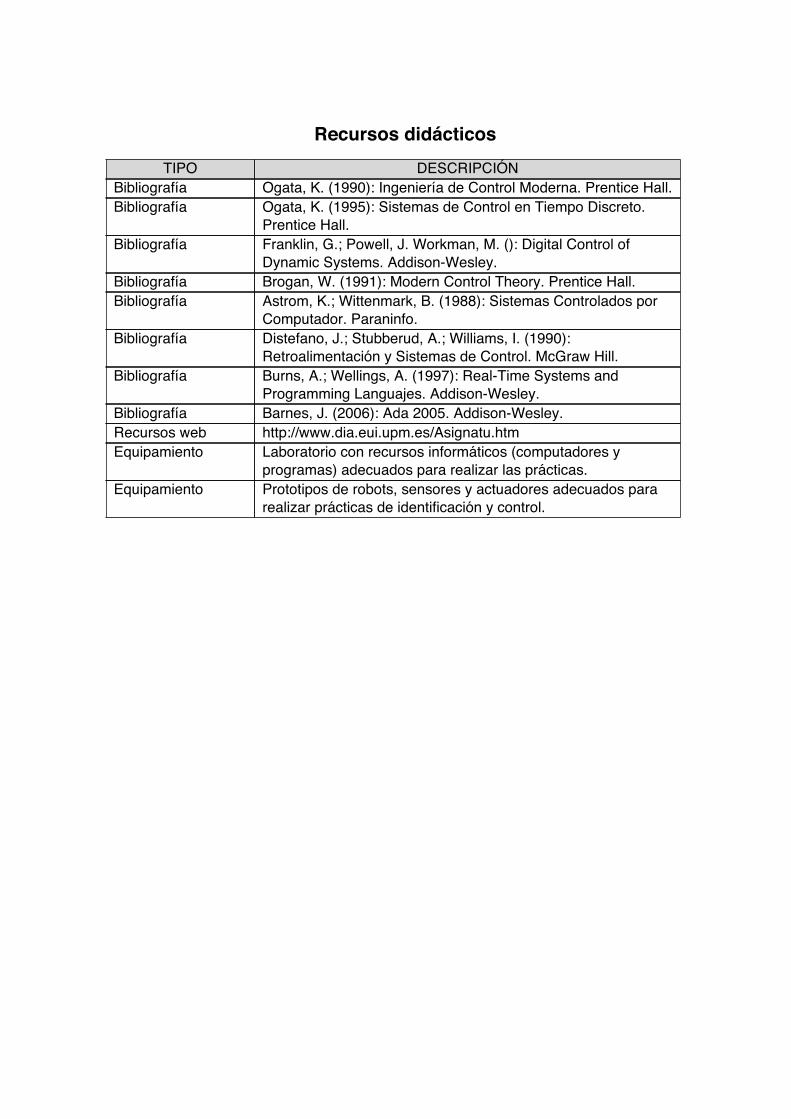
Recursos didácticosTIPO DESCRIPCIÓN
Bibliografía Ogata, K. (1990): Ingeniería de Control Moderna. Prentice Hall.Bibliografía Ogata, K. (1995): Sistemas de Control en Tiempo Discreto.
Prentice Hall.Bibliografía Franklin, G.; Powell, J. Workman, M. (): Digital Control of
Dynamic Systems. Addison-Wesley.Bibliografía Brogan, W. (1991): Modern Control Theory. Prentice Hall.Bibliografía Astrom, K.; Wittenmark, B. (1988): Sistemas Controlados por
Computador. Paraninfo.Bibliografía Distefano, J.; Stubberud, A.; Williams, I. (1990):
Retroalimentación y Sistemas de Control. McGraw Hill.Bibliografía Burns, A.; Wellings, A. (1997): Real-Time Systems and
Programming Languajes. Addison-Wesley.Bibliografía Barnes, J. (2006): Ada 2005. Addison-Wesley.Recursos web http://www.dia.eui.upm.es/Asignatu.htmEquipamiento Laboratorio con recursos informáticos (computadores y
programas) adecuados para realizar las prácticas.Equipamiento Prototipos de robots, sensores y actuadores adecuados para
realizar prácticas de identificación y control.

Otra información reseñable