







Idiomas
Páginas
Jurídico

MAQUINAS ELECTRICASIntroducción: Generalidades
Máquinas eléctricas
Transformación Energía eléctrica-Energía eléctrica
Transformación Energía eléctrica-Energía mecánica
1
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA
CARRERA DE INGENIERÍA ELECTRÓNICA
ASIGNATURA: MAQUINAS ELECTRICAS
TRABAJO GRUPAL
18/Diciembre/2013

Energía
Eléctrica
Campo
Magnético
Energía
Mecánica
MOTORGENERADOR
Clasificación de las maquinas eléctricas
Definición de Máquinas Eléctricas“Son dispositivoselectromagnéticos capaces de convertir energía eléctricaen energía mecánica o viceversa”Las máquinas eléctricas se fundamentan en:
Teoría de circuitos
eléctricos y magnéticos.
Principios de la Teoría
Electromagnética
Descripción de una maquina eléctrica
Resumen de Teoría Electromagnética
Definiciones Básicas Imán permanente: Material capaz de crear líneas de fuerza (Flujo magnético ø ) con una máxima intensidad en los polos y una intensidad casi nula en el centro del
imán.
Electroimán: Imán artificial creado por un conductor bobinado
2
Ilustración 1 líneas de fuerza con polos opuestos obtenido de wikipedia.org
Ilustración 2 líneas de fuerza de un imánpermanente obtenido de Wikipedia.org

que se enrolla sobre un núcleo generalmente ferromagnético. Su ventaja sobre el imán natural es la facilidad de controlar la intensidad de campo mediante 2 parámetros:
La intensidad de corriente #de vueltas del bobinado
Ilustración 3 Electroimán obtenido de www.monografias.com/imanes.100
Campo magnético: Zona de influencia que rodea a un imán natural o artificial y se halla representado por líneas de flujo o fuerzaLíneas ferromagnéticas (Líneas de Inducción): Sirven para representar el campo magnético y se establece que salen del polo norte de un imán y con el sur del mismo.Las líneas de fuerza presentan las siguientes características:Siempre forman lazos cerrados: Existen dentro del cuerpo del iman y
continúan externamente hasta cerrar el lazo.
Son direccionales: Todas las lineas emergen de un área general del iman (polo norte) y están en un área diferente (polo sur), es decir:
INTERNAMENTE: De sur a norte EXTERNAMENTE: De norte a sur
Las líneas de fuerza no se interceptan: Es decir no pueden ocupar el mismo espacio, ni tener un cruce o punto común entre ellos.
Las líneas de fuerza se repelen mutuamente: Es decir 2 líneas de fuerza cercanas experimentan fuerzas que tienden a separarlas.
Las líneas buscan campos de baja reluctancia.
Espacio libre y mayoría de materiales: Elementos de alta reluctancia,es decir, medios difíciles de ser ocupados por líneas de fuerza.
Elementos ferromagnéticos: Materiales o medios de baja reluctancia
Permeabilidad del material: Si el material de un circuito magnético permite establecer fácilmente las líneas de flujo, se dice que tiene alta permeabilidad
3

I
eléctrica.
μ=μR μ0
μ0=4 π×10−7[Hm ][ Henrymetro ]
μR :Permeabilidad relativadelmat erial
Electromagnetismo: El estudio común de electricidad y magnetismo.
∅
LEYES Y EXPRESIONES QUE RIGEN EL ELECTROMAGNETISMO
Densidad de flujo magnético∅=∫BdA
Cuando B es constante y perpendicular a cualquier punto del área entonces:∅=BA
∅ :Webber
A :m2
EntoncesB=∅/ A
B=[Wb
m2 ]=[T ]
Densidad de = 10-12 [ T ]Densidad del campo magnético de la Tierra 50 [µT]
4
Ilustración 4 Flujo de corriente a través de un conductor

Densidad en máquinas : 1 – 2 [ T ]Ley de Faraday
Conductor móvil en el campo magnético:
a ξ=B .v .l Donde: ξ =fuerza electromotriz
Generador eléctrico B= Campo magnético de Densidad B
v = Velocidad del conductor a través del
campo B
l = Longitud del conductor
Conductor fijo en el campo magnético
a F=i . l .B Donde F = Fuerza inducida por el campo B
i = corriente que circula por el conductor
Principio del motor eléctrico
Circuitos magnéticos Ley de ohm para los circuitos magnéticos
a ϕ=FR Donde ϕ = Flujo Magnético
F = Fuerza magnetómotriz (f.m.m)
R = Reluctancia
Representación gráfica y eléctrica del circuito magnético
R = Reluctancia
En electricidad
j resistencia=l
ρ . A donde ρ = conductividad
A = área de la sección
transversal
l = longitud del conductor
En magnetismo
5
Ilustración 5 Circuito magnético obtenido de S. Chapman
ϕ = weber
F =
ampere−vuelta∨amperio ,
R = vueltahenry
F=N . I
N = número de vueltas

g R=l
µ. A Donde µ= permeabilidad
A = área de la sección transversal
l = longitud del conductor
Intensidad de campo magnético: H
k ϕ=FR F=N . I F=R .ϕ
l ϕ=N .IR l B . A=
N . IR F=
lµ . A
.ϕ
l B=N . IR . A F=
lµ . A
.B . A
B=N . I . µ . A
R . A F=l .Bµ=l .H .µ
µ
s B=( N . Il ). µ = H. µ F=l . A
B=( N . Il )[ Am ]
Curvas de saturación
Ejercicios:
1) Hallar la fmm para establecer un flujo de entrehierro de 7∗10−4Wb en
el circuito de la figura.
6
Ilustración 6 Curva de saturación obtenido de S. Chapman
Saturación R altaFlujo de densidad residual
RodillaRegion lineal R baja

Ilustración 7 obtenido de S. Chapman
A : Sección transversal
A :5∗10−4m2
Acero Laminado: lA=0.11m→F A
Acero Fundido : lB=0.169m→FB
Aire : la=0.001m→Fa
ɸ=7∗10−4Wb
B=ɸA=7∗10−4
5∗10−4=1.4T
Para Acero Laminado:
B=1.4T→H A=800Am
Para Acero Fundido:
B=1.4T→HB=1800Am
Para el Aire
7

H aire=Bu0=
1.4
4∗π∗10−4=1.116∗106
Am
FA=H A∗lA=(800 ) (0.11)=88 A
FB=H B∗lB=(1800 ) (0.169 )=306 A
Fa=H a∗l a=(1.11∗106 ) (10−3 )=1.114 A
FT=F A+FB+Fa
FT=1508 A
FT=∑ F
Deber:
Hallar la corriente necesaria para crear un flujo de 1.44∗10−3Wb en el
entrehierro de la figura, N=500 vueltas en el yugo, espesor 3 mmAcero Fundido (consultar curva B-H)
Ilustración 8 obtenido de S.Chapman
Voltaje Inducido:Autoinductancia o Inductancia de una bobina: Se define como “la relación entre un cambio diferencial en los concatenamientos de flujo y el cambio diferencial en la corriente.”Para el circuito de la Figura:
8

Ilustración 9 Obtenido de S. Chapman
e=Ndɸdt
L=Ndɸdi ; L= Inductancia en la bobina
e=Ldidt → Ley de la Inducción de Faraday
Inductancia Mutua:Para el circuito:
Ilustración 10 Obtenido de S. Chapman
e1=N 1dɸ1dt = L1=
di1di
9
e2=N2dɸ2dt
=N 2
dɸ2di1
∗di 1
dt
Dónde: N21=d ɸ21di 1
=di1dt
Inductancia mutua de la bobina1 a la bobina 2.Circuito equivalente.
Ilustración 11 Circuito equivalente Obtenido de S. Chapman
Pérdidas:En una máquina eléctrica las pérdidas de clasifican en:
Pérdidas en la bobinas (cobre).
Pérdidas mecánicas (originadas en el rotor).
Pérdidas magnéticas.
Las pérdidas mecánicas se dividen en: Fricción en los cojinetes.
Fricción en las escobillas.
Fricción con el viento.
Las pérdidas magnéticas (pérdidas en el hierro o en el núcleo) se deben a: Corrientes parasitas.
Pérdidas por histéresis.
Pérdidas magnéticas1) Por corrientes parásitas
La fem inducida sobre el material magnético produce corrientes a lo
largo del conductor ferromagnético.
Tienen distintas trayectorias dentro del material ferromagnético si este
es un núcleo sólido.
10
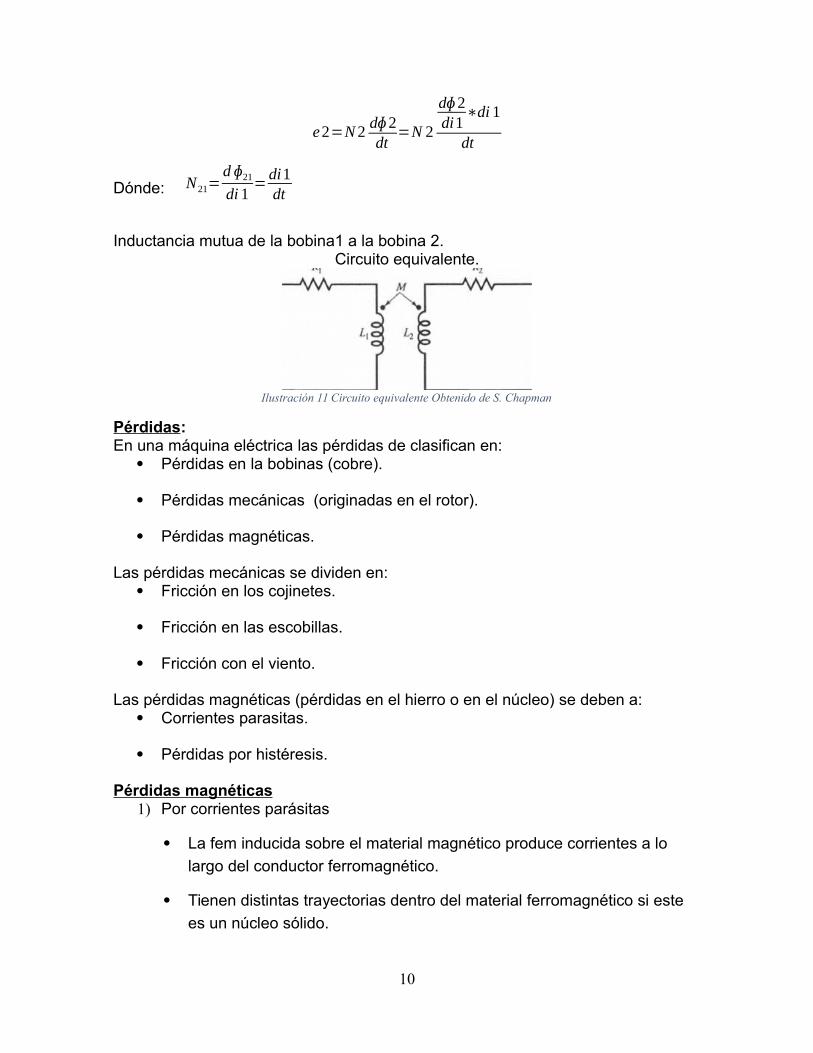
Si la densidad de flujo aumenta, las corrientes también.
Se las conoce como corrientes parasitas o corrientes de Foucault, y
generalmente toman la forma de remolino.
Ilustración 12 Perdida de Corrientes parasitas Obtenido de S. Chapman
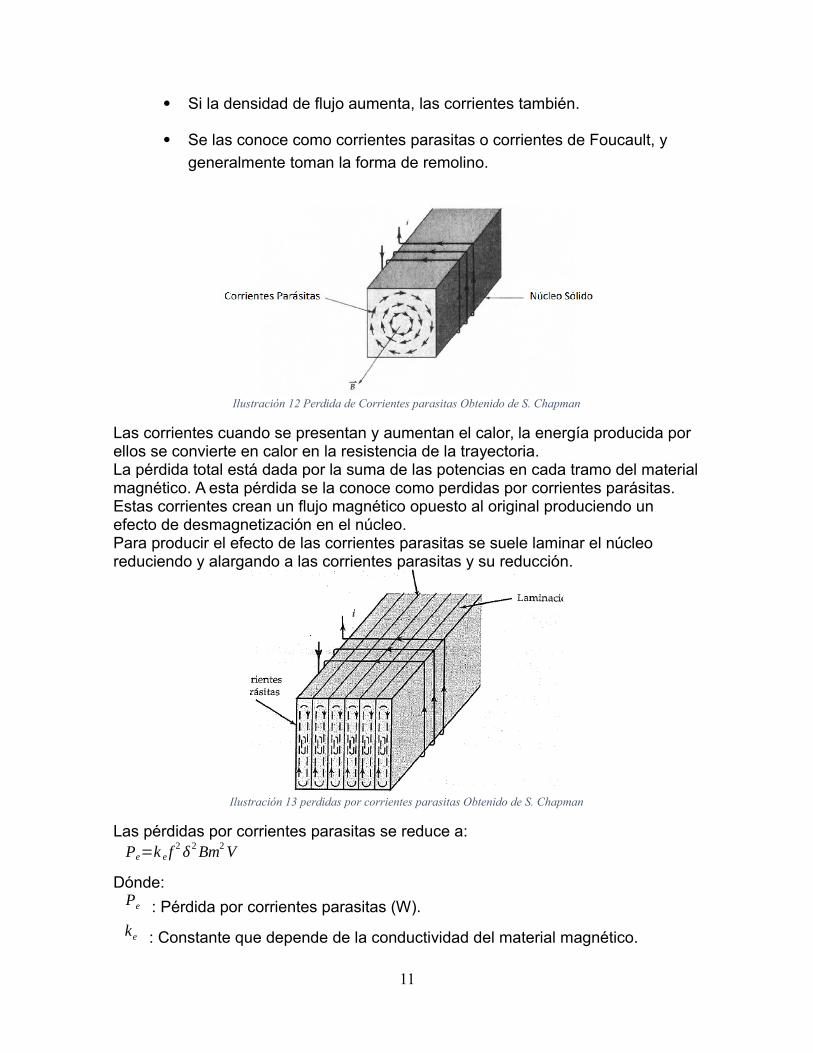
Las corrientes cuando se presentan y aumentan el calor, la energía producida por ellos se convierte en calor en la resistencia de la trayectoria.La pérdida total está dada por la suma de las potencias en cada tramo del materialmagnético. A esta pérdida se la conoce como perdidas por corrientes parásitas.Estas corrientes crean un flujo magnético opuesto al original produciendo un efecto de desmagnetización en el núcleo. Para producir el efecto de las corrientes parasitas se suele laminar el núcleo reduciendo y alargando a las corrientes parasitas y su reducción.
Ilustración 13 perdidas por corrientes parasitas Obtenido de S. Chapman
Las pérdidas por corrientes parasitas se reduce a:Pe=k e f
2 δ 2Bm2V
Dónde:Pe : Pérdida por corrientes parasitas (W).
ke : Constante que depende de la conductividad del material magnético.
11

f : Frecuencia en Hertz del flujo variable en el tiempo ɸ (t )=ɸm senwt .
δ 2 : Espesor de la laminación (0.36mm~ 0.70mm).
Bm : Densidad máxima de flujo (T).
V: Volumen el material magnético (m3)
Perdidas por histéresis.Ciclo de histéresis.- la relación cíclica B-H, permite determinar las características magnéticas de un material.H c : Valor de H que conduce a B a cero (Fuerza coercitiva).
B r : Remanencia o flujo residual.
Ilustración 14 perdidas por histéresis Obtenido de S. Chapman
De acuerdo a las características B-H; los materiales magnéticos se clasifican en: Materiales magnéticos Duros Br, Hc alto
Materiales magnéticos Suaves Br, Hc bajo
Los materiales magnéticos suaves se utilizan en máquinas AC y transformadores para reducir las pérdidas de potencia por histéresis.
Pérdidas por Histéresis.-
12
Ilustración 15 Obtenido de S. Guru

ω :densidad deenerg í a(energí a por unidad de volumen)
ω=2(∫−Br
Bm
H dB−∫Bm
Br
H dB)ω=2(ω1−ω2)
Ph=kh. f . Bmn .V →Charles Steinmetz
DóndePh:Pé rdida por hist é risis
K h :Constante dependientedelmaterialmagn é tico
n :exponente de Steinmetz (1.5a2.5)
Transformación de energía eléctrica a mecánica.-CONVERSIÓN DE ENERGÍAELECTROMECÁNICA:
Es un proceso reversible, excepto por
las pérdidas del sistema.
Energía Calórica
Se cumple el siguiente principio:
ωi=ω0+ωl+ωf
Dónde:ωi :energíade entrada
ω0:energíaútil de salida
ωl : pérdidadeenergía comocalor
ωf :cambiode energíaalmacenadaenel campo
EL TRANSFORMADORNOCIONES GENERALES.- El transformador es un dispositivo que implica bobinas acopladas magnéticamente.CARACTERÍSTICAS.-
13
E.ELÉCTRICA E.MECÁNICAE.ELÉCTRICA E.MECÁNICA

Las bobinas se devanan, sobre un núcleo común, con el objeto de incrementar el acoplamiento entre ellos.
Para los núcleos se utiliza generalmente materiales de baja reluctancia y alta permeabilidad, aprovechando y elevando la eficacia de operación del transformador.
La frecuencia de la fem inducida es la misma que la de la corriente de la primera bobina.
El transformador puede ser:Elevador Vsecundario > VprimarioReductor Vsecundario > VprimarioCuando Vprimario = Vsecundario Transformador de “uno a uno”.
TRANSFORMADOR IDEAL.-[1]TRABAJO EN VACÍO.-
Ilustración 16 transformador ideal Obtenido de Guru
Características.- El núcleo del transformador es sumamente permeable, es decir, fmm pequeña
para crear un ∅ .
En el núcleo no aparecen perdidas por corrientes parásitas ni por histéresis.
Todo el ∅ circula por el núcleo.
La resistencia en c/devanado es despreciable.
⇒e1=N1d∅dt
; e2=N2d∅dt
⇒V 1
V 2
=e1e2=N1
N2
=a⇒Relación del transformador
[2]TRABAJO CON CARGA.-
14
Dev. Primario Dev. Secundario

Ilustración 17 Descripción de las variables
N 1 I 1=N2 I2
I 2I 1=N 1
N 2
=a
V 1∗I 1=V 2∗I 2
Potenciade entrada=Potencia de salida
e1=N1∗w∗∅m∗coswt
(RMS )~E1=4.44∗f∗N1∗∅m∠00
~E2=4.44∗f∗N2∗∅m∠0
0
N 1
N 2
=
~V 1~V 2
=
~E1~E2
=a
Por condiciones ideales: ~V 1=
~E1 y
~V 2=
~E2
Por corrientes: ~I 2~I 1=N 1
N 2
=a
Para impedancias:
Z2=~V 2~I 2=
1
a2∗~V 1
~I 1=1a2∗Z1
Z1=a2 Z2
EJERCICIOSEl núcleo de un transformador de dos devanados como el que se muestra en la
15
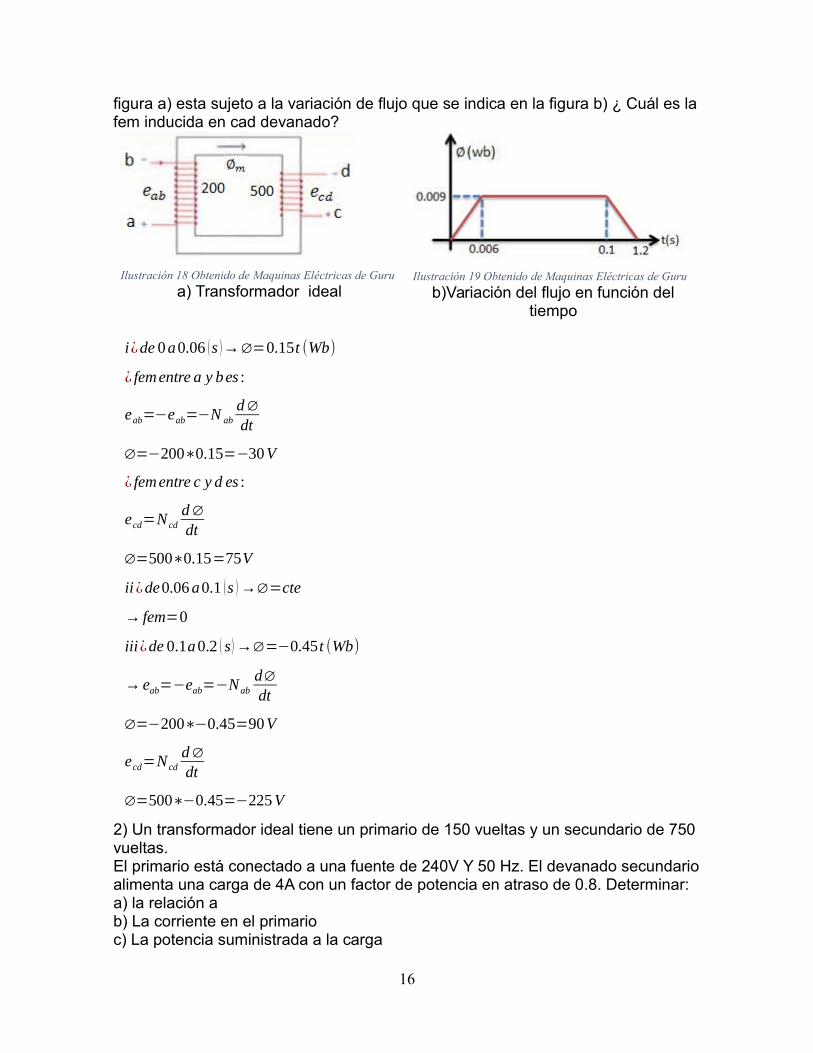
figura a) esta sujeto a la variación de flujo que se indica en la figura b) ¿ Cuál es lafem inducida en cad devanado?
Ilustración 18 Obtenido de Maquinas Eléctricas de Guru
a) Transformador idealIlustración 19 Obtenido de Maquinas Eléctricas de Guru
b)Variación del flujo en función deltiempo
i¿de 0a0.06 (s )→∅=0.15t (Wb)
¿ fementre a y bes :
eab=−eab=−N abd∅dt
∅=−200∗0.15=−30V
¿ fementre c y d es :
ecd=N cdd∅dt
∅=500∗0.15=75V
ii¿de0.06a0.1 (s )→∅=cte
→fem=0
iii¿de 0.1a0.2 ( s)→∅=−0.45t (Wb)
→eab=−eab=−Nabd∅dt
∅=−200∗−0.45=90V
ecd=N cdd∅dt
∅=500∗−0.45=−225V
2) Un transformador ideal tiene un primario de 150 vueltas y un secundario de 750 vueltas.El primario está conectado a una fuente de 240V Y 50 Hz. El devanado secundarioalimenta una carga de 4A con un factor de potencia en atraso de 0.8. Determinar: a) la relación a b) La corriente en el primarioc) La potencia suministrada a la carga
16

d) El flujo en el núcleo
a¿a=N1
N2
=150750
=0.2
b¿i1i2=a→i1=
i2a=40.2
=20 A
V 1
V 2
=a→V 2=V 1
a=240V0.2
=1200
P=4 A∗1200∗cosθ
P=4 A∗1200∗0.8=3840w
d ¿∅=?
E1=4.44 f N 1Øm
Øm=E1
4.44 f N 1
Øm=240
4.44∗(50 )∗(150)
Øm=0.0072[Wb ]=7.2[mWb]
Deber:1. La densidad de flujo magnético en el núcleo de un transformador reductor
de 4.4 KVA, 4400/440 V y 50Hz es de 0.8T. Si la fem inducida por vuelta esde 10 V, determinar:
a) El número de vueltas en los devanados primario y secundario.
b) El área de la sección transversal del núcleo.
c) La corriente a plena carga en cada devanado.
2. El número de vueltas en el primario y secundario de un transformador idealson 200 y 500 respectivamente. El transformador tiene las especificacionesde 10KVA, 250V y 60Hz en el lado primario. El área de la sección
transversal del núcleo es de 40c m2
. Si el transformador opera a plena
carga con un factor de potencia de 0.8 en atraso, determinar:
a) La densidad de flujo efectivo en el núcleo.
b) La especificación del voltaje en el secundario
17

c) Las corrientes en los devanados primario y secundario.
d) La impedancia de la carga en el lado secundario como se observadesde el lado primario.
ESPECIFICACIONES DEL TRANSFORMADORLa placa del transformador provee información sobre:
- Potencia aparente
- Capacidad de manejo de voltaje de cada devanado.
- Frecuencia de operación.
Ejemplo:5kVA, 500/250 V
carga plena o potencia nominal es de 5KVA. Es decir, puede suministrar
5KVA en forma continua.
Voltaje primario 500 V; Vs=250V
I p=5000500
=10 A; I S=5000250
=20 A
a=500250
=2
EL TRANSFORMADOR NO IDEALRestricciones con respecto al transformador Ideal:1) Restricción del devanado:
- La potencia de entrada es mayor a la de salida
- El voltaje en los terminales no es igual a la fem inducida
- La eficiencia en menor que el 100%
e=Psalida
P entrada
18

Ilustración 20 Obtenido de Maquinas Eléctricas de Guru
Diagrama con inclusión de un transformador ideal, R1 y R2 resistenciasagregadas.
2) Flujos de Dispersión
- Se crean flujos de dispersión (a través del aire) en cada devanado del transformador, debido a las corrientes que circulan por las mismas.
Ilustración 21Obtenido de Maquinas Eléctricas de Monografias.com
El flujo de dispersión afecta el rendimiento del trasformador
Se modela 2 devanados
o Uno para el flujo de dispersión.
o Otro para el flujo mutuo.
Circuito con Flujo de Dispersión:
19

Ilustración 22. Circuito con Flujo de Dispersión
Ilustración 23.
Para un trasformador no ideal:E1E2
=I 2I 1=N 1N 2
=a
V 1=E1+(R1+ jX 1 ) I 1
V 2=E2+ (R2+ jX 2 ) I 2
V 1≠ E1 y V 2≠ E2
3) Permeabilidad Finita: El núcleo de un transformador tiene permeabilidad finita y perdida en el
núcleo.
El devanado primario toma de la fuente algo de corriente.
I∅=Ic+ℑ (Perdidas por histéresis y corrientes parasitas)
Donde: Ic = corriente de perdida en el núcleo. Im = corriente de magnetización.
Se define: Rc 1 : Resistencia equivalente de la pérdida en el núcleo, entonces.
Ic=E1Rc 1
20

ℑ=E1jXm1
Circuito equivalente con las 3 restricciones:
Ilustración 24 Circuito con 3 restricciones
Ip : Corriente en el primario.
I∅=I 1−Ip=I 1−I 2a
Ilustración 25
Presencia de un núcleo magnético.Circuito Equivalente de un Transformador
Circuitos Equivalentes Observados Desde El Primario y Secundario
Desde El Primario:
21
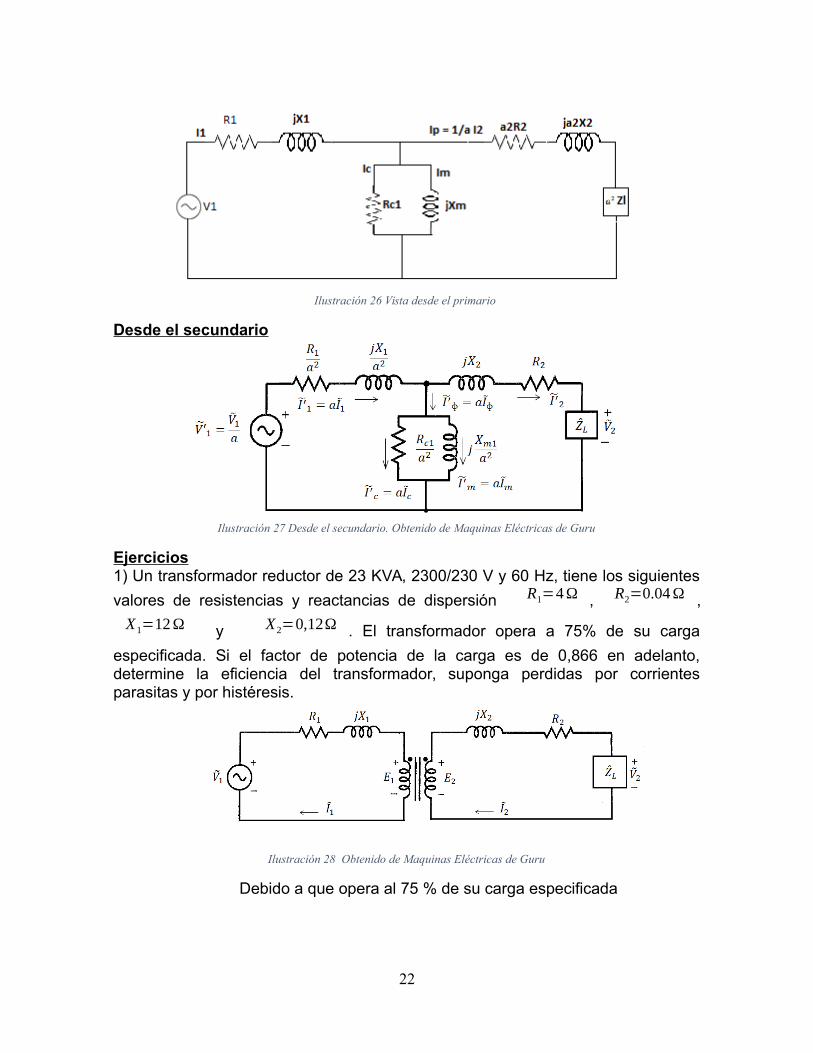
Ilustración 26 Vista desde el primario
Desde el secundario
Ilustración 27 Desde el secundario. Obtenido de Maquinas Eléctricas de Guru
Ejercicios1) Un transformador reductor de 23 KVA, 2300/230 V y 60 Hz, tiene los siguientes
valores de resistencias y reactancias de dispersión R1=4Ω , R2=0.04Ω ,
X1=12Ω y X2=0,12Ω . El transformador opera a 75% de su carga
especificada. Si el factor de potencia de la carga es de 0,866 en adelanto,determine la eficiencia del transformador, suponga perdidas por corrientesparasitas y por histéresis.
Ilustración 28 Obtenido de Maquinas Eléctricas de Guru
Debido a que opera al 75 % de su carga especificada
22

I2=23000230
∗0.75=75 A
f . p .=0.866en adelanto
→~I 2=75∠30°(A )
~Z2=R2+ jX 2=0.04+ j 0.12(Ω)
~E2=228.287∠2.33°(V )
a=10~E1¿~aE2=2282,87∠2.33°(V )
→~I 1=~I2a=7.5∠30° (A )
~Z1=R1+ jX 1=4+ j12(Ω)
~V 1=
~E1+
~I 1~Z1=2282.87∠2.33 °+(7.5∠30 °)(4+ j 12)
~V 1=2269.578∠4,7 °(V )
Pentrada=Pi=ℜ[~V 1
~I 1
¿]
Pentrada=ℜ [ (2269.578∠4,7 ° )7.5∠−30 ° ]=15389.14W
Psalida=Ps=ℜ[~V 2
~I 2
¿]
Pentrada=ℜ [ (230 ) x75∠−30 ° ]=14938,94W
n=P s
Pi
=97.1
2) Para el ejemplo anterior la resistencia de perdida en el núcleo es de 20KΩ y la reactancia equivalente de magnetización es de 15KΩ. Si el transformador alimentala misma carga. ¿Cuál es su eficiencia?~V 2=230V
~I 2=75∠30 °
a=10~E2=228.287∠2.33°(V )~E1=2282,87∠2.33°(V )
Pout=14938.94W~I p=7.5∠30 °(A )
23

~I c=~E1R c1
=0.114∠2.33°(A)
~Im=~E1
j Xm1
=0.152∠−87.67 °(A)
~I ɸ=
~I c+
~Im=0.19∠−50.8°(A)
~I1=
~I p+
~I ɸ=7.53∠28.57 ° ( A )
~V 1=
~E1+
~I 1~Z1=2.271.9∠4.71 °(V )
Pen=ℜ [~V 1~I 1
¿ ]=15645.35W
n=Pout
Pen
x 100=95.5
Diagrama fasorial (vectorial) del transformador .
Ilustración 29 Diagrama fasorial. Obtenido de Maquinas Eléctricas de Guru
Circuitos Equivalentes Aproximados.a) Desde el Primario
Ilustración 30 Desde el primario Obtenido de Maquinas Eléctricas de Guru
24

Ze 1=Re 1+ j Xe 1
Re 1=R1+a2 R2
X e 1=X1+a2 X2
b) Desde el Secundario
Ilustración 31 Desde el secundario Obtenido de Maquinas Eléctricas de Guru
Ze 2=Re 2+ j X e 2
Re 2=R2+R1a2
X e 2=X 2+X1a2
Rc 2=R c1
a2; Xm2=
Xm1
a2
Ejemplo: Con el transformador anterior, analícelo o utilizando el circuito equivalente aproximado observado desde el primario, además trace el diagrama fasorial.V 2
'=a V 2=10 (230∠0 ° )=2300∠0 °
I p=7.5∠30°
Re 1=R1+a2 R2=4+(10 )2 (0,04 )=8Ω
X e 1=X1+a2 X2=12+ (10 )2 (0,12 )=24Ω
Ze 1=8+ j24 (Ω)
V 1=V 2 '+ I p Ze1=2300∠0 °+7.5∠30 °(8+ j24)
V 1=2269∠4.7 °(V )
25

I c=V 1
20000=0.113∠4.7°(A)
Im=V 1
j15000=0.151∠−85.3 °(A)
⇒ I 1= I p+ I c+ Im⏟Iϕ
=7.54∠28.6 °
⇒POUT=Re [ (2300∠0 ° ) (7.5∠−30° ) ]
POUT=14938.94W
P¿=R e [(2269.59∠4.7 ° ) (7.54∠28.6 ° )]
P¿=15645.36W
Ƞ=95.5
Ilustración 32 Obtenido de Maquinas Eléctricas de Guru
PRUEBAS EN LOS TRANSFORMADORES Para hacer análisis de regulación de voltaje y eficiencia
a) Circuito Abierto.
Ilustración 33 Circuito abierto Obtenido de Maquinas Eléctricas de Guru
Pca :Potenciade entrada
26

Pca=Pn≈0+Pc⇒Pca=Pc
Pn :Perdidasen elcobre
Pc :Perdidas enel nucleo
Potencia de entrada: mediante el vatímetro Para obtener las pérdidas del núcleo
Primario: se excita con el voltaje nominal Inomial baja=Ica
Secundario: en circuito abiertoB) CORTO CIRCUITO
Ilustración 34 Corto circuito
Para obtener las pérdidas en los bobinados.
Voltaje de excitación ≈ 10% del voltaje nominal
Circulación de corriente nominal
Se desprecian las perdidas en el núcleo
Se calcula: Pcc: potencia de corto circuito
Rep=Pcc
Ip2 Rep: Resistencia equivalente del primario
Zep=VccIp Vcc: Voltaje de corto circuito
Ip: corriente del primarioXep=√Zep2−Rep2 Xep: reactancia equivalente del primario
Para circuito abierto:El vatímetro mide las perdidas en el núcleo del transformador.El circuito equivalente:
Sca=Vac Iac
∅ ca=cos−1(PcaSca
)
Ic=Icacos (∅ca)
ℑ=Icasin (∅ ca)
27
Ilustración 35 Prueba de circuito abierto _Circuito equivalente

Rc=VcaIc
=Vca2
Pca
X L=Vcaℑ
=Vca2
Qca
Qca=√Sca2−Pca2
Prueba de C.CEl vatimetro registra la predida en el cobre a plena cargaCircuito Equivalente
Ilustración 36 Prueba de cc circuito equivalente
RCH=Psc
Icc2
XCH=√XCH2−RCH
2
ZCH=VccIcc
Con respecto al primario:RCH=R1+a2R2
XCH=X 1+a2 X 2
Criterio de Diseño Óptimo:I12 R1=I2
2 R2
R1=a2 R2=0,5 RCH
X 1=a2X 2=0,5 XCH
Regulación de Voltaje.- Ideal: RUC(%)=0%
Rv=Vsc−Vpc
Vpc∗100
Vsc: Voltaje sin cargaVpc: Voltaje a plena cargaDesde el primario:
Rv=V 1−aV 2
aV 2∗100
Desde el secundario:
28

Rv=
V 1a−V 2
V 2∗100
V1; V2 voltajes efectivos (módulos)
Ejercicios1. Un transformador reductor de 2,2 KVA, 440/220 V y 50 Hz, tiene los
parámetros siguientes, referido al lado primario: ℜ1=3Ω ; Xe1=4Ω ,
Rc1=2,5KΩ y Xm1=2KΩ . El transformador opera a plena carga con un
factor de potencia de 0,707 en atraso. Determine la eficiencia y la regulaciónde voltaje del transformador.
a=440220
=2 ~V 2=220V S=2200VA → I2=
2200220
=10 A
θ=−45°
→~I 2=10∠−45°
~I p=
~I 2a=5∠−45 °(A )
V 2'=a
~V 2=440∠0 ° (V )
→~V 1=V 2
'+~I p (ℜ1+ j Xe1 )=440+(5∠−45°)(3+ j 4)
¿464,762∠0,44 ° (V )
Corrientes de perdida núcleo y magnetización.~IC=
464,762500
∠0,44 °=0,18∠0,44 °(A)
~Im=~V 1
j 2000=0,232∠−89,56 °(A)
~I∅=
~IC+
~Im
~I1=
~I p+
~I∅=5,296∠−45,33 °(A )
Po=1555.63W η=90,6
P¿=1716,91W
RV ( )=V 1−aV 2
aV 2
=464,762−440
440×100=5,63
Los datos siguientes se obtuvieron de la prueba de un transformador reductor de 28KVA y 4800/240 y son:
29

Voltaje Corriente (A) PotenciaPca 240 2 120
Pcc 150 10 600
Determine el circuito equivalente del transformador como se observa desde:a) El lado de alto voltaje
b) El lado de bajo voltaje
RcL=2402
120=480Ω
Sca=V ca Ica=240×2=480VA
Qca=√4802−1202=464,76VAR
XmL=2402
464,76=123,94Ω
a=4800240
=20
→ RcH=a2 RcL=192KΩ
XmH=a2 XmL=49,58KΩ
→ ℜH=Pcc
I cc2=600102
=6Ω
ZeH=V cc
I cc=15010
=15Ω
→ XeH=√152−62=13,75Ω
→ ℜL=ℜH
a2=15mΩ
XcL=XeH
a2=34mΩ
RH=0,5 RcH=3Ω RL=0,5ℜH
a2=7,5mΩ
X H=0,5 XcH=6,88Ω X L=0,5 XeH
a2=17mΩ
30
Prueba de c.c. en lado de alto voltaje

AUTOTRANSFORMADOR
Es un transformador donde los 2 devanados se encuentran conectadoseléctricamente.
Puede contener un solo devanado común y continuo al primario y
secundario.
De forma alternativa es posible conectar dos o más bobinas en el mismo
núcleo magnético.
La conexión eléctrica directa entre los devanados asegura que parte de la
energía se transfiere desde el primario al secundario por conducción y otraparte por inducción.
Se emplean en casi la totalidad de casos donde se aplica los
transformadores normales.
Su principal desventaja a la pérdida de aislamiento eléctrico entre los
devanados primario y secundario. (alto y bajo voltaje).
Las ventajas del autotransformador son:
Es más barato en cuanto a costo.
Entrega más potencia.
Es más eficiente, con parámetros similares.
Requiere una I0 más baja.
FORMAS POSIBLES DE OBTENER UN AUTOTRANSFORMADOR.
31

Ilustración 37 Conexiones del autotransformador
a) Conexión reductora →(V 1+V 2)/V 2 b) Conexión elevadora
→V 2/(V 1+V 2)
c) Conexión reductora →(V 2+V 1)/V 1 d) Conexión elevadora
→V 1/(V 1+V 2)
Para a) Devanado secundario → Devanado común.
Condiciones ideales:~V 1a=~E1a=
~E1+~E2
~V 2a=~E2a=
~E2
~V 1a~V 2a
=
~E1a~E2a
=
~E1+~E2
~E2=N 1+N2
N2
=N1
N2
+1=1+a=aT
aT = Relación del autotransformador.
Para un transformador ideal ⇒ fmm primario=fmmsecundario
32

⇒ ( N 1+N2 ) I1a = N 2 I2a
⇒I 2aI 1a
=N 1+N 2
N2
=1+a=aT
Potencias Aparentes:S0a=¿ Salida S0a=V 2a I2a
S ia=¿ Entrada
V 1a
aT.(aT I 1a)
S0a=S ia
En función de un transformador de 2 devanadosV 2a=V 2
I2a=aT I 1a=(1+a)I 1a
I1a=I1
S0a=V 2 I1(1+a)
I 2I 1=a
¿V 2 I 2(a+1)a
¿S0(1+1a)
S0 = de un transformador de 2 devanados.
⇒ Donde S0 = potencia transferida por inducción.
S0a=¿ Potencia transferida por conducción.
⇒ Autotransformador entrega más potencia.
EJEMPLO: Se conecta un transformador de distribución de 24KVA y 2400 / 240 V como
33

autotransformador. Para cada combinación posible calcule: a) El voltaje deldevanado primario b) El voltaje del devanado secundario c) La relación detransformación, d) La especificación nominal del transformador.
V 1=2400V ,V 2=240V ,So=24KVA, I 1=10 A , I e=100 A
Conexión a)V 1a=2400+240=2640V
V 2a=240V
aT=2640240
=11
Soa=V 2a I2a=V 1a I 1a=V 1a I1
Soa=2460×10=26,4KVA
Especificaciones: 26,4KVA, 2640/240VConexión b)
V 1a=240V
V 2a=2400+240=2640V
aT=2402640
=0,091
Soa=V 2a I2a=V 2a I 1
Soa=2460×10=26,4KVA
Especificaciones: 26,4KVA, 240/2640VConexión c)
V 1a=240+2640=2640V
V 2a=2400V
aT=26402400
=1.1
Soa=V 2a I1a=V 1a I 1a=V 1a I2
Soa=2460×100=264.000VA=264KVA
Especificaciones: 264KVA, 2640/2400VConexión d)
V 1a=2400V
V 2a=2400+240=2640V
34

aT=24002640
=0,91
Soa=V 2a I2a=V 2a I 2
Soa=2460×100=264KVA
Especificaciones: 264KVA, 2400/2640V
Autotransformador Real- Incluyendo: - Resistencias de los devanados
- Reactancia de dispersión - Resistencia de pérdidas en el núcleo - Reactancia de magnetización
Ejemplo:Un transformador de dos devanados, 720MVA y 360/120V tiene las siguientesconstantesRH=18.9Ω,X H=21.6Ω, RL=2.1Ω, X L=2.4Ω ,RCH=8.64K Ω, XMH=6.84K Ω . Este
transformador se conecta como autotransformador elevador de 120/480V, siel autotransformador entrega la carga plena con un factor de potencia de0.70 en adelanto, determine su eficiencia y la regulación de voltaje.
35

Ilustración 38 Obtenido de Maquinas Eléctricas de Guru
aT=480120
=0,25
a=360120
=3
RCL=8640
32=960Ω
XmL=6840
32=760Ω
Con plena carga
I2a=720360
=I 1=IH
I2a=2 A
~I 2a=2∠ 45 °(A )
~I pa=
~I 2aaT
=2∠45 °0,25
=8∠45 ° A
I com=~I pa−
~I2a=6∠45 ° A
~EH=
~E1=a
~EL=a
~E2=3
~EL
4~EL=~I 2a (RH+ jXH )+
~V 2a− I com (RL+ jX L)~EL=119,74∠ 4,57 °V
36

~EL+~Em(RL+ j X L)
~V 1a=121.51∠13.63 °(V )
~I ca=~V 1a
RCL
=0.127∠13.63 °(A)
~Ima=~V 1a
j XmL
=0.160∠−76.37 °(A )
~I ϕa=
~I ca+~Ima=0.204∠−38 °(A)
~V 1 A=
~I Pa+~I ϕa=8.027∠43.56 °(A)
PC=Re [~V 2a ,~I 2a
¿ ]=678.82(w)
P1=Re [~V 1a ,~I1a
¿ ]=845.3(w)
⇒η=80.3
Si se elimina la carga:
~V 2anL=~V 1a
aT
=486.0Ω∠13.63 °(V )
Rv ( )=V 2anL−V 2a
V 2a
∗100=1.26
37

TRANSFORMADORES TRIFASICOS
Se puede obtener un transformador trifásico con tres transformadores monofásicosconectados de formas determinadas Y o ∆.
Por razones económicas se usa para un transformador trifásico un solo núcleomagnético para los devanados.
Los nucleos mas usados son:
Ilustración 40 Transformador tipo núcleo obtenido de wikipedia.org
Tipo núcleo
Tipo acorazado
El tipo acorazado permite menos distorsión en los voltajes resultantes (ondas),con un camino externo pero los armónicos con los devanados.
Existen cuatro formas de conectar los devanados del transformador trifásicoestas son:
38
Ilustración 39 transformador tipo acorazado obtenido de wikipedia.org

1. CONEXION Y/Y
Ilustración 41 Conexión YY Obtenido de Maquinas Electricas de Guru
Voltaje línea – línea es √3 veces el voltaje nominal del transformador
monofásico.
El voltaje del transformador es: V L /√3 .
La principal ventaja de la conexión Y/Y es el acceso al terminal neutro encada lado, especialmente para conexión a tierra.
Sin tierra, la conexión Y/Y es satisfactoria si la carga trifásica se hallaequilibrada, de lo anterior se produce una deformación en las formas de
las ondas de las fem inducida.
2. CONEXIÓN ∆/∆
39

A1
1mH
B1
1mH
C1
1mH
A2
1mH
B2
1mH
C2
1mH
Ilustración 42 Conexión ∆/∆ Obtenido de Maquinas Electricas de Guru
Voltaje línea – línea es igual al voltaje de fase correspondiente. Esta conexión es útil usando los voltajes menos altos. Sirve para cargas equilibradas y no equilibradas. Una desventaja es la no presencia de un neutro físico. Los aislamientos eléctricos son mas caras y complejas que una conexión
Y/Y (voltaje de fase mayor que la conexión Y/Y)
3. CONEXIÓN Y/∆
Usada para aplicaciones reductoras.
La corriente en el devanado secundario es de aprox 58% de la corriente de carga.
Voltajes en el lado primario tomados entre línea y neutro. Voltajes en el lado secundario de línea a línea.
40
A la fuente trifásica
Neutron
A la carga trifásica
Ilustración 43 Conexión Y/∆Obtenido de Maquinas Electricas de Guru

A1
1mH
B1
1mH
C1
1mH
A2
1mH
B2
1mH
C2
1mH
4) CONEXIÓN ∆/Y
Se usa paraaplicaciones elevadoras.
Neutro en el secundario
ANALISIS DE UN TRANSFORMADOR TRIFÀSICO Para el análisis se supone 3 transformadores monofásicos conectados para
formar un trifásico. Se supone que el transformador trifásico alimenta carga equilibrada.
Zy=Z ∆3
~VL :Voltaje lìnea−lìnea→Conexiòn
~Vn=~VL√3
∠±30 °
Casi siempre voltajes en el primario siguen secuencia de fase positiva.
41
A la fuente trifásica
A la carga trifásica
Neutron
Ilustración 44 Conexión ∆/Y Obtenido de Maquinas Electricas de Guru
+ 624<30° -
360<
0°
-
360<-120°
-
360<
120°
-- 624<150° +
- 624<-90°
+
A1
B1C1
+ 208<30° -120<
0°
-120<-120°
-
120<
120°
-
- 208<150° +
- 208<-90°
+
A2
B2C2
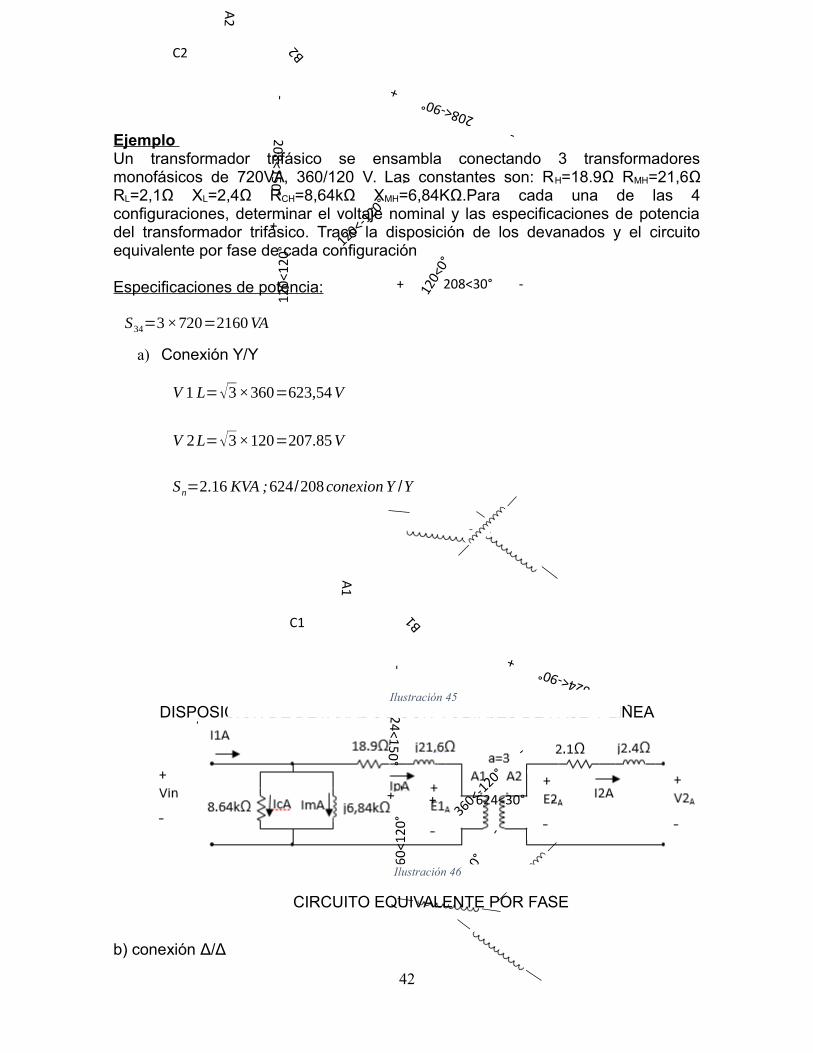
Ejemplo Un transformador trifásico se ensambla conectando 3 transformadoresmonofásicos de 720VA, 360/120 V. Las constantes son: RH=18.9Ω RMH=21,6ΩRL=2,1Ω XL=2,4Ω RCH=8,64kΩ XMH=6,84KΩ.Para cada una de las 4configuraciones, determinar el voltaje nominal y las especificaciones de potenciadel transformador trifásico. Trace la disposición de los devanados y el circuitoequivalente por fase de cada configuración
Especificaciones de potencia:
S34=3×720=2160VA
a) Conexión Y/Y
V 1 L=√3×360=623,54V
V 2L=√3×120=207.85V
Sn=2.16 KVA ;624/208conexion Y /Y
DISPOSICION DE DEVANADOS CON VOLTAJES DE FASE Y LINEA
CIRCUITO EQUIVALENTE POR FASE
b) conexión Δ/Δ
42
Ilustración 45
Ilustración 46

V 1L=360V
V 2L=120V
Especificaciones: 2,16 KVA; 360/120 V; Δ/Δ
Ilustración 47 Obtenido de Maquinas Electricas de Guru
Disipación de los devanados
Ilustración 48 Obtenido de Maquinas Electricas de Guru
360
√3v /
360
√3v
a=3Circuito equivalente por fase
Ilustración 49 Obtenido de Maquinas Electricas de Guru
c) Especificaciones: 2,16 KVA; 624/120 Y/Δd) Especificaciones: 2,16 KVA; 624/120 Δ/Y
c) E1n=aE2n∟30 ° d) E1n=aE2n∟−30 °
43

IPA=1aI 2a∟30 ° IPA=
1aI 2a∟−30°
Construcción y especificaciones.-Tipos de transformadores:
Acorazado Núcleo
Para ambos casos el circuito equivalente se construye conlaminaciones.
El material más común es el acero siliconado. Para trifásicos se puede utilizar un transformador trifásico o un banco de
tres transformadores monofásicos: La primera opción es más pequeña y liviana, menos costosa y más
eficiente. Para reparación se desconecta todo el transformador. En el segundo caso se puede hacer reparación uno por uno y seguir
funcionando. Se toman en cuenta también.
Especificaciones dieléctricas. Propiedades térmicas del aislamiento de los devanados.
De 3 a 500KVA Distribución.>500KVA Potencia o transmisión.
TRANSMISION DE LA ENERGIA ELECTRICA
44

En casi todas las etapas se realiza regulación de voltaje para mantener los voltajes primarios y secundarios en límite permisibles.
Sistema de medida por unidad
Es un método de solución de circuitos que contienen transformadores el cual elimina lanecesidad de hacer explicitas las conversiones de nivel de voltaje en todos lostransformadores de sistema. En su lugar, las conversiones necesarias se realizanautomáticamente por el método en si, sin que el usuario deba preocuparse por latransformación de impedancias.Debido a que tales transformaciones pueden omitirse, los circuitos que contienentransformadores pueden resolverse con facilidad y riesgo mínimo de error este método decálculo se lo conoce como sistema por unidad (pu) de medida.La ventaja que hace importante a este método es el estudio de máquinas eléctricas ytambién transformadores eléctricos puesto a que el tamaño de las máquinas ytransformadores son diversos por ejemplo 1ohm para un transformador puede serextremadamente grande pero ridículamente despreciable para otro todo depende de laspotencias y voltajes nominales del aparato.
En el sistema por unidad corrientes, voltajes, potencias, impedancias no se miden en susunidades normales del S.I. en su lugar cada magnitud eléctrica se mide en fraccionesdecimales de algún nivel base.
cantidadporunidad=valorrealvalorbase
donde el valor real es la magnitud eléctricaEs común seleccionar dos magnitud para definir el sistema por unidad que generalmenteson voltaje y potencia (o aparente) y en un sistema monofásico estas relaciones son lassiguientes.
Pbase ,Qbase , Sbase=V base∗Ibase
45

Sbase=V base
I base
Y base=I baseV base
Zbase=V base2
Sbase
con valores de S o P y V se puede calcular facilmente los demas valores con estas ecuaciones.
Para entender mejor expliquemos todo con un ejemplo:La figura 2.22 muestra un sistema de potencia sencillo este sistema contiene un generador de 480 V conectado a un transformador elevador ideal de relación 1:10 una linea de transmisión, un transformador reductor de relación 20:1 y una carga, la
impedancia de la linea es 20 +j60 ohm y la impedancia de la carga es 10,30° y los
valores base para el sistema se escojen 480 V y 10KVa en el generador.1. Encuentre las bases de voltaje, corriente, impedancia, y potencia aparente en
cada punto de el sistema.2. Convierta este sistema a su circuito equivalente por unidad.3. Encuentre la potencia suministrada a la carga del sistema.4. Encuentre la potencia perdida en la linea de trasmisión.
a.- Tomando Vbase 480 V y Sbase 10kVA entonces
I base1=Sbase
V base1
=10000480
=20.83
Zbase1=V base1
I base1=48020.83
=23.04
La relación de transformación del transformador es a=1/10 0,1 por lo que el voltaje base en la linea de trasmisión es
46

V base 2=V base1
a=4800.1
=4800
las otras cantidades base son:Sbase2=10kVA
I base2=10000Va4800V
=2083 A
Zbase 2=4800Va2083 A
=2304 oHms
La relación de vueltas del transformador T2 es a= 20/1= 20, entonces el voltaje base en laregión de la carga es
V base3=V base2
a=4800V20
=240V
las otras cantidades base sonSbase3=10kVA
I base3=10000Va240V
=41.67 A
Zbase 3=240V41.67 A
=5.76oHms
b) Para convertir un sistema de potencia a sistema por unidad, cada componente debe dividirse entre su valor base según la región del sistema. El voltaje en por unidad del generador es su valor real dividido entre su valor base:
V G. pu=480<0 ° V1
480V=1.0<0 °
La impedancia de la carga en por unidad también se da por el valor actual dividido entre su valor base
Z linea .Pu=20+ j 60ohm /5.76 ohm=1.736<30 ° Pu
c) La corriente que fluye en este sistema de potencia por unidad es
I pu=V pu
Z tot. pu
=0.569<−30.6 ° pu
así mismo, la potencia de la carga por unidad es
47

Pcarga. pu=I pu2∗R pu=0.569
2∗1.503=0.487 yestoporlapotenciaes 4870W
d) La pérdida de potencia en por unidad en la linea de trasmisión es
Plinea . pu=I pu2∗R linea . pu=0.00282∗10000=28.2W
MAQUINA DE INDUCCION ASINCRONICA
Generalidades El mayor de uso de estas máquinas son como motores trifásicos de
inducción.
Con esta máquina se logra tener un campo magnético rotatorio, dichocampo gira a una velocidad fija (llamada velocidad de sincronía).
La velocidad de rotación se define por: el número de polos magnéticos quetiene el motor por frecuencia de las señales de alimentación que seinyectan en el estator.
En este motor se considera que la generación del par electromagnético selogra por la interacción de los conductores que llevan corriente eléctrica yque hallan ubicadas en un campo magnético rotatorio generado porinducción magnética.
Las partes principales de estas máquinas son: ESTATOR: PARTE FIJA DE LA MAQUINA ROTOR: PARTE MOVIL DE LA MAQUINA
El rotor de una máquina de inducción recibe la energía por inducción,similar a lo que ocurre en un transformador.
El motor de inducción es un motor con una sola alimentación, no habiendocontactos móviles entre el rotor y el estator.
Es un motor más robusto, fuerte, confiable y prácticamente libre demantenimiento.
48

Tiene una eficiencia alta.
Porta corriente alterna tanto en los devanados del rotor como del estator.
Ilustración 51 Maquina asincrónica. Obtenida de máquinas asincrónicas de Miguel Rodríguez(PDF)
49
Ilustración 50 Máquina asincrónica
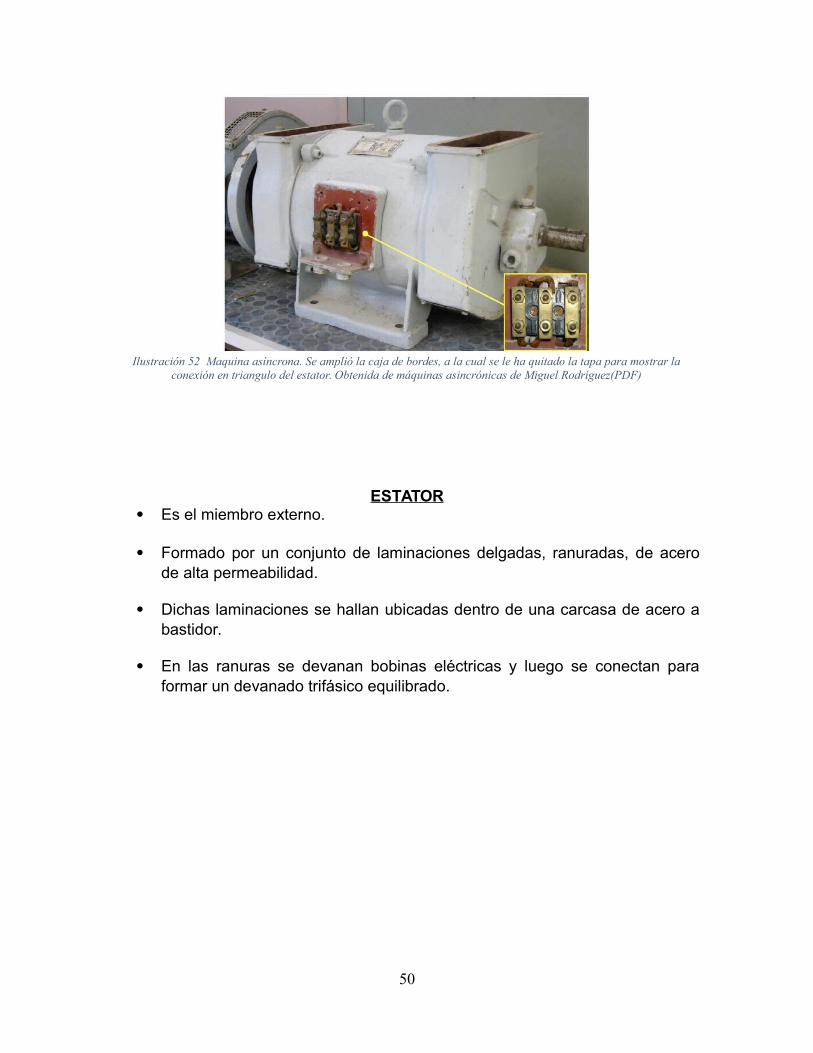
Ilustración 52 Maquina asíncrona. Se amplió la caja de bordes, a la cual se le ha quitado la tapa para mostrar laconexión en triangulo del estator. Obtenida de máquinas asincrónicas de Miguel Rodríguez(PDF)
ESTATOR Es el miembro externo.
Formado por un conjunto de laminaciones delgadas, ranuradas, de acerode alta permeabilidad.
Dichas laminaciones se hallan ubicadas dentro de una carcasa de acero abastidor.
En las ranuras se devanan bobinas eléctricas y luego se conectan paraformar un devanado trifásico equilibrado.
50

Ilustración 53 Estator y carcaza. Obtenida de máquinas asincrónicas de Miguel Rodríguez(PDF)
ROTOR También compuesto de laminaciones delgadas, ranuradas de acero.
Se fijan por presión sobre un eje
Ilustración 54 Obtenida de máquinas asincrónicas de Miguel Rodríguez(PDF)
Existen 2 tipos de rotores
1. ROTOR JAULA DE ARDILLA:
51

Se encuentra totalmente aislado del estator y de posibles terminalesde la parte exterior.
Se usa cuando se requiere un par de arranque reducido.
Ilustración 55 Aletas en un rotor de jaula de ardilla. Obtenida de máquinas asincrónicas de Miguel Rodríguez(PDF)
1.1 Aspectos constructivos. Rotor de jaula
Su simplicidad y gran robustez son las ventajas más destacadas.
2. ROTOR BOBINADO
Se una cuando se requiere un par de arranque alto.
52
Ilustración 56 Rotor jaula

Permite el acceso a los terminales del rotor mediante el uso deescobillas, para modificar los parámetros del mismo.
Un rotor devanado debe tener tatos polos y fases como el estator.
El par que desarrolla el motor suele depender de la velocidad de giroy de la resistencia del estator.
Es más caro y menos eficiente de motor jaula de ardilla.
Ilustración 57 Rotor bobinado o con anillos. Obtenida de máquinas asincrónicas de Miguel Rodríguez(PDF)
53

Ilustración 58 a) Colector de 3 anillos; b) Escobilla c)Anillo de escobilla. Obtenida de máquinas asincrónicas de MiguelRodríguez(PDF)
2.1.Aspectos constructivos. Rotor bobinado.
El circuito rotórico se cortocircuita exteriormente a través de unas
54

escobillas (grafito) que frotan sobre los anillos rozantes.
El inconveniente es su elevado mantenimiento.
Aspectos constructivos.
55
Ilustración 59 Rotor bobinado

Principios de operación
Ns: velocidad de sincronía
Ns=120 fp
=120× frecuencia
¿de polos⇒ [rpm ]
Deslizamiento: SNr: velocidad del rotor
S=Ns−Nr
Ns
S ( )=Ns−NrNs
×100
Motor en reposo: S=1Motor sin carga: S 1
f rotor=( Ns−NrNs ) f estator
f rotor=S f estator
Los polos magnéticos se generan por el flujo de la corriente sobre un
conductor.
56

Para cambiar el número de polos se cambia el diseño físico del motor.
ROTOR ESTATOR
Ilustración 60 Máquina de 2 polos magnéticos
Ilustración 61 Maquina de 4 polos magnéticos
57
MAQUINA DEDOS POLOS
MAGNETICOS

Ilustración 62 Esquema por fase de un motor asíncrono polifásico .Obtenida de máquinas asincrónicas de MiguelRodríguez(PDF)
En el esquema de la la Fig. 10 las magnitudes del rotor f2 E2s y X2s son funciones deldeslizamiento s en consecuencia, varían con la velocidad de giro n de la máquina. En elque caso de que el motor esté parado, estas magnitudes pasan a ser, f1, E2 y
X2, respectivamente.
Ejercicio:Un motor de inducción trifásica, tetrapolar de 208 Vg 60 Hz trabaja a plena carga con una velocidad de 1755 rpm. Calcule
a) Su velocidad de sincroníab) El deslizamientoc) La frecuencia del rotor
a) N 1=120∗604
=1800 rpm
b) S=Ns−Nr
Ns=1800−17551800
=0.025=2.5
c) fr=S festator
fr=0.025 (60Hz )=1.5Hz
CIRCUITO EQUIVALENTE
58
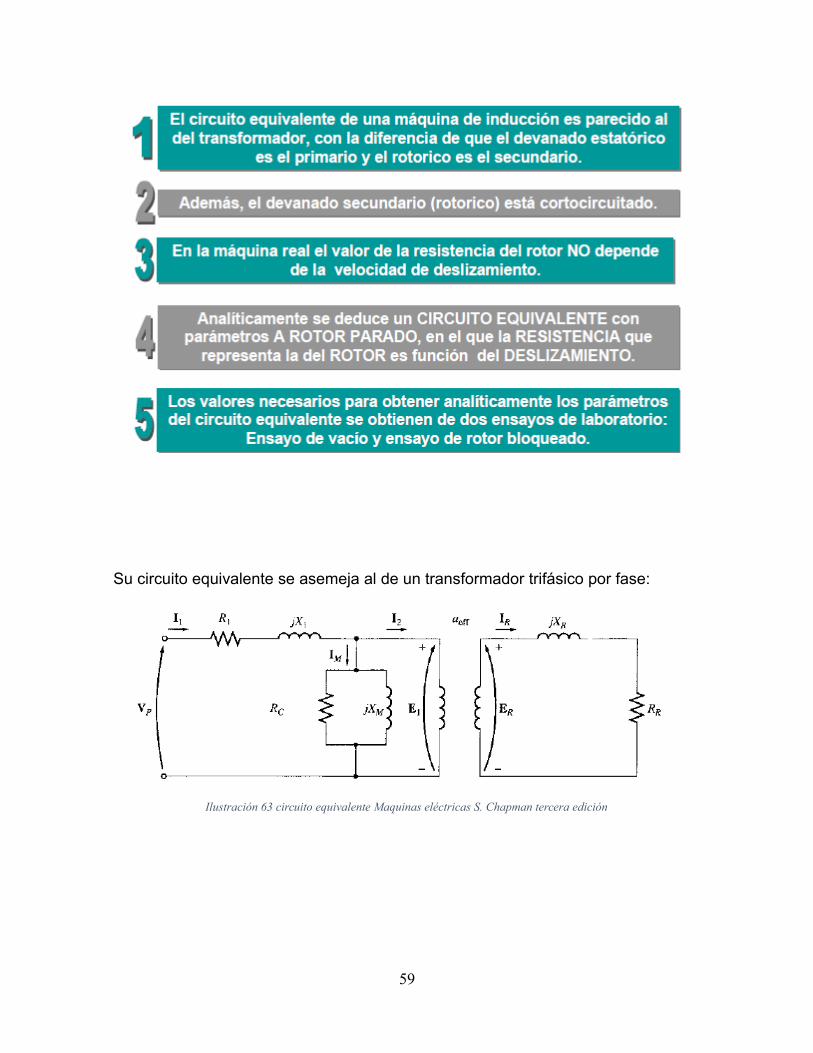
Su circuito equivalente se asemeja al de un transformador trifásico por fase:
Ilustración 63 circuito equivalente Maquinas eléctricas S. Chapman tercera edición
59

Ilustración 64 Circuito equivalente exacto de un motor asíncrono polifásico. Obtenida de máquinas asincrónicas deMiguel Rodríguez(PDF)
Se define adicionalmente: Lb: Reactancia de dispersión por fase del devanado del rotorXb: Reactancia de dispersión por fase del devanado en condición del rotor fijo (S=1)Xr: Reactancia de dispersión por fase del devanado con deslizamiento s.
Xr= 5 xbEb: fem inducido del rotor con S=1.Er: fem inducido del rotor con deslizamiento Er =S EbKw1=factor de devanado para el estatorKw2= factor de devanado para el rotorΦm= amplitud del flujo por fase
Ir=Er
Rr+ j X r
=sEr
R r+ js Xb
¿Er
Rr
s+ j Xb
R r
s→Resistencia efectiva(cuando elrotor seencuentra enreposo)
a=N 1Kw1N 2Kw2
N1: número de vueltas del rotor N2: número de vueltas del estator
60

Ilustración 65 circuito equivalente .Obtenido de Maquinas eléctricas S. Chapman tercera edición
CIRCUITO EQUIVALENTE MODIFICADO DE UN MOTOR TRIFASICO DEINDUCCION EQUILIBRADO POR FASE
CIRCUITO EQUIVALENTE POR FASE REFERIDO AL ESTATOR
Ilustración 66 circuito equivalente por fase referido al estator. Obtenido de Maquinas eléctricas S. Chapman terceraedición
Donde:R2=a2Rr
X2=a2 Xb
I2=I ra
E1=I 2∗R2s
+ j I 2 X2
61

IΦ=I c+ Im
I c=E1R c
Im=E1j X m
~I 1=
~I ϕ+
~I 2
~V 1=
~E1+
~I1(R1+ j X 1)
Potencia alimentada al rotor:I 22R2S
=P r
Perdida del cobre:I22 R2=Pc
→ Potencia por fase del motor:
Pr−P c=I 2R2S
−I 2R2=I22 R2( 1−S
S )
⟹R2S=R2+R2( 1−S
S )
R2:Resistencia realdel rotor
R2(1−SS ) :resistencia⏟
↓Equivalenteelectrico delacargamecanicasobreelmotor
decargaodinamica
CIRCUITO EQUIVALENTE EXACTO DE UN MOTOR DE INDUCCIÓN TRIFÁSICO EQUILIBRADO PORFASE: (VISTO DESDE EL ESTATOR)
62

Ilustración 67 circuito equivalente exacto de un motor de inducción trifásico equilibrado por fase: (visto desde elestator). Obtenido de Maquinas eléctricas S. Chapman tercera edición
Principio de Funcionamiento. Recapitulación.
63

RELACIONES DE POTENCIA:
Pin=3V 1 I1 cosθ
θ :Diferenciade fase entre~V 1e
~I 1
Pérdidas enel estator :Pes=3 I 12R1
Perdidamagnética :Pm=3 I c2Rc
Potencia en el entrehierro: Potencia neta que cruza el entrehierroPag=P¿−Pest−Pm
Pag→entregadaa la resistencia R2/ s
⇒Pag=3 I2
2 R2s
Perdida de potencia en el rotor:
64

Protor=3 I 22 R2
⇒Protor=s Pag
Potencia desarrollada en el motor:Pd=Pag−Protor
Pd=Pag−s Pag
Pd=Pag (1−s )
Pd=S Pag
S=(1−s )=N r
N s
=W r
W s
S: velocidad por unidad (normalizada) del motor:
Par electromagnético del motor:
T d=Pd
W r
=Pag
W s
=3 I 2R2sW s⇒Potencia de salida del motor: Po
Po=Pd−Pr
Donde Pr: Pedida por rotación: Incluye Fricción
Perdida por el aire Pwf
Perdidas por cargas mecánica
parasitas Pst
Ƞ=Po
P¿
x100
65

Ilustración 68 Balance de potencias de un motor asíncrono. Obtenida de máquinas asincrónicas de MiguelRodríguez(PDF)
Ilustración 69 Balance de potencias
66

EJERCICIO
Un motor de inducción trifásico, hexapolar de 230V , 60Hz y conectado enY tiene los siguientes parámetros por fase:
R1=0.5Ω, R2=0.25Ω, X1=0.75Ω, X2=0.5Ω, Xm=100Ω,R c=500Ω. La pérdida por
fricción y viento es de 150W . Determine la eficiencia del motor a su
deslizamiento especificado de 2.5 y el par electromagnético del motor.
NS=120∗606
=120 rpm
wS=125.66 rad /seg
s=0.025
Voltaje por fase V 1=230
√3=132.79(V )
ROTOR
Z2=R2s+ j X2=
0.250.025
+ j 0.5
Z2=10+ j 0.5(Ω)
ESTATORZ1=R1+ j X1
Z1=0.5+ j 0.75(Ω)
67

1Zeq
=1Rc
+1jXm
+1Z2
Zeq=9.619+ j1.417 (Ω)
Z1=Z1+ Zeq=10.119+ j2.167 (Ω)
Corriente estator →~I 1=~V 1
Z¿
=12.832∠−12.09°(A)
Factor de potencia →fp=cos (12.09 )=0.978 en atraso
P¿=3V 1 I 1cosθ=4998.54W
Pest=3 I 12R1=246.99W
~E1=
~V 1−
~I 1~Z1=124.763∠−3.71 ° (V )
~I c=~E1R c
=0.25∠−3.71° ( A )
~Im=~E1jXm
=0.248∠−93.71° (A )
~I∅=
~I c+
~Im=1.273∠−82.38° ( A )
I2=I1−I 0=12.461∠−6.59°(A)
Pnucleo=3 Ic2Rc=93.75(W )
Potencia en el entre hierro Pag=P¿−Pest−Pnuc=4657,8W
Protor=3 I 22 R2=116,16W
Potencia desarrollada Pd=Pag−Protor=4541,34
Po=Pd−Pm=4391,34
η=PoP¿
∗100=87.9
Ts=Pag
Ws=37Nm
Circuito Equivalente del motor de Inducción Trifásico por fase
68

REFERIDO AL ESTATOR
Ilustración 70 Circuito Equivalente del motor de Inducción Trifásico por fase (referido al estator)
Motor Monofásico de Inducción.-Características: - Se usan generalmente para: calefacción, enfriamiento y ventilación
- Generan menos de 1hp de potencia
- Puede funcionar con dos teorías: -Teoría del doble campo rotatorio
-Teoría del campo cruzado
- Son mucho más numerosos que los polifásicos.
Parámetros:Nr: Velocidad sincrónica del rotorNs: Velocidad sincrónica del estator
S=N s−N r
N r
=1−N r
N s→sentidohorario
Sb=−N s−N r
−N s
=1+N r
N s
=2−s→sentidoantihorario
En reposo N r=0→S=Sb=1
CIRCUITO EQUIVALENTE DE UN MOTOR INDUCCIÓN MONOFÁSICO CON DESLIZAMIENTO:
69
Ilustración 71 circuito equivalente de un motor inducción monofásico con deslizamiento

Descomposición de un vector pulsante en 2 vectores giratorios iguales y opuestos
Ejemplo: Un motor de inducción monofásico, tetrapolar, de 115 V y 60 Hz. Estángirando en sentido de las manecillas del reloj con velocidad de 1.710 rpm.Determinar su deslizamiento por unidad a) en el sentido de la rotación b) en elsentido opuesto. Si la resistencia del rotor en reposo es de 12,5Ω, determine laresistencia efectiva del rotor en cada rama.
a) N s=120 x604
=1800 rpm
S=1800−1.710
1800=0,05→5
b) Sb=2−0,05=1.95→Sb=1,95
- Debido a la presencia de una alimentación monofásica, la cual exita al estator,este flujo no es rotatorio, por lo tanto no se mueve el rotor.- El flujo magnético del rotor se opone al del estator (Ley de Lenz).- Como los 2 flujos se hallan en el eje vertical, no se produce un torque => el rotorno girará- La teoría del campo doble rotatorio, permite la aplicación de los principios delmotor polifásico a la máquina monofásica.→ Un campo magnético estacionario puede descomponerse en 2 campos
magnéticos rotatorios iguales en magnitud pero girando en direcciones opuestas.∅T=∅mcos (ωt )
Densidad de flujo máxima
2 flujos componentes: ∅1 y∅2 , tal que
∅1=∅2=0,5∅m
∅1 giro de sentido horario
∅1 giro de sentido antihorario
70

Rampa anterior
Rampa posterior
- Los 2 campos giran sincrónicamente en sentido opuesto.- Se induce fem debido a c/campo giratorio (fem opuesta)=> Corrientes circulares en sentido opuesto => Torque neto = 0 => El motor arranca por medios auxiliares en cualquier dirección de uno de los 2 campos
CIRCUITO EQUIVALENTE:
Resistencias efectivas:
Rama anterior 0.5R210
=125Ω
Rama posterior 0.5R25b
=0.5 R22−s
=3.2Ω
Control De Velocidad En Motores De Inducción
71
Ilustración 72 Circuito equivalente

Ilustración 73 Curva par velocidad de una maquina asíncrona polifásica a v1 y f1 constantes. Obtenida de máquinasasincrónicas de Miguel Rodríguez(PDF)
En este régimen de funcionamiento la velocidad n del motor varía entre 0 y la desincronismo n1, lo que quiere decir que el deslizamiento s varía entre 1 y 0. Por lotanto, funcionando como motor la velocidad de la máquina es del mismo sentidoque la de sincronismo y de menor valor que Esta.Al realizar el balance de potencias se adoptó el criterio de siglos de suponer queIas potencias son positivas cuando la máquina actúa como motor luego en estascondiciones tanto Pa como Pmi son positivas. Por lo tanto, en un motor asíncronola máquina absorbe potencia eléctrica por el estator para convertirla en potenciamecánica en su eje.En este caso tanto el par como la velocidad tienen signo positivo. Por lo tanto, elpar está a favor de la velocidad y se trata de un par motor. Es este par el queprovoca el giro de la máquina.
Para un funcionamiento óptimo: deslizamiento a plena carga ≤
deslizamiento crítico.
Para controlar la velocidad del motor se puede controlar mediante: La frecuencia del voltaje suministrado.
El número de polos
Con el voltaje aplicado
La resistencia de la armadura
72

Introducción de una FEM externa en el circuito del rotor.
Curva par-velocidad de un motor asíncrono polifásico
Ilustración 74 Curva par-velocidad de un motor asíncrono polifásico a v1 y f1 constantes. Obtenida de máquinasasincrónicas de Miguel Rodríguez(PDF)
1. Control de Frecuencia.
Velocidad de operación puede incrementar o disminuir aumentando o reduciendo la frecuencia de la fuente de voltaje aplicado, suele utilizarse fuentes de frecuenciavariable.
2. Cambio de los polos del Estator.
Generalmente usado para motores de jaula de ardilla.
Este método proporciona es muy sencillo para motores de múltiple
devanado.
Proporciona buena regulación de velocidad.
Alta eficiencia a cualquier velocidad.
3. Control de la Resistencia del Rotor.
73

Usado para motores de inducción de rotor devanado.
Su velocidad se puede reducir agregando una resistencia externa en el
circuito del rotor.
Puede producir:
Aumentando en la pérdida del cobre del rotor.
Aumentando la temperatura de operación del motor.
Reducción de la eficiencia del motor.
4. Control de Voltaje en el Estator.
El par desarrollado por el motor es proporcional al cuadrado del voltaje
aplicado.
o Depende del voltaje del estator.
Método sencillo pero poco usado, ya que para lograr un cambio apreciable
de velocidad.
5. Introducción de una FEM en el rotor.
Usado generalmente en motores de rotor devanado.
Se introduce una fem adicional en el rotor.
Frecuencia de la fem adicionada igual frecuencia del rotor.
Se puede aumentar o disminuir la resistencia en el rotor, aumentando o
disminuyendo la corriente en el mismo ≥ cambia la velocidad en el rotor.
También se logra un cambio de velocidad aumentando o disminuyendo la
magnitud de la fem inducida.
Consulta: Controladores de estado sólido para motores de inducción.
74
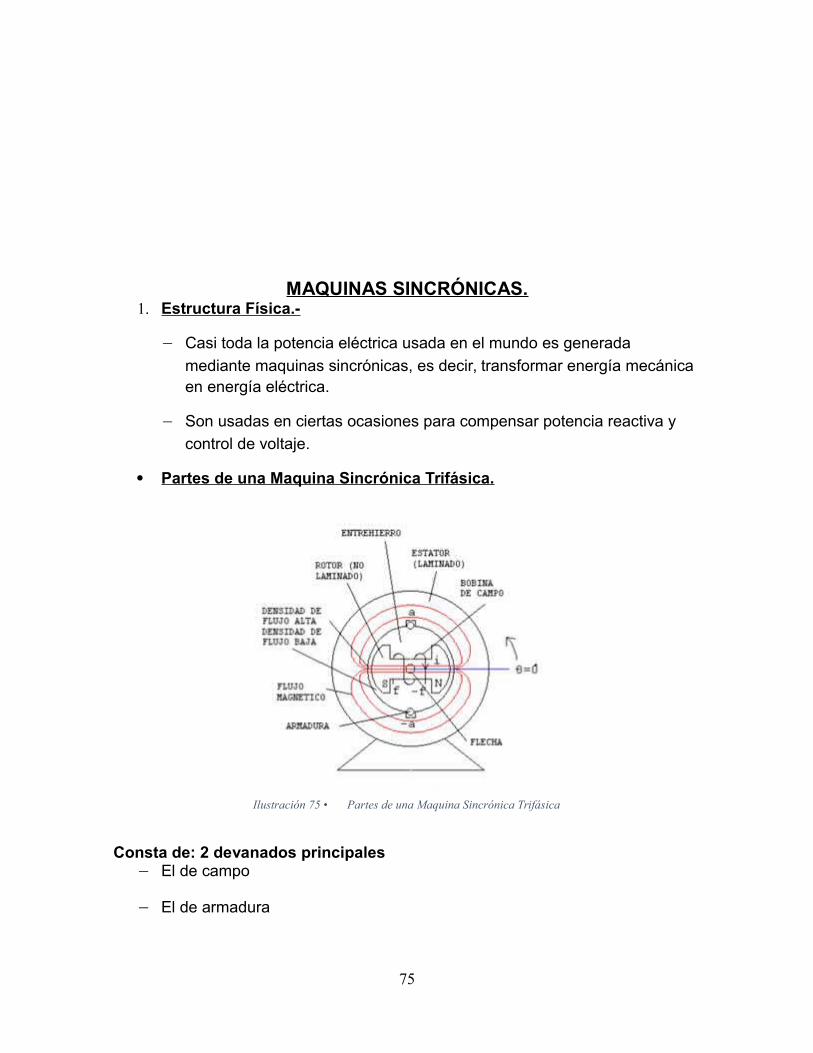
MAQUINAS SINCRÓNICAS.1. Estructura Física.-
Casi toda la potencia eléctrica usada en el mundo es generada
mediante maquinas sincrónicas, es decir, transformar energía mecánica en energía eléctrica.
Son usadas en ciertas ocasiones para compensar potencia reactiva y
control de voltaje.
Partes de una Maquina Sincrónica Trifásica.
Ilustración 75 • Partes de una Maquina Sincrónica Trifásica
Consta de: 2 devanados principales El de campo
El de armadura
75

El devanado de campo es alimentado con una fuente de corriente directa
para producir un campo magnético fijo que induce el voltaje de corriente alterno en el devanado de armadura, una vez que cualquiera de los 2 están en movimiento.
Tiene doble excitación:
El devanado de armadura de una maquina sincrónica es similar al
devanado del estator de un motor de Inducción Trifásico.
La diferencia entre las 2 máquinas está en el rotor.
La fuente de alimentación de corriente continua del devanado de campo puede ser:
Una fuente de dc variable.
Un imán permanente sin control independiente de campo
Aprovechar el voltaje inducido en el rotor y rectificarlo para aplicar el d. de
campo.
ESTATOR: Conocido como devanado de armadura.
nsin=120 fp nsin=velocidad delcampomagnetico de la armadura
f=frecuencia de la ¿
p=número de polos
ROTOR: Conocido como devanado de campo
Es alimentado por una fuente de dc. Para crear un electroimán para
controlar la magnitud del campo.
Se tiene 2 tipos de rotores:
Rotores de polos lisos o cilíndricos (alta velocidad)-> TURBINA DE
VAPOR
76
Rotores de polos salientes (baja velocidad)-> TURBINA
HIDRÁULICA
Características físicas del ESTATOR: Esta formada por laminaciones delgadas de acero sumamente permeable
(reducir pérdidas en el núcleo).
Se mantiene juntos por medio de un bastidor
El bastidor se construye por medio de un acero suave, creado no para
conducir flujo, sino para dar apoyo mecánico al generador.
el estator tiene ranuras cuyo objetivo es alojar los gruesos conductores de
los bobinados.
La fem inducida por fase en generadores síncronos es de gran tamaño, en
el orden de los KV, con capacidad de generación que se mide en megavolt-amperes (MVA)
Características físicas del ROTOR: Tiene tantos polos como el estator.
Su devanado conduce corriente directa
Los rotores cilíndricos tienen ventajas como:
Operación a velocidad altas
Mejor equilibrio
Reduce pérdidas por viento.
el rotor de polos salientes presenta pérdidas pequeñas en su devanado.
77

Ilustración 76 Polos del rotor
Características constructivas
78

→Estructura de la máquina síncrona. Estátor y rotor.
Ilustración 77 Estructura de la máquina síncrona. Estátor y rotor.
CIRCUITO EQUIVALENTE. Generalmente se usa el modelo para un rotor cilíndrico:
79

Ilustración 78 circuito equivalente.(modelo para un rotor cilíndrico)
CIRCUITO EQUIVALENTE DE UN GENERADOR SINCRONOEa=voltajede lasterminales de las armaduras
V Ø=voltaje de fase ( se convertir áen volajede teminal dependiendo de la conexi ón Δ−Y )
X S=reactancia s í ncrona
X s=Xm+Xd Xm :Reactancia demagnetizaci ó n
Xd :Reactancia dedispersi ó node fuga.
Vf=fuente decorriente directa .
RVAR :Resistenciaexterna variable paracontrol devoltaje→opcional
V ∅=Ea−I a (Ra+ j X s )
I f=V f
R f+RVAR
En conexión Y: I f=I R , en conexión Δ: V l=V f
Vl=√3V f Il=√3 I f
Regulación de Voltaje:
RV =Ea−V ∅
V ∅∗100
Ejercicio: Un generador síncrono de 9KVA, 208 V, trifásico y conectado en Y tieneun devanado con resistencia 0.1Ω/fase y una reactancia síncrona de 5.6Ω/fase.Determine su regulación de voltaje cuando el factor de potencia de la carga es a)80% en atraso, b) la unidad y c) 80% en adelanto.
V a=208
√3=120V I a=
9000120∗3
I a=corriente de fase
I a=25A
80
a) f p =0.8 en retraso ⇒ θ=−36.87 °
~Ea=120+(0.1+ j5.6 )∗25∠−36.78 °~Ea=233.77∠28.21° V
RV =233.77−120
120∗100=94.8
b) f p =1 ⇒ θ=0°
~Ea=120+(0.1+ j5.6 )∗25∠0 °
~Ea=186.03∠48.81 °V
RV =186.03−120
120∗100=55.03
c) f p =0.8 en adelanto ⇒ θ=36.87°
~Ea=120+(0.1+ j5.6 )∗25∠36.78°~Ea=119.69∠71.49 °V
RV =119.69−120
120∗100=−0.26
RELACIONES DE POTENCIA:
POTENCIA MECANICA: Pm=T sW s (impulsador primario)
T s : Par dado por la excitación externa.
W s : Velocidad de la excitación externa.
POTENCIA ENTRADA ⇒ P¿=Pm+V f I f
I f : Constante Por fuente de
excitación dc P¿=T sW s+V f I f
POTENCIA SALIDA: Po=3V a I a cosθ
Pérdida en el cobre armadura: Pcu=3 I a2Ra Pd=Po+P¿
Pérdidas adicionales: Pr=¿ Pérdidas por rotación (constante).
81

Pst=¿ Pérdidas por carga parásita (constante).
∫¿=3V a I a cosθ+3 I a2Ra+P r+Pst+V f I f
⇒P¿
Pconstante :P c=Pr+Pst+V f I f ⇒ ∫¿=Po+Pcu+Pc
P¿
P∫¿=
3V a I a cosθ
3V a I a cosθ+3 I a2Ra+Pc
η=Po
¿
Condición de eficiencia máxima: Pc=3 I a2Ra
∫ ¿−P c
Potenciadesarrollada=+Pco=P¿
→η=P0
Pd+Pc
Torqueaplicado por el impulsor primario
T j=P¿
w s
donde Pm=Pd+Pr
Pm=potenciamec ánica en términos de la potenciaeléctrica de la entrada
Ejemplo: Un generador, trifásico de 9KVA, 208V, 1200 rpm, 60Hz y conectado enY, tiene una resistencia en el devanado del campo de 4,5Ω. La impedancia del
devanado de la armadura es de (0.3+ j5 )(Ωfase
) . Cuando el generador opera a
plena carga con un factor de potencia de 0.8 en atraso, la corriente en eldevanado de campo en 5A. La pérdida por rotación es de 500w. Determinar a) laregulación de voltaje, b) la eficiencia del generador, c) el par aplicado por elimpulsor.
η=P0P¿
RV =Ea−V a
V a
∗100
82

a) V a=208V
√3=120V→~V a=120∠0
0
I a=9000120.3
=25→~I a=25∠−36.870
~Ea=~V a+
~I a(Ra+ j X s)
~Ea=120∠0
0+25∠−36.870∗(0.3+ j 5 )(V )
~Ea=222.534∠25.41
0
RV =85.45
b) P0=3V a I a f p=2∗120∗25∗0.8=7200w→Potencia de entrada
Potenciade p érdidaenel núcleo :Pn=3Ra I a2=3∗(25 )2 (0.3 )=562.5w
Potenciadesarrollada :Pd=Pc+Pη=87762.4w
Otra forma dec á lculode Pd→Pd=3Re (Ea . I a¿)=7762.4w
Pc=Protor+Pag+V f I f=500+25∗4.5=612.5w
→P¿=P0+Pc+Pη=8375w
η=72008375
∗100=0.86→η=86
W s=2 π∗12060
=40πrads
Pmr=Pd+Pr=7762,5+500=8262,5W
T e=8262,540π
=65.75N .m
OPERACIÓN EN PARALELO DE G.S. La generación, transmisión y distribución debe realizarse de la forma más
eficiente, confiable y segura posible, con un costo razonable.
Eficiencia: G.S. funcionando con eficiencia máxima a plena carga o cerca a
ella.
La demanda de energía fluctúa entre carga ligera-carga considerable en
forma periódica durante un intervalo de tiempo. Es casi imposible operar alalternador siempre a su frecuencia máxima.
CONFIABILIDAD.- el consumidor no debe notar perdidas de energía en elsistema.
83

Debido a ese criterio no puede ser un solo alternador dar las características
de eficiencia y confiabilidad para el funcionamiento de un sistema eléctrico.
Se usa un sistema central para garantizar eficiencia y confiabilidad donde
existe un número de generadores sincrónicos en paralelo para satisfacer lademanda.
La conexión en paralelo permite conectar o desconectar alternadores según
la demanda del sistema.
La línea conductora a la que van conectados los alternadores se llama
conductor o bus infinito, donde se encuentra inclusive no solo generadoressino centrales.
Para conectar el alternador al conductor infinito se debe cumplir:1. El voltaje de línea del alternador que entra debe ser el mismo que el voltaje
que es casi constante del conductor infinito.
2. La frecuencia del alternador también debe ser la misma.
3. Las secuencias de fases del alternador entrante también debe ser la mismaque las secuencias de fases del conductor infinito.
PASOS DE CONEXIÓN.Paso1.- el alternador se impulsa a la velocidad especificada, o cerca de ella, y lacorriente del campo aumenta hasta el nivel en el que el voltaje sin carga es casiigual al del sistema, este voltaje es revisado por un voltímetro colocado entre 2líneas del alternador entrante, cuando el interruptor está abierto.Paso2.- Para comprobar la secuencia de fase se colocan asimétricamente 3lámparas, cuando la secuencia de fase de B es la misma que A, la lámpara L1está apagada mientras las otras iluminadas, sino las 3 están prendidas oapagadas.
84

Paso3.- cuando al secuencia de fase es la apropiada y la frecuencia de B esexactamente igual a la de A, la lámpara L1 permanece apagada, y las otras dosencendidas. Cualquier desfase obliga a las 3 lámparas a pesar de estar apagadasa encendidas en orden sucesivas, se conecta además un sincronoscopio (mide lacondición de sincronía) en una de las fases. Si hay diferencia de velocidad semodifica controlando la alimentación de energía mecánica del alternador (impulsorprimario).Paso4.- se cierran los interruptores cuando
a) Vb=VL
b) L1 apagada y L2, L3 prendidas.
c) El sincronoscopio en posición vertical (posición cero diferente de fase)
Cuando B entra en línea (interruptor cerrado) no está recibiendo ni alimentandoenergía (estado flotante del alternador).CIRCUITO DE DOS G.S. OPERANDO EN PARALELO (POR FASE)
IL= corriente de cargaZL= impedancia de cargaIa1, Ia2= corriente de la armaduraV a=Ea1−I a1Zs1=Ea2−I a2Zs2=I LZ L
I L=I a1+ I a2
Ea1=I a1Zs1+ I L ZL
¿ I a1Z s1+ I a1ZL+ I a2Z L
Z(¿¿ s1+Z L)+ I a2Z L
¿ I a1¿
De igual formaZ
(¿¿ s2+Z L)+ I a1Z L
Ea2 ¿ I a2¿
Manipulando ecuaciones
85

ZZL(¿¿ s1+Zs2)+Zs1Zs2
I a1=(Ea1−Ea2 )Z L+Ea1Z s2
¿
ZZL(¿¿ s1+Zs2)+Zs1Zs2
I a2=(Ea2−Ea1 ) ZL+Ea2Zs1
¿
~I L=~Ea1 ZS2+
~Ea2 ZS1
ZL ( ZS1+ ZS2 )+ ZS1 ZS2
~V a=~I L ZL
Ejercicio: Dos generadores síncronos, trifásicos, conectados en Y tienen voltajes
generados por fase de 120∠10 ° y 120∠20° [V], en condiciones sin carga y
reactancias de j5Ω/fase y j8Ω/fase, respectivamente. Están conectados enparalelo a una impedancia de carga de 4+j3Ω/fase. Determine:
a) El voltaje por fase en las terminales.
b) La corriente de armadura de c/generador.
c) La potencia suministrada por c/generador.
d) La potencia total de salida.
~Ea1=120∠10 ° [V ]
~Ea2=120∠20° [V ]
Z S1= j 5 [Ω ] ; ZS2= j8 [Ω ] ; ZL=4+ j3 [Ω ]=5∠36,87 ° [Ω ]
a)~V a=82,17∠−5,93° [V ]
b)~I a1=9,36∠−51,17 ° [ A]
~I a2=7,31∠−32,06 ° [A ]
⇒~I L=~I a1+~I a2
~I L=16,44∠−42,8 ° [A ]
86

c)
~V a.~I a1∗¿¿
PO1=3 Re ¿
~V a .~I a2∗¿¿
PO2=3 Re ¿
d) PO=PO 1+PO2=3242,5[W ]
MOTOR SÍNCRONO.-
ESTRUCTURA Y FUNCIONAMIENTO.-- La armadura de un motor síncrono es igual al de un generador.
87

- N s=120 fP
- Un motor síncrono no puede arrancar por sí mismo, para lo cual se añadeun devanado adicional llamado devanado amortiguador o devanado deinducción.
- El devanado de inducción puede ser de 2 tipos: jaula de ardilla o de rotordevanado.
- El devanado amortiguador sirve también para controlar la oscilación en elmotor ya que produce pares de amortiguación cuando el rotor gira a mayorvelocidad cuando la carga del motor varía.
- Al devanado de armadura colabora únicamente con el arranque del motorpara que la velocidad del rotor adquiera una velocidad muy parecida a la desincronía.
Circuito Equivalente
Para Rotor Cilíndrico:
Circuito Equivalente de un Motor Sincrónico por Fase~Va=
~Ia (Ra+ jXs )+
~Ea
~Ia=~Va−~Ea
Ra+ jXs
88

Ns=120 fp
- Puede funcionar con un factor de potencia en atraso, unitario o en adelanto simplemente controlando su corriente de campo. (Mediante la fem inducida en el rotor).
Pin=3Va Iacosθ+Vf If
Pd=3Va Ia cosθ−3 Ia2Ra=Pot Pr
Td=PdWs
n=PoPin
Ejemplo:Un motor sincrónico, trifásico, de 10Hp, 230V, 60Hz, conectado en Y suministra plena carga con un factor de potencia de 0.707 en adelanto. La
reactancia sincronica del motor es de j 5Ωfase . La perdida por rotación es
de 230W y la perdida en el devanado de campo es de 70W. Calcule el voltaje generado y la eficiencia del motor. Desprecie las resistencias en el devanado de armadura.Po=10∗746=7460W
Pd=3Va Ia cosθ−3 Ia2Ra=Pot Pr
Pd=7460+Pr¿7.690W
Ia=Pd
√3∗230V∗0.707
Ia=27.3 A
Pin=7.690+70=7.760W
n=PoPin
=0.961=96.1
V a=139.790 [V]
V a=27.3∠ 45 [A]
89

Ea = 248.8 ∠ -22.8 [V]
2) Un motor síncrono, trifásico, tetrapolar, de 2hp, 120 V, 50 Hz conectado en Y,tienen una impedancia síncrona de 0,2+j6π/fase. La pérdida de fricción y viento esde 20W, por rotación es de 100W.La devanada de campo es de 30W. Calcular la eficiencia del motor y el voltajeinducido y la velocidad de sincronía.
MÁQUINA DE CORRIENTE CONTINUA Consta de dos partes:
ESTATOR
Proporciona el apoyo mecánico para la máquina.
Consta del yugo y los polos (polos de campo).
El yugo desempeña la función básica de proveer una trayectoria
sumamente permeable para el flujo magnético.
Los polos se colocan dentro del yugo, en donde se hallan los devanados de
campo.
90

Polos formados con laminaciones.
Existen 2 tipos de devanadas de campo:
Devanado del campo short (máquina short) - Devanado de campo serie (máquina serie)
El devanado de campo short: -tiene muchas vueltas de alambre delgado.
-se conecta en paralelo con el devanado de laarmadura.
El devanado de campo serie: -Se conecta en serie con el devanado de
armadura.
-Tiene pocas vueltas de alambre grueso.
ROTOR
Cubierta por polos fijos del estator.
Se llama armadura.
Su sección transversal es circular y laminada de forma delgada y
permeable, aislados eléctricamente.
Su bobinado generalmente son hechas con cobre (elemento de baja
resistividad).
El devanado de armadura viene a ser el corazón de una máquina de c.c.,
ya que es aquel donde se induce la f.e.m. y se desarrolla el par.
El devanado de armadura va conectado a un conmutador, que tiene el
papel de rectificador, ya que convierte la fase alterna inducida en losbovinos de armadura en un voltaje unidireccional.
Para proteger el conmutador se usa escobillas.
El conmutador está construido de segmentos de cobre en forma de cuña.
Está montado rígidamente sobre el eje.
Los segmentos de cobre están aislados entre sí por medio de láminas de
mica.
Las bobinas de la armadura están conectados eléctricamente a los
segmentos de cobre del conmutador.
91

Según esta conexión se puede dar 2 tipos de bobinas de armadura:
devanado lubricado (o lazo) y devanado ondulado.
FUERZA ELECTROMOTRIZ INDUCIDA
Valor promedio de la fase inducida:Además se definen
Ee=Pπ∗ϕp∗Wm Además se define
Área polar Ap=2∗π∗r∗L
p
Área polar efectiva Ae=Ap∗ᶯ a
Porcentaje de cobertura Donde: de la armaduraP # de polosϕ p : flujo de polos
Wm : velocidad angular de la armadura ϕ p=B∗Ae
f : frecuencia del voltaje inducido en la armadura
f=P
π∗4∗Wm=¿Ec=4∗f∗ϕ p=¿N m=
120∗fp
=¿P∗Wm
120
¿>Nm=120∗f
pWm=
Nm∗2∗π
60f=
P∗Wm∗60
2∗π∗120f=
P∗W m
4∗π
fem inducida en el devanado dela armadura
Ea=K a∗ϕp∗¿ Wm
Donde Ka=Zp
2∗π∗a donde: Z: # total de conductores
Z=2*C*Nc C: # total de bobinas Nc: # de vueltas por bobina a: #de trayectorias paralelas de los flujos a=2 devanado ondulado a=p devanado XXXXXX Es una constante para cada máquina Se le conoce como constante de la armadura
92
Los polos magnéticos cubren toda la periferia de la armadura.
Si la armadura suministra corriente constante a una carga externa: Ia=> La
potencia eléctrica desarrollada por el generador es:
Pd=Ea∗I a=K a∗ϕ p∗Wm∗I a
Es función del tanque => Pd=Td∗Wm transición de fuerza mecanica
Ejercicio:Una máquina dipolar de c.c de 24 ranuras tiene 18 vueltas por bobina. Sudensidad de flujo por polo es 1T.Su longitud efectiva de la máquina es de 20cmy elradio de la armadura de 10cm.Los polos magnéticos están diseñados para cubrirel 80% de la periferia de la armadura. Si la velocidad angular de la armadura es183.2 rad/s. Determine:a) La fem inducida en el devanado de la armadura b) La fem inducida por bobinac) La fem inducida por vuelta d) La fem inducida por conductor
C=24 ; NC=18
Z=2∗C∗NC=2∗24∗18=864
Máquina bipolar: a=2
A P=2πrlp
=2π (0.1 )(0.2)
2=0.063m2
A e=Ap∗0.8=0.05m2
⇒∅p=B∗Ae=1∗0.05=0.05wb
a)
93

K a=Z P2πa
=2∗8642∗π∗2
=137.51
⇒Ea=Ka∗∅p∗wm
Ea=1259,6 v
b) Númerodebobinas por trayectoria=24P=12
fem inducida porbobina=Ebobina
Ebobina=1259.612
Ebobina=104,97v
c) ¿de vueltas/bobina=18
⇒Evuelta=104,9718
=5,83 v
d)
Econd=E vuelta2
=5.832
=2,915 v
Ecuaciones de voltaje interno generado y par inducido en máquinas dcreales
¿Cuánto voltaje produce una máquina dc real? El voltaje inducido en cualquier máquina dependede tres factores:1. EI fIujo Ø en la máquina2. La velocidad w del rotor de Ia máquina3. Una constante que depende dc la contrucción de la máquina
¿Cómo puede determinarse el voltaje en los devanados del rotor de unamáquina dc real? El voltaje de salida del inducido de una máquina real es igual al número de
94
conductores por trayectoria de corriente multiplicado por el voltaje en cadaconductor.
Voltaje en cualquier conductor individual bajo las caras polares:
Voltaje de salida del inducido en una maquina real
Z: # total de conductoresa: # de trayectorias de corrientev: Velocidad de cada conductor en el rotor v=r wr: radio del rotor
Voltaje interno generado en la maquina: se puede expresar de forma másconveniente
Al tener que el flujo de un polo es igual a la densidad de flujo bajo el polo por área
del polo: ∅=B AP
El rotor de la maquina es cilíndrico por lo que su área es: A=2πrl
Si hay polos (P)→ la porción de área asociada a cada polo es el área dividida por
el # de polos: A P=AP=2πrl P
El flujo total por polo es: ∅=B AP=B (2πrl )
P=B2πrl
P
Donde k=ZP2 πa
En revoluciones por minuto
Donde k '=ZP60 a
¿Cuánto par es inducido en Ia armadura de una maquina DC real?En toda maquina DC, el par depende de 3 factores1. EI fIujo Ø en la máquina
2. La corriente de armadura (o rotor) IA en la máquina
95

3. Una constante que depende dc la contrucción de la máquina
¿Cómo se puede determinar el par sobre el rotor de una maquina real ?EI par sobre el inducido de una máquina real es igual al número de conductores Z multiplicado por el par sobre cada conductor
Par en cualquier conductor único bajo Las caras polares
Si hay a trayectorias de corriente → La corriente total del inducido se distribuye
entre las a trayectorias de corriente ↔ La corriente en un so1o conductor está
dada por: I cond=IAa
Par en un solo conductor en el motor: T cond=r I A l B
a
Par inducido total
Para Z conductores, el par inducido total en el rotor es: T ind=r I A l B
a
El flujo por polo: : ∅=B AP=B (2πrl )
P=B2πrl
P
Donde k=ZP2 πa
NOTA: El voltaje interno generado y el par inducido son aproximaciones puestoque no todos los conductores en Ia máquina están bajo las caras polares todo eltiempo y además porque las superficies de cada polo no cubren en su totalidad1/P de Ia superficie rotórica.
Ejemplo
Un inducido con devanado imbricado dúplex se utiliza en una máquina dc de seis polos con seis grupos de escobillas, cada una de las cuales abarca dos segmentos de conmutación.En el inducido de cada una de ellas has 72 bobinas de 12 vueltas. El flujo por polo en la máquina es 0.039 Vb, y la máquina rota a 400 r/rnin.a) Cuántas trayectorias de corriente hay en esta máquina?b) Cual es su voltaje inducido EA?
SOLUCION
96

a) El # de trayectorias de corriente en la máquina?
b) El voltaje inducido en la maquina
• # de conductores
• K’ es
• El voltaje EA
Construcción de las maquinas dc
Ilustración 79 Construcción de las maquinas dc
97

Ilustración 80 Vista diagonal de una maquina dc
Aspectos Constructivos
Aislamiento de los devanados
98

Flujo de potencia y perdidas en máquinas dc Generadores DC → Toman potencia mecánica y producen potencia
eléctrica, Motores DC → Tornan potencia eléctrica y producen potencia mecánica.
No toda Ia potencia de entrada a Ia máquina es útil en el otro lado pues siempre hay alguna pérdida asociada al proceso.
Eficiencia de la maquina DC
Perdidas en máquinas dcLas pérdidas que ocurren en las maquinas DC se dividen en 5 categorías
1. Pérdidas eléctricas o pérdidas en el cobre (pérdidas I2 R )
2. Pérdidas en las escobillas3. Pérdidas en el núcleo4. Pérdidas mecánicas5. Pérdidas misce1únas o dispersas
1. Pérdidas eléctricas o pérdidas en el cobre (pérdidas I2 R )
Las pérdidas en el cobre ocurren en los devanados del inducido y del campo dela máquina. Para los devanados (lel inducido y del campo, las perdidas en el cobre están dadas por
PA = pérdidas en el inducido
99

PF = pérdidas en el circuito de campo
IA = corriente del inducido
I F = corriente de campo
RA = resistencia del inducido
RF =resistencia del campo
La resistencia utilizada en estos cálculos es Ia resistencia del devanado a Ia temperatura normal de operación.
2. Pérdidas en escobillasLas pérdidas por caída en las escobillas corresponden a Ia potencia perdida a través del contacto potencial en Ias escobillas de la máquina.
PBD = Pérdidas por caída en Ias escobillas
V BD = Caída de voltaje en la escobilla
I A = Corriente de! inducido
Se calculan de este modo porque Ia caída de voltaje a través de un conjunto de escobillas es aproximadamente constante en un amplio rango de corrientes del inducido. A menos que se especifique lo contrario, se supone que es normal la caída de voltaje en las escobillas: alrededor de 2 V.
3. Pérdidas en el núcleoLas pérdidas en el núcleo son las pérdidas por histéresis y por corrientes parasitasque ocurren en el metal del motor.
4. Pérdidas mecánicasSon las pérdidas asociadas a los efectos mecánicos. Hay dos tipos básicos depérdidas mecánicas: rozamiento propio y rozamiento con el aire.
Las pérdidas por rozamiento propio son las causadas por fricción de losrodamientos de Ia máquina.
Las pérdidas por rozamiento con el aíre son Ias causadas por fricción entreIas partes móviles de Ia máquina y el aire encerrado en la estructura deella.
Estas pérdidas varían con el cubo de la velocidad dc rotación de lamáquina.
5. Pérdidas dispersas
100

Son las que no tienen importancia el cuidado con que se contabilicen laspérdidas. pues casi siempre algunas quedan por fuera de Ias categoríasmencionadas. Todas esas pérdidas se reúnen en las pérdidas misceláneas . ParaIa mayoría de las máquinas, Ias pérdidas misceláneas se tomanconvencionalmente corno el 1% de Ia plena carga.
Diagrama de flujo de potencia
Una de las técnicas mas apropiadas para explicar las perdidas de potencia en unamaquina es el diagrama de flujo de potencia.Potencia mecánica convertida
Potencia eléctrica resultante
Perdidas eléctricas: I2 R
Diagrama de flujo de potencia de un generado dc
Diagrama de flujo de potencia de un motor dc
101

MOTORES Y GENERADORES DC
Los motores de corriente directa son máquinas dc utilizadas como motores; y losgeneradores dc son máquinas dc utilizadas como generadores.Como se sabe la misma maquina puede operar como motor o como generador,dependiendo de la dirección del flujo de potencia a través de ella.
Introducción a los motores dcLos motores dc fueron los primeros usados, pero los sistemas de potencia acfueron primando sobre los sistemas dc, sin embargo los motores dc se usabanpara sistemas de automóviles, camiones y aviones. Los motores dc también se aplicaban cuando requerían amplias variaciones develocidad., antes de la amplia difusión del uso de inversores rectificadores depotencia electrónicos, los motores dc no fueron igualados en aplicaciones decontrol de velocidad.Los motores dc se comparan frecuentemente por sus regulaciones de velocidad.La regulación de velocidad (sr) de un motor se define como:
SR=wnl−wn
wn
x100
SR=nnl−nn
nn
x100
Esta es una medida aproximada de la forma de la característica par-velocidad de
102

motor, una regulación de velocidad positiva significa que la velocidad del motordisminuye con el aumento de carga y una regulación negativa de velocidadsignifica que la velocidad aumenta cuando aumenta la carga. Hay cinco clases principales de motores dc de uso general:
1. el motor dc de excitación separada2. el motor dc con excitación en derivación3. el motor dc de imán permanente4. el motor de serie5. el motor dc compuesto.
Circuito equivalente del motor dc
El circuito de inducido está representado por una fuente ideal de voltaje EA y unaresistencia Ra. Esta representación es el equivalente theveniin de la estructuratotal del rotor, incluidas las bobinas del rotor, los interpolos y los devanados decompensación, si los hay.La caída de voltaje en la escobilla está representada por una pequeña batería v
103

opuesta en dirección al flujo de corriente de la máquina.Las bobinas de campo que producen el flujo magnético están representadas por la
inductancia lp y la resistencia rf, la resistencia Radj representan una resistencia
exterior variable, utilizada para para controlar la cantidad de corriente en el circuitode campo.El voltaje interno generado en esta máquina está dado por la ecuación:
EA=k∅w
Y el par inducido desarrollado por la máquina está dado por:T ind=k∅ I A
Estas dos ecuaciones, la correspondiente a la ley de voltajes de kirchoff delcircuito del inducido y la curva de magnetización de la máquina.
Curva de magnetización de una máquina dc
El voltaje interno generado ea de un motor o generador dc está dado por laecuación:
EA=k∅w
En consecuencia, EA es directamente proporcional al flujo en la máquina y a lavelocidad de rotación de ella. ¿Cómo se relaciona el voltaje interno generado con la corriente de campo de lamáquina?La corriente de campo en una máquina dc produce una fuerza magnetomotriz decampo, la cual produce un flujo en la máquina de acuerdo con la curva demagnetización.Puesto que la corriente de campo es directamente proporcional a la fuerzamagnetomotriz y EA es directamente proporcional al flujo, es costumbre presentar
104

la curva de magnetización como la gráfica EA contra la corriente de campo a unavelocidad w dada
Motores dc con excitación separada y motores dc en derivación
Circuito equivalente de un motor dc con excitación separada
Circuito equivalente de un motor dc en derivación
105

Un motor dc con excitación separada es un motor cuyo circuito de campo esalimentado por una fuente de potencia separada de voltaje constante, mientrasque un motor dc en derivación es aquel cuyo circuito de campo obtiene supotencia directamente de los terminales del inducito del motor. Si se supone que elvoltaje de alimentación al motor es constante, no hay casi diferencia decomportamiento entre estas dos máquinas. A menos que se especifique locontrario, siempre que se describe el comportamiento de un motor de derivación,también se incluye el motor de excitación separada.La ecuación correspondiente a la ley de voltajes de kirchoff para el circuito delinducido de estos motores es:V T=EA+ I A RA
Motor de imán Permanente• Sus polos están hechos de imanes permanentes, ofrecen muchos mas
beneficios que los motores en derivación, debido que los no requieren de un campo externo.
• Es básicamente la misma maquina que un motor dc en derivación, excepto que el flujo de un motor PMDC es fijo. Por lo tanto, no es posible controlar la velocidad de un motor PMDC variando la corriente o el flujo del campo.
Motor dc serie• Un motor dc serie es un motor cuyo devanado de campo relativamente
consta de unas pocas vueltas conectadas en serie con el circuito del inducido.
106

Motor dc serie• El flujo es directamente proporcional a la corriente del inducido.• Un aumento de flujo en el motor ocasiona una disminución en su velocidad:
el resultado es una caída drástica en la característica de par velocidad deun motor en serie.
Control de velocidad de un motor serie.• Cambiar el voltaje en los terminales del motor. Aumentando el voltaje se
aumenta la velocidad para cualquier para dado.• También puede ser insertando una resistencia en serie en el circuito del
motor, pero esta técnica despilfarra potencia y solo se utiliza en periodosintermitentes durante el arranque en algunos motores.
Motor DC Compuesto• Campo en derivación • Campo en serie.
107

Par velocidad motor dc acumulativo• Tiene un par de arranque mayor que un motor en derivación (cuyo flujo es
constante) pero menor par de arranque un motor DC serie ( cuyo flujo esproporcional a la corriente de inducido )
• Combina lo mejor de el motor en derivación y el motor en serie.
Par Velocidad Compuesto diferencial
• Disminuye el flujo e incrementa de nuevo la velocidad. Como resultado deesto, el motor compuesto diferencial es inestable y tiende a embalarse. Estainestabilidad es peor que la de un motor en derivación con reacción deinducido.
• Es tan mala que un motor en derivación con reacción del inducido. Es tanmala que un motor compuesto diferencial es inadecuado para cualquieraplicación.
ARRANCADORES PARA MOTORES DCPara que un motor dc funcione de manera adecuada, debe tener incorporadoalgún equipo de control y protección especial. Los propósitos de este equipoSon:
108

1. Proteger el motor contra daños debidos a cortocircuitos en el equipo.2. Proteger el motor contra daños por sobrecargas prolongadas.3. Proteger el motor contra daño por corrientes de arranque excesivas.4. Proporcionar la forma adecuada para controlar la velocidad de operación
del motor Para que un motor DC funcione bien, debe ser protegido de daño físico durante elperiodo de arranque. Puesto que la resistencia interna de un motor DC normal esmuy baja comparada con su tamaño (3% a 6% por unidad para motoresmedianos), fluye una corriente muy alta.Una solución al problema de corriente excesiva durante el arranque consiste eninsertar una resistencia de arranque en serie con el inducido para restringir el flujode corriente hasta cuando Ea crezca y sirva de limitante. La resistencia no debeestar en el circuito permanentemente debido a que originaría pérdidas excesivas ycausaría una caída demasiado grande en la característica par-velocidad del motorcon un aumento de la carga.Por otra parte, si la resistencia era cortocircuitada con demasiada lentitud, laresistencia de arranque podía quemarse. Puesto que dependen de una personapara su operación correcta, estos arrancadores de motor estuvieron sujetos alproblema de error humano. En la actualidad han sido casi totalmente desplazadosen las nuevas instalaciones por circuitos automáticos de arranque.
109

CIRCUITOS DE ARRANQUE PARA EL MOTOR DC
• Existe un relé de sobrecarga en cada circuito del arrancador del motor. Si lapotencia
Tomada del motor es excesiva, estos relés se calentaran por encima de su valorfijadoy se abren los contactos normalmente cerrados OL, desenergizando el relé M.Cuando se desenergiza el relé M sus contactos normalmente abiertos se abren Y desconectan el motor de la fuente de alimentación para protegerlo contra daño Por cargas excesivas prolongadas.
Sistema ward-leonard y controladores de velocidad de estado solido.Una de las formas más comunes para variar el voltaje del inducido en un motorDC era proveerlo de su propio generador separado. A continuación se muestracomo se llevaría a cabo este método y cuáles son sus ventajas.
110

Este sistema fue introducido por los años de 1890.
La velocidad de los motores de excitación separada, en derivación o compuestos,se puede variar de tres maneras: cambiando la resistencia de campo, cambiandoel voltaje de inducido o cambiando la resistencia de inducido. De estos métodos,quizá el más útil sea el control de voltaje inducido puesto que permite ampliasvariaciones de la velocidad, sin afectar el par máximo del motor.La velocidad del motor puede ajustarse por encima de la velocidad nominal,reduciéndola corriente de campo del motor. Con tan flexible arreglo, es posiblecontrolar por completo la velocidad del motor, haciendo del sistema Ward-Leonarduno de los métodos más prácticos y confiables para al regulación de velocidad enun motor CC.
Cálculos de eficiencia del motor DCPara calcular la eficiencia de un motor DC:
1. Pérdidas en el cobre2. Pérdidas por caída en las escobillas
111

3. Pérdidas mecánicas4. Pérdidas en el núcleo5. Pérdidas misceláneas
Introducción a los Generadores DCLos generadores DC son máquinas de corriente continua utilizadas comogeneradores. Como se puntualizó antes, no hay diferencia real entre un generadory un motor excepto por la dirección de flujo de potencial. Existen cinco tiposprincipales de generadores DC, clasificados con la manera de producir su flujo decampo.
1. Generador de excitación separada2. Generador en derivación3. Generador serie4. Generador compuesto acumulativo5. Generador compuesto diferencial
Circuito equivalente de un generador DC
Generador de excitación separadaUn generador DC de excitación separada es aquel cuya corriente de campo es suministrada por una fuente externa separada de voltaje DC. El circuito equivalente de tal máquina se muestra en la figura.
Circuito simplificado
112
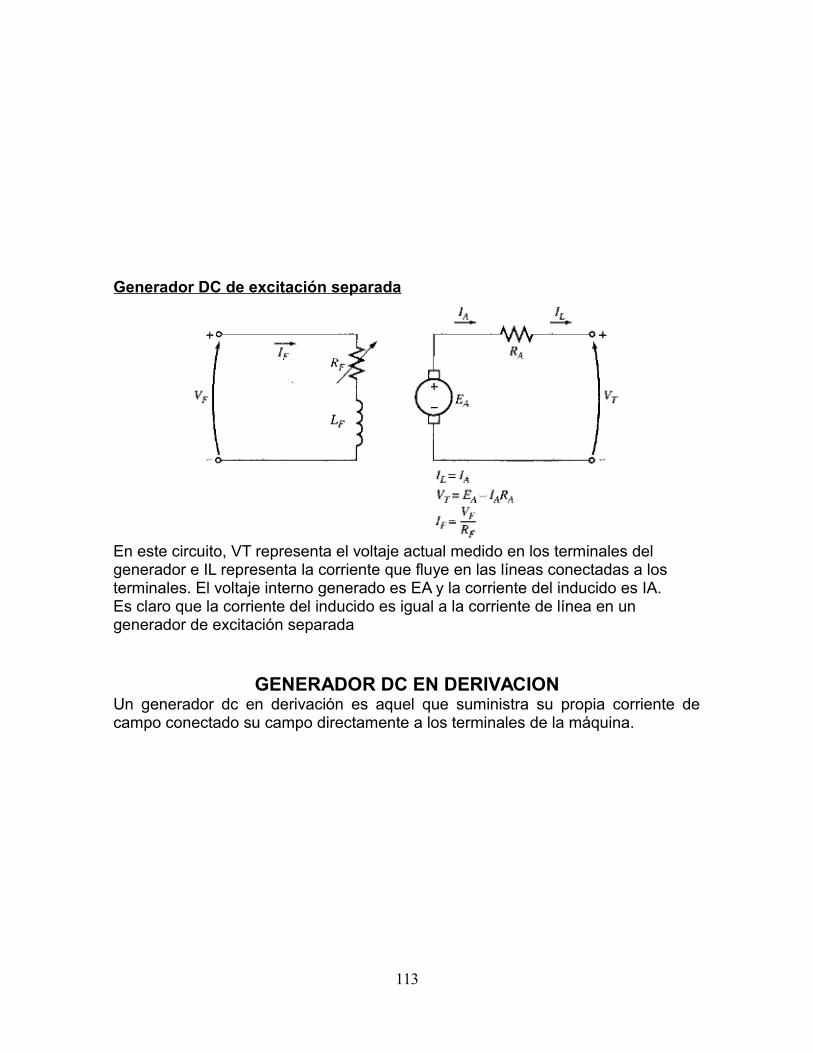
Generador DC de excitación separada
En este circuito, VT representa el voltaje actual medido en los terminales del generador e IL representa la corriente que fluye en las líneas conectadas a los terminales. El voltaje interno generado es EA y la corriente del inducido es IA.Es claro que la corriente del inducido es igual a la corriente de línea en un generador de excitación separada
GENERADOR DC EN DERIVACIONUn generador dc en derivación es aquel que suministra su propia corriente decampo conectado su campo directamente a los terminales de la máquina.
113
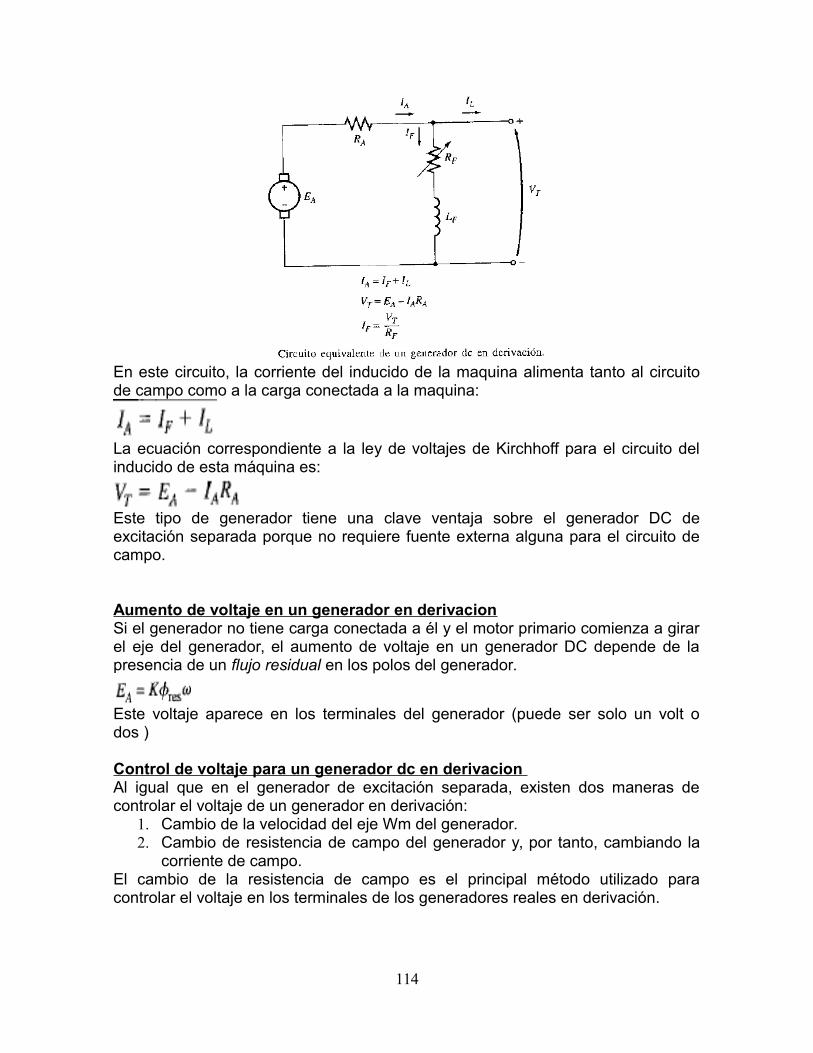
En este circuito, la corriente del inducido de la maquina alimenta tanto al circuitode campo como a la carga conectada a la maquina:
La ecuación correspondiente a la ley de voltajes de Kirchhoff para el circuito delinducido de esta máquina es:
Este tipo de generador tiene una clave ventaja sobre el generador DC deexcitación separada porque no requiere fuente externa alguna para el circuito decampo.
Aumento de voltaje en un generador en derivacionSi el generador no tiene carga conectada a él y el motor primario comienza a girarel eje del generador, el aumento de voltaje en un generador DC depende de lapresencia de un flujo residual en los polos del generador.
Este voltaje aparece en los terminales del generador (puede ser solo un volt odos )
Control de voltaje para un generador dc en derivacion Al igual que en el generador de excitación separada, existen dos maneras decontrolar el voltaje de un generador en derivación:
1. Cambio de la velocidad del eje Wm del generador.2. Cambio de resistencia de campo del generador y, por tanto, cambiando la
corriente de campo.El cambio de la resistencia de campo es el principal método utilizado paracontrolar el voltaje en los terminales de los generadores reales en derivación.
114

GENERADOR DC SERIEUn generador dc serie es aquel cuyo campo está conectado en serie con suinducido.Puesto que el inducido tienen una corriente mucho mayor que un campo enderivación, el campo serie en un generador de esta clase tendrá solo una pocasvueltas de alambre y el conductor utilizado será mucho más grueso que el de uncampo en derivación.Un campo serie se diseña para que tenga la más baja resistencia posible, dadoque la corriente de plena carga fluye a través de él.
La corriente del inducido, la corriente de campo y la corriente de línea son iguales,la ecuación correspondiente a la ley de voltajes de Kirchhoff para esta máquina es:
Características de los terminales de un generador serieLa cueva de magnetización de un generador dc serie se parece mucho a la decualquier generador en vacío.No hay corriente de campo, por tanto Vt se reduce a un pequeño nivel dada por elflujo residual de la máquina.Cuando aumenta la carga, aumenta
115

Los generadores serie se utilizan solo en unas pocas aplicaciones especialesdonde puede explotarse la característica empinada del voltaje del equipo.Una de tales aplicaciones es la soldadura de arco, los generadores en serieutilizados en soldadura de arco se diseñan deliberadamente con gran reacción delinducido, la cual les da una característica de los terminales como la que semuestra en la figura.
Generador dc compuesto acumulativo:Un generador dc compuesto acumulativo es un generador dc con campo serie ycampo en derivación conectados de tal manera que la fuerzas magneto motricesde los dos campos se suman.
116

Los puntos que aparecen en las dos bobinas de campo tienen el mismosignificado que los puntos sobre un transformador: “la corriente que fluye haciaadentro de las bobinas por el extremo marcado con punto produce una fuerzamagneto motriz positiva”.Entonces la fuerza magneto motriz total de la maquina está dada por:Dónde: es la fuerza magneto motriz del campo de derivación. Es la fuerza magneto motriz del campo serie. Es la fuerza magneto motriz de la reacción del inducido.
Las otras relaciones de voltaje y corriente para este generador son:
Otra forma de acoplar un generador compuesta acumulativo es la conexión en “derivación corta” donde el campo serie está fuera del circuito de campo en derivación y tiene una corriente iL que fluye a través de el en lugar de iA :
117

Control de voltaje en generadores dc compuestos acumulativos:Las técnicas disponibles para controlar un generador dc compuesto acumulativoson as mismas que se utilizan para controlar el voltaje de los generadores dc en
derivación: 1. Cambio de la velocidad de rotación. Un aumento en w causa que
aumente , incrementándose el voltaje en los terminales
2. Cambio en la corriente de campo. Una disminución en Rf causa que aumente, lo que incrementa la fuerza magneto motriz total en el generador. Como aumenta, el flujo Φ en la maquina aumenta y se eleva.
Finalmente un aumento en Ea eleva Vt.
Análisis de los generadores dc compuestos acumulativos:las siguientes ecuaciones son clave para describir las características en terminalesde un generador dc compuesto acumulativo. La corriente equivalente del campo derivación ieq, debida a los efectos del campo serie y de la reacción del inducido, esta dada por:
Por lo tanto, la corriente efectiva de campo en derivación de la maquina es:
La corriente ieq representa una distancia horizontal a la izquierda o la derecha de la línea de resistencia de campo a lo largo de los ejes de la curva de magnetización.Para encontrar el voltaje de salida para una carga dada se determina el tamaño del triángulo y se halla el punto donde el triángulo encaja exactamente entre la línea de corriente y campo y la curva de magnetización.
118
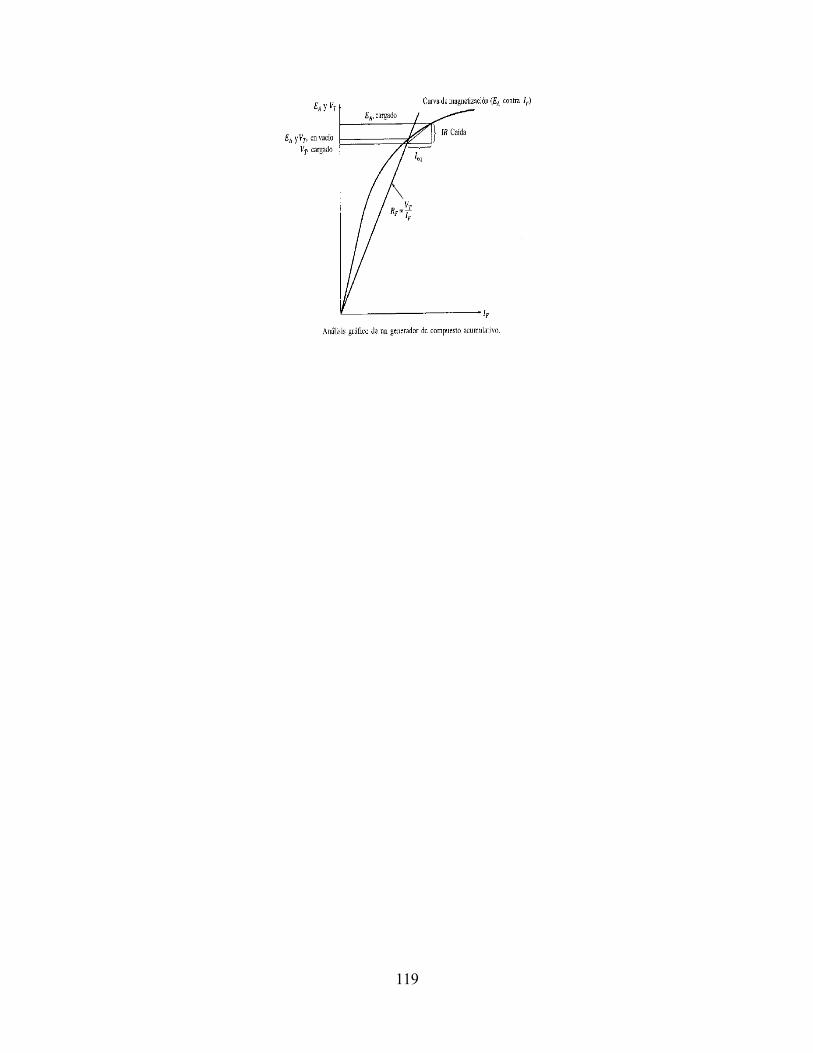
119
Top Related