






Idiomas
Páginas
Jurídico


Nuestro Planeta y los Satélites GPS

El sistema de control : conjunto de estaciones permanentes con coordenadas bien conocidas en un sistema terrestre de referencia internacionalmente aceptado. Su misión es la de rastrear a todos los satélites para calcular las órbitas (efemérides) y controlar sus relojes.
El sistema espacial: constelación de satélites (nominalmente 24 activos). Cada satélite lleva a bordo varios relojes atómicos (5) para asegurar la exactitud de las marcas de tiempo y la estabilidad de la frecuencia de la señal emitida.
Los usuarios: los receptores captan las señales satelitales reciben simultáneamente las componentes de la señal que sirven para medir la distancia receptor-satélite, y el mensaje de navegación ppalmente . constituido por las efemerides que permiten calcular las coordenadas de los satélites.

Los principios del posicionamiento GPS(2)
Ri2 = (Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2
i = 1, 2, 3, ...n
Cada satélite “observado” permite construir una ecuación de esta forma, y todas las ecuaciones de una época determinada constituyen una sistema de ecuaciones con tres incógnitas: las coordenadas del usuario Xu, Yu, Zu.
Efemérides
Observables
Usuario-Receptor

M: mensaje de navegación, contiene ppalmente. las efemérides trasmitidas.
CA: código COARSE ACQUISITION para la medición rápida del Pseudo Range (o pseudo distancia) entre el satélite y el receptor. Todos los receptores miden Pseudo Range.
w1 = pulsación de la frec. L1. Los receptores de simple frecuencia recuperan la fase de la onda Cos (w1.t).
P1: código PRECISO en la señal L1. Solo los receptores más sofisticados acceden al código P. w2 = pulsación de la frec. L2. Solo los receptores de doble frecuencia recuperan la fase de la onda Cos (w2.t).
P2: código PRECISO en la señal L2. Solo los receptores más sofisticados acceden al código P.
L1 = M. C/A. sen (w1.t) + M. P1. cos(w1.t)
L2 = M. P2. sen (w2.t)
La Señal GPS

C/A tiene una Long. de onda de aprox. 300 m.
La precisión: 3 a 0.5 m
P tiene una Long. de onda de aprox. 30 m.
La precisión: 0.3 m
L1: tiene una Longitud de onda de aprox. 20 cm
L2: tiene una Longitud de onda de aprox. 24 cm
La precisión: 2 mm
La Señal GPS – Los Observables

Tiempo GPS
Generado en el Satélite
Recibido en el Receptor
Generado en el Receptor
Principio de la Observación de Distancias con Códigos
= c . Distancia Satélite-Receptor Observada
Satélite
Receptor
: Cantidad Observada
T1 Ti

Proceso de Autocorrelación
El receptor mide electrónicamente lo que debe desplazar la señal para producir la coincidencia

En estas condiciones, las incógnitas del problema son las COORDENADAS del Usuario (X,Y, Z) ó (, , h).
En consecuencia, 3 (TRES) Satélites simultáneos son suficientes
Ri2 = (Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2

Generado en el Receptor
Tiempo GPS
Generado en el Satélite
t
Recibido en el Receptor
Principio de la Observación de Distancias con Códigos
En la Realidad – Error de Reloj
= c . ( + t ) = c. + c. t
Pseudo Range Observada
+ t : Cantidad Observada

En estas condiciones, las incógnitas del problema son la POSICIÓN del Usuario (X,Y, Z) ó (, , h).
En consecuencia, 4 (CUATRO) Satélites simultáneos son suficientes
Ri2 = (Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2

S.A.
IonósferaTropósfera
Relojlocal
Los ppales. errores
Ri2 = (Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2 con i = 1, 2, 3, ...n (1) S.A. (Selective Availability) era una degradación intencional de los relojes y las
efemérides satelitales para usuarios “no calificados”. Desactivada !!
La atmósfera introduce errores en la propagación de la señal de difícil modelización.
El reloj del receptor debería estar sincronizado con el tiempo de los satélites, de lo contrario introduce un error que es común a todas las mediciones de una época determinada y se elimina agregando una nueva incógnita a la ecuación (1).
Ri = ((Xi – Xu)2 + (Yi – Yu)2 + (Zi – Zu)2)½ + c.dt

Factor de Dilución de la Precisión
DOP viene de “Dilución de la Precision”, es decir, que es un factor que multiplicaa la precisión de las mediciones desmejorando la precisión real.
Cuanto mayor es el PDOP más desfavorable es la situación.
Este es un indicador que puede predecirse con una planificación apropiada.
Los obstáculos locales juegan un papel importante !!!
La Geometría de los Satélites visibles desde una estación es muy importante y se mide a través de los parámetros de la dilución de la precisión.
PDOP: para la Posición espacial
HDOP: para las coordenadas horizontales
VDOP: para la componente vertical

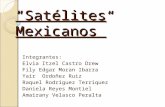
Trayectoria de Satélites GPS en un período de 2 hs para Tegucigalpa
PDOP y Número de Satélites en el mismo período

Las Efemérides GPS (órbitas)
Las efemérides trasmitidas (broadcast), son calculadas por el sistema oficial decontrol de GPS en base al rastreo de todos los satélites, y resultan de la extra-polación de las órbitas ajustadas para que los usuarios puedan disponer delas posiciones de los satélites en tiempo real. La precisión de estas efemérideses de algunos metros.
Las efemérides precisas son calculadas por el Servicio GPS Internacional (IGS) y son accesibles posteriormente y por internet con una demora de variosdías. Estas órbitas tienen una precisión de pocos cm y resultan del AJUSTEde un arco observado y NO de una predicción.
•Las Efemérides Transmitidas en Tiempo Real son EXTRAPOLADAS
•Para trabajos de alta precisión deben utilizarse las Efemérides Precisas

Los efectos atmosféricos(Ionósfera y Tropósfera)
La ionósfera afecta a las señales en forma inversamente proporcional a la frecuencia de las mismas. Esto permite eliminar su efecto combinando las componentes de las señales GPS en las dos frecuencias posibles L1 y L2. Para ello es necesario utilizar receptores de “doble frecuencia”.
La tropósfera (baja atmósfera) introduce errores importantes al producir un retardo en la señal. Se modeliza muy aceptablemente la componente seca y con más incertidumbre la componente húmeda (influencia del vapor de agua en el camino de la onda). Afecta principalmente la determinación de alturas con GPS.
• La atmósfera perturba la propagación de las señales GPS
• Los efectos son diferentes en la Ionósfera (capa superior) y en la Tropósfera (capa inferior)

Posicionamiento Relativo
La atmósfera introduce errores muy similares para distancias de algunas decenas de km. Para distancias mayores es importante utilizar receptores de doble frecuencia para eliminar los errores de la ionósfera.
Es condición necesaria para alcanzar una solución apropiada contar con una buena posición de partida, de lo contrario, la precisión de la posición relativa resultará afectada según una regla aproximada:
Error en la base => 1 PPM cada 10 m de error en las coordenadas de partida
•Los Errores son comunes a ambas estaciones
•La solución Relativa es mucho más precisa que una aislada
•Es necesario disponer de correctas coordenadas de partida (Red Geodésica)
1 ppm significa: 1 cm en 10 Km ó 10 cm en
100 Km

Condiciones para obtener una posición Aislada o Relativa
Posición Aislada
-Un solo receptor
-Disponible en forma instantánea. También puede obtenerse una solución acumulada o promediada.
-La precisión está limitada por los errores de propagación (típicamente 5 m)
Posición Relativa
-Por lo menos 2 receptores Observando Simultáneamente
-Observar aprox. 1 hora, dependiendo del tipo de receptores y las condiciones de geometría.
-Se requiere conocer las coordenadas del punto de partida.
-Precisión centimétrica

Simples Diferencias SD = Fa - Fb
S1
ab
Dobles Diferencias DD = SD2 – SD1
S1
ab
S2
Se eliminan los errores comunes al satélite y a la atmósfera
Se eliminan los errores introducidos por los relojes de los receptores
El único problema de las Fases es que aparecen incógnitas de Ambigüedad

Posicionamiento AisladoReceptor Cant Min Observables Precisión ()
Navegador 1 C/A Hor. 5 m Vert 10 m
Submétrico 1 C/A y L1(-) Hor. 5 m Vert 10 m
Geodésico (L1) 1 C/A y L1 Hor. 5 m Vert 10 m
Geodésico (L1/L2) 1 C/A, P-, L1, L2 Hor. 5 m Vert 10 m
Receptor C.Min Observables Precisión ()
Navegador 2 C/A 2 a 3 m
Submétrico 2 C/A y L1(-) Aprox. 50 cm
Geodésico (L1) 2 C/A y L1 1 cm + 1ppm Hasta 20 Km
Geodésico (L1/L2) 2 C/A, P-, L1, L2 1 cm + 1ppm
Posicionamiento Relativo (estático)
* Diferencias !!!

Punto de la Red Geodésica
Punto de Referencia en la zona de
Trabajo
Método estático (o estático rápido): un receptor permanece fijo en una estación de referencia de coordenadas conocidas y el segundo se instala en el punto que se desea posicionar. La grabación de datos se hace habitualmente cada 15 seg.
Métodos de medición
Método cinemático (stop and go y/o continuo): un receptor permanece fijo en una estación de coordenadas conocidas y el segundo se desplaza deteniéndose brevemente en los puntos a posicionar (Stop & Go). . Los receptores modernos tienen inicialización OTF (On The Fly)
La técnica descripta puede aplicarse para obtener resultados en tiempo real (RTK: Real Time Kinematics) para lo cual es necesario agregar un transmisor en la estación base y un receptor en el equipo móvil.

Las Alturas
Haciendo GPS (h) sobre líneas de nivelación (H) se obtiene N directamente a partir de (1)
h : Altura elipsoidal (geodésica) obtenida con GPS
H : Altura ortométrica (Sobre el Nivel Medio del Mar)
H = h - N
Topografía
Top Related