






Idiomas
Páginas
Jurídico

Departamento de Física, Ingeniería de Sistemas y Teoría de la SeñalGrupo de Automática, Robótica y Visión Artificial
Jorge Pomares BaezaFernando Torres Medina
Grupo de Automática, Robótica y Visión Artificial
Seguimiento de Trayectorias empleando Control Visual 2D
basado en Flujo de Movimiento
2Automática, Robótica y Visión Artificial
Indice
Trabajos anteriores.Problema a resolver.Control Visual Basado en Imagen.Seguimiento de trayectorias empleando control visual.Control visual 2D basado en flujo de movimiento.
! Generación del flujo de movimiento.! Control visual 2D basado en flujo de movimiento.! Resultados.
Fusión Control Visual-Fuerza.
3Automática, Robótica y Visión Artificial
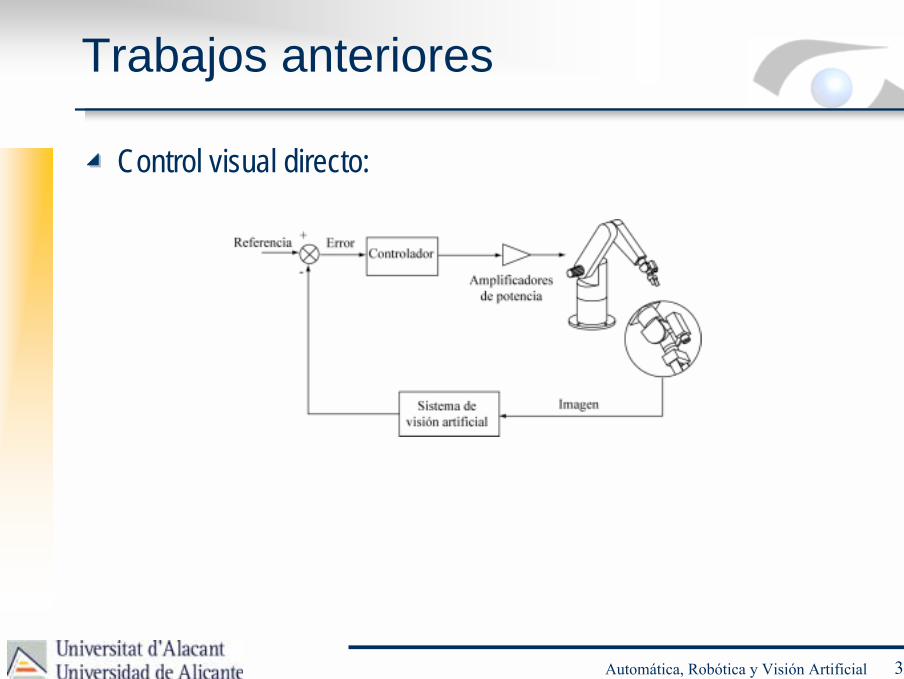
Trabajos anteriores
Control visual directo:
4Automática, Robótica y Visión Artificial
Trabajos anteriores
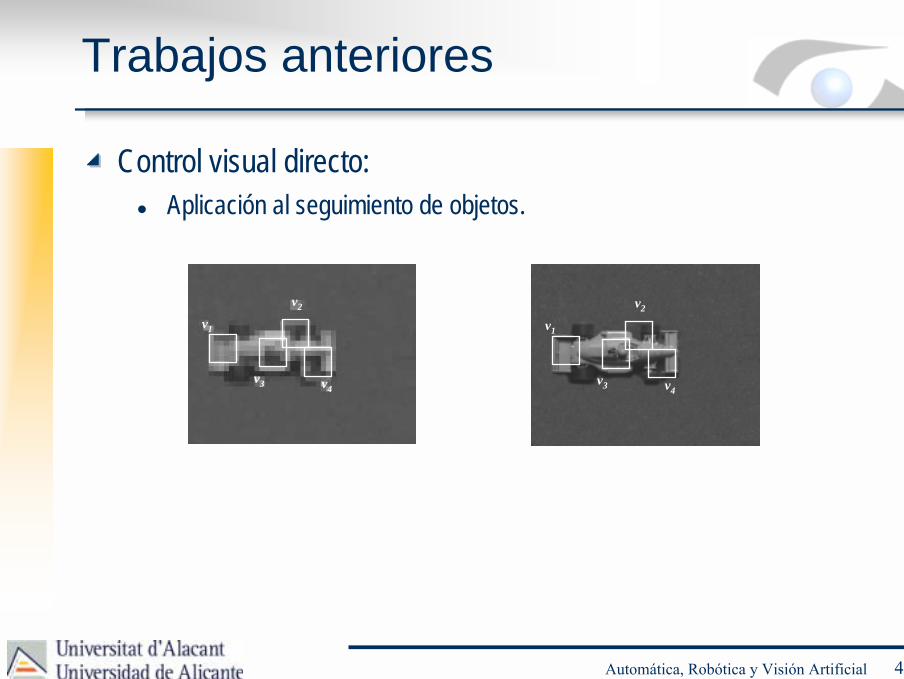
Control visual directo:
v1
v2
v3 v4
v1
v2
v3 v4
! Aplicación al seguimiento de objetos.
5Automática, Robótica y Visión Artificial
Trabajos anteriores
Control visual directo.
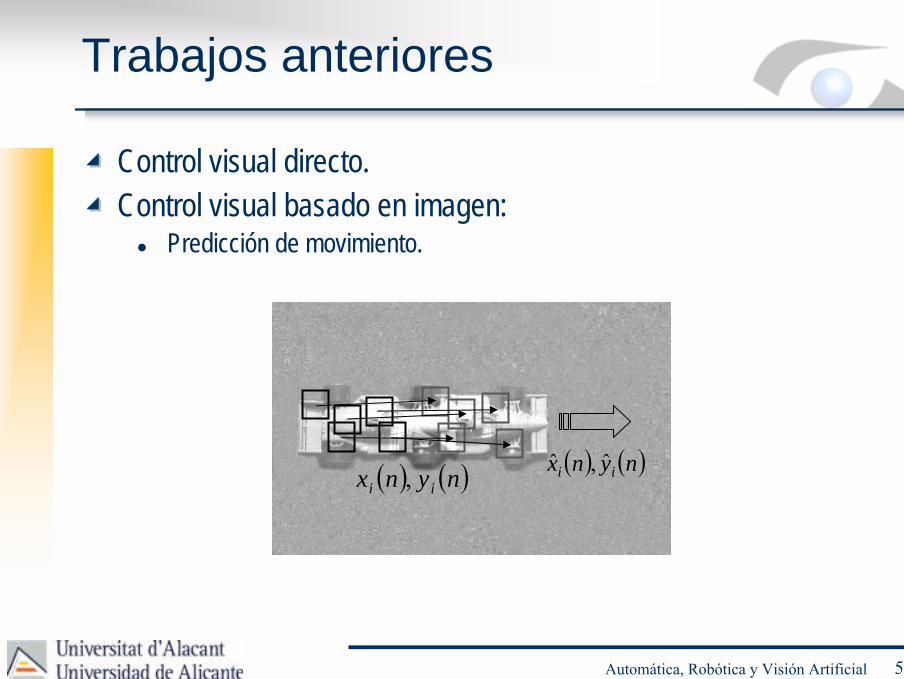
( ) ( )nynx ii , ( ) ( )nynx ii �,�
Control visual basado en imagen:! Predicción de movimiento.
6Automática, Robótica y Visión Artificial
Trabajos anteriores
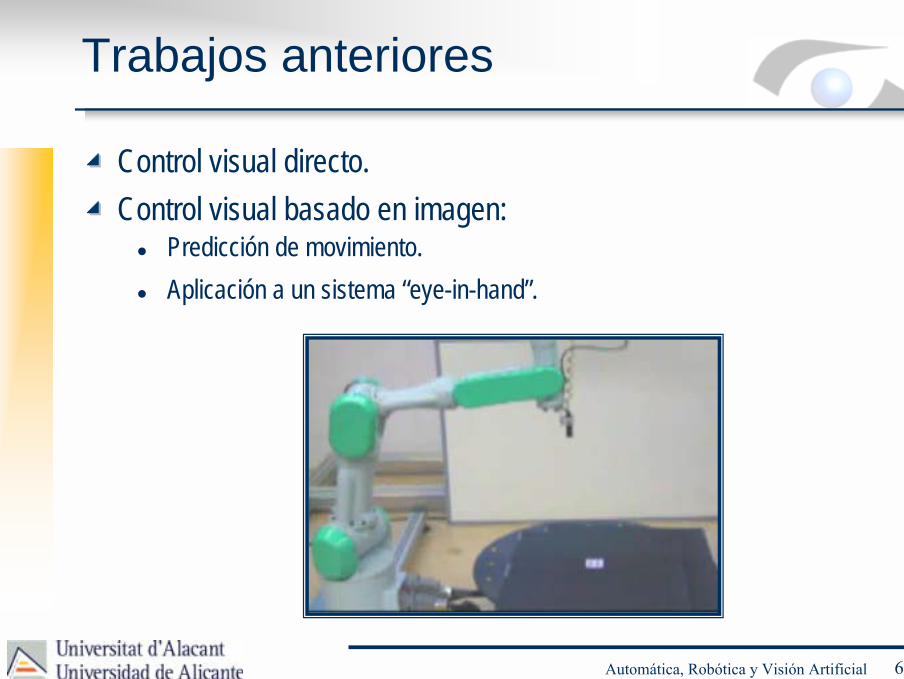
Control visual directo.Control visual basado en imagen:
! Predicción de movimiento.! Aplicación a un sistema “eye-in-hand”.
7Automática, Robótica y Visión Artificial
Problema a resolver
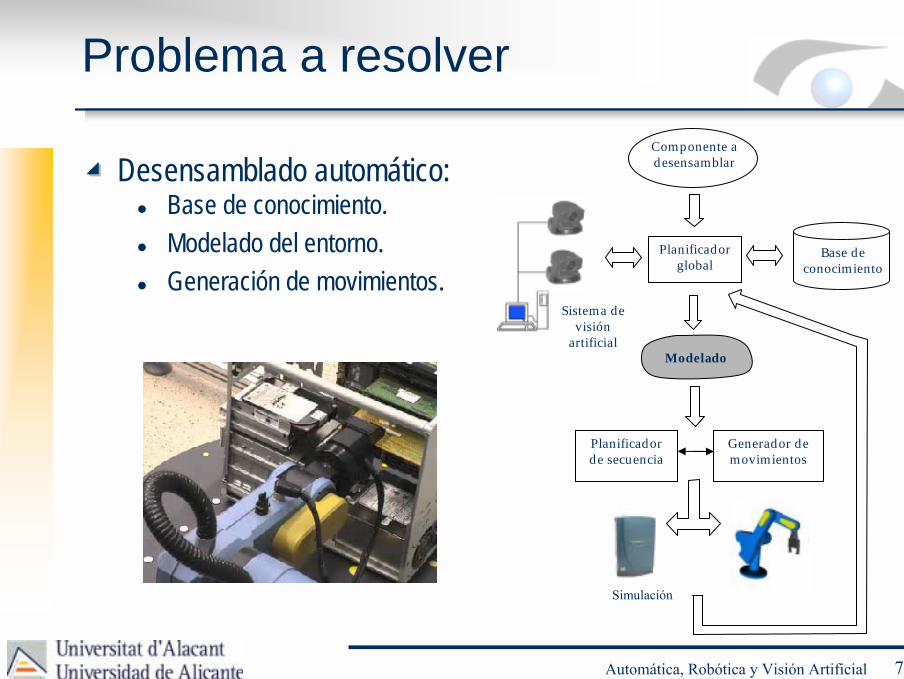
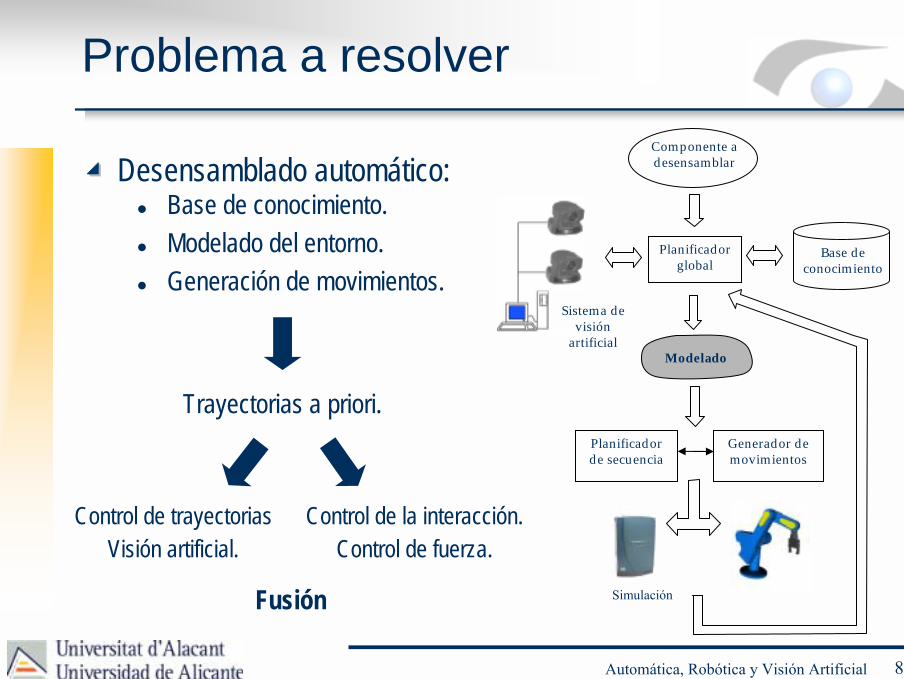
Desensamblado automático:! Base de conocimiento.! Modelado del entorno.! Generación de movimientos.
Modelado
Planificador de secuencia
Generador de movimientos
Base de conocimiento
Simulación
Planificador global
Componente a desensamblar
Sistema de visión
artificial
8Automática, Robótica y Visión Artificial
Problema a resolver
Desensamblado automático:! Base de conocimiento.! Modelado del entorno.! Generación de movimientos.
Modelado
Planificador de secuencia
Generador de movimientos
Base de conocimiento
Simulación
Planificador global
Componente a desensamblar
Sistema de visión
artificial
Trayectorias a priori.
Control de trayectoriasVisión artificial.
Control de la interacción.Control de fuerza.
Fusión
9Automática, Robótica y Visión Artificial
Control visual basado en imagen
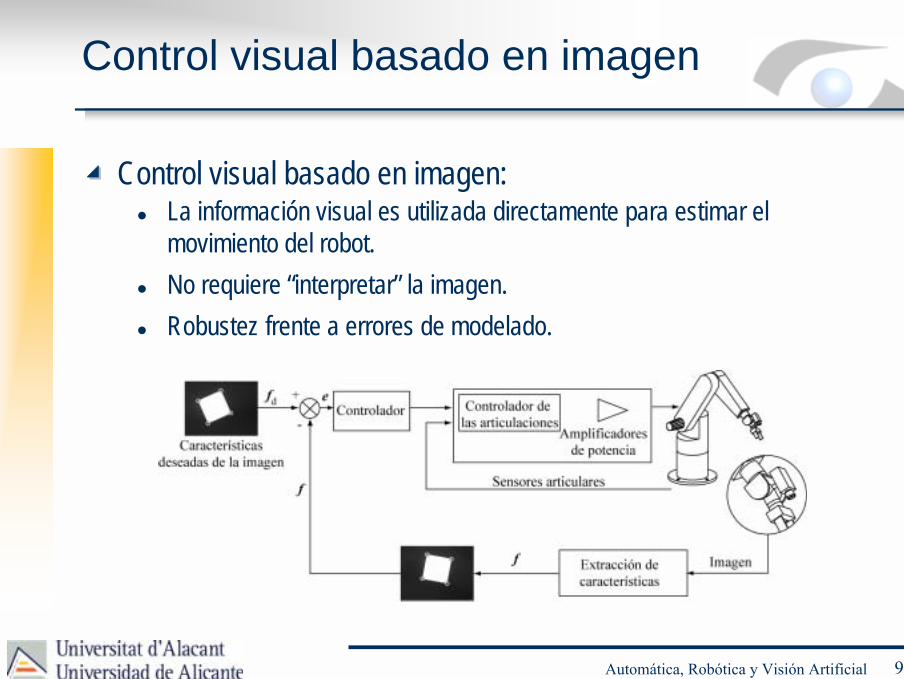
Control visual basado en imagen:! La información visual es utilizada directamente para estimar el
movimiento del robot. ! No requiere “interpretar” la imagen.! Robustez frente a errores de modelado.
10Automática, Robótica y Visión Artificial
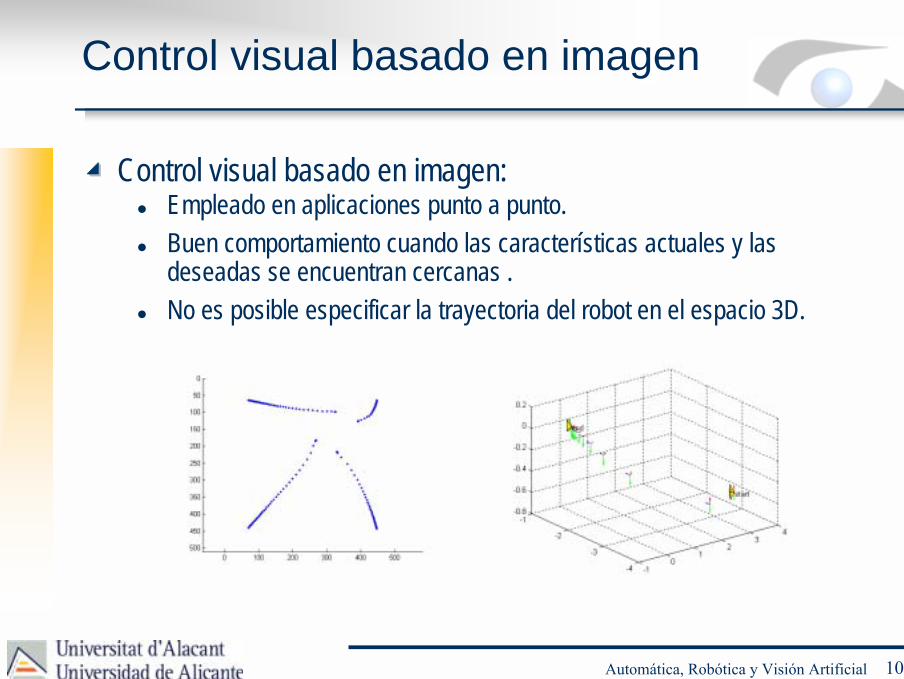
Control visual basado en imagen:! Empleado en aplicaciones punto a punto.! Buen comportamiento cuando las características actuales y las
deseadas se encuentran cercanas .! No es posible especificar la trayectoria del robot en el espacio 3D.
Control visual basado en imagen
11Automática, Robótica y Visión Artificial
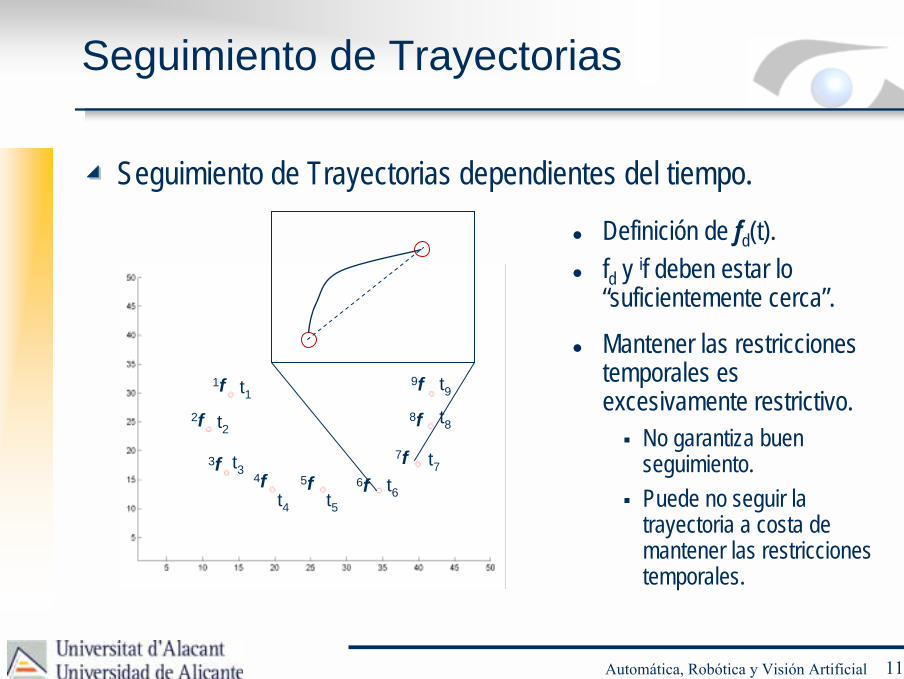
Seguimiento de Trayectorias dependientes del tiempo.
Seguimiento de Trayectorias
1f2f
3f4f 5f 6f
7f
8f
9ft1t2
t3
t4 t5t6
t7
t8
t9
! Definición de fd(t).! fd y if deben estar lo
“suficientemente cerca”.! Mantener las restricciones
temporales es excesivamente restrictivo.
" No garantiza buen seguimiento.
" Puede no seguir la trayectoria a costa de mantener las restricciones temporales.
12Automática, Robótica y Visión Artificial
Propiedades:! La tarea se especifica en el espacio de configuraciones de la imagen.! Codificación independiente del tiempo.! Permite controlar la trayectoria durante la tarea.! Precisión y velocidad de seguimiento ajustable.! Aprovecha el buen comportamiento de los c.v. 2D cuando las
características deseadas se encuentran cercanas.! Extensión a trayectorias respecto a objetos en movimiento.
C.V. 2D basado Flujo Movimiento
13Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
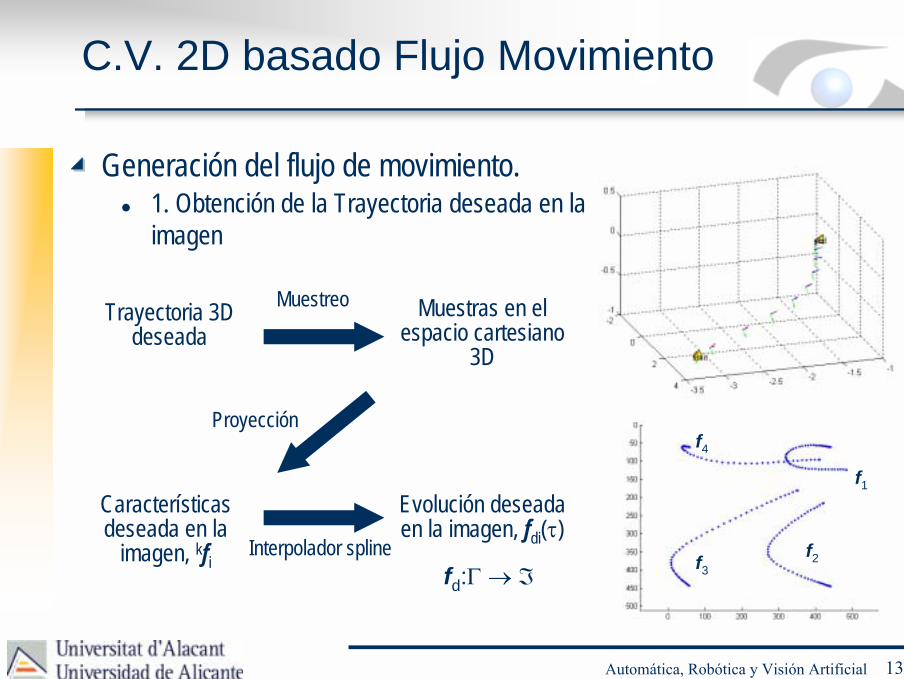
Generación del flujo de movimiento.! 1. Obtención de la Trayectoria deseada en la
imagen
Trayectoria 3D deseada
Muestras en el espacio cartesiano
3D
Características deseada en la
imagen, kfi
f1
f2f3
f4
Muestreo
Interpolador spline
Proyección
Evolución deseada en la imagen, fdi(τ)
fd:Γ → ℑ
14Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
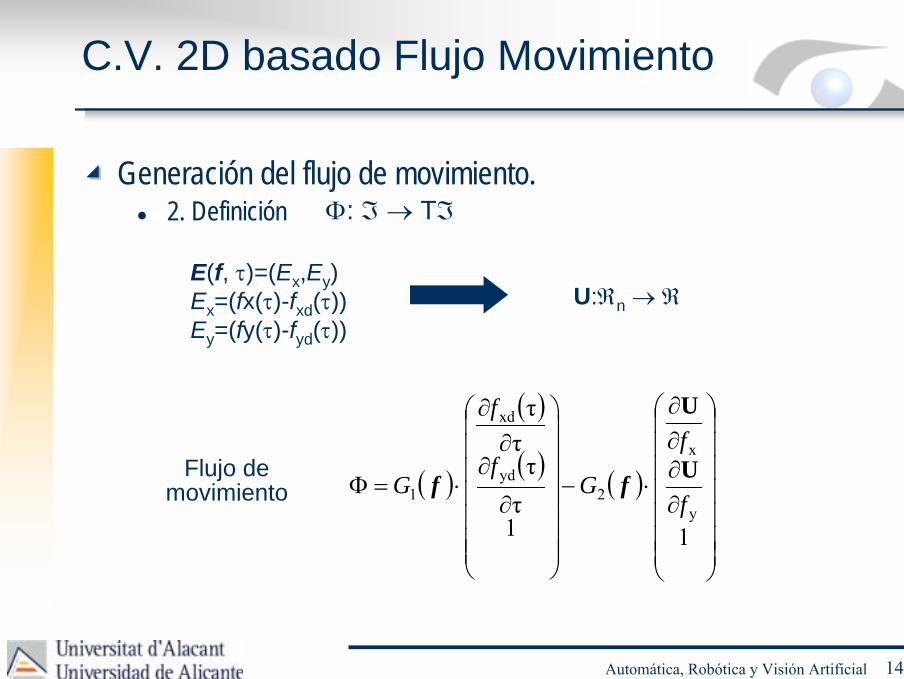
Generación del flujo de movimiento.! 2. Definición Φ: ℑ → Tℑ
E(f, τ)=(Ex,Ey) Ex=(fx(τ)-fxd(τ))Ey=(fy(τ)-fyd(τ))
U:ℜn → ℜ
( )
( )
( ) ( )
∂∂∂∂
⋅−
∂
∂∂
∂
⋅=Φ
11ττττ
y
x
2yd
xd
1 f
f
Gf
f
G U
U
ffFlujo de
movimiento
15Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
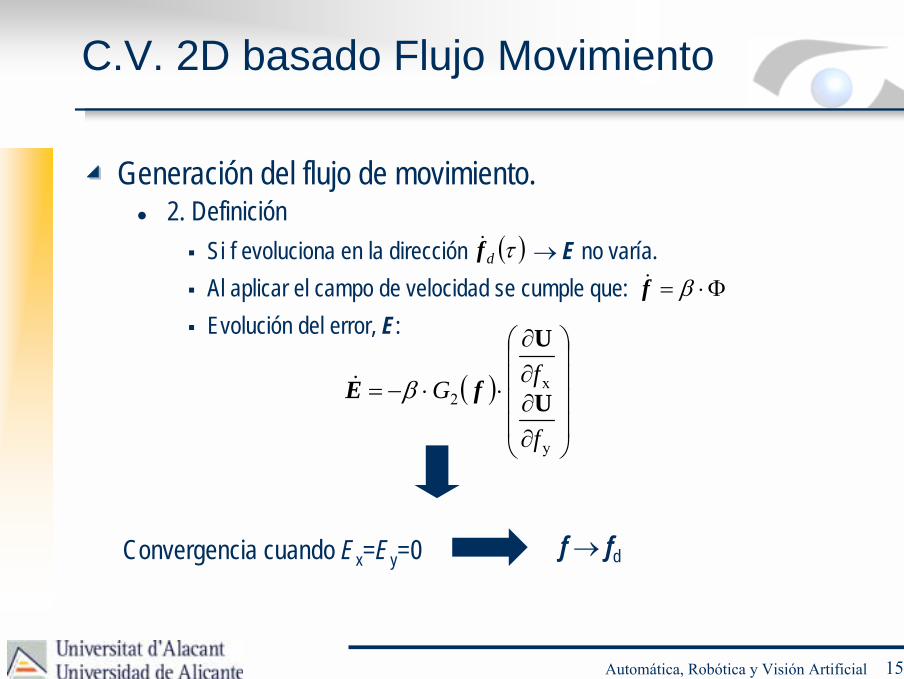
Generación del flujo de movimiento.! 2. Definición
" Si f evoluciona en la dirección → E no varía." Al aplicar el campo de velocidad se cumple que:" Evolución del error, E:
( )τdf&
Φ⋅= βf&
( )
∂∂∂∂
⋅⋅−=
y
x2
f
fG U
U
fE β&
Convergencia cuando Ex=Ey=0 f → fd
16Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
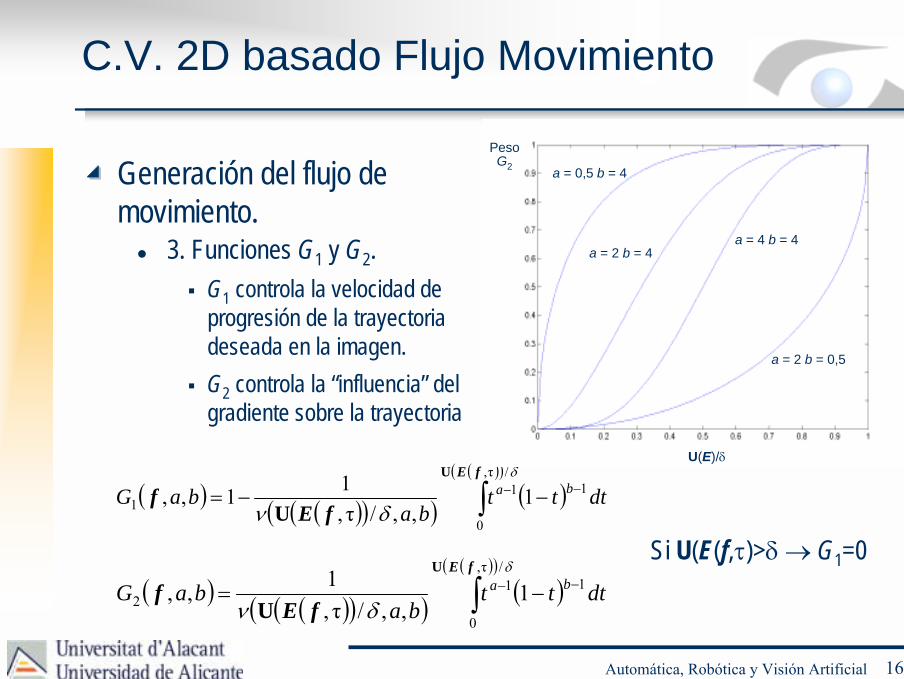
Generación del flujo de movimiento.
! 3. Funciones G1 y G2." G1 controla la velocidad de
progresión de la trayectoria deseada en la imagen.
" G2 controla la “influencia” del gradiente sobre la trayectoria
( ) ( )( )( ) ( )( )( )
∫ −− −−=δ
δν
/τ,
0
111 1
,,/τ,11,,
fE
fEf
U
Udttt
babaG ba
( ) ( )( )( ) ( )( )( )
∫ −− −=δ
δν
/τ,
0
112 1
,,/τ,1,,
fE
fEf
U
Udttt
babaG ba
( )
( )
( ) ( )
∂∂∂∂
⋅−
∂
∂∂
∂
⋅=Φ
11ττττ
y
x
2yd
xd
1 E
E
Gf
f
G U
U
ff
Si U(E(f,τ)>δ → G1=0
a = 0,5 b = 4
a = 2 b = 4a = 4 b = 4
a = 2 b = 0,5
PesoG2
U(E)/δ
17Automática, Robótica y Visión Artificial
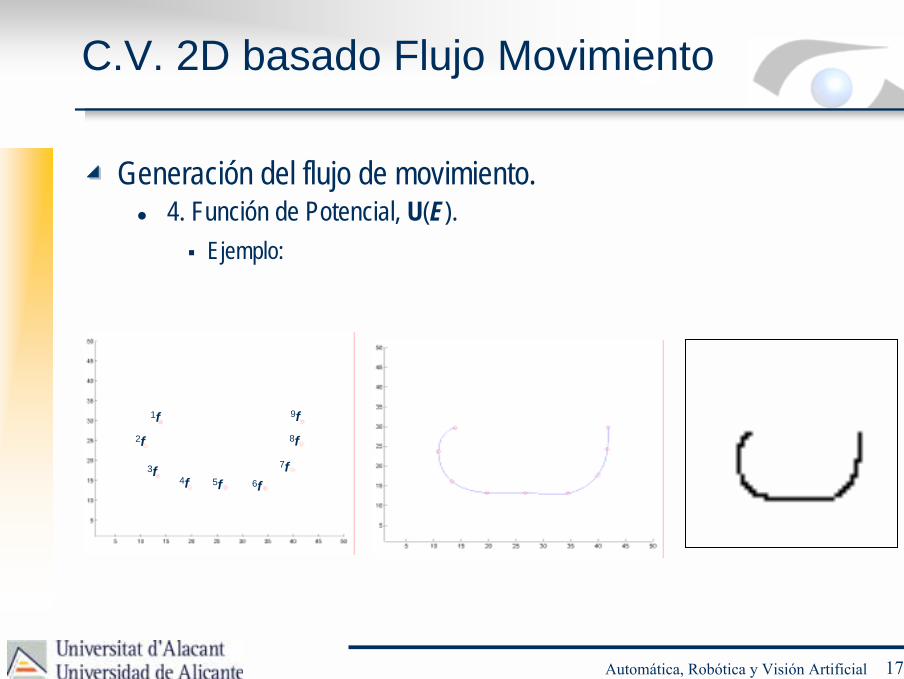
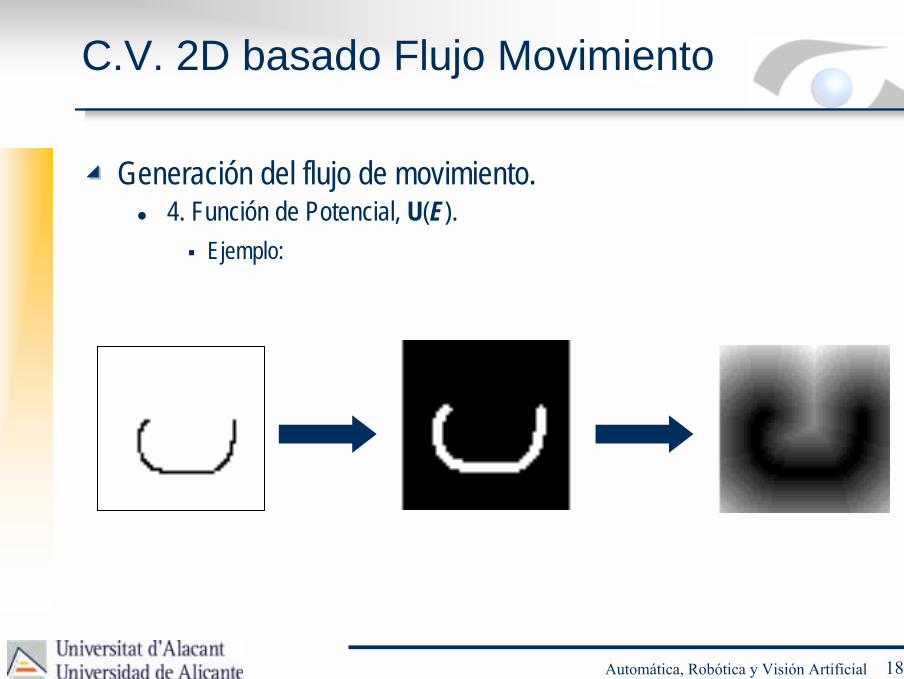
C.V. 2D basado Flujo Movimiento
Generación del flujo de movimiento.! 4. Función de Potencial, U(E).
" Ejemplo:
1f2f
3f4f 5f 6f
7f
8f
9f
18Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
Generación del flujo de movimiento.! 4. Función de Potencial, U(E).
" Ejemplo:
19Automática, Robótica y Visión Artificial
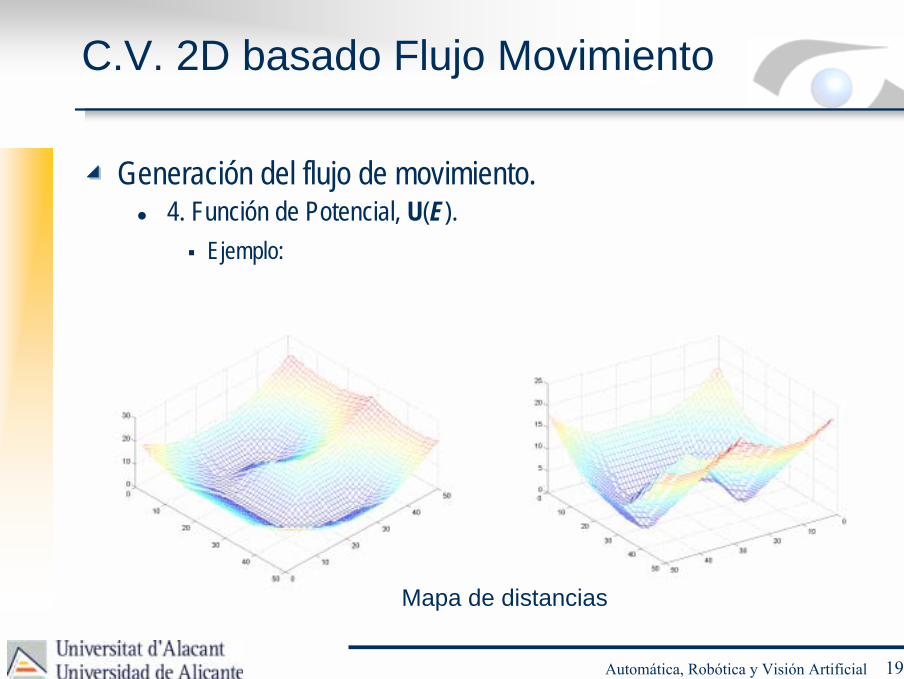
C.V. 2D basado Flujo Movimiento
Generación del flujo de movimiento.! 4. Función de Potencial, U(E).
" Ejemplo:
Mapa de distancias
20Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
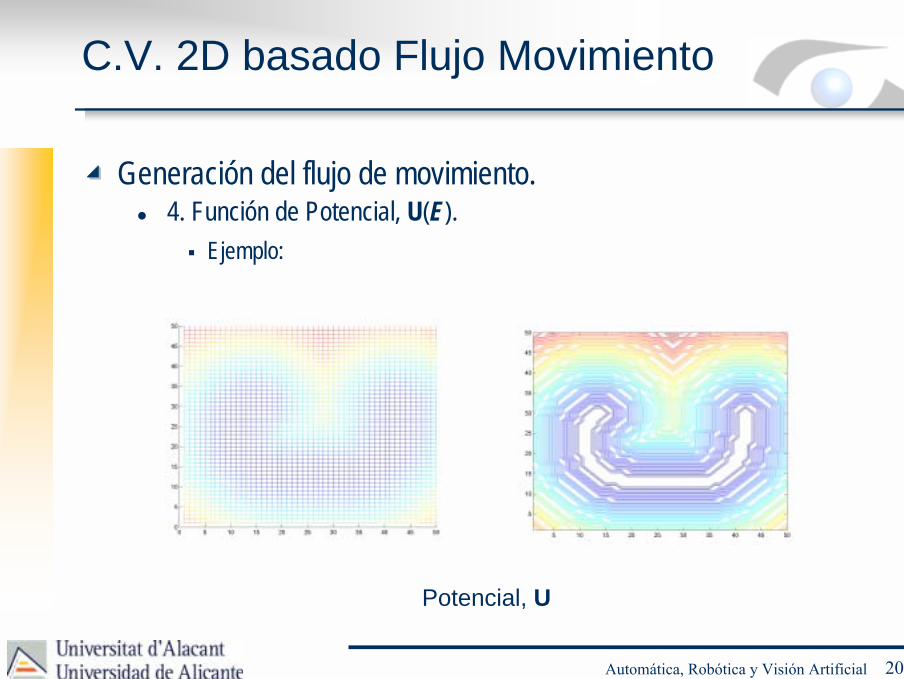
Generación del flujo de movimiento.! 4. Función de Potencial, U(E).
" Ejemplo:
Potencial, U
21Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
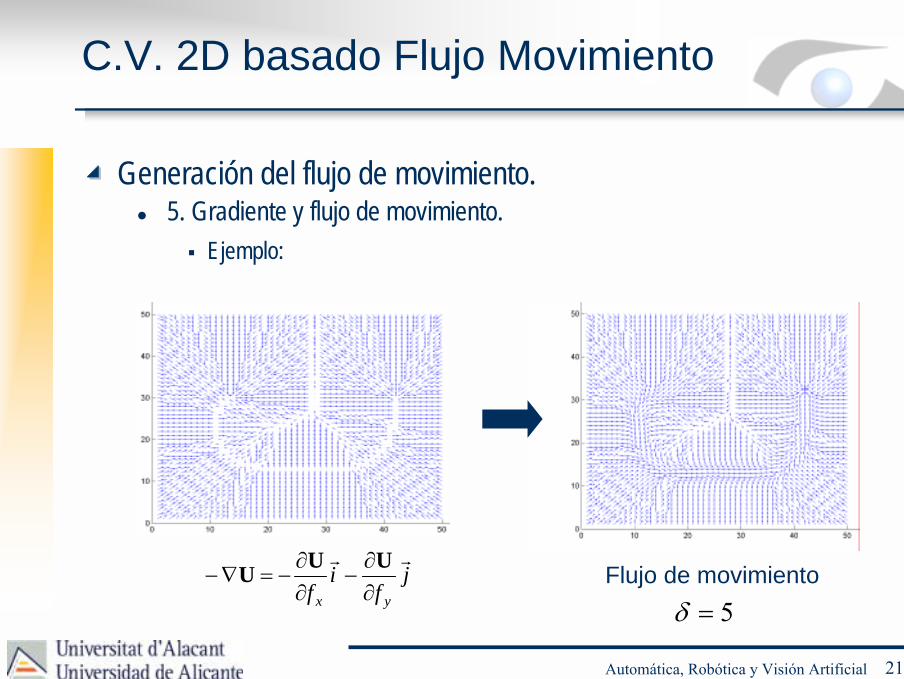
Generación del flujo de movimiento.! 5. Gradiente y flujo de movimiento.
" Ejemplo:
jf
if yx
rr
∂∂
−∂∂
−=∇−UUU Flujo de movimiento
5=δ
22Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
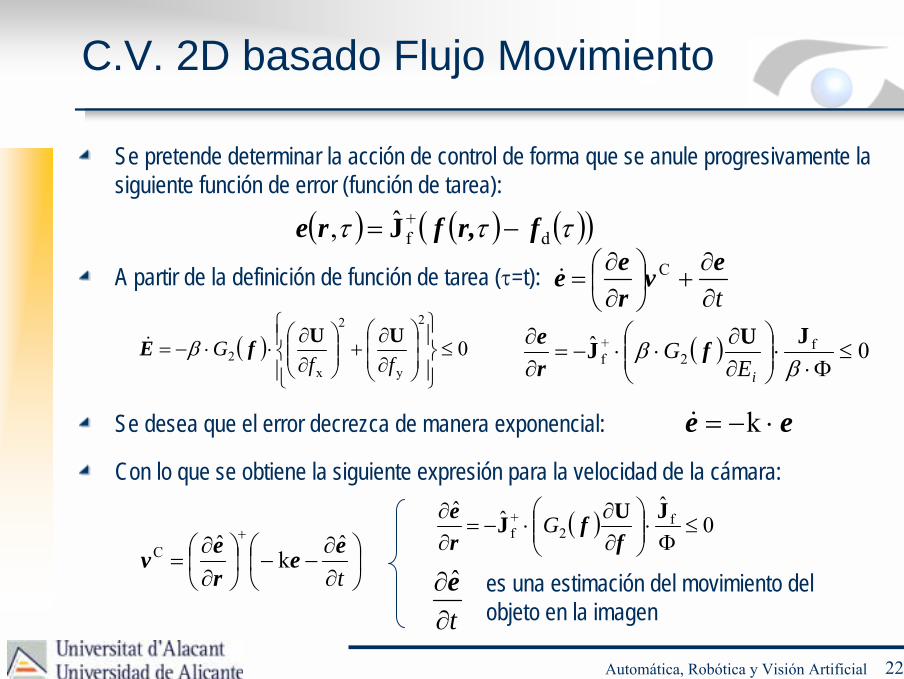
Se pretende determinar la acción de control de forma que se anule progresivamente la siguiente función de error (función de tarea):
( ) ( ) ( )( )τττ d+f
�, fr,fre −= J
t∂∂
+
∂∂
=ev
ree C&A partir de la definición de función de tarea (τ=t):
ee ⋅−= k&Se desea que el error decrezca de manera exponencial:
Con lo que se obtiene la siguiente expresión para la velocidad de la cámara:
∂∂
−−
∂∂
=+
tee
rev
�k
�C
es una estimación del movimiento del objeto en la imagent∂
∂e�
( ) 0� f2
+f ≤
Φ⋅⋅
∂∂
⋅⋅−=∂∂
ββ
JUJiE
G fre( ) 0
2
y
2
x2 ≤
∂∂
+
∂∂
⋅⋅−=ff
G UUfE β&
( ) 0��� f
2+f ≤
Φ⋅
∂∂
⋅−=∂∂ JUJ
ff
re G
23Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
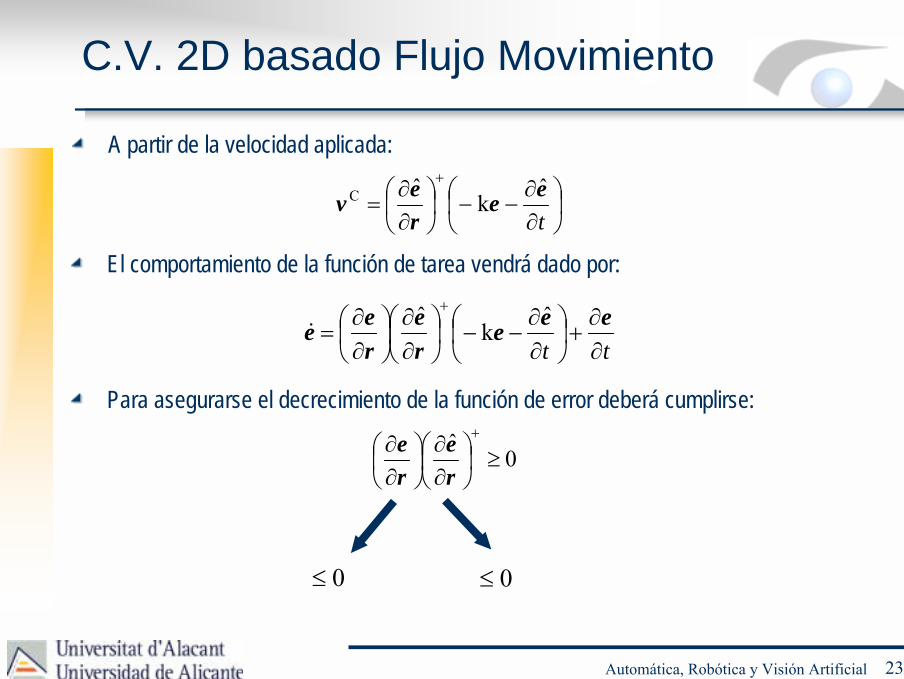
A partir de la velocidad aplicada:
∂∂
−−
∂∂
=+
tee
rev
�k
�C
tt ∂∂
+
∂∂
−−
∂∂
∂∂
=+ eee
re
ree
�k
�&
0�
≥
∂∂
∂∂ +
re
re
El comportamiento de la función de tarea vendrá dado por:
Para asegurarse el decrecimiento de la función de error deberá cumplirse:
0≤ 0≤
24Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
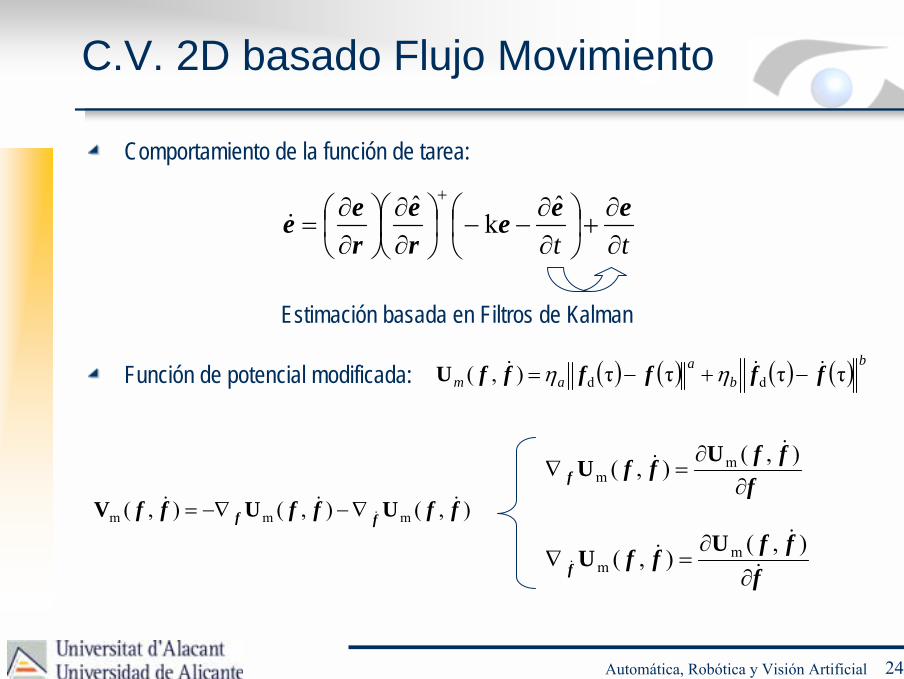
Comportamiento de la función de tarea:
tt ∂∂
+
∂∂
−−
∂∂
∂∂
=+ eee
re
ree
�k
�&
Estimación basada en Filtros de Kalman
( ) ( ) ( ) ( ) bb
aam ττττ),( dd ffffff &&& −+−= ηηUFunción de potencial modificada:
),(),(),( mmm ffffff ff&&&
& UUV ∇−−∇=f
fffff ∂∂
=∇),(),( m
m
&& UU
ffffff &
&&
&∂
∂=∇
),(),( mm
UU
25Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
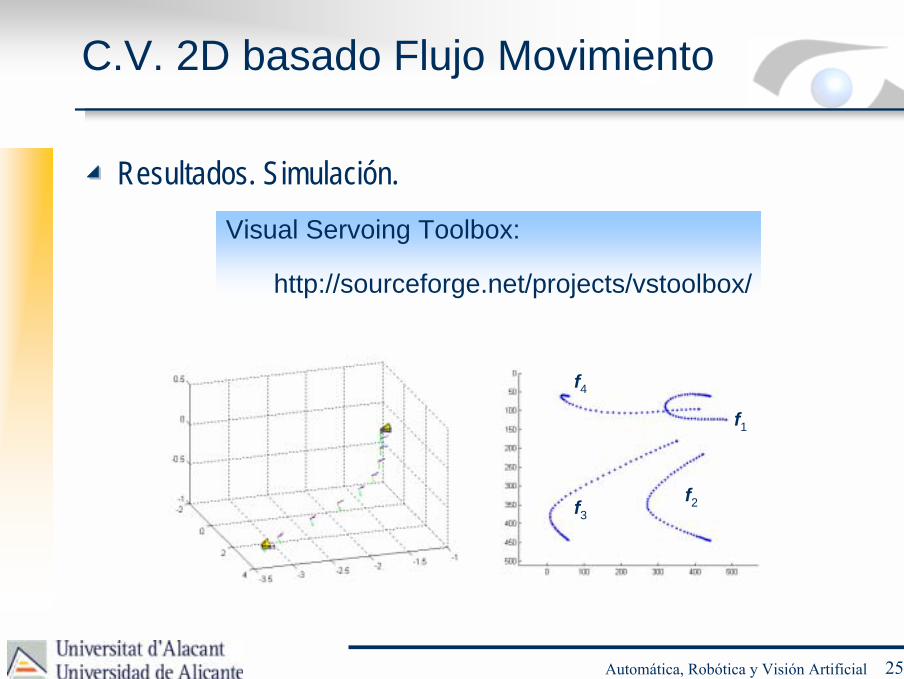
Resultados. Simulación.
f1
f2f3
f4
Visual Servoing Toolbox:
http://sourceforge.net/projects/vstoolbox/
26Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
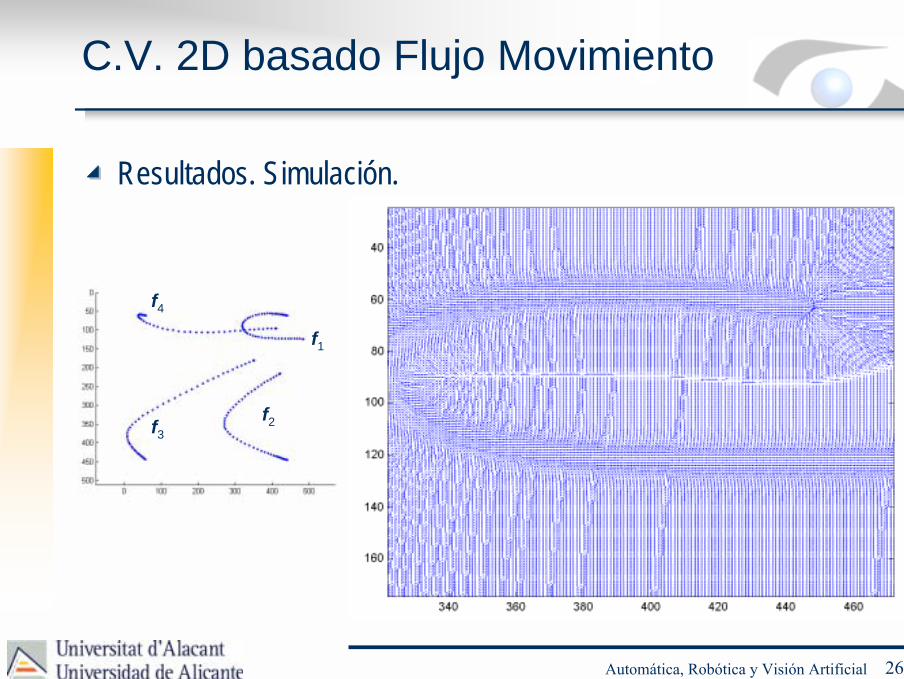
Resultados. Simulación.
f1
f2f3
f4
27Automática, Robótica y Visión Artificial
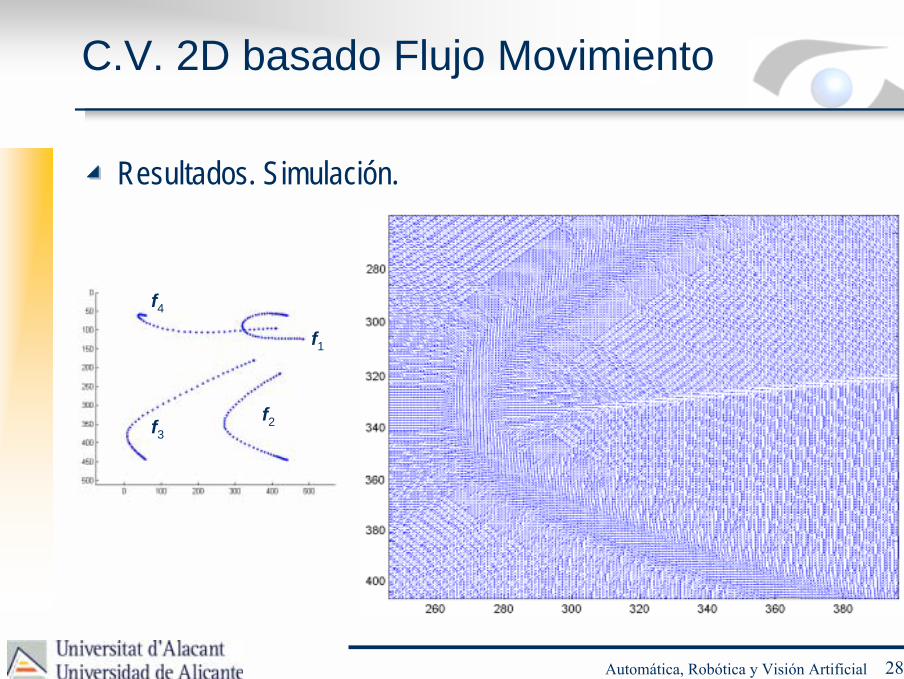
C.V. 2D basado Flujo Movimiento
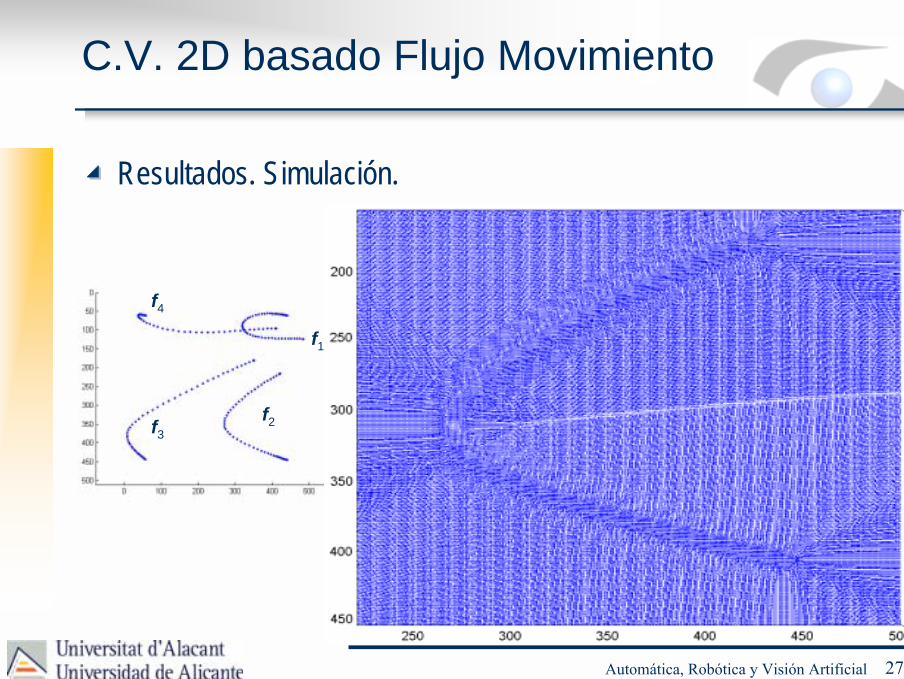
Resultados. Simulación.
f1
f2f3
f4
28Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
29Automática, Robótica y Visión Artificial
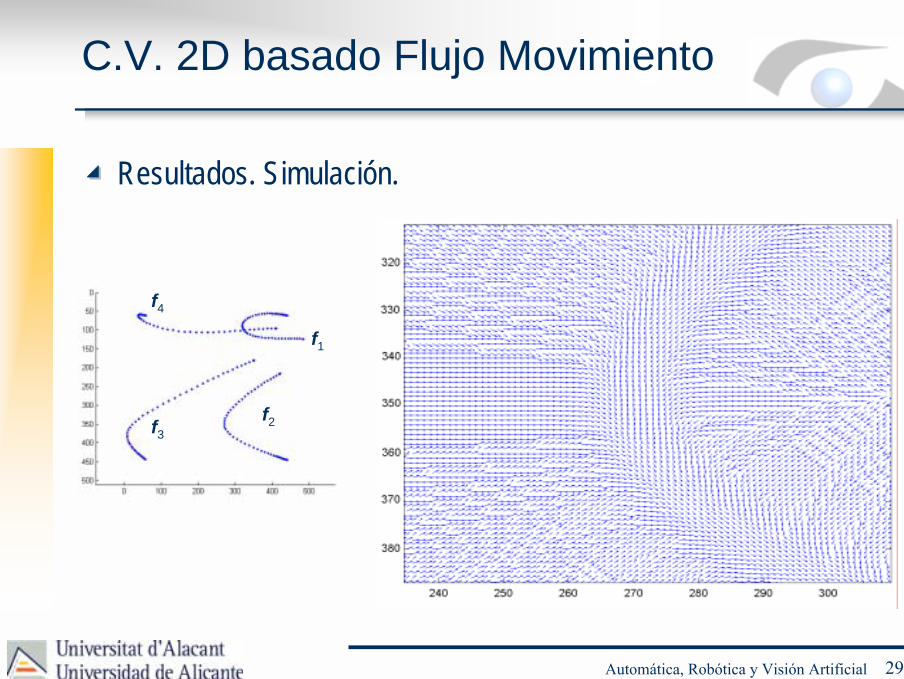
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
30Automática, Robótica y Visión Artificial
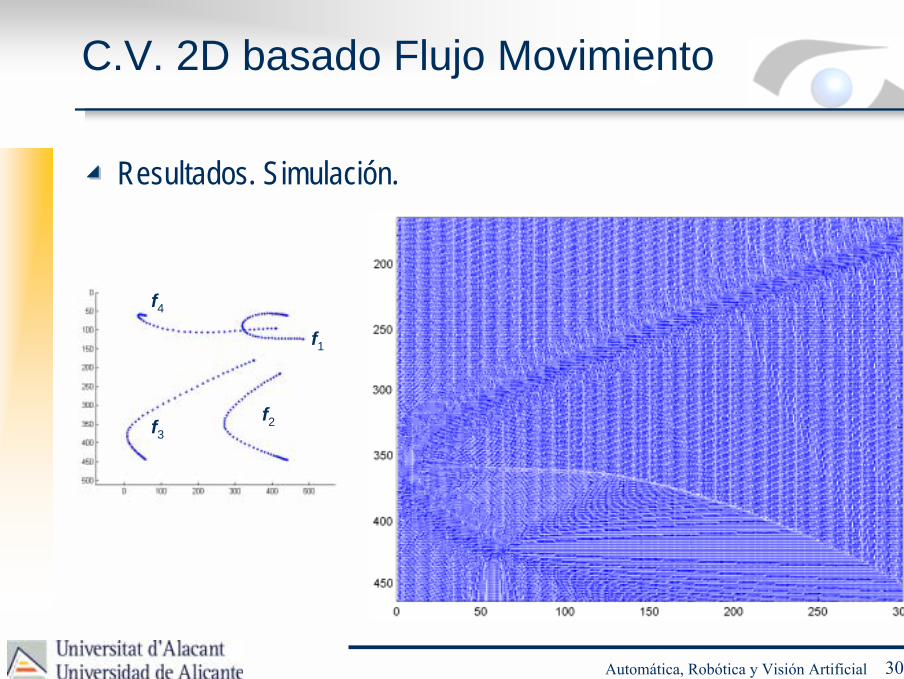
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
31Automática, Robótica y Visión Artificial
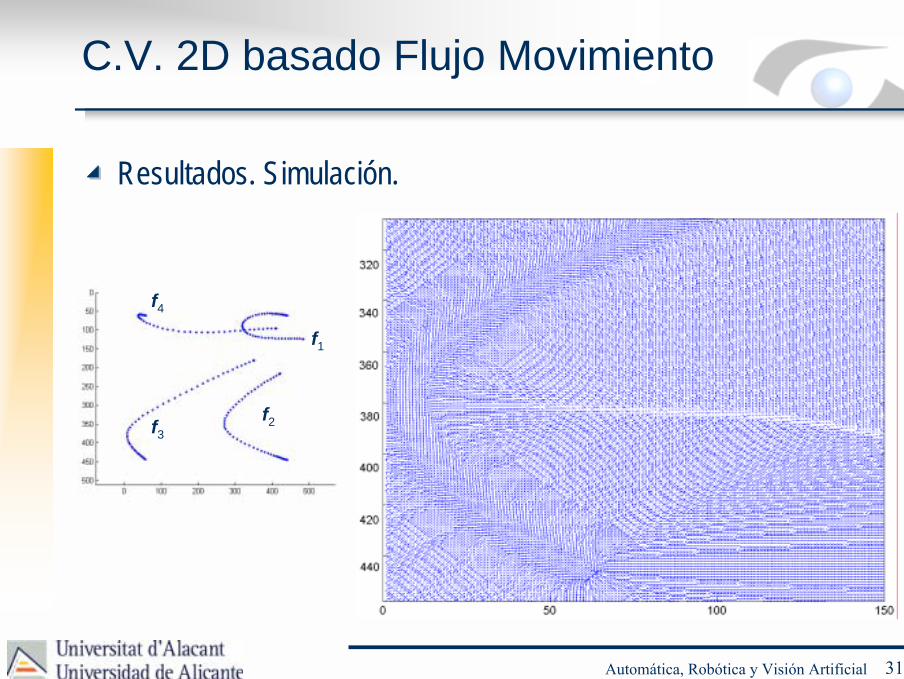
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
32Automática, Robótica y Visión Artificial
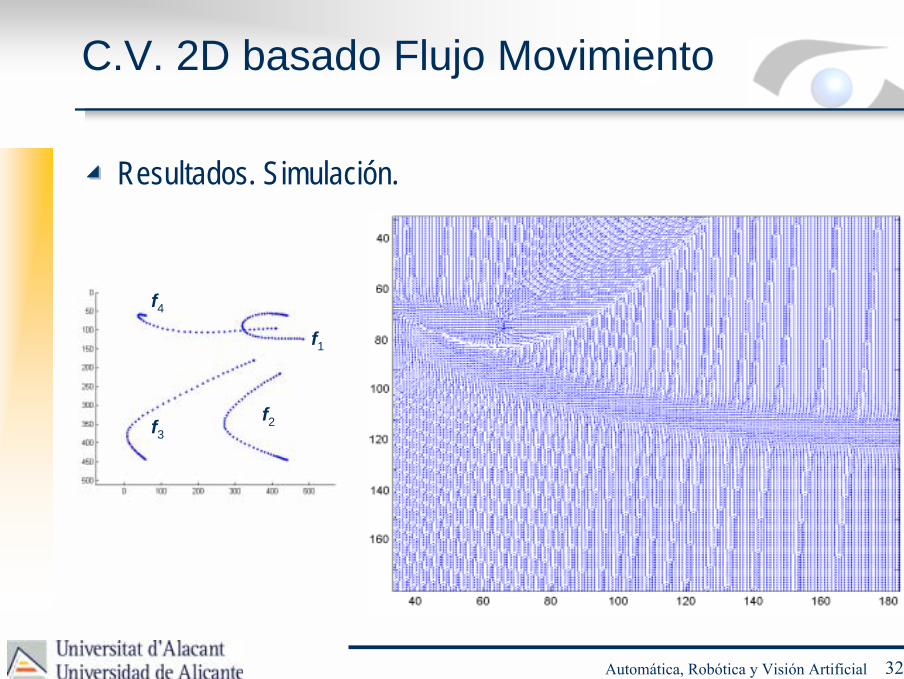
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
33Automática, Robótica y Visión Artificial
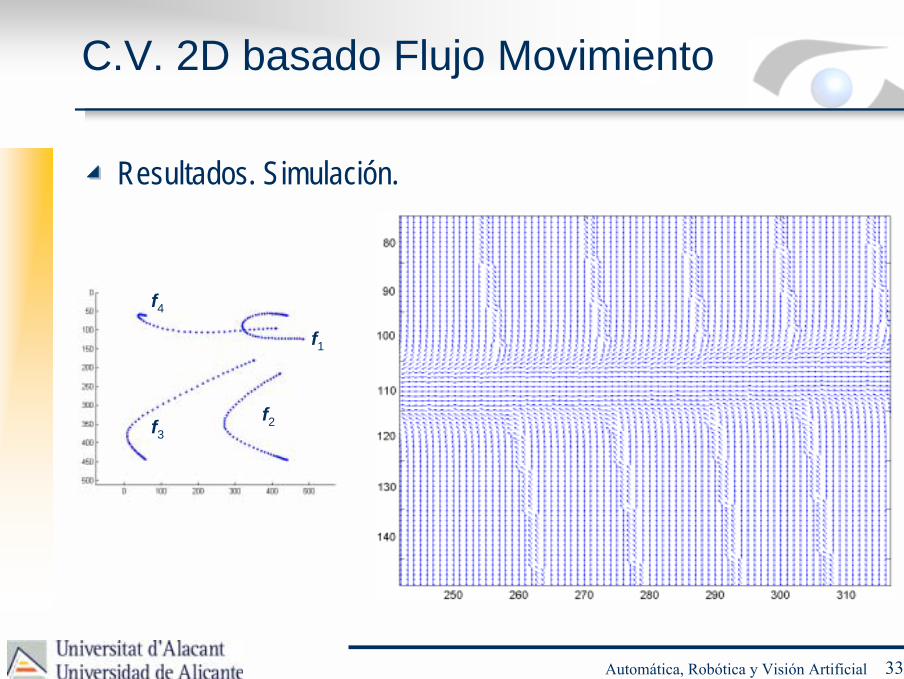
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
34Automática, Robótica y Visión Artificial
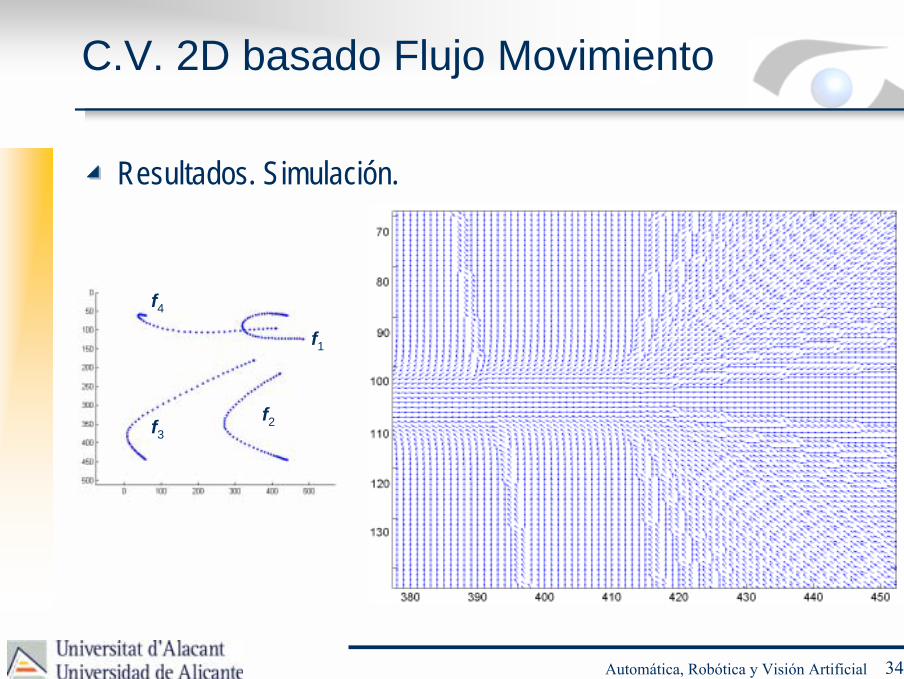
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
f1
f2f3
f4
35Automática, Robótica y Visión Artificial
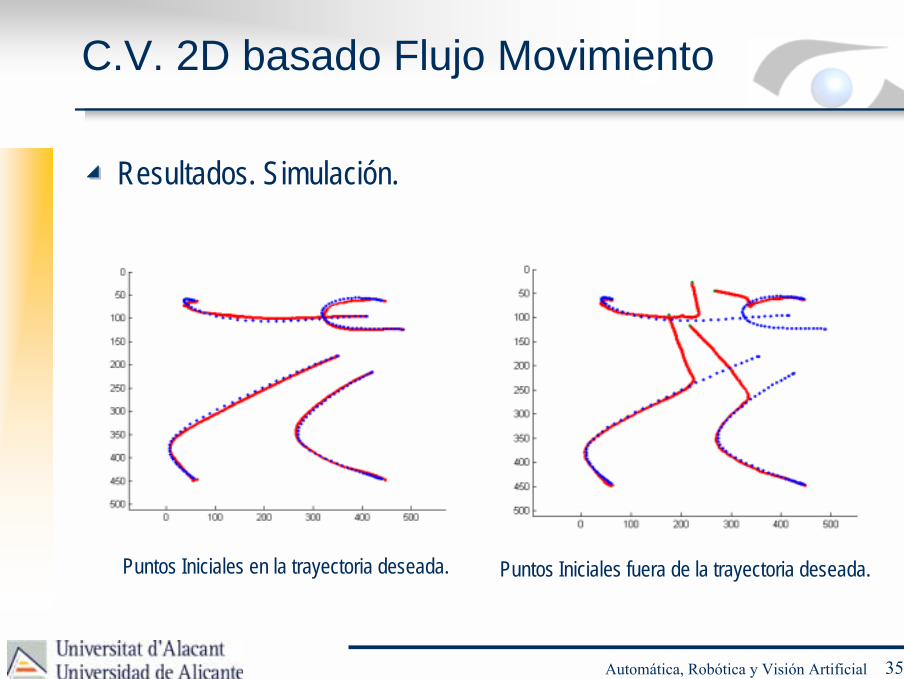
C.V. 2D basado Flujo Movimiento
Resultados. Simulación.
Puntos Iniciales en la trayectoria deseada. Puntos Iniciales fuera de la trayectoria deseada.
36Automática, Robótica y Visión Artificial
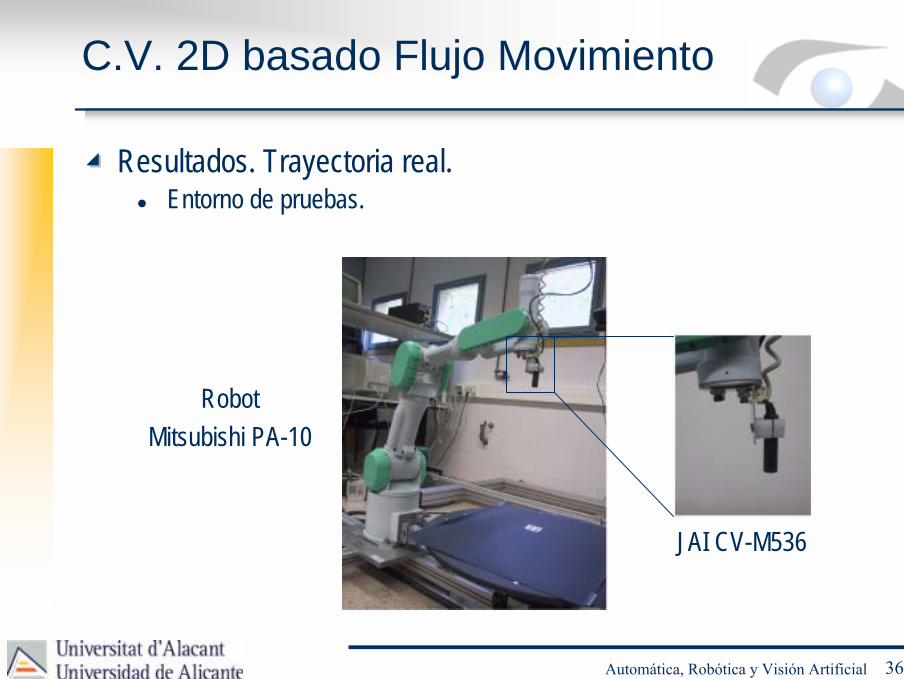
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Entorno de pruebas.
RobotMitsubishi PA-10
JAI CV-M536
37Automática, Robótica y Visión Artificial
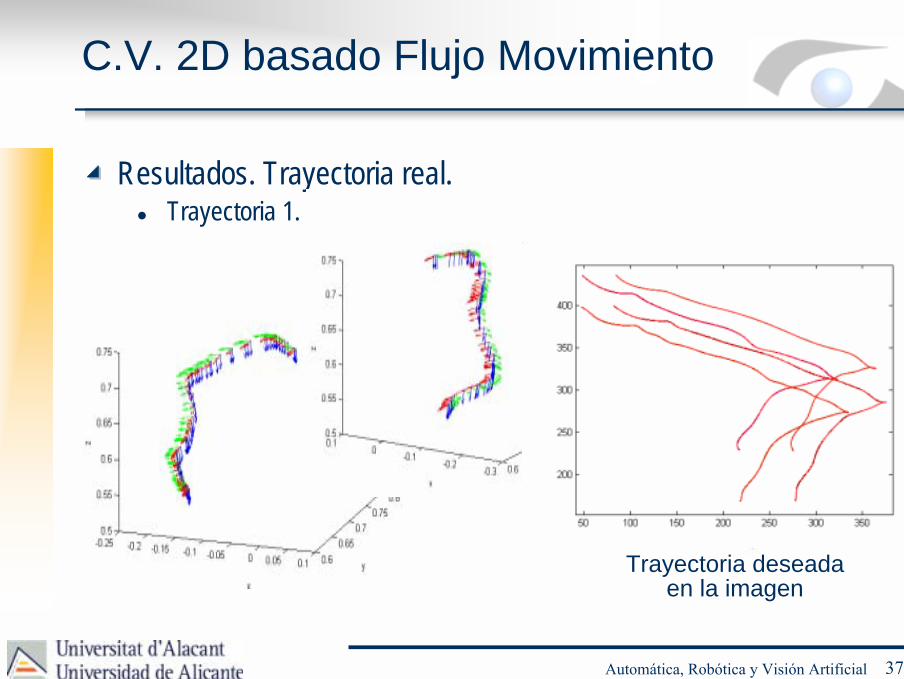
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 1.
Trayectoria deseada en la imagen
38Automática, Robótica y Visión Artificial
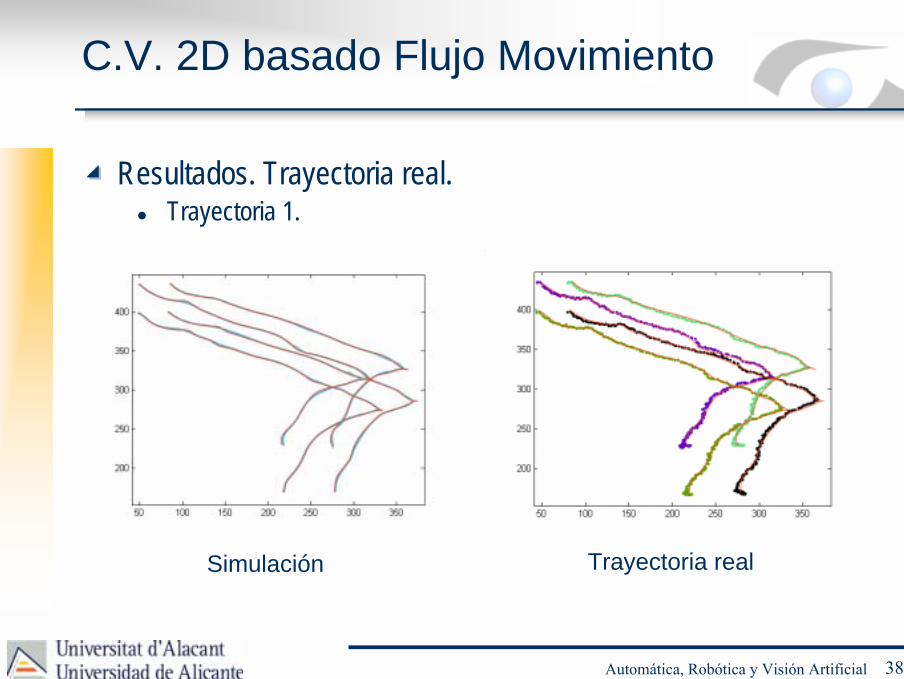
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 1.
Simulación Trayectoria real
39Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 1.
40Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 1. (a=2, b=0,5).
41Automática, Robótica y Visión Artificial
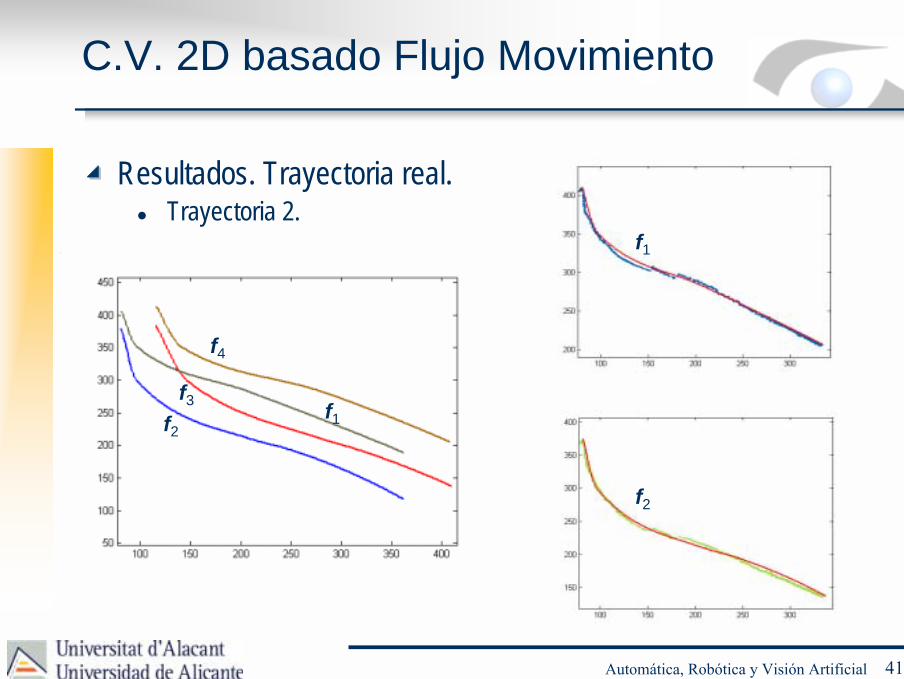
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 2.
f1f2
f3
f4
f1
f2
42Automática, Robótica y Visión Artificial
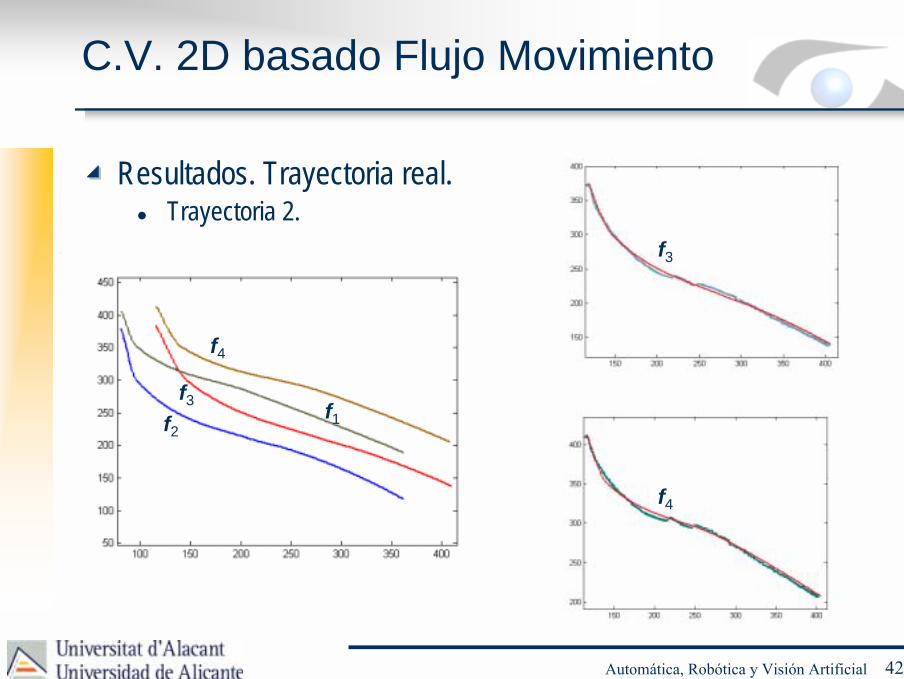
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 2.
f1f2
f3
f4
f3
f4
43Automática, Robótica y Visión Artificial
C.V. 2D basado Flujo Movimiento
Resultados. Trayectoria real.! Trayectoria 2.
44Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
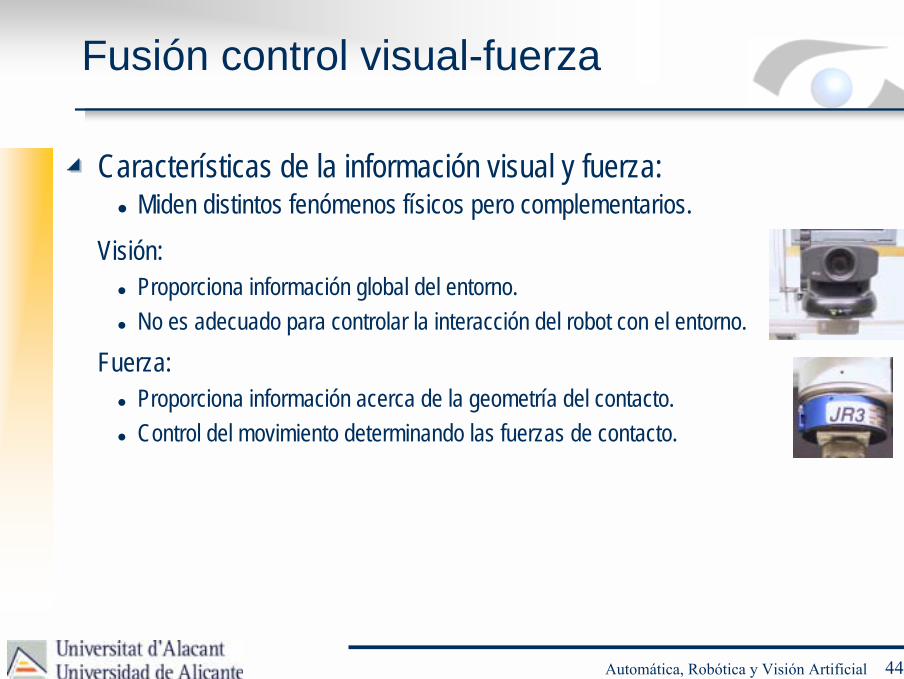
Características de la información visual y fuerza:! Miden distintos fenómenos físicos pero complementarios.
Fuerza:! Proporciona información acerca de la geometría del contacto.! Control del movimiento determinando las fuerzas de contacto.
Visión:! Proporciona información global del entorno.! No es adecuado para controlar la interacción del robot con el entorno.
45Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
Características de la información visual y fuerza.Aproximaciones para control de movimiento utilizando visión y fuerza:
Control de impedancia:! Especifica la relación dinámica entre fuerza y movimiento.
Control híbrido:! Divide el espacio de control en:
! Direcciones controladas por fuerza.! Direcciones controladas por visión.
! Se especifica la tarea atendiendo a un conocimiento geométrico previo.
46Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
Características de la información visual y fuerza.Aproximaciones para control de movimiento utilizando visión y fuerza.
! Control híbrido:! Control simultáneo de distintas direcciones por visión y fuerza.
! Control alternado:! Una dirección es controlada alternativamente por visión y fuerza.
! Control compartido:! Control simultáneo de la misma dirección con visión y fuerza.
Niveles en la integración de fuerza y visión:

47Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
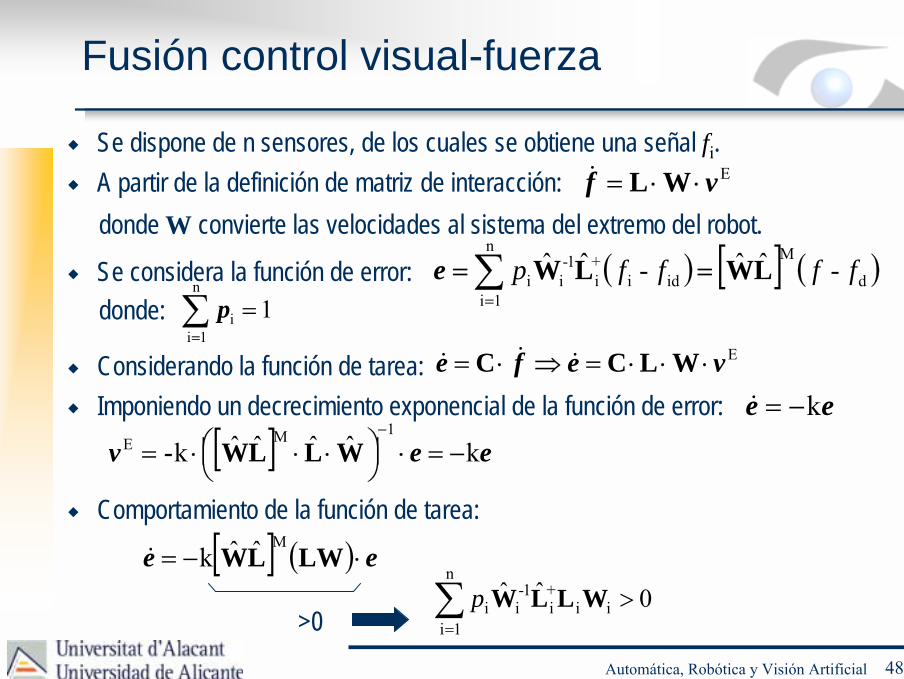
! Se dispone de n sensores, de los cuales se obtiene una señal fi.
48Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
! Se dispone de n sensores, de los cuales se obtiene una señal fi.
( ) [ ] ( )d
Mn
1iidi
+i
1-ii -��-�� ffffp LWLW ==∑
=
e! Se considera la función de error:donde: ∑
=
=n
1ii 1p
! Considerando la función de tarea: Evefe ⋅⋅⋅=⇒⋅= WLCC &&&
ee k−=&! Imponiendo un decrecimiento exponencial de la función de error:[ ] ee-v k����k
1ME −=⋅
⋅⋅⋅=
−
WLLW
! Comportamiento de la función de tarea:
[ ] ( ) ee ⋅−= LWLWM��k&
0��n
1iii
+i
1-ii >∑
=
WLLWp>0
Evf ⋅⋅= WL&
donde W convierte las velocidades al sistema del extremo del robot.! A partir de la definición de matriz de interacción:

49Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
! Arquitectura globlal del sistema.
Sensor de fuerza JR3 67M25A-I40
Mesa giratoria ESHED ROBOTEC
JAI-M536Par estéro externo
EVI D-31
MitsubishiPA10

50Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
! Arquitectura globlal del sistema.! Sistema de visión:
! Fase 1: Utilización del sistema de visión externo para obtener la localización aproximada del objeto.
! Fase 2: Funcionamiento conjunto de ambos sistemas de visión.

51Automática, Robótica y Visión Artificial
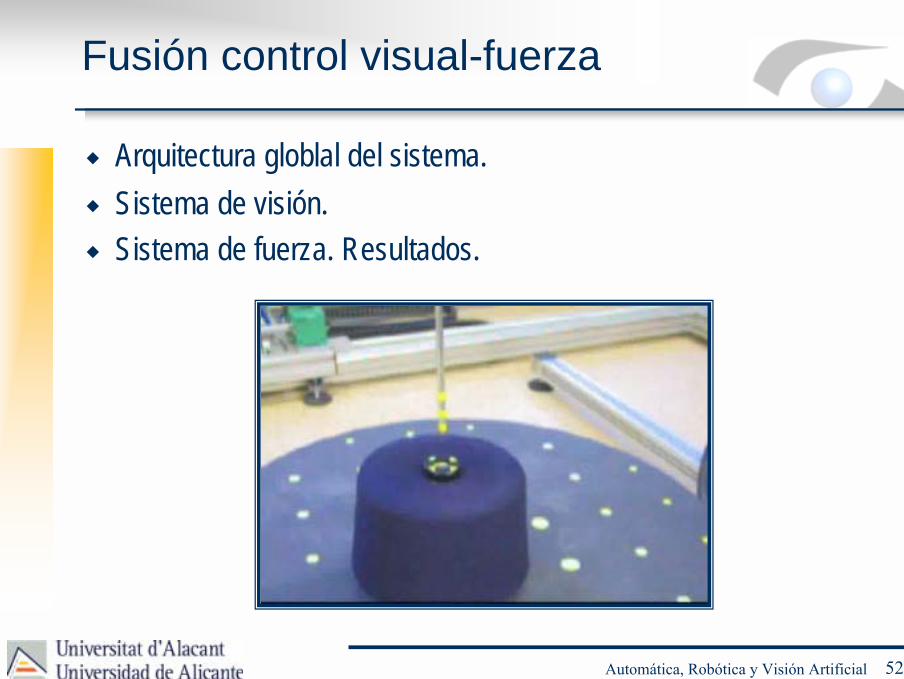
Fusión control visual-fuerza
! Arquitectura globlal del sistema.! Sistema de visión.! Sistema de fuerza. Resultados.
-60
-50
-40
-30
-20
-10
0
10
1 11 21 31 41 51 61 71 81 91 101 111 121 131
Iterations
Fx
Fy
Fz
Fuerza en N
-1-0,8-0,6-0,4-0,2
00,20,40,60,8
1
1 13 25 37 49 61 73 85 97 109 121 133
Iteraciones
Fuerza en N
FxFyFz
-14-12-10
-8-6-4-202
1 72 143 214 285 356 427 498 569 640 711
Fx
Fy
Fz-20
-15
-10
-5
0
5
1 79 157 235 313 391 469 547 625 703 781
FxFy
Fz
52Automática, Robótica y Visión Artificial
Fusión control visual-fuerza
! Arquitectura globlal del sistema.! Sistema de visión.! Sistema de fuerza. Resultados.
© Grupo de Automática, Robótica y Visión Artificial
http://www.dfists.ua.es/aurova
Top Related