







Idiomas
Páginas
Jurídico

UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
EJERCICIO.
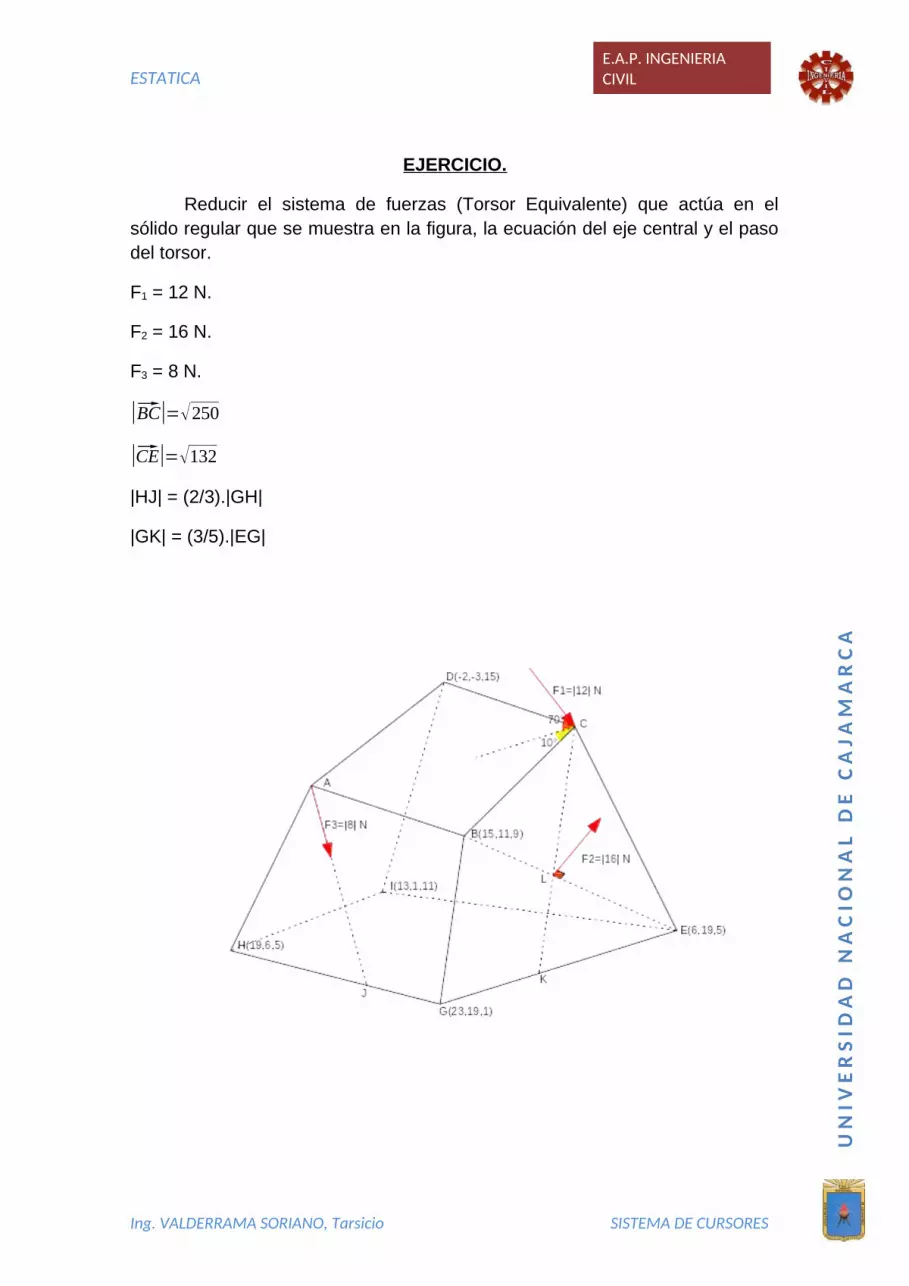
Reducir el sistema de fuerzas (Torsor Equivalente) que actúa en el sólido regular que se muestra en la figura, la ecuación del eje central y el paso del torsor.
F1 = 12 N.
F2 = 16 N.
F3 = 8 N.
|⃗BC|=√250
|⃗CE|=√132
|HJ| = (2/3).|GH|
|GK| = (3/5).|EG|
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES

UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
SOLUCIÓN.
1. Calculo de los puntos:
1.1. Calculo del punto “C”:
Hallando la ecuación del plano BCEG:
G⃗C . (G⃗B x ¿⃗)=0
( x−23 , y−19 , z−1 ) .( i→
j→
k→
−8 −8 8−17 0 4 )=0
( x−23 , y−19 , z−1 )(−32 ,−104 ,−136)=0−32 x−104 y−136 z+2848=032 x+104 y+136 z=2848 . . .(1)
Por dato tenemos:
|⃗BC|=√250√(x−15)2+( y−11)2+(z−9)2=√250
(x−15)2+( y−11)2+(z−9)2=250 . . .(2)
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
|⃗CE|=√132√(6−x )2+(19− y )2+(5−z)2=√132
(6−x)2+(19− y )2+(5−z)2=132 . ..(3)De (1), (2) y (3) tenemos:
32 x+104 y+136 z=2848 . . .. . . .. . . .(1)(x−15)2+( y−11)2+(z−9)2=250 . . .(2)(6− x)2+(19− y)2+(5−z )2=132 .. .(3)
∴C=(−0.5315,12 .2962,11.6632)
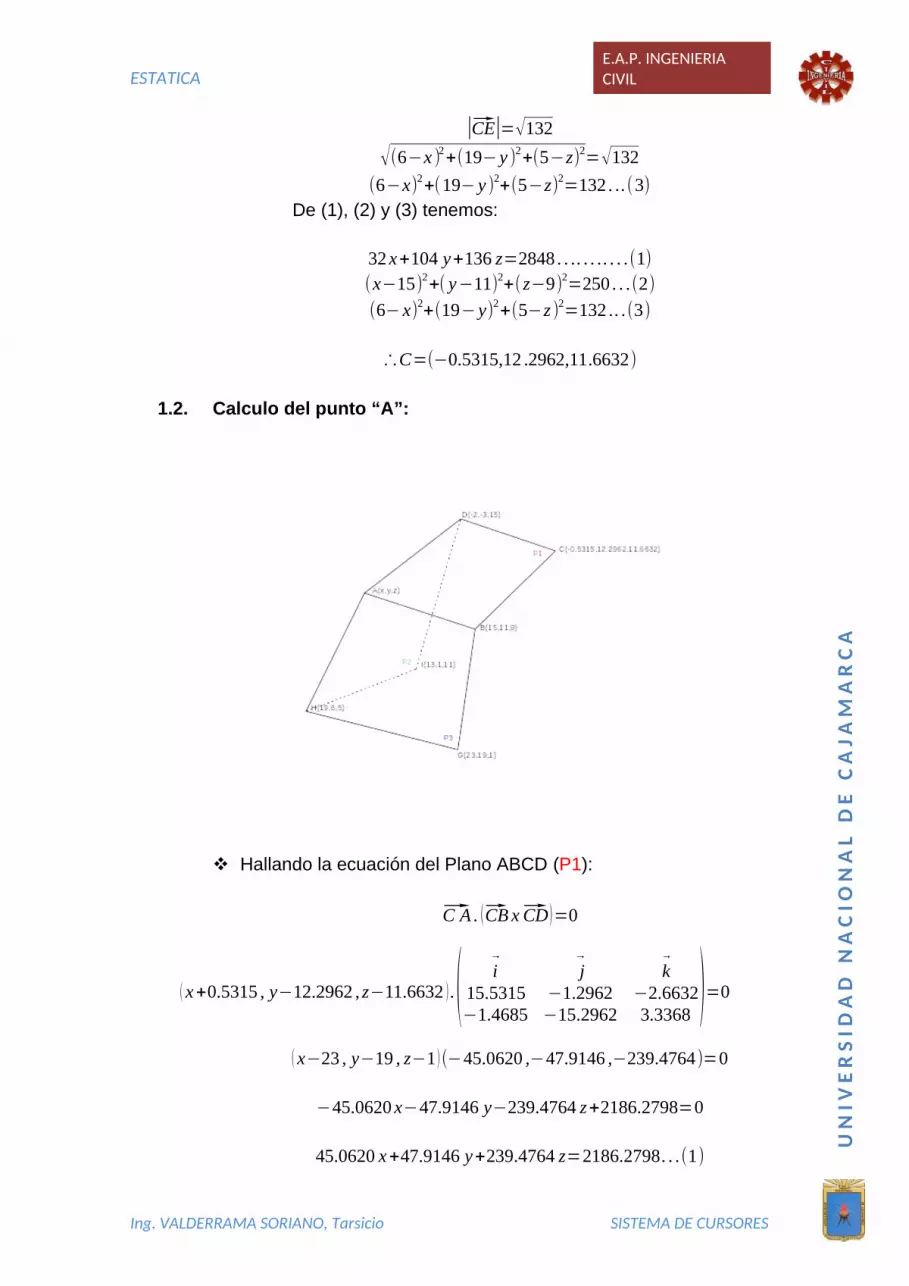
1.2. Calculo del punto “A”:
Hallando la ecuación del Plano ABCD (P1):
C⃗ A . (C⃗B x C⃗D)=0
( x+0.5315 , y−12.2962 , z−11.6632 ) .( i→
j→
k→
15.5315 −1.2962 −2.6632−1.4685 −15.2962 3.3368 )=0
( x−23 , y−19 , z−1 )(−45.0620 ,−47.9146 ,−239.4764)=0
−45.0620 x−47.9146 y−239.4764 z+2186.2798=0
45.0620 x+47.9146 y+239.4764 z=2186.2798 . . .(1)
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
Hallando la ecuación del Plano ADIH (P2):
I⃗A . ( I⃗D x I⃗H )=0
( x−13 , y−1 , z−11) .( i→
j→
k→
−15 −4 46 5 −6)=0
( x−23 , y−19 , z−1 )(4 ,−66 ,−51)=0
4 x−66 y−51 z+1213=0
4 x−66 y−51 z=−1213 . .. (2)
Hallando la ecuación del Plano ABGH (P3):
G⃗I . (G⃗H xG⃗B )=0
( x−23 , y−19 , z−1 ) .( i→
j→
k→
−4 −13 4−8 −8 8)=0
( x−23 , y−19 , z−1 )(−72,0 ,−72)=0
−72 x+0 y−72z+1728=0
72 x+0 y+72 z=1728 . ..(3)
De (1), (2) y (3) tenemos:
45.0620 x+47.9146 y+239.4764 z=2186.2798 . . .(1)
4 x−66 y−51 z=−1213 . .. . . .. . . .. . . .. . . ..(2)
72 x+0 y+72 z=1728 . .. . . .. . . .. . . .. . . .. .(3)
∴ A=(23,19,1)
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
2.3. Calculo del punto “J”:
Por dato tenemos:
|⃗HJ|=23|⃗GH|.. . .. . .(1)
Pero:
u⃗HJ=H⃗J
¿⃗HJ∨¿⇒|HJ|= H⃗Ju⃗HJ
¿
u⃗HJ=−u⃗GH
u⃗GH=G⃗H
¿⃗GH∨¿⇒|GH|=G⃗Hu⃗GH
¿
Reemplazando los enunciados anteriores en (1) tenemos:
H⃗Ju⃗HJ
=23G⃗Hu⃗GH
H⃗Ju⃗HJ
=−23
G⃗Hu⃗HJ
H⃗J=−23
G⃗H
( x , y , z )−(19,6,5 )=−23
(−4 ,−13,4 )
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
( x , y , z )=( 653 , 443, 73 )
∴ J=( 653 , 443, 73 )
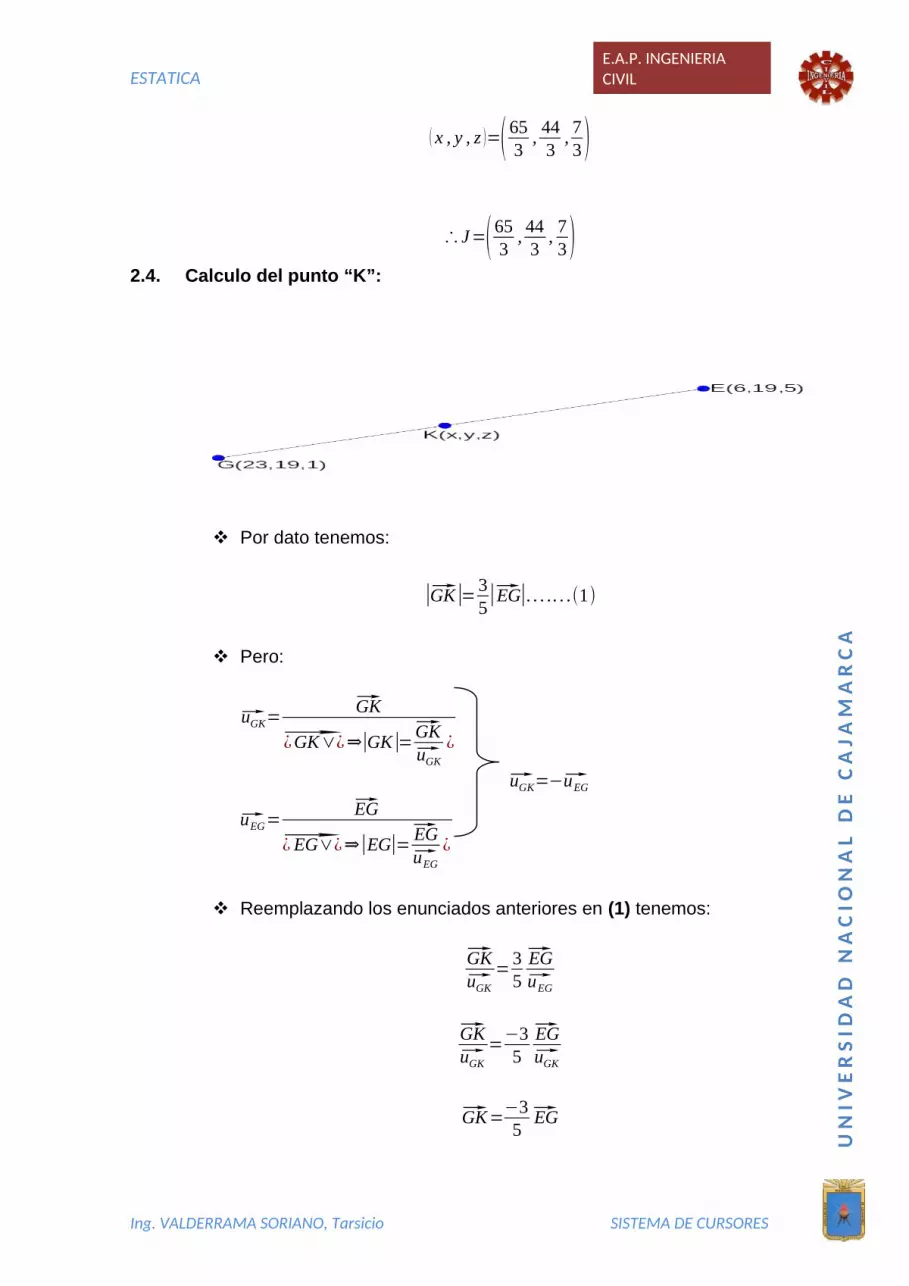
2.4. Calculo del punto “K”:
Por dato tenemos:
|⃗GK|=35|⃗EG|. . . .. . .(1)
Pero:
u⃗GK=G⃗K
¿⃗GK∨¿⇒|GK|= G⃗Ku⃗GK
¿
u⃗GK=−u⃗EG
u⃗EG=E⃗G
¿⃗ EG∨¿⇒|EG|= E⃗Gu⃗EG
¿
Reemplazando los enunciados anteriores en (1) tenemos:
G⃗Ku⃗GK
=35E⃗Gu⃗EG
G⃗Ku⃗GK
=−35
E⃗Gu⃗GK
G⃗K=−35
E⃗G
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES

UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
( x , y , z )−(23,19,1 )=−35
(17,0 ,−4 )
( x , y , z )=( 645 ,19 , 175 )
∴K=( 645 ,19 , 175 )
2.5. Calculo del punto “L”:
Hallando las ecuaciones vectoriales de las rectas L1, L2:
L1={( 645 ,19 , 175 )+α (−13.3315 ,−6.7038,8 .2632 )}
L2={(6,19,5 )+β (9 ,−8,4 ) }
Sea L ∈ L1 ⋀ L2, Entonces: L ∈ L1 ⋀ L ∈ L1
Si L∈ L1⟹ L( 645 −13.3315α ,19−6.7038α , 175
+8.2632α)Si L∈ L2⟹ L (6+9 β ,19−8β ,5+4 β )
Como L ∈ L1 ⋀ L ∈ L1, tenemos:
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
( 645 −13.3315α ,19−6.7038α , 175
+8.2632α )=(6+9β ,19−8 β ,5+4 β )
645
−13.3315α=6+9 β
19−6.7038α=19−8 β; Entonces:α=0.3339 , β=0.2825
175
+8.2632α=5+4 β
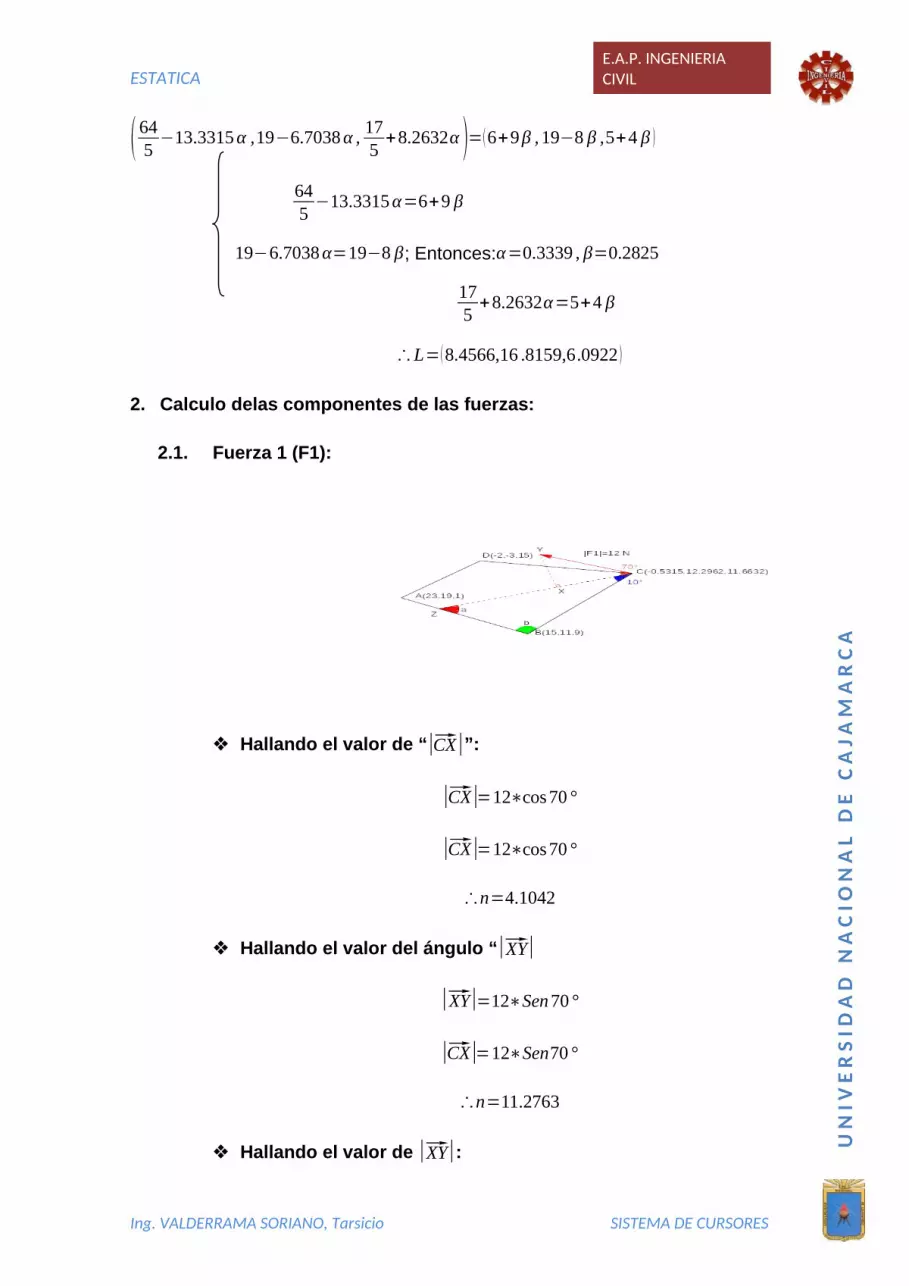
∴L=(8.4566,16 .8159,6.0922 )
2. Calculo delas componentes de las fuerzas:
2.1. Fuerza 1 (F1):
Hallando el valor de “|⃗CX|”:
|⃗CX|=12∗cos70 °
|⃗CX|=12∗cos70 °
∴n=4.1042
Hallando el valor del ángulo “|⃗XY|
|⃗XY|=12∗Sen70 °
|⃗CX|=12∗Sen70 °
∴n=11.2763
Hallando el valor de |⃗XY|:
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
tan a°=|⃗XY|n
|⃗XY|=5.7676∗tan(61.3722° )
∴|⃗XY|=10.5663
Hallando el valor del ángulo b:
B⃗A . B⃗C=(|⃗BA|) (|⃗BC|)∗cosb
b=cos−1 B⃗A . B⃗C
(⃗|BA|) (⃗|BC|)
b=128.1007 °
Hallando el valor del ángulo b:
a+b+10°=180
a+128.1007°+10 °=180 °
a=41.8993 °
Hallando el valor del punto “Z”:
sina15.8114
= sin 10
|⃗BZ|
|⃗BZ|=15.8114∗sin 10sin 41.8993
|⃗BZ|=4.1113 . . .. .(1)
u⃗BA=B⃗A
|⃗BA|= u⃗BZ
u⃗BA=(0.5774,0.5774 ,−0.5774 ) . . . .(2)
De uno (1), (2) tenemos:
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
u⃗BZ=B⃗Z
|⃗BZ|
B⃗Z=|⃗BZ|∗u⃗BA
B⃗Z=4.1113∗(0.5774 ;0.5774 ;−0.5774)
Z=4.1113∗(0.5774 ;0.5774 ;−0.5774 )+ B⃗
∴Z=(17.3737,13.3737,6 .6263) Hallando el valor del punto “X”:
u⃗CZ=C⃗Z
|⃗CZ|=u⃗CX .. . . ..(1)
u⃗CZ=(0.9610,0 .0578 ,−0.2703 ) . . . ..(2)
De (1), (2) tenemos:
u⃗CX=C⃗X
|⃗CX|C⃗X=|⃗CX|∗u⃗CZ
C⃗X=4.1042∗u⃗CZ
X=4.1042∗u⃗CZ+C
X=4.1042∗(0.9610,0.0578 ,−0.2703 )+C
X=(3.4127,12 .5335,10.5537)
Hallando el valor del punto “Y”:
Hallando un vector unitario normal al plano ABCD:
N⃗=C⃗D xC⃗B
N⃗=( i⃗ j⃗ k⃗−1.4685 −15.2962 3.336815.5315 −1.2962 −2.6632)
N⃗= (45.0670,47 .9146,239.4764 )
Entonces:
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES

UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
u⃗N=N⃗
|⃗N|
u⃗N=(0.1814,0 .1979,0 .9643)
Luego:
u⃗XY=X⃗Y
|⃗XY|= u⃗N
X⃗Y=|⃗XY|∗u⃗N
Y=|⃗XY|∗u⃗N+X
Y=11.2763∗(0.1814,0 .1979,0.9643)+X
∴Y=(5.5482,14 .7087,21 .4274)
Hallando el valor de la fuerza 1 ( F1):
F⃗1=Y⃗C
F⃗1=C−Y
F⃗1=(−0.5315,12.2962,11.6632)−(5.5482,14 .7087,21 .4274)
∴⃗F1=(−5.9897 ,−2.4125,−9.7642)
2.2. Fuerza 2 (F2):
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
F⃗2=u⃗N∗|F⃗2|. .. . . .. . . .(1)
Hallando u⃗N:
u⃗N=L⃗B x L⃗G
¿ L⃗B x L⃗G∨¿¿
u⃗N=(23.2648,75.6096,98 .8744)
248.3452
∴⃗ uN=(0.1837,0.5971,0 .7808)
Reemplazando en (1):
F⃗2=(−0.1837 ,−0.5971 ,−0.7808)∗16
∴⃗F2=(2.9396,9 .5537,12.4934)
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
2.3. Fuerza 3 (F3):
Por dato tenemos:
Como u⃗F3=u⃗AJ , se tiene:
u⃗ AJ=A⃗J
¿⃗AJ∨¿=(−1.3333 ,−4.3333,1.3333)
¿(−1.3333 ,−4.3333,1 .3333)∨¿=(−0.2821,−0.9169,0 .2821)¿¿
u⃗F3=u⃗AJ=F⃗3
¿⃗F3∨¿=⇒ F⃗3=|F3|∗uAJ ¿
F⃗3=8∗(−0.2821,−0.9169,0 .2821)∴ F⃗3=(−2.2571 ,−7.3356,2.2571)
3. Hallando el vector resultante:
R⃗=F⃗1+ F⃗2+ F⃗3
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
∴ R⃗=(−5.3072 ,−0.1944,4 .9863)
4. Hallando el momento de las fuerzas respecto al origen:
MOR⃗=O⃗C x F⃗1+O⃗L x F⃗2+O⃗A x F⃗3
MOR⃗=( i⃗ j⃗ k⃗
−0.5315 12.2962 11.6632−5.9897 −2.4125 −9.7642)+( i⃗ j⃗ k⃗
8.4566 16.8159 6. 09222.9396 9.5537 12.4934)+( i⃗ j⃗ k⃗
23 19 1−2.2571 −7.3356 2.2571)
MOR⃗= (−91.9251 ,−75.0487,74 .9328 )+(151.8847 ,−87.7431,31 .3598,31.3598 )+(50.2205 ,−54.1704 ,−125.8339)
∴MOR⃗=(110.1801 ,−216.9622,−19.5413)
5. Hallando el momento mínimo (M’):
M '=MO
R⃗ . R⃗¿ R⃗∨¿¿
M '=(110.1801 ,−216.9622 ,−19.5413 ) .(−5.3072 ,−0.1944,4 .9863)
¿(−5.3072,−0.1944,4 .9863)∨¿¿
∴M '=−87.8562
6. Calculo del eje central Q⃗:
Q⃗=R⃗ x MO
R⃗
¿ R⃗∨¿2¿
Q⃗=(−5.3072,−0.1944,4 .9863)x (110.1801 ,−216.9622 ,−19.5413 )
¿ (−5.3072 ,−0.1944,4 .9863)∨¿2¿
∴Q⃗=(20.4577,8 .3984,22.1017)
7. Ecuación del Eje Central:
L :P=Q⃗+φ∗R⃗
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
UN
IVE
RS
IDA
D N
AC
ION
AL
DE
CA
JAM
AR
CA
ESTATICAE.A.P. INGENIERIA CIVIL
∴L :P=(20.4577,8.3984,22 .1017)+φ(−5.3072 ,−0.1944,4 .9863)
8. Paso del Torsor:
Pasodel Torsor= M '¿ R⃗∨¿¿
Pasodel Torsor= −87.8562¿(−5.3072 ,−0.1944,4 .9863)∨¿¿
∴Pasodel Torsor=−12.0630
9. INTEGRANTES:
BRINGAS RUMAY, Ronal Israel BUSTAMANTE RUITON, Edward BUSTAMANTE VASQUEZ, Yuri Alexander CASTOPE GONZALES, Lodar DILAS GONZALES, Jhony Alex
Ing. VALDERRAMA SORIANO, Tarsicio SISTEMA DE CURSORES
Top Related