



![[Rosario] Pensando en automatizar procesos - Nadia Álvarez](https://static.fdocuments.co/doc/165x107/546c2b89af795967298b4f2e/rosario-pensando-en-automatizar-procesos-nadia-alvarez.jpg)



Idiomas
Páginas
Jurídico


UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE INGENIERÍA INDUSTRIAL DEPARTAMENTO ACADÉMICO DE GRADUACIÓN
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE
INGENIERO EN TELEINFORMÁTICA
ÁREA SISTEMAS
TEMA
“ESTUDIO Y DISEÑO DE UN SISTEMA ELECTRÓNICO DIRIGIDA POR COMANDO DE VOZ
PARA AUTOMATIZAR UNA CAMA, PARA PACIENTES CON CAPACIDADES ESPECIALES Y
PROBLEMAS DE MOVIMIENTO”.
AUTOR
PEÑA VERA CRISTHIAN GEOVANNY
DIRECTOR DEL TRABAJO ING. SIST. GARCÍA TORRES INGRID ANGÉLICA,MGTR
2017
GUAYAQUIL – ECUADOR

ii
DECLARACIÓN DE AUTORÍA
“La responsabilidad del contenido de este Trabajo de Titulación, me
corresponde exclusivamente; y el patrimonio Intelectual del mismo a la
Facultad de Ingeniería Industrial de la Universidad de Guayaquil”
Peña Vera Cristhian Geovanny
c/c: 0926963687

iii
DEDICATORIA
Dedico este trabajo a Dios por darme inteligencia, inspiración y fortaleza
para salir adelante y a mis padres y hermanos por su ayuda constante.

iv
AGRADECIMIENTO
Agradezco a Dios por ser mi fuente de inspiración y fortaleza para seguir
siempre hacia adelante.
Agradezco a mi familia por ser ese apoyo y pilar fundamental en mi vida.
Agradezco a mis padres por sus consejos, por su apoyo en cada
momento de mi vida.
Agradezco a mi tutora la ING. Ingrid García por ser una buena guía y
saber conducirme hacia el objetivo.

v
ÍNDICE GENERAL
CAPÍTULO I
EL PROBLEMA
N° Descripción Pág.
1.1 Introducción 2
1.2 Objeto de la investigación 3
1.3 Justificación de la investigación 3
1.4 Objetivos de la investigación 4
1.4.1 Objetivos general 4
1.4.2 Objetivos específicos 4
1.5 Limitación del problema 5
1.5.1 Marco teórico 5
1.5.2 Antecedentes del estudio 5
1.6 Fundamentación teórica 8
1.6.1 Reconocimiento de voz 8
1.6.2 Micro-controladores 9
1.6.3 EasyVR 11
1.6.3.1 Características 12
1.6.3.2 Aplicaciones 12
1.6.4 Arduino 13
1.6.4.1 Como funciona Arduino 13
1.6.4.2 Características generales de la placa 15
1.6.4.3 Porque usar Arduino 16
1.6.4.4 Características de las distintas avr con sus
Respectivos micro-controlador 18
1.6.5 Fundamentación legal 19

vi
CAPÍTULO II
METODOLOGÍA
N° Descripción Pág.
2.1 Diseño de un sistema electrónico dirigido 21
por comando de voz para la automatización
de una cama.
2.2 Reconocimiento de voz y sus diferentes formas de
Funcionamiento 21
2.3 Limitaciones 22
2.4 Modulo EasyVR 23
2.5 Conexiones 24
2.5.1 Conexión UP 25
2.5.2 Conexión PC 25
2.6 Micrófono 26
2.7 Salida de audio 27
2.8 Comando de voz 27
2.9 Cargar la tabla de sonido 29
2.9.1 Para qué sirve Quicksynthesis 29
2.9.2 Crear una tabla de sonido brevemente en
Los siguientes pasos 29
2.9.3 Creada la tabla de sonido, ahora hay que
Añadirla al módulo 36
2.10 El módulo de 8 relés 40
2.10.1 Características 40
2.11 Interfaz de control mediante reconocimiento de
Voz con el programa del micro-controlador para
Que pueda cumplir el movimiento de la cama 42

vii
2.12 Sistema de alimentación de los circuitos 43
2.13 Arduino mega 44
2.13.1 Configuraciones 44
2.13.2 Programación 44
2.13.3 Hardware que utiliza el Arduino para su
Conectividad 46
2.13.4 Diagrama de instalaciones del Arduino mega
Y sus conexiones de control y sistema
Electrónico 46
2.13.5 Comunicación entre el módulo Arduino y el
Software del EasyVR 47

viii
CAPÍTULO III
ANÁLISIS E INTERPRETACIÓN DE LOS RESULTADOS
N° Descripción Pág.
3.1 implementación del prototipo Automatizado
Encargado de funcionar mediante Comandos
De voz para movilizar a las personas Con
Capacidades especiales y problemas de
Movimientos 51
3.1.1 Conexión entre el micrófono y el EasyVR 51
3.1.2 conexión de salida de audio del Arduino en
El módulo EasyVR 52
3.1.3 Conexión entre el módulo EasyVR y el modulo
Arduino mega 52
3.1.4 montaje y conexiones del módulo de 8 relés 53
3.1.5 Ensamblaje del software 54
3.1.6 Sistematización software 55
3.1.7 Tabla de sonidos 56
3.1.8 Asentamiento del sistema 57
3.1.9 Observaciones sobre el prototipo electrónico
dirigido por comando de voz 59
3.2 IMPACTO: Indicadores de cada etapa de la
Investigación para ver si se ha cumplido con
Los objetivos expresados en el proyecto 60
3.2.1 prueba del funcionamiento del EasyVR 60
3.2.2 prueba de funcionamiento del Arduino mega 61
3.2.3 prueba de funcionamiento de la Integración
Del Arduino y el EasyVR 62
3.2.4 prueba de funcionamiento de la cama

ix
Automatizada 62
3.2.5 Análisis técnicas 63
3.3 Análisis del proyecto implementado 65
3.3.1 Análisis positivo 65
3.3.2 Análisis negativo 66
3.4 Costo del proyecto 66
3.5 Conclusión 68
3.6 Recomendaciones 69
Anexos 70
Bibliografías 76

x
ÍNDICE DE TABLAS
N° Descripción Pág.
1 Diferentes avr con sus características y
Sus respectivos micro-controladores 18
2 muestra los comandos predefinidas en
Diferentes idiomas 28
3 Tabla de compresión de tiempo disponible 39
4 Grupos de comandos para la comunicación
Entre el Arduino y el EasyVR mediantes sus
Protocolos y líneas de programación 48
5 Se muestra los sonidos generados y subidos
Al módulo EasyVR 56
6 Prueba del EasyVR 61
7 Prueba del Arduino mega 61
8 Prueba de la cama automatizada 63
9 Evaluación y observación 64
10 Muestra las condiciones de trabajo 64
11 Cargas eléctricas, voltajes máximos y mínimos 65
12 Consumo de corriente del EasyVR en funcionamiento
Activo 65
13 Parte electrónica 66
14 Parte eléctrica 67
15 Otros gastos 67

xi
ÍNDICE DE FIGURA
N° Descripción Pág.
1 Maqueta de encendido y apagado de luces
Mediante reconocimiento de voz 6
2 Asistencia hacia las personas con discapacidades
De movimientos 7
3 Cama para pacientes que se automatizará
Mediante el sistema electrónico por comando
De voz. 8
4 Parte interna de un micro-controlador 10
5 Módulo EasyVR encargado de reconocer
El comando de voz 11
6 Placa de Arduino 15
7 Placa de Arduino con sus características
Y elementos 16
8 Interfaz de control dividido en 4 fase utilizando
Un reconocimiento de voz 21
9 Circuito que muestra las conexiones entre el modulo
EasyVR y el Arduino 26
10 Clic en la hoja en blanco para abrir un proyecto
Nuevo 30
11 Selecciona ok en RSC4 31
12 Se asigna un nombre al proyecto 31
13 Se da clic en la cruz verde y selecciona los archivos
De audio 32
14 Se deja el valor por default, y se da clic en ok for all 32
15 Auto label all 33
16 Se busca el botón verde que dice built 33

xii
17 Se da clic en ok 34
18 Clic en ok 34
19 En esta ventana aparecerá en rojo 35
20 Cuando se ha terminado quedará en verde 35
21 Clic en ok 36
22 Capture del montaje de la tabla de sonidos 37
23 Nueva tabla de sonido cargada al módulo 38
24 Muestreo de compresión y de frecuencia del
Sensory quicksynthesis 39
25 Placa de un módulo de 8 relés para la conmutación
De cargas de potencia 40
26 Conexiones del módulo de 8 relés con el modulo
Arduino 41
27 Explica los pines de alimentación de los módulo 44
28 Diagrama de flujo que muestra el trabajo de los
Comandos en un tiempo de 2 segundos 45
29 Circuito de las conexiones eléctricas del Arduino 47
30 Nos enseña mediante una gráfica el funcionamiento
Paso a paso del proceso de los comandos que se
Utilizaran 49
31 Muestra el funcionamiento completo del proyecto
De reconocimiento de voz 50
32 Placa del EasyVR conectado al micrófono 51
33 Placa con su respectiva salida de audio 52
34 Ensamblaje del Arduino y el módulo EasyVR con
Sus conexiones 53
35 Montaje del módulo de relés con el Arduino 53
36 Muestra la consola de plástico que se utilizara para
El proyecto 54
37 Capture del proceso de programación del Arduino 55

xiii
N° Descripción Pág.
38 Conexiones de los motores en la cama 57
39 Implementaciones de toma de corrientes 58
40 Análisis de la corriente para el uso de cableado 58
41 Muestra el producto terminado de la cama
Automatizada por comando de voz 59

xiv
ÍNDICE DE ANEXOS
N° Descripción Pág.
1 Ley orgánica de discapacidades 71
2 Audacity 73
3 Balabolka 74
4 Fritzing 75

xv
AUTOR: PEÑA VERA CRISTHIAN GEOVANNY TITULO: ESTUDIO Y DISEÑO DE UNA SISTEMA ELECTRÓNICO DIRIGIDA POR COMANDO DE VOZ PARA AUTOMATIZAR UNA CAMA, PARA PACIENTES CON CAPACIDADES ESPECIALES Y PROBLEMAS DE MOVIMIENTO. DIRECTOR: ING. GARCÌA TORRES INGRID ANGÉLICA, MGTR
RESUMEN
El proyecto consiste en el estudio e implementación de una cama con un sistema electrónico, con el objetivo de automatizar mediante comandos de voz, sin la necesidad de utilizar ningún interfaz físico tales como teclado o controles. se detalla la implementación de la tecnología de reconocimiento de voz a través del módulo EasyVR y el módulo Arduino que permite controlar los motores que dan el movimiento de la cama, así facilitará los problemas de las personas con discapacidades o con problemas de movimiento. Se incluirá en este capítulo los objetivos trazados para este proyecto y la metodología del mismo. Luego se encuentra detallado la información del marco teórico que trata sobre los conceptos necesarios que sustentan la información para entender de mejor manera el funcionamiento del proyecto. La última parte se trata de la implementación del sistema electrónico dirigido por comando de voz para una cama para personas con discapacidades, en esta parte se subdivide en 4 etapas que es el diseño electrónico, diseño de software, el diseño mecánico y en la última parte se detallan las pruebas de funcionalidad que fue sometido el prototipo incluyendo la conclusión, recomendaciones y anexos.
Palabras claves: EasyVR, Arduino, Automatización, metodología
Peña Vera Cristhian Geovanny ING. García Torres Ingrid Angélica, MGTR c/c 0926963687 Directora de titulación

xvi
AUTHOR: PEÑA VERA CRISTHIAN GEOVANNY TITLE: STUDY AND DESIGN OF AN ELECTRONIC SYSTEM DIRECTED BY VOICE COMMAND TO AUTOMATE A BED, FOR PATIENTS WITH SPECIAL CAPACITIES AND MOVEMENT PROBLEMS. DIRECTOR: ING. GARCÌA TORRES INGRID ANGELICA, MGTR
ABSTRACT
The project consists of the study and implementation of a bed with an electronic system, with the aim of automating with voice commands, without the need to use any physical interface such as keyboard or controls. In the project we give details on the implementation of voice recognition technology through the module EasyVR and the Arduino module that allows control the engines that give the movement of the bed, thus helping to solve the problems of people with disabilities or with movement problems. This chapter will include the objectives outlined for this project and its methodology. Then the information of the theoretical framework that deals with the necessary concepts that support the information to better understand the operation of the project is detailed. The last part is the implementation of the electronic system directed by voice command for a bed for people with disabilities. This part is subdivided into four stages which are: electronic design, software design, and mechanical design and in the last part we detail the functionality tests to which the prototype was summited; including the conclusion, recommendations and annexes.
KEYWORDS: EasyVR, Arduino, Automation, methodology
Peña Vera Cristhian Geovanny ING. García Torres Ingrid Angélica,MGTR
c/c 0926963687 Director of degree

PRÓLOGO
El objetivo de esta investigación es de exponer mediante la tecnología la
elaboración de un sistema automatizado por comando de voz para el
movimiento de una cama para las persona con discapacidades y problemas
del movimiento con el fin de mejorar la atención hospitalaria o en cualquier
lugar del país que se encuentre.
Para haber hecho posible este proyecto se tuvo que hacer estudios
previos y análisis sobre la cantidad de personas discapacitadas que hay
dentro del país y que requieren movilizarse por voluntad propia y la
aceptación de este proyecto fue exitoso.
Luego del proceso y análisis del resultado que justificaran la
aceptación del estudio, se procedió al estudio de los diferentes tipos de
elementos que se usaran para el proyecto.
Se tomaron en cuenta varios proyectos similares realizados en otros
países, los mismos que sirvieron de referencia para la fabricación del
prototipo de este trabajo de investigación.
El motivo para el desarrollo de este proyecto es de permitir que la
tecnología se relaciones más con las medicinas y que pueda haber una
mejor atención y comodidad para estos tipos de personas con distintos
tipos de discapacidades.

CAPÍTULO I
EL PROBLEMA
1.1 Introducción
En el Ecuador existe 415.500 personas registradas con
discapacidades lo cual está entre los porcentajes más altos de América, en
el guayas se registran 99.281 personas discapacitadas. Las personas que
sufren discapacidades física en el país es de 47.19% dentro de esta
discapacidad están las personas con problemas de lesiones medulares que
conllevan a la discapacidad hemipléjicas, parapléjicas, tetrapléjicas.
También existen otras discapacidades que se generan por accidentes, y
pierden algunas extremidades del cuerpo como son los brazos o piernas,
todas estas enfermedades llevan a ser una discapacidad que limita el
movimiento de las personas.
Luego del previo estudio de todas las personas con discapacidades
de movimiento en las clínicas, hospitales y centros de salud, estas brindan
un servicio muy deficiente a los pacientes que llegan para ser atendidos, ya
sea por falta de dispositivos, insumos médico o por falta de personal.
Este tipo de enfermedades o discapacidades se requiere de una
buena atención y dedicación, ya que son pacientes que no pueden
moverse por sus propios medios y necesitan ayuda de otras personas.
Por esta razón se quiere implementar un sistema electrónico
automatizado dirigido por comando de voz para la movilización de una
cama para estos tipos de discapacidades, la idea surgió porque ya es el
momento, que en Guayaquil-Ecuador la salud se maneje mediante una
buena tecnología de punta, que todo sea automatizado para la comodidad
del-paciente.

El problema 3
Por medio de este proyecto nos da la oportunidad de mostrar que la
tecnología es una realidad para todas las personas, como lo es en los
estados Unidos, Rusia y China.
La información está dividida en el marco teórico que trata sobre los
conceptos necesarios que verifica la información para entender de mejor
manera sobre el funcionamiento del proyecto, y la parte conceptual que
básicamente se encuentra detallado en especificaciones técnicas de cada
elemento electrónico y el motivo por el cual fue elegido este diseño
automatizado. (Investigacion directa)
1.2 Objeto de la investigación
El objeto de la investigación es diseñar un sistema electrónico
dirigido por comando de voz para automatizar una cama, para pacientes
con discapacidades de movimiento y poder mejorar las condiciones de
atención a personas con capacidades especiales.
El estudio del proyecto es moderno ya que se utilizará tecnologías
por comando de voz, también se utilizará el sistema de Arduino que
servirá para cumplir con las necesidades de las personas con
discapacidades.
1.3 Justificación de la investigación
No solo adultos, jóvenes y niños asisten a los hospitales, también
están las personas con discapacidades visuales, discapacidades motrices
y dificultades de movimientos.
Estas personas tienen problemas para subir, sentarse, llamar a las
enfermeras (o), para encender luces dentro de cualquier centro de salud.
Para estas personas el tiempo y estancia en los centros de salud y

El problema 4
hospitales no es muy placentero, además que se interrumpirán las labores
de los empleados y de otros usuarios que trataran de ayudar a estas
personas.
Hoy en día las camas de los hospitales son eléctricas y mecánicas
dificultando la autonomía del paciente y haciéndola dependiente de otras
personas para poder realizar algún tipo de movimiento.
Por este motivo se tiene la idea de mejorar este tipo de atención
diseñando por medio de un sistemas electrónico dirigido por comando de
voz para automatizar las camas para estas clases de pacientes con
capacidades especiales y así resolver los problemas para estas personas
con discapacidad que están internadas dentro de un centro de salud o en
su propio domicilio.
1.4 Objetivos de la investigación
1.4.1 Objetivo general
Diseñar un sistema electrónico dirigido por comando de voz mediante
el módulo EasyVR y el Arduino ATmega para la automatización de la cama
para pacientes con capacidades especiales.
1.4.2 Objetivos específicos
Investigar la situación actual de las personas con discapacidades
motrices o de movimientos para resolver sus necesidades.
Analizar los elementos y dispositivos que utilizaremos para la
realización del sistema automatizado dirigido por comando de voz
Diseñar el sistema automatizado mediante reconocimiento de voz
por el módulo EasyVR y el Arduino ATmega328.
Realizar las diferentes programaciones de Arduino mega y la
programación EasyVR con sus diferentes tipos de funcionamiento

El problema 5
1.5 Limitación del problema
1.5.1 Marco teórico
En este capítulo analizaremos los conceptos y características de cada
elemento que se utilizará en el diseño del prototipo, de la misma manera
con imágenes y gráficos que aporten a una mejor explicación del proyecto,
además describiremos detalladamente cada componente del sistema.
1.5.2 Antecedentes del estudio
En Paraguay se hizo un estudio similar al proyecto que queremos
emplear, Es muy importante que la tecnología facilite la vida de las
personas, en especial de aquellas con capacidades especiales.
Para esto la domótica se ocupa del monitoreo y acceso a dispositivos
dentro de las residencias para que las personas puedan tener un mejor
control sobre estas, permitiendo así la accesibilidad y la prevención de
accidentes a través del control a distancia.
En este caso, el sistema automatizado por comando de voz fue
diseñado para el encendido y apagado de luces dentro de un recinto para
personas con discapacidades.
Este estudio fue hecho en el año 2015 por la Facultad Politécnica de
la Universidad Nacional del Este. (Martinez, 2015)

El problema 6
FIGURA Nº 1
MAQUETA DE ENCENDIDO Y APAGADO DE LUCES MEDIANTE
RECONOCIMIENTO DE VOZ
Fuentes: file:///C:/Users/FACI/Documents/23-162-1-PB.pdf Elaborado por: Peña Vera Cristhian Geovanny (Martinez, 2015)
En la ciudad de Valencia-España en la Universidad Politécnica de
Valencia también se hizo un estudio previo sobre este sistema
automatizado por comando de voz en el año 2013 por Panta Martínez
Javier, se hizo el análisis para automatizar un hogar mediante comando de
voz.
El presente escrito documenta la creación de un sistema para
controlar un hogar mediante la voz, concretamente, este documento detalla
el proceso de análisis, diseño, implementación y pruebas de un prototipo
de interfaz por voz que se conecta a un sistema demótico.
El sistema demótico estaría compuesto de un servidor demótico y partes
móviles distribuidas dentro de un hogar. (Panta Martinez Javier, 2013)
Los objetivos planteados en este proyecto era de aplicar la tecnología
de reconocimientos de voz a comandos emitido por voz. En la actualidad
se ha hecho un breve análisis e investigación sobre la metodología y
sistema de atención para las personas con discapacidades motrices en los
diferentes centros de salud de la ciudad de Guayaquil, las personas con

El problema 7
estas discapacidad tienen muchos problemas al momento de moverse o
acomodarse de la manera que ellos deseen, por eso cuando llega el
momento de atender a estar persona se requiere de gran atención para
ellos, ya que no se pueden mover. Estas son cosa que en los hospitales no
les brindan esa cantidad de tiempo, Por lo tanto se genera un conflicto ya
que hay muchos pacientes en espera y poco personal de atención.
FIGURA Nº 2
ASISTENCIA HACIA LAS PERSONAS CON DISCAPACIDADES DE
MOVIMIENTO.
Fuentes: file:///C:/Users/FACI/Documents/23-162-1-PB.pdf Elaborado por: Peña Vera Cristhian Geovanny
Debido a todo esto hicimos el estudio previo para diseñar este
prototipo automatizado que funciona mediante comando de voz para poder
automatizar las cama que utilizarán cada uno de estos pacientes con
discapacidades y lo mejor de todo, es que el precio de esta inversión no
será muy alto y así resolveremos muchos problemas y ganaremos tiempo
para que todos tengan una buena atención ya que sin necesidad de tener
algún interfaz o control podrán ordenar a la cama y hacer el movimiento
que ellos necesiten mediante su voz.

El problema 8
FIGURA Nº 3
CAMA PARA PACIENTES QUE SE AUTOMATIZARÁ MEDIANTE
EL SISTEMA ELECTRÓNICO POR COMANDO DE VOZ.
Fuente: http://descansosalud.blogspot.com/2014/07/especial-camas-articuladas Elaborado por: Peña Vera Cristhian Geovanny
El propósito del proyecto es de incentivar y promocionar el diseño de
la cama automatizada para la comodidad de las personas con capacidades
especiales o por inmovilización.
De la misma manera gestionar la idea para los hospitales y centros
de salud de todo el país o cualquier establecimiento que se requiera, y
poder aportar ante la sociedad un sistema automatizado que cambiara de
manera absoluta la estadía hospitalaria en el país, para el mejoramiento de
atención hacia los pacientes con diferentes tipos de enfermedades sobre
todo las de movimiento.
1.6 Fundamentación teórica
1.6.1 Reconocimiento de voz
El reconocimiento de voz es la capacidad que tiene un ordenador de
convertir las palabras de la vos humana a un código binario. La mayoría de
las personas tienen la idea de que el reconocimiento de voz, se basa en
que un computador tiene una especie de oídos electrónico, en realidad este
sirve más como un traductor el cual convierte nuestro lenguaje, en uno
comprensible por la máquina.

El problema 9
El reconocimiento de voz, es el intento del equipo para identificar a la
persona que le habla, basándose en el tono único de su voz. Por lo tanto,
podemos decir que el reconocimiento de voz es una de las nuevas
tecnologías que nos permiten la entrada de comandos y datos a la
computadora, al igual que otras interfaces de entrada como el teclado, el
ratón o la pantalla táctil, entre otros. (directory M, 2015)
1.6.2 Micro-controladores
El micro-controlador fue inventado por Texas Instruments en la
década de 1970, casi al mismo tiempo que el primer microprocesador que
estaba siendo inventado en Intel.
Los primeros micro-controlador son simplemente microprocesadores
con una función de memoria, como la memoria RAM y ROM. Más tarde, los
micro-controladores se desarrollaron en una amplia gama
de dispositivos diseñados para aplicaciones de sistemas integrados
específicos en dispositivos tales como automóviles, teléfonos móviles y
electrodomésticos.
En 1971, el primer micro-controlador fue inventado por dos
ingenieros de Texas Instruments, de acuerdo con el Instituto Smith
soniano. Gary Boone y Michael Cochran crearon el TMS 1000, el cual era
un micro-controlador de 4 bits con función de ROM y RAM. El TMS 1000
estuvo disponible en varios tamaños de RAM y ROM. A partir de 1983,
cerca de un millón de TMS 1000 fueron vendidos. (eHOWenespañol,
2014)

El problema 10
FIGURA Nº 4
PARTE INTERNA QUE CONFORMAN UN MICRO-CONTROLADOR
Fuente: http://www.electronicaestudio.com/microcontrolador.htm#inicio Elaborado: Peña Vera Cristhian Geovanny (electronica estudio)
Un micro-controlador es un circuito integrado que en su interior
contiene una unidad central de procesamiento (CPU), unidades de
memoria (RAM y ROM), puertos de entrada y salida y periféricos.
Estas partes están interconectadas dentro del micro-controlador, y en
conjunto forman lo que se le conoce como microcomputadora. Se puede
decir con toda propiedad que un micro-controlador es una
microcomputadora completa encapsulada en un circuito integrado.
(Electrónica estudio, 2014)
Un micro-controlador dispone normalmente de los siguientes
componentes:
Procesador o UCP (Unidad Central de Proceso).
Memoria RAM para Contener los datos.
Memoria para el programa tipo ROM/PROM/EPROM.

El problema 11
Líneas de E/S para comunicarse con el exterior.
Diversos módulos para el control de periféricos (temporizadores,
Puertas Serie y Paralelo, CAD: Conversores Analógico/Digital, CDA:
Conversores Digital/Analógico, etc.).
Generador de impulsos de reloj que sincronizan el funcionamiento de
todo el sistema. (Electrónica estudio, 2014)
1.6.3 EasyVR
EasyVR es un módulo multi-prototipo de reconocimiento de voz
diseñado para añadir capacidades de reconocimientos de voz, versátil,
robusta y económicas para cualquier aplicación.
EasyVR es el prototipo de la segunda generación del módulo VRbot y
se basa en las características y funcionalidad de su predecesor. El módulo
EasyVR se puede utilizar con cualquier host con una interfaz UART
alimentado a 3,3 V - 5V, tales como PIC y placas Arduino. (Silicio.MX,
2015 )
FIGURA Nº 5
MÓDULO EASYVR ENCARGADO DE RECONOCER EL COMANDO DE
VOZ.
Fuente: http://silicio.mx/easyvr-modulo-multi-proposito-de-reconocimiento-de-voz Elaborado por: Peña Vera Cristhian Geovanny (Silicio.MX, 2015 )

El problema 12
1.6.3.1 Características
Esta placa es la nueva versión 3.0 de reconocimiento de voz para
Arduino.
Dispone de conectores adicionales para micrófono.
Salida de altavoz, línea de audio con Jack y acceso a los pines I/O
del módulo EasyVR.
También dispone de un LED programable para mostrar indicaciones
durante el proceso de reconocimiento de voz para y así poderlo
Configurar.
El módulo puede ser utilizado con cualquier host con una interfaz
UART. (alimentado3.3V-5V).
1.6.3.2 Aplicaciones
Hay diferentes aplicaciones de reconocimientos de EasyVR.
A continuación hablaremos de algunas de ellas:
Sistemas de control gobernados por medio de voz.
Control de acceso de voz.
Sistemas robóticos controlados por voz.
Es utilizada para la configuración de los comandos para el módulo
EasyVR para llevar a cabo su configuración.
El EasyVR debe estar conectado a la PC a través de la Arduino o
utilizando una placa adaptadora.
En el software, el usuario puede definir un nuevo disparo, grupos de
comandos, los sonidos y las contraseñas. Basado en el discurso grabado
es posible generar cualquier acción como encender un comando.

El problema 13
En el software, el usuario debe definir un nuevo comando, grupos de
comandos, los sonidos y las contraseñas. Basado en el comando grabado
es posible generar cualquier acción como encender una salida. (Silicio.MX,
2015 )
1.6.4 Arduino
Arduino es una plataforma de prototipos electrónica de código abierto
(open-source) basada en hardware y software flexibles y fáciles de usar.
Arduino puede sentir el entorno mediante la recepción de entradas desde
una variedad de sensores y puede afectar a su alrededor mediante el
control de luces, motores y otros artefactos.
El micro-controlador de la placa se programa usando el Arduino
Programming Lenguaje (basado en Wiring) y el Arduino Development
Environment (basado en Processing).
Los proyectos de Arduino pueden ser autónomos o se pueden
comunicar con software en ejecución en un ordenador (por ejemplo con
Flash, Processing, MaxMSP, etc.).
Las placas se pueden ensamblar a mano o encargarlas pre
ensambladas; el software se puede descargar gratuitamente. Los diseños
de referencia del hardware (archivos CAD) están disponibles bajo licencia
open-source, por lo que eres libre de adaptarlas a tus necesidades.
Arduino recibió una mención honoríca en la sección Digital Communities
del Ars Electrónica Prix en 2006. (Arduino + -, 2015)
1.6.4.1 ¿Cómo funciona Arduino?
El Arduino es una placa basada en un micro-controlador,
específicamente un ATMEL. Un micro-controlador es un circuito integrado
(podríamos hablar de un microchip) en el cual se pueden grabar
instrucciones. Estas instrucciones se escriben utilizando un lenguaje de

El problema 14
programación que permite al usuario crear programas que interactúan con
circuitos electrónicos.
Normalmente un micro-controlador posee entradas y salidas digitales,
entradas y salidas analógicas y entradas y salidas para protocolos de
comunicación.
Un Arduino es una placa que cuenta con todos los elementos
necesarios para conectar periféricos a las entradas y salidas del micro-
controlador. Se trata de una placa impresa con todos los componentes
necesarios para el funcionamiento del micro y su comunicación con una
computadora a través de comunicación serial.
La comunicación serial es un protocolo de comunicación que alguna
vez fue muy utilizado a través de los puertos serie que traían las
computadoras de antaño.
Arduino utiliza un convertidor de Serial a USB, por lo cual a la hora de
conectarlo a una computadora simplemente utilizamos una conexión USB
común y corriente. La computadora, sin embargo, verá nuestro Arduino
como un dispositivo conectado al Puerto Serie.
Existen diferentes modelos de Arduino, con múltiples características
en cuanto a tamaño, formas, funciones y precios. (Arduino + -, 2015)

El problema 15
FIGURA Nº6
PLACAS DE ARDUINO
Fuente: http://dfists.ua.es/~jpomares/arduino/page_02.htm Elaborado por: Peña Vera Cristhian Geovanny
1.6.4.2 Características generales de la placa
Se trata de unas placas open hardware por lo que su diseño es de
libre distribución y utilización, que incluso podemos construirnos nosotros
mismos.
El programa se implementará haciendo uso del entorno de
programación propio de Arduino y se transferirá empleando un cable USB.
Si bien en el caso de la placa USB no es preciso utilizar una fuente de
alimentación externa, ya que el propio cable USB la proporciona, para la
realización de algunos de los experimentos prácticos sí que será necesario
disponer de una fuente de alimentación externa ya que la alimentación
proporcionada por el USB puede no ser suficiente. El voltaje de la fuente
puede estar entre 6 y 25 Voltios. (Manualdeprogramaciondearduino)

El problema 16
FIGURA Nº7
PLACA DE ARDUINO CON SUS DIFERENTES CARACTERÍSTICAS Y
ELEMENTOS.
Fuente: http://definicionyque.es/arduino/ Elaborado por: Peña Vera Cristhian Geovanny (DefinicionyQue.ES, 2014)
1.6.4.3 ¿Por qué usar Arduino?
Hay muchos micro-controladores y plataformas micro-controladoras
disponibles para computación física. Parallax Basic Stamp, Netmedia’s BX-
24, Phidgets, MIT’s Handyboard, y muchas otras ofertas de funcionalidad
similar. Todas estas herramientas toman los desordenados detalles de la
programación de micro-controlador y la encierran en un paquete fácil de
usar.
Arduino también simplifica el proceso de trabajo con micro-
controladores, pero ofrece algunas ventajas para profesores, estudiantes y
aficionados interesados sobre otros sistemas:
A.- Barato:
Las placas Arduino son relativamente baratas comparadas con otras
plataformas micro-controladoras. La versión menos cara del módulo
Arduino puede ser ensamblada a mano, e incluso los módulos de Arduino
pre-ensamblados cuestan menos de 50$. (Arduino + -, 2015)

El problema 17
B.- Multiplataforma:
El software de Arduino se ejecuta en sistemas operativos Windows,
Macintosh OSX y GNU/Linux. La mayoría de los sistemas micro-
controladores están limitados a Windows. (Arduino + -, 2015)
C.- Entorno de programación simple y clara:
El entorno de programación de Arduino es fácil de usar para
principiantes, pero sucientemente flexible para que usuarios avanzados
puedan aprovecharlo también. Para profesores, está convenientemente
basado en el entorno de programación Processing, de manera que
estudiantes aprendiendo a programar en ese entorno estarán
familiarizados con el aspecto y la imagen de Arduino. (Arduino + -, 2015)
D.- Código abierto y software extensible:
El software Arduino está publicado como herramientas de código
abierto, disponible para extensión por programadores experimentados. El
lenguaje puede ser expandido mediante librerías C++, y la gente que quiera
entender los detalles técnicos pueden hacer el salto desde Arduino a la
programación en lenguaje AVR C en el cual está basado. De forma similar,
puedes añadir código AVR-C directamente en tus programas Arduino si
quieres. (Arduino + -, 2015)
E.- Código abierto y hardware extensible:
El Arduino está basado en micro-controladores ATMEGA8 y
ATMEGA168 de Atmel.
Los planos para los módulos están publicados bajo licencia Creativa
Commons, por lo que diseñadores experimentados de circuitos pueden
hacer su propia versión del módulo, extendiéndolo y mejorándolo. Incluso

El problema 18
usuarios relativamente inexpertos pueden construir la versión de la placa
del módulo para entender cómo funciona y ahorrar dinero. (Arduino + -,
2015)
1.6.4.4 Tabla: Características de las distintas AVR con su respectivo
micro-controlador.
La tabla comparativa de las características que puede tener cada una
de las distintas AVR con su respectivo micro-controlador, y para que se den
una idea de que tan amigables son para sus proyectos. Además de que
prácticamente casi todas las placas trabajan bajo el mismo rango de
alimentación (a excepción de la Lilipad, que cuenta con características y
usos un poco distintos de los demás) podemos encontrar una velocidad de
procesamiento buena, así como una memoria que se presta muy bien para
desempolvar esos servos demás dispositivos electrónicos listos para
usarse en algo más que entretenido. (VB-mundo)
TABLA Nº1
DIFERENTES AVR CON SUS CARACTERÍSTICAS Y SUS
RESPECTIVOS MICROCONTROLADORES.
Fuente: http://www.vb-mundo.com/comparacion-de-diferentes-avr-de-arduino/ Elaborado por: Peña Vera Cristhian Geovanny (VB-mundo)

El problema 19
1.6.5 Fundamentación legal
El marco legal que ampara el trabajo es básicamente la Ley Orgánica
de Discapacidades, junto con la Constitución de la República del Ecuador,
que estipula que ningún ecuatoriano será excluido bajo ninguna condición,
existe un trato no discriminatorio en dicho margo legal. (ANEXO N° 1).

CAPÍTULO II
METODOLOGÍA
En este capítulo se muestra el diseño tanto de hardware y software
mediante diagramas circulares, simulaciones y diagramas de flujo como se
indica en la figura N° 8.
Donde se describe mediante un diagrama las conexiones de todo el
sistema automatizado, los componentes que se utilizará para el proyecto
del sistema automatizado.
-Utilizando el EasyVR con su respectivo software de configuración,
conectado al Arduino mega y el software de configuración luego viene la
conexión del módulo de relés para luego ya conectar los motores que dan
la fuerza para el movimiento.
Se analizó las distintas formas de realizar el reconocimiento de voz
tales como en androide, una computadora y el módulo EasyVR.
Para la implementación del proyecto con el costo más bajo y que funcione
de la mejor manera para el usuario final, en este caso son personas con
capacidades especiales y problemas de movimientos.

Metodología 21
FIGURA N° 8
EL INTERFAZ DE CONTROL DIVIDIDO EN 4 FASES UTILIZANDO
UN RECONOCIMIENTO DE VOZ.
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny 2.1 Diseño de un sistema electrónico dirigido por comando de
Voz para la automatización de una cama.
2.2 Reconocimiento de voz y sus diferentes formas de
Funcionamiento.
Lo que se analiza es que se puede realizar el reconocimiento de voz
mediante: módulo EasyVR, Androide y computador.
El módulo EasyVR es un potente sistema de reconocimiento de voz,
el mismo que se comunica vía serie, su costo en el mercado es
relativamente accesible, una desventaja es que tiene una capacidad de
memoria limitada a 32 comandos programables. (U. Israel, 2015)

Metodología 22
El sistema Androide: para este método se necesitaría una
programación para ejecutar el reconocimiento de voz, y sería necesario una
conexión a internet, además que a parte del costo del equipo Android se
agregaría un costo adicional al sistema, otra desventaja es que la persona
cada vez que quiera utilizar el sistema de reconocimiento de voz tendría
que iniciar el sistema Androide, además de presionar un botón lo cual si es
una persona con discapacidad de movimientos no podrá hacerlo. (U. Israel,
2015)
Computador: En el caso del computador ya sea de escritorio o laptop,
el costo del proyecto se elevaría, el consumo de energía eléctrica
aumentaría y sobre todo el software para el diseño de este tipo de
programas es más costoso, Por estas circunstancias después del estudio
previo de las diferentes maneras en las que se puede realizar el
reconocimiento de voz, se optó por el módulo EasyVR que viene montado
a un shield que se conecta directo al módulo Arduino mega.
2.3 Limitaciones.
El reconocimiento de voz es, sin duda, una tecnología, que promete
cambiar la forma en cómo interactuamos con las computadoras, sin
embargo, la tecnología aún no ha entrado en la etapa de ser una
herramienta que pueda ser usada de forma dinámica por la gente. Todavía
falta un poco de tiempo para que esta sustituya al teclado y al ratón, o al
menos, para que modifique las prácticas de computación.
El reconocimiento de voz todavía tiene muchos defectos y
limitaciones. Estas limitaciones se basan en las deficiencias de la
inteligencia artificial.
En las computadoras, le es difícil procesar múltiples frases y
reconocer los comandos fácilmente. La mayoría de software de

Metodología 23
reconocimiento de voz tiene que ser configurado para funcionar
correctamente, este debe adecuarse a su tono de voz, para que pueda
reconocer las órdenes y comandos que se le dicta.
Sin embargo, se espera que en un futuro el software de
reconocimiento de voz, sea una parte integral de las computadoras, no
sólo en las industrias, sino también dentro de sus hogares. (directory M,
2015).
Existen dos tipos para reconocer el habla:
Reconocimiento dependiente: reconoce el habla de una sola
persona.
Reconocimiento independiente: es un sistema que reconoce el
habla de diferentes personas.
Este es el sistema tecnológico más importante que se va a utilizar
para este prototipo, el sistema de reconocimiento de voz será la principal
herramienta a utilizar para que el sistema automatizado por el Arduino
EasyVR pueda generar la traducción con normalidad. (peña, 2017).
2.4 Módulo EasyVR
Cuando se usa el módulo EasyVR hay que comprender las diferentes
herramientas que se ponen a disposición.
El módulo EasyVR tiene la capacidad de reconocer comandos de
voz (por medio de un micrófono). Si Alguien dice una palabra ya
configurada con los programas adecuados, puede ser que ejecute una
orden o una acción por medio de la voz, También hay la posibilidad que
esta responda creando una interacción entre el usuario y la tarjeta,

Metodología 24
usando una bocina de 8 ohm que se conecta en dos de sus terminales,
también tiene un puerto para audífonos 3.5 mm, si en el momento no tienes
la bocina o por si tu diseño así lo requiere.
Cuando se hace el reconocimiento de voz se utiliza una tarjeta
compatible con Arduino para ejecutar el programa.
Cuando se usa sonidos de respuesta de la tarjeta (que la tarjeta hable
y responda) no se usará el Arduino IDE directamente ya que se usa dos
programas llamados Easy Commander y QuickSythesis.
Básicamente esas son las funciones principales y aunque parece muy
simple es un arma poderosa a la imaginación de proyectos con
reconocimiento de voz.
El EasyVR es un módulo que viene con siete idiomas como lo es el
español, japonés, francés, inglés y alemán, este módulo entiende varios
idiomas; ya que tiene ciertas palabras y ciertos comandos de voz incluidos
dentro del firmware para el uso de los usuarios.
El primer puerto que se va a utilizar son los del J3, es el pin donde
se va a conectar el micrófono, y el puerto J1 es donde se va a realizar la
comunicación serie con el Arduino que se compone con pines de
transmisión, recepción y también con los de alimentación que son Vcc y
GND que serán conectados a través del shield. (EasyVR, 2014)
2.5 Conexiones
Se incorpora el módulo EasyVr al Arduino, y se conecta el cable de
alimentación, esto le dará energía a toda la tarjeta. Para cargar y utilizar
las diferentes opciones tenemos una parte de la tarjeta donde están

Metodología 25
cuatro terminales, mediante un jumper se observa que cada una de estas
tienen el nombre de UP, PC, HW Y SW, HW.
(RobotyPic, 2015)
2.5.1 Conexión up-
Se lo usa cuando se necesite cargar tablas de sonido, se desconecta
la tarjeta y se cambia el jumper a UP y cuando se encienda quedara una
led rojo, esto indicara que ya está conectado, este modo solo se usa para
cargar tablas de sonido. (RobotyPic, 2015)
2.5.2 Conexión pc-
Es utilizado para conectar la tarjeta al Easy Comander y al Arduino
IDE, este método se lo utiliza para cargar el programa al Arduino, también
para establecer los comandos de voz, sin este, el programa no detecta la
tarjeta.
SW y HW- se usará para dejar funcionando la tarjeta, se carga el
programa, se carga la tabla de sonido y cuando se quiere ver el resultado
se usara el modo SW para todos, el HW lo dejaremos aparte. (RobotyPic,
2015)
Metodología 26
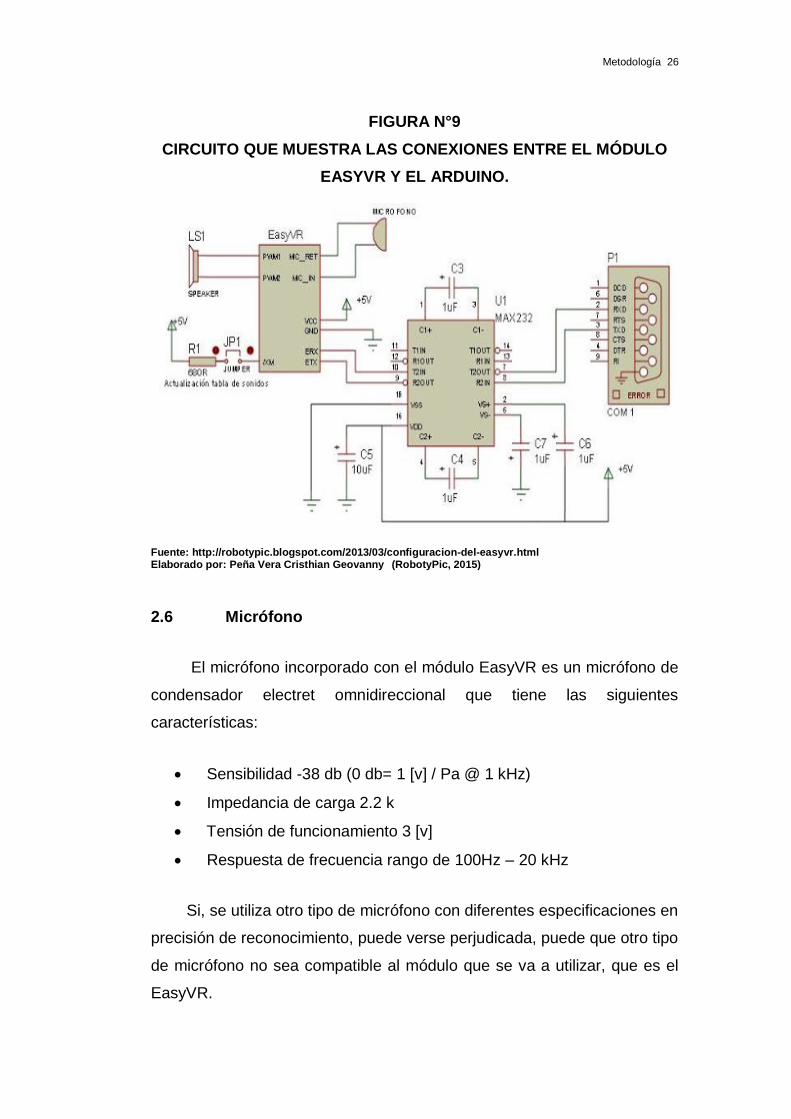
FIGURA N°9
CIRCUITO QUE MUESTRA LAS CONEXIONES ENTRE EL MÓDULO
EASYVR Y EL ARDUINO.
Fuente: http://robotypic.blogspot.com/2013/03/configuracion-del-easyvr.html Elaborado por: Peña Vera Cristhian Geovanny (RobotyPic, 2015)
2.6 Micrófono
El micrófono incorporado con el módulo EasyVR es un micrófono de
condensador electret omnidireccional que tiene las siguientes
características:
Sensibilidad -38 db (0 db= 1 [v] / Pa @ 1 kHz)
Impedancia de carga 2.2 k
Tensión de funcionamiento 3 [v]
Respuesta de frecuencia rango de 100Hz – 20 kHz
Si, se utiliza otro tipo de micrófono con diferentes especificaciones en
precisión de reconocimiento, puede verse perjudicada, puede que otro tipo
de micrófono no sea compatible al módulo que se va a utilizar, que es el
EasyVR.

Metodología 27
Para emitir los comandos vocales se tiene que tener una distancia optima
de 60 cm desde el micrófono, se puede tratar a mayor distancia si se habla
más fuerte.
2.7 Salida de audio
El módulo EasyVR es capaz de activar directamente un altavoz de 8
ohmios. Esta interfaz también tiene la posibilidad de conectar a un
amplificador de audio externo para conducir altavoces de menor
impedancia.
La conexión de altavoces con baja impedancia al módulo puede dañar
permanentemente la salida del audio EasyVR o todo el módulo.
2.8 Comandos de voz
En la programación de los comando de voz se eligió voces
predefinidas que vienen grabadas en el firmware y no se puede modificar,
estos son los diferentes idiomas que vienen integrados: italiano, inglés,
japonés, alemán, francés y español, están se encuentran almacenada en
los grupos denominados Word set 1, Word set 2, Word set 3, y trigger. Para
ser visualizado es necesario seleccionar en el área de grupos, y utilizar el
grupo que necesitas.
En la siguiente figura se muestra la lista de todos los comandos para
cada idioma soportado, junto con el índice de grupo (trigger o el Word set),
el índice de comando (comand índex) y un identificador de idioma que se
encuentra en el número superior de la tabla, es el que ayuda a seleccionar
el idioma del módulo EasyVR, la numeración en la tabla es usada para la
programación y se usa como protocolo de comunicación.
Para seleccionar una palabra en cualquier de los idiomas del EasyVR
se debe direccionar el Word set y el comand índex con estos datos a través

Metodología 28
de comandos preestablecidos se comunica el módulo Arduino con el
módulo EasyVR.
En primer lugar se configura el idioma y después se llama al Word set
que normalmente se lo encuentra en la primera columna y luego el comand
índex que se ubica en la segunda columna, después se pone un tiempo
espera para que reconozca el comando, y por ultimo lo valida, si es un
comando similar se graba en una variable para que sea comparada y
guardada para que posteriormente realice una acción.
TABLA N°2
TABLA QUE ENSEÑA LOS COMANDOS PREDEFINIDIAS EN
DIFERENTES IDIOMAS
Fuente: http://tdrobotica.co/shield-easyvr-reconocimiento-de-voz/38.html Elaborado: Peña Vera Cristhian Geovanny

Metodología 29
2.9 Cargar la tabla de sonido
En el sistema del EasyVR se puede producir sonidos guardados en
su memoria interna. El sonido BEEP predefinido esta siempre disponible,
más aún si no hay sonidos guardados en el módulo. Los sonidos que
están personalizados se encuentran organizados en una tabla
llamada“TABLA DE SONIDOS” que los usuarios puedes preparar o
construir con la herramienta especial QuickSynthesisTM. (RobotyPic,
2015)
2.9.1 ¿Para qué sirve quicksynthesis?
QuickSynthesis es una herramienta que está diseñada para ayudar a
crear y gestionar síntesis de voz para Voice Extreme ™ y otras
aplicaciones sensoriales de micro-controladores RSC. (Laboratorio de
Robotica, 2015)
2.9.2 Crear una tabla de sonidos brevemente en los siguientes
pasos:
Crear los archivos de sonido que se quiere utilizar para la tabla con
cualquier software grabador y en formato WAV. Por ejemplo Audacity
disponible gratuitamente en su web http://audacity.sourceforge.net/
Abrir QuickSynthesis para crear la tabla en función de los archivos
de sonido elegidos. Con el programa abierto elegimos “Nuevo Proyecto”.
Elegimos la opción RSC4 family.
Se le da un nombre al proyecto y se añade todos los archivos WAV
para que formen parte de la tabla de sonidos. Los seleccionamos todos y
ejecutamos comprimir (Compress). Posteriormente ejecutamos “Built”.
Aparece una nueva ventana en la que dejaremos todas las opciones que
aparecen por defecto. (RobotyPic, 2015)

Metodología 30
Antes de cargar la tabla de sonidos se toma en cuenta que los sonidos
que puede soportar la tarjeta son de formato .WAV 16 bit a 22050hz Canal:
Mono (o Monoaural), En la página de Veear donde descargamos los
software hay un demo llamado EasyVR Access Control Demo, de ahí se
puede sacar los audios que están en el formato admisible por la EasyVR,
otra de las formas que podemos crear estos archivos, es usando Audacity
que es un editor de sonido muy sencillo que te permitirá crear sonido en el
formato correcto. En este ejemplo tomaremos los del demo de Veear.
Ya instalado QuickSynthesis, se lo ejecuta como administrador (muy
importante para que no de errores) (Robodacta, 2015).
FIGURA N°10
Clic en la hoja en blanco para abrir un proyecto nuevo
Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 31
FIGURA N°11
Selecciona ok en RSC4
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
FIGURA N°12
Y SE ASIGNA UN NOMBRE AL PROYECTO
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 32
FIGURA N°13
QUEDARÁ UNA VENTANA PARECIDA A ESTA, SE DA CLIC EN LA
CRUZ VERDE Y SELECCIONA LOS ARCHIVOS DE AUDIO
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
FIGURA N°14
SE DEJA EL VALOR POR DEFAULT, Y SE DA CLIC EN OK FOR ALL
Fuente: investigación directa Elaborado: Peña Vera Cristhian Geovanny

Metodología 33
FIGURA N°15
AUTO LABEL ALL
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
FIGURA N°16
LUEGO QUEDARÁ DE ESTA MANERA, SE BUSCA AL BOTÓN
VERDE QUE DICE BUILT
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 34
FIGURA N°17
SE DA CLIC EN OK
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
FIGURA N°18
CLIC EN OK
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 35
FIGURA N°19
EN ESTA VENTANA APARECERÁ EN ROJO
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
FIGURA N°20
Y CUANDO HAYA TERMINADO QUEDARÁ EN VERDE
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 36
FIGURA N°21
CLIC EN OK
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
Luego de esto se guarda, Presionando la casilla del disquete y se
vuelve a dar clic en build para estar seguro que todo está en orden.
Con este último ya se tiene creado un archivo con todos los sonidos, el
siguiente paso es cargarla a la tarjeta. (Robodacta, 2015)
2.9.3 Creada la tabla de sonidos, ahora hay que añadirla al
módulo.
Para ello, se asegura que no se tiene el módulo bajo tensión. Se lleva
la patilla XM del módulo a la línea de Vcc +5V por mediación de una
resistencia de 680 Ω. De esta forma se obtiene el módulo en modo de
actualización de tabla de sonidos.
Se vuelve a energizar el módulo, incluida la patilla XM que se ha
indicado. Accedemos al EasyVR_Commander y ejecutamos el comando
del menú superior”Update Sound Table”.

Metodología 37
Pedirá buscar la ubicación del archivo del proyecto ya creado con el
QuickSyntesis (extensión .qxp). Elegido, nos aparece una nueva ventana
con la lista de los archivos de la tabla de sonidos. Si indica error, abrimos
el proyecto creado con el QuickSyntesis y volvemos a guardarlo para tener
una versión más actualizada. (RobotyPic, 2015)
FIGURA N°22
CAPTURE DEL MONTAJE DE LA TABLA DE SONIDO
fuente:http://robotypic.blogspot.com/2013/03/configuracion-del-easyvr.html Elaborado por: Peña Vera Cristhian Geovanny (RobotyPic, 2015)
Se lo carga al módulo, Seleccionamos la opción “Slow transfers” y
pulsa “Down load”.
La tabla de sonidos se transfiere al módulo. Todos los sonidos que
había anteriormente en el módulo se eliminan automáticamente a
excepción del predeterminado “Beep”.

Metodología 38
Se vuelve a dejar la patilla XM del módulo al aire desconectada de
Vcc. Se conecta la comunicación del módulo con el PC y accediendo a la
tabla de sonidos se apreciará la nueva tabla de sonidos cargada.
FIGURA N°23
NUEVA TABLA DE SONIDO, CARGADA AL MÓDULO
Fuente: http://robotypic.blogspot.com/2013/03/configuracion-del-easyvr.html Elaborado por: Peña Vera Cristhian Geovanny (RobotyPic, 2015)
Para poder reproducir los sonidos con el EasyVR se debe conectar
un altavoz de 8Ω al módulo. Con el comando “Play Sound” reproduciremos
los sonidos contenidos en la tabla. (RobotyPic, 2015)

Metodología 39
TABLA N°3
TABLA DE COMPRESIÓN DE TIEMPO DISPONIBLE (8KHZ 15%
SILENCIO) TIEMPO DISPONIBLE (9.3 KHZ 15 % SILENCIO).
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
El archivo que tiene el discurso de audio, es una buena alternativa
para la compresión SX-3. Se necesitará mayor calidad al intentar tasas de
compresión más bajas. Hay que estar atento con los archivos de audios ya
que ellas no pueden tener frecuencia muy alta, debe de llegar a menos de
la mitad de la frecuencia de muestreo.
FIGURA N°24
MUESTREO DE COMPRESIÓN Y DE FRECUENCIA DEL SENSORY QUICKSYNTHESIS
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 40
2.10 Los módulos de 8 relés
Módulo de relevadores (relés) para conmutación de cargas de
potencia. Los contactos de los relevadores están diseñados para conmutar
cargas de hasta 10 A y 250VAC (30VDC), aunque se recomienda dejar un
margen hacia abajo de estos límites. Las entradas de control se encuentran
aisladas con opto acopladores para minimizar el ruido percibido por el
circuito de control mientras se realiza la conmutación de la carga. La señal
de control puede provenir de cualquier circuito de control TTL o CMOS
como un micro-controlador. (Geek factory, 2015)
FIGURA N°25
PLACA DE UN MÓDULO DE 8 RELÉS PARA LA CONMUTACIÓN DE
CARGAS DE POTENCIA.
Fuente: (htt)torg2010.blogspot.com/ Elaborado por: Peña Vera Cristhian Geovanny
2.10.1 Características:
8 canales independientes protegidos con opto acopladores
8 Relevadores (Relays) de 1 polo 2 tiros
El voltaje de la bobina del relé es de 5 VDC
Led indicador para cada canal (enciende cuando la bobina del relé
esta activa)
Activado mediante corriente: el circuito de control debe proveer una
corriente de 15 a 20 mA
Puede controlado directamente por circuito lógicos

Metodología 41
Terminales de conexión de tornillo
Terminales de entrada de señal lógica con headers macho de 0.1″
(Geek factory, 2015)
FIGURA N°26
CONEXIONES DEL MÓDULO DE 8 RELÉS CON EL MÓDULO
DE ARDUINO
Fuente: https://forum.arduino.cc/index.php?topic=168930.0 Elaborado por: Peña Vera Cristhian Geovanny (Arduino + -, 2015)
Los módulos de relés normalmente tienen dos filas de pines: en el
jumper que tiene tres pines y se puede seleccionar: alimentar el modulo, o
alimentar de forma automatizada los opto-acopladores como relés siempre
y cuando se quite el jumper.
Se eligió usar la forma de alimentar todo de manera unida, ya que
es la manera más sencilla de hacerlo, así que se ha dejado el jumper

Metodología 42
unido Jd-Vcc y Vcc. En la segunda fila de pines su presentación está en el
siguiente orden: IN1 IN2 IN3 IN4 IN5 IN6 IN7 IN8 VCC GND, es donde se
une la alimentación del Arduino; es decir; GND del módulo con el GND del
Arduino, VCC del módulo con 5 voltios del Arduino y las entradas IN1 a
IN8 se activan las bobinas de los relés cuando se conecta a GND de 0
voltios a las entradas.
Se activan los pines que es necesario en el Arduino y estos se
encargarán de activar las bobinas de los relés correspondientes. Esta es
la manera más fácil de implementar relés en el proyecto sin la necesidad
de construir una PC. (Arduino + -, 2015)
2.11 Interfaz de control mediante reconocimiento de voz con el
programa del micro-controlador para que pueda cumplir el
movimiento de la cama.
Este sistema se lo representa con un diagrama de bloque que será
visualizado en la siguiente figura, donde el sistema incorpora un interfaz
de control utilizando el reconocimiento de voz que se divide en cuatro
fases; la primera fase corresponde a la utilización del micrófono, siguiendo
a la segunda fase de divide en dos partes: la primera parte usa un
vocabulario pequeño que constituye un modelo; la segunda parte
corresponde a una sección que es el reconocimiento de voz que así lo
requiere este tipo de modelo.
La fuente de alimentación de voltaje que alimenta a todo el sistema
sobre todo al micro-controlador para que procese todas las señales. Fase
tres y cuatro están los relés que están destinados a procesar las señales
del micro-controlador del Arduino para que active los relés, el mismo que
activaran los motores de la cama. Este proceso se aplicara mediante
comandos de voz y se diseñara para beneficiar a pacientes que tengan que
realizar algún tipo de movimiento usando la cama sin la necesidad de ayuda

Metodología 43
2.12 Sistema de alimentación de los circuitos.
En este tipo de sistema la alimentación es de 120 voltios, este voltaje
lo transformas mediante un adaptador de 9 voltios y de 1 amperios, ese es
el rango para conectar el Arduino; el Arduino tiene un reguladores de voltaje
que convierte el voltaje de este adaptador. También se puede conectar por
puerto USB 5 voltios o una fuente externa de 6 a 20 voltios.
Si la tensión de entrada es menor de 7 voltios, el pin de 5 voltios
puede almacenar menos de 5 voltios y la placa puede resultar inestable.
De la misma manera si el voltaje es mayor que 12 el regulador comenzara
a recalentarse y es posible que se dañe la placa. En el siguiente punto
explicaremos los pines que están designados para la alimentación.
Vin: este pin se lo utiliza como entrada de alimentación del Arduino
Mega cuando se tiene una fuente de alimentación externa.
5[v]: la fuente de alimentación regulada por micro-controlador y
demás componentes del Arduino. Se puede ingresar un VIN a través del
controlador incorporado o la conexión USB o de otro voltaje regulado de
5[V.]
GND: este es el pin que alimenta a tierra.
3V3: una fuente de 3.3 [v] generada por el regulador interno que
contiene la placa; la corriente máxima admitida es de 50 [Am]. (Panama
Hitek, 2014)

Metodología 44
FIGURA N°27
EXPLICA LOS PINES DE ALIMENTACIÓN DE LOS MÓDULOS.
Fuente: http://www.prometec.net/consumos-arduino/ Elaborado por: Peña Vera Cristhian Geovanny (prometec.com, 2015)
2.13 Arduino
La programación del Arduino mega es mediante una interfaz llamada
Arduino UI. El ATmega2560 en el Arduino mega tiene un gestor de
arranque pregrabado lo cual le permite enviar un código sin la necesidad
de un hardware externo, este se comunica mediante el protocolo STK500.
2.13.1 Configuración
Luego de la comunicación que estable el Arduino mediante el USB y
la PC, el Arduino UI debe estar configurado para el puerto COM correcto
(Herramienta Serial Port). Después de esta configuración se debe
seleccionar el modelo utilizando (Herramientas Board).
2.13.2 Programación
La programación del Arduino se la realiza mediante su propia interfaz,
también cuenta con algunas funciones específicas para el manejo de los
puertos de entrada y salida y la configuración de Hardware en general.

Metodología 45
También contiene variedad de bibliotecas adicionales para su
funcionalidad como es el software Serial, Ethernet, EEPROM entre otros.
El lenguaje de programación para este sistema es el lenguaje C / C++;
la manera en que se recibirán los comandos de voz se podrá ver a
continuación mediante un diagrama de flujo que con un tiempo de 2
segundos tiene como referencia para enviar un comando, si no se realiza
en el tiempo determinado se regresara a la parte inicial, hasta recibir un
comando que lleve a una subrutina o que realice una acción.
FIGURA N°28
DIAGRAMA DE FLUJO QUE MUESTRA EL TRABAJO DE LOS
COMANDO EN UN TIEMPO DE 2 SEGUNDOS
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Metodología 46
2.13.3 Hardware que utiliza el Arduino para su conectividad
El Arduino mega es conectado por el USB a la PC. Para que esto se
cumpla se necesita instalar un controlador Serial-USB para que la conexión
se realiza correctamente.
El Arduino está conectado con el ETX y ERX EasyVR Pin 12 (RX) y
Pin 12 ( TX definido por el propio programa Arduino mega); los pines VCC
y GND que alimentan al EasyVR provienen de las salidas de alimentación
que tiene el Arduino mega de 5Voltios y GND.
El micrófono debe ser incorporado en el conector del EasyVR J3.
2.13.4 Diagrama de instalaciones del Arduino mega y sus
conexiones de control y sistema eléctrico.
En esta parte se puede visualizar que la bobina de los relés son
activadas mediante señales de 7 puertos digitales, los cuales activan los
diferentes servomotores, dependiendo que la señal de salida del Arduino
estén bajo.

Metodología 47
FIGURA N°29
CIRCUITO DE LAS CONEXIONES ELÉCTRICAS Y DE CONTROL DEL
ARDUINO MEGA.
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
2.13.5 Comunicación entre el módulo Arduino y software del
EasyVR
Para la comunicación entre el módulo Arduino y el software EasyVR
GUI se debe agrupar el código en Arduino UI. La comunicación se realizara
como comando de voz; para llamar a los comandos se deberá utilizar un
protocolo que está establecido mediante líneas de programación, lo cual
para cada comando seleccionado se deberá utilizar el índice que
corresponde.
El command group enviara un valor que el módulo EasyVR volverá a
Arduino y así se verificara que el comando hablado es igual al comando
registrado.

Metodología 48
TABLA N°4
GRUPOS DE COMANDOS PARA LA COMUNICACIÓN ENTRE EL
ARDUINO Y EL EASYVR MEDIANTE SUS PROTOCOLOS Y LÍNEAS
DE PROGRAMACIÓN.
Fuente: investigación directa Elaborado por: cristhian peña vera
Se utilizó los comando pre-definidos para que los usuarios que hablen
español lo puedan utilizar, en caso de utilizarse los comandos de voz
programados, estos solo podrían ser usado por la persona que hizo la
grabación.
Este tipo de comando se asignó para que las personas con
discapacidad de movimiento puedan utilizar la cama de la manera más
sencilla y segura.
Metodología 49
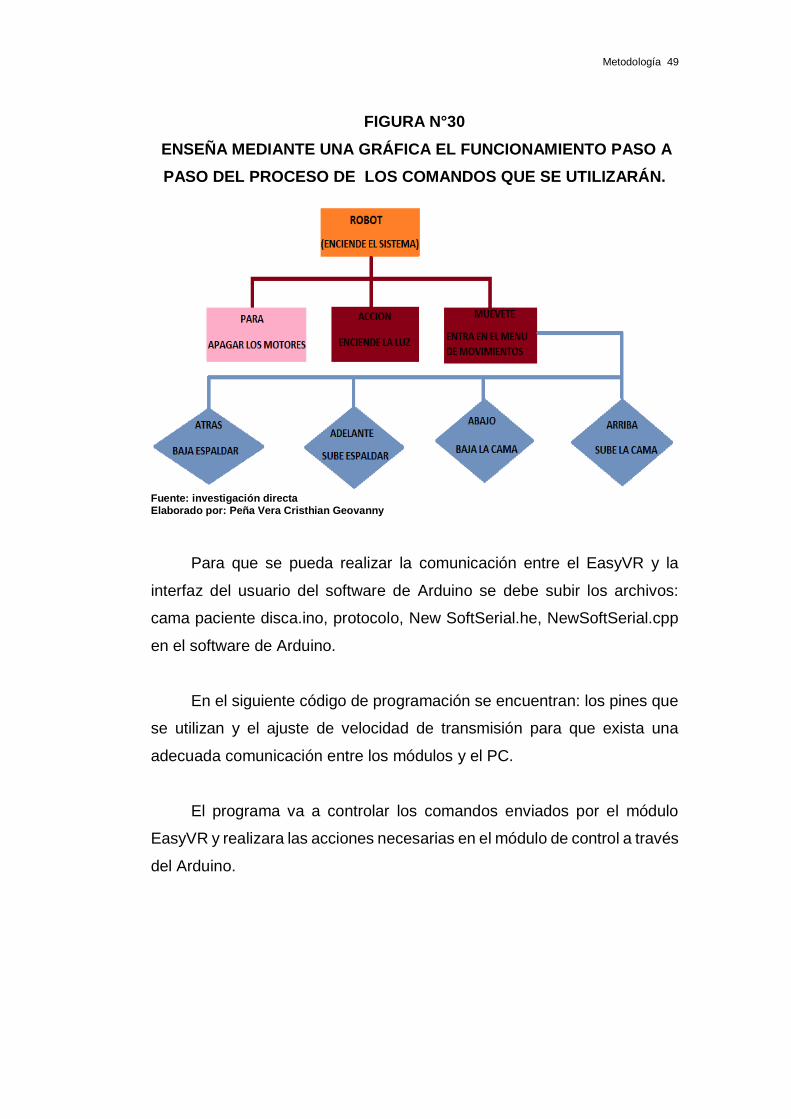
FIGURA N°30
ENSEÑA MEDIANTE UNA GRÁFICA EL FUNCIONAMIENTO PASO A
PASO DEL PROCESO DE LOS COMANDOS QUE SE UTILIZARÁN.
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
Para que se pueda realizar la comunicación entre el EasyVR y la
interfaz del usuario del software de Arduino se debe subir los archivos:
cama paciente disca.ino, protocolo, New SoftSerial.he, NewSoftSerial.cpp
en el software de Arduino.
En el siguiente código de programación se encuentran: los pines que
se utilizan y el ajuste de velocidad de transmisión para que exista una
adecuada comunicación entre los módulos y el PC.
El programa va a controlar los comandos enviados por el módulo
EasyVR y realizara las acciones necesarias en el módulo de control a través
del Arduino.

Metodología 50
FIGURA N°31
MUESTRA EL FUNCIONAMIENTO COMPLETO DEL PROYECTO DE
RECONOCIMIENTO DE VOZ.
Fuente: investigación directa
Elaborado por: Peña Vera Cristhian Geovanny

CAPÍTULO III
ANÁLISIS E INTERPRETACIÓN DE LOS RESULTADOS
3.1 Implementación del prototipo automatizado encargado de
funcionar mediante comandos de voz para movilizar a las
personas con capacidades especiales y problemas de
movimientos.
3.1.1 Conexión entre el micrófono y el EasyVR
En esta conexión el micrófono se conecta en el pin o puerto J3.
FIGURA N°32
PLACA DEL EASYVR CONECTADO CON EL
MICRÓFONO
Fuente: http://diymakers.es/wall-e/ Elaborado por: Peña Vera Cristhian Geovanny (DIYMAKERS, 2015)
Análisis e interpretación de resultados 52
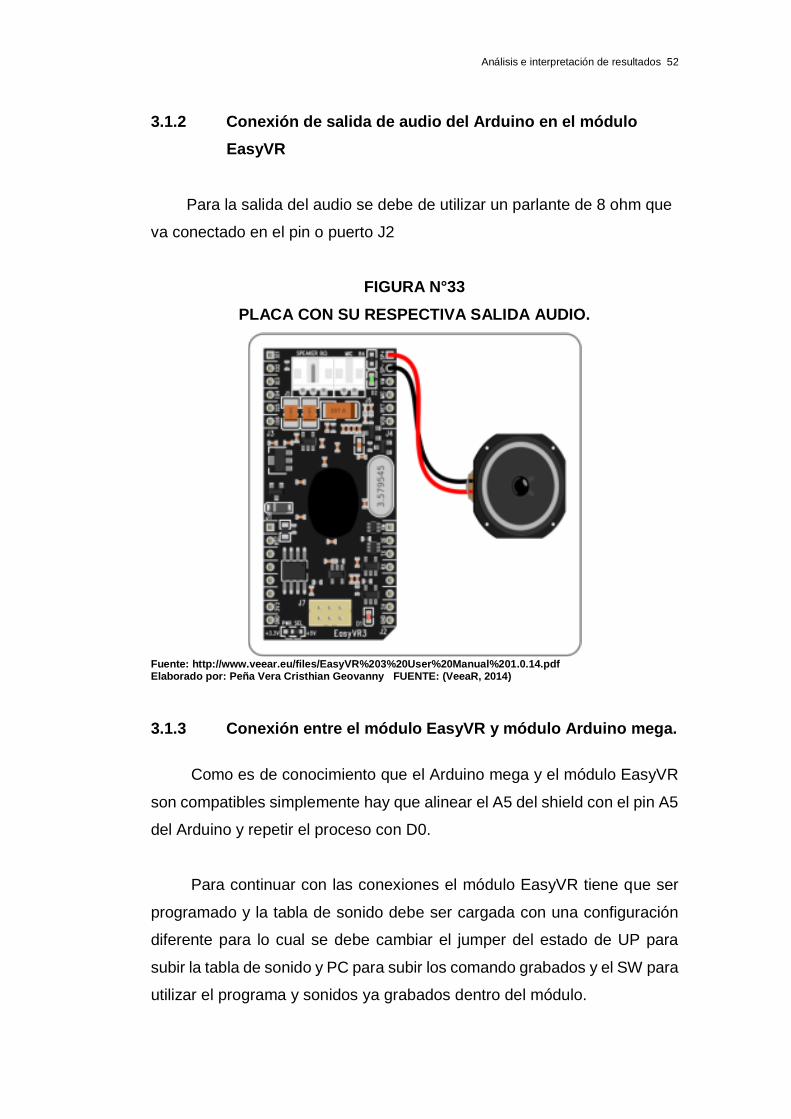
3.1.2 Conexión de salida de audio del Arduino en el módulo
EasyVR Para la salida del audio se debe de utilizar un parlante de 8 ohm que
va conectado en el pin o puerto J2
FIGURA N°33
PLACA CON SU RESPECTIVA SALIDA AUDIO.
Fuente: http://www.veear.eu/files/EasyVR%203%20User%20Manual%201.0.14.pdf Elaborado por: Peña Vera Cristhian Geovanny FUENTE: (VeeaR, 2014)
3.1.3 Conexión entre el módulo EasyVR y módulo Arduino mega.
Como es de conocimiento que el Arduino mega y el módulo EasyVR
son compatibles simplemente hay que alinear el A5 del shield con el pin A5
del Arduino y repetir el proceso con D0.
Para continuar con las conexiones el módulo EasyVR tiene que ser
programado y la tabla de sonido debe ser cargada con una configuración
diferente para lo cual se debe cambiar el jumper del estado de UP para
subir la tabla de sonido y PC para subir los comando grabados y el SW para
utilizar el programa y sonidos ya grabados dentro del módulo.

Análisis e interpretación de resultados 53
FIGURA N°34
ENSAMBLAJE DEL ARDUINO Y EL MÓDULO EASYVR CON SUS
CONEXIONES
Fuente: http://4imedio.blogspot.com/2013/03/tabla-de-sonidos-easyvr-desde-cero.html Elaborado por: Peña Vera Cristhian Geovanny (Rdz, 2014)
3.1.4 Montaje y conexiones del módulo de 8 relés
Para esta conexión se conecta los pines de salida digitales del
Arduino mega a los pines de entrada del módulo de relés.
FIGURA N°35
MONTAJE DEL MÓDULO DE RELÉS CON EL ARDUINO
Fuente: http://www.prometec.net/consumos-arduino/ Elaborado por: Peña Vera Cristhian Geovanny (prometec.com, 2015)

Análisis e interpretación de resultados 54
En el montaje del módulo de 8 relés y de todos los elementos
electrónicos de reconocimiento de control y fuerza se los instaló en una
consola de metálico sobre una base de plástico para mayor seguridad del
usuario.
FIGURA N°36
MUESTRA LA CONSOLA DE PLASTICO QUE SE UTILIZARÁ PARA
EL PROYECTO.
Fuente: http://jmloureiro77.blogspot.com/2014_08_01_archive.html Elaborado por: Peña Vera Cristhian Geovanny (JMloreiro77, 2014)
3.1.5 Ensamblaje del software
El ensamblado del software se lo realiza en el mismo Arduino que se
interconecta con el módulo EasyVR para la transmisión y recepción de
datos vía serie.
La programación se la hizo sobre Arduino, se incorporó las
bibliotecas del módulo EasyVR para que se comunique con el módulo
Arduino, los comandos que se utilizan en los programas, son los mismos
comandos ya establecidos o grabados en las bibliotecas del módulo
EasyVR.
La programación que se realizó es del mismo Arduino, la llamada de
los comandos se empleó a través de protocolos ya establecidos por el
EasyVR

Análisis e interpretación de resultados 55
3.1.6 Sistematización software
Así como se muestra en los diagramas de flujo de las figura n°16 y la
figura n°19 se realizó a la programación del Arduino, teniendo algunas
variables y condiciones para el buen funcionamiento del programa.
Dentro del programa también se realizó la comunicación serie con el
EasyVR ya que esta tiene su propia librería interna de comandos, que con
anterioridad a la programación ya fueron subidos; en la figura n°26 se
puede observar una captura del proceso de programación.
FIGURA N°37
CAPTURE DEL PROCESO DE PROGRAMACIÓN DEL ARDUINO.
Fuente: investigacion directa Elaborado por: Peña Vera Cristhian Vera

Análisis e interpretación de resultados 56
3.1.7 Tabla de sonido
La tabla fue implementada mediante archivos generados por
balabolka que es un sintetizador de voz que permite generar archivos de
audio WAV a través del texto.
TABLA N°5
SE MUESTRA LOS SONIDOS GENERADOS Y SUBIDOS AL MÓDULO EASYVR
NUMEROS DE SONIDO
ACCION QUE REALIZA EN LA PROGRAMACION.
TEXTO A SONIDO
001 Encendido
Bienvenido el sistema se activa con la palabra robot.
002 Respuesta comando robot
Por favor…diga la acción que desea realizar
003 Respuesta a comando erróneo
Comando invalido…. Intente de nuevo por favor…
004 Respuesta a comando adelante
Adelante cabecera
005 Respuesta a comando atrás
Atrás cabecera
006 Respuesta a comando arriba
Subiendo cama
007 Respuesta a comando abajo
Bajando cama
008 Respuesta a comando sin respuesta
Por favor repita
009 Respuesta a comando para
Motores apagados
Fuente: investigacion directa Elaborado por: Peña Vera Cristhian Geovanny
Luego de esta breve exposición de los comandos utilizados en el
proyecto; estos comandos fueron compilados por QuickSyntesis y luego
subidos al EasyVR comander.

Análisis e interpretación de resultados 57
3.1.8 Asentamiento del sistema
La implementación de la cama automatizada, se dividió en diferentes
partes; la primera fue las conexiones de los motores, se conectó las salidas
de los relés, las respectivas tierra y neutro para funcionamiento y protección
de los motores. El primer motor realiza un movimiento gradual de 0º a 70º
en el espaldar o cabecera de la cama, el segundo motor realiza un
movimiento subiendo o bajando toda la cama de 40 cm a 80 cm de altura
del piso. (U. Israel, 2015)
FIGURA N°38
CONEXIONES DE LOS MOTORES EN LA CAMA.
Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny
Hay que notar en la Figura N°27 cómo la señal de la fase va
conectada a la entrada del contactor normalmente abierto del relé, y éste
sólo cerrará el circuito y pondrá a funcionar el motor o actuadores sólo si
se activa el relé, Se implementó un interruptor y dos tomacorrientes para
que el sistema se haga más sencillo de conectar y acoplar cualquier
ventilador o calefactor que se encuentre en el mercado.
Se podría conectar cualquier otro tipo de artefactos electrónicos que
no sobrepasen los 3 amperios de corriente. (U. Israel, 2015).

Análisis e interpretación de resultados 58
FIGURA N°39
IMPLEMENTACIONES DE TOMA CORRIENTES.
Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny
Se realizó un análisis de la corriente consumida por el sistema para
realizar las conexiones con un cable adecuado sin que exista ninguna
sobrecarga en el conductor del circuito.
FIGURA N°40
ANÁLISIS DE LA CORRIENTE PARA EL USO DE CABLEADO
Fuente: investigación directa Elaborado por: Peña vera Cristhian Geovanny
Todas las conexiones son realizadas con las debidas precauciones,
aislándola para que no existan contactos a masa o cortocircuitos, a razón
de que se trabajará con voltajes altos.

Análisis e interpretación de resultados 59
Se colocó canaletas y los cables que se usaron fueron aislados para
que no existan cortocircuitos en el sistema asegurando el buen
funcionamiento del proyecto. (U. Israel, 2015)
En esta imagen se observa el producto terminado, se añadió un case
de plástico que cubra toda la circuitería para que no exista manipulación.
FIGURA N°41
MUESTRA EL PRODUCTO TERMINADO DE LA CAMA
AUTOMATIZADA POR COMANDO DE VOZ
Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny
3.1.9 Observaciones sobre el prototipo electrónico dirigido
por comando de voz.
El prototipo ya terminado se lo realizó mediante el estudio y análisis
haciendo un procedimiento paso a paso de los módulos de Arduino y del
reconocimiento de voz.
Se realizó algunos cambios para mostrar que la teoría del sistema
automatizado de reconocimiento de voz sea verídica, implementando el
Arduino y el EasyVR, instalando el Arduino como un interfaz para la
comunicación del módulo de reconocimiento de voz.

Análisis e interpretación de resultados 60
Se reemplazó el módulo de 8 relés por el motivo que en el prototipo
no se utilizará gran cantidad de energía, solo se utilizara 5 v, ya que los
relés realizan la función de amplificar grandes cantidades de energía.
Como en este caso la implementación de la cama no se mostrara por
motivo económicos y porque el análisis y el diseño se centran al sistema
electrónico automatizado por comando de voz se pudo hacer algunos
cambios.
Se utilizó servo-motores los cuales realizan cada movimiento
ordenado por los comandos programados, esto servirá para mostrar que el
sistema automatizado por comando de voz tiene éxito y con esto se
beneficiará a las persona con discapacidades
3.2 Impacto: indicadores de cada etapa de la investigación para
ver si se ha cumplido con los objetivos expresados en el
Proyecto.
3.2.1 Prueba de funcionamiento del EasyVR
Para el análisis del funcionamiento del EasyVR se realizó algunas
pruebas, también se analizó dos aspectos el primero es la detección, donde
se hizo la prueba para ver si los comandos son correctos, si en caso de
alguna falla se tiene como opción repetir el comando de voz.
El segundo aspecto analizado es la transmisión de un comando,
indicando con la producción de un sonido que el comando fue enviado
correctamente, en caso que esta tuviera una falla el sonido se pasaría a
revisar nuevamente los códigos.
También se probó la asertividad del sistema del reconocimiento de
voz para comprobar en qué tiempo se tarda en reconocer cada comando
con la ayuda de la comunicación serial.

Análisis e interpretación de resultados 61
TABLA N°6
PRUEBA DEL EASYVR
Elaborado por: PeÑa Vera Cristhian Geovanny Fuente: (peña, 2017)
3.2.2 Prueba de funcionamiento del Arduino mega
Se realiza mediante una conexión de USB a través del Arduino que
está conectado a la PC, esta comunicación solo se puede realizar mediante
su interfaz de Arduino por su monitor de serie y comprobamos si se ha
establecido la conexión.
TABLA N°7
PRUEBA DEL ARDUINO MEGA
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Análisis e interpretación de resultados 62
3.2.3 Prueba de funcionamiento de la integración del Arduino
Mega y el EasyVR.
Para verificar si la integración es correcta nos hemos dirigido
directamente al código Arduino en el modo normal, la respuesta se
muestran en el Arduino monitor serial, donde indicará la perfecta conexión
del módulo.
Se hizo algunas validaciones para comprobar los comandos enviados
por EasyVR hacia el Arduino, esto servirá para ver si están siendo tratados
correctamente y realizar la acción previamente estipulado.
3.2.4 Prueba del funcionamiento de la cama automatizada.
En este caso son varios factores que influyen para este
funcionamiento.
Entre estos están los engranajes de los motores, los movimientos que
realiza, se verificó los diferentes actuadores y módulos que hacen posible
que este proyecto funcione.
También se les hizo prueba a todos los elemento del circuito para
verificar que funcionen correctamente.

Análisis e interpretación de resultados 63
TABLA N°8
PRUEBA DE LA CAMA AUTOMATIZADA
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
3.2.5 Análisis técnicas
Hasta el momento no hubo ninguna novedad en cuanto al
funcionamiento del sistema después de haber realizado mediante pruebas
cada parte que conforma el proyecto del sistema.

Análisis e interpretación de resultados 64
TABLA N°9
EVALUACION Y OBSERVACIÓN
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny
TABLA N°10
MUESTRA LAS CONDICIONES DE TRABAJO
SIMBOLO PARAMETROS MÍN TÍP. MAX. UNIDAD
VCC Tensión de alimentación 3.3 5 5.5 V
Ta Temperatura ambiente de trabajo 0 25 70 °C
ERX Recepción de datos serie 0 - Vcc V
ETX Transmisión de datos serie 0 - vcc V
Elaborado por: Peña Vera Cristhian Geovanny Fuente: (peña, 2017)

Análisis e interpretación de resultados 65
TABLA N°11
CARGAS ELECTRICAS VOLTAJES MÁXIMOS Y MÍNIMOS
SÍMBOLO PARAMETROS MÍN TÍP MAX UNIDAD
VIH Tensión de entrada del nivel 1 2.4 3.0 3.3 V
VIL Tensión de entrada del nivel 0 -0.1 0.0 0.75 V
IIL Corriente de fuga de entrada <1 10 uA
VOH Tensión de salida del nivel 1 2.4 V
VOL Tensión de salida del nivel 0 0.6 V
Elaborado por: Peña Vera Cristhian Geovanny Fuente: (peña, 2017)
TABLA N°12
CONSUMO DE CORRIENTE DEL EASYVR EN FUNCIONAMIENTO
ACTIVO.
SÍMBOLO PARAMETROS MÍN TÍ
P
MAX UNIDAD
SLEEP Consumo en el modo sleep <1 mA
OPER Consumo en el modo normal de trabajo 12 mA
SPEAKER Consumo en producción de audio 180 mA
Elaborado por: Peña Vera Cristhian Geovanny Fuente: (peña, 2017)
3.3 Análisis del proyecto implementado
3.3.1 Análisis positivo
Técnico calificado para la realización del proyecto.
Tecnología de hardware y software se maneja en Open Sourcer.
Elemento existente en el mercado ecuatoriano.
Su funcionamiento se realiza con cualquier tipo de voz y su porcentaje
de efectividad es muy buena.

Análisis e interpretación de resultados 66
3.3.2 Análisis negativo
El micro-controlador y el módulo EasyVR tienen un límite de
memoria, lo cual restringieron y limitaron los comandos al usar las
palabras predefinidas.
Los comandos programados en el EasyVR solo funcionara para la
persona que grabaría el comando.
El sistema automatizado tendrá complicaciones de funcionamiento
cuando exista ruido excesivo al punto que hasta puede dejar de
funcionar.
La máxima distancia de uso al enviar los comandos es de 60 cm.
3.4 Costo del proyecto
TABLA N°13
PARTE ELECTRÓNICA
Fuente: investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Análisis e interpretación de resultados 67
TABLA N°14
PARTE ELÉCTRICA
Cable # 16 AWG
15 $ 0,60 $ 9,00
Cinta aislante
1 $ 0,60 $ 0,60
Toma corriente
1 $ 3,00 $ 3.00
Cajetín
1 $ 0,50 $ 0,50
Canaletas
1 $ 2,00 $ 2,00
Amarras plástica
100 $ 0,02 $ 2,00
Borneras
2 $ 1,50 $ 3,00
Tornillos
4 $ 0,25 $ 1,00
Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny
TABLA N°15
OTROS GASTOS
Transporte
2 $ 10,00 $ 10,00
Alimentación
2 $ 10,00 $ 10,00
Mano de obras
1 $ 50,00 $ 10,00
Gastos varios
1 $ 10,00 $ 10,00
Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny
TOTAL $ 182,8 Fuente: Investigación directa Elaborado por: Peña Vera Cristhian Geovanny

Análisis e interpretación de resultados 68
3.5 Conclusiones
El proyecto de investigación realizado, se centra para todas esas
personas que tienen algún tipo de discapacidades ya sea parcial o total,
para personas con problemas motrices y también para las personas
adultas mayores, que por su edad tienen problemas de movimientos.
Se ayudará gracias al desarrollo de la electrónica y la tecnología a
mejorar su estadía hospitalaria o en cualquier lugar que estén aislados,
simplemente realizando acciones de comando de voz sin tener la
necesidad de otras personas que las ayude.
Se utilizó y se aprendió los métodos de reconocimiento de voz
mediante el computador, el android y modulo electrónico EasyVR dando
como solución utilizar el módulo EasyVR porque es más factible en su
costo.
Se reconoció los comandos programados y se configuró paso a paso
una nueva tabla de sonidos, también programar las tareas para cada
comando de voz mediante los módulos de hardware libres tales como la
placa de Arduino y el EasyVR.
El shield de reconocimiento de voz es un escudo para la placa de
Arduino que integra el EasyVR que permite simplificar la conexión al
módulo principal que es el Arduino y la pc, resultando ser buenas
opciones para el desarrollo de prototipos que necesiten reconocimiento
de voz.
Al reconocer un comando también se activaron los sonidos
guardados en la memoria del módulo EasyVR para verificar que el
comando se ejecutó correctamente, Se implementó el método de control
por voz que tuvo un porcentaje de asertividad muy alto, dando a conocer
que el sistema puede funcionar con cualquier tipo de voz.

Análisis e interpretación de resultados 69
Se utilizó el módulo de 8 relés para ejecutar el movimiento que realiza
la cama cada vez que se envía un comando de voz
Se realizó el desglose de cada material utilizado en el proyecto, y su
costo en el mercado son relativamente bajos, y es aplicable para otros
sistemas electrónicos.
Los sistemas tecnológicos e inteligentes dan nuevos beneficio para
las personas que realmente lo necesita, mejorando los métodos de
atención en atención automatizada para pacientes con problemas de
movimientos y discapacidades.
3.6. Recomendaciones
Buscar textos de varios idiomas para que la investigación tenga más
provecho para las personas que vivan en otras partes del mundo.
programar el módulo de reconocimiento de voz, para que solo sea
reconocido el tono de voz de la persona que va a utilizar el sistema.
Para tener mayor capacidad del funcionamiento del sistema se
Adquiera una memoria externa o el uso de un ordenador e
incorporarlas.
Enviar los comando de voz a una distancia de 60 cm caso contrario
Tendría que elevar el tono de voz para poder ser receptado.
Omitir la reproducción de la tabla de sonido, con esto se ganaría
mayor rapidez eliminando la reproducción del audio.
Máximo hasta dos personas puede hacer uso de la cama, si hay
sobre peso puede tener problemas los movimientos automatizado.
ANEXOS

Anexos 71
ANEXO N° 1
LEY ORGÁNICA DE DISCAPACIDADES.
Capitulo II
De las personas con discapacidad, sus derechos, garantías y
beneficios.
Artículo 6.-
Persona con discapacidad.- Para los efectos de esta Ley se considera
persona con discapacidad a toda aquella que, como consecuencia de una
o más deficiencias físicas, mentales, intelectuales o sensoriales, con
independencia de la causa que la hubiera originado, ve restringida
permanentemente su capacidad biológica, sicológica y asociativa para
ejercer una o más actividades esenciales de la vida diaria, en la proporción
que establezca el Reglamento.
El Reglamento a la Ley podrá establecer beneficios proporcionales al
carácter tributario, según los grados de discapacidad, con excepción de los
beneficios establecidos en el Artículo 74. (LEY ORG.DE
DISCAPACITADOS, 2013)
Sección Cuarta
Del registro nacional de personas con discapacidad y de
personas jurídicas dedicadas a la atención de personas con
discapacidad.
Artículo 13.-
Registro Nacional de Personas con Discapacidad.- La autoridad
sanitaria nacional será la responsable de llevar el Registro Nacional de
Personas con Discapacidad y con Deficiencia o Condición incapacitante,
así como de las personas jurídicas públicas, semipúblicas y privadas

Anexos 72
dedicadas a la atención de personas con discapacidad y con deficiencia o
condición incapacitante, el cual pasará a formar parte del Sistema Nacional
de Datos Públicos, de conformidad con la Ley. (LEY ORG.DE
DISCAPACITADOS, 2013)
Capítulo segundo
De los derechos de las personas con discapacidad
Artículo 16.-
Derechos.- El Estado a través de sus organismos y entidades
reconoce y garantiza a las personas con discapacidad el pleno ejercicio de
los derechos establecidos en la Constitución de la República, los tratados
e instrumentos internacionales y esta ley, y su aplicación directa por parte
de las o los funcionarios públicos, administrativos o judiciales, de oficio o a
petición de parte; así como también por parte de las personas naturales y
jurídicas privadas. (LEY ORG.DE DISCAPACITADOS, 2013)
Sección segunda
De la salud
Artículo 19.-
Derecho a la salud.- El Estado garantizará a las personas con
discapacidad el derecho a la salud y asegurará el acceso a los servicios de
promoción, prevención, atención especializada permanente y prioritaria,
habilitación y rehabilitación funcional e integral de salud, en las entidades
públicas y privadas que presten servicios de salud, con enfoque de género,
generacional e intercultural. La atención integral a la salud de las personas
con discapacidad, con deficiencia o condición incapacitante será de
responsabilidad de la autoridad sanitaria nacional, que la prestará a través
la red pública integral de salud.
(LEY ORG.DE DISCAPACITADOS, 2013)
Anexos 73
ANEXO N°2
AUDACITY PROGRAMA QUE SIRVE PARA GRABAR Y EDITAR LOS
SONIDOS DENTRO PARA IMPORTARLO AL MÓDULO DEL EASYVR
El audacity es un programa libre y de código abierto para grabar y
editar sonidos.
El audacity puede grabar sonidos en directo usando un micrófono o
un mezclador, con algunas tarjetas de sonido puede incluso capturar flujo
de sonidos, es distribuido bajo la licencia GPL.
Este software se lo utilizará para convertir el audio, de tal forma que
sea compatible para que sea subido al EasyVR.
Fuente: http://www.audacityteam.org/about/screenshots/ Elaborado por: Peña Vera Cristhian Geovanny

Anexos 74
ANEXO N°3
BALABOLKA ES EL SOFTWARE QUE PERMITE CONVERTIR CUALQUIER TEXTO EN AUDIO
Fuente: http://www.cross-plus-a.com/es/balabolka.htm Elaborado por: Peña Vera Cristhian Geovanny

Anexos 75
ANEXO N°4
SOFTWARE DE AUTOMATIZACIÓN DE DISEÑO ELECTRÓNICO QUE AYUDA A LOS DISEÑADORES PARA QUE SUS PROTOTIPOS PASEN
A PRODUCTOS FINALES.
Fuente: http://blog.fritzing.org/category/fritzing-software/ Elaborado por: Peña Vera Cristhian Geovanny

Bibliografía 76
Bibliografía
José Manuel Huidobro, (2013), Manual de Domótica, Investigación de
los-sistemas-demótico. https://books.google.com.ec/books
Jonathan Amangandi, (20 de marzo, 2015), Arduino, Que es Arduino
http://jamangandi2012.blogspot.com/2014/10/que-es-arduino-te-lo-
mostramos-en-un.html
Dimakers, (10 de octubre, 2015), Diymakers Arduino Community,
tutoriales de Arduino. http://diymakers.es/wall-e/
Consejo Nacional para la igualdad de discapacidades, (2017),
Constitución de la Republica Conadis, Articulo 156 de la igualdad de
discapacidades. http://www.consejodiscapacidades.gob.ec/wp Ley
Orgánica de discapacidades, (25 de septiembre, 2012), Ley orgánica de-
discapacidades.
content/uploads/downloads/2014/02/ley_organica_discapacidades.df
Jr Eleazar Ramirez trejo, (04 de febrero, 2014), laboratorio de robótica,
tutorial del EasyVR shield, tabla de sonido
https://laboratorioderobotica.wordpress.com/easyvr-shield/tutorial-
easyvr-shield-parte-2-tablas-de-sonido/.
Antoni García González, (23 de enero, 2014), PanamaHitek
características del Arduino. http://panamahitek.com/arduino-mega-
caracteristicas-capacidades-y-donde-conseguirlo-en-panama/

Bibliografía 77
Javier Panta Martínez, (2014), Evsinf, Universidad Politécnica de valencia,
control demótico por voz.
https://riunet.upv.es/bitstream/handle/10251/17631/Memoria.pdf?seq
uence=1
Osvaldo Javier Hinojosa Rdz, (28 de mayo, 2015), Robotypic,
configuraciónEasyVR,http://robotypic.blogspot.com/2015/03/configur
acion-del-easyvr.html
Carlos Rodríguez, (2015), Repositorio de la Universidad Israel, proyecto
de reconocimiento de voz. Http://190.11.245.244/handle/47000/883
Marcelo Luqués, (08 de junio, 2016), VbMundo, comparación de
diferentes AVR de Arduino. http://www.vb-mundo.com/comparacion-
de-diferentes-avr-de-arduino/
Montserrat Acosta, (10 de Abril, 2015), Ehow en español, historia de los
microcontroladores. http://www.ehowenespanol.com/historia-del-
microcontrolador-info_516984/
http://conceptodefinicion.de/arduino/
http://4imedio.blogspot.mx/2015/03/tabla-de-sonidos-easyvr-desde-
cero.html
http://silicio.mx/easyvr-modulo-multi-proposito-de-reconocimiento-de-voz
http://4imedio.blogspot.com/2014/03/tabla-de-sonidos-easyvr-desde-
cero.html

Bibliografía 78
http://dfists.ua.es/~jpomares/arduino/page_02.htm
http://definicionyque.es/arduino/
http://www.electronicaestudio.com/microcontrolador.htm#inicio (EasyVR,
2014)
http://www.geekfactory.mx/tienda/relevadores-y-switches/modulo-de-8-
relevadores-con-optoacoplador/
http://jmloureiro77.blogspot.com/2014_08_01_archive.html
https://forum.arduino.cc/index.php?topic=168930.
http://www.cec.uchile.cl/~mcarter/EL54B/Informe%20SPDI%20presentaci
ones/pic.pdf