







Idiomas
Páginas
Jurídico


Funciones trigonométricas
d
yy
hipotenusa
opuestocatetosen 12
d
xx
hipotenusa
adyacentecateto 12cos
12
12tanxx
yy
adyacentecateto
opuestocateto
y + (m)
x + (m)0 1 2 3 4
1
2
-1
-1-2-3-4
3(4,3)
Cateto opuesto
Hipotenusa
Cateto adyacente
- 2

El ángulo se encuentra sacando el inverso de la función seleccionada
El sentido se estipula haciendo referencia a los puntos cardinales. El ángulo anterior se expresa en función de dichos puntos como:
Lo cual indica que el ángulo se está midiendo hacia el Norte a partir del Este.
EdelNal087.36
0111121 87.36)6.0(5
3
5
03
sen
m
msen
m
mmsen
d
yysen

Un cuerpo cambia de posición, si cambia una de las parejas coordenadas (x , y)
Eso implica que hay desplazamiento.
Este se calcula de la forma acostumbrada
Posición final – Posición inicial
Como involucra dos variables (x , y) se utiliza el teorema de Pitágoras para determinar la magnitud del desplazamiento (que en la mayoría de las situaciones, no es igual a la distancia recorrida).
CAMBIO DE POSICIÓN EN EL PLANO

Representación gráfica de CAMBIO DE POSICIÓN EN EL PLANO
y + (m)
x + (m)0 1 2 3 4
1
2
-1
-1-2-3-4
3 (4,3)
- 2
A
B
Posición inicial
Posición final

El DESPLAZAMIENTO resultante o cambio de posición se representamediante la flecha C que va desde la posición inicial hasta la posiciónfinal.
Tiene las siguientes características:
Magnitud (o longitud): 5
Unidad: metros
Dirección: 36.87 0
Sentido: al Norte del Este
Todas las cantidades físicas que cumplan con lascaracterísticas anteriores, se les denominan VECTORES .
Vector DESPLAZAMIENTO
y + (m)
x + (m)0 1 2 3 4
1
2
-1
-1-2-3-4
3 (4,3)
- 2
C
Posición inicial
Posición final
N
S
O E

E s c a l a r e s
Son todas aquellas cantidades físicas que para especificarsecompletamente basta con dar un número y su unidadcorrespondiente.
Se manejan mediante las operaciones ordinarias de laaritmética: suma, resta, multiplicación y división.
Cantidad física Unidades Cantidad física Unidades
Tiempo 30 s Volumen 10 cm3
Masa 20 kg Gravedad 9.81 m/s2
Distancia, longitud,
profundidad, altura.
50 m Presión 760 mmHg
Temperatura 300 C Densidad 1 Kg/m3
Rapidez m/s Carga 5x10-6
Coulomb

V E C T O R E S
Son todas aquellas cantidades físicas que para especificarsecompletamente hay que proporcionar:
un número (4);
una unidad (m, m/s, Newton, Newton / Coulomb);
una dirección (horizontal, vertical, inclinada);
un sentido (derecha, izquierda, arriba, abajo, eje x positivo, eje xnegativo)
Se representan gráficamente mediante flechas.
Se manejan mediante operaciones especiales:
Suma y resta vectorial
Producto punto o producto escalar
Producto cruz o producto vectorial
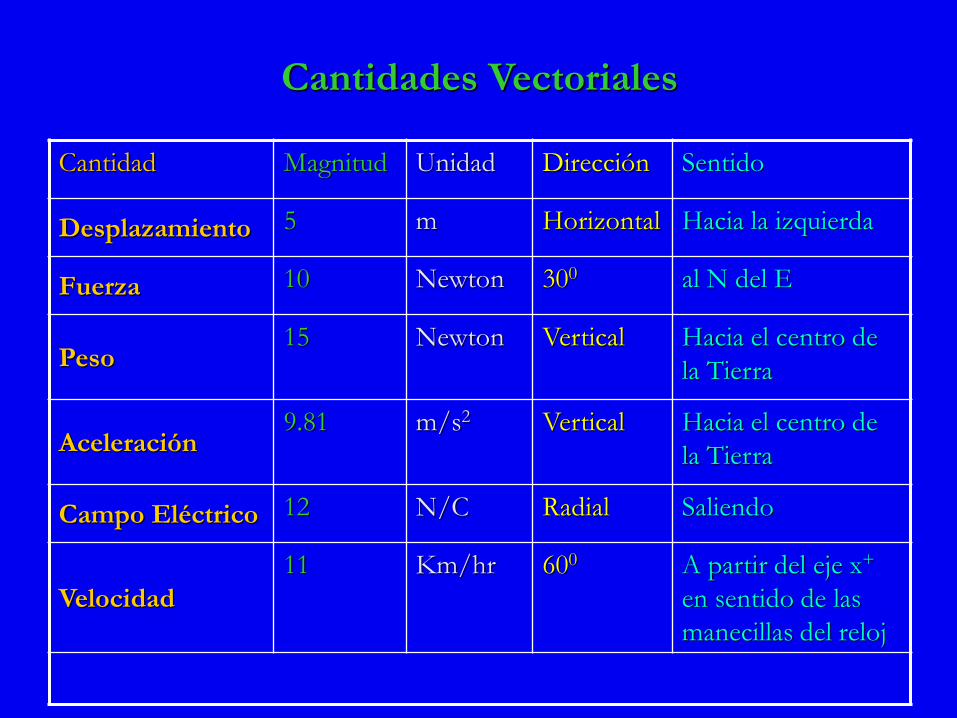
Cantidades Vectoriales
Cantidad Magnitud Unidad Dirección Sentido
Desplazamiento 5 m Horizontal Hacia la izquierda
Fuerza 10 Newton 300 al N del E
Peso15 Newton Vertical Hacia el centro de
la Tierra
Aceleración9.81 m/s2 Vertical Hacia el centro de
la Tierra
Campo Eléctrico 12 N/C Radial Saliendo
Velocidad
11 Km/hr 600 A partir del eje x+
en sentido de las
manecillas del reloj

Diferencia entre escalares y vectores
Para diferenciar entre escalares y vectores analicemos los siguientes ejemplos:
La distancia entre dos puntos es de 5 metros (es un escalar).
Una persona recorre 5 metros de donde estaba inicialmente.
(hay un cambio de posición o desplazamiento)
5 es el NÚMERO de metros y éste a su vez es la UNIDAD. Sinembargo no podemos localizar a la persona, puede estar ubicada encualquier punto de una circunferencia de radio 5 metros, medidos apartir de donde estaba inicialmente. Tenemos que dar suDIRECCIÓN y SENTIDO, por ejemplo, 300 al S del O

Operaciones con Vectores
Como se mencionó anteriormente, los vectores se manejan mediante operaciones especiales siendo éstas:
SUMA VECTORIAL.- Sean A y B dos vectores, se define la suma vectorial como:
A + B = C
donde C es un nuevo vector con su propia magnitud, dirección y sentido.
PRODUCTO ESCALAR O PRODUCTO PUNTO.- Sean A y B dos vectores, se define el producto punto entre los dos vectores como:
A ● B = |A| |B| cos θ = A B cos θ = B A cos θ = C
donde A B cos θ = C es un escalar que posee únicamente magnitud y unidad.
θ es el MENOR ÁNGULO que se forma entre los dos vectores. Si

Operaciones con Vectores …
00 < θ < 900 A ● B > 0
θ = 900 A ● B = 0
900 < θ < 2700 A ● B < 0
θ = 2700 A ● B = 0
2700 < θ < 3600 A ● B > 0

Operaciones con Vectores
PRODUCTO VECTORIAL O PRODUCTO CRUZ
Sean A y B dos vectores, se define el producto vectorial como:
donde C es un nuevo vector La MAGNITUD del vector C viene dada por:
A x B = C
|C| = C = | A x B | = | A | | B | sen θ = AB sen θAB
Donde θAB es el menor ángulo que se forma entre los vectores
La DIRECCIÓN del vector C es perpendicular tanto al vector A como al B
Su SENTIDO viene dado por la REGLA DE LA MANO DERECHA

Regla de la mano derecha
Con los dedos extendidos de la mano derecha y el pulgarperpendicular a ellos, tratar de empujar la punta del primer vectorhacia la punta del segundo vector cerrando los dedos y dejandoextendido el pulgar, el sentido en el que apunta este pulgar, nosindicará el sentido hacia donde apunta el vector C o productovectorial entre los dos vectores
A
B
C = A x B
A
B
C' = B x AA x B = - B x A
Si el ángulo entre los dos vectores es de 900, entonces el producto vectorial entre ellos es el VECTOR NULO o Vector cero, ya que Sen 900 = 0
Nota: Los vectores A y B forman o están en un plano, siendo el vector Cperpendicular a dicho plano, por ejemplo, es como si los vectores A y Bestuviesen en el piso, luego entonces, el vector C estaría saliendo oentrando perpendicularmente al piso.

Para sumar dos o más vectores, existen dos métodos:
1. Métodos Gráficos
Método del paralelogramo (es ideal para dos
vectores)
Método del polígono ( Para sumar más de dos
vectores)
2. Método Analítico
Suma de V e c t o r e s

Método del Paralelogramo
A
B
A
B
* Se unen los orígenes de los dos vectores.
*A partir de sus puntas o terminaciones se trazan paralelas a cada
uno de ellos formando una paralelogramo.
*La diagonal de dicho paralelogramo es el vector suma, lo cual se
ilustra mediante el siguiente ejemplo:

Consiste en unir el origen del segundo vector con la punta del
primero. Si son mas de dos vectores, unir el origen del tercer vector
con la punta del segundo y así sucesivamente, el vector resultante es
el que va desde el origen del primero hasta la punta del último.
A
B
BCA
C
DD
Método del Polígono

Ley conmutativa de la suma:
Al sumar dos o mas vectores se obtiene el mismo resultado, no importa el orden en que se sumen. Del ejemplo anterior:
A
B
C
D
BA
C
D
C
D
A
B
Propiedades de la Suma Vectorial

Ley asociativa de la suma:
Al sumar dos o mas vectores, algunos o todos se pueden asociar para obtener semi-resultantes, las cuales se suman a su vez para obtener el vector resultante. Del ejemplo anterior:
Propiedades de la Suma Vectorial
A
B
B
C
A
C
D
D
A +D
C + B

Multiplicación de un vector por un escalar
Al multiplicar un vector por un escalar, se obtieneun nuevo vector ( B ) que es k veces mayor, k vecesmenor o bien igual que el vector que le dio origen,todo depende del escalar. Ejemplo:
Propiedades de la Suma Vectorial
FB = 2 F
k = 2
k = 1/2
W = 1/2 F = F/2

Negativo de un vector
El negativo de un vector S es aquél que tiene la mismamagnitud y dirección que S pero sentido contrario.
El negativo de un vector S es aquél que hay quesumarle a S para obtener el vector nulo.
O bien el vector multiplicado por un escalar unitarionegativo. Ejemplo:
Propiedades de la Suma Vectorial
S
-S
B = - S
k = - 1
S + ( - S ) = 0

Se define la resta de vectores como:
A - B = A + ( - B ) = R
Para restar un vector B al vector A, se procede igual que en la suma con la única salvedad de que se toma el negativo del vector B. Ejemplo
A
BA
- B
Resta de Vectores

Se define la resta de vectores como:
A - B = A + ( - B ) = R
Para restar un vector B al vector A, se procede igual que en la suma con la única salvedad de que se toma el negativo del vector B. Ejemplo
Resta de Vectores
A
B
A
- B
- A
B

Una vez elegido el plano, se definen las componentes Ax y Ay de un vector como las proyecciones o sombras del vector sobre los ejes coordenados, éstas se obtienen trazando paralelas a los ejes a partir de la terminación del vector.
M E T O D O A N A L Í T I C Ocomponentes rectangulares
A
0 1 2 3 4
1
2
-1
-2
-3
-1-2-3-4l l l l l
l l ll l l l l
l ll
l
3
x +
y +
A x
A y

Cuando se proporciona la magnitud del vector y su orientaciónmediante el ángulo, las componentes rectangulares se calculanutilizando las funciones trigonométricas.
Se forma un triángulo rectángulo, en donde las componentes vienensiendo los catetos y la hipotenusa la magnitud del vector. Aplicandolas funciones trigonométricas:
Método analítico: cálculo de las componentes rectangulares
A y
A
0 1 4
1
-1
-1
l l
l l l
3
x +
y +
A x
cateto adyacente
cateto opuesto
hipotenusa
cateto opuestosen = =
A y
|A|
despejando la componente vertical:
despejando la componente horizontal: A x= |A| cos
cos =hipotenusa
cateto Adyacente
= A x
|A|
A y = |A| sen

Cuando se proporcionan las componentes rectangulares (A x , A y ) de un vector, se puede conocer: Su magnitud aplicando el teorema de Pitágoras Su orientación mediante el inverso de la función tangente del ángulo.
A y
A
0 1 4
1
-1
-1
l l
l l l
3
x +
y +
A x
|A| = √ (A x )2 + ( A y )2
= tan -1A y
A x
tan =cateto opuesto
cateto adyacente
A y
A x
=
Método analítico: cálculo de la magnitud y ángulo de un vector

Cuando se proporcionan las componentes rectangulares (A x , A y ) de un vector, éste puede estar en:
I cuadrante si: Ax > 0 y Ay > 0 sentido al N del E II cuadrante si: Ax < 0 y Ay > 0 sentido al N del O III cuadrante si: Ax < 0 y Ay < 0 sentido al S del O IV cuadrante si: Ax > 0 y Ay < 0 sentido al S del E
Método analítico: ubicación y orientación de un vector
x +
A y
A
0 1 4
1
-1
-1
l l
l l l
3
x +
y +
A x
A y < 0
A
y +
A x < 0
N
S
O E
Aplicando la igualdad de vectores

Método analítico: problema de la tangente
si: | Ax | > | Ay | mas orientado al eje X
si: | Ay | > | Ax | mas orientado al eje Y
A y > 0
A
0 4-1
-1
l
l l
2
x +
y +
A x > 0
A x y A y > 0
O
x +
A y < 0
A
y +
A x < 0
N
S
E
A x y A y < 0
En ambos casos la función tan θ es positiva. Se recomienda graficarlos para visualizarlos o, analizar signospara ubicarlos en el cuadrante respectivo. Su orientación seráde acuerdo a:
-4
-2

A
0 4-1
-1
l
l l
2
x +
y +
Método analítico: problema del ángulo y los ejes
El puede ser dado respecto al eje x o con respecto al eje y. Hay quetener cuidado al aplicar las funciones trigonométricas para calcular lascomponentes, pues con una misma función, las componentes CAMBIAN.
A
0 4-1
-1
l l l
2
x +
y +
hip.
cat. op.sen = =
A y
|A|
A y = |A| sen
A x = |A| cos
hip.
cat. op.sen = =
A x
|A|
A y = |A| cos
A x = |A| sen

Suma de vectores: método analítico
A
B
R
R
B
A
A x B x
R x
A y
B y
R y
x +
y +| R |= √ ( Rx)2 + (Ry)2
Donde:
Rx= Ax + Bx
Ry= Ay + By
Además:
Ax = | A | cos θA
Ay = | A | sen θA
Bx = | B | cos θB
By = | B | sen θB
R= tan -1Ry
Rx

Representación de vectores: vectores unitarios
Para representar un vector en forma vectorial, lo analizaremos mediante los siguientes ejemplos:
A = |A|
Simbología incorrecta, ya que un vector no puede ser igual a un escalar como lo es la magnitud de un vector.
A = A x + A ySimbología incorrecta, ya que un vector no puede ser igual a la suma de dos escalares como lo son las componentes rectangulares de un vector.
|A| = A x + A ySimbología incorrecta, ya que la magnitud de un vector se determina mediante el teorema de Pitágoras.
Como se puede apreciar, aún no contamos con una terminología para describir a un vector en notación vectorial.
Para suplir esta falta de información, se definen los vectores unitarios î , ĵ cuya magnitud como su propio nombre lo indica es la unidad y su dirección es a lo largo de los ejes coordenados, su sentido saliendo del origen.
Veámoslos en el plano.

Vectores unitariosPara indicar que se trata de un vector unitario, encima de la letra se le pone un gorrito.
La letra î se reserva para el vector unitario en la dirección del eje de las x positivo
La letra ĵ para el vector unitario en la dirección del eje de las y positivo.
También pueden ser escritos en negritas.
Se le conocen también como vectores direccionales
î = iĵ = j
| î | = | ĵ | = 1
1 2
1
2
î
ĵ
x +
y +
Un vector se representa como:
A = Ax i + Ay j

Suma de Vectores: método de vectores unitariosSumar los siguientes vectores:
A = 4 i + 5 j
B = 6 i + 2 j
Solución
C = A + B = (4 i + 5 j ) + (6 i + 2 j )
= 4 i + 6 i + 5 j + 2 j
= (4 + 6) i + (5 + 2) j
=10 i + 7 j
ó más sencillo
A = 4 i + 5 j +
B = 6 i + 2 j
R = 10 i + 7 j
R = |R| = √100+49 = √149 = 12.2 u
θ = tan-1 (7/10) = 350
Como Rx y Ry son positivos, el vector resultante se encuentra en el I cuadrante; como Rx >
Ry, mas cargado hacia el eje x. Es decir, al N del E
5 10
5
10
x +
y +
Dibujar los vectores y sumarlos

Producto punto o producto escalar
El producto punto o producto escalar se definió como:A ● B = |A| |B| cos θ = A B cos θ
En función de los vectores unitariosA ● B = (A x i + A y j) ● (B x i + B y j)
Desarrollando:
A●B = A x B x (i●i) + A x B y (i●j) + A y B x (j●i) + A y B y (j●j)
Aplicando la definición
i ● i = (1) (1) cos 00 = 1
i ● j = (1) (1) cos 900 = 0
j ● j = (1) (1) cos 00 = 1
j ● i = (1) (1) cos 900 = 0

Producto Punto
Sustituyendo los productos punto
A ● B = A x B x + A y B yIgualando ambas definiciones
|A| |B| cos θ = A x B x + A y B y
Despejando el ángulo
θ = cos-1A x B x + A y B y
|A| |B|

Ejemplo: Producto Punto
Encontrar el producto punto o producto escalar de los siguientes vectores:A = 4 i + 5 j análisis: I cuadrante a 51.340 al N del E; magnitud 6.4B = 6 i + 2 j análisis: I cuadrante a 17.430 al N del E; magnitud 6.3A ● B = A x B x + A y B y
= 24 + 10= 34
El menor ángulo que forman entre si los dos vectores es:
θ = cos-1
θ = cos-1
θ = 32.90
A x B x + A y B y
|A| |B|
34
√16+25 √36+4

Producto Cruz o producto vectorial
El producto cruz o producto vectorial se definió como:
A x B = |A| |B| sen θ = A B sen θ
En función de los vectores unitarios
A x B = (A x i + A y j) x (B x i + B y j)
Desarrollando:
AxB = A x B x (ixi) + A x B y (ixj) + A y B x (jxi) + A y B y (jxj)
Aplicando la definición
i x i = (1) (1) sen 00 = 0
i x j = (1) (1) sen 900 = k (aplicando la regla de la mano derecha)
j x j = (1) (1) sen 00 = 0
j x i = (1) (1) sen 900 = -k (aplicando la regla de la mano derecha)

Producto Cruz
Sustituyendo los productos cruz de vectores unitarios
A x B = A x B y (k) + A y B x (-k)
A x B = (A x B y - A y B x ) k
Un nuevo vector cuya:
Magnitud es: A x B y - A y B x
Dirección: perpendicular al plano formado por A y B.
Sentido:
Sale del plano si A x B y - A y B x > 0
Entra al plano si A x B y - A y B x > 0

Producto Cruz en tres dimensionesEl producto cruz o producto vectorial de vectores unitariosA x B = (A x i + A y j + A z k) x (B x i + B y j + B z k)Desarrollando:
A x B = A x B x (i x i) + A x B y (i x j) + A x B z (i x k) +A y B x (j x i) + A y B y
(j x j) + A y B z (j x k) + A z B x (k x i) + A z B y (k x j) + A z B z (k x k)
Aplicando la definición
i x i = (1) (1) sen 00 = 0
i x j = (1) (1) sen 900 = k
i x k = (1) (1) sen 900 = - j
j x i = (1) (1) sen 00 = - k
j x j = (1) (1) sen 900 = 0
j x k = (1) (1) sen 900 = i
k x i = (1) (1) sen 00 = j
k x j = (1) (1) sen 900 = - i
k x k = (1) (1) sen 900 = 0

Producto Cruz
Sustituyendo
A x B = AxBy (k) + AxBz (-j) +AyBx (-k) + AyBz (i) + AzBx (j) +
AzBy (-i)
Reagrupando
A x B = (AyBz - AzBy) i + (AzBx - AxBz) j + (AxBy - AyBx) k

Producto Cruz: determinantes
A x B =i j k
Ax Ay Az
Bx By Bz
= +(Ay Bz - By Az ) i - (Ax Bz - Bx Az
) j+ (Ax By – Bx Ay )k