
1. Introducción 1.1 Antecedentes -...
20
1. Introducción 1.1 Antecedentes Los problemas existentes hoy en día respecto al suministro y generación de energía por parte de los medios convencionales han llevado en los últimos años a incentivar y la utilizar las llamadas fuentes de energía renovable. Entre otras, la solar fotovoltaica, la cual aporta actualmente una producción en torno al 1% de la energía consumida en el mundo. Aunque este porcentaje no sea elevado, sus posibilidades de crecimiento y expansión geográfica, así como las recientes investigaciones y desarrollos tecnológicos la convierten en una potencial candidata a ser una de las fuentes de energía alternativa más importantes en un futuro no muy lejano. Por otra parte, la necesidad de convertidores de mayor potencia conduce inevitablemente a un incremento de la tensión y/o corriente en el convertidor y, por tanto, en los dispositivos semiconductores del convertidor. Si la tensión (corriente) que debe bloquear (conducir) el dispositivo supera su valor máximo admisible, una posible solución consiste en recurrir a la asociación serie (paralelo) de dispositivos para alcanzar el valor de tensión (corriente) deseado. No obstante, las asociaciones de dispositivos semiconductores conllevan el problema del equilibrado estático y dinámico de tensiones y corrientes, limitando esta solución a la asociación de unos pocos dispositivos. Los convertidores multinivel resuelven este inconveniente. Con estas topologías, son las estructuras las que se conectan en serie, garantizando la distribución de las tensiones, y eliminando el problema de los equilibrados entre semiconductores. De esta característica, se advierte que los convertidores multinivel alcanzan mayor potencia que los convertidores convencionales al incrementar la tensión de operación. Es preferible un aumento de la potencia mediante un incremento de la tensión, puesto que mayores corrientes implican mayores pérdidas y menor rendimiento. Por otro lado, en comparación con los convertidores convencionales de dos niveles y considerando un nivel de potencia equivalente, los convertidores multinivel pueden presentar un contenido armónico inferior [1]. Para alcanzar dichos objetivo, una profunda investigación con respecto a la conexión a la red; así como estudios para incrementar la rentabilidad de la inversión son necesarios. En este punto, los elementos que componen la cadena de captación y transformación juegan un papel de relevancia.
Transcript of 1. Introducción 1.1 Antecedentes -...
1. Introducción
1.1 Antecedentes
Los problemas existentes hoy en día respecto al suministro y generación de energía por parte de los medios convencionales han llevado en los últimos años a incentivar y la utilizar las llamadas fuentes de energía renovable. Entre otras, la solar fotovoltaica, la cual aporta actualmente una producción en torno al 1% de la energía consumida en el mundo. Aunque este porcentaje no sea elevado, sus posibilidades de crecimiento y expansión geográfica, así como las recientes investigaciones y desarrollos tecnológicos la convierten en una potencial candidata a ser una de las fuentes de energía alternativa más importantes en un futuro no muy lejano.
Por otra parte, la necesidad de convertidores de mayor potencia conduce inevitablemente a un incremento de la tensión y/o corriente en el convertidor y, por tanto, en los dispositivos semiconductores del convertidor. Si la tensión (corriente) que debe bloquear (conducir) el dispositivo supera su valor máximo admisible, una posible solución consiste en recurrir a la asociación serie (paralelo) de dispositivos para alcanzar el valor de tensión (corriente) deseado. No obstante, las asociaciones de dispositivos semiconductores conllevan el problema del equilibrado estático y dinámico de tensiones y corrientes, limitando esta solución a la asociación de unos pocos dispositivos. Los convertidores multinivel resuelven este inconveniente. Con estas topologías, son las estructuras las que se conectan en serie, garantizando la distribución de las tensiones, y eliminando el problema de los equilibrados entre semiconductores. De esta característica, se advierte que los convertidores multinivel alcanzan mayor potencia que los convertidores convencionales al incrementar la tensión de operación. Es preferible un aumento de la potencia mediante un incremento de la tensión, puesto que mayores corrientes implican mayores pérdidas y menor rendimiento.
Por otro lado, en comparación con los convertidores convencionales de dos niveles y considerando un nivel de potencia equivalente, los convertidores multinivel pueden presentar un contenido armónico inferior [1].
Para alcanzar dichos objetivo, una profunda investigación con respecto a la conexión a la red; así como estudios para incrementar la rentabilidad de la inversión son necesarios. En este punto, los elementos que componen la cadena de captación y transformación juegan un papel de relevancia.
1.2 Objetivos
El objetivo del presente proyecto consiste en llevar a cabo la puesta en marcha y validación de un inversor trifásico controlado que sirva como prototipo a posteriores trabajos con objetivos comerciales a una empresa. Los objetivos a implementar son los siguientes:
1. Aplicación de la técnica de modulación SVM (Space Vector Modulation) y control DPC (Direct Power Control).
2. Programación de una FPGA (del inglés Field Programmable Gate Array) para que realice las funciones que se describirán en el apartado 2.
3. Programación de un DSP (del inglés de Digital Signal Processor) para que realice las diversas funciones que se detallarán en el apartado 3.
4. Comunicaciones entre DSP y FPGA.
5. Selección de los componentes para la topología a implementar. Éstos serán IGBT’s (del inglés Insulated Gate Bipolar Transistor), condensadores, resistencias, bobinas, fuentes de continua y transformador de aislamiento galvánico.
6. Simulación del circuito seleccionado como convertidor.
7. Puesta en marcha y validación del circuito real.
1.3 Estado del Arte 1.3.1 Convertidores multinivel clásicos
El término multinivel nació a partir de la presentación del inversor de tres niveles introducido en 1981 [2]. Estos convertidores constan de un conjunto de IGBT’s, fuentes de DC y condensadores. Con un control adecuado de de la conmutación de los interruptores se consigue generar tensiones de salidas elevadas y con formas escalonadas. Se pueden generar un número indeterminado de niveles por cada rama. Aumentando este número de niveles del inversor aumenta el número de escalones de la tensión de salida, consiguiendo una forma de onda con reducida distorsión armónica. Sin embargo, al aumentar el número de niveles aumenta la complejidad en el control de la secuencia de conmutación de los semiconductores para seguir una referencia, así como la complejidad en el control del equilibrado de las tensiones del embarrado de continua.
Las ventajas de estos convertidores son:
o La disposición del voltaje (VDC) de entrada en múltiples niveles permite aumentar varias veces la tensión de salida aumentando el rendimiento del convertidor.
o Permiten disminuir tanto la frecuencia de conmutación como la tensión soportada por los semiconductores de potencia.
o Aumentando las tensiones se aumenta la potencia del convertidor, sin necesidad de incrementar la corriente, disminuyendo las pérdidas por conducción, y mejorando el rendimiento del convertidor.
o La tensión de salida de estos convertidores frente a los convencionales presenta un contenido armónico inferior. Teóricamente puede obtenerse una distorsión armónica nula si se dispone de un número infinito de niveles de la tensión de entrada trayendo como consecuencia la reducción del peso y costo de los filtros.
Las desventajas principales son las siguientes:
o Se usa un gran número de interruptores.
o Se debe tener en cuenta el balanceo de los condensadores para conseguir que estos actúen como una fuente de tensión constante.
Las tres topologías principales que se utilizan para los convertidores multinivel son:
o Diode Clamped Inverters (DCI), también conocidos como convertidores multinivel Diode Clamped (DCM) o Multipoint Clamped (MPC), presentados por primera vez en 1991 [3]. Esta topología se denomina Neutral Point Clamped (NPC) para convertidores de tres niveles, aunque muchas veces el término NPC se utiliza para convertidores de más de tres niveles. En este trabajo se utilizará el término DCI para referirse a los convertidores de topología “Diode Clamped”.
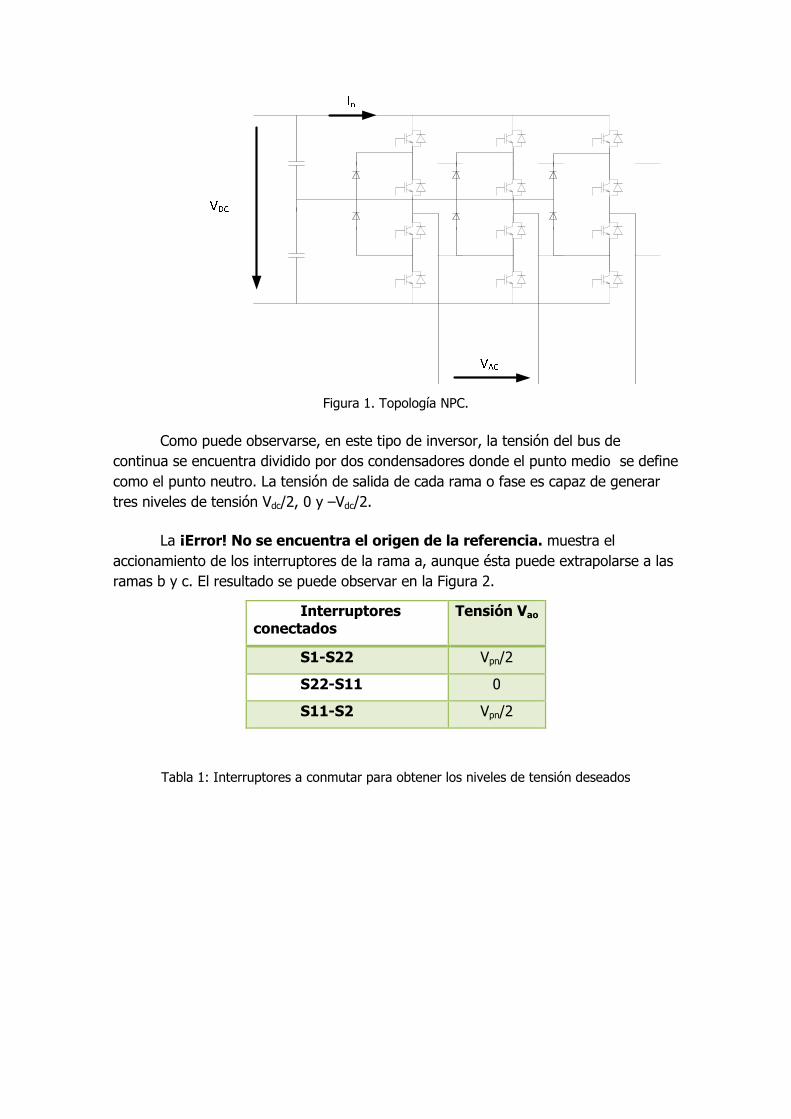
Figura 1. Topología NPC.
Como puede observarse, en este tipo de inversor, la tensión del bus de continua se encuentra dividido por dos condensadores donde el punto medio se define como el punto neutro. La tensión de salida de cada rama o fase es capaz de generar tres niveles de tensión Vdc/2, 0 y –Vdc/2.
La ¡Error! No se encuentra el origen de la referencia. muestra el accionamiento de los interruptores de la rama a, aunque ésta puede extrapolarse a las ramas b y c. El resultado se puede observar en la Figura 2.
Interruptores conectados
Tensión Vao
S1-S22 Vpn/2
S22-S11 0
S11-S2 Vpn/2
Tabla 1: Interruptores a conmutar para obtener los niveles de tensión deseados
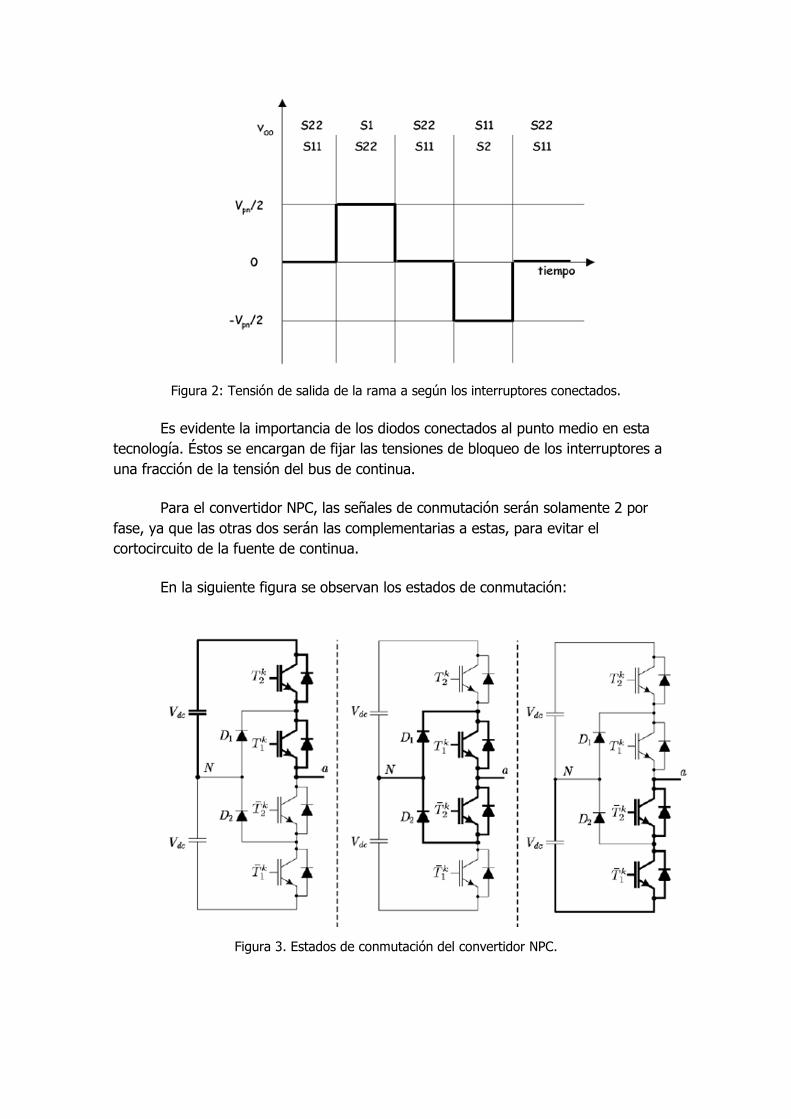
Figura 2: Tensión de salida de la rama a según los interruptores conectados.
Es evidente la importancia de los diodos conectados al punto medio en esta tecnología. Éstos se encargan de fijar las tensiones de bloqueo de los interruptores a una fracción de la tensión del bus de continua.
Para el convertidor NPC, las señales de conmutación serán solamente 2 por fase, ya que las otras dos serán las complementarias a estas, para evitar el cortocircuito de la fuente de continua.
En la siguiente figura se observan los estados de conmutación:
Figura 3. Estados de conmutación del convertidor NPC.

En la figura izquierda se observa el estado correspondiente a S1-S22 de la figura 2. La de en medio se corresponde a S11-S22. La de la derecha, por tanto, al estado S11-S2.
En implementaciones prácticas, un tiempo muerto puede aparecer entre la señal de conmutación de los transistores y su complemento, por lo que ambos transistores pueden estar en estado de no conducción por un instante corto de tiempo. Esto será tratado en profundidad en el capítulo 3, y su implementación en la FPGA.
Estos convertidores presentan un número bajo de condensadores, lo cual se considera una ventaja, aunque haya que incluir diodos de recuperación rápida. Esto es preferible desde el punto de vista de que será mejor tener un bajo número de elementos reactivos.
o Convertidores de condensadores flotantes [4]. También conocidos como Flying Capacitors.
La topología FC es en alguna manera similar a la topología NPC, donde la diferencia principal es que los diodos de fijación son reemplazados por capacitores flotantes de manera que permiten proporcionar los distintos niveles a la tensión de salida del convertidor, como se muestra en la siguiente figura.
El nivel cero se obtiene al conectar la carga al punto positivo o negativo de la capacidad flotante con polaridad opuesta a la fuente DC. Solo dos señales de control son necesarias por fase para evitar el estado de corto-circuito de la fuente DC y el condensador flotante.
Figura 4. Topología de capacidades flotantes.
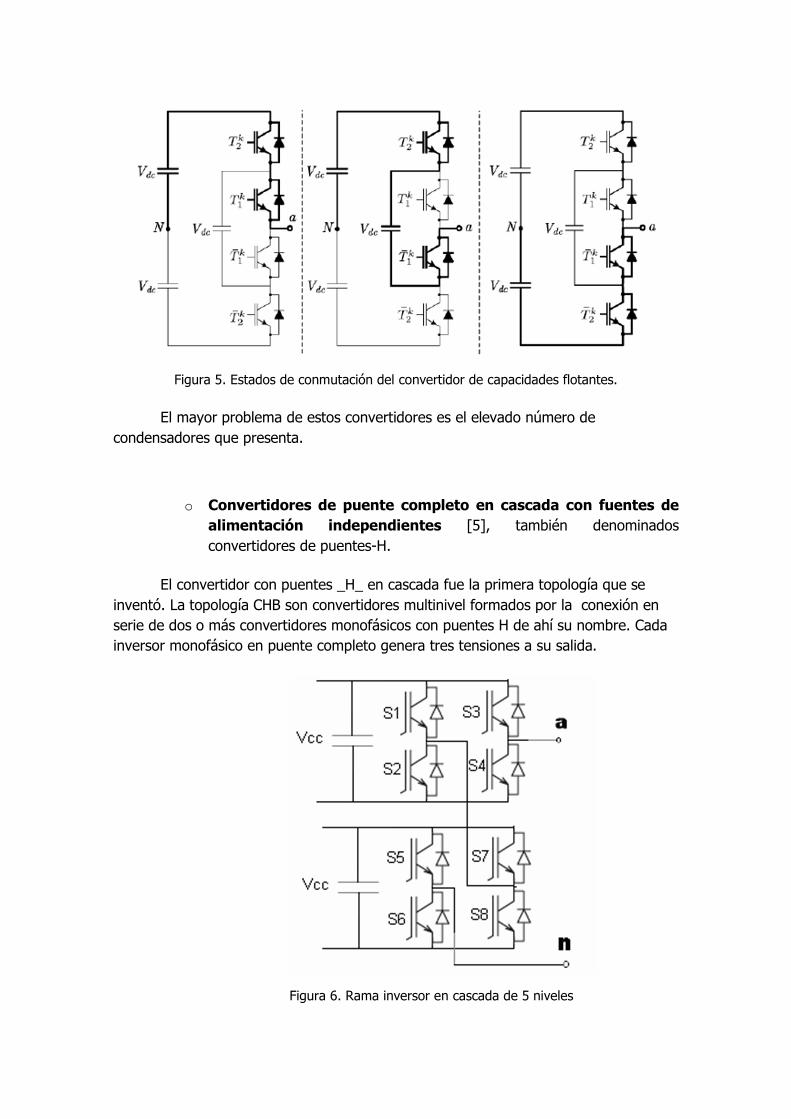
Figura 5. Estados de conmutación del convertidor de capacidades flotantes.
El mayor problema de estos convertidores es el elevado número de condensadores que presenta.
o Convertidores de puente completo en cascada con fuentes de
alimentación independientes [5], también denominados convertidores de puentes-H.
El convertidor con puentes _H_ en cascada fue la primera topología que se inventó. La topología CHB son convertidores multinivel formados por la conexión en serie de dos o más convertidores monofásicos con puentes H de ahí su nombre. Cada inversor monofásico en puente completo genera tres tensiones a su salida.
Figura 6. Rama inversor en cascada de 5 niveles
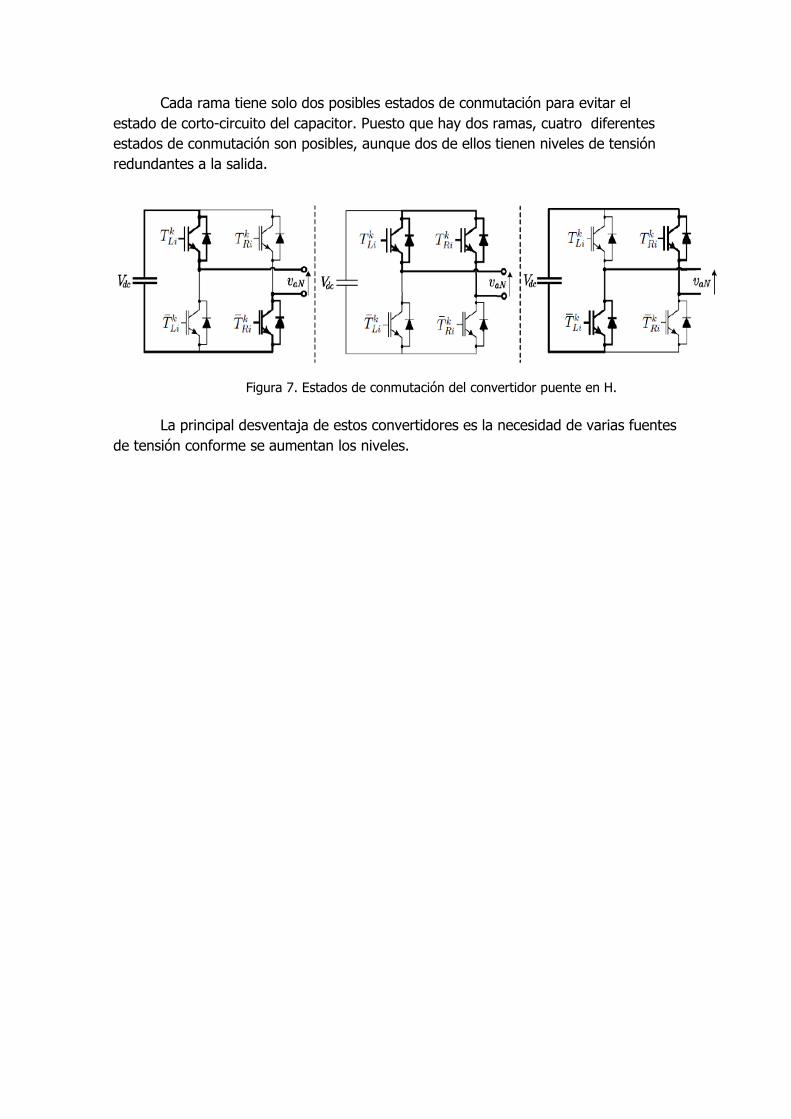
Cada rama tiene solo dos posibles estados de conmutación para evitar el estado de corto-circuito del capacitor. Puesto que hay dos ramas, cuatro diferentes estados de conmutación son posibles, aunque dos de ellos tienen niveles de tensión redundantes a la salida.
Figura 7. Estados de conmutación del convertidor puente en H.
La principal desventaja de estos convertidores es la necesidad de varias fuentes de tensión conforme se aumentan los niveles.
1.3.2 Modulación Space Vector y Direct Power Control
1.3.2.1 Space Vector Modulation.
En este capítulo se presenta el algoritmo para la modulación por vector espacial en tres dimensiones (Three-Dimensional Space Vector Modulation 3D-SVM) para convertidores multinivel desarrollado en el proyecto que se encuentra en la referencia [6], [12].
1.3.2.2 Introducción
La modulación Space Vector (SVM) es un algoritmo usado para controlar PWM [6], [7], [8], [9], [10]. Se usa para la obtención de formas de onda de corriente alterna. Hay diferentes tipos de SVM, que dan lugar a diferentes calidades de forma de onda o de requisitos computacionales. Es de gran interés para la reducción de la distorsión armónica total (THD) creada por las rápidas conmutaciones de estos algoritmos.
Las técnicas de modulación por vector espacial se pueden clasificar en algoritmos para sistemas equilibrados o desequilibrados, dependiendo de la aplicación. Es importante conocer si el vector de referencia contiene armónicos o si la técnica de control debe compensar armónicos o componentes de secuencia cero en sistemas trifásicos de cuatro hilos con neutro.
En el caso en el que el vector de referencia sea puramente sinusoidal, el uso de algoritmos para sistemas equilibrados es suficiente; sin embargo, para los demás casos, la técnica en tres dimensiones debe ser considerada.
La técnica de modulación por vector espacial en tres dimensiones (3D-SVM) presentada en [6] es una generalización de la conocida estrategia de modulación vectorial en dos dimensiones (2D-SVM), la cual se utiliza cuando el sistema es equilibrado (sin armónicos triples) y, por lo tanto, los vectores de estado se encuentran en un plano.
1.3.2.3 Descripción del algoritmo
El algoritmo vectorial que se describirá a continuación nos da la posibilidad de sintetizar un vector de referencia uref a partir de los 4 vectores de estado más cercanos, los cuales son los vértices de un tetraedro irregular [10]. Los tiempos de conmutación se hallarán sin necesidad de usar ángulos, funciones trigonométricas o cambios de coordenadas.
Se usarán 4 vectores para aproximar la tensión deseada en un ciclo de control. Éstos serán usubciclo1 (t1), usubciclo2 (t2), usubciclo3 (t3) y usubciclo4 (t4). Cada uno de los

tiempos corresponde a un subciclo de modulación e indica el tiempo de on de los IGBTS correspondientes a ese estado.
La entrada del algoritmo de modulación será un vector de referencia normalizado. Esta normalización dependerá exclusivamente de la tensión de DC y del número de niveles del convertidor. Los valores entre los que tendrá que permanecer el
vector de referencia serán � ������ y ������ . Tras la normalización el vector de referencia
deberá permanecer entre � ��� y ��� . En nuestro caso tendremos un convertidor
trinivel, por tanto permanecerá entre -1 y 1. Para evitar problemas posteriores de signos en programación, sumando a cada referencia una unidad desplazamos todas, para que los estados finales permanezcan entre 0 y 2.
En la siguiente imagen observamos los diferentes estados en los que puede encontrarse el convertidor trinivel, ya desplazados, según los diferentes niveles de DC que tengamos. 0 es el nivel más bajo, 1 la conexión al puto medio y 2 el punto más alto de DC. El orden del vector indica cada una de las fases del equipo.
Figura 8. Espacio vectorial en 3-D para un convertidor trinivel.
Los pasos a dar serán los siguientes:
1er paso.
Encontrar el sub-cubo al cual apunta el vector de referencia. El espacio vectorial de un convertidor multinivel tiene forma cúbica. Éste se divide en varios tetraedros que generan el volumen completo del cubo. Para un determinado vector de referencia en el sistema trifásico (Va, Vb, Vc) se toma la parte entera del mismo, tal que a sea la parte entera de Va, b sea la parte entera de Vb y c la de Vc. Determinando esta parte entera del vector se obtiene el origen del subcubo hacia donde apunta el vector de referencia.
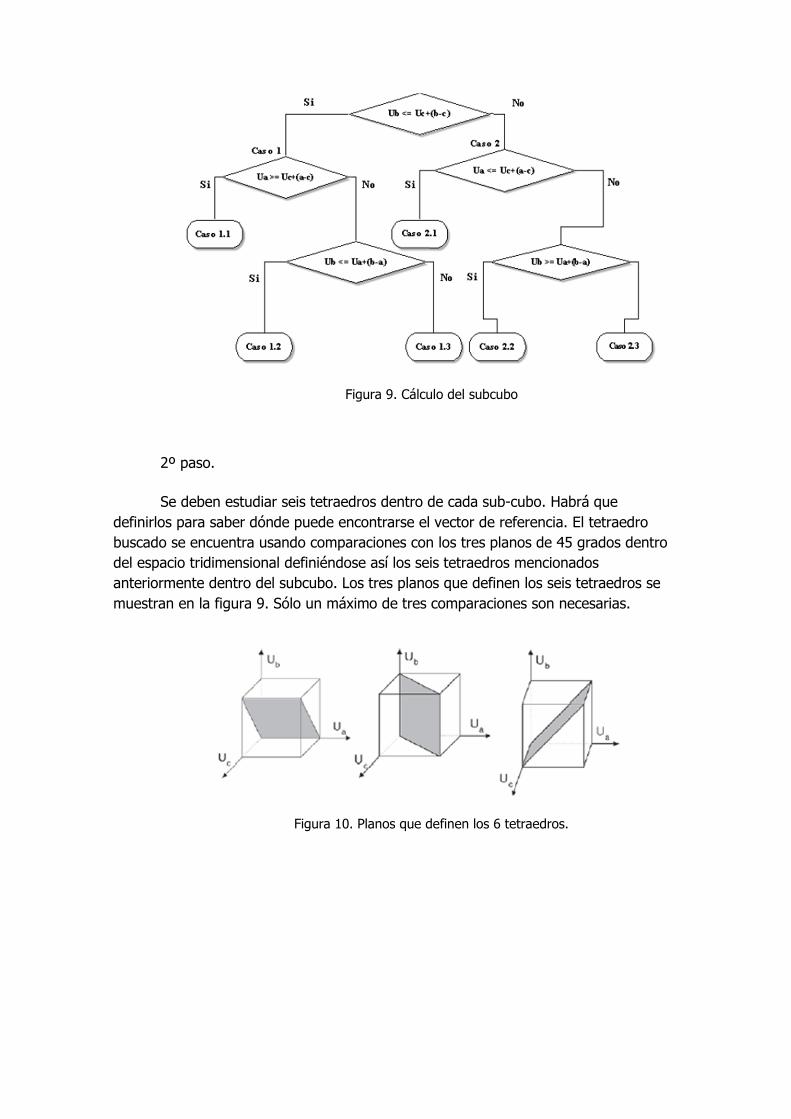
Figura 9. Cálculo del subcubo
2º paso.
Se deben estudiar seis tetraedros dentro de cada sub-cubo. Habrá que definirlos para saber dónde puede encontrarse el vector de referencia. El tetraedro buscado se encuentra usando comparaciones con los tres planos de 45 grados dentro del espacio tridimensional definiéndose así los seis tetraedros mencionados anteriormente dentro del subcubo. Los tres planos que definen los seis tetraedros se muestran en la figura 9. Sólo un máximo de tres comparaciones son necesarias.
Figura 10. Planos que definen los 6 tetraedros.
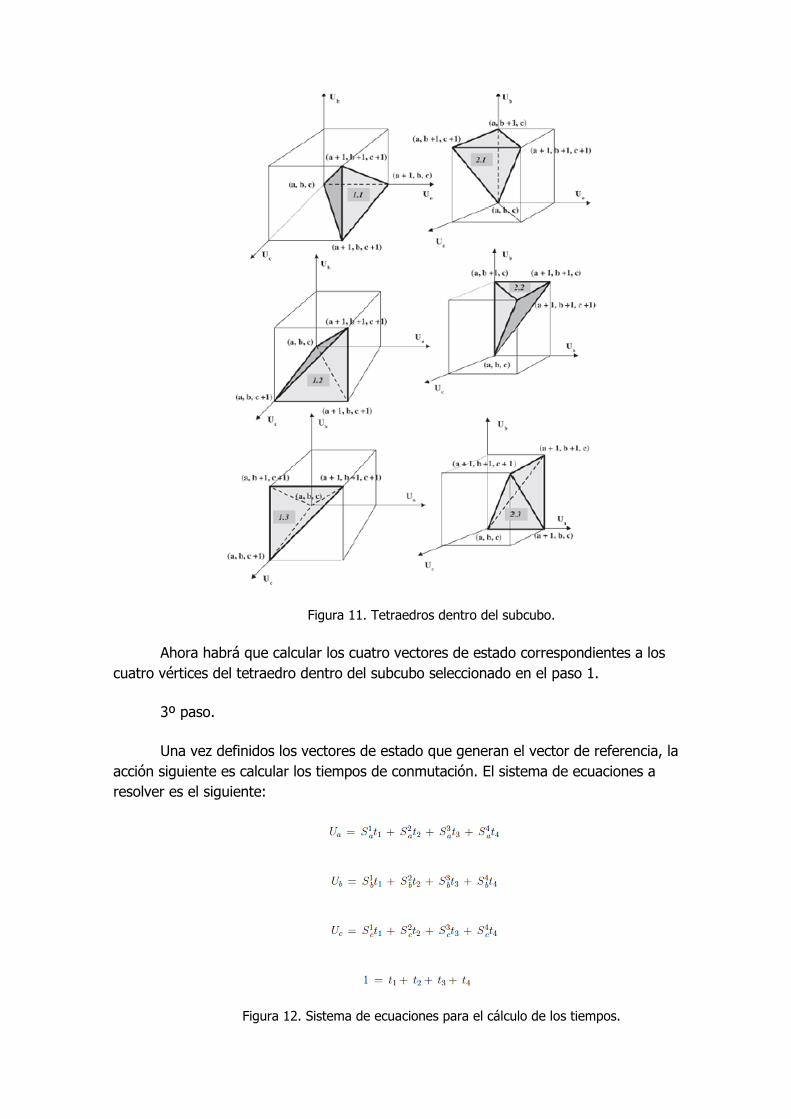
Figura 11. Tetraedros dentro del subcubo.
Ahora habrá que calcular los cuatro vectores de estado correspondientes a los cuatro vértices del tetraedro dentro del subcubo seleccionado en el paso 1.
3º paso.
Una vez definidos los vectores de estado que generan el vector de referencia, la acción siguiente es calcular los tiempos de conmutación. El sistema de ecuaciones a resolver es el siguiente:
Figura 12. Sistema de ecuaciones para el cálculo de los tiempos.

Como consecuencia, los tiempos de conmutación se calculan mediante sumas y restas, involucrando la parte entera de las coordenadas del vector de referencia y las propias coordenadas. Se observa la resolución de las mismas en la siguiente figura.
Figura 13. Tabla del cálculo de vectores de estado y tiempos de conmutación.

1.3.3 Direct Power Control.
1.1.1 1.4.3.1 Introducción.
El control directo de potencia (DPC) es una de las estrategias de control más eficientes. Está basada en el control en los valores de los errores de potencia y la posición del vector de tensión descrito en [11] y [13].
1.1.2 1.4.3.2 Descripción del modelo.
En la siguiente figura puede verse el modelo del convertidor multinivel estudiado, y en el cual se basarán las ecuaciones que describirán el control DPC.
Figura 14. Convertidor trinivel.
El convertidor está conectado a la red a través de inductancias y el DC-link está compuesto por un bus de condensadores, simplificado en los dos únicos
condensadores representados en la figura 14.

Las ecuaciones que describen el sistema serán:
v(t)=L��(�)�� + ��(�) ���2 (1)
� ������ = 12 �(�)��(�) � ����� (2) Teniendo en cuenta lo siguiente:
v(t)= �� !�"!��!# �(�) = �� �"��# �(�) = �$%$&$�# � = �' �
2 �1 �1�1 2 �1�1 �1 2 # Trasformando el sistema a las coordenadas estacionarias α y β.
()*=L �+,-�. + �)* ��� (3)
� ��� /���
2 0 = ���2 �)*��)* � ���12 (4) Estas ecuaciones son el modelo discretizado del convertidor de potencia en
coordenadas alfa-beta, donde �)* = 45)5*6. El objetivo del controlador será el siguiente:
La potencia instantánea activa p y la reactiva q deberán seguir sus referencias p* y q*. Esta estrategia de control controla indirectamente las corrientes proporcionadas por las fuentes a través de los valores instantáneos de p y q.
1.1.3 1.4.3.3 Output Regulation Subspaces (ORS)
La ORS dividirá los ejes alfa-beta en cuatro cuadrantes teniendo en cuenta el signo de la primera derivada de la potencia activa y reactiva instantánea.
Los valores de las potencias instantáneas activa y reactiva se definen como sigue:
y�=p=�)*� ∗ ()* (5)y=q=�)*� ∗ ;()*(6)
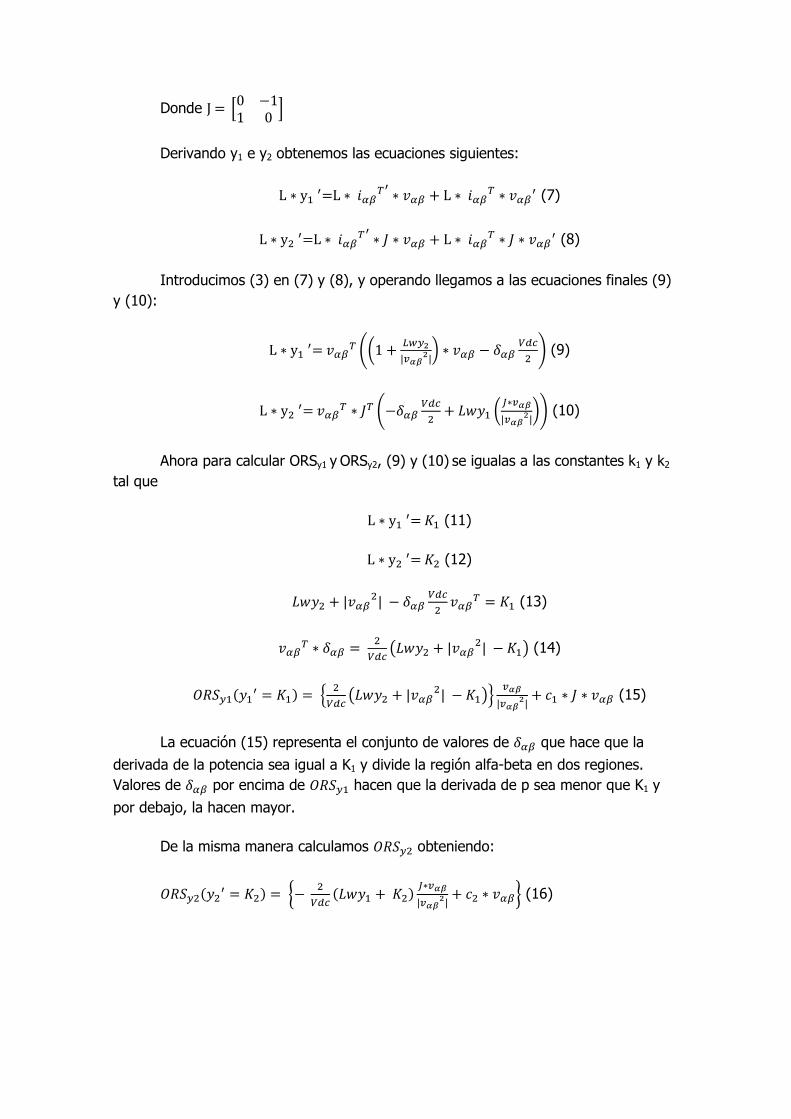
Donde J= =0 �11 0 ? Derivando y1 e y2 obtenemos las ecuaciones siguientes:
L ∗ y�@=L ∗ �)*�@ ∗ ()* + L ∗ �)*� ∗ ()*@ (7)
L ∗ y@=L ∗ �)*�@ ∗ ; ∗ ()* + L ∗ �)*� ∗ ; ∗ ()*@ (8)
Introducimos (3) en (7) y (8), y operando llegamos a las ecuaciones finales (9) y (10):
L ∗ y�@=()*� /A1 + 2BCD|F,-D|G ∗ ()* � �)* ��� 0 (9)
L ∗ y@=()*� ∗ ;� /��)* ��� + HIJ� AK∗F,-|F,-D|G0 (10)
Ahora para calcular ORSy1 y ORSy2, (9) y (10) se igualas a las constantes k1 y k2 tal que
L ∗ y�@=L� (11)
L ∗ y@=L (12)
HIJ + |()*| � �)* ��� ()*� = L� (13)
()*� ∗ �)* = ��� MHIJ + |()*| � L�N (14)
O1PC�(J�@ = L�) = Q ��� MHIJ + |()*| � L�NR F,-|F,-D|+ �� ∗ ; ∗ ()* (15)
La ecuación (15) representa el conjunto de valores de �)* que hace que la
derivada de la potencia sea igual a K1 y divide la región alfa-beta en dos regiones. Valores de �)* por encima de O1PC� hacen que la derivada de p sea menor que K1 y
por debajo, la hacen mayor.
De la misma manera calculamos O1PC obteniendo:
O1PC(J@ = L) = S� ��� (HIJ� +L) K∗F,-|F,-D|+ � ∗ ()*T (16)

Si igualamos K1 y K2 a 0 se obtienen dos líneas directas que dividen el cuadrante alfa-beta en cuatro cuadrantes como se muestra en la siguiente figura:
Figura 15. ORSy1 y ORSy2 con constantes K1 y K2 iguales a cero.

Haciendo esto, la intersección entre ambas es el punto de equilibrio en estado de régimen permanente, es decir, en este punto la demanda de potencia activa y reactiva del equipo permanece constante.
ORSXY = S Z[\ A1 � ]^_D
|`abD|G vXY �Z[\ A
]^_c|`abD|G J ∗ vXYT (17)
Esta estrategia de regulación permite diseñar un controlador para el convertidor basándonos en el DPC anteriormente explicado. Se controlará el convertidor solo con los valores de la potencia activa y reactiva instantánea sin ningún bucle interno de control considerando las ecuaciones representadas en (15) y (16). La idea básica del DPC es la elección del mejor estado de potencia entre los posibles para mantener el DC-link a tensión constante y un factor de potencia cercano a la unidad.
Utilizando el concepto ORS, un controlador DPC puede ser diseñado para tener bajo control la desventaja principal de los altos valores de inductancia. Los valores del error instantáneo de las potencias activas y reactivas son:
Perror = p –pref (18)
qerror = q –qref (19)
Donde la pref se calcula en un lazo externo de control a través de un PI y la potencia reactiva instantánea pref será cero para mantener el factor de potencia cercano a la unidad.
Según el signo del error se seleccionará un área diferente, como podemos observar en la siguiente figura:
Figura 16. Posibles áreas a seleccionar según el signo del error de potencia.
Las principales desventajas de este algoritmo son:
o La alta ganancia del control y por consiguiente los grandes valores de inductancia necesarios para conseguir la operación correcta del sistema.
o La posibilidad elegir más de un vector de posición dentro del área de selección según el signo del error de potencia.
o El estado de la potencia no tiene por qué estar siempre dentro de una de las áreas de selección.
El controlador propuesto usando ORS tiene un comportamiento como las cásicas técnicas bang-bang. Este controlador no tiene una frecuencia de conmutación y por eso se utilizará posteriormente una técnica de modulación Space Vector, la cual tiene una frecuencia de conmutación constante.
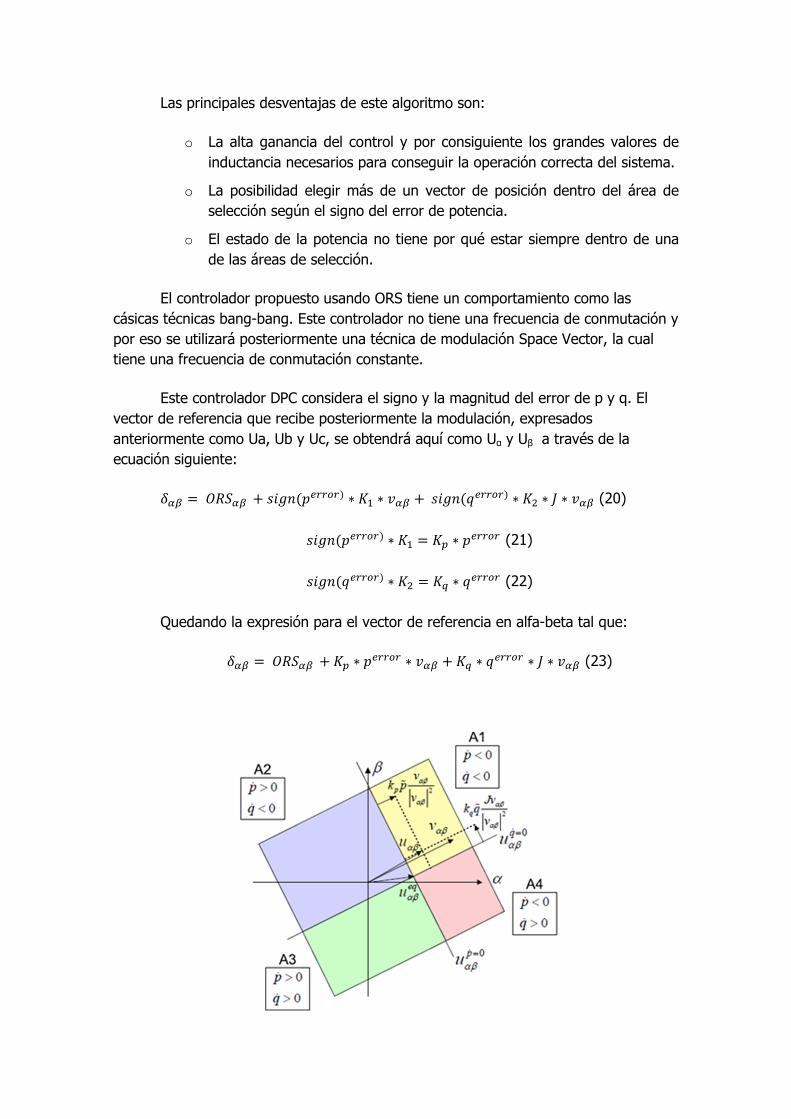
Este controlador DPC considera el signo y la magnitud del error de p y q. El vector de referencia que recibe posteriormente la modulación, expresados anteriormente como Ua, Ub y Uc, se obtendrá aquí como Uα y Uβ a través de la ecuación siguiente:
�)* �O1P)* � &�d!�efgg�g ∗ L� ∗ ()* � &�d!�hfgg�g ∗ L ∗ ; ∗ ()* (20)
&�d!�efgg�g ∗ L� � Li ∗ efgg�g (21)
&�d!�hfgg�g ∗ L � Lj ∗ hfgg�g (22)
Quedando la expresión para el vector de referencia en alfa-beta tal que:
�)* �O1P)* � Li ∗ efgg�g ∗ ()* � Lj ∗ hfgg�g ∗ ; ∗ ()* (23)

Figura 17. Descomposición del vector de referencia final.
El primer término es en el que las potencias permanecen constantes. El segundo fuerza que la potencia activa crezca o decrezca según el valor del error. El tercero, lo mismo que el segundo pero para potencia reactiva.
Utilizando estas ecuaciones, el vector de referencia se localiza en el área adecuada y tiene la magnitud necesaria para minimizar los errores de potencia activa y reactiva. Una vez generado este vector, se realiza la transformada alfa-beta a abc y se le pasa como vector de referencia a la técnica de modulación explicada en el apartado anterior (SVM).


















