2do Laboratorio Mc516 Finalizado
18
TRACCION CON DEFORMACIÓN TÉRMICA En el espejo del auto, cuyo espesor es una sección circular variable a lo largo del sujetador, calculamos los esfuerzos en cada elemento finito y la reacción en el apoyo. Para realizar lo podemos dividir en 7 elementos finitos, EL material y peso están en el anexo. 1. MODELADO DEL CUERPO REAL Se tendrá en cuenta que al momento de aplicar el M.E.F 1
-
Upload
eddy-illanes-andaluz -
Category
Documents
-
view
29 -
download
0
Transcript of 2do Laboratorio Mc516 Finalizado

TRACCION CON DEFORMACIÓN TÉRMICA
En el espejo del auto, cuyo espesor es una sección circular variable a
lo largo del sujetador, calculamos los esfuerzos en cada elemento
finito y la reacción en el apoyo. Para realizar lo podemos dividir en 7
elementos finitos, EL material y peso están en el anexo.
1. MODELADO DEL
CUERPO REAL
Se tendrá en cuenta
que al momento de
aplicar el M.E.F sólo se
hará a la parte del
cuerpo en sí mas no
de la placa de la base.
Se hace su
dimensionado y su
posterior división para
aplicar el método
citado
1

Para fines de cálculo lo dividimos a elementos como se muestra
Para hallar cada uno de los radios con los que se trabajará se
dividirá la primera parte en 3 elementos finitos de altura 20 mm
cada uno y se verá que tiene la forma de un tronco de cono; luego
para su discretización se trabajará como un cilindro manteniendo
el volumen de cada tronco de cono igual a un volumen de cilindro
con la finalidad de hallar el radio.
Engeneral cuandounoquieremodelar un troncode conoauna forma
cilindrica ,deberá hacer el cambiorespectivo
πxhx (R2+r2+Rxr )3
=πx (R ´ )2 xh
Donde R ´=radio del cilindromodelado .
1er tramo:
Reemplazando :πx 20 x(452+(125
3 )2
+45 x ( 1253 ))
3=πx (R´ )2 x 20
Donde: R´ = 43.344 mm
Así podemos calcular los demás radios:
R´ = 40.01157 mm
R´ = 36.67929 mm
2do tramo:
Reemplazando :πx 5 x (352+(31.25 )2+35 x (31.25 ) )
3=πx (R ´ )2 x5
Donde: R´ = 33.14268 mm
Así podemos calcular los demás radios:
R´ = 29.39494 mm
R´ = 25.6478 mm
R´ = 21.9017 mm
Por último mostramos la discretización en forma de cilindros,
facilitando la aplicación del M.E.F. para nuestro problema.
2

Considerar:
PA = 10N
t (espesor) = Circular variable a lo largo del sujetador
E = 1.19x103 N/mm2
Y = 0.9g/cm3 = 0.9x 9.81 x10-6 N/mm3
=8.829x10-6N/mm3
∆T (Cambio de Temperatura) =85ºC
α = 11*10-6 ºC-1
Cuadro de conectividad:
E
NODOS GDL le
(mm)
Ae
(mm2)(1) (2) 1 2
1 1 2 1 2 20 5902.117
2 2 3 2 3 20 5029.457
3 3 4 3 4 20 4226.605
4 4 5 4 5 5 3450.842
5 5 6 5 6 5 2714.532
6 6 7 6 7 5 2066.57
7 7 8 7 8 5 1506.973
2. GRADOS DE LIBERTAD NODALES (Vector
Desplazamiento)
3

A través
del
grafico
se
muestran los grados de libertad nodales globales:
Luego el vector de desplazamiento será:
Q∫¿ =¿ [0 ¿ ] [Q 2¿ ] [Q3¿ ] [Q4 ¿ ] [Q5¿ ] [Q6 ¿ ] [ Q7¿ ] ¿
¿¿¿¿
Donde Q1= 0 El objeto que sostiene al espejo esta empotrada y los
demás desplazamientos son incógnitas que tendrán que ser
calculadas.
4

3. VECTOR CARGA
Analizando las fuerzas en cada elemento finito:
Se hallará la carga existente en cada elemento finito.
5

F11 =
y ( Axl )12
+R1 −(E∗α∗A 1∗ΔT )= R1 −40615 ,42N
F21 =
y ( Axl )12
+(E∗α∗A 1∗ΔT )= 40596 ,46 N
F22 =
y (Axl )22
−(E∗α∗A2∗ΔT )=−34593 ,167 N
F32 =
y (Axl )22
+P+(E∗α∗A2∗ΔT )=34604 ,055 N
F33 =
y (Axl )32
−(E∗α∗A 3∗ΔT )=−29071,0613 N
F43 =
y ( Axl )32
+(E∗α∗A 3∗ΔT )=29071,80767 N
F44 =
y ( Axl )42
−(E∗α∗A 4∗ΔT )=−23735 ,505 N
F54 =
y ( Axl )42
+(E∗α∗A 4∗ΔT )=23735 ,6576 N
F55 =
y (Axl )52
−(E∗α∗A5∗ΔT )=−18671 ,034 N
F65 =
y (Axl )52
+(E∗α∗A5∗ΔT )= 18671 ,1539N
F66 =
y (Axl )62
−(E∗α∗A6∗ΔT )=−14214 ,236 N
F76 =
y (Axl )62
+(E∗α∗A 6∗ΔT )=14214 ,3273 N
F77 =
y (Axl )72
−(E∗α∗A 7∗ΔT )=−10365 ,2284 N
F87 =
y (Axl )72
+(E∗α∗A7∗ΔT )= 10365 ,294 N
6

Análisis de las cargas a nivel de cada elemento finito:
F1 = F11 = R1−40615 ,42 N
F2 = F21 + F2
2 = 6003 ,293 N
F3 = F32 + F3
3 =5532 ,9937 N
F4 = F43 + F4
4 = 5336 ,302678 N
F5 = F54 + F5
5 =5064 ,6236 N
F6 = F65 + F6
6 =4456 ,9179 N
F7 = F76 + F7
7 = 3849 ,0989 N
F8 = F87 = 10365 ,294 N
Ahora en su forma matricial lo tendremos:
F1 = ¿ [F 1¿ ] [F 2¿ ] [ F3 ¿ ] [F 4 ¿ ] [F 5¿ ] [ F6 ¿ ] [F 7 ¿ ]¿¿
¿
7

4.- MATRIZ DE RIGIDEZ
A continuación pasamos a calcular la matriz de Rigidez Global, que
esta determinada por la siguiente ecuación:
Ksr=( EAl )e [ 1 −1−1 1 ].
K
i∫¿= (AEl )1 [1 −1 0 0 0 0 0 0
−1 1 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
]¿
+ ( AEl )2 [
0 0 0 0 0 0 0 00 1 −1 0 0 0 0 00 −1 1 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
]+ ( AEl )
3 [0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 1 −1 0 0 0 00 0 −1 1 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
]
+ ( AEl )4 [
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 1 −1 0 0 00 0 0 −1 1 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
]+ ( AEl )
5 [0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 1 −1 0 00 0 0 0 −1 1 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0
]+ ( AEl )6 [
0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 1 −1 00 0 0 0 0 −1 1 00 0 0 0 0 0 0 0
]+ ( AEl )
7 [0 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 1 −10 0 0 0 0 0 −1 1
]
8

Reemplazando para los valores calculados y utilizando la tabla de
Conectividad obtenemos:
Finalmente:
K
i∫¿= 103
x [351. 175 −351 .175 0 0 0 0 0 0−351 .175 650. 427 −299 .252 0 0 0 0 0
0 −299 .252 551. 004 −251 .842 0 0 0 00 0 −251 .842 1072. 782 −821 .3 0 0 00 0 0 −821 .3 1467. 358 −646. 058 0 00 0 0 0 −646 .058 1137 . 901 −491. 843 00 0 0 0 0 −491. 843 850.502 −358 .6590 0 0 0 0 0 −358. 659 358. 659
] Nmm
¿
5.- ECUACIONES DE RIGIDEZ Y CONDICIONES DE CONTORNO
La ecuación de rigidez esta determinada por la siguiente ecuación:
F i = Ki∫ Q∫¿
¿
Lo que con nuestros valores calculados tenemos:
Para obtener los desplazamientos tomamos la siguiente submatriz:
Por propiedades de matrices
9
[R1−40615. 426003 .2935532 .99375336 .3025064 .62364456 .91793849 .098910365 .294
] = 103 x [351 .175 −351. 175 0 0 0 0 0 0−351 .175 650 . 427 −299 . 522 0 0 0 0 0
0 −299. 252 551 .004 −251. 842 0 0 0 00 0 −251 . 842 1072.782 −821.3 0 0 00 0 0 −821. 3 1467 . 358 −646. 058 0 00 0 0 0 −646 . 058 1137 .901 −491 .843 00 0 0 0 0 −491. 843 850 . 502 −358 .6590 0 0 0 0 0 −358 .659 358. 659
] [0Q 2Q 3Q 4Q 5Q 6Q7Q8
]
¿ [6003 .293 ¿ ] [5532.9937 ¿ ] [ 5336. 3026 ¿ ] [5064 .6236 ¿ ] [ 4456 . 9179 ¿ ] [ 3849 . 0989 ¿ ]¿¿
¿= 103 x [650. 427 −299 . 252 0 0 0 0 0−299 .252 551 . 004 −251 .842 0 0 0 0
0 −251 . 842 1072. 782 −821. 3 0 0 00 0 −821 .3 1467 .358 −646 .058 0 00 0 0 −646. 058 1137 . 901 −491 . 843 00 0 0 0 −491 .843 850. 502 −358 .6590 0 0 0 0 −358 .659 358 .659
] ¿ [Q 2¿ ] [Q3 ¿ ] [Q 4 ¿ ] [Q 5 ¿ ] [Q 6 ¿ ] [Q 7 ¿ ] ¿¿
¿

Resolviendo este sistema de ecuaciones obtenemos:
Y para obtener la reacción en el empotramiento tómanos la
siguiente submatriz:
Resolviendo obtenemos:
[ R1−40615. 42 ] = 103 x [ 351 .175 −351. 175 0 0 0 0 0 0 ]¿¿R1=−33 .771625 N
Haciendo un análisis de la reacción, tendremos que:
R1+ P + W = 0
Donde: R1: Reacción
P: Carga aplicada
W: peso del sujetador
W= Peso del sujetador: V*Y
Remplazando:
W= 8.829*10^ (-6)*2.6917*10^6 = 23.7651N
P= 10N
10
Q2 = 0 .115695 mmQ3 =0 . 2314041 mmQ4 =0 .347339 mm
Q5 =0 . 376239 mmQ6 =0 . 405139 mmQ7 =0 . 43404 mmQ8 =0 . 46294025 mm

Luego: W+P-R1=33.7651-33.771625 = -0.006525
Como se puede ver, el equilibrio tiende a 0; no es exacto debido a la
toma de decimales para el cálculo de las matrices.
6.- ESFUERZOS TERMOMECÁNICOS
Para calcular los valores de los esfuerzos por elemento, aplicamos
la siguiente ecuación:
σ e =( El )e
[−1 1 ] ¿ [ Qi ¿ ] ¿¿
¿
Y obtenemos lo siguiente:
σ 1 = ( 1. 19 x 103
20 )1
[−1 1 ] ¿ [ 0 ¿ ]¿¿
¿
σ 2 = ( 1. 19 x 103
20 )2
[−1 1 ] ¿ [ 0 . 115695 ¿ ] ¿¿
¿
σ 3 = ( 1 .19 x 103
20 )3
[−1 1 ] ¿ [0 . 2314041¿ ]¿¿
¿
σ 4 = (1 .19 x 103¿5 ¿¿
¿)4
[−1 1 ] ¿ [ 0 .347339 ¿ ]¿¿
¿
σ 5 = ( 1 .19 x 103
5 )3
[−1 1 ] ¿ [0 . 376239 ¿ ]¿¿
¿
σ 6 = ( 1 .19 x 103
5 )6
[−1 1 ] ¿ [ 0 . 405139 ¿ ]¿¿
¿
σ 7 = ( 1 .19 x 103
5 )7
[−1 1 ] ¿ [0 .43404012 ¿ ] ¿¿
¿
11

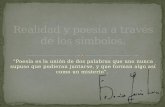
7.- RESULTADOS
GENERALES
Finalmente, los resultados son
mostrados en la siguiente tabla:
12
R1 =−33 .771625 N
σ 1 = 0 .0056525N
mm2
σ2 = 0 .0649145N
mm2
σ3 =0. 01992655N
mm2
σ 4 =0 . 0010132N
mm2
σ5 =0 .00082354N
mm2
σ 6 =0 . 00026656N
mm2
σ7 =0.000030942N
mm2

8.- DEMOSTRACIONES:
Matriz de rigidez
En el modelo el 1er teorema de Casstigliano
Fi=∂π∂Qi
Q: Desplazamiento
La matriz de rigidez se define como
Kij= ∂Fi∂Qj
= ∂2π∂Qi .∂Qi
La variación de carga Fi en cierto grado de libertad por la variación unitaria de un
deslazamiento Qj en otro grado de libertad
De la ecuación anterior se tiene
dFi= ∂2π∂Qi . ∂Qi
. dQj
En un elemento finito .numéricamente
13
10 20 30 40 50 60 70 80 900
0.01
0.02
0.03
0.04
0.05
0.06
0.07
Esfuerzo Termomecánico vs Longitud del sujetador
Esfuerzo termomecánico vs Longitud del sujetador
Longitud del sujetador (mm)
Esfu
erzo
term
omec
ánico
(N/m
m2)

FSe=( ∂2πe
∂qs .∂qr. dQr)
Ahora aplicando la sumatoria de todos los elementos
∑ Fe s =(∑ ∂2π e
∂qs .∂qr.dQr)
Se puede escribir
Fi=∑e=1
e
Ksr .Qj
Finalmente queda
F i=K ij∗QJ
Ecuación de rigidez en el modelo; siendo:
K iJ=∑e=1
e
K SRe
Uniendo luegomediantela concetividad dematricesde rigidez locales .
MATRICES DE RIGIDEZ LOCALES
Ksr= ∂2π e
∂qs .∂qr.
kSr=[ ∂2πe
∂q1∂2π e
∂q1.∂q2∂2πe
∂q2.∂q1∂2π e
∂q2]
Realizando la derivación sabiendo πe=( EA2l )e
. [q12+q22−2q 1q 2 ]
Ksr=( EAl )e [ 1 −1−1 1 ].
Deformacion
ϵx=∂u∂x
+ϵ 0=∂u∂ϵ
.∂ ϵ∂ x
+ϵ 0
Donde numéricamente
u=qrNr=(1−ϵ2 )q1+( 1+ϵ
2 )q 2
14

∂u∂ϵ
=12. [q2−q1 ]
Por lo tanto
ϵ e= 1
le. [q2−q1 ]
Entonces se sabe
σ = E * (ϵ−ϵ 0); pero ϵ 0=α∗∆T
Por último remplazando para un elemento finito:
σ¿( El ). [−1 1 ][q1q2]−E∗α∗∆T
9. DIAGRAMA DE FLUJO
INICIO
INGRESO DE DATOSCONSTANTES : (E, α, Y)
VECTORES: L, A, P
CALCULO DE VECTORES
15

F=
[(AL)1 γ
2+R1−EαΔTA1
( AL)1γ2
+( AL)2 γ
2+EαΔTA1−EαΔTA2
(AL )2γ
2+( AL)3γ
2+EαΔTA2−EαΔTA 3+P
(AL)3 γ2
+(AL )4 γ
2+EαΔTA 3−EαΔTA 4
(AL)4γ2
+(AL)5 γ
2+EαΔTA 4−EαΔTA 5
( AL)5γ2
+( AL)6 γ
2+EαΔTA 5−EαΔTA6
(AL )6γ2
+( AL)7 γ
2+EαΔTA6−EαΔTA7
(AL )7 γ2
+EαΔTA 7
] ; K=
∑ Ksr=∑1
7
( EAl )e
[ 1 −1−1 1 ]
TRAFORMACION DE ECUACION MATRICIAL
[AL1 γ
2AL2γ
2+ AL1γ
2AL3 γ
2+ AL2 γ
2+PA
AL3 γ2
]=
[−1 −EA1
L10 0
0EA2
L2+EA1
L1−
EA2
L20
0 −EA2
L2
EA3
L3+EA2
L2−
EA3
L3
0 0 − EA3
L3
EA3
L3
][R1
Q2
Q3
Q4]
IMPRESIÓN DE RESULTADOSR1 , Q2 , Q3 , Q4 , Q5 , Q6 , Q7 , Q8
FIN
10. CONCLUSIONES
Se puede apreciar que las deformaciones están en orden de decimas de milímetro lo cual indica que hay una mayor deformación a lo largo del sujetador.
Los esfuerzos son positivos, lo que indica esfuerzos de compresión para nuestro sistema de referencia.
Se verifica la condición de equilibrio, lo cual da validez al método de solución escogido para nuestro problema.
16