6. ESTABILIDAD DE SISTEMAS NO LINEALES...SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág.6-2 En el...
28
SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-1 6. ESTABILIDAD DE SISTEMAS NO LINEALES 6.1 Introducción En el capítulo precedente, dedicado a sistemas discontínuos, se ha considerado el funciona- miento en el dominio del tiempo de elementos no lineales (biestables y triestables, con o sin histéresis) empleados como controladores conmutantes. En el presente capítulo se analizarán condiciones de estabilidad aplicables en el dominio de frecuencia para dispositivos con comportamientos no lineales de todo tipo: saturación, umbral o zona muerta, histéresis, fricción seca, conmutadores de dos o tres estados y, en general, componentes con características de entrada-salida de todo tipo, simétricas o asimétricas. 6.2 Funciones Descriptivas. Las funciones descriptivas tienen por objeto comprobar aproximadamente la estabilidad de un sistema realimentado no lineal. Por tratarse de un método aproximado, deberán ser verificadas en cada caso individual las condiciones que posibilitan su aplicación, aunque podemos adelantar que los resultados obtenidos son asombrosamente precisos en muchos casos prácticos. Aunque en un lazo de control pueden encontrarse presentes diversos componentes que exhiban una característica de transferencia no lineal, es casi siempre posible identificar una única no linealidad principal: como ejemplo podemos considerar un controlador discontinuo no linealizable por accionamiento periódico, tal como alguno de los biestables analizados en el punto 5.2. Se puede entonces considerar el lazo de control subdividido en dos partes: una parte lineal dependiente de la frecuencia y una parte no lineal e independiente de la frecuencia 1 . La Fig. 6.1(a) muestra un ejemplo, donde la no linealidad está representada por un controlador triestable. El diagrama de bloques puede llevarse a la forma de la Fig. 6.1(b) desplazando y reordenando los componentes. F1(s) F2(s) F3(s) F1(s) F2(s) F1F3(s) F(s) P Fig. 6.1. Diagrama en bloques de un lazo no lineal. 1 Lo cual equivale a decir que la respuesta del elemento no lineal es instantánea.
Transcript of 6. ESTABILIDAD DE SISTEMAS NO LINEALES...SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág.6-2 En el...

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-1
6. ESTABILIDAD DE SISTEMAS NO LINEALES
6.1 Introducción
En el capítulo precedente, dedicado a sistemas discontínuos, se ha considerado el funciona-
miento en el dominio del tiempo de elementos no lineales (biestables y triestables, con o sin
histéresis) empleados como controladores conmutantes.
En el presente capítulo se analizarán condiciones de estabilidad aplicables en el dominio de
frecuencia para dispositivos con comportamientos no lineales de todo tipo: saturación, umbral o
zona muerta, histéresis, fricción seca, conmutadores de dos o tres estados y, en general,
componentes con características de entrada-salida de todo tipo, simétricas o asimétricas.
6.2 Funciones Descriptivas.
Las funciones descriptivas tienen por objeto comprobar aproximadamente la estabilidad de un
sistema realimentado no lineal. Por tratarse de un método aproximado, deberán ser verificadas
en cada caso individual las condiciones que posibilitan su aplicación, aunque podemos adelantar
que los resultados obtenidos son asombrosamente precisos en muchos casos prácticos.
Aunque en un lazo de control pueden encontrarse presentes diversos componentes que exhiban
una característica de transferencia no lineal, es casi siempre posible identificar una única no
linealidad principal: como ejemplo podemos considerar un controlador discontinuo no
linealizable por accionamiento periódico, tal como alguno de los biestables analizados en el
punto 5.2.
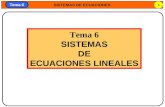
Se puede entonces considerar el lazo de control subdividido en dos partes: una parte lineal
dependiente de la frecuencia y una parte no lineal e independiente de la frecuencia1. La Fig.
6.1(a) muestra un ejemplo, donde la no linealidad está representada por un controlador triestable.
El diagrama de bloques puede llevarse a la forma de la Fig. 6.1(b) desplazando y reordenando
los componentes.
F1(s) F2(s)
F3(s)
F1(s) F2(s) F1F3(s)
F(s)
P
Fig. 6.1. Diagrama en bloques de un lazo no lineal.
1 Lo cual equivale a decir que la respuesta del elemento no lineal es instantánea.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-2
En el proceso de modificación del diagrama de bloques habrá de prestarse particular atención a
las señales de entrada y salida de la no linealidad, las que deberán permanecer inalteradas.
Obsérvese que una modificación de la secuencia de componentes lineales y no lineales puede
alterar la forma de dichas señales y resultar por lo tanto inadmisible.
Con referencia a la Fig. 6.1(b) y partiendo del supuesto que la función de transferencia F1(s) sea
de por sí estable, la estabilidad del sistema estará definida por el comportamiento del lazo
realimentado que incluye la no linealidad. Para llevar a cabo este análisis imaginaremos abierto
el lazo en el punto P y excitado por una señal periódica senoidal de amplitud A aplicada a la
entrada del elemento no lineal:
1( ) siny t A t . (6.1)
Suponiendo que el elemento no lineal posee una característica de transferencia simétrica respecto
del origen (simetría impar), la variable de salida puede expresarse como una serie de Fourier sin
componente continua y que posee únicamente armónicas de orden impar
2
1,3,5,...
( ) sin cosn n
n
y t a n t b n t
(6.2)
Siendo T=2 /, los coeficientes de Fourier se calculan mediante las expresiones:
20
2( )sin
T
na y t n t dtT
(6.3)
20
2( )cos
T
nb y t n t dtT
(6.4)
La serie de Fourier también se puede expresar en forma polar (módulo y fase):
2 2
1,3,5,...
ˆ( ) sinn n
n
y t y n t
(6.5)
siendo 2 2
2ˆ ; tan n
n n n n
n
by a b
a ,
donde las amplitudes y ángulos de fase de las oscilaciones componentes son funciones de la
amplitud de la excitación,
2ˆ ( ); ( )n ny g A h A . (6.6)
La (6.5) reescrita en forma compleja queda
2 2 2
1,3,5,... 1,3,5,...
ˆ ˆ( ) Im Imn nj n t j jn t
n n
n n
y t y e y e e
(6.7)

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-3
Con estas consideraciones, también la variable de salida x6 del sistema lineal puede se escrita
como una serie de Fourier,
6 2
1
ˆ( ) Im ( )nj jn t
n
n
x t y e F jn e
, (6.8)
siendo F(jn) la respuesta en frecuencia de la parte lineal,
( ) ( ) njF jn F jn e
. (6.9)
Si F(j) es una función pasa bajos, cuyo módulo sea monótonamente decreciente con la
frecuencia, entonces las amplitudes de las armónicas presentes en x6 resultan pequeñas y
pueden ser despreciadas frente a la componente fundamental
1
6 21ˆ( ) Im ( )
j j tx t y e F j e . (6.10)
Si, siguiendo lo acostumbrado en sistemas lineales, consideramos que a una frecuencia dada la
salida de un elemento es igual a la amplitud de entrada multiplicada por una cierta ganancia,
podemos escribir:
1 12121
ˆˆ ( ), es decir ( )
j jyy e A N A N A e
A
(6.11)
entonces la (6.10) se convierte en:
6( ) Im ( ) ( ) j tx t N A F j A e . (6.12)
N(A) representa la relación de entrada-salida en régimen senoidal del elemento no lineal. La
relación N(A) es independiente de la frecuencia y solamente depende de la amplitud de la
excitación, y recibe el nombre de función descriptiva2 del elemento no lineal.
Con las precedentes suposiciones puede representarse el lazo cerrado de la Fig. 6.1(b) como un
diagrama de bloques cuasi lineal.
N(A) F(s)
Fig. 6.2. Diagrama de bloques cuasi lineal.
2 La designación función descriptiva es una simple traducción de la expresión anglosajona describing function, una
designación puramente convencional. Es más, existe una multiplicidad de funciones descriptivas: además de la que
acabamos de presentar y que podríamos más precisamente definir como función descriptiva para entrada
sinusoidal, existen funciones descriptivas para diferentes clases de entradas y entre éstas poseen particular interés las
funciones descriptivas para entradas aleatorias, que varían de acuerdo a la distribución probabilística considerada.
Los interesados en el tema pueden consultar el artículo Describing Functions de James A. Taylor en la Electrical
Engineering Encyclopedia, John Wiley & Sons, New York, 1999; el artículo también se encuentra disponible
gratuitamente en la web.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-4
Esta representación es solamente válida para la excitación senoidal supuesta, es decir para s =
j. La respuesta de lazo cerrado en el dominio de frecuencias es:
6
5
( ) ( ) ( ) ( )
1( ) 1 ( ) ( )( )
( )
X j N A F j F j
X j N A F jF j
N A
. (6.13)
La oscilación y1(t) que hemos introducido para deducir la función descriptiva, aparece de por sí
y sin necesidad de una excitación externa, cuando el sistema realimentado se encuentra en el
límite de estabilidad (oscilación automantenida). La condición pertinente se deduce de (6.13)
1 1
( ) 0 o bien ( )( ) ( )
F j F jN A N A
(6.14)
jIm
Re
F(j)
–1/N(A)
A
oscilación estable
oscilación inestable
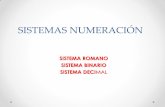
Fig. 6.3. Aplicación de la Ec. (6.14).
Obsérvese que para N(A) =
1 aparece como caso particular de (6.14) el límite de estabilidad de
un sistema lineal (criterio de Nyquist). Así en general el análisis de estabilidad no se realiza con
respecto del “punto crítico” F =
–1 sino respecto de –1/N(A), que corresponde a una curva
compleja parametrizada en valores de amplitud A; el “punto crítico” resulta entonces
dependiente de la amplitud de la oscilación. En la figura 6.3 se ejemplifica gráficamente lo que
se acaba de expresar.
Reiteraremos una vez más los supuestos en que se basa el análisis por función descriptiva
(también denominada aproximación de primera armónica), cuya validez deberá ser verificada en
cada caso particular a fin de no extraer conclusiones erróneas:
I. La característica de transferencia del elemento no lineal posee simetría impar (o simetría
respecto del origen).
II. La parte lineal del sistema posee respuesta pasa bajos (respuesta en frecuencia
monótonamente decreciente). Este supuesto se verifica con seguridad si el grado del
denominador de F(s) es por lo menos mayor en dos unidades al grado de su numerador.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-5
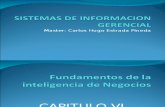
III. La frecuencia de oscilación de ciclo límite (si éste existe) se encuentra en las cercanías o es
mayor que la frecuencia de corte de la respuesta en frecuencia de los elementos lineales del
lazo de control. Esta suposición tiene por objeto asegurar que las armónicas de orden
superior presentes a la salida del elemento no lineal sean suficientemente atenuadas por los
elementos lineales. Lamentablemente este supuesto no puede verificarse a priori sino que
sólo puede constatarse su cumplimiento una vez calculada la frecuencia de las oscilaciones
automantenidas.
db
( )F j
CL
CL3
Cumple con III
db
( )F j
CL CL3
No cumple con III
Fig. 6.4. Visualización del supuesto III.
IV. Se cumple que
( )
( ) con 0( )
mT s
m
P sF s e T
Q s
encontrándose todas las raíces de Q(s) a la izquierda del eje j en el plano s a menos de
una única raíz que puede encontrarse sobre el origen de dicho plano (es decir que todos los
polos son estables).
Mediante algunos ejemplos veremos el cálculo de funciones descriptivas y su aplicación
práctica.
6.2.1. Cálculo de la función descriptiva de la no linealidad de saturación (limitador)
y2 y2=f(y1)
y1
y1
y10 –y10
y20
–y20
Fig. 6.5. No linealidad de saturación.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-6
Para el cálculo de la función descriptiva N(A) basta considerar dos rangos para la amplitud de la
señal de entrada y1(t) =A sin( t). Como la característica de transferencia es unívoca y no exhibe
histéresis, se cumple en este caso que b1 = 0 (la componente coseno es nula).
Para A< y10
20 202 1 1
10 10
( ) ( ) ( ) siny y
y t f y t y t A ty y
(6.15)
201
010
2sin sin
T ya A t t dt
T y (6.16)
2
2201
010
1y sustituyendo sin
yt a A d
y
(6.17)
2 1 1recordando: sin sin 2
2 4d
201
10
resulta y
a Ay
(6.18)
con lo cual la función descriptiva vale:
201
10
yaN A
A y (6.19)
Para A> y10 se divide la onda de y2(t) en seis tramos, para cada uno de los cuales se puede
determinar una expresión para las integrales parciales que definen los coeficientes de
Fourier:
Fig. 6.6. Efecto de la saturación para A > y10.
En los tramos I, III, IV y VI vale la expresión (6.15) que repetimos a continuación:
202 1
10
( ) ( ) siny
y t f y t A ty
y2

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-7
en los tramos II y V el dispositivo se encuentra saturado, con lo que y2(t) resulta constante
20
2
20
tramo II( )
tramo V
yy t
y
(6.20)
De acuerdo a lo precedente se obtiene para los coeficientes de Fourier:
1 1
1
220 21 20
010
24 sin 2 sin
Tt t
t
ya A t dt y t dt
T y
(6.21)
1 1
1
2201 20
010
1y sustituyendo 4 sin 2 sin
yt a A d y d
y
(6.22)
siendo 101 arcsin
y
A
con lo que finalmente resulta para la función descriptiva:
20 10 20 101
10
2arcsin cos arcsin
y y y yaN A
A y A A A
(6.23)
Nótese que en el límite entre los tramos I y II las expresiones (6.19) y (6.23) dan el mismo valor.
En definitiva, la no linealidad de saturación tiene la siguiente función descriptiva
2010
10
20 10 20 1010
10
para
2arcsin cos arcsin
yA y
yN A
y y y yA y
y A A A
(6.24)
6.2.2. Característica de transferencia con saturación y zona muerta.
Sea un elemento no lineal cuya característica de transferencia se muestra en la Fig. 5.37(a).
Consta de una zona muerta de amplitud 2 y una característica lineal que alcanza la saturación
(y20) para una entrada de amplitud A =
y10.
Si =
y10
=
0 la no linealidad corresponde a un elemento biestable ideal, mientras que si en
cambio es =
y10, estaríamos en presencia de un conmutador triestable ideal. Por último si fuera
simplemente =
0, la no linealidad correspondería a un elemento proporcional con saturación.
La Fig. 5.37(b) muestra la salida y2(t) para una excitación senoidal. Debido a la zona muerta, si
la entrada posee pequeña amplitud, la salida aparecerá con la forma de ‘colinas’ separadas. Para
amplitudes crecientes de la excitación, el andar de y2(t) tenderá a una oscilación rectangular. La

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-8
ganancia de primera armónica será entonces baja tanto para pequeñas como para grandes
amplitudes de la entrada senoidal.
A
A A
conmutador biestable ideal
Fig. 6.7. Zona muerta y saturación. Para = 0 se tiene la no linealidad de saturación.
Si es simultáneamente = y10 = 0 se tiene un conmutador biestable.
Para = y10 > 0 la no linealidad corresponde a un triestable.
En razón de que la característica de transferencia es unívoca con simetría impar, la salida y2(t)
responderá tan solo con componentes senos a una entrada sinusoidal, siendo nulas las
componentes en cosenos. Consecuentemente no existirá desfasaje entre la entrada y la primera
armónica de la salida, por lo que la función descriptiva correspondiente asumirá únicamente
valores reales.
Para evaluar la función descriptiva, partimos de la formulación de Fourier para la primera
armónica de la salida, la que deberá ser calculada por tramos, empleando el cambio de variable
t = . Por razones de simetría bastará calcular los coeficientes de Fourier sobre un cuarto de la
onda de salida de la no linealidad
2
1 2
0
4( ) sin( )a y d
(6.25)
En el análisis se distinguen tres posibles casos:
Para A< la situación es trivial: si la amplitud de entrada no alcanza el valor del umbral la salida es nula y por consiguiente a1 = 0, con lo que N(A) también es nula.
Para < A < y10
202 1 1
10
( ) sin( ) ; para siendo arcsin y
y Ay A
(6.26)

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-9
1
2
201
10
4sin( ) sin( )
ya A d
y
(6.27)
y resolviendo la integral se obtiene
2011 1 1
10
4( ) sin(2 ) cos( )
2 2 4
ya A AN A
A A y
(6.28)
Para A > y10
2
1 2
2
201 20
10
4 4sin( ) sin( ) sin( )
ya A d y d
y
(6.29)
20 20
1 2 1 1 2 2 1 20 2
10 10
4 42 2 sin(2 ) sin(2 ) cos( ) cos( ) cos( )
y A ya y
y y
(6.30)
Resumiendo, la no linealidad de saturación con zona muerta tiene la siguiente función
descriptiva
2010 1 1 1
10
202 1 1 2
10
10
202 1 20 2
10
; ( ) 0
4; ( ) sin(2 ) cos( )
2 2 4
( ) 2 2 sin(2 ) sin(2 )
;4 4
cos( ) cos( ) cos( )
con
A N A
y A AA y N A
A y
yN A
yA y
yy
A y A
101 2 arcsin ; arcsin
2
y
A A
(6.31)
Los resultados de (6.31) se muestran en la Fig. 6. 7(c) para diversos valores de . La función
descriptiva es real y positiva, de modo que –1/N(A) se ubica sobre el eje real negativo en el
plano de Nyquist. Como la curva N(A) exhibe un máximo, el eje real muestra una doble
parametrización en valores de la amplitud A.
inestable
CL
A
–1/N(A)
A1
A2
Fig. 6.8. Estudio de ciclo límite.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-10
En la Fig. 6. 8 se analizan las condiciones de ciclo límite para un sistema lineal de segundo orden
más integrador
1 2 3
1 2 3
1( ) ; , , reales
1 1F s T T T
T s T s T s
. (6.32)
-
Si el punto de corte de L(j) con el eje real ocurre cuando se cumple Im{L(j)}=0, se deduce
para la frecuencia angular
2 3
1 2 32 3
1 y vale ( )
T TL j
T T TT T
(6.33)
para asegurar la existencia de una oscilación de ciclo límite deberá ser
2 3max 1
max 2 3
1( ) lo que equivale a
T TL j N T
N T T
. (6.34)
Cumpliéndose la condición (6.34), la amplitud de oscilación corresponderá al valor A2 indicado
en la Fig. 6.8, ya que las amplitudes comprendidas entre A1 y A2 pertenecen al dominio de
inestabilidad de F(j).
Para concluir, analicemos algunas no linealidades asociadas a valores particulares de y de y10.
Si = 0 con y10 > 0, la saturación con zona muerta se reduce a una saturación simple, con la
función descriptiva (6.31) se reduce a la (6.24) deducida en la sección anterior.
Si se cumple simultáneamente = 0 e y10 = 0, la saturación con zona muerta se convierte en un
conmutador biestable, cuya función descriptiva obtenida de la (6.31) es
204( )
yN A
A (6.35)
que en la Fig. 6.7 (c) está representada por una hipérbola en línea de trazos.
Para = y10 > 0 la no linealidad corresponde a un triestable, en cuyo caso la (6.31) se reduce a:
2
20 104( ) 1
y yN A
A A
. (6.36)
cuya deducción se ve grandemente simplificada aplicando las consideraciones de la sección
siguiente.
6.2.3. Elementos no lineales con histéresis.
Para comenzar, recordemos que si un elemento no lineal, independiente de la frecuencia, cuya
característica de transferencia posee simetría impar, es sometido a la excitación y1(t) =A sin( t),
la aproximación de primera armónica de la salida está dada en general por

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-11
2 1 1 1 1( ) sin( ) cos( ) sin( )y t a t b t C t . (6.37)
Pasando ahora a notación compleja polar vale
1
1
2 1
j t
j t
y Ae
y C e
(6.38)
cuyo cociente es:
1 1
2 1 1 1 1 1 1
1
cos( ) sin( )j t j
j t
y C e C e C Cj
y Ae A A A
(6.39)
y, como se deduce de (6.37):
1 1 1 1 1 1cos( ) ; sin( )C a C b (6.40)
resulta
2 1 1
1
y a bj
y A A (6.41)
La expresión (6.41) representa la relación entrada-salida del elemento no lineal en régimen
sinusoidal, lo que constituye –por definición– su función descriptiva. Por lo tanto empleando
notación compleja, se puede escribir
1 11 1( ) ( ) ( )
a bN A j R A jI A
A A (6.42)
Pasemos ahora a considerar la característica de transferencia triestable con histéresis de la Fig.
6.9.
a)
b)
y1
y2 y2()
y1()=A sin
Fig. 6.9. Triestable con histéresis.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-12
Si es 1 sin( ) sin para y A t A t resultará la función descriptiva
( ) 0 para N A A a . (6.43)
Si en cambio la amplitud A de la excitación supera el umbral de actuación a, resulta
1 1( ) ( ) ( )N A R A jI A . (6.44)
La parte real R1(A) puede ser calculada teniendo en cuenta la simetría de la onda de salida y2( )
respecto de :
1 2
0
2 2 2( ) sin( ) sin( ) cos cos
bR A y d b d
A A A
; (6.45)
y pueden calcularse a partir de las condiciones
2
2
sin arcsin , siendo cos 1
sin , con lo que cos 1 por ser > .2
a aA a
A A
qaA qa
A
(6.46)
En consecuencia
2 2
1
2( ) 1 1
b a qaR A
A A A
. (6.47)
El cálculo de la parte imaginaria I1(A) puede realizarse aplicando la expresión
1
2( ) cos( )I A b d
A
, (6.48)
sin embargo, nosotros seguiremos otro camino, que nos conducirá a un resultado idéntico, pero
que posibilitará extraer una conclusión general respecto de la incidencia de la histéresis sobre la
función descriptiva de una no linealidad cualquiera.
En general, la componente imaginaria de la función descriptiva tiene por expresión:
2
1 2
0
1( ) ( ) cos( )I A y d
A
(6.49)
siendo a su vez
1 1sin( ); cos( )y A dy A d , (6.50)
es decir que 1cos( ) puede ser reemplazado por / .d dy A Observemos que esta substitución
en la integral (6.49) implica tomar como variable integración ya no a sino a y1, por lo que los

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-13
límites integración habrán de ser cambiados convenientemente. Consideremos para ello, de
acuerdo con la Fig. 6.10, a la característica de transferencia del conmutador triestable,
subdividida en dos funciones unívocas de y1: la función “inferior” Fi que es recorrida para
valores crecientes de y1 (dy1/d >0) y la función “superior” Fs, que corresponde a valores de y1
para los cuales sea dy1/d <0. Con el cambio de variable de integración propuesto se tendrá:
y1() = A sin
y2
y1
y1
Fig. 6.10. Excitación y caminos de integración.
2 0
1 1 1 1 12
0 0
1 12
1 1( ) ( ) cos( )
1( )
A A
S
A A
A
A
i i
s i
I A y d dy dy dyA A
I A dyA
F F F
F F
(6.51)
La integral entre corchetes no es otra cosa que el área de la superficie limitada por el ciclo de
histéresis:
1 histéresis 2 (1 )
A
A
s i dy S ab q
F F . (6.52)
Esta última consideración nos conduce a la importante conclusión de que solamente aquellas
características de transferencia que presenten histéresis, poseerán una función descriptiva con
componente imaginaria no nula.
Para la no linealidad propuesta se tiene entonces:
2 2
2
2 2 (1 )( ) 1 1
b a qa ab qN A j
A A A A
. (6.53)

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-14
Obsérvese que si es q=1, se obtiene la característica de transferencia de un conmutador
triestable ideal (Fig. 6.11(a)), cuya función descriptiva es
24
( ) 1b a
N AA A
(6.54)
con componente imaginaria nula ya que carece de histéresis.
–a y1
y2
a
–b
b
a)
–a y1
y2
a
–b
b
b)
y1
y2
–b
b
c)
Fig. 6.11. Conmutadores.
Si q =
–1, la característica de transferencia corresponde a un conmutador biestable con histéresis
(Fig. 6.11(b)), correspondiéndole la función descriptiva
2
2
4 4( ) 1
b a abN A j
A A A
(6.55)
Finalmente, si es a =
0 se obtiene la característica de un conmutador biestable ideal (Fig.
6.11(c)), para el cual vale
4
( )b
N AA
. (6.56)
6.2.4. Ejemplo de aplicación.
Sea calcular la amplitud y frecuencia de la oscilación de ciclo límite que aparece en el siguiente
sistema de lazo cerrado.
Fig. 6.12. Controlador biestable con planta integrador + constante de tiempo.
Los parámetros del ciclo límite quedan determinados por la intersección del diagrama de Nyquist
de L(j) con la función –1/N(A) de la no linealidad. Partiendo de (6.55)

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-15
2 2
2
4 4 1( ) 1 se obtiene: 1
( ) 4
b a ab A a aN A j j
A A A N A b A A
(6.57)
4
aj
b
Fig. 6.13. Intersección de los lugares geométricos.
El punto P de intersección de los lugares geométricos define un ciclo límite (oscilación
automantenida) estable, cuya amplitud y frecuencia pasamos a calcular
2 2
( )( )
1 1
K K T jL j
j j T T
(6.58)
Igualando las partes imaginarias de (6.57) y (6.58) podemos determinar la frecuencia de
oscilación.
3 2
2 2
4 0
41
K a bKT
b aT
(6.59)
La frecuencia del punto de intersección P está dada por la solución real positiva de (6.59),
mientras que la amplitud AP correspondiente surge de igualar las partes reales de (6.57) y
(6.58):
2 2
2 2 2 2
2 2
2 2
1
41 1
1 4 1
cos( ) 4 y llamando sin( ) ;
sin( ) 1
1es tan y en definitiva
4
P P
P
P
P P
KT A a A a bKT
T b A a A a T
a bKT
A a T
a T aA
bKT
.sin ( )P
(6.60)
A fin de analizar la bondad de la aproximación por función descriptiva resolveremos (6.59) y
(6.60) para el ejemplo numérico:
a = 0.2
b = 5
T = 1 seg
K = 0.2

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-16
resultando P = 1.674 rad/seg; P = 0.5384; AP = 0.39; valores que pasamos a comparar
con los obtenidos mediante la simulación del sistema que se grafican en la Fig. 5.44 .
Fig. 6.14. Simulación de la oscilación de ciclo límite para el sistema de la Fig. 6.12
Se constata que los valores calculados mediante la función descriptiva, difieren en menos del 2%
de los valores medidos en la simulación, lo que ratifica la bondad del método.
Para concluir el ejemplo, resulta conveniente verificar el cumplimiento de las suposiciones
básicas listadas en las páginas 6-4 y 6-5:
Sup. I: se cumple que la característica de transferencia del elemento no lineal posee
simetría impar.
Sup. II: se cumple que la parte lineal del sistema posee respuesta pasa bajos, ya que el
grado del denominador de L(j) es 2 mientras que el grado de su numerador es nulo.
Sup. III: se cumple que la frecuencia de oscilación automantenida se encuentra en las
cercanías o es mayor que la frecuencia de corte de la respuesta en frecuencia del
elemento lineal. Como es fácil de verificar, la frecuencia de corte vale c = 0.1963
rad/seg, siendo P = 1.674 rad/seg >c, lo que nos permite extraer la conclusión de
que la forma de onda a la salida del elemento lineal poseerá un bajo contenido
armónico (hecho reafirmado por el gráfico de la Fig. 6.14).
Sup. IV: se cumple la condición de polos estables, ya que L(s) posee un polo en el
origen y un polo en el semiplano izquierdo.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-17
6.3. Criterios Generalizados de Estabilidad.
En el punto 6.2 hemos introducido las funciones descriptivas como una metodología aproximada
para comprobar la estabilidad del funcionamiento de un sistema realimentado no lineal. La
aplicación del método de la función descriptiva queda supeditada, como vimos, al
cumplimiento de un conjunto de condicionamientos referidos tanto a la parte lineal como a la
parte no lineal. En el presente apartado presentaremos algunos criterios que permiten juzgar de
manera más generalizada la estabilidad de los sistemas dinámicos. Para ello debemos
primeramente introducir alguna nociones elementales que serán de mucha ayuda en nuestros
análisis.
6.3.1. Normas de señales y de sistemas. Teorema de la ganancia pequeña.
Sea una señal u(t) supuesta continua por partes para todo t. Introduciremos diferentes normas
para la señal considerada. En primer lugar recordemos que una norma debe poseer las siguientes
cuatro propiedades
(i) 0
(ii) 0 ( ) 0,
(iii) ,
(iv) (desigualdad del triángulo).
u
u u t t
au a u a
u v u v
Norma–1 La norma–1 de una señal u(t) se define como la integral de su valor absoluto:
1: ( )u u t dt
. (6.61)
Norma–2 La norma–2 de u(t) es:
2
2: ( )u u t dt
. (6.62)
Supongamos por ejemplo que u(t) es la corriente que circula a través de un resistor de 1. La
potencia instantánea es igual a [u(t)]2 y la energía total es igual a la integral de esta última
expresión, es decir 2
2u . Generalizaremos esta interpretación y definiremos la potencia
instantánea de una señal u(t) como [u(t)]2
y su energía se define como el cuadrado de su
norma-2.
Norma– La norma– de una señal es la mínima cota superior de su valor absoluto:
: sup ( )t
u u t . (6.63)
Por ejemplo la norma– de 1 1( )te t es igual a 1. Aquí 1(t) denota la función escalón
unitario3.
3 Por cierto 1 1( ) 1t te t e
¿podemos decir porqué?

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-18
Normas de sistemas: dado un sistema caracterizado por su función de transferencia G(s),
introduciremos dos normas para el mismo
2
2
1norma-2 de ( ) : ( )
2G s G G j d
(6.64)
norma- de ( ) : sup ( )G s G G j
(6.65)
La norma- de G es igual a la distancia medida desde el origen del plano complejo al punto más
alejado del diagrama de Nyquist de G. También aparece como el valor pico en el diagrama de
Bode de magnitudes de G(j), cumpliéndose además que
GH G H . (6.66)
Teorema de la Ganancia Pequeña: El concepto más sencillo sobre estabilidad es la estabilidad
BIBO (o estabilidad de entrada-salida) ya introducido al analizar sistemas de muestreados. Un
sistema posee estabilidad BIBO si a entradas acotadas corresponden salidas también acotadas, es
decir que la ganancia del sistema es siempre finita.
G(s)
H(s)
r + e y
+
Fig. 6.15 Sistema realimentado.
Si consideramos el sistema de la Fig. 6.15, donde G(s) y H(s) pueden ser lineales o no, el error e
es e =
r
+H(s)
y
= r
+ H(s) G(s)
e. La norma del error viene dada por la expresión
1 ( ) ( ) 1 ( ) ( )
r re
G s H s G s H s
(6.67)
para cualquier norma que tomemos. Si ( ) ( ) 1G s H s la ganancia del sistema es finita y por
lo tanto el sistema es BIBO-estable. El enunciado del teorema de la ganancia pequeña es
entonces el siguiente: una condición suficiente para que el sistema considerado posea estabilidad
de entrada-salida o estabilidad BIBO es que
( ) ( ) 1G s H s . (6.68)
En el caso de que todos los componentes del sistema sean lineales, basta con el cumplimiento de
una condición menos restrictiva: ( ) ( ) 1G s H s .

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-19
6.3.2. El criterio de Popov.
Al igual que hiciéramos para introducir la función descriptiva, consideraremos también aquí un
sistema compuesto por una no linealidad principal independiente de la frecuencia y una parte
lineal. Supongamos que la estructura del sistema es la que muestra la Fig. 6.16, siendo f(y) la
característica de transferencia del elemento no lineal4.
G(s)
f(y)
r(t)=0 + e y
–
Fig. 6.16 Sistema con no-linealidad.
Por lo que respecta a la no linealidad, consideraremos que f(y) es una función unívoca y
continua por tramos, perteneciente al sector [K1, K2] es decir que se cumple
1 2 1 2
( )( ) o bien 0
f yK y f y K y K K y
y (6.69)
siendo además f(0)=0, tal como muestra la Fig. 6.17.
Fig. 6.17 Condición del sector para f(y).
G(s)
k
r(t)=0 + e y
–
ky
Fig. 6.18 Sistema asociado de Aizerman.
4 El hecho de considerar la no linealidad en la rama de realimentación no implica ninguna pérdida de generalidad ya
que el diagrama de bloques puede ser reducido a cualquier otra forma que resultare conveniente, por ejemplo a la
forma de la Fig. 6.2.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-20
Ya en 1946 M. A. Aizerman planteó la conjetura de que si el sistema asociado de la Fig. 6.18
resultaba estable tanto para k =
K1 como para k
=
K2, entonces el sistema no lineal de la Fig.
6.16 debería resultar estable para cualquier f(y) perteneciente al sector [K1, K2].
Desgraciadamente5 la conjetura de Aizerman probó ser falsa, como fué demostrado con varios
contraejemplos, pero sirvió como punto de partida para otros investigadores. En particular, el
rumano V. M. Popov formuló en 1961 un criterio en el dominio de la frecuencia que recuerda al
criterio de Nyquist.
Teorema de Popov: Dado el sistema de la Fig. 6.16, el punto y =
0 es globalmente
6 estable si
El sistema lineal es estable,
La función no lineal satisface
( )
0 0f y
K yy
(6.70)
Existe una constante TP que verifica
1
Re (1 ) ( ) 0, 0Pj T G jK
. (6.71)
Gráficamente se puede interpretar el criterio de Popov de la siguiente manera7. Escribamos a
G(j) explicitando su parte real G1() y su parte imaginaria G2():
1 2( ) ( ) ( )G j G jG (6.72)
Teniendo en cuenta (6.72), la condición de Popov (6.71) se rescribe como:
1 2 1 1 2 2
1 2
(1 ) ( ) ( ) ( ) ( ) ( ) ( )
Re (1 ) ( ) ( ) ( )
P P P
P P
j T G jG G j T G T G jG
j T G j G T G
1 2
1( ) ( ) 0PG T G
K . (6.73)
Formamos ahora una función auxiliar denominada GP(j) de acuerdo a la expresión8
1 2( ) ( ) ( )PG j G j G (6.74)
5 Decimos desgraciadamente pues si Aizerman hubiera estado en lo cierto, bastaría con investigar el lugar de Evans
de la ecuación característica 1+kG(s)=0 y determinar si no aparecen raíces en el semiplano derecho para la
condición k[K1, K2], para juzgar la estabilidad del sistema no lineal. 6 La estabilidad global significa que, en condiciones de excitación nula r(t)=0, si una perturbación arranca al sistema
de su punto de reposo, el mismo retornará finalmente a la condición y=0. 7 La demostración formal del criterio de Popov requiere el empleo de análisis funcional y excede los alcances de
estas notas. 8 Naturalmente los subíndices “P” se refieren a Popov... ¿a quién más?

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-21
Si ponemos
( )PG j x jy , (6.75)
la condición (6.73) se transforma en
1
0Px T yK
(6.76)
lo que significa que, para que el sistema sea estable, la gráfica de GP(j) (es decir la curva de
Popov) debe encontrarse a la derecha de la línea definida por:
1
Px T yK
. (6.77)
GP
G(j)
recta
tangente
1 K
jIm
Re
Fig. 6.19 Interpretación geométrica del criterio de Popov.
La recta (6.77) está girada respecto del eje imaginario el ángulo = –arctan(TP) y pasa por el
punto –1/K+j0. El valor de TP debe entonces ser elegido de manera tal, que K tome el valor
máximo posible: ello significa la máxima apertura del sector [0,K] para la no linealidad f(y).
Como resulta obvio de la Fig. 5.49, el máximo valor de K se logra cuando la recta (6.77) es
tangente a la curva de Popov GP(j).
Algunos ejemplos terminarán de aclarar el panorama.
6.3.2.1. Aplicación a una planta lineal de segundo orden.
Si en la Fig. 6.16 la parte lineal G(s) es de la forma
2
0
2 2
0 0
( )2
G ss s
, (6.78)
nos planteamos la inquietud de conocer cuál es la máxima apertura del sector que garantiza un
funcionamiento estable para cualquier no linealidad f(y) contenida en el mismo.
Sustituyendo s=j en (6.78) obtenemos la curva de respuesta en frecuencia G(j), en base a la
cual calculamos la curva de Popov GP(j) correspondiente.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-22
2
0
2 2
0 0
( )2
G jj
(6.79)
2 2 2
0 0 0
1 2 22 2 2 2 2
0 0
2 2 2 30 0 0
1 22 22 2 2 2 2 2 2 2 2 2
0 0 0 0
1 2
2( ) ( ) ( )
4
2( ) ; ( )
4 4
( ) ( ) ( )P
jG j G jG
G G
G j G j G
2 2 2 3 2
0 0 0
22 2 2 2 2
0 0
2( )
4P
jG j
(6.80)
De (6.80) se deduce que cuando tiende a infinito, GP(j) tiende al origen, con un ángulo igual
a arctan(20). En consecuencia GP se encuentra en su totalidad a la derecha de la tangente al
origen cuya pendiente es 20. Por lo tanto si elegimos una recta de Popov con pendiente 20,
el punto –1/K puede ubicarse en cualquier lugar perteneciente al intervalo (–,0) del eje
real. Ello significa que el sistema realimentado no lineal será absolutamente estable para
cualquier característica de transferencia f(y) contenida en el primero y tercer cuadrantes.
jIm
Re
Fig. 6.20 Criterio de Popov para un sistema de segundo orden con 0=1.
6.3.2.2. Aplicación a una planta lineal de tercer orden.
Sea ahora la parte lineal del sistema de la forma
1( )
1 2 1G s
Ts Ts Ts
(6.81)
a la que corresponde la respuesta en frecuencia (normalizada):

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-23
1( ) ,
1 2 1G j T
j j j
(6.82)
2
2 2 2 2
3 1 21 1 2( )
1 1 4 1 1 4
jj jG j j
cuya función de Popov es
2
2 2
3 (1 2 )( ) Re ( ) Im ( )
(1 )(1 4 )P
jG j G j j G j
. (6.83)
La curva de Popov arranca desde el punto –3–j para =0 terminando en el origen para
con dirección paralela al eje imaginario y se encuentra representada en la Fig. 5.51. Dada la
convexidad de la curva de Popov, resulta gráficamente evidente que la recta de Popov habrá de
ser tangente a GP(j) en el punto donde ésta cruza el eje real negativo. Para dicho punto la
fracción –1/K adquiere el valor más cercano posible al origen, con lo que K alcanza su máximo
y define el mayor sector [0,K] para el que puede asegurarse la estabilidad del sistema
realimentado.
De (6.83) se determina que GP(j) cruza el eje real para la frecuencia normalizada 1/ 2
para la cual vale
1 2 1
1.532
PG j KK
(6.84)
en definitiva, el sistema resulta estable para funciones f(y) contenidas en el sector [0, 1.5].
TP
G(j)
GP(j)
Fig. 6.21 Criterio de Popov aplicado al sistema de tercer orden de la Ec. (6.81).

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-24
Si bien observando la Fig. 5.51 se deduce inmediatamente que la constante TP que define la
pendiente de la recta de Popov es no nula, su valor puede ser calculado analíticamente de manera
bastante sencilla. 1/ TP es la pendiente de la tangente a la curva de Popov GP(j) para el valor
de considerado, es decir:
0.707 0.707
Im Im1 1
Re Re 3
P P
P P P
d G d G d
T d G d G d
. (6.85)
6.3.3. Criterio del Círculo (Tsypkin).
En 1963 Ya. Z. Tsypkin presentó una extensión del criterio de Popov, para no linealidades f(y)
confinadas en un sector limitado [K1, K2] tal como se muestra en la Fig. 6.17, valiendo la
condición (6.69) que repetimos a continuación
1 2
( )(0) 0; , 0
f yf K K y
y .
Considerando K como la media entre las pendientes K1 y K2 podemos escribir:
1 2
2
K KK
(6.86)
y además se tiene que:
1 2( )K K y f y Ky K K y . (6.87)
Llamando ( ) ( )f y f y Ky nos queda:
1 2 1 21 2
1 2 2 1
( )2 2
( )2 2
K K K KK y f y K y
K K K Ky f y y
(6.88)
es decir:
2 1 2 1( ) ( ); y llamando se tiene
2 2r r
f y K K K K f yK K
y y
. (6.89)

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-25
Fig. 6.22 Descomposición de la función f(y).
Tal como se observa en la Fig. 6.22, la no linealidad puede considerarse descompuesta en una
parte lineal K y en otra no lineal ( )f y centrada sobre el eje y. En estas condiciones, el sistema
de la Fig. 6.16 resulta equivalente al de la Fig. 6.23 valiendo
( ) ( )e r f y r Ky f y (6.90)
En la Fig. 6.23(b) se tiene para el sistema lineal simplificado
1
GG
KG
; (6.91)
aplicando ahora el teorema de la ganancia pequeña (ver 6.3.1), la condición suficiente para que
el sistema sea estable en el sentido BIBO es que
( ) ( ) 1G s f y ; (6.92)

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-26
G(s)
f(y)
r(t)=0 + e y
–
Fig. 6.23 Sistema modificado y simplificado con realimentación no lineal.
por lo tanto, pasando a expresiones en frecuencia
1
( ) 1, es decir ( )
r rK G j KG j
(6.93)
y sustituyendo G por su valor se tiene
1
( )
rK KG j
(6.94)
De acuerdo a (6.94) se deduce que la curva de 1/G(j) no debe cortar el círculo de radio Kr
centrado en –K, tal como se observa en la Fig. 6.24
Fig. 6.24 Condición de estabilidad para 1/G(j).

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-27
Teniendo en cuenta ahora las definiciones de K y Kr pueden formularse las condiciones de
estabilidad para G(j), que se grafican en la Fig. 6.25.
1
1
2
2
1 1 ;
1 1 .
r
r
r
r
K K KK K K
K K KK K K
(6.95)
Fig. 6.25 Criterio del círculo para G(j).
En definitiva, dada una no linealidad f(y) contenida en un sector [K1, K2] y siendo G(s) una
función de transferencia sin polos en el semiplano derecho, puede asegurarse la estabilidad del
sistema realimentado si la curva de Nyquist G(j) no corta ni rodea al círculo que intersecta al
eje real en –1/K1 y –1/K2.
Nótese que el criterio del círculo involucra directamente a G(j), mientras que el criterio de
Popov requiere el trazado de la curva modificada GP(j).
A modo de ejemplo, apliquemos el criterio del círculo al sistema lineal con retardo
0.5( )
1 2
sG ss s s
e
(6.96)
cuyo diagrama de Nyquist se muestra en la Fig. 6.26.
Constatamos que el diagrama de G(j) se encuentra siempre a la derecha de la recta que pasa por
–0.625 (asíntota vertical). Dicha recta puede considerarse como un círculo de radio infinito que
corta al eje real en –1/K1 = – y en –1/K2 = –0.625 resultando K1 = 0 y K2 = 1.6 los límites
del sector de estabilidad. Esto garantiza que si la no linealidad es una zona muerta o una
saturación, cuya pendiente en la parte lineal no supere 1.6 entonces el sistema será estable.

SISTEMAS DE CONTROL APLICADO - Capítulo 6 - pág. 6-28
Fig. 6.26 Curva de G(j) y algunos círculos que satisfacen el criterio de Tsypkin.
Resulta evidente que el sistema realimentado será estable para cualquier otro círculo de radio
finito ubicado a la izquierda de la asíntota que corta al eje real en –0.625, tal como el que se ha
trazado en la figura precedente (la distorsión del círculo se debe a la desigualdad de las escalas
horizontal y vertical de la figura).