Analisis de Inestabilidad en Sistemas Eléctricos

of 245
Transcript of Analisis de Inestabilidad en Sistemas Eléctricos
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
1/245
INSTITUTO TECNOLÓGICO de moreliaDEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
PROGRAMA DE GRADUADOS E INVESTIGACIÓN EN INGENIERÍA ELÉCTRICA
Análisis de Inestabilidades en Sistemas
Eléctricos de Potencia por Medio de la Teoría
de Bifurcación
T E S I S
que para obtener el grado de
Maestro en Ciencias en Ingeniería Eléctrica
Presenta
Raúl García Kasusky
Morelia, Mich., Octubre 2002
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
2/245
Dedicatoria
Dedico esta tesis:
A mis Padres, porque siempre me han brindado su apoyo y comprensión incondicionalmente
A mi hermana por su cariño y comprensión
A Dios por todo lo que me ha dado y me ha permitido hacer.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
3/245
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
4/245
i
RESUMEN
En esta tesis se estudia las inestabilidades no lineales, incluyendo colapso de voltaje, que
ocurren en los sistemas de potencia debido a cambios cuasiestáticos en sus parámetros. El
análisis está basado en la dinámica no lineal y teoría de bifurcaciones. La presencia de
bifurcaciones estáticas y dinámicas está determinada por el análisis de estabilidad de los
puntos de equilibrio de los sistemas de potencia. También se muestra la relación entre las
bifurcaciones Hopf y la dinámica del colapso de voltaje. Además, se muestra que la aplicación
tanto de controles de excitación del generador como de compensadores estáticos de VAR
(CEV) amortiguan oscilaciones sostenidas de voltaje para cierto nivel de demanda de potencia
reactiva así como incrementan el punto máximo de cargabilidad del sistema.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
5/245
ii
ABSTRACT
Non-linear instabilities, including voltage collapse, occurring in a power system due to quasi-
static changes in its parameters are studied in this thesis. The analysis is based on the
nonlinear dynamical theory of bifurcations. The presence of static and dynamic bifurcations is
determined by the stability analysis of the power system equilibrium points. It is shown the
relation between Hopf bifurcations and the dynamics of voltage collapse. In addition, it is
shown the application of both generator’s excitation control and Static VAR Compensator
(SVC) to damp out sustained voltage oscillations for a given level of reactive power demand
as well as increasing the maximum point of system’s loadability.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
6/245
iii
Índice de contenido
Pagina
Abstract…………………………………………………………………………………………i
Resumen………………………………………………………………………………………..ii Índice de contenido…………………………………………………………………………...iii
Glosario de términos…………………………………………………………………………vii
Índice de figuras……………………………………………………………………………. xiii
Índice de tablas………………………………………………………………………………..i x
Objetivo………………………………………………………………………………………. xx
Justificación………………………………………………………………………………….. xx
Capítulo 1 ...................................................................................................................................1
Introducción...............................................................................................................................1
1.1 Introducción.........................................................................................................1
1.2 Inestabilidades en sistemas eléctricos de potencia ..............................................3
1.2.1 Inestabilidad angular ..........................................................................................4
1.2.2 Inestabilidad de voltaje .......................................................................................5
1.3 Herramientas para el análisis de inestabilidades de voltaje.................................6
1.3.1 Aproximación estática .........................................................................................7
1.3.1.1 Sensibilidad V-Q .............................................................................................71.3.1.2 Descomposición del valor singular .................................................................7
1.3.1.3 Análisis modal .................................................................................................8
1.3.1.4 Método de continuación de flujos de potencia ..............................................10
1.3.2 Aproximación de dinámica de pequeñas señales ..............................................10
1.3.3 Aproximación de dinámica de gran señal .........................................................11
1.4 Planteamiento del problema ..............................................................................11
1.5 Contenido de la tesis..........................................................................................12
Capítulo 2 .................................................................................................................................14
Modelado de sistemas eléctricos de potencia para análisis dinámico de gran señal .........14
2.1 Introducción.......................................................................................................14
2.2 Modelado de Componentes ...............................................................................15
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
7/245
iv
2.2.1 Generador síncrono...........................................................................................15
2.2.1.1 Ejes de referencia...........................................................................................17
2.2.1.2 Ecuación de oscilación ..................................................................................19
2.2.2 Sistemas de excitación .......................................................................................25
2.2.3 Red de transmisión ............................................................................................28
2.2.4 Cargas ...............................................................................................................29
2.2.5 Compensador estático de VAR (CEV) ...............................................................32
2.3 Modelado de un sistema multimáquina.............................................................37
2.3.1 Ecuaciones Diferencial-Algebraicas (EDA) .....................................................38
2.3.2 Puntos de equilibrio y su estabilidad ................................................................43
2.3.3 Relación entre estabilidad de puntos de equilibrio y bifurcaciones .................45
2.4 Modelado equivalente de un sistema multimáquina .........................................462.4.1 Teorema de Schur ..............................................................................................46
2.4.2 Modelo equivalente de un sistema por ecuaciones algebraicas........................48
2.4.3 Modelo equivalente de un sistema por ecuaciones diferenciales......................48
Capítulo 3 .................................................................................................................................50
Conceptos de la teoría de bifurcación....................................................................................50
3.1 Introducción.......................................................................................................50
3.2 Definición de un sistema dinámico ...................................................................50
3.3 Puntos de equilibrio y su estabilidad .................................................................53
3.4 Ciclos límite y su estabilidad.............................................................................59
3.5 Planos de fase y flujo.........................................................................................61
3.6 Estabilidad estructural .......................................................................................63
3.7 Bifurcación ........................................................................................................64
3.8 Bifurcaciones Locales........................................................................................65
3.8.1 Bifurcación Saddle-Node (SNB) ........................................................................66
3.8.2 Bifurcación Transcrítica (TCB) ........................................................................68
3.8.3 Bifurcación Pitchfork (PFB) .............................................................................69
3.8.4 Bifurcación Hopf (HB) ......................................................................................72
3.9 Bifurcaciones Globales......................................................................................76
3.9.1 Bifurcación de Doblez de Ciclos (CFB) ............................................................76
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
8/245
v
3.9.2 Bifurcación de Periodo Infinito (IPB) ...............................................................77
3.9.3 Bifurcación Homoclínica (HCB) o (BSKY) .......................................................78
3.9.4 Bifurcación de Toroide (TRB) ...........................................................................79
3.9.5 Bifurcación de Doble Periodo (PDB) y Caos ...................................................80
Capítulo 4 .................................................................................................................................89
Simulación de modelos dinámicos..........................................................................................89
4.1 Introducción.......................................................................................................89
4.2 Metodología de simulación ...............................................................................89
4.3 Software para simulación de sistemas dinámicos .............................................90
4.4 Simulación de modelos......................................................................................91
4.4.1 Modelo 1: Sistema eléctrico de potencia con carga dinámica tipo II (1) .........91
4.4.2 Modelo 2: Máquina bus - infinito con excitación fija .....................................1104.4.3 Modelo 3: Máquina bus - infinito con sistema de excitación automático.......113
4.4.4 Modelo 4: Máquina bus – infinito con sistema de excitación automático y alto
coeficiente de amortiguamiento en el generador ............................................120
4.4.5 Modelo 5: Sistema de dos máquinas y línea de transmisión larga .................128
4.4.6 Modelo 6: Sistema de dos máquinas-bus infinito............................................133
4.4.7 Modelo 7: Sistema de dos generadores y carga tipo exponencial ..................144
4.4.8 Modelo 8: Sistema Carga-Generador con sistema de control de voltaje .......150
4.4.9 Modelo 9: Sistema eléctrico de potencia con carga dinámica tipo II (2) .......153
4.4.10 Modelo 10: Control de las bifurcaciones variando la potencia mecánica y el
coeficiente de amortiguamiento.......................................................................160
4.4.11 Modelo 11: Sistema compensado con un dispositivo estático de VAR............164
4.4.12 Modelo 12: Sistema de potencia utilizando generador con sistemas de
excitación lento y rápido .................................................................................166
4.4.12.1 Generador con sistema de excitación lento .............................................167
4.4.12.2 Generador con sistema de excitación rápido ...........................................170
4.4.13 Modelo 13: Sistema de potencia de 4 nodos compensado con un CEV más
complejo ..........................................................................................................174
Capítulo 5 ...............................................................................................................................182
Conclusiones, aportaciones y trabajos futuros ...................................................................182
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
9/245
vi
5.1 Conclusiones....................................................................................................182
5.2 Aportaciones....................................................................................................184
5.3 Trabajos futuros...............................................................................................184
Referencias…………………………………………………………………………………..186
Apéndices
Apéndice A…………………………………………………………………………...190
Apéndice B…………………………………………………………………………...197
Apéndice C…………………………………………………………………………...207
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
10/245
vii
Glosario de términos
ER P Potencia activa transmitida desde el nodo de envío al nodo de recepción.
E E Voltaje del nodo de envío.
R E Voltaje del nodo de recepción.
ER Reactancia conectada entre los nodos de envío y recepción.
ERδ Diferencia angular entre los nodos de envío y recepción.
P Potencia activa.
Q Potencia reactiva.
θ Ángulo del voltaje en nodos de carga.
V Magnitud del voltaje nodal.
J Matriz Jacobiana o Jacobiano.
U ,W Matrices ortogonales del Jacobiano.
iµ , iω Columnas de U y W respectivamente.
∑ Matriz diagonal del Jacobiano.
iσ Elementos de la matriz diagonal del Jacobiano (valores singulares).
R J Jacobiano reducido.
R , L Matrices eigenvector derecha e izquierda del Jacobiano reducido.
Λ Matriz diagonal de eigenvalores del Jacobiano reducido.
i R , i L i-ésimos eigenvectores derecho e izquierdo del Jacobiano reducido.
iλ Eigenvalor del i-ésimo voltaje modal.
( , , ) L x u N Matriz del sistema linealizada.
( , , ) H x u N Matriz de entradas linealizada.
Variables de estado dinámicas.
u Señal de entrada al sistema.
N Red de transmisión.
y Variables instantáneas o algebraicas del sistema.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
11/245
viii
λ Parámetros del sistema que se pueden variar cuasiestáticamente.
XPPAUT Software de simulación de sistemas dinámicos (X-Windows Phase Plane Plus
Auto).
EDA Sistema de ecuaciones diferencial-algebraico.
mT Par mecánico.
Rmω Velocidad angular del rotor.
eT Par eléctrico.
fmm Fuerza magnetomotriz.
0mω , 0ω Velocidad síncrona (mecánica y eléctrica).
, ,a b c Devanados estáticos representando las fases del estator.
, , A B C Ejes de referencia estacionarios en el estator.
,d q Devanados giratorios representando los ejes directo y de cuadratura en el rotor.
mθ Ángulo mecánico del rotor medido con respecto al eje de referencia
estacionario A del estator.
0θ Valor inicial de mθ .
mα Ángulo del eje de referencia Bus con respecto al eje A.
0α Valor inicial de mα .
mδ Desplazamiento angular del rotor con respecto al eje de referencia Bus
J Momento de inercia de la masa del rotor en Kg-m2
aT Par de aceleración.
d T Par de amortiguamiento.
m P Potencia mecánica de entrada.
ge P Potencia eléctrica de salida.
d P Potencia de amortiguamiento.
a P Potencia de aceleración.
Rm J ω Momento angular del rotor en J-s.
Momento de inercia.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
12/245
ix
H Constante de inercia del rotor en seg.
k W Energía cinética almacenada en el generador a velocidad síncrona en MJ/seg.
(3 ) BS φ Capacidad nominal del generador síncrono.
t Tiempo en segundos.ω Es la velocidad relativa de la velocidad angular del rotor con respecto a la
velocidad síncrona.
m D Par de fricción.
a D Par asíncrono.
D Coeficiente de amortiguamiento en seg/rad.
L P Potencia real de carga en el nodo de generación.
δ Ángulo del voltaje en terminales de generador.
ijG Conductancia de la línea de transmisión.
ij B Susceptancia de la línea de transmisión.
0d T Constante de tiempo transitoria del generador en el eje directo.
E ′ Voltaje interno de cuadratura del generador.
d Reactancia de eje directo.
d
′ Reactancia transitoria de eje directo.
Reactancia de la línea de transmisión.
fd E Voltaje de campo del generador.
t V Voltaje de terminales del generador.
E S Función de saturación del excitador.
, , A E F K K K Ganancias del sistema del sistema de excitación IEEE tipo-1.
, , A E F T T T Constantes de tiempo del sistema de excitación IEEE tipo-1.
ref V Voltaje de referencia.
3V Voltaje de retroalimentación estabilizador.
RV Voltaje del regulador.
0 fd E Punto de operación inicial de fd E .
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
13/245
x
, fdmin fdmax E E Límites mínimo y máximo en el voltaje de campo del sistema de excitación.
fdr E Voltaje de campo del generador controlado por el excitador rápido.
fdrlim E Constante para el modelado de los límites del voltaje de campo del excitador.
ijY Magnitud de la admitancia de la línea de transmisión.
1 6,...,a a Constantes del modelo polinomial para la potencia real y reactiva.
0 0, P Q Potencias real y reactiva nominales.
0V Voltaje nominal.
0 , f f Frecuencia nominal y frecuencia del voltaje de bus.
f a Parámetro de sensibilidad de la frecuencia.
ZIP Modelo de carga que combina los modelos de impedancia, corriente y potenciaconstantes
( )t z Vector de variables de estado del bus de carga.
d L Demanda nominal en MVA en el bus de carga.
pf Factor de potencia.
, , , D a b k Coeficientes del modelo de carga dinámica tipo I.
0 , pw P K Coeficientes del modelo de carga dinámica tipo II.
0, , pv K T Q Coeficientes del modelo de carga dinámica tipo II.
2, ,qw qv qv K K K Coeficientes del modelo de carga dinámica tipo II.
1 1, P Q Potencias constantes real y reactiva del modelo de carga dinámica tipo II.
( )CEV SVC Compensador estático de VAR (Static VAR’s Compensator).
,SVC SVC K T Ganancia y constante de tiempo del CEV.
B Susceptancia del compensador no limitada.
SVC B Susceptancia limitada de salida del compensador.
lim B Constante para modelar la capacidad del compensador.
,min max B B Límites mínimo y máximo para modelar la capacidad del compensador.
K Pendiente característica del CEV.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
14/245
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
15/245
xii
T Periodo en segundos.
(SNB) Bifurcación Punto de Silla (Saddle-Node Bifurcation).
(TCB) Bifurcación Transcrítica (Transcritical Bifurcation).
(SPFB) Bifurcación de Horquilla Supercrítica (Supercritical Pitchfork Bifurcation).
(UPFB) Bifurcación de Horquilla Subcrítica (Unstable Pitchfork Bifurcation).
(SHB) Bifurcación Hopo Supercrítica (Supercritical Hopf Bifurcation).
(UHB) Bifurcación Hopo Subcrítica (Unstable Hopf Bifurcation).
(CFB) Bifurcación de Doblez de Ciclos (Cyclic Fold Bifurcation).
(IPB) Bifurcación de Periodo Infinito (Infinite Period Bifurcation).
(HCB) Bifurcación Homoclínica (Homoclinic Bifurcation).
(BSKY) Bifurcación Cielo Azul (Blue Sky Bifurcation = HCB).
(TRB) Bifurcación de Toroide (Torus Bifurcation).(PDB) Bifurcación de Doble Periodo (Period Doubling Bifurcation).
µ Exponente de Lyapunov.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
16/245
xiii
Índice de figuras
Figura 1.1 Curva Potencia-Ángulo en un generador síncrono. ...................................................4
Figura 2.1 Pares mecánicos y eléctricos en una unidad generadora..........................................16Figura 2.2 Diagrama esquemático de los devanados de un generador......................................17
Figura 2.3 Ángulos y referencias para la máquina síncrona......................................................17
Figura 2.4 Generador conectado a un nodo que no es referencia..............................................25
Figura 2.5 Diagrama de bloques del excitador lento (IEEE tipo-1)..........................................26
Figura 2.6 Diagrama de bloques del excitador rápido limitado. ...............................................27
Figura 2.7 Modelado del voltaje del devanado de campo con 5pu fdrlim E = . ...........................27
Figura 2.8 Diagrama de bloques del CEV.................................................................................33
Figura 2.9 Modelado de los límites del la susceptancia B . ...................................................... 33
Figura 2.10 Diagrama simplificado del CEV............................................................................34
Figura 2.11 Característica de control del CEV..........................................................................35
Figura 2.12 Diagrama de bloques del CEV...............................................................................36
Figura 2.13 Sistema multimáquina............................................................................................37
Figura 3.1 Órbita y trayectoria de un sistema dinámico............................................................53
Figura 3.2 Definición de estabilidad. ........................................................................................55
Figura 3.3 Región de atracción..................................................................................................55
Figura 3.4 Ciclo límite estable...................................................................................................60
Figura 3.5 Ciclo límite inestable. .............................................................................................. 61
Figura 3.6 Plano de fase. ........................................................................................................... 62
Figura 3.7 Plano de fase con dirección de flujo y nullclines.....................................................63
Figura 3.8 Destrucción de los puntos de equilibrio...................................................................66
Figura 3.9 Diagrama de una bifurcación Saddle-Node. ............................................................67
Figura 3.10 Intercambio de tipo de estabilidad entre los puntos de equilibrio.........................68Figura 3.11 Diagrama de una bifurcación Transcrítica.............................................................69
Figura 3.12 Creación de dos puntos fijos estables a partir de otro estable................................70
Figura 3.13 Diagrama de una bifurcación Pitchfork supercrítica..............................................70
Figura 3.14 Diagrama de una bifurcación Pitchfork subcrítica.................................................71
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
17/245
xiv
Figura 3.15 Planos de fase de la bifurcación supercrítica. ........................................................73
Figura 3.16 Diagrama de una bifurcación supercrítica..............................................................74
Figura 3.17 Planos de fase de la bifurcación subcrítica. ...........................................................74
Figura 3.18 Diagrama de una bifurcación subcrítica.................................................................75
Figura 3.19 Movimiento de los eigenvalores complejos conjugados........................................75
Figura 3.20 Planos de fase de la bifurcación de Doblez de Ciclos............................................76
Figura 3.21 Diagrama de una bifurcación de doblez.................................................................77
Figura 3.22 Planos de fase de una bifurcación de periodo infinito. ..........................................78
Figura 3.23 Planos de fase de una bifurcación Homoclínica. ................................................... 78
Figura 3.24 Diagrama de una bifurcación Homoclínica............................................................79
Figura 3.25 Bifurcación de Toroide. .........................................................................................80
Figura 3.26 Bifurcación de Doble Periodo del sistema de Rössler. ..........................................81Figura 3.27 Atractor extraño del sistema de Lorenz. ................................................................82
Figura 3.28 Dependencia sobre las condiciones iniciales en estados caóticos..........................83
Figura 3.29 ( )t δ Crece exponencialmente rápido al transcurrir el tiempo...............................84
Figura 3.30 Mapa de Poincaré...................................................................................................85
Figura 3.31 Comportamiento del exponente de Lyapunov al variar un parámetro...................86
Figura 3.32 Puntos periódicos de periodo 1, 2,4,6 en el mapa de Poincaré. ............................86
Figura 3.33 Diagrama de bifurcación de las ecuaciones de Lorenz. .........................................87Figura 3.34 Caos transitorio observado en 13.92 24.06λ < < ..................................................88
Figura 4.1 Sistema eléctrico de potencia con carga dinámica...................................................91
Figura 4.2 Diagrama de bifurcación mostrando las regiones estables e inestables...................94
Figura 4.3 Comportamiento de las variables del sistema en 1 10Q = pu. ..................................95
Figura 4.4 Diagrama de bifurcación del sistema de potencia....................................................95
Figura 4.5 Soluciones periódicas inestables surgiendo de la bifurcación Hopf subcrítica........96
Figura 4.6 Ciclo límite creado en la bifurcación Hopf subcrítica. ............................................97
Figura 4.7 Oscilaciones de voltaje en 1 11Q = pu. .....................................................................97
Figura 4.8 Colapso de voltaje en 1 11.19Q = pu........................................................................98
Figura 4.9 Variables del sistema en 1 10Q = pu. ........................................................................98
Figura 4.10 Oscilaciones del sistema en 1 11.84Q = pu. ............................................................99
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
18/245
xv
Figura 4.11 Voltaje del sistema en una bifurcación de doblez................................................100
Figura 4.12 Ciclos límite en 1 10.872, 10.876, 10.885 10.886Q y= pu. ..................................101
Figura 4.13 Voltaje en el nodo de carga al sufrir bifurcaciones de doble periodo en cascada.
.........................................................................................................................................102
Figura 4.14 Atractor extraño generado en 1 10.886Q = pu. .....................................................102
Figura 4.15 Variables del sistema durante el colapso en 1 10.887Q = pu. ...............................103
Figura 4.16 Oscilación estable en 1 11.39Q = pu.....................................................................103
Figura 4.17 Soluciones periódicas estables surgiendo de la bifurcación Hopf supercrítica....104
Figura 4.18 Órbitas de oscilación en 1 11.387957, 11.387, 11.386 11.379Q y= pu. ..............105
Figura 4.19 Voltaje en la carga al sufrir bifurcaciones de doble periodo en cascada. ............105
Figura 4.20 Atractor extraño generado en 1 11.377Q = pu. .....................................................106Figura 4.21 Atractores extraños en diferentes puntos de operación del sistema.....................106
Figura 4.22 Variables del sistema durante el colapso en 1 11.3759Q = pu. .............................107
Figura 4.23 Voltaje en el nodo de carga después de la bifurcación SHB................................108
Figura 4.24 Colapso del sistema en la bifurcación Saddle-Node............................................108
Figura 4.25 Movimiento de los eigenvalores complejos conjugados para cada bifurcación,
respectivamente. ..............................................................................................................109
Figura 4.26 Sistema máquina – bus infinito............................................................................110Figura 4.27 Diagrama de bifurcación sin control automático de voltaje.................................111
Figura 4.28 El sistema es estable en 0.868t P = pu..................................................................112
Figura 4.29 Pérdida de sincronismo del sistema en la bifurcación Saddle-Node en 1.4t P = pu.
.........................................................................................................................................112
Figura 4.30 Diagrama de bifurcación utilizando un control de excitación automática...........114
Figura 4.31 Creación de ciclos límite y bifurcaciones de doble periodo al variar t P . ............115
Figura 4.32 Variables de estado y plano de fase en 1.2715t P = pu.........................................116
Figura 4.33 Variables de estado y plano de fase en 1.3737t P = pu.........................................117
Figura 4.34 Comportamiento caótico del ángulo de carga en 1.474t P = pu. ..........................117
Figura 4.35 Atractor extraño presentado por el sistema en 1.474 . .t P p u= .............................118
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
19/245
xvi
Figura 4.36 Pérdida de sincronismo por medio de una Crisis en 1.4917t P = pu. ...................119
Figura 4.37 Movimiento de los eigenvalores complejos conjugados......................................119
Figura 4.38 Diagrama de bifurcación del sistema con 148.812 D = pu. .................................121
Figura 4.39 Diagrama de bifurcación mostrando las soluciones periódicas. ..........................122
Figura 4.40 Bifurcación de Toroide (TRB) cerca de la bifurcación (SNHB).........................123
Figura 4.41 Oscilaciones estables del sistema en 2.0512t P = pu............................................124
Figura 4.42 Oscilaciones de doble periodo en 1.9716t P = pu.................................................125
Figura 4.43 Caos y pérdida de sincronismo en 1.97t P = pu y 1.9695t P = pu......................... 125
Figura 4.44 Oscilaciones de doble frecuencia en 2.06t P = pu................................................126
Figura 4.45 Toroide descrito por las variables del sistema en 2.06t P = pu. ...........................126
Figura 4.46 El sistema se estabiliza en 2.0618504t P = pu......................................................127
Figura 4.47 El sistema pierde el sincronismo en 2.0618506t P = pu.......................................127
Figura 4.48 Sistema de dos máquinas y línea de transmisión larga. ....................................... 128
Figura 4.49 Diagrama de bifurcación del sistema. ..................................................................129
Figura 4.50 Variables de estado y plano de fase para 1 L = pu. ..............................................130
Figura 4.51 Variables de estado y plano de fase para 2.88 L = pu..........................................131
Figura 4.52 Variables de estado y plano de fase para 2.8919 L = pu......................................131
Figura 4.53 Variables de estado y plano de fase para 2.893 L = pu........................................132
Figura 4.54 Pérdida de sincronismo del sistema en 2.893 L = pu...........................................133
Figura 4.55 Movimiento de los eigenvalores complejos conjugados......................................133
Figura 4.56 Sistema de dos máquinas-bus infinito..................................................................134
Figura 4.57 Diagrama de bifurcación del sistema de dos máquinas bus-infinito....................135
Figura 4.58 Diagrama de bifurcación del sistema de dos máquinas-bus infinito....................136
Figura 4.59 Acercamiento del diagrama de bifurcación en la región inestable. .....................136
Figura 4.60 Variables de estado y plano de fase para 1 2.26 P = pu. ........................................137
Figura 4.61 Variables de estado y plano de fase para 1 2.398 P = pu. ......................................138
Figura 4.62 Condiciones iniciales que tienden hacia el ciclo límite en 1 2.434 P = pu. ...........138
Figura 4.63 El sistema se estabiliza en 1 2.437 P = pu..............................................................139
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
20/245
xvii
Figura 4.64 Bifurcación de doble periodo en 1 2.37524 P = pu................................................139
Figura 4.65 Planos de fase en 1 1 12.37524, 2.3751, 2.37088, P P P = = = 1 2.3707 P = pu. .......140
Figura 4.66 Atractor extraño en 1 2.37 P = pu. .........................................................................140
Figura 4.67 Aceleración y frenado de los generadores 1 y 2, respectivamente. .....................141Figura 4.68 Ciclo límite y punto fijo estables en 1 2.388 P = pu. .............................................142
Figura 4.69 Pérdida de sincronismo en 1 2.468 P = pu. ............................................................142
Figura 4.70 Movimiento de los eigenvalores complejos conjugados......................................143
Figura 4.71 Sistema de dos generadores con carga exponencial.............................................144
Figura 4.72 Puntos de equilibrio estables e inestables del sistema. ........................................146
Figura 4.73 Diagramas de bifurcación de los ángulos en los nodos de generación. ...............147
Figura 4.74 Soluciones periódicas estables e inestables..........................................................147Figura 4.75 Dinámica del sistema en los puntos de operación: 0 0.45 P = pu, 0 0.7 P = pu,
0 0.9 P = pu, 0 1.92 P = pu, 0 2.03 P = pu, 0 2.04 P = pu.......................................................148
Figura 4.76 Movimiento de los eigenvalores complejos conjugados......................................149
Figura 4.77 Sistema Carga-Generador con sistema de excitación ..........................................150
Figura 4.78 Diagrama de bifurcación del sistema. ..................................................................151
Figura 4.79 Colapso del voltaje en 0.4435Q = pu. .................................................................152
Figura 4.80 Movimiento de los eigenvalores complejos conjugados......................................152Figura 4.81 Diagrama de bifurcación del sistema. ..................................................................154
Figura 4.82 Soluciones periódicas debidas a la bifurcación Hopf supercrítica.......................155
Figura 4.83 Variables de estado y plano de fase en 1 2.977Q = pu..........................................156
Figura 4.84 Oscilaciones en 1 29889, 2.9894, 2.98956, 2.98958Q = pu.................................157
Figura 4.85 Voltaje en el nodo de carga en 1 29889, 2.9894, 2.98956, 2.98958Q = pu. ........157
Figura 4.86 Atractor extraño en 1 2.989825Q = pu..................................................................158
Figura 4.87 Desaparición repentina del atractor extraño en 1 2.989826Q = pu. ......................158
Figura 4.88 Colapso de voltaje en el nodo de carga en 1 2.989826Q = pu. .............................159
Figura 4.89 Movimiento de los eigenvalores complejos conjugados......................................159
Figura 4.90 Diagrama de bifurcación del sistema con 3C = pu..............................................160
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
21/245
xviii
Figura 4.91 Diagramas de bifurcación del sistema para 1, 0.8, 0.6, 0.4m P = pu.....................161
Figura 4.92 Movimiento de las bifurcaciones Hopf................................................................162
Figura 4.93 Diagramas de bifurcación para diferentes valores del coeficiente de
amortiguamiento 0.05, 0.1 0.114 D y= . ........................................................................163
Figura 4.94 Sistema compensado con un CEV. ......................................................................164
Figura 4.95 Posición de las bifurcaciones para diferentes límites del compensador. .............165
Figura 4.96 Diagrama del sistema con el generador conectado en el nodo de carga. .............167
Figura 4.97 Diagrama de bifurcación utilizando un sistema de excitación lento....................169
Figura 4.98 Diagramas de bifurcación utilizando un sistema de excitación rápido................172
Figura 4.99 Voltaje en la carga para diferentes límites en el sistema de excitación. ..............172
Figura 4.100 Sistemas de excitación lento y rápido limitados en 1 fdr E = pu..........................173
Figura 4.101 Sistema de potencia compensado con un CEV más completo...........................174
Figura 4.102 Diagramas de bifurcación sin el CEV variando 1Q y 1 P . ..................................176
Figura 4.103 Soluciones periódicas inestables que presenta el sistema..................................176
Figura 4.104 Diagrama de bifurcación del sistema compensado con un CEV. ......................178
Figura 4.105 Colapso de voltaje en 1 7.3Q = pu. .....................................................................178
Figura 4.106 Diagramas de bifurcación con diferentes capacidades del CEV........................179
Figura 4.107 Diagrama de bifurcación con diferentes capacidades del CEV variando 1 P . ....180
Figura 4.108 Diagrama de bifurcación del sistema de potencia con el compensador de
capacidad ilimitada..........................................................................................................181
Figura 4.109 Diagrama de bifurcación para la demanda de potencia real 1 P . ........................181
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
22/245
xix
Índice de tablas
Tabla 1.1 Clasificación de la estabilidad en sistemas de potencia. .............................................3
Tabla 4.1 Parámetros utilizados en el sistema de potencia con carga dinámica (1)..................93Tabla 4.2 Eigenvalores que se presentaron en la bifurcación Saddle-Node............................109
Tabla 4.3 Parámetros del sistema máquina-bus infinito con excitación fija. ..........................111
Tabla 4.4 Eigenvalores del sistema en la bifurcación Saddle-Node........................................113
Tabla 4.5 Parámetros utilizados en el sistema máquina-bus infinito y control de excitación. 114
Tabla 4.6 Parámetros del sistema máquina-bus infinito con alto coeficiente de
amortiguamiento en el generador. ...................................................................................121
Tabla 4.7 Eigenvalores en la bifurcación Saddle-Node-Hopf.................................................122
Tabla 4.8 Parámetros del sistema de dos máquinas y línea de transmisión larga. ..................129
Tabla 4.9 Parámetros del sistema de dos máquinas-bus infinito.............................................135
Tabla 4.10 Eigenvalores del sistema en la bifurcación Saddle-Node......................................143
Tabla 4.11Parámetros del sistema de dos generadores con carga exponencial.......................146
Tabla 4.12 Eigenvalores del sistema en la bifurcación Saddle-Node......................................150
Tabla 4.13 Parámetros del sistema Carga – Generador con sistema de excitación.................151
Tabla 4.14 Parámetros utilizados en el sistema de potencia con carga dinámica (2)..............154
Tabla 4.15 Ubicación exacta de las bifurcaciones Hopf. ........................................................166Tabla 4.16 Parámetros del sistema de potencia con sistema de excitación lento....................169
Tabla 4.17 Parámetros utilizados en el sistema de potencia con sistema de excitación rápido.
.........................................................................................................................................171
Tabla 4.18 Parámetros utilizados en el sistema de potencia de 4 nodos. ................................176
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
23/245
xx
Objetivo
El objetivo de esta tesis es el análisis de inestabilidades angular y de voltaje en sistemas
eléctricos de potencia. Este análisis se realiza con base al modelado dinámico del sistema de
potencia, considerando las restricciones de estado estable y la teoría de bifurcación. Mediante
esta teoría, es posible predecir la pérdida de sincronismo y el colapso de voltaje dinámico y
estático sin necesidad de realizar simulaciones en el tiempo.
Justificación
El retraso en la construcción de plantas de generación y de la expansión de la red de
transmisión ha obligado a operar el sistema eléctrico cada vez más cerca de sus límites de
estabilidad. Esto ha provocado una gran preocupación por parte de los ingenieros que
planifican y operan el sistema, con relación a la confiabilidad y seguridad con que se operan y
controlan las redes de transmisión y distribución, ya que en algunas ocasiones estas se
encuentran en estado de alerta. En este nuevo contexto operativo, para varios sistemas
eléctricos se han reportado comportamientos anormales de las variables eléctricas que definen
su estado. Tales comportamientos han puesto de manifiesto que algunos procesos dinámicos
no son bien entendidos y por ende, no son considerados en herramientas computacionales de
operación y control de redes eléctricas.
La teoría de bifurcaciones y caos proporcionan una posible herramienta para interpretar
fenómenos complejos dinámicos presentes en sistemas eléctricos, así como su control. Así, en
esta tesis se describe de manera fundamental esta teoría y su aplicación al estudio de sistemaseléctricos, con la finalidad de observar los fenómenos de pérdida de síncronismo y colapso de
voltaje.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
24/245
1
Capítulo 1
Introducción
1.1 Introducción
Los sistemas eléctricos de potencia son grandes interconexiones de dispositivos que
intervienen en la generación, transmisión y distribución de la energía eléctrica. Estos tienen
como función principal mantener el voltaje y la frecuencia del sistema dentro de ciertos
márgenes operativos. Anteriormente, estos sistemas de potencia se diseñaban de manera que
los consumidores de energía se encontraran cerca de los puntos de generación, haciendo que la
operación de este tipo de sistemas fuera muy simple. Sin embargo, con el tiempo el contexto
operativo de los sistemas ha cambiado en forma radical, ahora los centros de generación están
cada vez más distantes de los centros de consumo, existe la apertura del sector eléctrico,
además de que presiones económicas, políticas y ambientales que han retrasado la expansión
del sistema.
Las condiciones anteriores han provocado que los sistemas eléctricos de potencia operen cada
vez más cerca de sus límites de estabilidad. El hecho de operar en estas regiones ha dado como
resultado el surgimiento de fenómenos dinámicos muy complejos no observados
anteriormente, provocando cambios significativos en la estabilidad del sistema, incluso
operando en regímenes normales.
El funcionamiento tan complejo de los sistemas de potencia depende de sus inherentes
características no lineales, de manera que el modelado de los elementos que lo conforman
debe ser basado en ecuaciones diferencial-algebraicas no lineales [1]. Dentro del estudio de
sistemas no lineales existen diferentes teorías que ayudan a entender los complejos
comportamientos dinámicos propios de estos sistemas, siendo una de las principales la teoría
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
25/245
2
de bifurcación [2]. Esta teoría permite conocer de manera cualitativa la manera en que se
afecta la estabilidad de un sistema no lineal, cuando acontecen pequeños cambios en las
variables de estado que determinan su punto de operación o equilibrio. Estos cambios de
estabilidad se pueden manifestar como pequeñas oscilaciones en las variables de estado, o
como un comportamiento caótico del sistema, ocasionando daños irreparables a los equipos,
principalmente en los rotores de los generadores.
Hasta ahora, una gran mayoría de las investigaciones enfocadas al estudio de inestabilidades
no lineales se han basado en la teoría de bifurcación. Con el uso de esta teoría, los
investigadores del área de sistemas eléctricos de potencia han tratado de explicar los
mecanismos del colapso de voltaje y la dinámica de este fenómeno. De lo trabajos más
representativos, en [3-5] se estudia el mecanismo del cambio de estabilidad del sistema basándose en la estabilidad de los puntos de equilibrio. Cuando estos puntos de equilibrio son
inestables se les llama puntos de bifurcación y producen estados de operación inestables de la
red. Asimismo, en base a simulaciones numéricas se explica la dinámica del proceso de
colapso de voltaje por medio de la bifurcación Saddle-Node, considerando un pequeño sistema
de potencia de 3 nodos. Basándose en este sistema eléctrico comienzan a surgir otras
investigaciones [6], encontrándose la existencia de diferentes tipos de bifurcaciones y
demostrándose que la bifurcación Saddle-Node no es el único mecanismo a través del cual se
produce el fenómeno de colapso de voltaje [7][8]. Basándose en estos trabajos, se empieza a
experimentar la manera en que se puede controlar la aparición de las bifurcaciones por medio
de la ayuda de generadores equipados con diferentes sistemas de excitación [9] y el uso de
dispositivos de electrónica de potencia [10-12].
Con respecto a la inestabilidad angular en los sistemas de potencia, explicada con la teoría de
bifurcación, también existen algunas investigaciones. En [13] se muestra como un sistema
máquina-bus infinito puede llegar a presentar oscilaciones no lineales de tipo estable,
fenómenos caóticos y pérdida de sincronismo. También, en [14], se muestra como el mismo
sistema máquina-bus infinito puede llegar a presentar bifurcaciones Hopf de tipo secundario,
originando oscilaciones de tipo cuasiperiódico.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
26/245
3
Con estas investigaciones, se observa que la teoría de bifurcación puede explicar los
fenómenos de colapso de voltaje y pérdida de sincronismo con base a la variación de
parámetros de los modelos dinámicos de sistemas de potencia.
1.2 Inestabilidades en sistemas eléctricos de potencia
Los primeros problemas de inestabilidad que fueron observados en los sistemas de potencia se
manifestaron en el ángulo de carga del rotor. Esta inestabilidad se puede presentar en forma de
oscilaciones electromecánicas no amortiguadas debidas a la falta de par de amortiguamiento o
en aceleramiento del rotor por falta de par de sincronización, perdiéndose el sincronismo. Las
oscilaciones electromecánicas que se presentan cuando se tiene pequeños disturbios, seclasifican como problemas de estabilidad de pequeña señal o de estado estable. La pérdida de
sincronismo del rotor se debe a grandes disturbios y se denomina estabilidad transitoria. Las
inestabilidades en sistemas de potencia pueden clasificarse de forma general en dos tipos: la
escala de tiempo y la causa de la inestabilidad [15], como lo muestra la Tabla 1.1. La escala de
tiempo de corto plazo se refiere a unos cuantos segundos, mientras que la escala de largo plazo
se refiere a varios minutos.
Tabla 1.1 Clasificación de la estabilidad en sistemas de potencia.
Escala de tiempo Generador Carga
Corto plazo(segundos)
Estabilidad angular del rotor:
Estado estable y Transitoria
Estabilidad de voltaje
Largo plazo(minutos)
Estabilidad de frecuencia Estabilidad de voltaje
La inestabilidad del ángulo del rotor se presenta en el corto plazo, debido a la dinámica
presente en el generador por algunos segundos. Con la finalidad de controlar una posible
inestabilidad, equipos tales como reguladores automáticos de voltaje y sistemas de excitación,
entre otros, actúan en este periodo de tiempo.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
27/245
4
sen E R ER ER ER
E E P
xδ =
En el largo plazo, se presentan dos problemas de estabilidad: el de frecuencia y el de voltaje.
El primero está relacionado con el desbalance de potencia entre la generación y la carga. El
segundo, es debido a la distancia eléctrica entre estas últimas, en combinación con la
deficiencia de potencia reactiva en el sistema. Esto último, ocasiona que la estabilidad de
voltaje también se presente en el corto plazo debido a que cargas dinámicas, tales como
motores de inducción o cargas controladas electrónicamente, pueden tener un consumo de
potencia reactiva importante durante periodos de tiempo muy cortos [15].
1.2.1 Inestabilidad angular
La estabilidad angular consiste en mantener en sincronismo el rotor del generador. La potencia
que un generador síncrono puede entregar cuando está conectado a un bus infinito por mediode una reactancia está dada por la siguiente ecuación [1]:
( 1.1)
Si los voltajes E E , RV y la reactancia ER se mantienen constantes, la potencia de transmisión
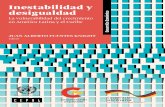
está determinada por el ángulo de par ERδ . En la Figura 1.1 se muestra esta característica de
transmisión de potencia.
Figura 1.1 Curva Potencia-Ángulo en un generador síncrono.
ERδ
ER P
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
28/245
5
Conforme el ángulo ERδ se incrementa, se tiene una mayor transferencia de potencia activa
ER P , hasta llegar al punto de máxima transferencia de potencia en 90 ERδ = ° . Si en este punto
el ángulo ERδ se incrementa, la transferencia de potencia decrece ocasionando una aceleración
en el rotor del generador. Lo anterior puede producir una pérdida de sincronismo, es decir, la presencia de una inestabilidad angular. Este tipo de inestabilidad es la más común ya que
puede ser ocasionada por disturbios en el sistema.
1.2.2 Inestabilidad de voltaje
Este tipo de inestabilidad se caracteriza por el llamado “colapso de voltaje”, y es muy especial
debido a que es de tipo catastrófico y en ocasiones repentino. Este tipo de fenómeno ocurre
principalmente en sistemas muy sobrecargados en los que ocurre una falla o que tienen un
gran déficit de potencia reactiva, la cual está ampliamente relacionada con el control de
voltaje. Frecuentemente, este fenómeno involucra todo el sistema de potencia y en ocasiones
sólo porciones de este; además, se ha encontrado que el colapso de voltaje involucra también
los ángulos de los generadores [16]. El déficit de potencia reactiva se debe al incremento de
este tipo de potencia en la demanda o a que algunos límites de dispositivos, tales como
generadores, capacitores y CEVs ya se han alcanzado. El incremento de la demanda de
potencia reactiva es el principal requisito para la presencia del colapso, por lo que a estefenómeno se le llega a llamar inestabilidad de carga. Otros causantes del fenómeno son la
acción de cambiadores de derivación en transformadores y salida de líneas o generadores [16].
La inestabilidad de voltaje ha sido ampliamente discutida y se ha llegado a definiciones dadas
por el IEEE y CIGRE como la siguiente [15]:
“ La inestabilidad de voltaje proviene del intento de las cargas dinámicas de restablecer elconsumo de potencia más allá de la capacidad de la transmisión y generación combinadas. ”
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
29/245
6
Cuando un sistema es estable en cierto punto de operación y se llega a tener disturbios, el
sistema frecuentemente llega a un nuevo punto de operación. Si el cambio es de tipo gradual o
muy lento (cuasiestático), normalmente el nuevo punto de operación se mueve o varía de la
misma forma, siendo esto lo más normal en la operación del sistema. Pero como la teoría de
bifurcación señala, no siempre los pequeños cambios producen un nuevo punto de operación
normal, es decir, no existe punto de operación estable para los nuevos parámetros del sistema.
Esta característica permite relacionar inestabilidades angulares y de voltaje con la teoría de
bifurcaciones.
El colapso de voltaje también puede ser causado por cambios en cascada en el sistema, por
ejemplo: los límites de potencia reactiva de los generadores pueden ser alcanzados en forma
consecutiva o los rotores de grandes motores de inducción pueden llegar a detenersesucesivamente. Estos cambios en cascada incrementan en gran medida el consumo de potencia
reactiva, accionando los sistemas de cambiadores de derivación en los transformadores,
ocasionándose un déficit de esta potencia en el sistema. Las salidas de generadores o líneas de
transmisión también son factores de gran importancia en el colapso de voltaje, debido a que se
pierde reserva de potencia reactiva, reduciéndose el nivel de cargabilidad del sistema.
1.3 Herramientas para el análisis de inestabilidades de voltaje
Debido a la importancia de este tipo de inestabilidad, en este campo se han desarrollado
diversos tipos de análisis. Estos últimos se pueden clasificar en tres:
• Aproximación estática.
• Aproximación de dinámica de pequeña señal.
• Aproximación de dinámica de gran señal.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
30/245
7
P PV
Q QV
J J P
J J Q V V
θ
θ
θ θ ∆ ∆ ∆ = = ∆ ∆ ∆
J
1.3.1 Aproximación estática
Este tipo de análisis se basa en la factibilidad del flujo de carga en el sistema de potencia. Las
ecuaciones utilizadas en este tipo de estudios son las ecuaciones algebraicas de flujos de
potencia. Existen cuatro técnicas o métodos de análisis basados en aproximaciones estáticas.
• Sensibilidad V-Q.
• Descomposición del valor singular.
• Análisis modal.
• Método continuación de flujos de potencia.
1.3.1.1 Sensibilidad V-Q
Esta técnica esta basada en las sensibilidades de voltajes nodales con respecto a inyecciones
de potencia reactiva nodales. Las sensibilidades positivas indican que el voltaje de bus se
incrementa con las inyecciones de potencias, tal que si todas las sensibilidades en todos los
buses son positivas se dice entonces que el voltaje del sistema es estable. Por el contrario, si al
menos una sensibilidad es negativa se dice que el sistema es inestable. Esta técnica es muy
limitada por el hecho de que no se pueden identificar los modos inestables del sistema y por lo
mismo no es muy utilizado en la valoración de la estabilidad de voltaje.
1.3.1.2 Descomposición del valor singular
Esta técnica parte de las ecuaciones de estado estable de flujos de potencia:
( 1.2)
de donde se toma la matriz Jacobiana, a la cual se le aplica la técnica de descomposición de
valor singular de la siguiente manera:
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
31/245
8
1
nT T
i i i
i
J U W uσ ω =
= =∑ ∑
{ }( ) ( ) 1,2,...,i J diag J i nσ = =∑
1 2 ... 0nσ σ σ ≥ ≥ ≥ ≥
( 1.3)
donde U y W son matrices ortogonales, iu y iω son las columnas de U y W
respectivamente. ∑ es una matriz diagonal definida por:
( 1.4)
donde 0iσ ≥ para todo i . Ordenando los elementos de esta matriz ∑ de la forma:
El mínimo valor singular ( )n J σ es la medida de qué tan cerca se está de la singularidad del
Jacobiano de flujos de potencia; en otras palabras, se puede entender como el límite de
estabilidad del estado estacionario. Cuando el mínimo valor singular es igual a cero la
solución de las ecuaciones de flujos de potencia no se puede obtener, esto es, la inversa de la
matriz Jacobiana no existe. Comúnmente, a este punto se le conoce como bifurcación estática.
1.3.1.3 Análisis modal
La técnica de análisis modal involucra algunos eigenvalores y sus eigenvectores asociados de
una matriz jacobiana de orden reducido. El método se basa principalmente en la magnitud de
estos eigenvalores como medida de inestabilidad y los eigenvectores proveen el mecanismo
por el cual se pierde la estabilidad de voltaje.
La teoría básica de la técnica consiste en evaluar la estabilidad del voltaje incrementando la
potencia reactiva, considerando que la potencia activa es constante en un punto de operación.
Partiendo de esto, en la ecuación ( 1.2) se considera 0 P ∆ = , de manera que:
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
32/245
9
1( )QV Q P PV RQ J J J J V J V θ θ −∆ = − ∆ = ∆
1 R QV Q P PV J J J J J θ θ
−= −
= Λ R J R L
1 RV J Q−∆ = ∆
i i
i i
R LV Qλ
∆ = ∆∑
( 1.5)
y,
( 1.6)
donde:
( 1.7)
R J se llama matriz jacobiana reducida del sistema. Esta última relaciona los cambios en
voltajes nodales debidos a incrementos en inyecciones de potencia reactiva.
Descomponiendo a R J de la forma:
( 1.8)
donde R y L son las matrices eigenvector derecha e izquierda de R J respectivamente. Λ es
la matriz diagonal de eigenvalores de R J . Así, la ecuación ( 1.6) se puede reescribir de la
siguiente forma:
( 1.9)
donde i R y i L son los i-ésimos eigenvectores derecho e izquierdo de R J . La magnitud de cada
eigenvalor iλ determina la debilidad del correspondiente voltaje modal. Entonces, cuando
0iλ = , el i-ésimo voltaje modal se colapsa.
Como se puede observar, la técnica de análisis modal así como la de descomposición del valor
singular son similares en la valoración de la estabilidad de voltaje.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
33/245
10
( , , ) x f x u t =
( , , ) 0h x u t =
( , , ) 0 g x u t ≤
( , , ) ( , , ) L x u N x H x u N u∆ = ∆ + ∆
1.3.1.4 Método de continuación de flujos de potencia
Este método es usado cuando las ecuaciones de flujos de potencia no pueden proveer
información acerca de la estabilidad del voltaje en sistemas sobrecargados. Esto se debe a que
los sistemas pueden presentar multiples soluciones en cualquier punto de operación, de modoque las ramas de soluciones son muy cercanas en condiciones de sobrecarga. El método de
continuación esta basado en el análisis del sistema original, de modo que al ir añadiendo la
complejidad en el sistema se obtiene la solución del sistema primitivo u original.
1.3.2 Aproximación de dinámica de pequeñas señales
Otro tipo de análisis de la estabilidad de voltaje, es cuando se consideran dispositivos
dinámicos. La dinámica de estos últimos es representada por ecuaciones diferenciales, las
cuales son linealizadas junto con las ecuaciones algebraicas o estáticas del sistema. Estas
ecuaciones linealizadas se utilizan para examinar la estabilidad del voltaje. Las ecuaciones de
un sistema no lineal, también llamado sistema de ecuaciones diferencial-algebraico (EDA),
son las siguientes:
Dinámica de generadores y cargas: ( 1.10)
Red de transmisión: ( 1.11)
Condiciones de operación: ( 1.12)
La forma general del modelo dinámico linealizado es la siguiente:
( 1.13)
donde ∆ y u∆ son perturbaciones alrededor del punto de operación. ( , , ) L x u N y ( , , ) H x u N
son las matrices del sistema y de la entrada linealizadas, las cuales dependen de las variables
de estado x y entradas u además de la red de transmisión N . La estabilidad del sistema se
mide a partir de los eigenvalores de ( , , ) L x u N .
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
34/245
11
( , , )
0 ( , , )
f x y
g x y
λ
λ
=
=
1.3.3 Aproximación de dinámica de gran señal
Esta técnica consiste en resolver la dinámica de un sistema multimáquina en un análisis en el
dominio del tiempo. Este análisis indica si para ciertas condiciones de operación, el sistema se
vuelve inestable conforme transcurre el tiempo. Las EDA a ser resueltas son de la forma:
( 1.14)
donde x es un grupo de variables de estado dinámicas, y es un grupo de variables
instantáneas del sistema y λ es un parámetro del sistema.
1.4 Planteamiento del problema
Para apreciar la dinámica de los sistemas de potencia y sus fenómenos de inestabilidad, el
primer paso es modelar en forma dinámica a los elementos que intervienen directamente en
estos fenómenos, haciendo uso del análisis de gran señal. Como resultado de este modelado,
se obtiene conjuntos de ecuaciones diferenciales y de ecuaciones algebraicas. Estos sistemas
de ecuaciones son, en general, altamente no lineales, tal que la teoría de bifurcación encaja
perfectamente para este tipo de análisis. Esta teoría consiste básicamente en mostrar como las
soluciones del sistema de potencia relacionadas con el punto de operación, ganan o pierden
estabilidad con respecto a la variación de parámetros.
Para la simulación de los sistemas de potencia modelados como sistemas dinámicos, se
utilizará el software XPPAUT [17], diseñado específicamente para realizar análisis en el
dominio del tiempo de sistemas no lineales. Este software tiene la capacidad de esquematizar
los diagramas de bifurcación, indicando soluciones estables e inestables de puntos deequilibrio, y si son de tipo periódico u oscilatorio. Además, es posible simular la dinámica de
cualquier punto del diagrama de bifurcación, pudiéndose observar claramente diversos tipos
de operación propios de los sistemas no lineales. Entonces, extrapolando todas estas
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
35/245
12
características a los sistemas de potencia, se podrá observar los fenómenos de pérdida de
sincronismo y colapso de voltaje producidos por cambios de estabilidad en todo el sistema.
Con respecto a la estabilidad, esta se puede evaluar también por medio de eigenvalores en
cualquier punto de operación en el diagrama de bifurcación, el software también proporciona
de manera visual la estabilidad del sistema por medio de los multiplicadores de Floquet.
Además, con el diagrama de bifurcación se puede mostrar claramente qué tan estable es el
sistema por medio de los distintos atractores que se tienen en cada región de operación.
1.5 Contenido de la tesis
En este primer capítulo, se ha indicado la importancia del estudio de las inestabilidades en
sistemas de potencia, además se muestra la diferencia entre la inestabilidad angular y de
voltaje. En cuanto al colapso de voltaje, se ha descrito brevemente las diversas técnicas o
métodos que se utilizan para la evaluación de la estabilidad de voltaje. En los capítulos
posteriores se describe el contenido de la tesis como sigue.
El capítulo 2 contiene la descripción del modelado de todos los elementos que intervienen en
la dinámica de los sistemas de potencia. Además, considera el modelado multimáquina
descrito por un conjunto de ecuaciones diferenciales y algebraicas (EDA) y la forma de
evaluar la estabilidad de forma local en un punto de operación. También se presenta la forma
en que estos sistemas pueden ser linealizados para poder realizar un análisis de estabilidad
local.
El capítulo 3 describe la teoría de bifurcación como herramienta de análisis de los sistemas no
lineales, los conceptos de puntos de equilibrio y órbitas periódicas así como su estabilidad.Además, se incluye una breve descripción de los diversos tipos de bifurcaciones locales y
globales que presentan los sistemas no lineales.
El capítulo 4 contiene todos los resultados de las simulaciones de los modelos matemáticos
que representan algunos sistemas de potencia. Estos resultados contienen diagramas de
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
36/245
13
bifurcación, dinámica del sistema en los puntos de operación más importantes y la posición o
movimiento de eigenvalores indicando los cambios en la estabilidad del sistema debida a la
variación de parámetros.
Por último, el capítulo 5 contiene las conclusiones a las que se ha llegado, las aportaciones que
se han hecho y los posibles trabajos futuros que esta tesis puede originar.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
37/245
14
Capítulo 2
Modelado de sistemas eléctricos de potencia
para análisis dinámico de gran señal
2.1 Introducción
La precisión del análisis de fenómenos eléctricos depende en gran medida de la precisión con
que se modela matemáticamente las relaciones voltaje-corriente en terminales de los diversos
dispositivos que integran el sistema eléctrico. En el pasado, el análisis de sistemas eléctricos
ha utilizado modelos muy simples, pero que permiten capturar la esencia del fenómeno
eléctrico bajo estudio. Sin embargo, con el desarrollo de métodos numéricos, análisis
matemático y herramientas computacionales, se ha propuesto modelos matemáticos más
sofisticados, a fin de calcular de manera más precisa la compleja interacción entre los
componentes eléctricos en estudios a gran escala.
Una forma de conocer el punto de operación de un sistema eléctrico de potencia, es analizarlo
en forma dinámica. Entonces debido a que los dispositivos que integran al sistema tienen
constantes de tiempo muy diferentes, el modelado de cada elemento dependerá del tipo de
estudio a realizar. En particular, puesto que los problemas de oscilaciones no lineales y
colapso de voltaje, abordados en este trabajo, son de dinámica lenta, se requiere un modelado
detallado de generadores síncronos, sistemas de excitación, cargas y dispositivos de control.
Por el contrario, como la dinámica de la red de transmisión es mucho más rápida que la de
estos componentes, es posible considerar que las variables de estado asociadas a la red varían
de manera instantánea con respecto a la variación de las variables de estado de los dispositivos
eléctricos mencionados.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
38/245
15
Esta característica física permite modelar las relaciones de voltaje-corriente en terminales de
las líneas de transmisión por medio de ecuaciones algebraicas no lineales. Basado en lo
anterior, el comportamiento global de oscilaciones no lineales y colapso de voltaje que
acontecen en un sistema eléctrico puede ser analizado mediante un conjunto de ecuaciones
diferencial algebraico (EDA).
En este capítulo se describe los modelos matemáticos de los dispositivos que tienen un mayor
impacto en el estudio de oscilaciones no lineales y colapso de voltaje. También, se presenta la
manera en que estos modelos se integran en una formulación unificada por medio de un
conjunto EDA y las condiciones que deben cumplirse para obtener una representación
equivalente dado solo por ecuaciones algebraicas o ecuaciones diferenciales. Asimismo, se
detalla la manera de obtener la estabilidad local del sistema, con base a su representaciónmatemática, tal que sea posible determinar cuantitativamente el tipo de oscilaciones no
lineales del sistema.
2.2 Modelado de Componentes
Para poder simular el comportamiento de un sistema de potencia es necesario modelar en
forma adecuada los elementos que lo conforman de manera que se puedan obtener resultados
más precisos acerca de la operación completa del sistema. A continuación, se hace una breve
revisión de los elementos que se utilizarán en las simulaciones.
2.2.1 Generador síncrono
El generador síncrono es la principal fuente de potencia reactiva teniendo un gran impacto en
la obtención de un perfil de voltaje apropiado en el sistema eléctrico de potencia. Entonces,sus características y limitaciones son de gran importancia para el análisis de estabilidad de
voltaje y oscilaciones no lineales.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
39/245
16
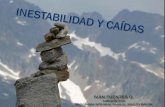
Un generador puede ser representado como una gran masa rotatoria con dos pares actuando
sobre la rotación de manear opuesta, tal como se muestra en la Figura 2.1.En este caso, el par
mecánico, mT , tiende a acelerar o incrementar la velocidad de rotación, Rmω , mientras que eT ,
el par eléctrico, disminuye esta velocidad.
Figura 2.1 Pares mecánicos y eléctricos en una unidad generadora.
El par mecánico es producido por la acción de un sistema gobernador turbina, tal que puede
ser ajustado de acuerdo a la dinámica del gobernador, influyendo directamente en la velocidad
del rotor, Rmω . Cuando no se considera la acción del gobernador, el par mecánico permanece
constante.
El par eléctrico es producido por la interacción existente entre los campos magnéticos producidos por las corrientes circulantes entre el rotor y estator. La corriente en el devanado
de campo crea una fuerza magnetomotriz ( fmm ) en el eje directo del rotor. Si existe flujo de
corriente en los devanados amortiguadores situados en los ejes directo y de cuadratura del
rotor, esta producirá fmms en estos ejes, respectivamente. Estas tres fmms del rotor giran a la
misma velocidad del rotor. Debido a que el campo magnético asociado a estas fmms tiene una
distribución senoidal a lo largo del entrehierro del generador, y varía en el tiempo por la
rotación del rotor, se inducen voltajes en los devanados estáticos del estator dando lugar acorrientes de armadura que producen un campo magnético giratorio en el estator. En estado
estable, este campo magnético gira a la misma velocidad del rotor y se le llama velocidad
síncrona 0mω . La interacción de ambos campos magnéticos giratorios da lugar al par eléctrico
eT .
Turbina Generador
eT mT
Energia
Electrica
Energia
ecanica
´
´
´
´
Rmω
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
40/245
17
2.2.1.1 Ejes de referencia
Como se ilustra en la Figura 2.2, al tener un conjunto de devanados estáticos representado por
las fases a, b y c, y otros en el rotor, que se desplazan con respecto a los primeros en forma
angular, es pertinentemente describir las diversas referencias para medir dicho
desplazamiento.
Figura 2.2 Diagrama esquemático de los devanados de un generador.
La Figura 2.3 muestra los ángulos considerados en un instante de tiempo cualquiera.
Figura 2.3 Ángulos y referencias para la máquina síncrona.
eje A
eje d
eje qeje C
eje B
a
b′
c
a′
b
c′
d k
F
F ′
d k ′
θ
mδ mα
mθ eje A
eje d
eje de Referencia Bus
eje q
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
41/245
18
0 0m m t θ ω θ = +
0 0m m t α ω α = +
2m m mπ
θ δ α + = +
El eje de la fase de armadura a es considerado como el eje de referencia estacionario. El
movimiento angular del rotor, caracterizado por el ángulo mecánico mθ , es medido con
respecto al eje de referencia estacionario del estator. Consecuentemente, mθ se incrementa
continuamente con el tiempo y a la velocidad de sincronismo, tal que puede ser definidocomo:
( 2.1)
donde mθ es el ángulo instantáneo entre los ejes d y A . 0θ es el valor inicial de mθ .
De igual manera, es conveniente definir un eje de referencia bus girando a la velocidad
síncrona 0m t ω . El movimiento angular de este eje con respecto al eje estacionario es definido
por la ecuación:
( 2.2)
donde mα es el ángulo instantáneo del eje de referencia bus con respecto al eje A . 0α es la
condición inicial dem
α .
Debido a que, durante procesos transitorios, el ángulo del rotor mθ no se incrementa
uniformemente con respecto al eje estacionario conforme transcurre el tiempo, es conveniente
expresar la posición angular del rotor con respecto al eje de referencia que gira a la velocidad
síncrona; es decir, la aceleración o desaceleración del rotor al ocurrir un evento transitorio.
Con base a la Figura 2.3, la relación entre ambas posiciones es dada por:
( 2.3)
Donde mδ es el desplazamiento angular del rotor, en radianes mecánicos, con respecto al eje
de referencia bus, girando a velocidad síncrona. Como se observa en la Figura 2.3, este ángulo
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
42/245
19
0 0
2
m
π θ δ α = + −
0 0 2m m mt
π θ ω δ α = + + −
0m m
m
d d
dt dt
θ δ
ω = +
2 2
2 2m md d
dt dt
θ δ =
del rotor se mide entre el eje de cuadratura de la máquina y el eje de referencia de Bus.
Substituyendo la ecuación ( 2.2) en ( 2.3) se obtiene:
( 2.4)
de tal manera que ( 2.1) se convierte en:
( 2.5)
Al derivar la ecuación ( 2.5) con respecto al tiempo se obtiene:
( 2.6)
donde md
dt
θ es la velocidad angular del rotor con respecto al eje estacionario A y m
d
dt
δ es la
velocidad angular del rotor con respecto al eje de referencia Bus. Es claro que md
dt
δ será
diferente de cero sólo en eventos transitorios; es decir, esta cantidad o término representa la
desviación de la velocidad del rotor con respecto a la velocidad síncrona. Por lo tanto, en
estado estable la velocidad del rotor es igual a la velocidad de sincronismo. La aceleración del
rotor se obtiene al derivar la ecuación ( 2.6) con respecto al tiempo, es decir:
( 2.7)
2.2.1.2 Ecuación de oscilación
De acuerdo a lo descrito en la sección anterior, cuando el sistema se encuentra operando en
estado estable, los generadores conectados en el sistema se encuentran girando a la velocidad
de sincronismo; esto es, el rotor gira a la misma velocidad que el campo del estator. Sin
embargo, cuando ocurre algún disturbio la velocidad del rotor es diferente a la velocidad
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
43/245
20
2 2
2 2m m
a
d d T J J
dt dt
θ δ = =
a m e d T T T T = − −
2 2
2 2m m
Rm Rm a m ge d
d d J J P P P P
dt dt
θ δ ω ω = = = − −
síncrona, produciéndose un cambio en la diferencia angular en los campos magnéticos del
rotor y estator. Lo anterior origina variaciones entre los pares mecánicos y eléctricos,
originándose oscilaciones de potencia eléctrica en el sistema. La ecuación que representa esta
dinámica del rotor, con respecto a la velocidad de sincronismo, es llamada ecuación de
oscilación. Esta ecuación es esencialmente la segunda ecuación de Newton, la cual establece
que el par de aceleración del rotor es el producto escalar de su momento de inercia y su
aceleración angular, es decir:
( 2.8)
Donde J es el momento de inercia de la masa del rotor en Kg-m2.
De manera análoga, el par de aceleración puede ser expresado como la diferencia entre el par
mecánico y el par eléctrico, así como el par de amortiguamiento d T debido al acoplamiento
entre la turbina y el rotor del generador. Entonces, una expresión alternativa para el par de
aceleración aT es:
( 2.9)
donde los pares actuando sobre el rotor están expresados en N-m.
Debido a que la potencia es igual al producto de la velocidad angular del rotor y el par, las
ecuaciones ( 2.8) y ( 2.9) pueden ser expresadas como:
( 2.10)
donde m P , ge P y d P son las potencias mecánica de entrada, eléctrica de salida y de
amortiguamiento, respectivamente, en Watts. a P es la potencia de aceleración y Rm J ω es el
momento angular del rotor en Joules-segundo por radianes mecánicos. Cuando el rotor está
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
44/245
21
2 2
2 2m m
a m ge d
d d M P P P P
dt dt
θ δ = = = − −
20 0
(3 ) (3 ) (3 )
1 1
2 2 sm m
k
B B B
J M W
H S S S φ φ φ
ω ω
= = =
2
(3 ) 20
2MWm B a m ge d
m
d H S P P P P
dt φ
δ
ω = = − −
2
20 (3 ) (3 )
2 pum ge d m a
m B B
P P P d P H
dt S S φ φ
δ
ω
− −= =
girando a velocidad síncrona 0mω , el momento angular es denominado constante de inercia
.
En el sentido estricto de la palabra, no es constante debido a que depende de la velocidad
angular Rmω , la cual no es igual a la velocidad síncrona 0mω bajo condiciones de perturbación.
Sin embargo, en la práctica Rmω no difiere significativamente de 0mω hasta que la estabilidad
se pierde. Por lo tanto, la ecuación ( 2.10) puede ser escrita como:
( 2.11)
En estudios dinámicos, es factible encontrar como dato a la constante de inercia, H , la cual
relaciona la energía cinética almacenada en el generador con su capacidad nominal de
potencia. Matemáticamente se tiene:
( 2.12)
De tal manera, solucionando ( 2.12) para la constante de inercia y sustituyendo en ( 2.11) se
obtiene:
( 2.13)
Finalmente, dividiendo la ecuación ( 2.13) sobre (3 ) BS φ :
( 2.14)
De la ecuación anterior, se puede hacer las siguientes observaciones:
• mδ es expresado en radianes mecánicos en el numerador mientras que 0mω es
expresado en radianes mecánicos por segundo en el denominador. Esto implica que la
ecuación ( 2.14) es independiente de la manera en que esté definido el ángulo; es decir,
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
45/245
22
2
20
2 pua m ge d
H d P P P P
dt
δ
ω = = − −
0
0
2 a m ge d
R
H d P P P P dt
d
dt
ω ω
δ ω ω ω
= = − −
= − =
mδ y 0mω tienen unidades consistentes las cuales pueden ser expresadas en ángulos
mecánicos o eléctricos.
• La constante H tiene unidades en segundos, como es patente en la ecuación ( 2.12).
En este casok
W tiene unidades en megajoule por segundo, la cual es normalizada por
los MVA nominales de la máquina. Asimismo, la variable t está en segundos.
• Los términos de las potencias están normalizados sobre la misma base de H .
En base a las tres observaciones anteriores, la ecuación ( 2.14) puede expresarse como:
( 2.15)
donde δ denota el ángulo del rotor en radianes eléctricos y 0ω es la velocidad síncrona en
radianes eléctricos por segundo.
La ecuación ( 2.15) es llamada ecuación de oscilación de la máquina síncrona, y representa la
dinámica rotacional de la misma. Esta ecuación diferencial de segundo orden puede ser escrita
como dos ecuaciones diferenciales de primer orden:
( 2.16)
donde ω es la velocidad relativa de la velocidad angular del rotor con respecto a la velocidad
síncrona.
Para propósitos de análisis, es común asumir que la potencia mecánica m P es constante. Las
potencias eléctrica y de amortiguamiento son obtenidas de la siguiente manera.
-
8/18/2019 Analisis de Inestabilidad en Sistemas Eléctricos
46/245
23
0( )d m ad d
P D Ddt dt
δ δ ω = + +
d
d P D
dt
δ =
2
1
1
( cos( ) sen( ))
( sen( ) cos( ))
i
n
gei i ii i j ij i j ij i j
j j i
m
i k ik i k ik i k
k k i
L
P V G VV G B
VV G B
P
δ δ δ δ
δ θ δ θ
=≠
=≠
= + − + −
+ − − −
+
∑
∑
La ecuación que describe a la potencia d P se basa en la suposición de que el amortiguamiento
está compuesto de dos partes: el amortiguamiento mecánico y el asíncrono. El primero se
considera proporcional a la velocidad del rotor, y el segundo se considera proporcional a la
desviación de la velocidad con respecto a la de sincronismo. Con base a estas consideraciones,
la ecuación de la potencia de amortiguamiento es:
( 2.17)
El término 0m D ω corresponde a las pérdidas de potencia por fricción. Es común restar este
término