Calculos Cruz de Malta Posicion Velocidad Aceleracion
16
TRABAJO DE MECANISMOS MECANISMO DE CRUZ DE MALTA ANALISIS DE POSICION, VELOCIDAD Y ACELERACIÓN Presentado por: ALFONSO SERRANO TAPIA T00019996 JULIÁN BERRIO HERRERA T00020143 TRIANA CASTRO MARTÍNEZ T00020562 Presentado a: EUGENIO YIME UNIVERSIDAD TECNOLOGICA DE BOLIVAR CARTAGENA, BOLIVAR - COLOMBIA 13-MARZO-2012
-
Upload
edgartoga2 -
Category
Documents
-
view
232 -
download
19
description
diñseo ruz de malta
Transcript of Calculos Cruz de Malta Posicion Velocidad Aceleracion

TRABAJO DE MECANISMOS
MECANISMO DE CRUZ DE MALTA
ANALISIS DE POSICION, VELOCIDAD Y ACELERACIÓN
Presentado por:
ALFONSO SERRANO TAPIA T00019996
JULIÁN BERRIO HERRERA T00020143
TRIANA CASTRO MARTÍNEZ T00020562
Presentado a:
EUGENIO YIME
UNIVERSIDAD TECNOLOGICA DE BOLIVAR
CARTAGENA, BOLIVAR - COLOMBIA
13-MARZO-2012

INTRODUCCION
En el siguiente análisis que haremos, desarrollaremos los cálculos pertinentes e ilustraremos los resultados que definen el comportamiento del mecanismo de la cruz de malta, conocido como el mecanismo de las manijas del reloj; usaremos la herramienta computacional SciLab y Solid Edge para ilustrar las graficas que resultaron de los cálculos realizados.
Es de mucha importancia realizar este análisis ya que nos ayudará a profundizar y afianzar el método de solución de este tipo de mecanismos, y nos reforzará para futuros problemas que tengamos que resolver en el transcurso de la materia de mecanismos y en la vida profesional como Ingenieros Mecánicos.
OBJETIVOS
Realizar los cálculos correspondientes para describir el comportamiento del mecanismo.
Realizar un Análisis de Posición, Velocidad y Aceleración para cada parte que compone el mecanismo.
Desarrollar un Algoritmo usando la plataforma de SciLab para ilustrar de manera gráfica el comportamiento del mecanismo a través del tiempo.
Construir un modelo tridimensional (3D) del mecanismo en el programa Solid Edge y realizar el respectivo análisis de movimiento usando la extensión Dynamic Designer.
Realizar una comparación gráfica de las ilustraciones dadas tanto por SciLab con nuestros cálculos, como por Solid Edge con nuestro modelo tridimensional.

MECANISMO DE CRUZ DE MALTA
Análisis de Posición
A continuación mostraremos el proceso que se hizo para obtener los ángulos de cada vector:
r1= r3+ r3
r1 ej θ1=r3 e
j θ2+r3 ej θ3
r1 cosθ1=r2 cosθ2+r3 cosθ3
El angulo θ3 es conocido, ya que ese ángulo no cambiará nunca, lo tomamos como cero, por lo tanto:
(1) r1 cosθ1=r2 cosθ2+r3
0,75cosθ1=1,235cosθ2+1,58(cos0)
r1 sinθ1=r2 sinθ2+r3 sinθ3
(2) r1 sinθ1=r2 sinθ2
0,75 sinθ1=1,235 sinθ2
Tenemos ahora dos ecuaciones (1) y (2), que tienen dos incógnitas.
r1
r3r2
r10,75in
1,5282in
0,61in
2,47inr3 :1,5282
r2 :1,235∈¿r1 :0,75∈¿

Procedemos a resolver las dos ecuaciones mencionadas:
r12=( r2cos θ2 )2+2 ( r2cos θ2 ) (r3 )+r3
2+( r2 sinθ2 )2
r12=r2
2+2 (r 2cosθ2 ) ( r3 )+r32
r12−r2
2−r32+2 (r2 cosθ2 ) (r3 )=0
θ2=cos−1( r2
2+r32−r1
2
2 r2r3 )θ2=cos
−1 (0,87 )
θ2=29°
Ahora con el ángulo que obtuvimos, lo reemplazamos en la ecuación numero 2, para hallar la otra incógnita θ1:
r1 sinθ1=r2 sinθ2
θ1=sin−1( r2 sinθ2r1 )
θ1=sin−1 (0,79 )
θ1=53 °
Análisis de Velocidad
A continuación con los datos obtenidos del análisis de posición, mostraremos los pasos que seguimos para determinar las velocidades angulares.
2 rev en23 sg
2 rev23 seg
∗60 seg
1min=5,2
rpm∗2π1 rev
∗1min
60 seg=0,54
radseg
w1=0,54radseg
Teniendo el lazo vectorial, procedemos a derivarlo:
r1 ej θ1=r3 e
j θ2+r3 ej θ3

r1w1 j (ej (θ1+90 ° ) )=r2 (e j θ2 )+r 2w2 j (e
j (θ2+ 90° ) )+r3w3 j (ej (θ3+ 90° ) )
Pero w3=0, ya que se mantienen fijos; por lo tanto:
r1w1 j (ej (θ1+90 ° ) )=r2 (e j θ2 )+r 2w2 j (e
j (θ2+ 90° ) )
De la anterior ecuación, tenemos como incógnitas: r2 , w2
r1w1@(θ¿¿1+90 °)=r2@θ2+r2w2@(θ¿¿2+90)¿¿
r1w1@143 °=r 2@29 °+r2w2@119 °
Ahora para eliminar r2, multiplicamos por: ¿…;1@119°>¿
0,54∗0,75cos (143−119 )=r2 cos (29−119)+r 2w2cos (119−119 )
0,913=0+1,235w2
w2=0,739
Ahora para eliminarw2, multiplicamos por: ¿…;1@209 °>¿
r1w1 cos (143−209 )= r2cos (29−209 )
r1w1 cos (−66 )=r2 cos (−180 )
r2=−(r¿¿1w1cos (−66 ))¿
r2=−0,41
Análisis de Aceleración
Luego de realizar el respectivo análisis para conocer las velocidades angulares que se presentan en el mecanismo, usamos el lazo vectorial de posición y lo derivamos 2 veces para así obtener el lazo vectorial que define las aceleraciones que están presentes en el mecanismo:
r1w1 j (ej (θ1+90 ° ) )=r2 (e j θ2 )+r 2w2 j (e
j (θ2+90° ) )
α 1r1 ej (θ1+90 °)+r 1w1e
j (θ1+90 ° )+r1w12 e
j (θ1+180 ° )=r2 ej θ2+ r2w2 e
j (θ2+90° )+r2w2 ej (θ2+90° )+α 2180°ntes enelmecanismo :que definelas aceleracionesqueestan ismo,usamos la derivadade la posicion r2e
j (θ2+90 ° )+r2w22 e
j (θ2+180 ° )

Tenemos que la aceleración α 1 y la velocidad r1, son cero, ya que posee una velocidad constante y como se está hablando de un mismo cuerpo, no posee una velocidad relativa en el.
r1w12 e
j (θ1+180° )=r 2ej θ2+2 r2w2 e
j (θ2+90° )+α 2180°ntes enelmecanismo :quedefine las aceleracionesqueestanismo ,usamos la derivadade la posicionr 2ej (θ2+90 ° )+r2w2
2 ej (θ2+180 ° )
θ1=53 °; θ2=29°; w1=0,54; w2=0,739 ; r2=−0,41
Reemplazamos los anteriores valores en la ecuación y resolvemos:
0,75¿
0,2187@143°=r2@29 °−0,606@119 °+0,75α2@119°+0,674@119°
Tenemos dos incógnitas que son: r2y α 2
Ahora para eliminarr2, multiplicamos por: ¿…;1@119°>¿
0,2187cos (143−119 )=−0,606cos (119−119)+0,75α 2cos (119−119)+0,674 cos (119−119)
0,199=−0,606+0,75 α2+0,674
α 2=0,1310,75
α 2=0,174rad
s2
Ahora para eliminarα 2, multiplicamos por: ¿…;1@209 °>¿
0,2187cos (143−209 )=r2 cos (29−209)
r2=0,0889−1
=−0,0889 ¿s2
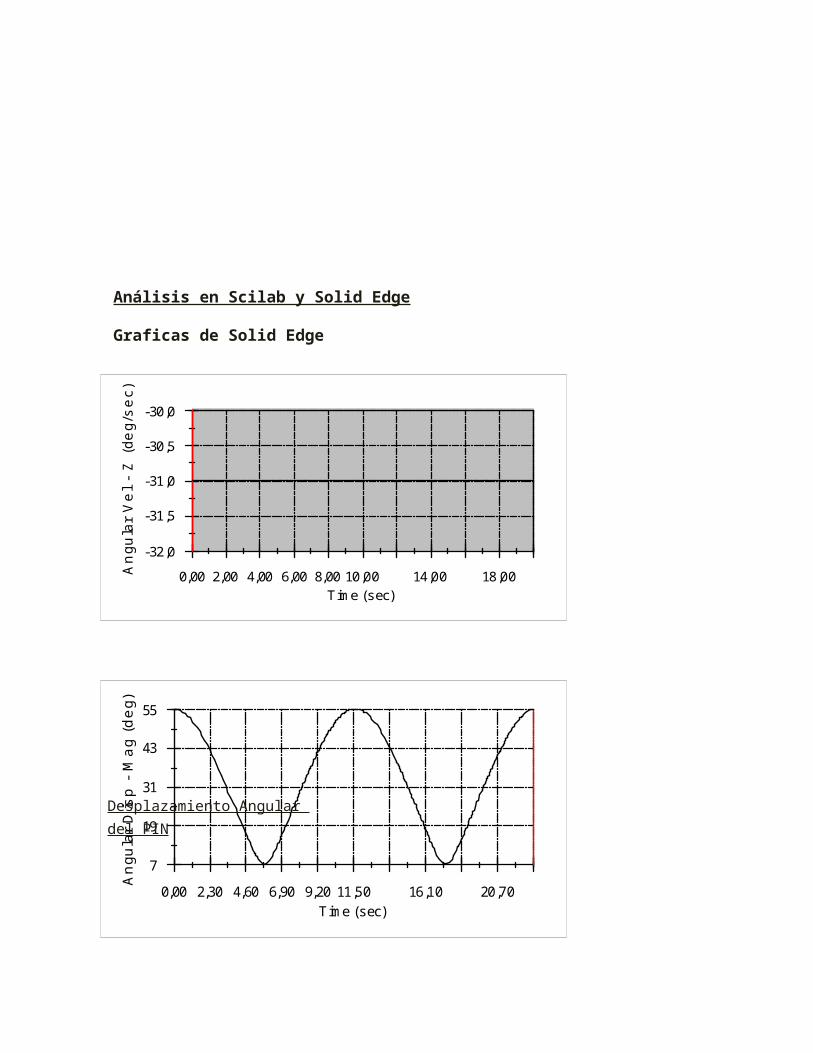
Análisis en Scilab y Solid Edge
Graficas de Solid Edge
0,00 2,30 4,60 6,90 9,20 11,50 16,10 20,70Time (sec)
7
19
31
43
55
An
gula
r D
isp
- M
ag
(de
g)
Velocidad Angular de Entrada
0,00 2,00 4,00 6,00 8,00 10,00 14,00 18,00Time (sec)
-32,0
-31,5
-31,0
-30,5
-30,0
An
gula
r V
el
- Z
(de
g/s
ec)
Desplazamiento Angular del PIN
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99
-300
-200
-100
0
100
200
300
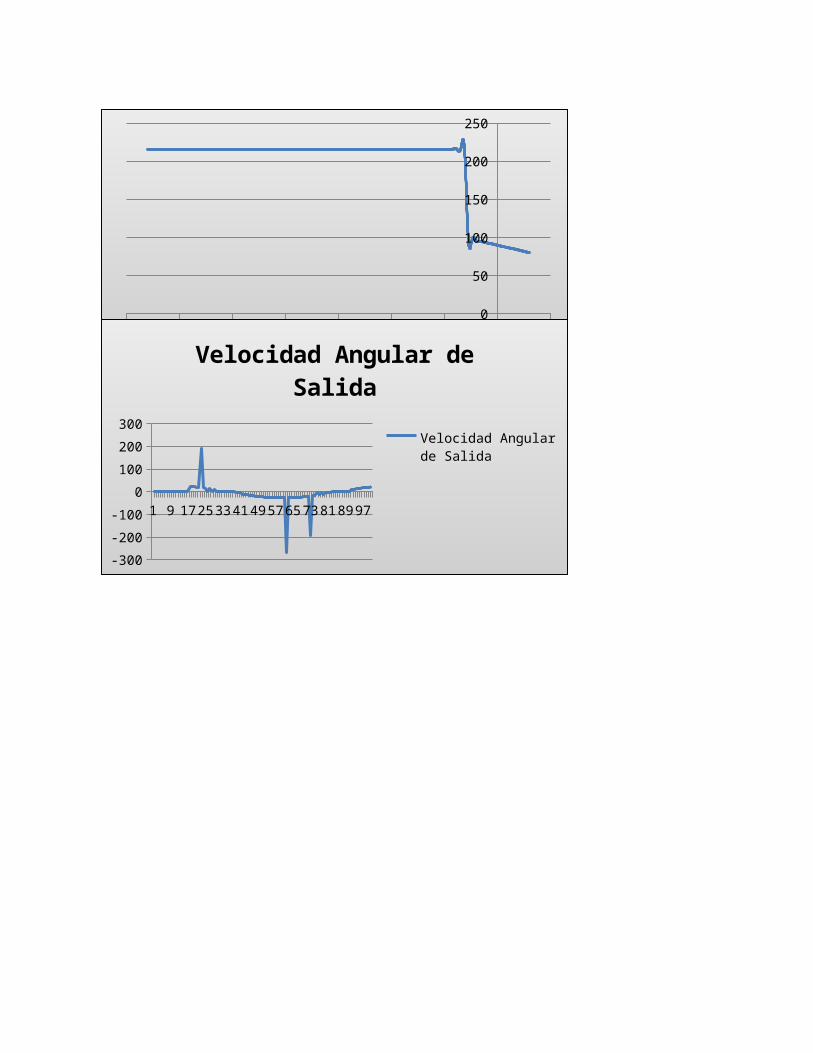
Velocidad Angular de Salida
Velocidad Angular de Sal-ida
-350 -300 -250 -200 -150 -100 -50 0 500
50
100
150
200
250
Angulo de entrada (X) vs Angulo de salida (Y)
Velocidad Angular de Salida
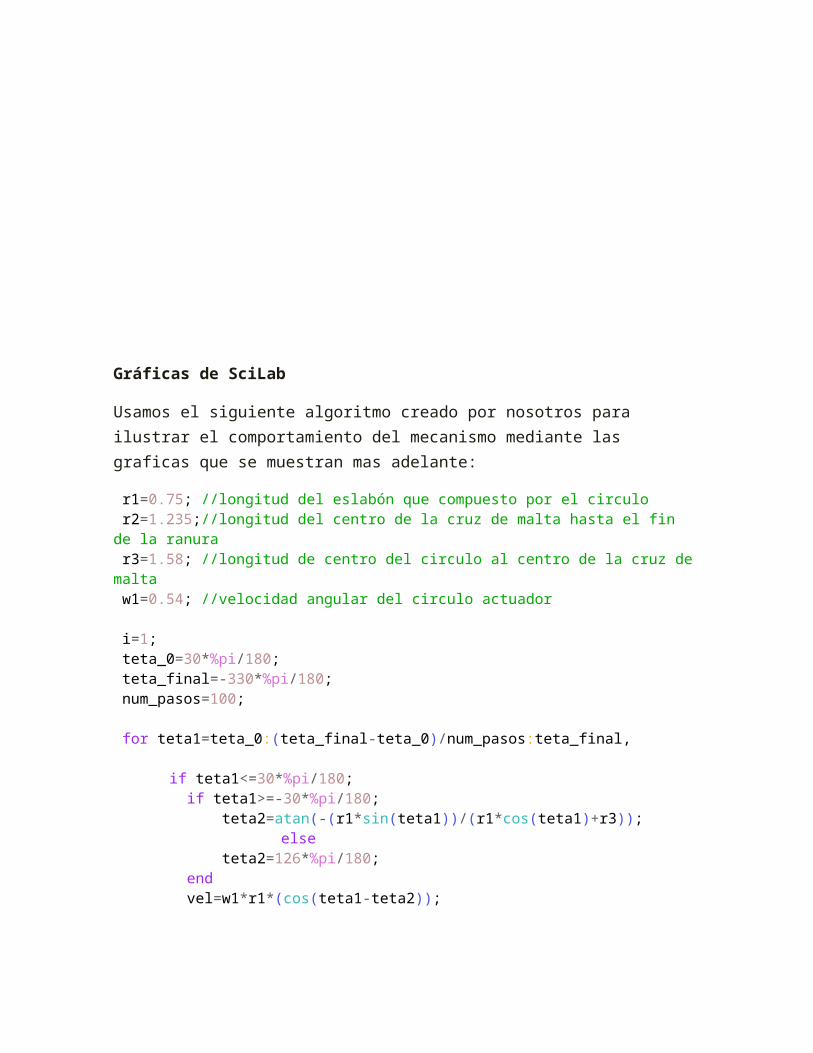
Gráficas de SciLab
Usamos el siguiente algoritmo creado por nosotros para ilustrar el comportamiento del mecanismo mediante las graficas que se muestran mas adelante:
r1=0.75; //longitud del eslabón que compuesto por el circulo r2=1.235;//longitud del centro de la cruz de malta hasta el fin de la ranura r3=1.58; //longitud de centro del circulo al centro de la cruz de malta w1=0.54; //velocidad angular del circulo actuador i=1; teta_0=30*%pi/180; teta_final=-330*%pi/180; num_pasos=100; for teta1=teta_0:(teta_final-teta_0)/num_pasos:teta_final,
if teta1<=30*%pi/180; if teta1>=-30*%pi/180; teta2=atan(-(r1*sin(teta1))/(r1*cos(teta1)+r3)); else teta2=126*%pi/180; end vel=w1*r1*(cos(teta1-teta2)); w2= ((w1*r1*(sin(teta1)+cos(teta1)))-(vel*(sin(teta2-(%pi/2))+cos(teta2-
(%pi/2)))))/(r2*(sin(teta2)+cos(teta2))); A1(i)=((teta1*180)/%pi) A2(i)=((teta2*180)/%pi)+90 wa(i)=w2
t(i)=i i=i+1;
end end plot(A1,A2); xtitle("la grafica del angulo de entrada en funcion del tiempo","A1 angulo de entrada","A2 angulo de salida" ); scf
plot (wa)
Angulo de Entrada vs Angulo de Salida
Velocidad Angular de Salida

Fotos Del Mecanismo



CONCLUSION
De la anterior practica que realizamos, analizando el comportamiento del mecanismo de la cruz de malta, comúnmente conocido como el mecanismo de las manijas del reloj, aprendimos y afianzamos los procedimientos y conceptos para conocer el comportamiento dinámico de cada uno de los componentes, analizamos un mecanismo simple, obteniendo como resultado, datos concisos y que demuestran de manera eficaz el movimiento del mecanismo.
Nos ayudó mucho resolver este análisis tanto para la clase de mecanismos como para nuestra vida profesional, es un tema de mucha importancia y que influye mucho en la ingeniería mecánica y a la hora de resolver un problema dinámico.