DISEÑO MECÁNICO Y CONSTRUCCIÓN DE...
107
UNIVERSIDAD CENTROAMERICANA “JOSÉ SIMEON CAÑAS” DISEÑO MECÁNICO Y CONSTRUCCIÓN DE SISTEMA KAREL TRABAJO DE GRADUACIÓN PREPARADO PARA LA FACULTAD DE INGENIERÍA Y ARQUITECTURA PARA OPTAR AL GRADO DE INGENIERO MECÁNICO POR: JOAQUIN FERNANDO GUZMÁN SARMIENTO HERBERT ADALBERTO CARDONA GONZALEZ OCTUBRE 2008 ANTIGUO CUSCATLAN, EL SAVADOR, C.A.
Transcript of DISEÑO MECÁNICO Y CONSTRUCCIÓN DE...

UNIVERSIDAD CENTROAMERICANA
“JOSÉ SIMEON CAÑAS”
DISEÑO MECÁNICO Y CONSTRUCCIÓN DE SISTEMA KAREL
TRABAJO DE GRADUACIÓN PREPARADO PARA LA
FACULTAD DE INGENIERÍA Y ARQUITECTURA
PARA OPTAR AL GRADO DE
INGENIERO MECÁNICO
POR:
JOAQUIN FERNANDO GUZMÁN SARMIENTO
HERBERT ADALBERTO CARDONA GONZALEZ
OCTUBRE 2008
ANTIGUO CUSCATLAN, EL SAVADOR, C.A.

RECTOR
JOSÉ MARÍA TOJEIRA, S.J.
SECRETARIO GENERAL
RENÉ ALBERTO ZELAYA
DECANO DE LA FACULTAD DE INGENIERÍA Y ARQUITECTURA
EMILIO JAVIER MORALES QUINTANILLA
COORDINADOR DE LA CARRERA DE INGENIERÍA MECÁNICA
MARIO WILFREDO CHÁVEZ MOLINA
DIRECTOR DEL TRABAJO
LUIS ROBERTO DELEÓN RUÍZ
LECTOR
MARIO WILFREDO CHÁVEZ MOLINA

AGRADECIMIENTO
El resultado arduo de estos últimos días de formación académica, merece agradecerse a las
bendiciones de Dios y su amor, a aquellas personas que me apoyaron y apoyan; en todo el
sentido de la palabra “mis padres”, Fernando Guzmán y Mélida Sarmiento quienes me dieron
ánimos y pusieron ideales en mi cabeza para conquistar mis metas e hicieron posible que obtuviera
esta profesión; a mi hermano Hazael por su incondicional apoyo, a mis amigos que no necesito
nombrarlos porque sé que se dan por aludidos. A todos aquellos profesores que realmente aman lo
que hacen y que forjaron en mí, pasión por hacer lo que más se ama.
Agradecer a Don Alex Vejar y su equipo de trabajo por todo su apoyo y conocimiento que nos
brindó, en aquellos momentos de incertidumbre que vivimos durante la realización del presente
trabajo; por enseñarnos mucho en el ámbito del diseño y la manufactura.
Joaquín Fernando Guzmán Sarmiento


i
RESUMEN EJECUTIVO
El presente trabajo incluye una descripción de la elaboración del sistema karel, que está constituido
por una serie de etapas, desde el principio del diseño hasta la construcción; se tratará de explicar
de manera compacta cada una de estas etapas.
El lector debe de comprender que en el ámbito del diseño se tiene una infinidad de formas para
crear, pero en este caso tomamos una en particular que cumpla con las necesidades, para nuestro
caso se diseñó un prototipo denominado “karel”, el cual tiene como objetivo principal la ayuda a
estudiantes de computación en el ámbito de la programación estructurada, es decir, que el sistema
karel convierte en realidad todos los códigos y comandos que se ejecutan desde un ordenador.
Este sistema posee las funciones básicas de movimiento tales como: girar a la izquierda, avanzar,
recoger, almacenar y expulsar tokens o fichas, pues ya que en el mundo virtual karel es un robot
que avanza por calles y avenidas cuyo objetivo es la recolección de fichas.
Cabe mencionar que con la elaboración de este sistema, las piezas que componen a karel están
sometidas a deterioro, ya sea por el polvo, el ambiente de trabajo, etc. Por lo tanto se les debe de
programar un mantenimiento, es decir revisar dichas piezas en un promedio de un año, si su uso
es extenuante.
Capítulo I. En este capítulo se abordó básicamente, que significa el sistema karel, los principales
objetivos generales y específicos, y además se determinó la ejecución de una serie de
movimientos que tendrá dicho sistema; estos movimientos son el punto de partida para el diseño y
forman parte esencial de los mínimos requerimientos que éste diseño necesita. En este apartado
se especifica con claridad que es lo que se quiere de este sistema para pensar en un diseño en
especial.
Capítulo II. En este capítulo se contempla el diseño giro, avance y chasis del sistema; en lo que
respecta a componentes del diseño esta es la piedra angular, pues en este apartado deben de
elegirse muy bien los componentes (motores) que proporcionarán movimiento al robot, aquí
quedará definido la posición de los motores así como también la forma geométrica del chasis. Este
apartado es bastante iterativo, pues ya que se juega mucho con diseños a nivel virtual (software
como Autocad) y al someter al prototipo a la realidad generalmente siempre existen discrepancias
entre ambos modelos (virtual y real). Se requiere de pruebas experimentales para poder ir
soslayando posibles percances en la continuación del diseño.
Capítulo III. En este apartado una vez teniendo claro el anterior capítulo, proseguimos a la
elaboración del sistema de recolección almacenamiento y expulsión de fichas o tokens, aquí

ii
quedan definidos todos los mecanismos que se construyeron, y cuál es el funcionamiento de
éstos, sin perder de vista los objetivos básicos del sistema.
Capítulo IV. Se abordó el ensamble del sistema karel como la unión de todas las partes
anteriormente mencionadas; en ese apartado se ilustra cada pieza que conforma el sistema, y se
muestra un procedimiento lógico de cada subconjunto. Es importante hacer notar que todos los
ensambles siguen un patrón lógico que debe respetarse, pues si esto no sucede no cabe la menor
duda que las piezas de los diferentes subconjuntos se pueden dañar.
Capítulo V. En éste básicamente se presenta una parte realmente muy importante que es la
manufactura del sistema karel. Quedan definidas todas las herramientas necesarias para cada
pieza, así como también las velocidades de corte recomendadas en las máquinas para elaborarlos.
Pueden existir otros procesos de manufactura para aplicar a este sistema, aquí se recomiendan
los que se pusieron a prueba para la elaboración del sistema karel. Por otra parte se hace mención
de las diferentes herramientas de corte para las diferentes geometrías que surgieron durante el
diseño.
Es importante decir que si no se sigue lo recomendado en este capítulo pueda que las piezas del
sistema no cumplan los requerimientos necesarios para desempeñar las funciones para lo cual fue
diseñado.
Además se menciona un presupuesto aproximado de la elaboración del sistema, haciendo notar
que con el correr del tiempo puede quedar un tanto obsoleto.
Capítulo VI. En este apartado se hace mención que para obtener un sistema completo se
recurrieron a otras disciplinas que fueron necesarias para completar todo un esquema del sistema
y pudiera llegar a cumplir todas las funciones debidas.
Capítulo VII. Aquí se presenta la esencia de esta tesis, las conclusiones y recomendaciones, que
da la pauta de qué se logró en la elaboración del sistema, pues uno de los retos más significativos
que se tuvieron fue el trabajo grupal con otras disciplinas y la comunicación entre estas.
Glosario. Se pretende en esta parte que se puedan comprender muchos de los términos utilizados
en la manufactura de las partes que incluyen el prototipo
Referencias. Información técnica detallada por los fabricantes sobre los motores utilizados en los
sistemas de tracción, recolección y expulsión.

iii
Bibliografía. Referencias de libros utilizadas en la manufactura de todas las partes que componen
el prototipo; en la elaboración de planos de construcción, y en la forma correcta de maquinar con
las diversas herramientas.
Anexo A-1. En este anexo se presenta la codificación otorgada a cada pieza, la cual esta
desarrollada a partir del sistema en el que se ubicará, el sub – conjunto al cual pertenece, y el
número de piezas que se realizaran de esta misma, para este prototipo en particular. Cabe
mencionar que si se quiere producir a una mayor escala, los números de codificación se pueden
expandir agregando un número correlativo.
Anexo A-2. Los planos de construcción del prototipo son la parte más importante para la
fabricación de éste; en ellos se contemplan detalles de su elaboración, cantidad de piezas por cada
subconjunto, medidas, tipos de maquinados y la vista final de cómo quedará terminada y
ensamblada la pieza en el sistema que le compete.


INDICE
RESUMEN EJECUTIVO……………………………………………………………………………………...i
INDICE DE FIGURAS ......................................................................................................................... ix
INDICE DE TABLAS ........................................................................................................................... xi
SIGLAS ............................................................................................................................................. xiii
PRÓLOGO ......................................................................................................................................... xv
CAPITULO 1. INTRODUCCIÓN ......................................................................................................... 1
1.1 ANTECEDENTES ......................................................................................................................... 1
1.2 IMPORTANCIA Y JUSTIFICACIÓN DEL PROYECTO ................................................................ 2
1.3 OBJETIVOS .................................................................................................................................. 2
1.3.1 OBJETIVOS GENERALES ................................................................................................ 2
1.3.2 OBJETIVOS ESPECÍFICOS .............................................................................................. 3
1.4 DESCRIPCIÓN GENERAL DEL MOVIMIENTO DEL ROBOT ..................................................... 3
CAPITULO 2. DISEÑO DEL SISTEMA DE GIRO, AVANCE Y CHASIS .......................................... 7
2.1 INTRODUCCIÓN .......................................................................................................................... 7
2.2 SISTEMA DE GIRO Y AVANCE ................................................................................................... 7
2.2.1 DESCRIPCIÓN DEL SISTEMA DE GIRO Y AVANCE ...................................................... 8
2.3 CHASIS DEL MOTOR ................................................................................................................ 12
2.3.1 DESCRIPCIÓN DEL CHASIS DEL MOTOR.................................................................... 13
CAPITULO 3. DISEÑO DEL SISTEMA DE RECOLECCIÓN, ALMACENAMIENTO Y EXPULSIÓN DE FICHAS ....................................................................................................................................... 15
3.1 INTRODUCCIÓN ........................................................................................................................ 15
3.2 SISTEMA DE RECOLECCIÓN ................................................................................................... 15
3.2.1 DESCRIPCIÓN DEL SISTEMA DE RECOLECCIÓN ...................................................... 15
3.3 SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN .................................................................. 18
3.3.1 DESCRIPCIÓN DEL SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN DE FICHAS. 18
3.4 COMPONENTES DEL SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN ............................. 18
CAPITULO 4. DISEÑO FINAL DEL ROBOT ................................................................................... 23

4.1 INTRODUCCIÓN ......................................................................................................................... 23
4.2 PRESENTACIÓN DEL DISEÑO DEL ROBOT COMO LA UNION DE TODOS LOS SISTEMAS DISEÑADOS .............................................................................................................................. 23
CAPITULO 5. PRESUPUESTO Y MANUFACTURA DE COMPONENTES DEL SISTEMA KAREL ................................................................................................................................................... 39
5.1PRESUPUESTO DE COMPONENTES ....................................................................................... 39
5.2 PROCESO DE CONSTRUCCIÓN DEL CHASIS DEL ROBOT .................................................. 41
5.2.1 CHASIS DEL ROBOT ....................................................................................................... 41
5.3 PROCESO DE CONSTRUCCIÓN DEL SISTEMA DE RECOLECCIÓN DE FICHAS ............... 42
5.3.1 SOPORTE MOTOR DE RECOLECCIÓN ........................................................................ 42
5.3.2 RODETE DE RECOLECCIÓN ......................................................................................... 44
5.3.3 TOBOGÁN DE RECOLECCIÓN ...................................................................................... 45
5.3.4 SOPORTE DE TOBOGÁN DE RECOLECCIÓN .............................................................. 46
5.4 PROCESO DE CONSTRUCCIÓN DEL SISTEMA DE GIRO Y AVANCE ................................. 47
5.4.1 SOPORTES MOTOR DE GIRO Y AVANCE .................................................................... 47
5.4.2 RUEDA DE TRACCIÓN ................................................................................................... 49
5.4.3 EJE DE RODO ................................................................................................................. 50
5.4.4 BUJE DE EJE ................................................................................................................... 52
5.4.5 SOPORTE DE RODO ...................................................................................................... 53
5.4.6 PIN DE RUEDA ................................................................................................................ 54
5.4.7 RUEDA DE TRACCIÓN (rodo de precisión) .................................................................... 55
5.5 PROCESO DE CONSTRUCCIÓN DEL SISTEMA DE EXPULSIÓN Y ALMACENAMIENTO DE FICHAS ...................................................................................................................................... 56
5.5.1 SOPORTE MOTOR DE EXPULSIÓN .............................................................................. 56
5.5.2 ESPACIADOR SISTEMA-CHASIS ................................................................................... 58
5.5.3 SOPORTE SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN ..................................... 59
5.5.4 CILINDRO DE ALMACENAMIENTO ................................................................................ 60
5.5.5 EJE MOTOR DE EXPULSIÓN ......................................................................................... 61
5.5.6 CILINDRO SOPORTE DISCO FIJO ................................................................................. 62
5.5.7 DISCO MÓVIL DE EXPULSIÓN ...................................................................................... 63
5.5.8 DISCO FIJO DE EXPULSIÓN .......................................................................................... 65
5.6 PUESTA EN MARCHA DEL ROBOT ......................................................................................... 66
CAPÍTULO 6. PARTICIPACIÓN MULTIDISCIPLINARIA EN EL SISTEMA KAREL ..................... 67
CAPITULO 7. CONCLUSIONES Y RECOMENDACIONES ............................................................ 69
7.1 CONCLUSIONES........................................................................................................................ 69
7.2 RECOMENDACIONES ............................................................................................................... 71
GLOSARIO ....................................................................................................................................... 73
REFERENCIAS ................................................................................................................................. 75
BIBLIOGRAFÍA ................................................................................................................................ 76
ANEXO A CODIFICACIÓN DE PIEZAS DE SISTEMA KAREL
ANEXO B PLANOS DE CONSTRUCCIÓN DE SISTEMA KAREL



ix
INDICE DE FIGURAS
Figura 1.3.1. Elementos básicos del robot .......................................................................................... 4
Figura 1.3.2. Movimiento de avance ................................................................................................... 4
Figura 1.3.3. Movimiento de giro ......................................................................................................... 5
Figura 1.3.4. Elementos de recolección .............................................................................................. 5
Figura 2.2.5. Sistema de avance y giro............................................................................................... 7
Figura 2.2.6. Partes del sistema de giro y avance .............................................................................. 8
Figura 2.2.7. Motor de tracción ........................................................................................................... 9
Figura 2.2.8. Detalles de rueda de tracción ........................................................................................ 9
Figura 2.2.9. O´ring del sistema de tracción ..................................................................................... 10
Figura 2.2.10. Rueda de tracción ...................................................................................................... 10
Figura 2.2.11. Soporte de tracción .................................................................................................... 11
Figura 2.2.12. Estrella de tracción .................................................................................................... 11
Figura 2.2.13. Rodo y sus partes ...................................................................................................... 12
Figura 2.4.14. Chasis ........................................................................................................................ 13
Figura 3.2.15. Sistema de recolección .............................................................................................. 15
Figura 3.2.16. Rodete de recolección ............................................................................................... 16
Figura 3.2.17. Soporte de recolección .............................................................................................. 16
Figura 3.2.18. Motor de recolección .................................................................................................. 17
Figura 3.2.19. Tobogán ..................................................................................................................... 17
Figura 3.2.20. Soporte de tobogán ................................................................................................... 17
Figura 3.4.21. Sistema de expulsión ................................................................................................. 18
Figura 3.4.22. Motor de expulsión ..................................................................................................... 19
Figura 3.4.23. Eje de expulsión ......................................................................................................... 20
Figura 3.4.25. Cilindro de almacenamiento ...................................................................................... 21
Figura 3.4.26. Disco fijo y soporte ..................................................................................................... 21
Figura 3.4.27. Aletas del sistema de expulsión ................................................................................ 21
x
Figura 3.4.28. Espaciadores del sistema de expulsión ..................................................................... 22
Figura 3.4.29. Soporte de motor de expulsión .................................................................................. 22
Figura 4.2.30. Rodo ........................................................................................................................... 23
Figura 4.2.31. Indicación ensamble de rodo ..................................................................................... 24
Figura 4.2.32. Indicación de ensamble rodo-chasis .......................................................................... 24
Figura 4.2.33. Ensamble rodo-chasis ................................................................................................ 25
Figura 4.2.34. Tracción ...................................................................................................................... 25
Figura 4.2.35. Indicación ensamble de tracción ................................................................................ 26
Figura 4.2.36. Indicación ensamble de tracción-chasis .................................................................... 27
Figura 4.2.37. Ensamble tracción-chasis .......................................................................................... 28
Figura 4.2.38. Recolección ................................................................................................................ 28
Figura 4.2.39. Indicación ensamble de recolección-rodete ............................................................... 28
Figura 4.2.40. Ensamble de recolección-rodete ............................................................................... 29
Figura 4.2.41.Indicación ensamble de recolección-tobogán ............................................................. 30
Figura 4.2.42. Ensamble de recolección ........................................................................................... 31
Figura 4.2.43. Expulsión .................................................................................................................... 31
Figura 4.2.44. Indicación ensamble expulsión .................................................................................. 32
Figura 4.2.45. Indicación ensamble motor expulsión-chasis ............................................................ 33
Figura 4.2.46. Ensamble expulsión-chasis ........................................................................................ 34
Figura 4.2.47. Ensamble expulsión ................................................................................................... 34
Figura 4.2.48. Soporte de circuitos ................................................................................................... 34
Figura 4.2.49. Ensamble de soporte de circuitos .............................................................................. 35
Figura 4.2.50. Ensamble de soporte de circuitos-chasis .................................................................. 35
Figura 4.2.51. Ensamble karel .......................................................................................................... 36
Figura 4.2.52. Ensamble karel-vista superior .................................................................................... 36
Figura 4.2.53. Ensamble karel-vista lateral ....................................................................................... 37
Figura 4.2.54. Ensamble karel-vista posterior ................................................................................... 37
Figura 4.2.55. Ensamble karel-vista frontal ....................................................................................... 37


xi
INDICE DE TABLAS
Tabla 5.1.1 presupuesto materiales construcción estudiantes. ........................................................ 39
Tabla 5.1.2 presupuesto construcción en taller calificado. ............................................................... 40
Tabla 5.2.1 material, herramientas, instrumentos y equipo necesario para elaborar el chasis del robot. .................................................................................................................................................. 41
Tabla 5.3.1 material, herramientas, instrumentos y equipo necesario para elaborar soporte motor de recolección. ........................................................................................................................... 43
Tabla 5.3.2 material, herramientas, instrumentos y equipo necesario para elaborar rodete de recolección. ....................................................................................................................................... 44
Tabla 5.3.3 material, herramientas, instrumentos y equipo necesario para elaborar tobogán de recolección. ....................................................................................................................................... 45
Tabla 5.3.4 material, herramientas, instrumentos y equipo necesario para elaborar soporte tobogán de recolección. .................................................................................................................................. 46
Tabla 5.4.1 material, herramientas, instrumentos y equipo necesario para elaborar soporte motor de giro y avance. ............................................................................................................................... 48
Tabla 5.4.2 material, herramientas, instrumentos y equipo necesario para elaborar rueda de tracción. ............................................................................................................................................. 49
Tabla 5.4.3 material, herramientas, instrumentos y equipo necesario para elaborar eje de rodo. ... 51
Tabla 5.4.4 material, herramientas, instrumentos y equipo necesario para elaborar buje de eje. ... 52
Tabla 5.4.5 material, herramientas, instrumentos y equipo necesario para elaborar soporte de rodo. ................................................................................................................................................... 53
Tabla 5.4.6 material, herramientas, instrumentos y equipo necesario para elaborar pin de rueda. . 54
Tabla 5.4.7 material, herramientas, instrumentos y equipo necesario para elaborar rueda de tracción (rodo de precisión). ...................................................................................................... 55
Tabla 5.5.1 material, herramientas, instrumentos y equipo necesario para elaborar soporte motor de expulsión. .............................................................................................................................. 56
Tabla 5.5.2 material, herramientas, instrumentos y equipo necesario para elaborar espaciador sistema de expulsión - chasis. ................................................................................................... 58
Tabla 5.5.3 material, herramientas, instrumentos y equipo necesario para elaborar soporte sistema almacenamiento y expulsión. ....................................................................................... 59
Tabla 5.5.4 material, herramientas, instrumentos y equipo necesario para elaborar cilindro de almacenamiento......................................................................................................................... 60


xii
Tabla 5.5.5 material, herramientas, instrumentos y equipo necesario para elaborar eje motor de expulsión. ................................................................................................................................... 61
Tabla 5.5.6 material, herramientas, instrumentos y equipo necesario para elaborar cilindro soporte disco fijo. .................................................................................................................................... 63
Tabla 5.5.7 material, herramientas, instrumentos y equipo necesario para elaborar disco móvil de expulsión. ................................................................................................................................... 64
Tabla 5.5.8 material, herramientas, instrumentos y equipo necesario para elaborar disco fijo de expulsión. ................................................................................................................................... 65

xiii
SIGLAS
r.p.m Revoluciones por minuto



xv
PRÓLOGO
Al elaborar este documento se tiene como objeto dejar ciertas bases cimentadas y claras para la
elaboración del sistema karel
El sistema karel tiene como objetivo en sí la ayuda a estudiantes de computación para el
aprendizaje de éstos en el ámbito de la programación estructurada, y que dicha área informática no
sea tediosa y observen la importancia que la programación tiene.
Cabe mencionar que esta tesis es solo una guía; lo que quiere decir es que pueden surgir millares
de ideas para elaborar sistemas karel que cumplan con los requerimientos; el diseño precisamente
es eso miles de formas de elaborar “sistemas” dependiendo de la creatividad de cada individuo y
que reúna ciertos requerimientos.
El sistema karel es la sinergia del resultado multidisciplinario mecánico, eléctrico e informático;
juntas las tres disciplinas generan el sistema. En los siguientes apartados se incluirá el diseño y
construcción desde el punto de vista mecánico.
La parte mecánica la constituye en sí el diseño mismo y requerimientos de movimiento; la parte
eléctrica incurre en el diseño de circuitos, para que mediante la interfaz de un ordenador (parte
informática) se le ordene al sistema ejecutar las funciones para lo cual ha sido diseñado, la parte
informática básicamente es la encargada del diseño de un software que se utilice como dicha
interfaz.
A lo largo del desarrollo de este documento se pretende conducir de la mano al lector con un
especial diseño del sistema karel hasta su construcción (se recalca que el diseño puede variar, no
es único, más sin embargo los objetivo deben de cumplirse).
Los primeros capítulos abordados en dicho documento comienzan por plantear claramente cuáles
son las funciones del sistema karel, pues esa es precisamente la piedra angular para partir a un
diseño en particular que cumpla con dichos requisitos; entre las funciones que el sistema karel
debe poseer podemos mencionar: el sistema solo podrá girar a la izquierda, es decir que cuando el
sistema requiera orientarse a la derecha deberá hacerlo girando siempre a la izquierda hasta lograr
dicha orientación (derecha), lo dicho anteriormente se aplica a un entorno de trabajo donde estará
el sistema, ya sea este el suelo o un mundo diseñado en particular; otra función importante es que
karel solo puede avanzar hacia adelante, jamás puede retroceder, otra función requerida es que el
sistema debe recolectar elementos llamados “fichas o tokens”, y como última función el sistema
debe de almacenar dichas “fichas” y posteriormente expulsarlas según sea lo requerido en la
ejecución de las funciones.


xvi
Los capítulos posteriores a la definición del sistema, desglosan cada subconjunto de los que está
compuesto, desde la forma mecánica en que éste avanza hasta como recoge, almacena y deposita
las “fichas”.
El diseño que se le otorgo al sistema karel no es nada complejo, trató de que tal diseño fuera
simple desde su geometría hasta sus mecanismos; debido a que en muchos lugares de nuestro
país poseen maquinaria que no pueden manufacturar geometrías relativamente “complejas”.
Uno de los retos más desafiantes del sistema karel fue el tamaño, pues trato de hacerse
relativamente compacto; todo lo que involucra al sistema karel respecto al diseño se ha dejado
plasmado en una serie de planos de fácil comprensión para la elaboración de éste.

1
CAPITULO 1. INTRODUCCIÓN
1.1 ANTECEDENTES
Breve reseña histórica
Karel el Robot es una aplicación sencilla de software que consta de un simulador de robot
integrado para probar instrucciones de programación en lenguaje Karel++. Karel el Robot es
comúnmente utilizado como una introducción simple a la programación para estudiantes de
cómputo, pues aunque su lenguaje no es como el utilizado en realidad para programar, provee
bases fuertes sobre lo que significa diseñar un programa de instrucciones aplicable a situaciones
variables.
En 1981, el profesor norteamericano Robert Pattis, se planteó el problema sobre la manera más
idónea de poder enseñar a programar a sus estudiantes, tratando de encontrar una metodología
que organizara su manera de pensar y que enfocara las soluciones de sus estudiantes y que estos
a su vez, pudieran interpretarlas en computador. [Karel esencial]
Robert Pattis escribió en 1985 una primera versión del libro titulado “Karel the Robot” o “El Robot
Karel”
El robot Karel tiene su propio lenguaje, formado por instrucciones naturales tales como moverse y
cambiar de dirección, junto con otras instrucciones que se encuentran normalmente en un lenguaje
de programación estructurado, como: instrucciones primitivas, instrucciones de estructuración para
bloques, instrucciones condicionales, instrucciones de repetición y mecanismo para definir
procedimientos. Dicho lenguaje para manipular el robot es llamado lenguaje de Karel.
El léxico que se utiliza es imperativo y reducido ya que a partir de cinco palabras tales como:
avanzar, izquierda, recoger, colocar y apagar los estudiantes de programación son capaces de
elaborar un pseudo código complejo que permite desarrollar más habilidades en el robot. El mundo
de Karel consta solamente de cinco elementos que son:
Calles (segmentos horizontales)
Avenidas (segmentos verticales)
Obstáculos, que son impenetrables entre dos esquinas
Monedas
Compartimiento para las monedas

2
Para poder interactuar con Karel, es necesaria la definición de condiciones iniciales para crear su
medio ambiente. Estas condiciones son:
Especificación de la posición inicial de Karel. Esquina y dirección hacia la cual está viendo
Localización y tamaño de cada sección de pared en su mundo
Localización de cada moneda en su mundo. Esto incluye el número de moneda en el
compartimiento de Karel.
En ciclos anteriores la UCA ha trabajado con el robot karel, cumpliendo con los requisitos de
movimiento que el robot requiere, pero se ha tenido inconvenientes en la optimización de dicho
robot, tales como el consumo excesivo de energía, excesiva vibración. A nivel mecánico karel ha
presentado defectos del tipo, vibración, calentamiento.
1.2 IMPORTANCIA Y JUSTIFICACIÓN DEL PROYECTO
La elaboración del robot karel principalmente va destinado a la enseñanza de los estudiantes de
computación; el robot karel es una interfaz de un mudo virtual a un mundo físico, que devela la
función de comandos de un lenguaje de programación a un entorno real; por otra parte va
orientado a los estudiantes de mecánica, que no posean conocimiento o experiencia acerca de la
manufactura de piezas, uniones, etc. que requiere la construcción de un mecanismo como éste.
Además con dicho diseño y construcción se ayudará al estudiante a aplicar lo que se aprende en
las diferentes materias de diseño en ingeniería mecánica.
1.3 OBJETIVOS
1.3.1 OBJETIVOS GENERALES
Diseñar y construir los componentes mecánicos del robot karel, tales como: chasis,
sistema de avance, sistema de giro y sistema de recolección.
Crear una guía de construcción del robot Karel, con el objetivo que este pueda ser
reproducido para él interesado en el tema.

3
1.3.2 OBJETIVOS ESPECÍFICOS
Descripción de elaboración y funcionamiento de cada parte que compone al robot.
Elaboración de planos constructivos para cada componente del robot karel.
Establecer una metodología definida para la construcción del robot.
Diseñar un sistema de movimiento que respete las ordenes del programa karel, tales
como: giro a la izquierda, avance hacia adelante y recolección de fichas.
1.4 DESCRIPCIÓN GENERAL DEL MOVIMIENTO DEL ROBOT
El objetivo del robot karel es básicamente desplazarse a través de su mundo, recorriéndolo con el
afán de recolectar fichas posicionadas en dicho mundo y guardarlas en un compartimento que
posee el robot.
Karel-el robot se caracteriza por presentar las siguientes secuencias de movimiento:
Avanzar. El robot avanzará una calle (dentro de su mundo) en la dirección hacia donde
está orientado, siempre y cuando no exista una pared enfrente.
Girar-izquierda. Le indica al robot, que en la misma posición en que está, ejecute un
giro hacia la izquierda.
Recoger-ficha. El robot tomará una de las fichas disponibles en la posición donde se
encuentre; deberá de haber al menos uno.
Soltar-ficha. El robot dejará una de las fichas que trae en su depósito; deberá de traer
al menos uno.

4
La ejecución de cada movimiento del robot será posible mediante la implementación de dos
motores de DC, colocados simétricamente.
Figura 1.3.1. Elementos básicos del robot
Para el movimiento de avance, ambos motores girarán en un mismo sentido provocando así un
movimiento rectilíneo hacia donde este orientado el robot.
Figura 1.3.2. Movimiento de avance

5
Para el giro a la izquierda ambos motores girarán en sentido contrario, logrando así un giro sobre
su eje de simetría.
Figura 1.3.3. Movimiento de giro
Para la recolección de fichas se dispondrá también de un motor DC, el cual mediante la ayuda de
un rodete provisto de imanes recolectara las fichas. Para soltar las fichas se usará un motor DC
también provisto de un mecanismo que desprenderá las fichas del rodete para que éstas caigan en
el compartimento del robot.
Figura 1.3.4. Elementos de recolección


7
CAPITULO 2. DISEÑO DEL SISTEMA DE GIRO, AVANCE Y CHASIS
2.1 INTRODUCCIÓN En este capítulo se abordarán principalmente la descripción del sistema de giro, avance y chasis
del robot así como el diseño de estos componentes; se debe tomar en cuenta que el diseño del
chasis presenta una forma simplificada (forma geométrica) pero a la vez funcional. El sistema de
avance del robot presenta dos componentes básicos que son motores del tipo DC que son los
principales en generar la tracción en el robot (avance), y además son los responsables de provocar
el giro del robot al lado izquierdo (único sentido de giro).
2.2 SISTEMA DE GIRO Y AVANCE El sistema de giro cumple la función de hacer girar el dispositivo con respecto al eje de simetría
del robot, con el objeto de tener un giro preciso; el sistema fue basado en la aplicación de soportes
robustos de aluminio que van unidos al chasis para minimizar la vibración que puede generarse a
la hora de echar andar los motores, por otro lado tenemos el sistema de avance que básicamente
involucra al mismo sistema de giro variando únicamente el sentido de giro de los motores DC, es
decir, que para el avance ambos motores giran en un mismo sentido, y para el giro los motores
giran en sentido contrario uno con respecto del otro.
La proporción del sistema de giro se presenta de la siguiente manera (vista frontal):
Figura 2.2.5. Sistema de avance y giro
Especificaciones (Futaba S3004): Velocidad: 0.23 seg/60° a 4.8V 0.19 seg/60° a 6.0V Torque: 44.3 oz-in (3.2kg-cm) a 4.8V 56.8 oz-in (4.1kg-cm) a 6.0V Engranes de nylon Longitud: 1.6" (41mm) Ancho: 0.8"(20mm)Alto: 1.4" (36mm)Peso: 1.3 onzas (37.2 gramos)
8
2.2.1 DESCRIPCIÓN DEL SISTEMA DE GIRO Y AVANCE
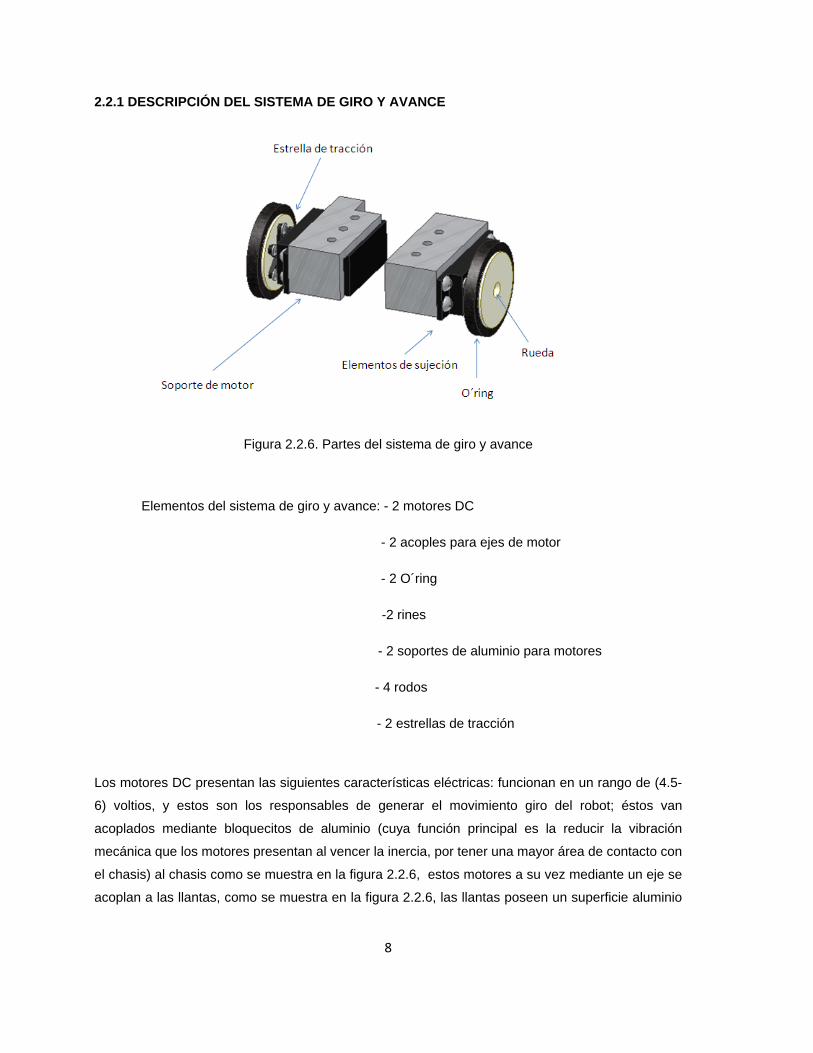
Figura 2.2.6. Partes del sistema de giro y avance
Elementos del sistema de giro y avance: - 2 motores DC
- 2 acoples para ejes de motor
- 2 O´ring
-2 rines
- 2 soportes de aluminio para motores
- 4 rodos
- 2 estrellas de tracción
Los motores DC presentan las siguientes características eléctricas: funcionan en un rango de (4.5-
6) voltios, y estos son los responsables de generar el movimiento giro del robot; éstos van
acoplados mediante bloquecitos de aluminio (cuya función principal es la reducir la vibración
mecánica que los motores presentan al vencer la inercia, por tener una mayor área de contacto con
el chasis) al chasis como se muestra en la figura 2.2.6, estos motores a su vez mediante un eje se
acoplan a las llantas, como se muestra en la figura 2.2.6, las llantas poseen un superficie aluminio

9
que va recubierta con empaques O-ring, cuya finalidad es la de poseer mayor tracción entre la
superficie de contacto y dichas ruedas.
Motores:
Figura 2.2.7. Motor de tracción
Estos son los encargados de proporcionar el movimiento del robot así como el giro, y son
dispositivos comerciales que se pueden encontrar en almacenes.
Acoples para eje de motores:
Figura 2.2.8. Detalles de rueda de tracción
Estas perforaciones en los rines servirán para acoplar el eje del motor y además para sujetar el eje
del motor con la rueda y que deslicen respecto al eje del motor

10
O´rings:
Figura 2.2.9. O´ring del sistema de tracción
Estos elementos elaborados de un polímero tienen la función primordial de evitar que las llantas
deslicen respecto al piso, (aumenta el coeficiente de fricción) y brindan una mayor tracción al robot.
Los o´ring son comerciales y se pueden encontrar en ferreterías.
Rines:
Figura 2.2.10. Rueda de tracción
Dichos elementos tienen como función servir de apoyo a los o´ring y básicamente la unión de los
rines con los o´ring constituye una “llanta” que es el elemento principal en la tracción y giro del
robot.

11
Soportes de aluminio:
Figura 2.2.11. Soporte de tracción
Los soportes de motor cumplen básicamente esa función “contener” a los motores, por otro lado
tiene la función de disipar la vibración de dichos motores debido a que el área de contacto entre
éstos y el chasis es tal que la vibración se propaga por dicha área.
Estrella de tracción
Figura 2.2.12. Estrella de tracción
Este dispositivo tiene como función el acople de la rueda de tracción con el motor de tracción, por
medio de elementos de sujeción (tornillos).
Rodos:
Tienen la finalidad de darle estabilidad a toda la estructura del robot cuando éste pasa del estado
de reposo al movimiento. Estos rodos no presentan un movimiento aleatorio (como los rodos
“locos”) sino que sigue el movimiento es ajustado al giro del robot y también al avance. Los rodos
están compuestos por los siguientes elementos:
12
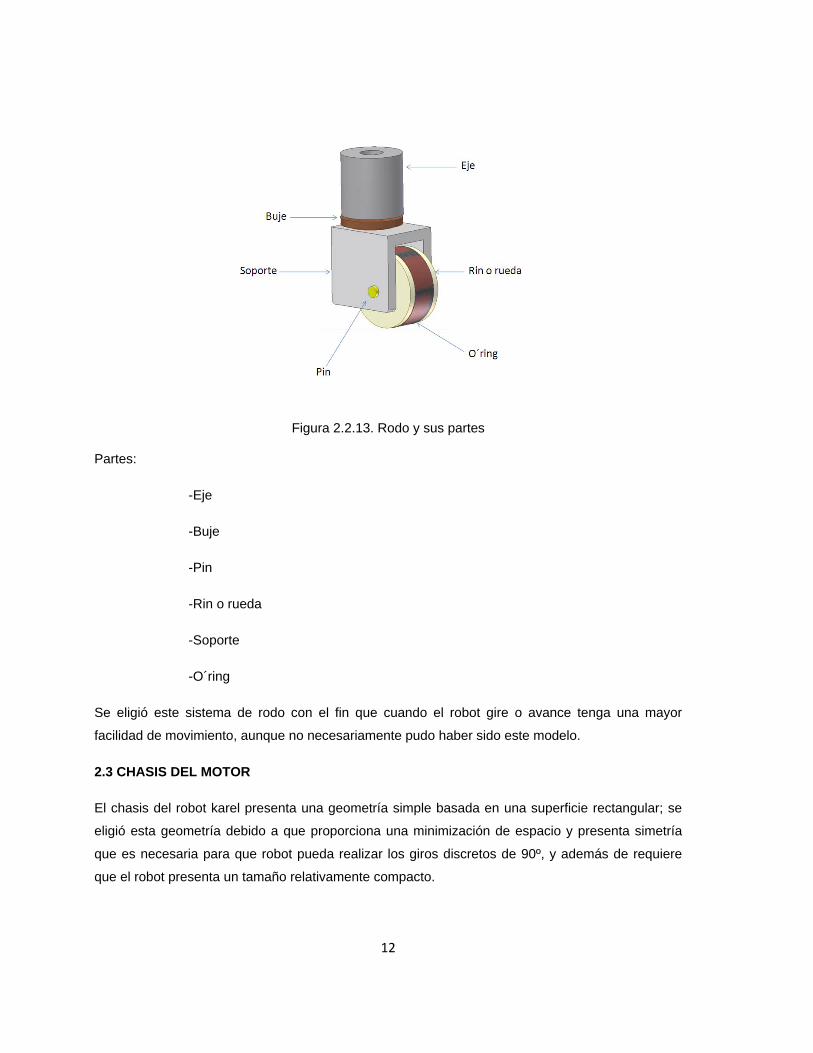
Figura 2.2.13. Rodo y sus partes
Partes:
-Eje
-Buje
-Pin
-Rin o rueda
-Soporte
-O´ring
Se eligió este sistema de rodo con el fin que cuando el robot gire o avance tenga una mayor
facilidad de movimiento, aunque no necesariamente pudo haber sido este modelo.
2.3 CHASIS DEL MOTOR
El chasis del robot karel presenta una geometría simple basada en una superficie rectangular; se
eligió esta geometría debido a que proporciona una minimización de espacio y presenta simetría
que es necesaria para que robot pueda realizar los giros discretos de 90º, y además de requiere
que el robot presenta un tamaño relativamente compacto.

13
2.3.1 DESCRIPCIÓN DELCHASIS DEL MOTOR
El chasis presenta un dimensionamiento 130mmx85mm cortado de lámina de aluminio, en la figura
2.2.14 se presenta el chasis con la distribución de espacios
Figura 2.4.14. Chasis


15
CAPITULO 3. DISEÑO DEL SISTEMA DE RECOLECCIÓN, ALMACENAMIENTO Y EXPULSIÓN DE FICHAS
3.1 INTRODUCCIÓN En este capítulo se abordará la selección del diseño de recolección, almacenamiento y expulsión
para las fichas del robot karel; cada uno de estos sistemas presenta un diseño muy particular
inspirados de una manera sencilla pero funcionales para desempeñar sus respectivos objetivos. En
los siguientes apartados se desarrollan de manera independiente cada uno de los sistemas.
3.2 SISTEMA DE RECOLECCIÓN El sistema de recolección del robot karel como su nombre lo indica, debe de presentar la función
de recolección; y esto se logró mediante el diseño de une especie de tobogán por el cual un rodete
instalado en el robot que porta un imán natural recolecta la ficha del suelo,(éste es movido
mediante la acción de un motor DC) y ésta es desprendida mediante el tobogán y es deslizada
hacia el sistema de almacenamiento, para lograr dicho deslizamiento a través del tobogán
tomamos a la gravedad para realizar dicho trabajo inclinándolo 20º; pues ya que para estas
inclinaciones la componente de la gravedad realiza un trabajo efectivo; se pudo escoger cualquier
otro angulo entre 0º<angulo<90º, pero por el espacio dado en el chasis quedo muy bien el angulo
mencionado; por otra parte para evitar pérdidas de fricción en el tobogán se debió pulir dicha
superficie.
3.2.1 DESCRIPCIÓN DEL SISTEMA DE RECOLECCIÓN
Figura 3.2.15. Sistema de recolección

16
Elementos del sistema de recolección:
-Rodete
-Soporte de motor
-Motor
-Tobogán
-Soporte para tobogán
Rodete:
Figura 3.2.16. Rodete de recolección
Elemento encargado para recolectar ficha
Soporte de motor:
Figura 3.2.17. Soporte de recolección
Elemento encargado de soportar el motor de recolección y proporcionarle firmeza

17
Motor:
(Motor 5.9V, DC Mabushi)
Figura 3.2.18. Motor de recolección
Dispositivo encargado de proporcionar movimiento rotativo al rodete
Tobogán:
Figura 3.2.19. Tobogán
Elemento encargado de transportar la ficha recolectada hacia el depósito de almacenamiento
Soporte para tobogán:
Figura 3.2.20. Soporte de tobogán
Elementos encargados de la sujeción del tobogán al chasis.

18
3.3 SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN
Se describirán el sistema de recolección, almacenamiento y expulsión de fichas, así como también
el diseño de las mismas. Los diferentes sistemas básicamente se complementan y funcionan como
uno solo; esto debido a que es la ruta que llevaran las fichas en el interior del robot. Para realizar
dichas funciones se complementan con dos elementos muy importantes como lo son dos motores
DC de 5.9V, que son los encargados de recoger y botar las fichas.
3.3.1 DESCRIPCIÓN DEL SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN DE FICHAS
El sistema cumple básicamente con la función de almacenar y expulsar las fichas en el momento
que se le ordene hacerlo. Está compuesto principalmente de un motor con su soporte; acoplado a
un eje que está unido a un disco móvil el cual gira a las mismas revoluciones por minuto que el
motor, un cilindro de almacenamiento el cual sirve como acople para dos soportes que sirven para
unir el sistema al chasis y un disco fijo unido a un cilindro para evitar que las fichas salgan del
robot.
3.4 COMPONENTES DEL SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN
Figura 3.4.21. Sistema de expulsión

19
Elementos del sistema de almacenamiento y expulsión:
1. un motor DC
2. un soporte de motor
3. un eje adaptador de motor – disco
4. un cilindro de almacenamiento
5. Dos soportes del sistema
6. un disco móvil
7. un disco fijo
8. Un cilindro soporte del sistema y del disco fijo.
9. Dos espaciadores del sistema - chasis
El motor DC del sistema presenta las siguientes características eléctricas: funciona con 5.9 voltios
y es el encargado de mover el disco móvil y poder expulsar las fichas. Este posee un soporte el
cual le da fijeza al chasis, y es lo suficientemente ancho para soportarlo de una manera adecuada
y evitar vibraciones en el movimiento. El motor posee un eje extra el cual esta acoplado a su eje
natural; este para extender su potencia hasta el disco móvil y poder generar el movimiento de
agarrar la ficha del cilindro de almacenamiento y expulsarla al exterior del robot.
(Motor 5.9V, DC Mabushi)
Figura 3.4.22. Motor de expulsión
El motor se encarga de transmitir su potencia para poder sacar las fichas almacenadas del robot en
el momento que este se le exija por medio de una señal eléctrica.
20
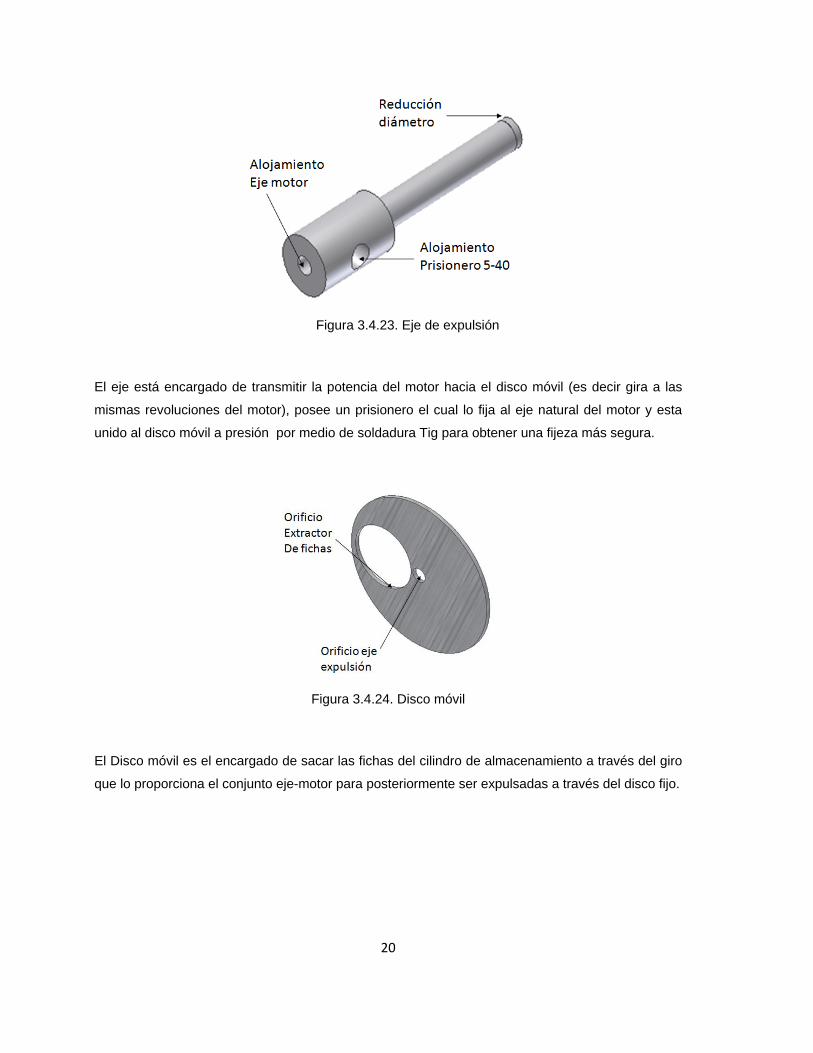
Figura 3.4.23. Eje de expulsión
El eje está encargado de transmitir la potencia del motor hacia el disco móvil (es decir gira a las
mismas revoluciones del motor), posee un prisionero el cual lo fija al eje natural del motor y esta
unido al disco móvil a presión por medio de soldadura Tig para obtener una fijeza más segura.
Figura 3.4.24. Disco móvil
El Disco móvil es el encargado de sacar las fichas del cilindro de almacenamiento a través del giro
que lo proporciona el conjunto eje-motor para posteriormente ser expulsadas a través del disco fijo.

21
Figura 3.4.25. Cilindro de almacenamiento
Cilindro de almacenamiento es de forma cónico; Encargado de almacenar las fichas para que el
robot las deseche en el momento que se le ordene este cilindro es abastecido a través del tobogán
del sistema de recolección de fichas.
Figura 3.4.26. Disco fijo y soporte
Disco fijo a un cilindro soporte; el cual básicamente sirve para determinar el punto exacto para poder expulsar las fichas fuera del robot.
Figura 3.4.27. Aletas del sistema de expulsión

22
Soportes de sistema de almacenamiento y expulsión, son los encargados de dar fijeza al todo el
conjunto ya que son la unión del sistema al chasis.
Figura 3.4.28. Espaciadores del sistema de expulsión
Espaciadores ubicados entre el sistema de almacenamiento y expulsión y el chasis, son lo
encargados de servir como separación y ajuste entre el chasis y el sistema para proporcionarle la
rigidez necesaria al sistema.
Figura 3.4.29. Soporte de motor de expulsión
Soporte del motor de expulsión, encargado de proporcionar fijeza y rigidez al motor de expulsión
para que este proporcione correctamente la potencia al eje del motor y por ende este al disco móvil
de expulsión. Principalmente este se encarga de darle una ubicación correcta al motor en el chasis.

23
CAPITULO 4. DISEÑO FINAL DEL ROBOT
4.1 INTRODUCCIÓN En este capítulo se presentaran los diferentes sistemas que conforman al robot karel, así como
también el ensamble del robot final, detallando la importancia de cada uno de los sistemas.
4.2 PRESENTACIÓN DEL DISEÑO DEL ROBOT COMO LA UNION DE TODOS LOS SISTEMAS DISEÑADOS Los sistemas que conforman al robot karel básicamente son cinco:
Sistema de rodo
Sistema de soporte para circuitos
Sistema de recolección
Sistema de avance y giro
Sistema de expulsión y chasis
La unión de todos esos sistemas forma la sinergia que da como resultado al robot karel. Veamos
cada uno de los sistemas:
Sistema rodo:
Figura 4.2.30. Rodo
24
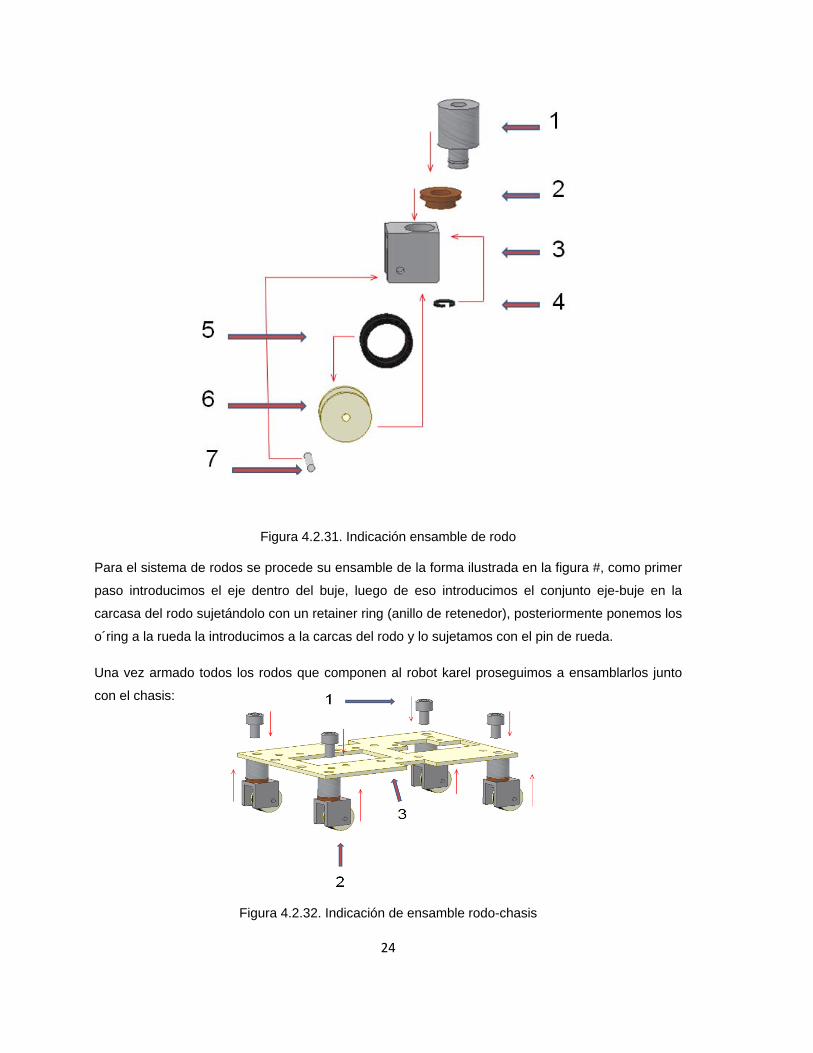
Figura 4.2.31. Indicación ensamble de rodo
Para el sistema de rodos se procede su ensamble de la forma ilustrada en la figura #, como primer
paso introducimos el eje dentro del buje, luego de eso introducimos el conjunto eje-buje en la
carcasa del rodo sujetándolo con un retainer ring (anillo de retenedor), posteriormente ponemos los
o´ring a la rueda la introducimos a la carcas del rodo y lo sujetamos con el pin de rueda.
Una vez armado todos los rodos que componen al robot karel proseguimos a ensamblarlos junto
con el chasis:
Figura 4.2.32. Indicación de ensamble rodo-chasis

25
Partes:
1. Perno allen 10-24
2. Rodo
3. Chasis
Por medio de un elemento de sujeción, para este caso un perno allen 10-24 sujetamos los rodos al
chasis tal como se muestra en la figura.
Figura 4.2.33. Ensamble rodo-chasis
Sistema de avance y giro:
Figura 4.2.34. Tracción

26
Figura 4.2.35. Indicación ensamble de tracción
Partes:
1. O´ring 2-323
2. O´ring 2-026
3. Rueda o rin
4. Estrella de tracción
5. Tornillos para estrella de tracción
6. Tornillo para sujeción de motor de tracción
7. Motor para tracción
8. Carcasa para motor de tracción

27
Para realizar este ensamble basta con ilustrar una parte de éste pues la otra parte es simétrica y
de igual analogía, como primeros pasos colocamos los o´ring 2-323 y 2-026 en la rueda, una vez
hecho esto colocamos la estrella de tracción a la rueda o rin y la unimos a ésta mediante tornillos
que viene con el kit del motor tal como se muestra en la figura #, luego de eso unimos la rueda al
motor mediante tornillo provisto al igual en el kit del motor de tracción, posteriormente unimos el
motor a la carcasa con pernos 8-32.
Luego de haber finalizado esta etapa continuamos a ensamblarlo al chasis de la siguiente manera:
Figura 4.2.36. Indicación ensamble de tracción-chasis
Partes:
1. Sistema de avance
2. Chasis
3. Perno allen 6-32

28
Al final del ensamble con el chasis debe de quedarnos de la siguiente manera:
Figura 4.2.37. Ensamble tracción-chasis
Sistema de recolección:
Figura 4.2.38. Recolección
Figura 4.2.39. Indicación ensamble de recolección-rodete

29
Partes:
1. Soporte de motor de recolección
2. Motor de recolección
3. Set screw
4. Rodete de recolección
5. Set screw
6. Magneto
Para ensamblar el subconjunto de recolección comenzamos primero colocando el motor de
recolección en el soporte, posteriormente lo sujetamos con la ayuda de un prisionero o set screw;
luego colocamos el rodete de recolección en el eje del motor y lo sujetamos nuevamente con un
prisionero quedando este ensamble de la forma:
Figura 4.2.40. Ensamble de recolección-rodete
Luego de haber ensamblado esta parte (rodete de recolección junto con motor) continuamos con
el ensamble de dicha pieza y el tobogán junto con el chasis:

30
Figura 4.2.41.Indicación ensamble de recolección-tobogán
Partes:
1. Rodete de recolección y motor
2. Perno allen 6-32
3. Perno allen 6-32
4. Tobogán
5. Chasis
Una vez que hemos ensamblado el rodete de recolección junto con el motor precedemos a
ensamblarlo al chasis junto con el tobogán, colocamos primero el conjunto de rodete recolección y
motor en el chasis mediante el uso de pernos allen, luego colocamos el tobogán al chasis y lo
sujetamos de igual manera con perno allen, teniendo como resultado del ensamble la siguiente
forma:

31
Figura 4.2.42. Ensamble de recolección
Sistema de expulsión y chasis:
Figura 4.2.43. Expulsión

32
Figura 4.2.44. Indicación ensamble expulsión
Partes:
1. Motor de expulsión
2. Soporte de motor
3. Set screw (motor-soporte)
4. Pernos allen 6-32
5. Chasis
6. Set screw (eje de motor-disco móvil)
7. Disco fijo
8. Soporte de disco fijo
9. Disco móvil

33
10. Cilindro almacenador de fichas
11. Aletas
12. Espaciadores (aletas-chasis)
13. Perno allen (para unión de aletas-chasis)
Para realizar el ensamble del sistema de expulsión se comienza por colocar el motor de expulsión
en el soporte de éste; luego de eso sujetamos el conjunto soporte-motor mediante un set screw;
utilizamos pernos allen para unir el sub-ensamble motor-soporte al chasis; una vez hecho esto
comenzamos a unir al disco móvil del sistema de expulsión el disco fijo y el soporte de éste;
posteriormente unimos las aletas y colocamos los espaciadores sobre éstas para luego unirlas al
chasis mediante pernos allen.
Figura 4.2.45. Indicación ensamble motor expulsión-chasis

34
Figura 4.2.46. Ensamble expulsión-chasis
Figura 4.2.47. Ensamble expulsión
Sistema de soporte para circuitos:
Figura 4.2.48. Soporte de circuitos

35
Figura 4.2.49. Ensamble de soporte de circuitos
Partes:
1. Espaciadores
2. Placa para alojar circuitos
3. Perno allen 6-32
Para ensamblar este sistema unimos los espaciadores a la placa de alojamiento de circuitos
mediante pernos allen y posteriormente este conjunto se acopla al chasis.
Figura 4.2.50. Ensamble de soporte de circuitos-chasis

36
El ensamble
Figura 4.2.51. Ensamble karel
Figura 4.2.52. Ensamble karel-vista superior

37
Figura 4.2.53. Ensamble karel-vista lateral
Figura 4.2.54. Ensamble karel-vista posterior
Figura 4.2.55. Ensamble karel-vista frontal


39
CAPITULO 5. PRESUPUESTO Y MANUFACTURA DE COMPONENTES DEL SISTEMA KAREL 5.1PRESUPUESTO DE COMPONENTES
Para la elaboración del prototipo se tienen dos opciones; las cuales dependerán de la capacidad
tanto manual como de la maquinaria necesaria para su realización. A continuación se detallan dos
tipos de presupuesto uno en el cual se pueden adquirir las mínimas cantidades de material a la
venta en el mercado salvadoreño para su elaboración y puede ser ejecutado por estudiantes o
cualquier persona interesada en la elaboración del mismo, esta opción requiere el 100% de
participación de quien ejecuta su elaboración; por lo tanto llevara más tiempo realizarlo si no se
tiene la experiencia necesaria en manufacturas de este tipo. La otra opción es concesionar la
elaboración del robot verificando y participando de su elaboración; para poder lograr un producto
final con mayor grado de precisión, un mejor acabado, un nivel de detalle mayor y sobre todo algo
muy importante que se aprendan nuevas metodologías de manufactura o mejorar las existentes. El
prototipo y la manufactura que se decidió tomar fue el de concesión de manufactura por las
ventajas que otorga tanto al producto final, como a la persona interesada en ejecutar dicho
prototipo.
Tabla 5.1.1 presupuesto materiales construcción estudiantes.

40
Tabla 5.1.2 presupuesto construcción en taller calificado.

41
5.2 PROCESO DE CONSTRUCCIÓN DEL CHASIS DEL ROBOT
Para elaborar el chasis del robot se deberá de tener un algo grado de precisión, en la marcación de
los puntos de perforación y corte. En caso contrario se podrían tener problemas al momento de
ensamblar los demás sub-conjuntos. A continuación se detalla los elementos necesarios y los
procesos claves para su elaboración.
5.2.1 CHASIS DEL ROBOT
Tabla 5.2.1 material, herramientas, instrumentos y equipo necesario para elaborar el chasis del
robot.
Procedimiento de elaboración:
− Tomar lámina de aluminio de 1 mm. de espesor y el plano de chasis.
Cantidad 1 Material Lamina de aluminio de 1 mm.Velocidad de maquinado 500 rpm.Velocidad de afinado 100 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufacturaDisco fino de corte Cinta métrica Cizalla Lima vernier de altura Pulidora Esmeril Vernier Fresadora Dobladora Dobladora Fresa (1/4 y 1/8 ) Broca #2 (0.2210") Broca #18 (0.170") Broca 1/16

42
− Cortar un rectángulo que tenga 13.5 cm de largo por 8.5 de ancho y posteriormente verificar
las dimensiones con cinta métrica y cortes con una escuadra.
− Colocar el rectángulo en una mesa de trazos en la cual con plano a escala en mano; se deben
trazar los cortes y los agujeros que se harán en el chasis a distancias y posiciones
determinadas.
− Marcar con un centro punto y se trazaran líneas guías (con lápiz o plumón).
− Montar la pieza en la fresadora para sacarle los cortes internos y los laterales a las
dimensiones determinadas en el plano.
− Colocar el chasis con los cortes en el taladro de banco para hacerle los agujeros estos se
verificaran en el plano que broca y diámetro son cada uno.
− Al finalizar todos los cortes y perforaciones; colocar la placa sobre el plano para verificar la
precisión y darle un acabado superficial al chasis y con una lima quitar los filos resultantes del
corte.
5.3 PROCESO DE CONSTRUCCIÓN DEL SISTEMA DE RECOLECCIÓN DE FICHAS
En la construcción del sistema de recolección de fichas, se deberá tener un grado de precisión de
hasta 3 cifras significativas en las mediciones; esto para evitar desajustes futuros en todos sus
elementos. A continuación se detallan los elementos necesarios en la manufactura de cada una de
sus partes, para comenzar la elaboración de cada piezas es necesario el conjunto de planos del
sistema de recolección de fichas ahí se detallan las mediciones y el número de piezas a realizar.
5.3.1 SOPORTE MOTOR DE RECOLECCIÓN

43
Tabla 5.3.1 material, herramientas, instrumentos y equipo necesario para elaborar soporte motor de recolección.
Procedimiento de elaboración:
− Tomar una platina de aluminio con 1” de ancho por ½” de espesor y tomar el plano soporte de
motor recolección.
− Colocar la platina en una mesa tomar una escuadra y regla. Marcar una porción de material
con 1.562” de largo, 0.562” de ancho y 1.375” de alto; posteriormente cortar con sierra esas
dimensiones.
− Trasladar el bloque a la fresadora, rectificar y afinar la superficie hasta tener 1.5” de largo, 0.5”
de ancho y 1” de alto; luego verificar las medidas con un vernier.
− Trazar agujeros en la mesa de trazos con su respectiva ubicación (verificar plano soporte de
recolección) en la pieza.
− Centrar la pieza en la fresadora, mandrinar el agujero de 0.968” (agujero más grande de la
pieza).
− Centrar en el taladro de banco y perforar tres agujeros de 0.138" con la broca numero 36, dos
de ellos con 0.37” de profundidad y uno hasta traspasar la pieza.
− Verificar el acabado de la superficie con el de los agujeros y colocar y asegurar fijamente la
pieza en una prensa.
Cantidad 1
Material Platina de aluminio(1" de
ancho por 1/2" de espesor)Velocidad corte 500 rpm.Velocidad de maquinado 1500 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Calibre de roscas Sierra vertical Fresa 1/2" y 2" regla Fresadora vertical Broca #36 escuadra Mesa de trazos Barra de mandrinar 1/2" Vernier digital Mesa de trazos Machuelos 6-32

44
− Introducir el machuelo de 6-32 tomar el porta machuelo de su respectivo mango; comenzar a
girarlo para ir introduciéndolo poco a poco en las perforaciones así irle dando forma a la rosca
(para realizar roscas se deben pasar al menos dos machuelos uno de entrada de rosca y otro
de afinado de rosca).
− Verificar las medidas e introducir los pernos para los cuales se roscó para dar por finalizada la
pieza. Si existen problemas con la rosca repasar machuelos hasta obtener un paso suave y sin
atascamiento de los pernos y prisionero.
5.3.2 RODETE DE RECOLECCIÓN
Tabla 5.3.2 material, herramientas, instrumentos y equipo necesario para elaborar rodete de
recolección.
Procedimiento de elaboración:
− Tomar el plano de rodete de recolección, luego tomar un trozo de barra de nylamid de 2 ¼ de
pulgada, colocarlo en el torno y reducir la superficie circular hasta 1.97” de diámetro.
Cantidad 1
Material Barra de nylamid de 2 ¼”
Velocidad corte 300 rpm.Velocidad de maquinado 100 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier Torno Buriles 1/2" regla FresadoraFresa 1/2" Machuelos Broca #28 (0.140”) Broca #41 (0.096) lima

45
− Colocar el cilindro maquinado en la fresa y desbastarle hasta obtener un espesor de 0.688”
verificar el acabado superficial y afinar con lija 300.
− Llevar la pieza a la mesa de trazo: marcar el centro de la pieza, cuatro líneas a 90 grados de
distancia con su centro a la mitad de la circunferencia este trazo deberá realizarse con un
compás, ya que en el punto de intersección de ambas líneas se realizaran las perforaciones de
lado a lado; la posición en donde se harán las dos perforaciones laterales servirán para colocar
el imán y el prisionero respectivamente.
− Llevar la pieza en el taladro de banco para introducir lateralmente la broca #41 de 0.096”
verificar posición en el plano.
− Soltar la pieza y girarla 90 grados, introducir la broca #28 de 0.140”, hasta encontrarse con el
agujero que servirá para el eje del motor de recolección.
− Girar nuevamente la pieza 90 grados y realizar las cuatro perforaciones de lado a lado con la
broca de 3/8” esto con el fin de reducir la masa de la pieza.
− Desmontar la pieza y colocarla nuevamente en la fresadora para realizar un leve desbaste de
½” de diámetro y 0.070” de profundidad escariado. Este servirá para el imán recolector
(verificar la posición del agujero en el plano).
5.3.3 TOBOGÁN DE RECOLECCIÓN
Tabla 5.3.3 material, herramientas, instrumentos y equipo necesario para elaborar tobogán de
recolección.
Cantidad 1 Material Lamina acero inox. De 1 mm.Velocidad de maquinado 200 rpm.
Recursos necesarios:
Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica Cizalla Lima vernier de altura Pulidora Esmeril Vernier Fresadora Dobladora Dobladora Fresa 1/2" Broca 1/16

46
Procedimiento de elaboración:
− Tomar plano de tobogán de recolección, una porción de lámina de acero inoxidable.
− Cortar un cuadro con 2.625” de largo por 1.312” de ancho con una sierra y verificar medidas de
corte.
− Llevar la porción de material cortada a la mesa de trazos, verificar en el plano de la pieza para
trazar los cortes y dobles a realizar tal y como se detalla en el mismo.
− Con una cizalla realizar el corte circular de la pieza y con la ayuda de un disco de corte
montado en una pulidora pequeña realizar los cortes laterales.
− Colocar la lámina en una dobladora y realizar los dobles en los puntos trazados y de la forma
que lo dice el plano.
− Terminados los cortes eliminar filos y pulir a mano la pieza.
5.3.4 SOPORTE DE TOBOGÁN DE RECOLECCIÓN
Tabla 5.3.4 material, herramientas, instrumentos y equipo necesario para elaborar soporte tobogán
de recolección.
Cantidad 1 Material Lamina acero inox. De 1 mm.Velocidad de maquinado 100 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Disco f ino de corte Cinta métrica CizallaLima vernier de altura Pulidora Esmeril Vernier FresadoraDobladora DobladoraTenaza de presión Broca #18 (0.170")

47
Procedimiento de elaboración:
− Tomar plano de soporte de tobogán de recolección y una porción de lámina acero inoxidable.
− Cortar dos rectángulos de 1.375” de largo por 0.344” de ancho con una sierra.
− Colocar en la mesa de trazos ambas porciones, marcar el dobles, el corte y el agujero que se
realizara (verificarlos en el plano ya que son dos piezas simétricas pero con dobles opuesto).
− Sujetar la porción de lámina con una tenaza de presión y comenzar a desbastar el corte hasta
la línea marcada
− llevar la pieza al taladro de banco y realizar un agujero 0.170” a cada una de las piezas.
− Desmontar cada una de las piezas y llevarlas a la dobladora para realizar los dobles como lo
indica el plano.
− Pulir a mano la pieza desbastar las esquinas con filo.
5.4 PROCESO DE CONSTRUCCIÓN DEL SISTEMA DE GIRO Y AVANCE
Elaborar este sistema con bastante precisión es muy importante; ya que del ajuste de este mismo
depende el avance correcto del prototipo. Para elaborar todos los elementos de este sistema se
necesita el conjunto de planos del sistema de giro y avance. Incluye soportes de motor con sus
ruedas y los rodos de precisión que necesitan una manufactura con ajuste de calidad a
continuación se detallan los elementos necesarios para la elaboración de cada componente que
incluyen los sub – conjuntos, como también las operaciones importantes para su manufactura.
5.4.1 SOPORTES DEL MOTOR DE GIRO Y AVANCE

48
Tabla 5.4.1 material, herramientas, instrumentos y equipo necesario para elaborar soporte motor
de giro y avance.
Procedimiento de elaboración:
− Tomar planos de soportes para motores de tracción, luego una platina de aluminio con 1 ½” de
ancho por 1” de espesor.
− Medir y marcar en una meza de trazos con una escuadra y regla una porción de material con
2.32” de largo, 1.1” de ancho y 1” de alto. Colocar el trozo de material en una prensa, cortar
con sierra esas dimensiones.
− Tomar el bloque, fijarlo en la fresadora para rectificar y afinar la superficie hasta tener 2.22” de
largo, 1” de ancho y 0.9” de alto; luego verificar las medidas con el vernier.
− Trazar 7 agujeros con su respectiva ubicación en la pieza, verificar plano soporte tracción lado
derecho e izquierdo y marcar su ubicación en cada una de las piezas.
− Llevar y centrar en el taladro de banco y perforar todos los agujeros de 0.1360" con la broca
#29 verificar los planos para tener detalles extras.
− Verificar el acabado de la superficie con el de los agujeros y colocar la pieza en una prensa,
asegurarla bien, introducir el machuelo de 8-32, tomar el porta machuelo de su respectivo
mango; comenzar a girarlo para ir introduciéndolo poco a poco en las perforaciones y así irle
dando forma a la rosca.
− Finalizado el roscado de los agujeros colocar la pieza en la fresa y hacerle un corte interior que
tiene 1.61” de largo, 1” de ancho y 0.74” pulgadas de alto.
Cantidad 2
Material Platina de aluminio(1 1/2" de ancho por 1" de espesor)
Velocidad de maquinado 500 rpm. Velocidad de afinado 1500 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital Sierra vertical Fresa 1/2" y 2" Calibre de roscas Fresadora vertical Machuelos 8-32 regla Mesa de trazos broca #29 (0.136") escuadra

49
− Como último paso verificar las medidas según planos e introducir los pernos para los cuales se
roscó para dar por finalizada la pieza.
− Si existen problemas con la rosca repasar machuelos hasta obtener un paso suave y sin
atascamiento de los pernos y prisionero. Nota: una de las piezas lleva un corte extra verificar
plano.
5.4.2 RUEDA DE TRACCIÓN
Tabla 5.4.2 material, herramientas, instrumentos y equipo necesario para elaborar rueda de
tracción.
Procedimiento de elaboración:
− Tomar plano rueda de tracción, luego un trozo de barra de nylamid de 2 ¼ de pulgada.
− Colocar la barra en el torno y reducir la superficie circular hasta 1.37 pulgadas de diámetro.
Cantidad 2 Material Barra de nylamid de 2 ¼” Velocidad de maquinado 500 rpm. Velocidad de afinado 1000 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufacturaSierra Vernier digital tornoBuriles 1/2" Calibre de roscas Fresadora vertical Broca de centrar regla Mesa de trazos Fresa 1/2" escuadra Machuelo M2x0.4 Broca #47 (0.790)

50
− Sujetar el cilindro maquinado en la fresa y desbastarle hasta obtener un espesor de 0.315 -
0.32 de pulgada; verificar el acabado superficial y afinar con lija 300.
− Colocar la pieza en la mesa de trazo marcar el centro de la circunferencia, el centro del
espesor y a partir de ese centro ubicar dos puntos a 0.105” de distancia que servirán como
referencia para crear un diámetro menor de 1.26 pulgadas; marcar seis líneas a 60 grados de
distancia. Luego ubicar un compás en el centro de la circunferencia y abrirlo hasta una
distancia de 0.965 pulgadas y en el punto de intersección de ambas líneas se realizaran
agujeros roscados que servirán para sujetar la estrella de acople a los motores.
− Sujetar la rueda en el taladro de banco y en los seis puntos marcados a lo largo de su
circunferencia introducir la broca #47 de 0.079” hasta 0.15”de profundidad.
− En el centro de la circunferencia que se marco introducir una broca de 1/4” y escariar el
agujero hasta 9/32”.
− Realizadas las perforaciones introducir un machuelo M2x0.4 en los seis agujeros de igual
diámetro para roscarlos hacer el mismo procedimiento de roscado que los soportes de motor
(ver detalles en plano rueda de tracción).
− Para crear el diámetro menor en el cual se ubicaran los orines, se utilizaran como referencia
las dos líneas marcada a lo largo de su espesor, para ello ubicar la pieza en el torno y con el
buril desbastar hasta la profundidad indicada.
− Para dar por termina la rueda tomar un pie de rey verificar las medidas y verificar el acabado
superficial.
5.4.3 EJE DE RODO

51
Tabla 5.4.3 material, herramientas, instrumentos y equipo necesario para elaborar eje de rodo.
Procedimiento de elaboración:
− Tomar plano eje de rodo, una barra de aluminio de ½ pulgada de diámetro, cortar 0.8” de largo
y verificar con un vernier que el diámetro es uniforme.
− Posteriormente colocarla en el torno, ajustar el buril de ½” y reducir una porción de la superficie
circular hasta 0.247” – 0.249” pulgadas de diámetro y 0.277” de espesor. En esta zona crear
una ranura a 0.060” de distancia desde el extremo con un ancho de 0.031” – 0.034” y un
diámetro de 0.222” – 0.224”.
− Colocar la pieza en la mesa de trazo marcar el centro de la circunferencia, colocarla en el
taladro de banco y perforarle un agujero de 0.1495” con la broca #25 y 0.25” de profundidad.
− Desmontar la pieza llevarla a una prensa sujetarla bien, introducir el machuelo 10-24 tomar el
porta machuelo de su respectivo mango; comenzar a girarlo para ir introduciéndolo poco a
poco en la perforación así irle dando forma a la rosca (para realizar roscas se deben pasar al
menos dos machuelos uno de entrada de rosca y otro de afinado de rosca).
− Como último paso verificar las medidas e introducir los pernos para los cuales se roscó para
dar por finalizada la pieza. Si existen problemas con la rosca repasar machuelos hasta obtener
un paso suave y sin atascamiento de los pernos y prisionero. Finalizadas estas operaciones
afinar las superficies con lija 300.
Cantidad 4 Material Barra de aluminio de ½” Velocidad de maquinado 500 rpm. Velocidad de afinado 1000 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital tornoBuril 1/2" Calibre de roscas Fresadora vertical Broca de centrar regla Mesa de trazos Fresa 1/2" escuadra Machuelo 10-24 Broca #25 (0.1495)

52
5.4.4 BUJE DE EJE
Tabla 5.4.4 material, herramientas, instrumentos y equipo necesario para elaborar buje de eje.
Procedimiento de elaboración:
− Tomar plano buje de eje, un trozo de barra de nylamid de ½ de pulgada, verificar con un
vernier que la medida es uniforme posteriormente.
− Colocar la porción de material en el torno y reducir una sección de la superficie circular hasta
0.375” – 0.376” pulgadas de diámetro y 0.1” de espesor.
− Sujetar la pieza en la fresadora reducir la porción que tiene ½” de diámetro hasta un espesor
de 0.058” – 0.060”.
− Luego colocar la pieza en la mesa de trazo marcar el centro de la circunferencia.
− Colocar la pieza en el taladro de banco y escariarle un diámetro de 0.25”. Terminada dicha
operaciones verificar medidas con un vernier y afinar el acabado superficial con lija 300,
verificarlo y dar por terminada la pieza.
Cantidad 4 Material Barra de nylamid de ½” Velocidad de maquinado 400 rpm. Velocidad de afinado 1200 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital tornoBuriles 1/2" Calibre de roscas Fresadora vertical Broca de centrar regla Mesa de trazos Machuelos escuadra escariador

53
5.4.5 SOPORTE DE RODO
Tabla 5.4.5 material, herramientas, instrumentos y equipo necesario para elaborar soporte de rodo.
Procedimiento de elaboración:
− Tomar una platina de aluminio con 1” de ancho por ½” de espesor, medir y marcar en una
mesa de trazos, tomar una escuadra y regla una porción de material con 0.8” de largo, 0.8” de
ancho y 0.7” de alto. Luego cortar con sierra a esas dimensiones.
− Colocar el bloque en la fresadora rectificar y afinar la superficie hasta tener 0.625” de largo,
0.625” de ancho y 0.5” de alto; luego verificar las medidas con el fin de obtener un mayor grado
de precisión con un buen acabado superficial.
− Llevar la pieza a la mesa de trazos y con plano en mano ubicar las dos perforaciones a
realizar.
− Luego trasladar la pieza al taladro de banco y hacer una perforación de 3/32” de lado a lado.
Girar la pieza y realizarle un escariado de 0.375” con una profundidad de 0.15”.
Cantidad 4
MaterialPlatina de aluminio(1" de ancho por 1/2" de espesor)
Velocidad de maquinado 500 rpm.Velocidad de afinado 1200 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital tornoBuriles 1/2" Calibre de roscas Fresadora vertical Broca de centrar regla Mesa de trazos Machuelos escuadra broca 3/32 escariador

54
− Finalizadas las perforaciones colocar la pieza en la fresa y hacerle un corte interior que tiene
0.625” de largo, 0.325” – 0.335” de ancho y 0.525 pulgadas de alto.
− Como último paso verificar las medidas según plano y afinar superficie con lija 300.
5.4.6 PIN DE RUEDA
Tabla 5.4.6 material, herramientas, instrumentos y equipo necesario para elaborar pin de rueda.
Procedimiento de elaboración:
− Tomar plano pin de rueda, un perno de acero 01 M3x0.5 de 0.1181” pulgada de diámetro, 0.6”
de largo aproximadamente.
− Colocarlo en el torno rectificarlo hasta 0.093” – 0.091” de diámetro.
− Marcar 0.562” de largo llevar la pieza a un esmeril hasta obtener el largo deseado.
− Finalizadas estas operaciones afinar la superficie con lija 400 y tomar medidas.
Cantidad 4
Material Acero 01Velocidad de maquinado 3500 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica PulidoraLima Vernier tornoEsmeril Tenaza de presión
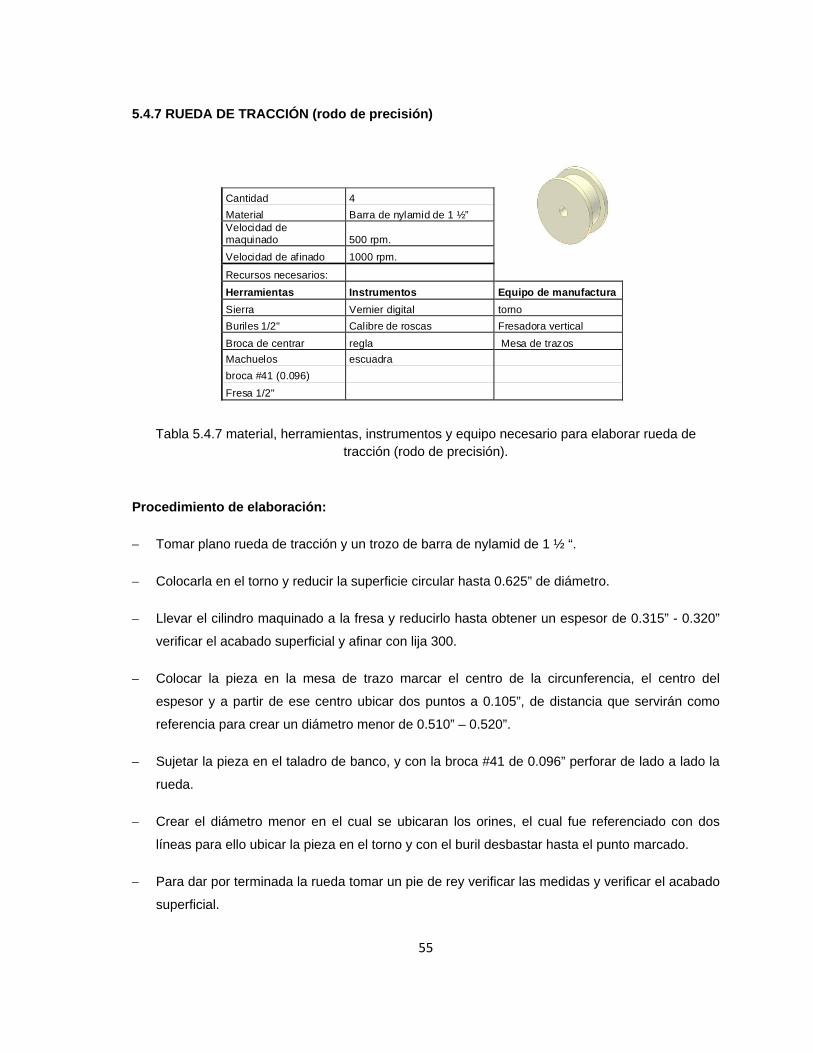
55
5.4.7 RUEDA DE TRACCIÓN (rodo de precisión)
Tabla 5.4.7 material, herramientas, instrumentos y equipo necesario para elaborar rueda de tracción (rodo de precisión).
Procedimiento de elaboración:
− Tomar plano rueda de tracción y un trozo de barra de nylamid de 1 ½ “.
− Colocarla en el torno y reducir la superficie circular hasta 0.625” de diámetro.
− Llevar el cilindro maquinado a la fresa y reducirlo hasta obtener un espesor de 0.315” - 0.320”
verificar el acabado superficial y afinar con lija 300.
− Colocar la pieza en la mesa de trazo marcar el centro de la circunferencia, el centro del
espesor y a partir de ese centro ubicar dos puntos a 0.105”, de distancia que servirán como
referencia para crear un diámetro menor de 0.510” – 0.520”.
− Sujetar la pieza en el taladro de banco, y con la broca #41 de 0.096” perforar de lado a lado la
rueda.
− Crear el diámetro menor en el cual se ubicaran los orines, el cual fue referenciado con dos
líneas para ello ubicar la pieza en el torno y con el buril desbastar hasta el punto marcado.
− Para dar por terminada la rueda tomar un pie de rey verificar las medidas y verificar el acabado
superficial.
Cantidad 4 Material Barra de nylamid de 1 ½”Velocidad de maquinado 500 rpm.Velocidad de afinado 1000 rpm.
Recursos necesarios:Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital tornoBuriles 1/2" Calibre de roscas Fresadora vertical Broca de centrar regla Mesa de trazos Machuelos escuadra broca #41 (0.096) Fresa 1/2"
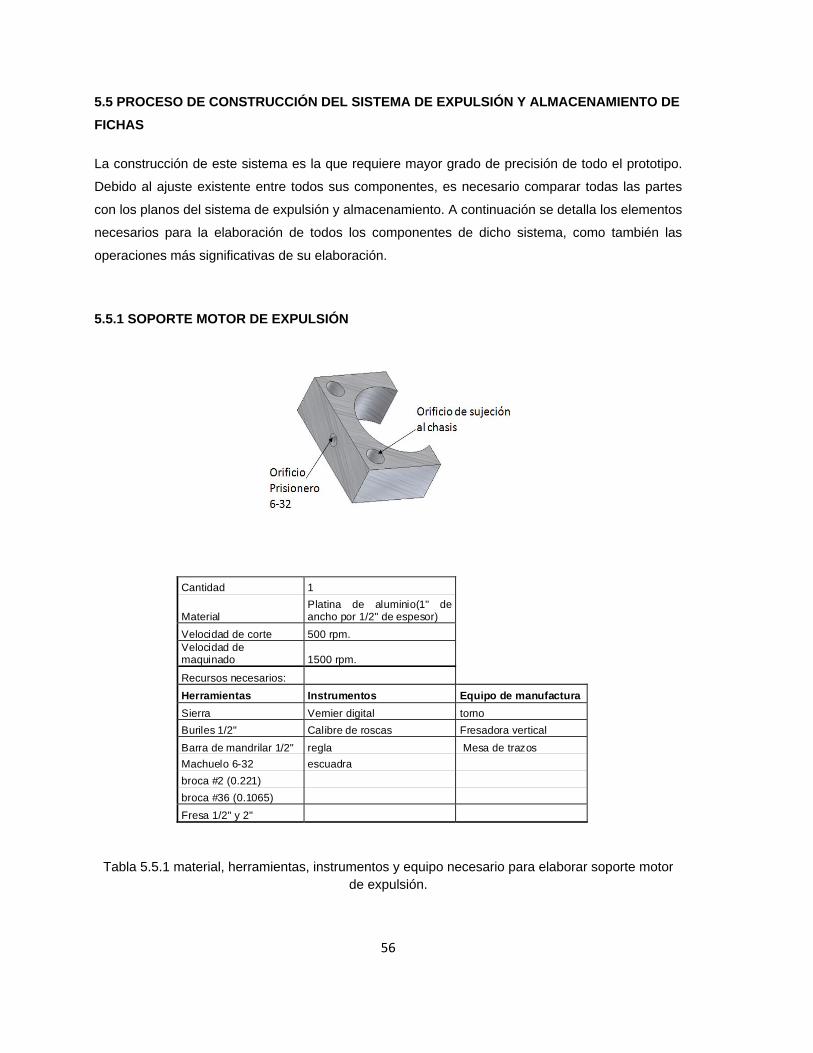
56
5.5 PROCESO DE CONSTRUCCIÓN DEL SISTEMA DE EXPULSIÓN Y ALMACENAMIENTO DE FICHAS
La construcción de este sistema es la que requiere mayor grado de precisión de todo el prototipo.
Debido al ajuste existente entre todos sus componentes, es necesario comparar todas las partes
con los planos del sistema de expulsión y almacenamiento. A continuación se detalla los elementos
necesarios para la elaboración de todos los componentes de dicho sistema, como también las
operaciones más significativas de su elaboración.
5.5.1 SOPORTE MOTOR DE EXPULSIÓN
Tabla 5.5.1 material, herramientas, instrumentos y equipo necesario para elaborar soporte motor de expulsión.
Cantidad 1
Material Platina de aluminio(1" de ancho por 1/2" de espesor)
Velocidad de corte 500 rpm.Velocidad de maquinado 1500 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital tornoBuriles 1/2" Calibre de roscas Fresadora verticalBarra de mandrilar 1/2" regla Mesa de trazosMachuelo 6-32 escuadra broca #2 (0.221) broca #36 (0.1065) Fresa 1/2" y 2"

57
Procedimiento de elaboración:
− Tomar una platina de aluminio con 1” de ancho por ½” de espesor y tomar el plano soporte de
motor expulsión.
− Colocar la platina en una mesa tomar una escuadra y regla. Marcar una porción de material
con 1.562” de largo, 0.562” de ancho y 1.375” de alto; posteriormente cortar con sierra esas
dimensiones.
− Trasladar el bloque a la fresadora, rectificar y afinar la superficie hasta tener 1.375” de largo,
0.5” de ancho y 1” de alto; luego verificar las medidas con un vernier.
− Trazar agujeros en la mesa de trazos con su respectiva ubicación (verificar plano soporte de
recolección) en la pieza.
− Centrar la pieza en la fresadora, mandrinar el agujero de 0.968” (agujero más grande de la
pieza).
− Centrar en el taladro de banco y perforar dos agujeros de 0.221" con la broca #2, estos
deberán ir de lado a lado hasta traspasar la pieza. Luego perforar un agujero de 0.1065” con la
broca #36 hasta encontrar la circunferencia mandrinada.
− Verificar el acabado de la superficie con el de los agujeros y colocar y asegurar fijamente la
pieza en una prensa.
− Introducir el machuelo de 6-32 tomar el porta machuelo de su respectivo mango; comenzar a
girarlo para ir introduciéndolo poco a poco en las perforaciones así irle dando forma a la rosca
(para realizar roscas se deben pasar al menos dos machuelos uno de entrada de rosca y otro
de afinado de rosca).
− Verificar las medidas e introducir los pernos para los cuales se roscó para dar por finalizada la
pieza. Si existen problemas con la rosca repasar machuelos hasta obtener un paso suave y sin
atascamiento de los pernos y prisionero.
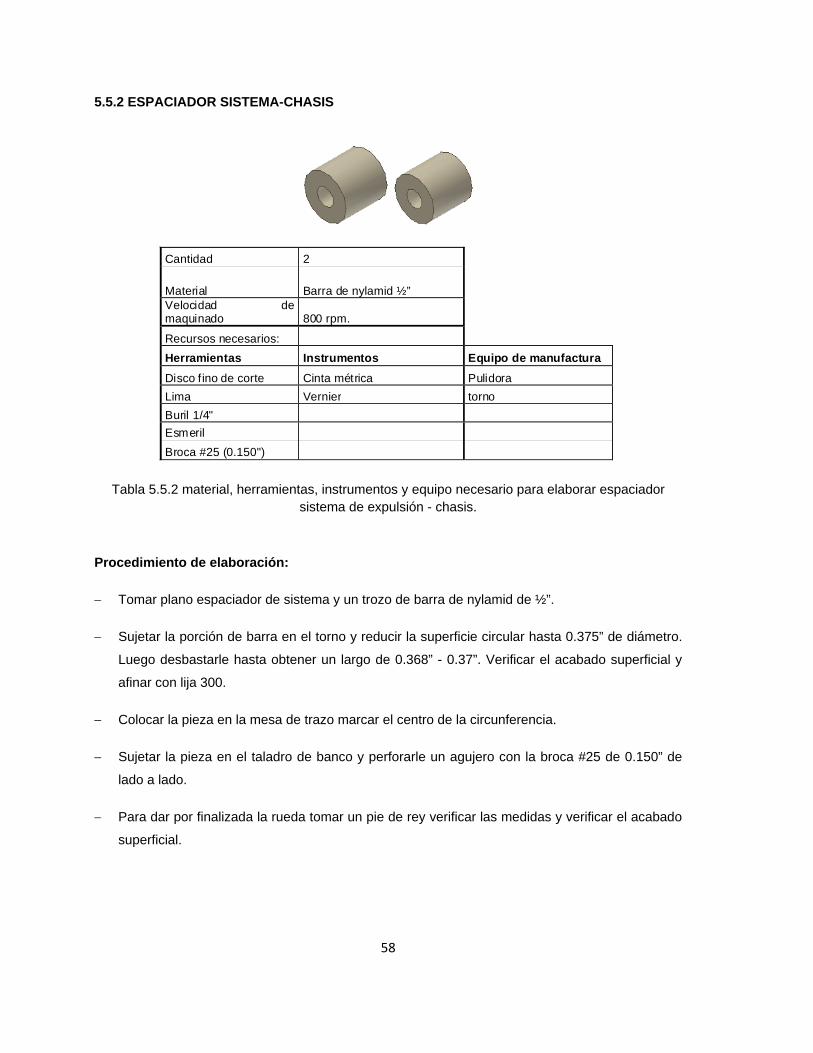
58
5.5.2 ESPACIADOR SISTEMA-CHASIS
Tabla 5.5.2 material, herramientas, instrumentos y equipo necesario para elaborar espaciador sistema de expulsión - chasis.
Procedimiento de elaboración:
− Tomar plano espaciador de sistema y un trozo de barra de nylamid de ½”.
− Sujetar la porción de barra en el torno y reducir la superficie circular hasta 0.375” de diámetro.
Luego desbastarle hasta obtener un largo de 0.368” - 0.37”. Verificar el acabado superficial y
afinar con lija 300.
− Colocar la pieza en la mesa de trazo marcar el centro de la circunferencia.
− Sujetar la pieza en el taladro de banco y perforarle un agujero con la broca #25 de 0.150” de
lado a lado.
− Para dar por finalizada la rueda tomar un pie de rey verificar las medidas y verificar el acabado
superficial.
Cantidad 2
Material Barra de nylamid ½” Velocidad de maquinado 800 rpm.
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica PulidoraLima Vernier tornoBuril 1/4" Esmeril Broca #25 (0.150")

59
5.5.3 SOPORTE SISTEMA DE ALMACENAMIENTO Y EXPULSIÓN
Tabla 5.5.3 material, herramientas, instrumentos y equipo necesario para elaborar soporte sistema almacenamiento y expulsión.
Procedimiento de elaboración:
− Tomar plano soporte sistema de almacenamiento y expulsión, y una porción lámina de acero
inoxidable de 1mm.
− Cortar un rectángulo de 2.35” de largo por 1.2” de alto, luego tomar dimensiones con una cinta
métrica y reducirla hasta tener 2.25” de largo por 1.027” de alto.
− Colocar el rectángulo en la mesa de trazos y con plano en mano marcar los cortes a realizar,
estos deberán realizarse con un disco fino montado en una pulidora pequeña.
− Finalizados los cortes llevar la pieza al esmeril quitar las puntas y reducir hasta las medidas
pedidas.
Cantidad 2
Material Lamina acero inox. De 1 mm.Velocidad de corte 300 rpm. Recursos necesarios:
Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica Pulidora Lima Vernier torno Esmeril Dobladora Dobladora Broca #25 (0.150")
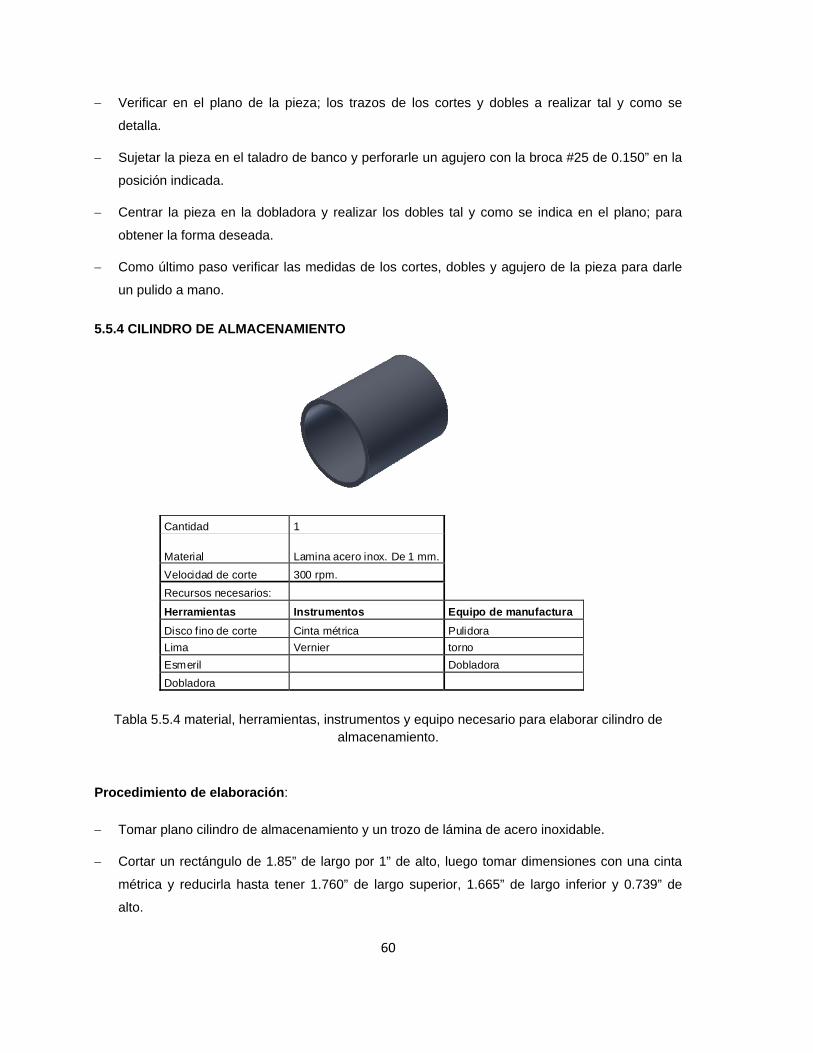
60
− Verificar en el plano de la pieza; los trazos de los cortes y dobles a realizar tal y como se
detalla.
− Sujetar la pieza en el taladro de banco y perforarle un agujero con la broca #25 de 0.150” en la
posición indicada.
− Centrar la pieza en la dobladora y realizar los dobles tal y como se indica en el plano; para
obtener la forma deseada.
− Como último paso verificar las medidas de los cortes, dobles y agujero de la pieza para darle
un pulido a mano.
5.5.4 CILINDRO DE ALMACENAMIENTO
Tabla 5.5.4 material, herramientas, instrumentos y equipo necesario para elaborar cilindro de almacenamiento.
Procedimiento de elaboración:
− Tomar plano cilindro de almacenamiento y un trozo de lámina de acero inoxidable.
− Cortar un rectángulo de 1.85” de largo por 1” de alto, luego tomar dimensiones con una cinta
métrica y reducirla hasta tener 1.760” de largo superior, 1.665” de largo inferior y 0.739” de
alto.
Cantidad 1
Material Lamina acero inox. De 1 mm.Velocidad de corte 300 rpm.Recursos necesarios:
Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica Pulidora Lima Vernier torno Esmeril Dobladora Dobladora

61
− Colocar el trapecio en la mesa de trazos y con plano en mano marcar los cortes a realizar,
estos deberán realizarse con un disco fino montado en una pulidora pequeña.
− Finalizados los cortes llevar la pieza al esmeril quitar las puntas y reducir hasta las medidas
pedidas.
− Verificar el plano de la pieza los trazos de los cortes y los puntos de soldadura TIG a realizar
para unir los extremos de la lámina. Finalizada la soldadura verificar medidas y acabado
superficial de la pieza, si es necesario pulir a mano.
5.5.5 EJE MOTOR DE EXPULSIÓN
Tabla 5.5.5 material, herramientas, instrumentos y equipo necesario para elaborar eje motor de expulsión.
Procedimiento de elaboración:
− Tomar plano eje motor de expulsión, un eje de acero 1045, cortar una porción de 1.5” de largo.
Cantidad 1 Material Acero (AISI 1045)Velocidad de corte 300 rpm.Velocidad de maquinado 1000
Recursos necesarios: Herramientas Instrumentos Equipo de manufactura Sierra Vernier digital tornoBurile 1/4" Calibre de roscas Fresadora vertical Barra de mandrinar 1/2" regla Mesa de trazosmachuelo 5-40 escuadra broca #38 (0.102) Fresa 1/2"

62
− Colocarla en el torno rectificar la porción hasta 0.25” diámetro mayor, después marcar 0.80” de
largo que será la porción que tendrá un diámetro menor de 0.126”, luego marcar en el extremo
0.031” de largo y reducir en esa sección el diámetro hasta 0.125” este cambio de diámetro es
para asegurar un tope para el disco móvil de expulsión.
− Sujetar la pieza del otro extremo y refrentar ese extremo hasta que tenga un largo de 0.400”.
Verificar medidas con un vernier.
− Marcar el centro de la circunferencia en esta sección de mayor diámetro, luego trasladar la
pieza y escariarle un diámetro de 0.079” hasta una profundidad de 0.32”.
− Girar la pieza y sujetar a lo largo marcar una distancia de 0.200” desde el extremo; en este
punto introducir la broca #38 que tiene un diámetro de 0.102” perforar de lado a lado.
− Verificar el acabado de la superficie con el de los agujeros y colocar la pieza en una prensa
asegurarla bien, introducir el machuelo de 5-40 tomar el porta machuelo de su respectivo
mango; comenzar a girarlo para ir introduciéndolo poco a poco en esta ultima perforación para
irle dando forma a la rosca (para realizar roscas se deben pasar al menos dos machuelos uno
de entrada de rosca y otro de afinado de rosca).
− Como último paso darle un pulido a mano, verificar las medidas e introducir el prisionero para
los cuales se roscó para dar por finalizada la pieza. Si existen problemas con la rosca repasar
machuelos hasta obtener un paso suave y sin atascamiento del prisionero.
5.5.6 CILINDRO SOPORTE DISCO FIJO
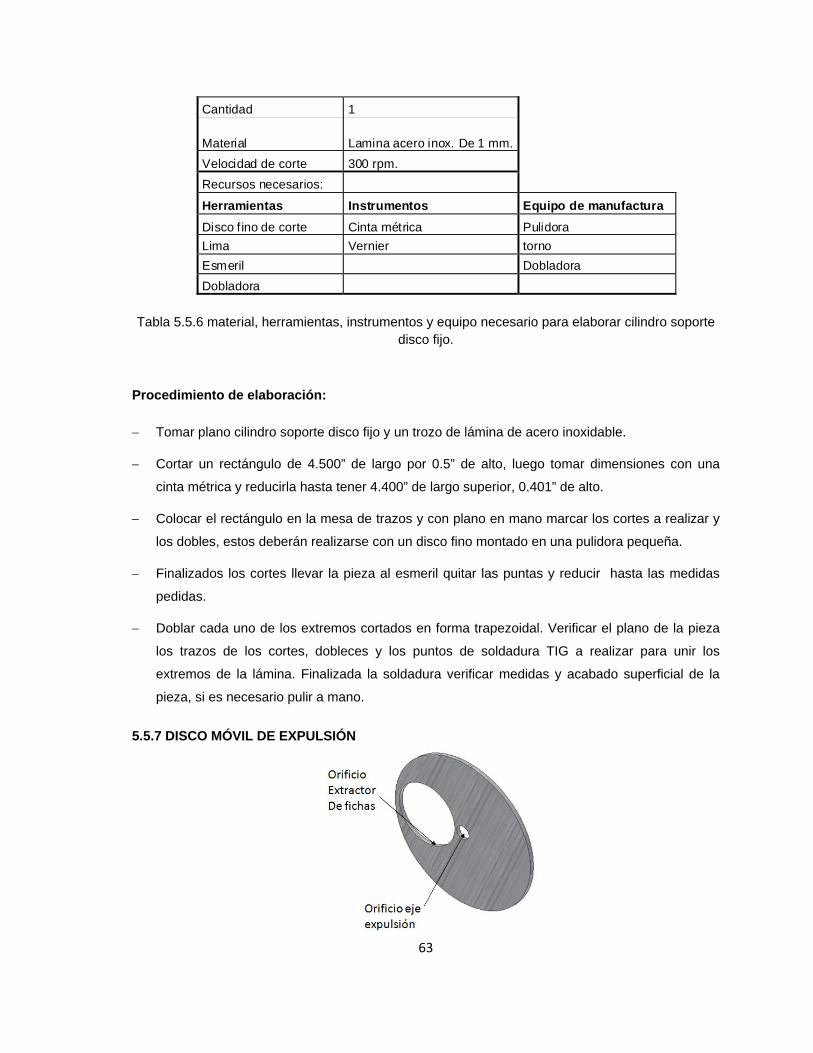
63
Tabla 5.5.6 material, herramientas, instrumentos y equipo necesario para elaborar cilindro soporte disco fijo.
Procedimiento de elaboración:
− Tomar plano cilindro soporte disco fijo y un trozo de lámina de acero inoxidable.
− Cortar un rectángulo de 4.500” de largo por 0.5” de alto, luego tomar dimensiones con una
cinta métrica y reducirla hasta tener 4.400” de largo superior, 0.401” de alto.
− Colocar el rectángulo en la mesa de trazos y con plano en mano marcar los cortes a realizar y
los dobles, estos deberán realizarse con un disco fino montado en una pulidora pequeña.
− Finalizados los cortes llevar la pieza al esmeril quitar las puntas y reducir hasta las medidas
pedidas.
− Doblar cada uno de los extremos cortados en forma trapezoidal. Verificar el plano de la pieza
los trazos de los cortes, dobleces y los puntos de soldadura TIG a realizar para unir los
extremos de la lámina. Finalizada la soldadura verificar medidas y acabado superficial de la
pieza, si es necesario pulir a mano.
5.5.7 DISCO MÓVIL DE EXPULSIÓN
Cantidad 1
Material Lamina acero inox. De 1 mm.Velocidad de corte 300 rpm. Recursos necesarios:
Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica PulidoraLima Vernier torno Esmeril Dobladora Dobladora

64
Tabla 5.5.7 material, herramientas, instrumentos y equipo necesario para elaborar disco móvil de expulsión.
Procedimiento de elaboración:
− Tomar plano disco móvil de expulsión, una porción de lámina de acero inoxidable de 1 mm. de
espesor.
− Cortar un cuadrado de 1.500” de lado, luego colar la lámina en la mesa de trazo y marcar el
centro del cuadrado; a partir de este con la ayuda de un compás marcar una circunferencia de
1.360” y otra de 0.125” de diámetro. A partir de ese centro marcar una distancia de 0.360”.
− llevar la pieza al taladro de banco y en el centro del cuadrado perforarle agujero con una broca
de 1/8”. Con la ayuda de disco corte reducir el cuadrado a las dimensiones de la
circunferencia, afinar el acabado de la misma en el esmeril y tomar medida con un vernier.
− Luego trasladar la pieza y escariarle un diámetro de 0.560” en el punto marcado a 0.360” de
distancia del centro. Verificar las medidas, afinar el acabado a mano y corroborar con el plano
de la pieza.
Cantidad 1
Material Lamina acero inox. De 1 mm.Velocidad de corte 300 rpm.Recursos necesarios:
Herramientas Instrumentos Equipo de manufactura Disco fino de corte Cinta métrica PulidoraLima Vernier torno Esmeril Dobladora Escariador Broca 1/8"

65
5.5.8 DISCO FIJO DE EXPULSIÓN
Tabla 5.5.8 material, herramientas, instrumentos y equipo necesario para elaborar disco fijo de expulsión.
Procedimiento de elaboración:
− Tomar plano disco fijo de expulsión, una porción de lámina de acero inoxidable de 1 mm. de
espesor.
− Cortar un cuadrado de 1.500” de lado, luego colar la lámina en la mesa de trazo y marcar el
centro del cuadrado; a partir de este con la ayuda de un compás marcar una circunferencia de
1.400” de diámetro. A partir de ese centro marcar una distancia de 0.358”.
− Con la ayuda de disco corte reducir el cuadrado a las dimensiones de la circunferencia, afinar
el acabado de la misma en el esmeril y tomar medida con un vernier.
− Luego trasladar la pieza y escariarle un diámetro de 0.625” en el punto marcado a 0.358” de
distancia del centro. Verificar las medidas, afinar el acabado a mano y corroborar con el plano
de la pieza.
Cantidad 1
Material Lamina acero inox. De 1 mm.
Velocidad de corte 300 rpm.Recursos necesarios: Herramientas Instrumentos Equipo de manufacturaDisco fino de corte Cinta métrica Pulidora
Lima Vernier torno
Esmeril Dobladora Escariador

66
5.6 PUESTA EN MARCHA DEL ROBOT
Una vez concluidos todos los elementos o piezas que conforman al robot karel, y una vez
corroborado que todas las piezas se han elaborado de forma correcta y se han ensamblado bien,
proseguimos a la puesta en marcha.
Primero que todo se recomienda que todos los elementos de sujeción que conforman al robot karel
estén colocados en posición correcta; luego se recomienda que los rodos y sistema de tracción
estén libres de fricción cuando giren, revisando por ejemplo los o´ring de los rines, que éstos
queden bien ajustados a la rueda de tracción para evitar posiblemente que el robot deslice sobre
la superficie en que se ponga en contacto; además los pines y bujes de los rodos deben de estar
bien ajustados para evitar que éstos puedan salirse de su respectivo ensamble, el eje del motor de
expulsión debe de quedar bien ajustado con el disco móvil para evitar algún desprendimiento al
momento de expulsar las fichas, por otra parte debe de procurarse que la superficie del tobogán
este bastante pulida para que la ficha que recoja el robot se deslice libremente.
Finalmente se recomienda que el sitio donde se coloque el robot karel sea una superficie bastante
uniforme, y luego con los motores bien conectados a la fuente de energía y a sus respectivos
circuitos se energizan para realizar los movimientos mencionados anteriormente, según sea la
decisión del usuario final de karel.
Al concluir la construcción del sistema karel se presentaron algunos percances referentes a
ajustes del tipo mecánico entre los cuales podemos citar: el sistema de recolección debió
balancearse para que el magneto de éste quedara siempre arriba del suelo, pues ya que
usualmente el magneto se posicionaba en dirección al suelo recogiendo fichas que no se la han
ordenado recoger; otro ajuste que se presento es que al colocar los circuitos sobre éste se
desequilibró dejando ciertos rodos más esforzados que otros y ocasionando problemas a la hora
del avance, esto se supero colocando trozos de barras de metal en la parte posterior del sistema
karel, quedando así balanceado todo el sistema.
Los logros que se tuvieron con karel en lo que respecta, es que todos los mecanismos que este
posee funcionaron muy bien (teniendo en cuenta siempre de ajustarlos mecánicamente), con el
único inconveniente que el sistema de expulsión posee un motor DC que no es controlada la
rotación de éste, por consiguiente cuando este quiere expulsar la ficha lleva tal velocidad debido al
motor que arrastra a la ficha sobre el agujero de expulsión.

67
CAPÍTULO 6. PARTICIPACIÓN MULTIDISCIPLINARIA EN EL SISTEMA KAREL
Como es bien sabido el robot karel tiene como objetivo la enseñanza a personas en el ámbito de la
programación; y como se ha mencionado anteriormente el robot karel básicamente posee la
función de recoger, almacenar y depositar fichas o tokens en un mundo dado; la presente tesis
forja la parte mecánica del robot detallando pieza a pieza; pero éste además de poseer una
estructura o un diseño mecánico el robot tiene una especie de “cerebro” electrónico, que compete
al área eléctrica en su tesis “Diseño de robot karel: punto de vista eléctrico y automatización de sus
funciones”; en la cual abordan la automatización de las funciones básicas de robot mediante el uso
de sensores ópticos (principio de reflexión de un haz de luz) en un mundo(cuadricula) trazado en el
piso con líneas negras; tales funciones son: avanzar, con esta función básicamente el robot
avanza una distancia determinada dentro del entorno o ambiente para recoger, depositar una ficha
o simplemente llegar a un punto (vértice de la cuadricula) previsto, además con estos sensores se
logro el alineamiento adecuado del robot cuando este se desplaza sobre dicha cuadricula;
recoger, en esta función literalmente el robot recoge una ficha si y solo si se detecta mediante los
sensores provistos en el robot; girar, el robot gira únicamente a la izquierda respecto del frente de
éste mediante el control eléctrico sobre los motores de tracción; depositar, el robot deposita fichas
en las intersecciones de la cuadricula.
Por otra parte la participación del grupo de computación con un importante aporte para el robot
karel en su tesis “Seguimiento a la plataforma de aprendizaje karel, el robot” en este apartado
básicamente computación ha mejorado la comunicación entre la interfaz de un ordenador y los
circuitos eléctricos; pues ya se tenía anteriormente una interfaz de karel. En dicha interfaz grafica
se le da el mandato u orden al robot para ejecutar cualquier movimiento o acción mencionados
anteriormente.
Para el ámbito mecánico fue imprescindible la participación del grupo de eléctrica, pues con ellos
se discutió la posición de los sensores en la estructura de karel, así como también la posición de
los circuitos; trayendo consigo desafíos técnicos, desde el tipo de motores de tracción hasta la
posición perfecta de los sensores.


69
CAPITULO 7. CONCLUSIONES Y RECOMENDACIONES
7.1 CONCLUSIONES
-Podemos concluir que en este tipo de proyectos se cimientan y maduran más los conceptos de
diseño, aprendidos en la carrera de ingeniería mecánica, así como también la habilidad en utilizar
algunas herramientas del taller.
-Se puede concluir que al finalizar este documento se deja un legado para futuros estudiantes o
personas interesadas en el sistema karel.
-Además podemos concluir que en este tipo de trabajos, la coordinación con grupos
multidisciplinarios es de vital importancia, porque de esa coordinación depende la eficiencia y el
tiempo invertido en el proyecto.
-Concluimos también que para la realización de este proyecto existen muchas vías alternas
(respecto al diseño); no hay parámetros definidos a seguir para la construcción del sistema karel
-Además, concluimos que la manufactura del sistema o robot karel es de vital precisión al
momento de elaborar los diferentes elementos que lo conforman.


71
7.2 RECOMENDACIONES
Funcionamiento
Es recomendable que el sistema de expulsión esté libre de golpes, pues las holguras son tan
pequeñas en este subconjunto que sus piezas podrían interferir unas con otras.
Se recomienda además el control de los motores de tracción en la parte interna de estos (sistemas
de engrane), con el objeto de que estos no posean rozamientos internos.
Además se recomienda que por lo menos cada año se revisen los bujes de los rodos, para evitar
desgaste y que estos tengan una holgura mayor a la permitida.
Mejoras
Se recomienda que para futuros prototipos de karel se le adapte un interruptor que accione al
motor de expulsión con el objeto de poder expulsar las fichas sin necesidad de poner en marcha al
robot.
Diseño
Recomendamos también que al cilindro de almacenamiento de fichas se le deje un poco más de
abertura, para tener mayor facilidad de colocación de partes eléctricas que se le deseen colocar.

73
GLOSARIO
BURIL: Herramienta de corte formada por una barra prismática, terminada en una punta de forma
variada de acero templado. Sirve fundamentalmente para cortar, ranurar o desbastar material en
frío. Comúnmente es utilizado en los tornos aunque existen diferentes tipos.
DOBLADORA: Máquina utilizada para otorgar una forma deseada o quiebre a láminas.
ESCARIAR: Operación de mecanizado que se realiza para conseguir un acabado fino y de
precisión en agujeros que han sido previamente taladrados con broca a un diámetro ligeramente
inferior.
FRESADO: Moldeo de piezas metálicas a través de un cortador giratorio con múltiples dientes, el
cual elimina el material para producir superficies planas y perfiladas, ranuras y surcos.
MANDRINAR: Operación de mecanizado que se realiza en los agujeros de las piezas cuando es
necesario conseguir medidas o tolerancias muy estrechas que con operaciones de taladrado no es
posible conseguir.
REFRENTAR: Mecanizado del extremo de una superficie, a través de la aplicación de una
herramienta perpendicular al eje de rotación siguiendo una trayectoria espiral plana.
ROSCADO: Mecanización helicoidal interior (tuercas) y exterior (tornillos) sobre una superficie
circular. Este tipo de sistemas de unión y sujeción (roscas) está presente en todos los sectores
industriales en los que se trabaja con materia metálica.
TALADRADO: Operación de mecanizado que tiene por objeto producir agujeros cilíndricos en una
pieza cualquiera, utilizando como herramienta una broca. La operación de taladrar se puede hacer
con un taladro portátil, con una máquina taladradora, en un torno, en una fresadora, en un centro
de mecanizado CNC o en una mandrinadora.
TORNEADO: Operación de mecanizado que se realiza en cualquiera de los tipos de torno que
existen. El torneado consiste en los mecanizados que se realizan en los ejes de revolución u otros
componentes que tengan mecanizados cilíndricos concéntricos o perpendiculares a un eje de
rotación tanto exteriores como interiores.
VELOCIDAD DE CORTE: Rapidez a la que funciona correctamente una herramienta de corte en
relación con la pieza de trabajo. Por lo general se define en metros por segundo, revoluciones por
minuto y pies por segundo.

74
CALIBRE O PIE DE REY: Instrumento para medir dimensiones de objetos relativamente
pequeños, desde centímetros hasta fracciones de milímetros (1/10 de milímetro, 1/20 de milímetro,
1/50 de milímetro).

75
REFERENCIAS
Futaba radio control (RC – R/C) Systems and Accessories
http://www.gpdealera.com/cgi-bin/wgainf100p.pgm?I=FUTM0004
Contiene información técnica y accesorios de los motores utilizados en el sistema de tracción
Mabushi motors CO. LTD.
http://www.mabuchi-motor.co.jp/cgi-bin/catalog/e_catalog.cgi?CAT_ID=rf_320eh
Contiene información técnica sobre los motores utilizados en el sistema de recolección y expulsión
de fichas.
Wikipedía la enciclopedia libre.
http://es.wikipedia.org
Contiene explicación de la aplicación de las diferentes herramientas y maquinas utilizadas.


77
BIBLIOGRAFÍA
Spotts, M.F. [1985] Design of Machine Elements. Prentice-hall Inc. 6th. Edition
Krar, Stephen f., Oswald, J.W. [1990] Technology of Machine Tools. McGraw-hill, Inc. 4th. Edition
C.E. CONOVER & CO, INC. Parker o-ring sizes and compound reference guides

ANEXO A
CODIFICACIÓN DE COMPONENTES DE SISTEMA KAREL
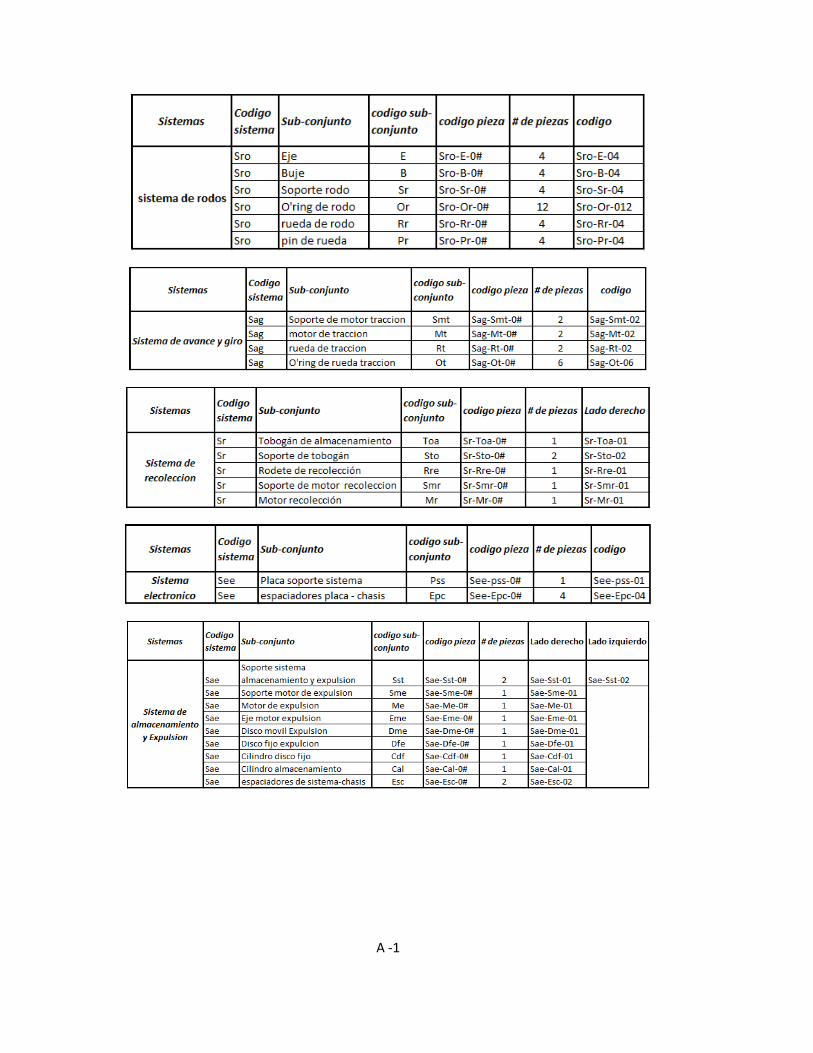
A ‐1

ANEXO B
PLANOS DE CONSTRUCCIÓN DE SISTEMA KAREL