PROYECTO
8
PROYECTO: ROBOT SEGUIDOR DE LÍNEA ESTUDIANTES: CALAMANI MAMANI JAIME CHOQUE CANAVIRI DANIEL HERRERA IRIARTE JOSE MANUEL QUISPE ESPEJO EDILBERTO
Transcript of PROYECTO

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 1/8
PROYECTO:
ROBOT SEGUIDOR DE LÍNEA
ESTUDIANTES:
CALAMANI MAMANI JAIME
CHOQUE CANAVIRI DANIEL
HERRERA IRIARTE JOSE MANUEL
QUISPE ESPEJO EDILBERTO

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 2/8
1. Titulo del proyecto.³ROBOT SEGUIDOR DE LINEA´
2. Resumen del proyecto: A mediados del semestre nos dimos a escoger entre varios proyectos entrelos cuales se encontraban los siguientes: Robot seguidor de linea Robot de sumo Polo acuatico Brazo posicionador
Finalmente nosotros optamos por hacer un seguidor de linea, en un principio porque,ademas de ser un circuito sencillo, era o es uno de los mas economicos, ya que solose requiere de pocos componentes electronicos ³baratos´ para realizarlo. Tambienconsideramos la posibilidad de entrar al concurso que se realizaria en marzo del 2009.
Para poder hacer esto, escogimos un circuito facil y funcional, la investigacion y partede la documentacion la obtuvimos de libros e Internet.
Tuvimos que realizar el proyecto en poco tiempo, montarlo y acudir con lasautoridades correspondientes para que nos evaluen dicho proyecto.
Pensando en algun problema que pudiera surgir, el mecanismo esta elaborado demanera sencilla, de esta forma se puede reparar algun desperfecto sin mayoresperdidas de tiempo, dinero y esfuerzo.
3. Planteamiento del problema:Disenar y armar un circuito y su una estructura mecanica capaz de realizar,por medio de un par de sensores, el seguimiento de una linea blanca conun fondo negro o una linea negra en fondo blanco.
4. Objetivos:
4.1 Objetivo general:Disenar el robot seguidor de linea y demostrar que este mismo es capaz de realizar loque se requiere.
4.2 Objetivos específicos:
y Para el primer parcial, disenar en un programa de simulacion el circuito delseguidor.
y Posteriormente realizar el circuito fisico y que funcione de manera correcta, sinerrores.
y Para el segundo parcial, realizar la parte mecanica del seguidor y
y montarle el circuito de manera que quede ensamblado y listo para presentar elproyecto.
y Finalmente realizar la documentacion del proyecto y entregarlo como proyectofinal del semestre.
5. Justificación del proyecto:El proyecto se desarrollo para que nosotros como alumnos apliquemos losconocimientos adquirido durante nuestros estudios de electronica en el uso desimuladores de circuitos electronicos como herramienta de apoyo para la realizacionde circuitos virtualmente aplicables en areas laborales de ingenieria que seaneficientes, de calidad y que cumplan con las demandas que se nos exigen.

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 3/8
6. Funcionamiento del circuito:El circuito se alimenta con 9 Volts, pasa por un diodo rectificador, despues por unregulador de voltaje, que alimenta, sensores, transistores y al inversor TTL (circuitointegrado). Una vez regulado el voltaje, toma la senal del sensor y la manda al inversor SCHMITT-TRIGGER, ya que asi puede incrementar la senal y mandarla a lostransistores, y estos a su vez alimentan los motores. Dependiendo de la recepcion ono de senales en los sensores, los motores se moveran, el seguidor puede distinguir entre luz y obscuridad, por lo que este mismo es capaz de seguir tanto linea blanca onegra, para lograrlo, se le puso un ³jumper´ que al cambiarle la configuracion del³jumper´ seguira en una pista de raya negra fondo blanco o raya blanca fondo negro.
Pensando en ganar el concurso tendriamos que aumentar la velocidad de los motores,tomando en cuenta que no se quemen los transistores, y eso dependera de acuerdocon las especificaciones de cada transistor.
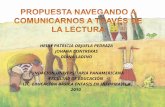
6.1 Estructura del circuito simulado.
Placa de los sensores

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 4/8
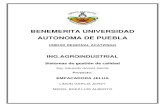
Placa de control
7. Marco teórico y diseño del seguidor de línea.Un robot automata que es capaz de seguir un camino dibujado, estaconstituido por 2 censores luz infrarrojos de los cuales se hace laadquisicion de datos que es mandada a un C.I. el cual controla esta senaldespues de procesarla entra a un C.l. el cual es apropiado la aplicacion enmotores, que este es que nos genera el movimiento.
Secuencia de armado de los circuitos.Lista de material placa de sensores:
1 Placa de sensores 2 Resistencias de 150F 2 Resistencias 22K F
Lista de material para placa de potencia: 1 Placa de potencia 1 Circuito integrado de 14 terminales 1 Base de 14 terminales para CI 1 Diodo IN4007
2 Resistencias de 1KF 2 Headers 2 Jumpers 3 Borneras de 2 tornillos para CI 2 Transistores BC547 1 Regulador 7805
y 1 Grapa para bateria de 9V

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 5/8
A continuacion se muestran los dos circuitos impresos que emplearas en elarmado de tu robot seguidor de linea.
Tablilla de potencia y de sensores respectivamente.
Conexion de las 2 tablillas:Una de las secciones a conectar entre si son la parte de los sensores y la de control.Ya que tenemos armada la tablilla de sensores y la tablilla de control identificamos lospuntos clave de interconexion.
Primero identificamos todos los puntos en la tablilla de sensores (es la linea que semuestra en la fotografia siguiente). Ya que los tenemos identificados los puntosterminales en la tablilla de sensores ahora identificamos los mismos puntos pero ahoraen la tablilla de control.
Parte mecánica.Lista del material:
2 Tornillos de 1/8 x 1/2 pulgadas con tuerca 2 Tornillos de 1/8 x 2 pulgadas con tuerca 2 Tuercas extra para los tornillos 2 Tornillos milimetricos 1 broche para pila de 9 V.
Herramientas: 1 Navaja para cortar 1 Broca de 1/8 de pulgada

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 6/8
1 Broca de 1/8 de pulgadas.
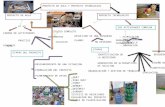
Secuencia de armado:Se cortan dos placas con una tablilla plastica. Ambas placas deberan quedar iguales las cuales deben tener las siguientes medidas:
Se realizaron las perforaciones siguientes:Cara superior.

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 7/8
Cara inferior.
Al tener las 2 placas cortadas y la secuencia de armado perforadas se empiesa adiseñar tal como muestra en las imágenes

5/12/2018 PROYECTO - slidepdf.com
http://slidepdf.com/reader/full/proyecto-55a4d502ee074 8/8