Sistema de Direccionamiento de las Antenas para el...
76
Sistema de Direccionamiento de las Antenas para el Vehículo Estratosférico Sabio Caldas Carlos Hernando Quintero Castro Michael Johan López López UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA INGENIERÍA EN CONTROL BOGOTÁ D.C. 2018
Transcript of Sistema de Direccionamiento de las Antenas para el...

Sistema de Direccionamiento de las Antenas para el Vehículo Estratosférico
Sabio Caldas
Carlos Hernando Quintero Castro Michael Johan López López
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
INGENIERÍA EN CONTROL
BOGOTÁ D.C.
2018

ii
Sistema de Direccionamiento de las Antenas para el Vehículo Estratosférico
Sabio Caldas
Carlos Hernando Quintero Castro Michael Johan López López
Trabajo de grado para optar al título profesional de: Ingeniero en Control
Director Ing. Esperanza Camargo Casallas
Trabajo de Investigación
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD TECNOLÓGICA
INGENIERÍA EN CONTROL
BOGOTÁ D.C.
2018

iii Nota de aceptación
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
__________________________________________________________________
_______________________________
Jurado 1
_______________________________
Jurado 2

iv Dedicatoria
A Dios por las bendiciones que ha puesto en mí caminar.
A mis padres por infundir mis principios éticos y morales, para no desfallecer y
siempre agregar los intentos necesarios para alcanzar mis metas.
A cada una de esas personas que me inculcaron el valor del aprendizaje, el estar
siempre con actitud positiva ante cualquier situación.
Carlos Hernando Quintero Castro

v Dedicatoria
A Dios por las bendiciones que ha puesto en mi caminar.
A mis padres por infundir mis principios éticos y morales, para no desfallecer y
siempre agregar los intentos necesarios para alcanzar mis metas.
A cada una de esas personas que me inculcaron el valor del aprendizaje, el estar
siempre con actitud positiva ante cualquier situación.
Michael Johan López López

vi Agradecimientos
Los autores expresan sus agradecimientos a:
Al grupo de investigación DIGITI de la Universidad Distrital Francisco José de
Caldas por permitir la utilización de sus espacios para la realización de las tareas de
implementación y pruebas correspondientes.
A la ingeniera Esperanza Camargo y a los ingenieros del tecnoparque nodo
cazucá por su constante dedicación en las asesorías que dieron paso al desarrollo del
módulo.

vii Resumen
El grupo de investigación DIGITI ha desarrollado durante los últimos 7 años varios
proyectos de investigación institucionalizados, entre sus líneas de investigación se
encuentra el diseño e implementación de vehículos estratosféricos, en la cual se
encuentra en desarrollo un proyecto de investigación. Este proyecto busca mejorar
funcionalmente los sistemas ya implementados e incluir los nuevos sistemas necesarios
para corregir las fallas presentadas en la primera versión del vehículo estratosférico.
El vehículo estratosférico se divide en distintos módulos los cuáles están siendo
desarrollados por estudiantes de ingeniería en control, telecomunicaciones y tecnología
en electrónica como proyecto de grado, el módulo que se desarrollará es el de la base
de las antenas, el cual busca realizar el seguimiento a el vehículo estratosférico durante
todo el recorrido apuntándolas hacia el lugar del horizonte donde se encuentra el
vehículo.
Existen algunas fuerzas externas que dificultan que el vehículo siga la trayectoria que
inició con respecto a la superficie terrestre. Debido a estas fuerzas varia la posición del
vehículo respecto a las antenas, causando la pérdida de la ubicación y señales del
dispositivo; por esta razón, es necesario un sistema de posicionamiento que mantenga
las antenas con la mejor orientación posible apuntando hacia el vehículo.
El objetivo principal de este proyecto es implementar dicho sistema automático que
permita direccionar la antena hacia el vehículo estratosférico, por medio de un
microcontrolador que triangule la posición de esta, ayudado por un módulo GPS.
Palabras Clave: sistema de posicionamiento, Azimut, microcontrolador, GPS.

viii Abstract
The DIGITI research group has developed several institutionalized research projects
during the last 7 years, among lines of research is the design and implementation of
stratoscopic vehicles, in which a research project is being developed. This project seeks
to improve the functionality of the systems already implemented and include the new
systems necessary to correct the failures presented in the first version of the
stratospheric vehicle.
The stratospheric vehicle is divided into several modules as well as engineering in
control, telecommunications and online technology as the degree project, the module
that develops at the base of the antennas, which seeks to track a stratospheric vehicle
during all the way aiming at the place of the horizon where the vehicle is.
There are some external forces that make it difficult for the vehicle to follow the path it
started with respect to the earth's surface. Because these forces vary the position of the
vehicle with respect to the antennas, causing the loss of the location and signals of the
device; For this reason, a positioning system is necessary to maintain the antennas with
the best possible orientation to point towards the vehicle.
The main objective of this project is to implement the automatic system that allows to
direct the antenna towards the stratospheric vehicle, by means of a microcontroller that
can be positioned by means of GPS.
Keywords: positioning system, Azimuth, microcontroller, GPS.

ix Tabla de Contenidos
Nota de aceptación ......................................................................................................... iii Dedicatoria ......................................................................................................................iv
Agradecimientos .............................................................................................................vi Resumen ........................................................................................................................ vii Abstract ......................................................................................................................... viii Tabla de Contenidos .......................................................................................................ix
Lista de figuras ................................................................................................................ x
Introducción ..................................................................................................................... 1
Planteamiento Del Problema ........................................................................................... 2
Justificación ..................................................................................................................... 3
Objetivos ......................................................................................................................... 4
General ........................................................................................................................... 4
Específicos. ..................................................................................................................... 4
Marco de referencia ........................................................................................................ 5
Estado del arte ................................................................................................................ 5
Marco Teórico ............................................................................................................... 10
GPS (Sistema de Posicionamiento Global) ................................................................... 10
Motor paso a paso......................................................................................................... 11
Driver tb6560 ................................................................................................................. 12
Atmega328 .................................................................................................................... 13
Navegación marítima y aérea. ...................................................................................... 14
Proyecciones cartográficas ........................................................................................... 16
Proyección de Mercator ................................................................................................ 16
Formula de haversine .................................................................................................... 17
Rumbo ........................................................................................................................... 18
Azimut ........................................................................................................................... 20
Contra-rumbo y Contra-azimut (Rumbo o azimut inverso) ...............¡Error! Marcador no definido. Coordenadas Geográficas. ........................................................................................... 20
Metodología .................................................................................................................. 24
Diseño de Software ....................................................................................................... 24
GPS ............................................................................................................................... 28
Motores de movimiento acimutal y levacion .................................................................. 30
Diseño mecánico ........................................................................................................... 35
Resultados .................................................................................................................... 46
Conclusiones ................................................................................................................. 50
Lista de referencias ....................................................................................................... 59
Anexo ............................................................................................................................ 61
Anexo 1: código ATMEGA ......................................................................................... 61

x Lista de figuras
Figura 1. Esquema rutas de los 24 satélites del programa NAVSTAR [7] ....................... 11 Figura 2. Triangulación GPS [8] .............................................................................................. 11 Figura 3. Motor paso a paso .................................................................................................... 12
Figura 4. Tarjeta TB6560 .......................................................................................................... 13 Figura 5. Microcontrolador ATMEGA328 ............................................................................... 14
Figura 6. Comparación de rumbo vs azimut .......................................................................... 19 Figura 7. Longitud y latitud [12] ................................................................................................ 21
Figura 8. Teorema de Girad ..................................................................................................... 23 Figura 9. Áreas ........................................................................................................................... 23 Figura 10. Trigonometría esférica ........................................................................................... 24
Figura 9. Diagrama de variables ............................................................................................ 25
Figura 9. Diagrama de flujo del código .................................................................................. 26
Figura 10. Diagrama de flujo del código ................................................................................ 27 Figura 11. Modulo GPS y ATMEGA328 ................................................................................. 29
Figura 12. Motor paso a paso SY57STH76-2804A .............................................................. 31 Figura 14. Pistas circuito impreso ........................................................................................... 33 Figura 15. Vista 3d proteus ...................................................................................................... 34
Figura 16. Pcb montada ............................................................................................................ 34 Figura 17. Tripode empleado en la estructura ..................................................................... 35
Figura 18. Caja usada en la estructura ................................................................................. 36 Figura 19. Exoesqueleto diseñado para la caja ................................................................... 36
Figura 20. Caja completa de la estructura ............................................................................ 37 Figura 21. Foto caja completa de la estructura .................................................................... 37
Figura 22. Base para motor ...................................................................................................... 38
Figura 23. Foto Base para motor ............................................................................................. 38 Figura 24. Chumacera ............................................................................................................... 39
Figura 25. Eje para base de motor .......................................................................................... 39 Figura 26. Base para motor acoplad ....................................................................................... 39
Figura 27. Impresión de piñones ............................................................................................. 40 Figura 28. Eje para perfil de antenas ..................................................................................... 41 Figura 29. Engranajes del eje superior .................................................................................. 41
Figura 30. Perfil de aluminio para sostener las antenas .................................................... 42 Figura 31. Perfil de aluminio simulado .................................................................................. 42
Figura 32. Acople diseñado para sostener las antenas ....................................................... 42 Figura 33. Tornillo usado para los acoples de las antenas ................................................ 43
Figura 34. Acople de engranajes inferior .............................................................................. 43
Figura 35. Vista superior caja previo montaje eje de elevación ......................................... 44 Figura 36. Piñón movimiento azimut ....................................................................................... 44
Figura 37. Eje movimiento azimutal ........................................................................................ 45 Figura 38. Estructura final ........................................................................................................ 45
Figura 38. Estructura final ........................................................................................................ 46 ....................................................................................................................................................... 46
Figura 38. Estructura final ........................................................................................................ 46
Figura 38. Estructura final ........................................................................................................ 47

xi Figura 38. Estructura final ..................................................................................................... 47
Figura 38. Estructura final ........................................................................................................ 48 Figura 38. Estructura final ........................................................................................................ 48
Figura 38. Estructura final ........................................................................................................ 49 Figura 38. Estructura redimensionada .................................................................................. 49

1
Introducción
Se planteó el proyecto desde la necesidad de mantener la comunicación
constante con el vehículo estratosférico y la base de operaciones ubicada en
tierra, la solución realizada fue un modelo tipo “tracker” el cual posicionar las
antenas en dirección al vehículo todo el tiempo, el desarrollo empezó por la
realización del algoritmo que realizara la triangulación del vehículo y la base en
tierra, se optó por realizar este cálculo mediante las datos del GPS que era
entregado por el vehículo y un GPS que se mantendría en tierra, esta fue la mejor
solución encontrada debido a que las distancias serían muy grandes durante el
trayecto, mediante esto sabemos la distancia y dirección a la cual se encuentra el
vehículo, una vez realizado el programa se diseñó la base basados en los
diferentes proyectos los cuales encontramos en la investigación previa, el proyecto
final fue una base accesible y de bajo costo que funcionaba de manera correcta.
En los siguientes capítulos se vera de manera más detallada la justificación
del proyecto, trataremos los objetivos que se buscaban realizar, observaremos los
proyectos de los cuales se tomaron las bases para la realización de trabajo y la
explicación teórica-matemática de la solución dada, por último, se observara el
diseño de software y el modelo mecánico implementado y los resultados
obtenidos.

2
Planteamiento Del Problema
El vehículo estratosférico debe seguir una trayectoria a través de la
atmósfera, hasta llegar a la capa estratosférica, a lo largo de este recorrido se verá
enfrentado a fuerzas naturales de la dinámica atmosférica como la temperatura,
presión, humedad y precipitaciones las cuales tienen un mayor efecto a medida
que aumenta la altura [1].
Si bien es posible corregir en cierta medida algunos de los efectos
provocados por la dinámica atmosférica sobre el globo a lo largo de su trayectoria,
es inevitable que sufra desviaciones en el plano horizontal a medida que asciende,
es decir que el vehículo no ascenderá en línea recta por lo cual se perderá la línea
de visión y de comunicación estable entre las antenas y la estación en tierra, lo
que significaría una posible pérdida de datos o del vehículo en su totalidad. Por
lo anterior se hace necesaria la implementación de un sistema capaz de dar
seguimiento permanente a la posición del vehículo de tal manera que se asegure
comunicación estable y sin interrupciones entre este y la estación en tierra.

3
Justificación
Colombia es un país que en términos de investigación aeroespacial tiene
un atraso de casi 50 años con respecto a países con gran relevancia en este
campo, con la realización del proyecto se busca fomentar la investigación y
generar nuevas tecnologías que permitan realizar avances significativos en esta
área, además incentivar a las futuras generaciones a realizar investigaciones y
lograr ubicar a la universidad Distrital como pionero a nivel de investigación
aeroespacial en Colombia. Este proyecto busca cumplir el objetivo principal del
acuerdo de Paris para evitar la pérdida de información del lanzamiento de la
sonda, todo esto en el marco del grupo de investigación DIGITI.
El vehículo utiliza una antena como receptor, ubicando así por telemetría,
el dispositivo. Como la antena debe apuntar al vehículo constantemente para no
perder la comunicación, se requiere un sistema que controle la antena mediante
la comparación de los datos del módulo GPS y el vehículo, se necesitara un
algoritmo el cual realice esta comparación y pueda controlar los motores
necesarios para la ubicación de la antena de manera precisa y apuntando al
vehículo.

4
Objetivos
General
Desarrollar un sistema para el seguimiento de la trayectoria del vehículo
estratosférico Sabio Caldas de tal manera que las antenas de comunicación en
tierra apunten de manera constante hacia este.
Específicos.
Desarrollar el algoritmo que triangule la posición del vehículo estratosférico
con la posición de la antena.
Controlar el movimiento de los motores de los ejes azimut y elevación de las
antenas.
Rediseñar y acoplar el soporte mecánico del sistema de direccionamiento.

5
Marco de referencia
Estado del arte
Una de las principales necesidades del vehículo estratosférico es mantener
una comunicación eficiente mientras se encuentra en movimiento para asegurar
la toma de datos. Para cumplir con esta necesidad se implementa un sistema de
seguimiento basado en la posición actual del vehículo estratosférico la cual es
proporcionada por un GPS y triangulada para generar el movimiento de las
antenas con un sistema de motores y mantener las antenas siempre dirigidas a la
posición en tiempo real del vehículo estratosférico.
La principal función de un sistema de apuntamiento de antena es poder
mover la antena en dos ejes llamados azimut y elevación. El rango de grados del
azimut son de 0 a 360 y de la elevación son de 0 a 90 [2]. Los valores de estos
ángulos dependen de la posición geográfica de la antena (longitud y latitud) y de
la ubicación del vehículo [3]. Para determinar la posición del vehículo se deben
tener en cuenta tres parámetros: la distancia entre el vehículo y la antena terrestre,
la elevación, y el azimut [4]. La elevación es el ángulo que hay que elevar para
ubicar el vehículo, en cambio, el azimut es la cantidad de grados que hay que girar
la base de la antena en el sentido de las manecillas del reloj con relación al norte
geográfico de la Tierra hasta encontrar el vehículo [3].
Para desarrollar el algoritmo se deben tener estos 3 parámetros esenciales:
para hallar el ángulo de elevación y la distancia entre la antena y el vehículo, se
requiere usar un módulo GPS para conocer la posición en la que se encuentra la

6
antena terrestre y compararla con la ubicación del vehículo, para el ángulo de
azimut se requiere un magnetómetro para conocer el norte geográfico, teniendo en
cuenta la diferencia entre el norte magnético.
Una de las aplicaciones del sistema de apuntamiento es el DE-LINK, es un
sistema de apuntamiento de antena para globos estratosféricos. En esta
investigación se utiliza una combinación de receptores GPS, acelerómetros y
circuitos magneto-resistivos para determinar la posición absoluta del globo en
tiempo real, y dos motores de corriente continua para apuntar la antena en las
direcciones de azimut y elevación para compensar los movimientos de la góndola.
Los motores son controlados por PWM para mejorar la eficiencia, ya que los
motores raramente corren a toda velocidad. Para poder controlar la antena con un
controlador PID utilizaron sensores de ángulo absoluto para proporcionar el
conocimiento inmediato de la dirección de la antena. Los sensores proporcionan
una salida de tensión continua que es lineal con el ángulo de rotación del sensor
[5].
El sistema de apuntamiento se puede aplicar a diferentes áreas y poder
saber la ubicación de un objeto deseado en tiempo real, siempre y cuando se
tengan los 3 parámetros básicos para hacer el cálculo de la ubicación, con este
sistema su pueden saber la ubicación en tiempo real de satélites para sistemas
TDMA, la posición del satélite se determina normalmente en un sistema cartesiano
geocéntrico donde 1) el eje X es la intersección del plano ecuatorial (0 grados
latitud) y el plano meridiano de Greenwich (0 grados longitud) y está orientado
lejos del centro de la Tierra, 2) el eje Z es el eje polar orientado de sur a norte, y 3) el eje Y completa el diestro del sistema de coordenadas cartesianas [4].

7
Además, para calcular las coordenadas del satélite, se deben agregar otro
sistema de coordenadas que indique la distancia con respecto a la estación
terrestre.
En esta investigación se dedujo la siguiente ecuación para las coordenadas
del satélite:
[
𝑋𝑆
𝑌𝑆
𝑍𝑆
] = 𝑑𝑅 [
cos 𝜃𝐿 sin 𝜃𝑙 sen 𝜃𝐿 cos 𝜃𝐿 cos 𝜃𝑙
−sin 𝜃𝐿 sin 𝜃𝑙 cos 𝜃𝐿 −sin 𝜃𝐿 cos 𝜃𝑙
− cos 𝜃𝑙 0 sin 𝜃𝑙
] × [cos 𝐸 cos 𝐴′
cos 𝐸 sin 𝐴′
sin 𝐸
]
+ [
𝑅𝑒 cos 𝜃𝐿 cos 𝜃𝑙
−𝑅𝑒sin 𝜃𝐿 cos 𝜃𝑙
𝑅𝑒 sin 𝜃𝑙
] (1)
Donde 𝜃𝑙, es la referencia de latitud de la estación, 𝜃𝑙 > 0 para una latitud
norte y 𝜃𝑙 < 0 para una latitud sur, 𝜃𝐿 es la referencia de longitud, 𝜃𝐿 > 0 para una
longitud oeste, y 𝜃𝐿 < 0 para una longitud este y 𝑅𝑒 es el radio de la Tierra. El
ángulo de azimut está dado por lo siguiente: Hemisferio Norte: La estación está al
oeste: A=180-A’, la estación está al este: A=180+A’; y el hemisferio sur: La
estación está al oeste: A=A’, la estación está al este: A=360-A’ [4].
Los sistemas de apuntamiento, además de los datos que toman para saber
la ubicación del objeto, también necesitan un montaje electromecánico,
convirtiéndolo en un sistema integrado cuya función principal es señalar
automáticamente el objetivo moviendo la antena en dos ejes, el de azimut y el de
elevación [3], los requerimientos principales del sistema son: El ordenador de
control de vuelo adquiere el GPS y los datos de los sensores, y los pone a

8
disposición de la unidad digital de control; basado en los datos de longitud y latitud
recibidos, calcular el ángulo de apuntamiento; controlar la posición de la antena
en varios motos como manual y programable; comunicarse con la antena para el
intercambio de datos por telemetría [3].
Lo importante del APS es el algoritmo de control, este se lleva a cabo
mediante el uso de un controlador proporcional, Para el algoritmo del
posicionamiento se tiene en cuenta: Obtener la latitud, longitud de la antena, los
cuales son ubicaciones fijas como coordenadas de referencia; adquirir la latitud y
longitud del vehículo de aire que es variable para el cálculo; obtener la diferencia
de latitud y longitud para el algoritmo de aproximación; obtener la posición X y la
posición Y; calcular el rodamiento utilizando la posición X y la posición Y que
ayudará el movimiento del azimut; usar el rango y la altitud para calcular el ángulo
para el movimiento de elevación; estos dos parámetros deben mantener la escala
dependiendo de la dinámica del sistema mecánico [3]. En resumen, un APS es un
sistema electromecánico que requiere de módulos, sensores y algoritmos para su
implementación, el cual se basa en el control de los ejes de azimut y elevación
dependiendo de la posición de la antena y del vehículo estratosférico. Para la
posición de la antena se usa un GPS y para la posición del vehículo se obtienen
los datos que obtiene la antena por telemetría; para el control de dichos ejes se
obtienen los datos de latitud, longitud y altitud y se comparan entre sí para calcular
los ángulos en los cuáles debe moverse la antena para apuntar hacia el vehículo,
cuyo movimiento es generado por motores.

9
La tecnología del seguidor también se puede implementar en el área de las
energías renovables, en este caso, la de energía solar haciendo que los paneles
sigan el sol y de esta manera se pierda en lo mínimo la luz solar como lo es el
seguidor solar MS Tracker 10 diseñado por la empresa MECASOLAR. El seguidor
solar de 2 ejes es un equipo electromecánico que en su parte superior lleva fijados
los módulos fotovoltaicos y que consigue que la insolación sobre los mismos sea
máxima; toda esta estructura se mueve de Este a Oeste sobre un eje que puede
girar 240º (seguimiento azimutal) y un segundo eje con movimiento de inclinación
desde los 60º hasta la posición horizontal. Gracias a estos equipos, los paneles
se orientan de forma que siempre están dirigidos hacia el sol y así aumenta su
rendimiento. Buscando el objetivo de maximizar la producción de energía de
origen fotovoltaico optimizando los recursos que brinda el Sol, MECASOLAR ha
diseñado y fabricado el seguidor solar a dos ejes, azimutal y en altura, MS
TRACKER en sus dos versiones MS TRACKER 10 y MS TRACKER 10+, el
sistema de seguimiento a dos ejes se realiza mediante programación astronómica,
el autómata incorporado controla el accionamiento de los moto reductores
haciendo que el MS TRACKER siga la trayectoria del sol desde el amanecer hasta
que anochece, y así consigue orientación e inclinación óptima respecto al sol
durante todo el día, aprovechando al máximo la totalidad de la radiación solar
diaria que reciben los paneles. De esta manera, se ofrecen unos incrementos en
el rendimiento de las instalaciones con MS TRACKER, respecto a las instalaciones
sobre estructuras fijas superior al 35%, pudiendo alcanzar hasta el

10
45% en algunas regiones de España. Este incremento de la producción hace que
se maximice la rentabilidad de la inversión, debido a la obtención de producciones
más altas, y reduce la inversión en paneles solares, elemento más delicado y
costoso de la instalación y que tanto escasea en estos momentos, obteniéndose
pay-back más reducidos y ROI más altos de la inversión. [6]
Marco Teórico
Para el desarrollo de este proyecto se requieren una serie de conceptos
para el óptimo funcionamiento del dispositivo que varían desde principios hasta
aparatos electrónicos para su implementación.
GPS (Sistema de Posicionamiento Global)
GPS es un sistema que tiene como objetivo la determinación de las
coordenadas espaciales de puntos respecto de un sistema de referencia mundial.
Los puntos pueden estar ubicados en cualquier lugar del planeta, pueden
permanecer estáticos o en movimiento y las observaciones pueden realizarse en
cualquier momento del día. Para la obtención de coordenadas el sistema se basa
en la determinación simultánea de las distancias a tres satélites (como mínimo)
de coordenadas conocidas. Estas distancias se obtienen a partir de las señales
emitidas por los satélites, las que son recibidas por receptores especialmente
diseñados. Las coordenadas de los satélites son provistas al receptor por el
sistema [7]

11
Figura 1. Esquema rutas de los 24 satélites del programa NAVSTAR [7]
Figura 2. Triangulación GPS [8]
Motor paso a paso
El motor paso a paso conocido también como motor de pasos es un
dispositivo electromecánico que convierte una serie de impulsos eléctricos en
desplazamientos angulares discretos, lo que significa que es capaz de girar una
cantidad de grados (paso o medio paso) dependiendo de sus entradas de control.

12
El motor paso a paso se comporta de la misma manera que un conversor digital-
analógico (D/A) y puede ser gobernado por impulsos procedentes de sistemas
digitales. Este motor presenta las ventajas de tener precisión y repetitividad en
cuanto al posicionamiento.
Figura 3. Motor paso a paso
Driver tb6560
Este controlador de motores paso a paso es ajustable/regulable permitiendo
satisfacer la necesidad del usuario dependiendo de la aplicación a llevar a cabo, es
de un uso sencillo, usa acoplamiento óptico mediando el 6N137 de alta velocidad
para garantizar que esta no influya en pérdidas en el control de pasos que el motor
proporciona. El mismo módulo tiene impreso sobre su board instrucciones de uso
para llevar a cabo conexiones de la manera adecuadamente. Trae consigo un
disipador de calor el cual permite que el módulo se mantenga a una temperatura

13
adecuada y el funcionamiento del mismo no se vea afectado, es implementado en
máquinas de grabado, máquinas de SMT y otros equipos, pero hay que tener en
cuenta que no tiene ningún circuito de protección por lo que se debe tener mucho
cuidado al usar, ya que de lo contrario el chip TB6560 podría llegar a quemarse.
Figura 4. Tarjeta TB6560
Atmega328
El Atmega328 AVR 8-bit es un Circuito integrado de alto rendimiento que está
basado un microcontrolador RISC, combinando 32 KB ISP flash una memoria con
la capacidad de leer-mientras-escribe, 1 KB de memoria EEPROM, 2 KB de SRAM,
23 líneas de E/S de propósito general, 32 registros de proceso general, tres
temporizadores flexibles/contadores con modo de comparación, interrupciones
internas y externas, programador de modo USART, una interfaz serial orientada a

14
byte de 2 cables, SPI puerto serial, 6-canales 10-bit Conversor A/D (canales en
TQFP y QFN/MLF packages), "watchdog timer" programable con oscilador interno,
y cinco modos de ahorro de energía seleccionables por software. El dispositivo
opera entre 1.8 y 5.5 voltios. Por medio de la ejecución de poderosas instrucciones
en un solo ciclo de reloj, el dispositivo alcanza una respuesta de 1 MIPS,
balanceando consumo de energía y velocidad de proceso.
Figura 5. Microcontrolador ATMEGA328
Navegación marítima y aérea.
La navegación marítima es el arte y la ciencia de conducir una embarcación
desde una situación de salida (zarpado) hasta otra de llegada, eficientemente y con
responsabilidad. Es arte por la destreza que debe tener el navegante para sortear
los peligros de la navegación, y es ciencia porque se basa en conocimientos físicos,
matemáticos, oceanográficos, cartográficos, astronómicos, etc. La navegación
puede ser superficial o submarina.

15
La navegación aérea es el conjunto de técnicas y procedimientos que
permiten pilotar eficientemente una aeronave a su lugar de destino, asegurando la
integridad de los tripulantes, pasajeros, y de los que están en tierra. La navegación
aérea se basa en la observación del cielo, del terreno, y de los datos aportados por
los instrumentos de vuelo.
La navegación aérea se divide en dos tipos (dependiendo si la aeronave
necesita de instalaciones exteriores para poder guiarse): Navegación aérea
autónoma y Navegación aérea no autónoma.
La navegación aérea autónoma es aquella que no necesita de ninguna
infraestructura o información exterior para poder completar con éxito el vuelo. A su
vez, ésta se divide en:
Navegación observada: se basa en la observación directa de las referencias
necesarias en el terreno por parte del navegante o piloto, con tal de conocer la
posición de la aeronave.
Navegación a estima: el navegante o piloto estima la posición actual,
conocidas la dirección y la velocidad respecto al terreno.
Navegación por fijación de la posición: ésta a su vez se subdivide en
navegación aérea astronómica, navegación aérea Doppler, navegación aérea
inercial (INS).
La navegación aérea no autónoma, al contrario, sí necesita de instalaciones
exteriores para poder realizar el vuelo, ya que por sí sola la aeronave no es capaz
de navegar. Las instalaciones necesarias para su guiado durante el vuelo reciben el
nombre de ayudas a la navegación. Estas ayudas se pueden dividir a su vez

16
dependiendo del tipo de información que transmiten, así como del canal a través del
cual lo hacen. Así, las radioayudas pueden ser:
Ayudas visuales al aterrizaje: son instalaciones que proporcionan señales
visuales durante la etapa de aterrizaje de la aeronave.
Radioayudas: Son señales radioeléctricas recibidas a bordo, generalmente
emitidas en instalaciones terrestres.
Navegación por satélite.
Proyecciones cartográficas
La proyección cartográfica o proyección geográfica es un sistema de
representación gráfica que establece una relación ordenada entre los puntos de la
superficie curva de la Tierra y los de una superficie plana (mapa). Estos puntos se
localizan auxiliándose en una red de meridianos y paralelos, en forma de malla. La
única forma de evitar las distorsiones de esta proyección sería usando un mapa
esférico.
En un sistema de coordenadas proyectadas, los puntos se identifican por las
coordenadas cartesianas (x e y) en una malla cuyo origen depende de los casos.
Este tipo de coordenadas se obtienen matemáticamente a partir de las coordenadas
geográficas (longitud y latitud), que no son proyectadas.
Proyección de Mercator
La proyección de Mercator fue ideada por Gerardus Mercator en 1569. La
característica más importante de esta proyección consiste en que el sistema de

17
meridianos y paralelos se transforma en un sistema de coordenada del tipo
cartesiano, líneas rectas que se cortan perpendicularmente.
Los meridianos son líneas rectas paralelas entre sí dispuestas verticalmente
a la misma distancia unos de otros y los paralelos rectas paralelas entre sí
dispuestas horizontalmente, pero cuyas distancias aumentan al acercarnos a los
polos. Por esa razón no suele emplearse esta proyección en mapas de latitudes
extremas.
La proyección de Mercator, es un tipo de proyección cilindrica, que mantiene
paralelos el eje terrestre y el del cilindro, permite representar toda la superficie
terrestre y la deformación es mínima sólo en la region ecuatorial.
Es una proyección muy útil para la navegación, pues permite trazar rumbos
como rectas que cortan a los meridianos con igual ángulo.
Otra proyección basada en la de Mercator es la UTM, Universal Transverse
Mercator, que, en vez de proyectar el globo terráqueo en un cilindro tangente al
ecuador, se proyecta en un cilindro que es tangente a un meridiano de la esfera
terrestre.
Formula de haversine
Calcular la distancia entre dos puntos sobre un plano podría llegar a ser
relativamente sencillo. Sin embargo, cuando estos dos puntos los ubicamos sobre
la esfera terrestre, es decir, lo que pretendemos es calcular la distancia lineal entre
dos posiciones dadas (latitud + longitud), la cosa se complica.

18
Básicamente se complica porque en el cálculo de la distancia entre ambas
posiciones debemos contemplar la curvatura terrestre. Es aquí donde entra en
escena la Fórmula del Haversine.
Sin entrar en demasiados detalles en términos matemáticos, la Fórmula del
Haversine es:
𝑅 = 𝑅𝑎𝑑𝑖𝑜 𝑑𝑒 𝑙𝑎 𝑡𝑖𝑒𝑟𝑟𝑎
𝛥𝐿𝑎𝑡 = 𝐿𝑎𝑡2 − 𝐿𝑎𝑡1
𝛥𝐿𝑜𝑛𝑔 = 𝐿𝑜𝑛𝑔2 − 𝐿𝑜𝑛𝑔1
𝑎 = 𝑠𝑖𝑛2 (𝛥𝐿𝑎𝑡
2) + cos(𝐿𝑎𝑡1) ∗ cos(𝐿𝑎𝑡2) ∗ 𝑠𝑖𝑛2(𝛥𝑙𝑜𝑛𝑔/2)
𝑐 = 2 ∗ 𝑎𝑇𝑎𝑛2(√𝑎, √(1 − 𝑎))
𝑑 = 𝑅. 𝑐
Para utilizar la Fórmula del Haversine necesitamos, además de las dos
posiciones (lat + lon), el radio de la Tierra. Este valor es relativo a la latitud, pues al
no ser la Tierra perfectamente redonda, el valor del radio ecuatorial es de 6378 km
mientras que el polar es de 6357 km. El radio equivolumen es de 6371 km. Para este
post utilizaremos el valor del radio ecuatorial.
Por tanto, lo primero que haremos es representar la clase Posición, que no es más
que una clase con un par de propiedades relativas a la longitud y latitud.
Rumbo
El rumbo de una línea es el ángulo horizontal agudo (<90°) que forma con un
meridiano de referencia, generalmente se toma como tal una línea Norte-Sur que

19
puede estar definida por el N geográfico o el N magnético (si no se dispone de
información sobre ninguno de los dos se suele trabajar con un meridiano, o línea de
Norte arbitraria).
Como se observa en la figura, los rumbos se miden desde el Norte (línea ON)
o desde el Sur (línea OS), en el sentido de las manecillas del reloj si la línea a la que
se le desea conocer el rumbo se encuentra sobre el cuadrante NOE o el SOW; o en
el sentido contrario si corresponde al cuadrante NOW o al SOE.
Como el ángulo que se mide en los rumbos es menor que 90° debe
especificarse a qué cuadrante corresponde cada rumbo.
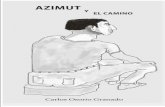
Figura 6. Comparación de rumbo vs azimut
Por ejemplo, en la figura las líneas mostradas tienen los siguientes rumbos:
Línea RUMBO
OA N30°E
OB S30°E
OC S60°W

20
OD N45°W
Como se puede observar en la notación del rumbo se escribe primero la
componente N o S del cuadrante, seguida de la amplitud del ángulo y por último la
componente E o W.
Azimut
El azimut de una línea es el ángulo horizontal medido en el sentido de las
manecillas del reloj a partir de un meridiano de referencia. Lo más usual es medir el
azimut desde el Norte (sea verdadero, magnético o arbitrario), pero a veces se usa el
Sur como referencia.
Los azimutes varían desde 0° hasta 360° y no se requiere indicar el cuadrante
que ocupa la línea observada. Para el caso de la figura, las mismas líneas para las
que se había encontrado el rumbo tienen el siguiente azimut:
Línea RUMBO
OA 30°
OB 150°
OC 240°
OD 315°
Coordenadas Geográficas.
Las coordenadas geográficas se crearon como una manera de conocer la
ubicación de un punto en el globo terráqueo, para esto se tomó el eje central del

21
planeta como punto el referencia principal separando el planeta en 2 cuadrantes,
la longitud toma valores de 0º a 180º y es calculado como el Angulo desde 0º
hasta el punto que se quiere conocer, tomando como 0º el meridiano de
Greenwich como se ve en la siguiente figura, en los extremos del eje se ubica el
polo norte y sur respectivamente [12].
Sucede lo mismo con respecto a la latitud, a el eje se le trazo
perpendicularmente otra división que la atravesaba por la mitad conocido como el
ecuador, este dividió el planeta en 2 partes conocidas como hemisferio norte y
sur, la latitud toma valores desde 0º a 90º siendo 0º el ecuador y 90º los polos
respectivamente [12], el cálculo de la latitud se realiza de manera similar a la
longitud como se observa en la siguiente figura.
Figura 7. Longitud y latitud [12]
Geometría esférica
La geometría esférica es la geometría de la superficie bidimensional de
una esfera. Es un ejemplo de geometría no euclídea.

22
En geometría plana los conceptos básicos son el punto y la línea. En la
esfera, los puntos están definidos en el sentido usual. Los equivalentes de las
líneas no están definidos en el sentido usual de la "línea recta" sino en el sentido
de "las trayectorias más cortas entre los puntos", lo cual es llamado geodésico. En
la esfera los geodésicos son los grandes círculos, así que los otros conceptos
geométricos son definidos como en la geometría plana, pero con las líneas
sustituidas por los grandes círculos. Así, en geometría esférica los ángulos están
definidos entre los grandes círculos, resultando en una trigonometría esférica que
diferencie de la trigonometría ordinaria en muchos aspectos (por ejemplo, la suma
de los ángulos interiores de un triángulo excede los 180 grados).
Triángulos Los triángulos esféricos están formados por segmentos de
líneas esféricas. Dos triángulos esféricos son congruentes si tienen lados y
ángulos correspondientes iguales. Los criterios de congruencia LLL, LAL, ALA
funcionan igual en la esfera que en el plano.
Teorema de Girard (1632) Los ángulos internos de un triángulo esférico Δ
suman π + Área Δ Corolario: Dos triángulos esféricos (no degenerados) con los
mismos ángulos son congruentes.
El área de la esfera es 4π, por lo tanto, el área de un gajo de la esfera
determinado por un ángulo (medido en radianes) es 2 veces el ángulo.

23
Figura 8. Teorema de Girad
Figura 9. Áreas
Los dos gajos con ángulo A, los dos gajos con ángulo B y dos gajos con
ángulo C juntos cubren a toda la esfera, cubriendo al triangulo Δ y a su antípoda 3
veces. Por lo tanto, si sumamos las áreas de todos los gajos obtenemos el área de
la esfera más cuatro veces el área del triángulo:
4𝐴 + 4𝐵 + 4𝐶 = 4𝜋 + 4𝐴𝑟𝑒𝑎𝛥
Trigonometría esférica
Ley esférica de los senos:

24
sin 𝑎
sin 𝐴+
sin 𝑏
sin 𝐵+
sin 𝑐
sin 𝐶
Ley esférica de los cosenos:
cos 𝑎 = cos 𝑏 ∗ cos 𝑐 + sin 𝑏 ∗ sin 𝑐 ∗ cos 𝐴
Figura 10. Trigonometría esférica
Metodología
La metodología consta del diseño y desarrollo de la base mecánica
necesaria, basada en simulación con el software SolidWorks para el
apuntamiento hacia el vehículo de la manera más óptima, también se realizó el
desarrollo de hardware basada en circuitos de potencia y simulación en Proteus,
realizado estas dos partes se acoplo el software y la parte mecánica dando
solución a los problemas que se presentaran al momento de realizar la unión de
las partes.
Diseño de Software
Para realizar un diseño adecuado para el correcto funcionamiento del
sistema, se empleó el siguiente diagrama, el cual da a entender las variables o datos
necesarios para el direccionamiento de la antena, en las cuales se identificaron las
señales de entrada y salida del sistema.

25
Figura 11. Diagrama de variables
Microcontrolador
Módulo GPS
Motor del eje
Elevación
Motor del eje
Azimut
Fuente de
alimentación
GPS Vehículo

26
Figura 12. Diagrama de flujo del código

27
Figura 13. Diagrama de flujo del código

28
Luego de plantear la idea principal, fue escoger microcontrolador que cumpla
con los requisitos necesarios para adaptar el GPS y los motores paso a paso, de
bajo costo y realizar código mediante software libre, en este caso, el IDE de arduino
para programar el microcontrolador ATMEGA328.
Se descargó el software correspondiente Arduino IDE de la página de la
entidad y se empezaron a realizar una serie de pruebas para implementar los
módulos con la tarjeta. Para descargar el programa en la tarjeta es necesario un
cable USB tipo A/B.
GPS
Para poder direccionar la antena hacia el vehículo estratosférico Sabio
Caldas, es necesario conocer la ubicación de la estación en este caso la base
mecánica que soportara la antena, para ello se utilizó el módulo en su modelo GY-
GPS6MV2 viene con un módulo de serie U-Blox NEO 6M equipado con una
EEPROM, un indicador LED y una antena de cerámica. Posee los pines Vcc, Rx,
Tx y Gnd, por el cual se puede conectar a la tarjera mediante una interfaz serial y
el voltaje de operación es de 5V.

29
Figura 14. Modulo GPS y ATMEGA328
Los datos que se reciben en el módulo GPS siguen el protocolo NMEA
(National Marine Electronics Asociation), las cuales son sentencias estándares
para la recepción de datos GPS. Una de ellas y la más usada son las sentencias
$GPRMC, las cuales tienen la siguiente estructura:
$GPRMC,123519, A,4807.038, N,01131.000, E,022.4,084.4,230394,003.1, W*6A
Donde:
RMC
Sentencia mínima recomendada
123519
Representa la hora GMT (12:35:19)
A
Estado A=Activo o V=Vacío
4807.038,N
Representa latitud (48°07.038’) Norte
01131.000,E
Representa longitud (11°31.000') Este
022.4
Velocidad sobre el suelo en nudos
084.4
Angulo de orientación en grados
230394
Fecha – 23 de marzo de 1994
003.1,W
Variación Magnética
Para probar el módulo se descargó la librería TinyGPS para el GPS y se
usó la librería SoftwareSerial para comunicación serial, en primera instancia se
probó la comunicación serial con un computador, imprimiendo los valores en la
consola del software Arduino IDE.
#include <SoftwareSerial.h>
#include <TinyGPS.h>

30
En la cual se usan los siguientes comandos para invocar los valores
requeridos: longitud, latitud y altitud, guardándolas en variables internas.
gps. f_get_position(&lat, &lon); //obtiene latitud y longitud
alt = gps.f_altitude(); //obtiene altitud
Con estos datos es posible conocer la ubicación de la base para el
vehículo estratosférico Sabio Caldas.
Motores de movimiento acimutal y elevación
Estos motores son utilizados para mover de 0 a 360 grados de rotación en
el eje acimutal y de 0 a 90 grados en el eje de elevación respectivamente. Se
escogieron los motores paso a paso de referencia SY57STH76-2804A, los cuales
cuentan con las siguientes características:
- Ángulo por paso: 1.8°
- Numero de fases: 2
- Fuerza radial maxima: 70N
- Fuerza axial maxima: 15N
- Dimensiones: 40x40x20mm
- Tension nominal: 3.2V
- Corriente de fase: 2.8A - Peso: 1.05Kg - Torque mantnimiento: 189N.cm

31
Figura 15. Motor paso a paso SY57STH76-2804A
Para mover el motor y lograr apuntar el eje azimutal de la base, se debe
implementar la proyección geográfica de Mercator con la cual se obtiene el ángulo
al que esta la sonda con respecto a la estación en tierra, este ángulo corresponde
al valor con el cual se da la orden de rotar el eje hasta llegar a dicha posición. Y
se obtiene como se indica a continuación:
Para ello se implementa el siguiente código, definiendo pi como
3.141592654:
dlon=abs(lon1-lon2); //Diferencia entre longitudes base
vehículo
ang=log(tan(lat2/2+pi/4)/tan(lat1/2+pi/4)); //Diferencia entre ángulos
yaw=atan2(dlon,ang)*180/pi; //Dirección entre 2 puntos geográficos

32
El Angulo máximo de giro es 359 grados ya que en 360 grados se
chocaría con el sensor final de carrera encargado de marcar la posición 0
grados.
Para el cálculo del Angulo de elevación es necesario conocer las alturas de
la base y del vehículo, según los datos de los GPS, y la distancia entre los dos
puntos geográficos. Para ello se aplica la fórmula de Haversine, donde R es el
radio de la Tierra.
Luego, se realiza la conversión en grados y de ese valor obtenido se realiza
el movimiento del motor de la siguiente manera, teniendo en cuenta R=6378:
d=R*acos(cos(lat1)*cos(lat2)*cos(lon2-lon1)+sin(lat1)*sin(lat2));
dalt = alt2-alt1;
pitch=atan2(dalt/d)*180/pi;
pitch2=(int)pitch;
con lo anterior se obtiene el ángulo de rotación para el eje de elevación de 0 a 90
grados.
Diseño del circuito impreso
El circuito consiste en dos etapas de alimentación de 5V totalmente
independientes, una para suplir la energía requerida por los motores a través de
los drivers TB6560 la cual consiste en una configuración boost de corriente con dos
transistores npn de referencia 2n3055 en paralelo de tal manera que se obtenga
una mejor disipación de la potencia y otra para energizar el microcontrolador,
sensor GPS y señales lógicas de los sensores finales de carrera.

33
Figura 16. Diagrama esquemático
Figura 17. Pistas circuito impreso

34
Figura 18. Vista 3d proteus
Figura 19. Pcb montada

35
Diseño mecánico
Para el desarrollo de la estructura mecánica se utilizó la herramienta de diseño
SOLID WORKS además de recibir una asesoría mecánica en cuanto a diseño,
dimensionamiento, uso de materiales para la construcción de la estructura brindada
por los asesores de tecnoparque nodo cazucá
1. Base de la estructura
Para la base de la estructura se decidió comprar un trípode ya que el
diseño y construcción de la base era complicado y no se contaba con los
recursos necesarios para construirlo.
Figura 20. Tripode empleado en la estructura

36
2. Caja
Utilizamos una caja de paso como base para toda la parte electrónica, el tamaño
de la caja se eligió con base en el tamaño de la pcb.
Figura 21. Caja usada en la estructura
Para soportar la parte superior de la estructura la cual tiene un peso aproximado
de 7 kg, se diseñó en exoesqueleto para la caja en lámina de 1/8 para poder soportar
todo el peso en el.
Figura 22. Exoesqueleto diseñado para la caja

37
La caja con todos sus componentes internos quedaría así
Figura 23. Caja completa de la estructura
Figura 24. Foto caja completa de la estructura

38
3. Base de motor y antenas
Se diseñó una base para el motor la cual quedo a la medida y a la cual iban
añadidas las chumaceras que son las que permiten el movimiento
Figura 25. Base para motor
Figura 26. Foto Base para motor

39
Se diseñó un eje el cual se dimensiono con base en el diámetro del centro de
los rodamientos de las chumaceras los cuales eran de 12.7 mm
Figura 27. Chumacera
Figura 28. Eje para base de motor
Pasando del modelamiento a la construcción de los elementos se obtuvo el
siguiente resultado
Figura 29. Base para motor acoplad

40
Para el desarrollo de la base de las antenas se tomó en cuenta el tamaño de la
base del motor, se diseñó una pieza en forma de u y se le transmitió el movimiento del
motor por medio de 2 engranajes los cuales tienen una relación de 1 a 2 y fueron
impresos en impresora 3D.
Para el diseño de los engranajes se utilizó la herramienta SOLID WORKS en la
cual vienen los parámetros básicos de un engranaje, basta con ingresar la relación
deseada entre estos 2 y el tamaño se tomó de la relación que tendría con la estructura.
Figura 30. Impresión de piñones

41
Figura 31. Eje para perfil de antenas
El engranaje más grande se ajustó a la pieza con un diseño de pestañas y 2 tornillos
Figura 32. Engranajes del eje superior
Para sostener las antenas se utilizó un perfil de aluminio de 35 mm y se
diseñaron unas piezas las cuales se ajustaban a la forma del perfil.

42
Figura 33. Perfil de aluminio para sostener las antenas
Figura 34. Perfil de aluminio simulado
Figura 35. Acople diseñado para sostener las antenas
Los acoples tienen unos tornillos los cuales les permiten el ajuste al perfil de aluminio

43
Figura 36. Tornillo usado para los acoples de las antenas
El acople de la caja con la parte superior de la estructura se hizo por medio de
2 engranajes los cuales también fueron diseñados por medio de la herramienta
SOLID WORKS y con relación 1 a 2.
Figura 37. Acople de engranajes inferior

44
Figura 38. Vista superior caja previo montaje eje de elevación
Figura 38. Piñón movimiento azimut

45
Figura 40. Eje movimiento azimutal
4. Acople de la estructura
Luego de tener cada parte de la estructura la cual cosnta de 3 partes básicas
las cuales son, base, caja y eje de antenas, se acopló toda la estructura obteniendo
resultados satisfactorios en cuanto a ensamblaje y funcionamiento.
Figura 41. Estructura final

46
Resultados
Se logró hacer un diseño totalmente nuevo y dimensionado para el
tamaño de las antenas, este diseño se logró con asesoría de ingenieros
mecánicos sobre modelamiento, procedimiento y uso de recursos.
Se utilizó la herramienta solidworks para diseñar y simular la
funcionalidad de cada una de las piezas y llegar a una estructura final sólida y
funcional uniendo todas las piezas.
Se realizó el diseño de las piezas
Figura 42. Diseño base de motor
Figura 43. Diseño de caja

47
Figura 44. Diseño de engranaje 30 dientes
Figura 45. Diseño de engranaje 15 dientes

48
Figura 46. Eje de engranajes
Figura 47. Eje base de motor

49
Figura 48. Acople de antenas
Este fue el resultado de todo el proceso de modelado y construcción de las piezas:
Figura 49. Estructura redimensionada

50
Cuenta con un diseño totalmente nuevo además de tener la capacidad de
soportar hasta 3 antenas.
A partir de la estructura redimensionada y totalmente acoplada se realizan
Pruebas de movimientos controlados a una posición deseada en grados de0 a 360
en azimut y de 0 a 90 en elevación.
En el movimiento azimutal se realiza el posicionamiento del norte magnético
siendo este nuestro punto 0 y ordenando los movimientos a partir de este punto, al
llegar a esta posición se ubica nuevamente la brújula para comparar los grados
recorridos desde el punto 0 hasta el actual y comparando con la orden dada.
Como los datos de longitud, latitud y altura de la sonda son recibidos desde
el sistema de radio enlace el cual toma la señal de la antena de telemetría, segmenta
y trata los datos de tal manera que al entrar al puerto serie del microcontrolador
estén en punto flotante con seis decimales de acuerdo a los estándares NMEA,
procedemos a verficar el funcionamiento del algoritmo que triangula la señal entre
la sonda y la estación en tierra haciendo que las antenas apunten a posiciones
aleatorias generadas por contadores desde el microcontrolador de tal manera que
arroja el cálculo del Angulo que debe mover en azimut y en elevación de acuerdo a
los datos que tiene.

51
El segundo método que utilizamos para verificar los valores de angulo
resultante de los cálculos del microcontrolador es insertar por puerto serie valores
correspondientes a longitud, latitud y altura de lugares geográficamente visibles o
de los cuales se conoce una orientación, como por ejemplo Monserrate, aeropuerto
el dorado, torre Colpatria, municipios de Chia y Sibate, entre otros, y comparándolo
con el valor arrojado por la aplicación web https://www.igismap.com/map-
tool/bearing-angle.
Figura 50. Bearing Facultad tecnológica a Monserrate

52
Figura 51. Resultado cálculo azimut desde la facultad tecnológica a Monserrate en
terminal serie de arduino
Figura 52. Bearing facultadtecnologica a chia

53
Figura 53. Distancia facultad tecnológica a chia en google maps
Figura 54. Resultado calculo azimut, distancia y elevación (50000 m) desde facultad tecnológica a chia en terminal serie de arduino.

54
Figura 55. Bearing facultad desde facultad tecnológica a girardot

55
Figura 56. Distancia desde facultad tecnológica a girardot en google maps

56
Figura 57. Resultado calculo azimut, distancia y elevación(56000 m) desde facultad tecnológica a Girardot en terminal serie de arduino
La idea inicial era implementar el ajuste del punto cero del norte con un
magnetómetro digital, por esta razón la PCB diseñada cuenta con dos entradas
I2C para las dos versiones del HMC5883 pero no se implementó debido a que al
momento de hacer pruebas, el campo magnético generado por los motores altera
drásticamente la lectura como se puede apreciar en la figura 53;
Conclusiones
Los resultados obtenidos fueron los deseados, se logró construir un
prototipo de bajo costo, ideal para ser utilizado en futuros proyectos, ya sea para
el área de investigación, en el cual fue desarrollado o en cualquier otra área donde

57
su uso sea optimizable, cabe aclarar que existen muchos cambios aconsejados
para futuras mejoras los cuales serán expuestos de manera más extensa, cada
uno por separado.
Si se planea aumentar la capacidad, de tamaño y peso, puede llegar a ser
un problema los campos electromagnéticos generados por las antenas y los
motores de mayor tamaño, por lo que se recomienda generar un aislamiento de
los dispositivos que generen dichos campos o buscando otro modo del control del
plano azimutal.
Para contrarrestar las demoras para generadas por cálculos continuos en
cada ciclo del microcontrolador es necesario implementar funciones dedicadas a
la ejecución de dichos cálculos en posiciones de memoria por lo cual no se tarda
de más en la ejecución del algoritmo.
Uno de los problemas que se encontraron en el desarrollo del proyecto fue
al iniciar el día, la sincronización entre el modulo GPS UBLOX-6M para lograr
encontrar el mínimo de tres satélites con los cuales triangular la posición, se
determinó que esta demora de hasta una hora varia por condiciones del clima,
pero sobre todo por las características del mismo y se aconseja para proyectos
futuros de investigación utilizar otro modulo con mejores características.
Otro problema que se encontró durante el desarrollo del proyecto fue la
interferencia electromagnética presentada por los picos de corriente de los
motores al recibir orden de cambio de posición bruscos con respecto a la actual,
por lo cual es necesario aislar completamente las fuentes de alimentación de los
motores y el resto de componentes como sensores, microcontrolador, etc.

58
La base mecánica funciono de manera correcta, ya que se acoplo
correctamente a los servomotores con el piñón encargado del giro azimutal y su
movimiento no se vio forzado en ningún momento.

59
Lista de referencias
[1] D. Bullard and M. Peterson, “Basic Air Pollution Meteorology Student
Guidebook,” 1982. [Online]. Available:
http://nepis.epa.gov/Exe/ZyNET.exe/20011ROL.TXT?ZyActionD=ZyDocum
ent&Client=EPA&Index=1981+Thru+1985&Docs=&Query=&Time=&EndTi
me=&SearchMethod=1&TocRestrict=n&Toc=&TocEntry=&QField=&QField
Year=&QFieldMonth=&QFieldDay=&IntQFieldOp=0&ExtQFieldOp=0&Xml
Query=&.
[2] J. E. Díaz Espíndola, R. Ferro Escobar, and J. A. Mesa Lara,
“Direccionamiento automático de antenas en estaciones terrenas de
seguimiento a picosatelites,” Tecnura, vol. 17, no. 35, pp. 26–37, 2012.
[3] S. M. Sundari and S. D. Member, “Design of Antenna Pointing System
(APS)-its Control and Communication Challenges,” no. Iccc, pp. 490–495,
2013. [4] Virginia Polytechnic Institute and S. University, “Real Time Satellite Position
Determination for TDMA Systems,” no. 6, pp. 751–756, 1985.
[5] G. Johansson, J. Selinder, and K. Hyyppä, “DE-Link, an antenna pointing
system for stratospheric balloons,” Proc. IEEE Int. Conf. Electron. Circuits,
Syst., 2005.
[6] I. Release, S. Service, and S. Updates, “Global Positioning System
Directorate Systems Engineering and Itegration: Navstar GPS space

60
Segment/Navigation User Interface,” Is-Gps-200H, 2013. [7] UTFSM, “Utfsm diciembre 2003,” 2003. [Online]. Available:
http://www2.elo.utfsm.cl/~mineducagv/docs/ListaDetalladadeModulos/serv
os.pdf.
[8] L. Tierra, O. Geof, O. Magn, and S. Pablo, “Campo magnético de la Tierra
Radiaciones ionizantes naturales : Radiación cósmica,” pp. 8–10, 1998.
[9] M. J. Machado Buriticá, “DISEÑO E IMPLEMENTACIÓN DEL CONTROL
DE ESTABILIZACIÓN PARA UNA PLATAFORMA ALTAZIMUT PARA USO
EN FOTOGRAFÍA,” 2013.
[10] Polivirtual, “Rumbos y Azimuts.” [Online]. Available:
http://www.academico.cecyt7.ipn.mx/UTCV/uas/planimetria/menus/plan_u
2/unidad2/documentos/u2_t3_rumbos_azimuts.pdf. [11] S. Ibañez Asensio, H. Moreno Ramón, and J. M. Gisbert Blanquer,
Coordenadas Geográficas. 2009.
[12] J. M. Rocha Nuñez and E. Lara Hernandez, “Introducción a los sistemas de
control,” Univ. Autónoma Nuevo León - Fac. Ing. Mecánica Y Eléctrica, pp.
1–10, 2011. [13] Magnetic-Declination.com, “Find the magnetic declination at your location,”
2015. [Online]. Available: http://www.magnetic-declination.com/.
[14] http://www.matem.unam.mx/max/IGA/N9.pdf

61
Anexo
Anexo 1: código ATMEGA
#define rotazdir 8
#define rotazstep 9
#define roteldir 13
#define rotelstep 12
//Importa librerias necesarias
#include <Wire.h>//Libreria i2c
#include <TinyGPS++.h>//Liberria GPS
#include <SoftwareSerial.h>//Libereria otros puertos seriales
TinyGPSPlus gps;//Objeto GPS
static const int RXPin = 10, TXPin = 11; // asigna los pines del puerto serial adicional
static const uint32_t GPSBaud = 9600; // Asigna velocidad de la comunicacion con GPS
SoftwareSerial ss(RXPin, TXPin); //Asigna pines para counicacion con el GPS
float giro=0, grados, old_grados, diferencia=0, act_pos, mov, muestraangulo ;
float giro2=0, grados2, old_grados2, diferencia2=0, act_pos2, mov2;
double lat_base, lng_base, alt_base, latbrad, lngbrad, altbrad;
//variables simulacion longitud y latitud
float lng_sonda = -77.456321;
float lat_sonda = -1;
float alt_sonda = 2600;
int val;
///////////////////////////////////////////////////////////////////////////////
void setup() {
// Serial.begin(9600);
ss.begin(GPSBaud);//inicializa com Serial para GPS
pinMode(rotazdir, OUTPUT);
pinMode(rotazstep, OUTPUT);
pinMode(roteldir, OUTPUT);
pinMode(rotelstep, OUTPUT);
Serial.println("iniciando");
delay(500);
}
///////////////////////////////////////////////////////////////////////////////
void loop(){
while (ss.available() > 0)
if (gps.encode(ss.read()))
//Serial.print(F("Location: "));

62
if (gps.location.isValid()){
lat_base = (gps.location.lat());
lng_base = (gps.location.lng());
alt_base = (gps.altitude.meters());
latbrad = lat_base * (PI/180);
lngbrad = lng_base * (PI/180);
altbrad = alt_base * (PI/180);
}
else{
// Serial.print(F("INVALID"));
}
if (millis() > 5000 && gps.charsProcessed() < 10){
Serial.println(F("No GPS detected: check wiring."));
while(true);
}
//LONGITUD Y LATITUD
SIMULADA++++++++++++++++++++++++++++++++++++++++++++++++++++++++
+++++++
lat_sonda = lat_sonda + 0.1;
if (lat_sonda>=10){lat_sonda=-1;}
lng_sonda = lng_sonda + 0.1;
if (lng_sonda>=-71){lng_sonda=-77.456321;}
alt_sonda = alt_sonda + 1000;
if (alt_sonda>=40000){alt_sonda=2600;}
float latsrad = lat_sonda * (PI/180);
float lngsrad = lng_sonda * (PI/180);
float altsrad = alt_sonda * (PI/180);
//*****CALCULOS PARA EJE
AZIMUTAL**********************************************************
float dlon=(lngsrad - lngbrad); //Diferencia entre longitudes base-vehículo
if (abs(dlon) > PI){
if (dlon > 0.0){
dlon = -(2.0 * PI - dlon);
}else{
dlon = (2.0 * PI + dlon);
}
}
double ang=log(tan((PI/4)+(latsrad/2))/tan((PI/4)+(latbrad/2))); //Diferencia entre ángulos
float yaw=atan2(dlon,ang)*(180/PI); //Dirección entre 2 puntos geográficos convertido a
grados
float nyaw, inv_yaw, yawf;
if (yaw<0){

63
inv_yaw=map(yaw, 0, -180, -180, 0);
inv_yaw = -1*inv_yaw;
nyaw = 180+inv_yaw;
yawf = nyaw;
}else{
yawf = yaw;
}
if (yawf>359){yawf=359;}
//movimiento eje azimutal
diferencia = yawf - old_grados;// halla diferencia entre grados actuales y grados anteriores
act_pos= yawf + diferencia; // calcula posicion actual
mov = diferencia;
rotaz(mov, 0.05);
old_grados = yawf;
//******CALCULOS PARA eje elevacion
**********************************************************
int R=6378;
float d = R*acos(cos(latbrad)*cos(latsrad)*cos(lngsrad-lngbrad)+sin(latbrad)*sin(latsrad));
float dalt = abs(altbrad-altsrad);
float pitch=atan2(dalt,d)*180/PI;
//movimiento de motor elevacion
diferencia2 = pitch - old_grados2;// halla diferencia entre grados actuales y grados
anteriores
act_pos2= pitch + diferencia2; // calcula posicion actual
mov2 = diferencia2;
rotel(-1*mov2,0.01);
old_grados2 = pitch;
}
//FUNCION ROTACION AZIMUT
void rotaz(float deg, float speed){
int dir = (deg > 0)? HIGH:LOW;
digitalWrite(rotazdir,dir);
int steps = abs(deg)*(2/0.225);
float usDelay = (1/speed) * 70;
for(int i=0; i < steps; i++){
digitalWrite(rotazstep, HIGH);
delayMicroseconds(usDelay);
digitalWrite(rotazstep, LOW);
delayMicroseconds(usDelay);
}
}
//FUNCION ROTACION ELEVACION
void rotel(float deg, float speed){

64
int dir = (deg > 0)? HIGH:LOW;
digitalWrite(roteldir,dir);
int steps = abs(deg)*(2/0.9);
float usDelay = (1/speed) * 70;
for(int i=0; i < steps; i++){
digitalWrite(rotelstep, HIGH);
delayMicroseconds(usDelay);
digitalWrite(rotelstep, LOW);
delayMicroseconds(usDelay);
}
}

47