
Unidad 5 Vibraciones
52
UNIDAD 5 Principios pedagógicos respaldados Matices respaldados Recursos de apoyo Texto Referencias Duración estimada 8 horas VIBRACION DE MAQUINAS Resultado de Aprendizaje: Análisis de los diferentes tipos de Vibraciones y sus efectos sobre maquinas Aprender a aprender Aprender a hacer Aprender a Ser y Bien Ser Mejora Continua Espíritu Emprendedor Vinculación Profesional y Social J. P. Den Hartog Mecánica de las Vibraciones, McGraw-Hill, 1966 Mabie and Ockvirk Mechanisms and Dynamics of Machinery Limusa Wiley, 1978 Hartenberg and Denavit Kinematic Synthesis of Linkages McGraw Hill, 1964 Kenneth, Waldron, Gary, Kinematics, Dynamics, and Design of Machinery Wiley, 1999 Temas de la unidad. 1. Vibración natural. 2. Vibración forzada. 3. Amplitud de vibración. 4. Transmisibilidad. 5. Amortiguación. 6. Rotación excéntrica de flechas. 7. Frecuencia natural y velocidad crítica. 8. Frecuencia natural de una flecha con varias masas. 9. Flechas con diámetro variable. 10. Velocidades críticas de mayor orden. 11. Vibraciones torsionales. 12. Flechas escalonadas. 13. Sistema de torsión con engranaje
-
Upload
ruben-yanez-rangel -
Category
Documents
-
view
73 -
download
1
description
Unidad 5 de mecanismos
Transcript of Unidad 5 Vibraciones

UNIDAD 5Principios
pedagógicos
respaldados
Matices
respaldados
Recursos de apoyo
Texto Referencias
Duración
estimada
8 horas
VIBRACION DE MAQUINAS
Resultado de Aprendizaje:
Análisis de los diferentes tipos de
Vibraciones y sus efectos sobre
maquinas
Aprender a
aprender
Aprender a
hacer
Aprender a
Ser y Bien
Ser
Mejora
Continua
Espíritu
Emprendedor
Vinculación
Profesional y
Social
J. P. Den
Hartog
Mecánica de
las
Vibraciones,
McGraw-Hill,
1966
Mabie and
Ockvirk
Mechanisms and
Dynamics of
Machinery
Limusa Wiley,
1978
Hartenberg and
Denavit
Kinematic
Synthesis of
Linkages
McGraw Hill,
1964
Kenneth,
Waldron, Gary,
Kinematics,
Dynamics, and
Design of
Machinery
Wiley, 1999
Temas de la unidad.
1. Vibración natural.
2. Vibración forzada.
3. Amplitud de vibración.
4. Transmisibilidad.
5. Amortiguación.
6. Rotación excéntrica de flechas.
7. Frecuencia natural y velocidad
crítica.
8. Frecuencia natural de una flecha
con varias masas.
9. Flechas con diámetro variable.
10. Velocidades críticas de mayor
orden.
11. Vibraciones torsionales.
12. Flechas escalonadas.
13. Sistema de torsión con engranaje

5.1 VibracionesIntroducción:En general una vibración es un movimiento de vaivén alrededor de un punto de equilibrio, alpasar un intervalo de tiempo, el movimiento se repite con todas sus características; a esteintervalo de tiempo se le denomina, “periodo de la vibración”.
En si la vibración es inherente a toda maquina, debido al movimiento de sus elementos, loscuales pueden girar, oscilar, o reciprocar en su función. Teóricamente, un rotor cuyo centrode masa se localice en el eje de rotación no vibrara, sin embargo si el centro de masa estaligeramente fuera de su eje de rotación, la vibración se presentara, al entrar en operación elrotor.
La vibración puede ser de utilidad o indeseada, ejemplos devibración útil, se tienen en los alimentadores automáticos dematerial para líneas de producción, en los roto-taladros o en uncepillo de dientes eléctrico. Como ejemplos de vibraciónindeseada, citaremos algunos comunes como son: losterremotos, la vibración en los automóviles, debida al motor oel camino, ondas de viento empujando un puente en ráfagascuya frecuencia coincida con una frecuencia natural delpuente…etc.
En general Existen dos tipos de vibración, libre y forzada, lascuales pueden ser evaluadas con y sin amortiguamiento.
5.1 Vibraciones
Nomenclatura.
1. Periodo (T): Tiempo que tarda en repetirse un movimiento, con todas sus características.2. Frecuencia (f): Es el inverso del Periodo y se define como el numero de repeticiones por
unidad de tiempo, sus unidades son ciclos por segundo, cips, a las que se refiere comúnmente como Hertz.
3. Frecuencia circular(w): Frecuencia dada en radianes por segundo, utilizada para el análisis de la vibración por los métodos vectoriales.
4. Amplitud: Valor máximo del desplazamiento de la vibración. 5. Resonancia: Se da cuando un sistema se somete a la aplicación de una fuerza que puede
ser relativamente pequeña pero repetida, con una frecuencia igual a la frecuencia natural del sistema, originando que la amplitud de vibración del sistema crezca en magnitud.
6. Amortiguación: Se llama así a cualquier elemento que extrae energía de un sistema vibrante.
7. Transmisibilidad: Es la razón del desplazamiento o fuerza resultante al desplazamiento o fuerza aplicada.
8. Aislamiento de la vibración: La función de un sistema aislador es reducir la magnitud de la fuerza transmitida desde el sistema a la estructura o reducir la magnitud del movimiento transmitido desde la estructura bajo vibración al sistema. A la eficiencia de reducción del aislador se le llama transmisibilidad del aislador.

Relaciones entre frecuencia, frecuencia circular y Periodo.
Basándonos en el movimiento armónico. El movimiento armónico puede describirse a través
de la ecuación: x = Sen wt, de donde podemos observar que un ciclo se completa cuando
wt = 2p, donde t será el periodo, de aquí que: T = seg
Ya que la frecuencia es el reciproco del periodo, f = = = ciclos por segundo
Luego, la frecuencia circular será: w = 2pf =
Ejercicio.a)Determine la frecuencia de excitación , que sufre la suspensión de un automóvil por los topes de carretera, suponga, que el auto va a 140 Km/hr, y que la distancia entre los topes es de 2.5 mts. b) Si la frecuencia natural de un auto es de 1.6 Hz, a que distancia deberán colocarse topes en la colon para evitar que los autos corran a 100 Km/hrRespuestas: a) Velocidad = 140 (1000)/ 3600 = 38.89 mts/seg, w= 38.89 /2.5 = 15.6 ciclos/seg, b) Velocidad = 27.77 mts/seg, distancia = 27.77/1.6 = 17.36 mts (pueden ponrse cada 1.7mts)
5.1 Vibraciones
2p
ww
2p
1T
2p
T
5.1 Vibración natural
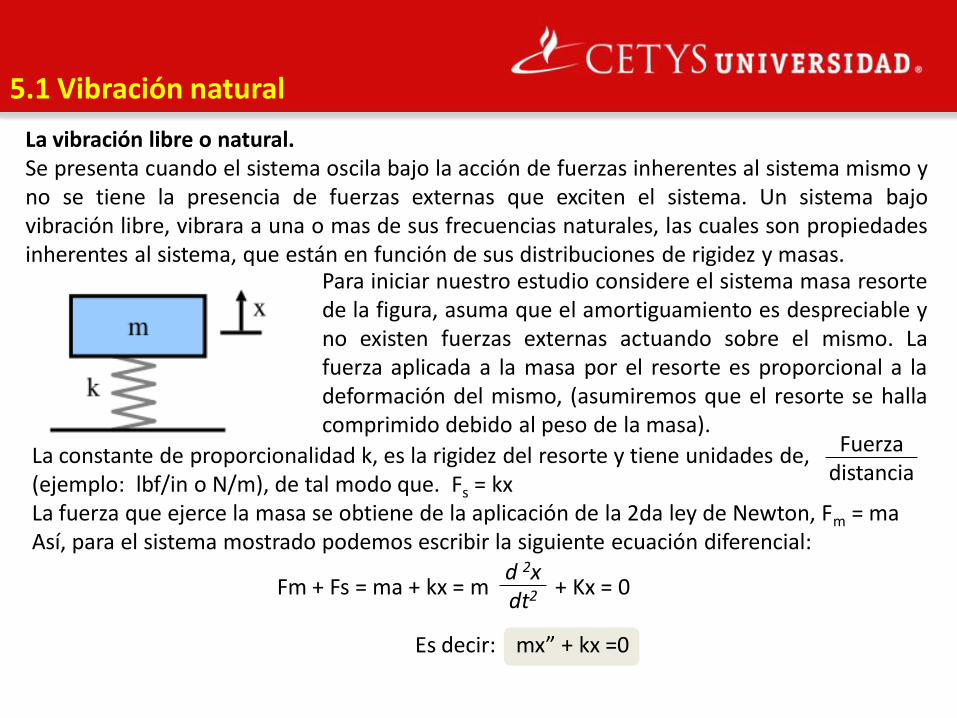
La vibración libre o natural.Se presenta cuando el sistema oscila bajo la acción de fuerzas inherentes al sistema mismo yno se tiene la presencia de fuerzas externas que exciten el sistema. Un sistema bajovibración libre, vibrara a una o mas de sus frecuencias naturales, las cuales son propiedadesinherentes al sistema, que están en función de sus distribuciones de rigidez y masas.
Para iniciar nuestro estudio considere el sistema masa resortede la figura, asuma que el amortiguamiento es despreciable yno existen fuerzas externas actuando sobre el mismo. Lafuerza aplicada a la masa por el resorte es proporcional a ladeformación del mismo, (asumiremos que el resorte se hallacomprimido debido al peso de la masa).
La constante de proporcionalidad k, es la rigidez del resorte y tiene unidades de, (ejemplo: lbf/in o N/m), de tal modo que. Fs = kxLa fuerza que ejerce la masa se obtiene de la aplicación de la 2da ley de Newton, Fm = maAsí, para el sistema mostrado podemos escribir la siguiente ecuación diferencial:
Es decir: mx” + kx =0
Fuerzadistancia
Fm + Fs = ma + kx = m + Kx = 0d 2xdt2
5.1 Vibración natural
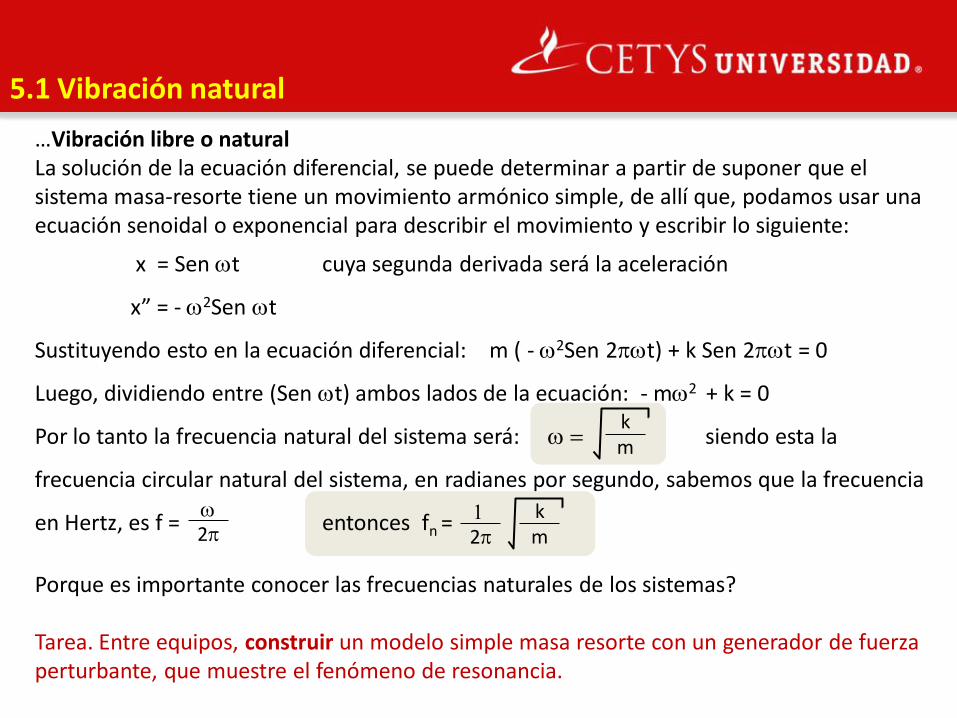
…Vibración libre o naturalLa solución de la ecuación diferencial, se puede determinar a partir de suponer que el sistema masa-resorte tiene un movimiento armónico simple, de allí que, podamos usar una ecuación senoidal o exponencial para describir el movimiento y escribir lo siguiente:
x = Sen wt cuya segunda derivada será la aceleración
x” = - w2Sen wt
Sustituyendo esto en la ecuación diferencial: m ( - w2Sen 2pwt) + k Sen 2pwt = 0
Luego, dividiendo entre (Sen wt) ambos lados de la ecuación: - mw2 + k = 0
Por lo tanto la frecuencia natural del sistema será: w = siendo esta la
frecuencia circular natural del sistema, en radianes por segundo, sabemos que la frecuencia
en Hertz, es f = entonces fn =
Porque es importante conocer las frecuencias naturales de los sistemas?
Tarea. Entre equipos, construir un modelo simple masa resorte con un generador de fuerza perturbante, que muestre el fenómeno de resonancia.
km
w
2p1
2p
km

5.1 Vibración natural
Vibración libre con amortiguamiento.Agregando ahora un amortiguador al modelo, cuya fuerza de respuesta sea proporcional a la velocidad de la masa. La constante de proporcionalidad del amortiguador se llama coeficiente de amortiguamiento y se denomina por la letra c, sus unidades son (lbf-seg/in o N-seg/m).
De modo que la fuerza que origina el amortiguador es:
Fc = -cv = -cx’ = - c dx/dt
Así, la ecuación de suma de fuerzas será ahora:
mx” + cx’ + Kx = 0 (1)
Suponiendo la solución x = ext x’ = xext y x” = x2ext
cm
km
Luego (1) quedara de la siguiente forma: x2mext + cxext + k ext = 0
Dividiendo los dos miembros de la ecuación entre mext, tenemos: x2 + x + = 0
que es la ecuación característica de un sistema en vibración libre con amortiguamiento
cuyas raíces son: x1,2 = +/- 2 –
Y la solución general para el desplazamiento será: x = e + C1e + C2e
C1 y C2 son constantes que dependen de las condiciones de movimiento iniciales…,
- c2m
c2m
km
- c2m
tc
2mkm
- t2 c
2mkm
- t2
-

5.1 Vibración natural …Vibración libre, amortiguamiento critico.
Matemáticamente la ecuación del desplazamiento es una función exponencial, que a su vez físicamente describe la curva desplazamiento-tiempo, compuesta por tres curvas distintas, dependiendo de si el radical es cero, real o imaginario. Caso I. (c/2m)2 = k/m. en este caso el radical es igual a cero y entonces se dice que el sistema tiene un amortiguamiento critico. El valor de la constante de amortiguamiento bajo la cual se halla el sistema se denomina constante critica de amortiguamiento, se denota por la letra griega Ccr y su valor es función estricta de las constantes del sistema m y k.
Ccr2 = 4mk Luego: Ccr = 2 mk y como: k = mwn
2
Ccr = 2mwn
a la razón del amortiguamiento real al amortiguamiento critico se denomina relación de amortiguación y se denomina por la letra z . Luego su formula es: z =
En un sistema con Amortiguamiento critico, el sistema retorna a su equilibrio en un tiempo mínimo y sin oscilar. La figura muestra tres tipos de repuesta de un sistema con Amortiguamiento critico, y desplazamiento inicial x(0).
- c2m
tc
2mkm
- t2
x = e + C1 e + C2 e
c2m
km
- t2
-
cCcr
t
x’o >0x’o = 0x’o <0

5.1 Vibración natural
…Vibración libre sobre-amortiguamiento.Caso II. (c/2m)2 > k/m. cuando el valor dentro del radical es mayor que 1, Se dice que elSistema esta sobre-amortiguado, el valor del radical es real y el movimiento del sistema esdominado por la amortiguación, lo que hace que el sistema se aproxime al equilibrio en formaexponencial, no ocurre oscilación y teóricamente el sistema no regresa a su posición original.
c2m
km
- t2El radical
con las siguientes substituciones
c = 2mwnz y k = mwn2
Puede expresarse como
Y se puede escribir como:
el desplazamiento resultante se comporta
acorde a como se muestra en la figura.
wnt z2 – 1c t
2mzwn t
C1 e
C1
C2
z +[ ]wntz – 12
C2 e z + z – 1[- ]wnt2

…Vibración libre con sub-amortiguamiento.Caso III. (c/2m)2 < k/m. en este caso se presenta sub-amortiguamiento, el valor del radical esimaginario y la amplitud de movimiento del sistema tendera disminuir en forma exponencial,hasta regresar a su condición de equilibrio original. Reescribiendo la ecuación original:
5.1 Vibración natural
- c2m
tx = e + C1 e + C2 e
km - t
c2m
2-i
km - t
c2m
2i
Donde wd = es la frecuencia
natural en radianes por segundo de la armónica amortiguada, y se relaciona con la frecuencia natural no amortiguada a través de la relación adimensional z. Siendo siempre menor la
km
-c
2m
2
frecuencia natural amortiguada que la no amortiguada
En los sistemas mecánicos, la amortiguación constituye una fracción muy pequeña de la amortiguación critica, la tabla muestra valores típicos de amortiguación de algunos sistemas y/o materiales.
wd = wn 1 – z2
Material/sistema z
Amortiguadores de automóvil 0.1 - 0.5
Hule 0.04
Acero Remachado, estructuras 0.03
Concreto 0.02
Madera 0.003
Acero laminado en frio 0.0006
Xe - z wnt
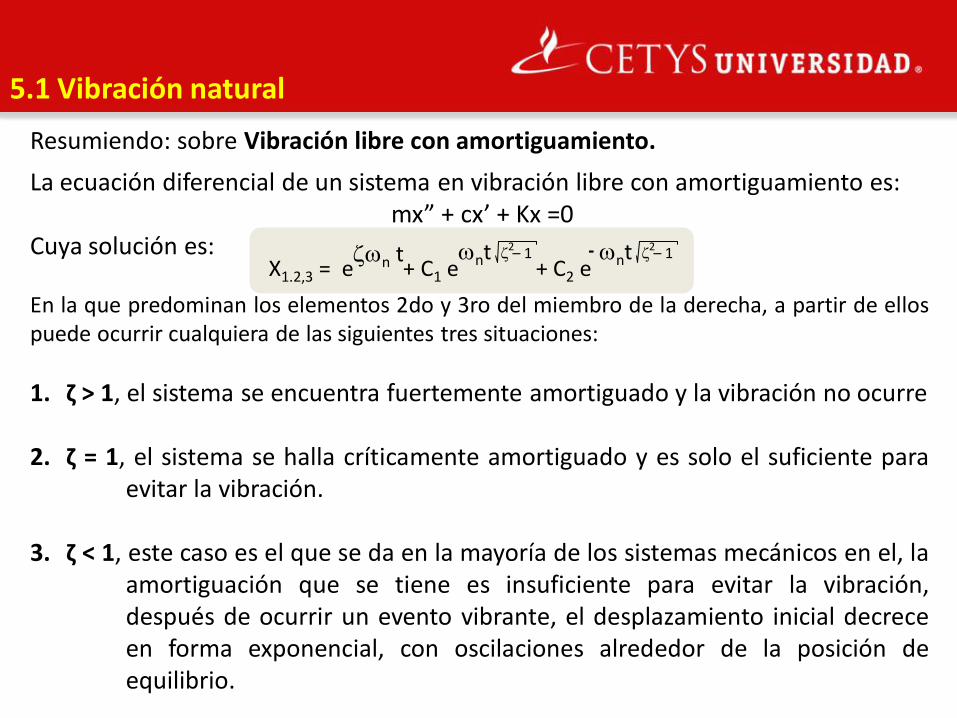
Resumiendo: sobre Vibración libre con amortiguamiento.
La ecuación diferencial de un sistema en vibración libre con amortiguamiento es:mx” + cx’ + Kx =0
Cuya solución es:
En la que predominan los elementos 2do y 3ro del miembro de la derecha, a partir de ellospuede ocurrir cualquiera de las siguientes tres situaciones:
1. ζ > 1, el sistema se encuentra fuertemente amortiguado y la vibración no ocurre
2. ζ = 1, el sistema se halla críticamente amortiguado y es solo el suficiente paraevitar la vibración.
3. ζ < 1, este caso es el que se da en la mayoría de los sistemas mecánicos en el, laamortiguación que se tiene es insuficiente para evitar la vibración,después de ocurrir un evento vibrante, el desplazamiento inicial decreceen forma exponencial, con oscilaciones alrededor de la posición deequilibrio.
5.1 Vibración natural
X1.2,3 = e + C1 e + C2 ewnt z – 12 - wnt z – 12
zwn t

Ejercicio. Una masa de 2 kg descansa sobre una superficie horizontal y esta sujeta por un resorte a un punto fijo, como se muestra en la figura. La k del resorte es de 100 N/m. a) Si la masa del resorte se desplaza ligeramente hacia la derecha y después se libera, despreciando cualquier efecto de fricción, cual será la frecuencia natural del movimiento resultante. i) En radianes por segundo; ii) en Hertz.
b) Si en vez de lo anterior, la masa es ligeramente golpeada de manera que se le induce una velocidad inicial de 2 m/segundo. Cual será la ecuación del movimiento resultante.
c) Si una segunda masa de 0.5 kg se fija en la parte superior de la primera, como cambiara la frecuencia natural? Cual es la nueva frecuencia natural en Hz?.
5.1 Vibración natural
Solución: a)
(b) En general la ecuación de movimiento es: x = Asenωt; donde debemos determinar los valores de A y w, ya que conocemos la velocidad en t =0, diferenciamos la ecuación con respecto al tiempo : x’ = w Acos wt, introduciendo las condiciones iniciales: en t = 0, x = 0 y x‘= 2 m/s obtenemos: x’= 2 = ω Acos(ωt) = 7.07 A A = 2 / 7.07 = 0.283m; Así, la ecuación de movimiento resultante queda como : x = 0.283sin(7.07 t )
(c) La frecuencia natural se reduce, su nuevo valor es 6.32 rad/s
km
w =100
2= = 7.07 rad/s

5.2 Vibración forzada
La vibración forzada, ocurre cuando una fuerza o desplazamiento alternativo se aplica a unsistema. Ejemplos de esta son la agitación por el desbalance en una maquina lavadora o lavibración de un edificio durante un terremoto. En la vibración forzada, la frecuencia devibración es la frecuencia de la fuerza o movimiento aplicado, el orden de la magnituddepende del sistema mecánico mismo. Cuando la frecuencia de la excitación coincide conuna frecuencia natural, se presenta el fenómeno de resonancia, en el que se amplifican lasamplitudes, generando grandes esfuerzos en las estructuras y el sistema mismo.
El diagrama de la figura, muestra una fuerza de excitación sinusoidal aplicada en la masa. Por suma de fuerzas se obtiene la ecuación diferencial del sistema: mx” + Kx = Fo sen Wt
Al dividir ambos miembros de la ecuación por m tenemos:
x” + x = sen Wt
Consideremos: x = X0 sen Wt una solución particular de la ecuación diferencial, en su 2da derivada x”= - Xo W2 sen Wt ; sustituyendo esto en la ecuación diferencial, y dividiendo por sen Wt nos queda:
Xo ( w2 - W2) = Luego Xo =
Siendo esta la solución de la ecuación.
Km
Fo
m
Fo
mFo
m ( w2 - W2)

5.3 Amplitud de la vibración forzada
En la ecuación anterior Xo es el desplazamiento máximo, y relaciona el desplazamiento máximo con la fuerza máxima Fo, introduciendo el valor de k = mw2, la ecuación puede escribirse como sigue:
Donde a la relación se conoce como relación de amplificación del sistema [M], y en el
caso de la vibración forzada sin amortiguamiento, es igual a la transmisibilidad [TR]; la
relación se denomina razón de frecuencias, en varios libros se escribe como [r].
La figura en la pagina siguiente presenta el grafico de esta relación, puede verse en el comocuando W >> w el factor de amplificación se aproxima a cero, la fuerza de excitación puedeser significativa pero con vibración mínima. En resonancia, cuando W = w el factor deamplificación y la amplitud de movimiento se disparan al infinito. Cuando W << w, laamplitud de vibración es aproximadamente F0/k, que es la deformación que el sistematendría si F0 fuese estática. En base a esto, algunas maquinas se montan sobre estructurasmuy pesadas o se sujetan a grandes bloques de concreto, buscando bajar la relación W/w
para disminuir la amplitud de vibración.En el mismo grafico, se muestran diferentes curvas de la relación de amortiguamiento [z] y suinfluencia en la amplitud de movimiento.
Fo
k
Xo=
1
W
w1 –
2
W
w
Xo
Y0=
Xo
Y0

5.3 Amplitud de la vibración forzada
W
wRelación de frecuencias r =
Rela
ció
n d
e A
mp
lifi
cació
n
.
Aquí, F0/k se considera esla deformación estáticadel resorte, bajo la acciónconstante de F0
Sin amortiguamiento
Amortiguamientocritico
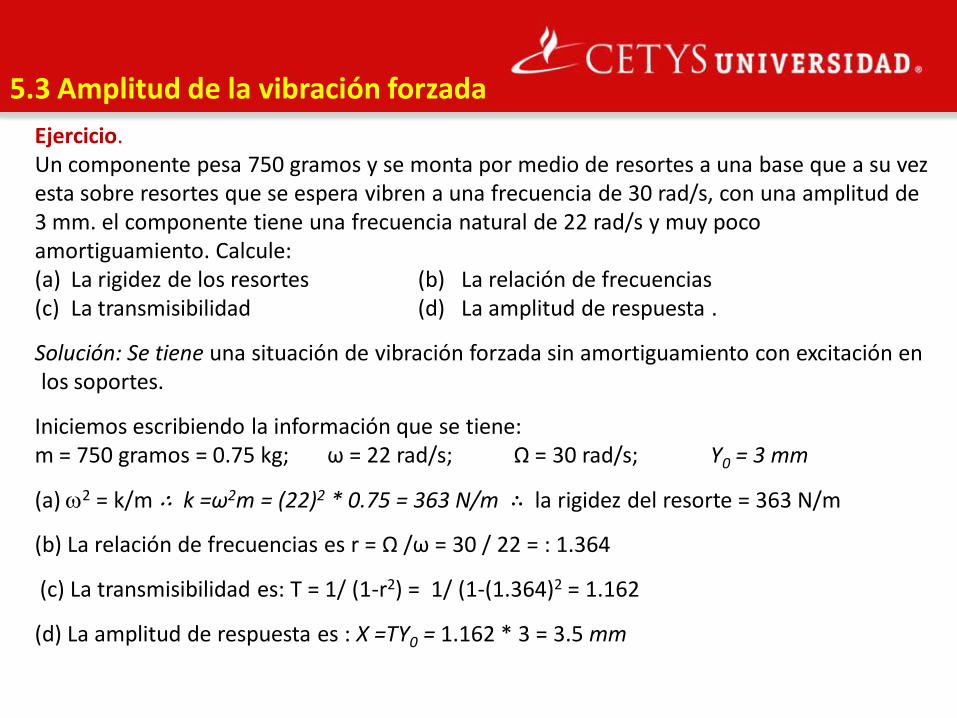
Ejercicio. Un componente pesa 750 gramos y se monta por medio de resortes a una base que a su vez esta sobre resortes que se espera vibren a una frecuencia de 30 rad/s, con una amplitud de 3 mm. el componente tiene una frecuencia natural de 22 rad/s y muy poco amortiguamiento. Calcule:(a) La rigidez de los resortes (b) La relación de frecuencias (c) La transmisibilidad (d) La amplitud de respuesta .
Solución: Se tiene una situación de vibración forzada sin amortiguamiento con excitación en los soportes.
Iniciemos escribiendo la información que se tiene:m = 750 gramos = 0.75 kg; ω = 22 rad/s; Ω = 30 rad/s; Y0 = 3 mm
(a) w2 = k/m ∴ k =ω2m = (22)2 * 0.75 = 363 N/m ∴ la rigidez del resorte = 363 N/m
(b) La relación de frecuencias es r = Ω /ω = 30 / 22 = : 1.364
(c) La transmisibilidad es: T = 1/ (1-r2) = 1/ (1-(1.364)2 = 1.162
(d) La amplitud de respuesta es : X =TY0 = 1.162 * 3 = 3.5 mm
5.3 Amplitud de la vibración forzada
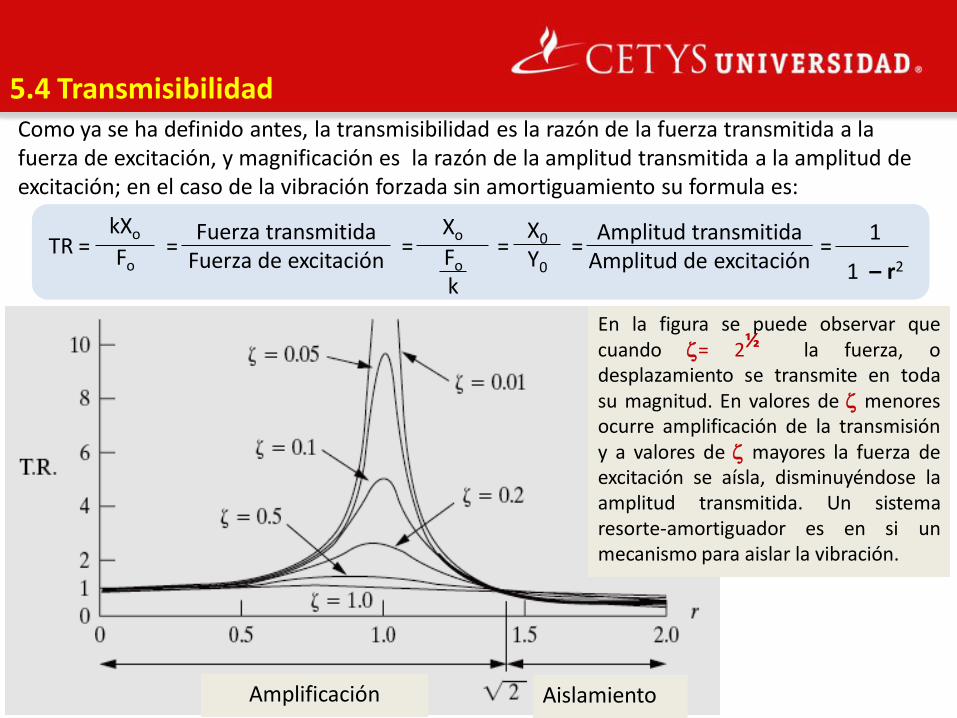
5.4 TransmisibilidadComo ya se ha definido antes, la transmisibilidad es la razón de la fuerza transmitida a la fuerza de excitación, y magnificación es la razón de la amplitud transmitida a la amplitud de excitación; en el caso de la vibración forzada sin amortiguamiento su formula es:
Amplificación Aislamiento
En la figura se puede observar quecuando z= 2½ la fuerza, odesplazamiento se transmite en todasu magnitud. En valores de z menoresocurre amplificación de la transmisióny a valores de z mayores la fuerza deexcitación se aísla, disminuyéndose laamplitud transmitida. Un sistemaresorte-amortiguador es en si unmecanismo para aislar la vibración.
1
1 – r2Fo
kXo Fuerza transmitidaFuerza de excitación
Amplitud transmitidaAmplitud de excitaciónFo
k
Xo X0
Y0TR = = = = = =
Ejercicio.Un instrumento delicado cuya masa es de 500 g, se monta sobre resortes para aislarlo de lavibración de la mesa sobre la cual se coloca.Se sabe que la mesa vibra con una amplitud de 4 mm a 50 Hz. El instrumento esta diseñadopara que tolere un máximo de amplitud de 0.5 mm. ¿Cual debe ser la k máxima de losresortes que deban utilizarse en el montaje, asuma que el amortiguamiento esdespreciable. (Vibración forzada sin amortiguamiento)
5.4 Transmisibilidad

Aquí conocemos: m = 500 g = 0.5 kg Y0 = 4 mmΩ = 50 Hz = 2π*50 = 314.2 rad/s X0 ≤ 0.5 mm.
Requerimos determinar k, la cual define la frecuencia natural del sistema, de manera querequerimos encontrar el valor máximo permitido de la frecuencia natural del sistema.Conocemos la frecuencia de excitación, luego necesitamos saber cual es la relación defrecuencias, r.Para determinar r, calculas la transmisibilidad con X0 (valor del desplazamiento máximo) yY0. Luego entonces TR = Xo/Yo = 0.5 / 4 = 0.125Sabemos que si r< 1 T es positivo mientras que si r > 1 T será negativo, d manera quetenemos dos situaciones que satisfacen las condiciones:
1-r2 = 1/TR 1-r2 = - 1/.125Tomando la primera r2 = 1-8 = -7 …. Esto nos lleva a un valor imaginario para r, por lo quelo desechamos. Con la segunda r2 = 1+8 = 9 r =3Observando la figura de transmisibilidad, vemos que para cuando r >1, entre mayor es rmenor será la amplitud. Esto significa que le valor que obtuvimos de r = 3 es el valor maspequeño que debemos tener, para lograr que la respuesta de amplitud sea del nivelrequerido. Luego r ≥ 3. Luego r = Ω /ω∴ Ω/ ω ≥ 3Esto es Ω ≥ 3ω ∴ Ω/3 ≥ω ω ≤ 314.2 /3 = 104.7 rad/s. Este es el valor máximo que w
puede tener. Ahora k = mω2 = 0.5 * 76.92 = 5481 N/m. por ende este es Valor máximopermisible de la k de los resortes
5.4 Transmisibilidad… solución
Fo sen Wt
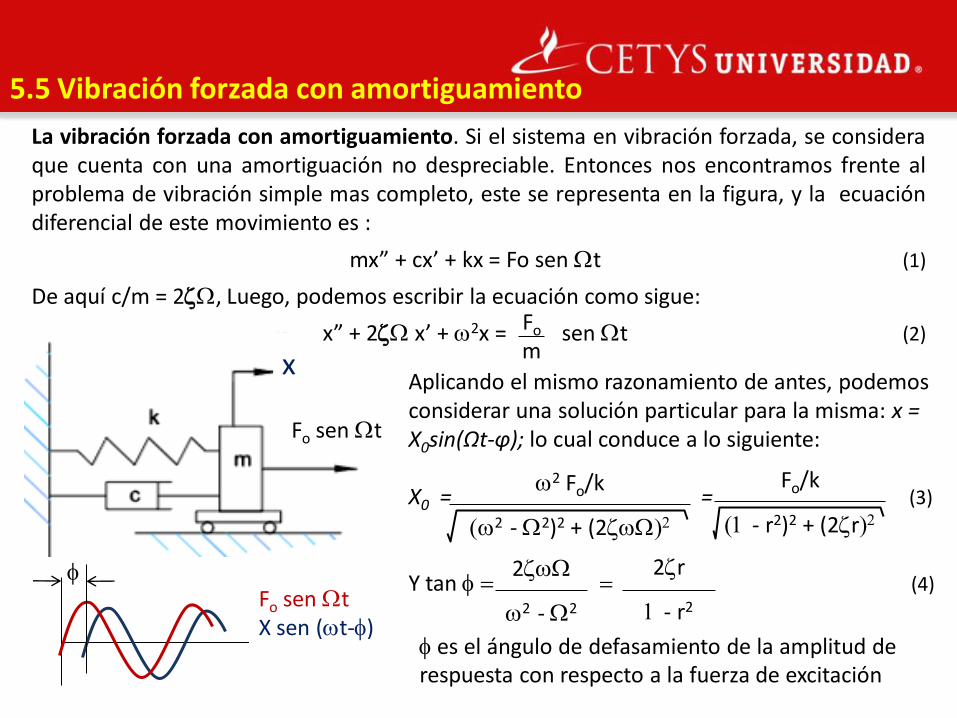
La vibración forzada con amortiguamiento. Si el sistema en vibración forzada, se consideraque cuenta con una amortiguación no despreciable. Entonces nos encontramos frente alproblema de vibración simple mas completo, este se representa en la figura, y la ecuacióndiferencial de este movimiento es :
mx” + cx’ + kx = Fo sen Wt (1)
De aquí c/m = 2zW, Luego, podemos escribir la ecuación como sigue:
x” + 2zW x’ + w2x = sen Wt (2)
5.5 Vibración forzada con amortiguamiento
Fo
m
Aplicando el mismo razonamiento de antes, podemos considerar una solución particular para la misma: x = X0sin(Ωt-φ); lo cual conduce a lo siguiente:
X0 = = (3)
Y tan f = = (4)
w2 Fo/k
(w2 - W2)2 + (2zwW)2
Fo/k
(1 - r2)2 + (2zr)2
2zwW
w2 - W2
2zr
1 - r2
f es el ángulo de defasamiento de la amplitud de respuesta con respecto a la fuerza de excitación
fFo sen WtX sen (wt-f)
x

La figura 1 muestra la forma en que la amplitudde la respuesta X0, varia con la frecuencia de laexcitación. La figura 2, muestra el ángulo defase φ en grados, graficado contra r. Las curvasse muestran con diferentes valores de ζ, con elpropósito de ilustrar el efecto en la amplitud derespuesta por la cantidad de amortiguamientoen el sistema.
Figura 2
Figura 1
5.5 Vibración forzada con amortiguamiento
Amplitud de respuesta y ángulo de fase de un sistema amortiguado, sometido a una fuerza, graficados contra la relación de frecuencias

Puede no ser muy claro de la figura 1, que la máxima amplitud de respuesta no ocurrecuando r = 1, como pasa en un sistema sin amortiguamiento, de la ecuación 3, debe serclaro que X0 será máxima cuando el denominador [(1-r2)2 + (2ζr)2] sea mínimo. Paraencontrar el valor de r en que ello ocurre, necesitamos diferenciar con respecto a r, asíencontraremos que la amplitud es máxima cuando r = 1− 2ζ2 –o– Ω = ω 1− 2ζ2 . Paravalores pequeños de ζ, la amplitud máxima ocurre cuando r ≈ 1, pero si el sistema tienemucho amortiguamiento, entonces la frecuencia a la cual la respuesta es máxima es menorque la frecuencia natural. Observe que el termino resonancia s utilizado para denotar lafrecuencia a la cual la amplitud de respuesta es máxima, y en ocasiones cuando r = 1.cuando se tiene poco amortiguamiento, ambos son casi iguales, pero con muchoamortiguamiento debe aclararse que definición usar, en algunos libros, la resonancia esaquella para la cual r = 1, es decir, cuando la frecuencia natural y la frecuencia naturalamortiguada son iguales, mientras que la frecuencia a la cual ocurre la frecuencia máximaes ω 1− 2ζ2 .La magnificación será:
Y la Transmisibilidad es:
5.5 Vibración forzada con amortiguamiento
M = = Fo
k
Xo 1
(1 - r2)2 + (2zr)2
T = = F0
Po1 + (2zr)2
(1 - r2)2 + (2zr)2

La forma en que varia la transmisibilidad con el amortiguamiento y la relación de frecuencias se muestra en la figura abajo.
5.5 Vibración forzada con amortiguamiento
Como con la respuesta de amplitudmáxima, la fuerza transmitida alsoporte será máxima cuando:
Ω =ω 1− 2ζ2
La fuerza transmitida es igual a lafuerza de excitación en Ω = √2ω.Conforme el amortiguamiento enel sistema se incrementa, Lamagnitud de la fuerza transmitidaes mas pequeña hasta Ω < √2ω,pero si la frecuencia de excitaciónes mayor el amortiguamiento seinvierte.
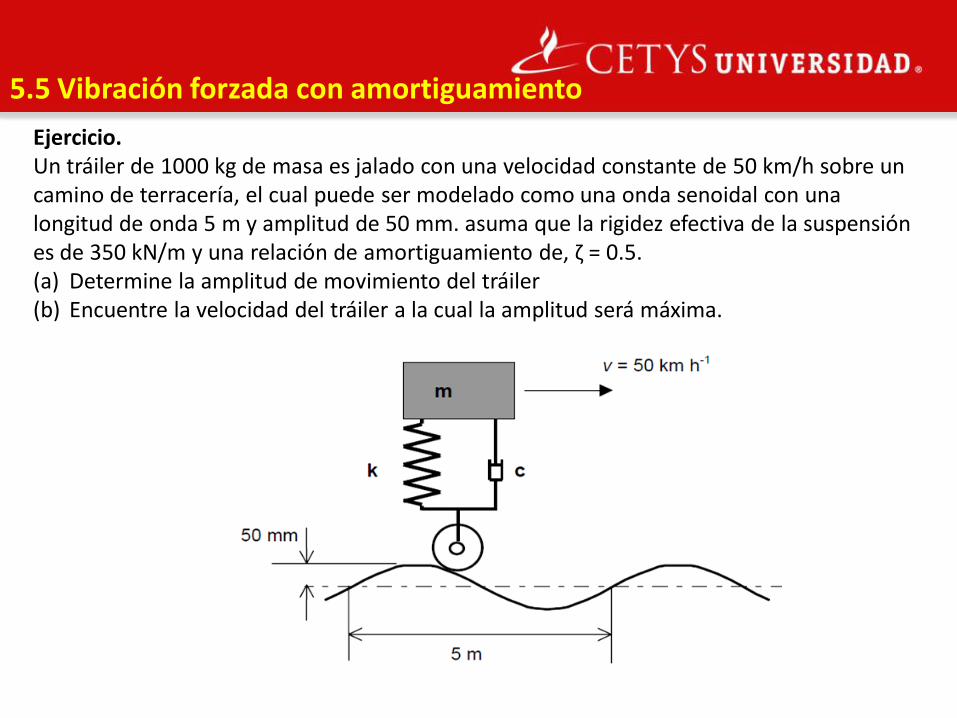
Ejercicio. Un tráiler de 1000 kg de masa es jalado con una velocidad constante de 50 km/h sobre un camino de terracería, el cual puede ser modelado como una onda senoidal con una longitud de onda 5 m y amplitud de 50 mm. asuma que la rigidez efectiva de la suspensión es de 350 kN/m y una relación de amortiguamiento de, ζ = 0.5. (a) Determine la amplitud de movimiento del tráiler (b) Encuentre la velocidad del tráiler a la cual la amplitud será máxima.
5.5 Vibración forzada con amortiguamiento

5.5 Vibración forzada con amortiguamiento
Este es un caso de vibración forzada debido al efecto de excitación del terreno. Imagine que el tráiler esta estacionado y el terreno bajo el se esta moviendo a la izquierda a una velocidad de 50 km/h = 50*1000/3600 = 13.9 m/s.
Un ciclo habrá ocurrido cuando el terreno se mueva 5 m, esto tomara 5/13.9s.
Luego, el numero de ciclos por segundo es de 13.9/5 = 2.78 Hz.
De manera que el movimiento del tráiler sobre el terreno es equivalente a aplicar una excitación de amplitud de 50 mm a una frecuencia de 2.78 Hz.
En general la frecuencia será la longitud de onda dividida por la velocidad.En este caso conocemos:
m = 1000 kg; k = 350 kN/m ζ = 0.5
Ω = 2πf = 2π*2.78 =17.47 rad/s y Y0 = 50 mm = 0.05 m

5.7 Rotación excéntrica de flechas.
a) Determinemos primero w y r, luego:
w = [k/m] ½ = [ 350 x 1000/1000]½ = 18.71 rad/s
De este modo, la relación de frecuencias será: r = W/w = 17.47 / 18.71 = 0.934De manera que la amplitud para esta velocidad es:
Xo = Yo =0.05 = 0.073m
b) La máxima amplitud ocurre en: Ω = ω 1− 2ζ2 = 18.71 1− 2 *0.5+2 = 18.7 0.5 = 13.23 rad/s
La frecuencia de excitación (en Hz) es la velocidad, V, dividida por la longitud de onda, de modo que
W= 2pv / 5 V = 5W/2p = 5[13.23]/2[3.1416] = 10.53 m/s
Y la velocidad a la cual el tráiler se vera sometido a la amplitud máxima es
V= 10.53 [3600] /1000 = 38 Km/h
1 + (2zr)2
(1 - r2)2 + (2zr)2
1 + (2 [0.5][0.934])2
(1 - 0.9342)2 + (2[0.5][0.934])2
Solución:
5.7 Rotación excéntrica de flechas.
Cuando se tienen flechas rotantes desbalanceadas, las deflexiones y vibración a ciertas velocidades se vuelve extremadamente severa. Debido a que con el paso del tiempo, la maquinaria utilizada por el hombre opera a cada vez altas velocidades, este tema cobra cada vez mayor importancia. Los fenómenos que se presentan son:1. Aumento en la deflexión de la flecha, conforme la velocidad de rotación se aproxima
a la velocidad critica.2. Deflexiones muy dañinas cuando se opera a la velocidad critica, a menos que exista
algún amortiguamiento, en forma de fricción. 3. Retorno gradual a la condición estable conforme se pasa a velocidades mayores a la
velocidad critica.

5.7 Rotación excéntrica de flechas.
krFO
M
O g
d
w
e
r
FO = M(r + e) w2
kr
l
La figura muestra un rotor que gira, yesta formado por la masa M en forma dedisco colocada sobre una flecha, entrelos rodamientos. La masa de la flechacomparada con M, será consideradadespreciable, para nuestro propósito.Aun cuando en la actualidad, se logra unalto grado de balanceo durante lafabricación de rotores, todavía persistenfallas en la distribución de la masa lo quegenera la excentricidad (e), respecto del
eje de rotación del centro de masa (g) de M. Con elgiro de la flecha, la excentricidad, produce la fuerzacentrifuga que ocasiona que la flecha de flexione unacantidad “r”. Viéndose desde el extremo, parecieraque el centro O de la flecha girase descentrado sobreun circulo de radio “r.” la fuerza de inercia (FO), queproduce la rotación forzada se muestra en la formulade la figura, la flecha responde a dicha fuerza comoun resorte.

5.7-5.8 Rotación excéntrica de flechas- Velocidad critica
La fuerza de respuesta de la flecha, es función de su deflexión, Ff = kr, donde k es la constante de resorte de la flecha en flexión. En este caso la aceleración es A = (r + e) w2, a partir de esto la fuerza de inercia es FO = M (r + e) w2 y se puede escribir la ecuación de equilibrio estático de la siguiente forma:
SF = M (r + e) w2 – kr = 0De aquí se puede obtener la formula para el radio de rotación r, como sigue:
en la ecuación se puede observar que cuando k/M tiende al valor de w2, el radio de giro de la excentricidad r tiende a crecer al infinito, de aquí que se pueda concluir que la frecuencia circular natural de la flecha es: wn = k/M la ecuación para r puede escribirse en forma adimensional como sigue:
Cuando w = wn; w se denomina velocidad critica de la flecha, y se designa como wC, que en revoluciones por minuto se expresa por la ecuación de conversión: nC = 60 wn / 2p, estodebido a que wn generalmente se expresa en radianes por segundo.
ew2
(k/M) - w2r =
(w/wn)2
1 – (w/wn)2
re
=

La ecuación de la velocidad critica, se puede expresar en función de la deflexión estática de la flecha como se muestra a continuación.
Donde k esta en libras por pulgada, (sistema fps). La constante k del resorte se puede
determinar a partir de la deflexión estática dest de la flecha, debida al peso W, a raíz de ello podemos escribir k = W/dest ; substituyendo esto en la ecuación anterior tenemos
De los libros de mecánica de materiales, sabemos que la deflexión estática generada por una masa M colocada centralmente en una viga uniforme se determina por la formula:
dest = Wl 3/48EI
Donde I es el momento de inercia de la viga, en una flecha de sección circular I = pd4/64 substituyendo en la ecuación de la velocidad critica:
Se concluye que cambiando el material o las dimensiones de la flecha, se puede modificar la velocidad critica de la flecha y prevenir que opere cerca de la velocidad de operación
nC = wn = = = = 188602p
602p
kM
30
p
kgW
30
p
386kW
kW
nC = 1881
dest
nC = 290Ed4
Wl3
5.8 Velocidad critica

La figura muestra que si1.414 nC > n < 0.707 nC
La amplitud de rotación es menorque el doble de la excentricidad e.por ejemplo, si la excentricidad es0.001” la amplitud de rotación será0.002” con n/nC = 1.414.Es interesante notar que cuandow/wn >> 1, el valor de r/e = -1indicando que el centro de masa Mesta en el eje de rotación y laflecha estará girando alrededor delcentro de masa de M. en todo estedesarrollo se supuso que la masade la flecha era despreciable, pero
Fact
or
de
Am
plif
icac
ión
re
w
wn
0.707 1.414
cuando se deba incluir, y la masa sea uniforme, se puede agregar el 50% de la masa de laflecha a la masa M para determinar la velocidad critica.La velocidad de operación recomendada es:
V operación < 0.8 * nC – o – V operación > 1.25 * nC
5.8 Velocidad critica

La tabla de la derechaproporciona las formulas paraobtener la velocidad criticaen flechas con carga uniformey diferentes tipos de apoyo,las formulas presuponen eluso de material de acero conmodulo de elasticidad:
E = 29,000,000
El sitio que abajo se anotaproporciona acceso a unaherramienta de calculo develocidades criticas enflechas.
5.8 Velocidad critica
http://www.denysschen.com/rotating/critSpeed.asp
r
l
e
M
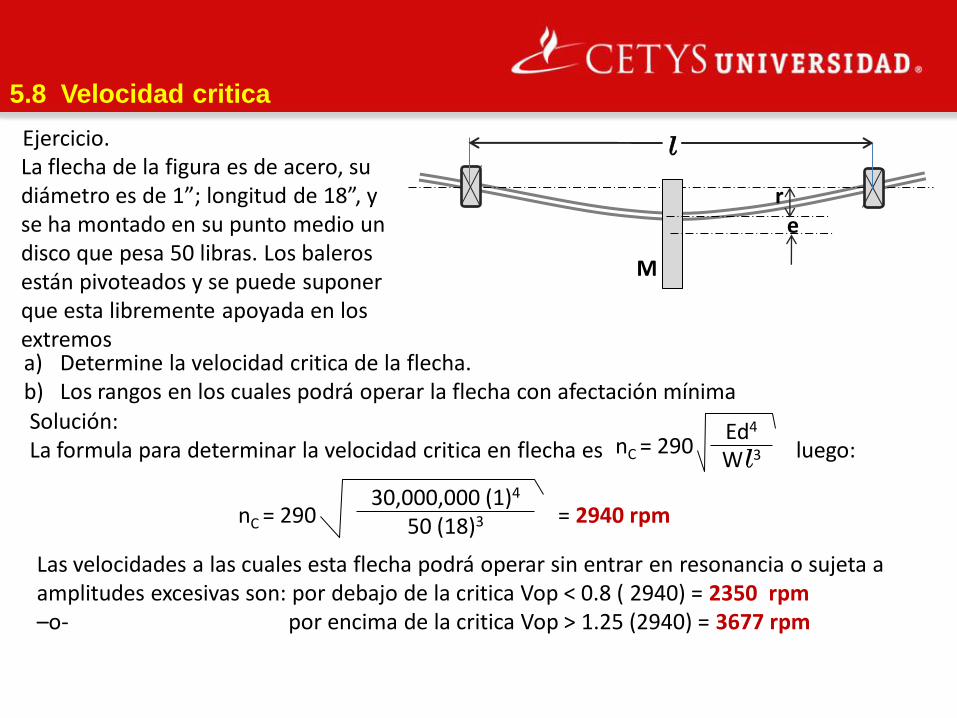
Ejercicio.La flecha de la figura es de acero, su diámetro es de 1”; longitud de 18”, y se ha montado en su punto medio un disco que pesa 50 libras. Los baleros están pivoteados y se puede suponer que esta libremente apoyada en los extremos a) Determine la velocidad critica de la flecha. b) Los rangos en los cuales podrá operar la flecha con afectación mínimaSolución:La formula para determinar la velocidad critica en flecha es luego: nC = 290
Ed4
Wl3
nC = 290 = 2940 rpm 30,000,000 (1)4
50 (18)3
Las velocidades a las cuales esta flecha podrá operar sin entrar en resonancia o sujeta a amplitudes excesivas son: por debajo de la critica Vop < 0.8 ( 2940) = 2350 rpm–o- por encima de la critica Vop > 1.25 (2940) = 3677 rpm
5.8 Velocidad critica
5.8 Frecuencia natural de una flecha con varias masas
Y3
l
M1
Y2
Y1
M2
M3
F1 F2 F3
d3d2
d1
W2W1
W3
Desplazamientos en Flexión dinámica
Deflexiones en Flexión estática
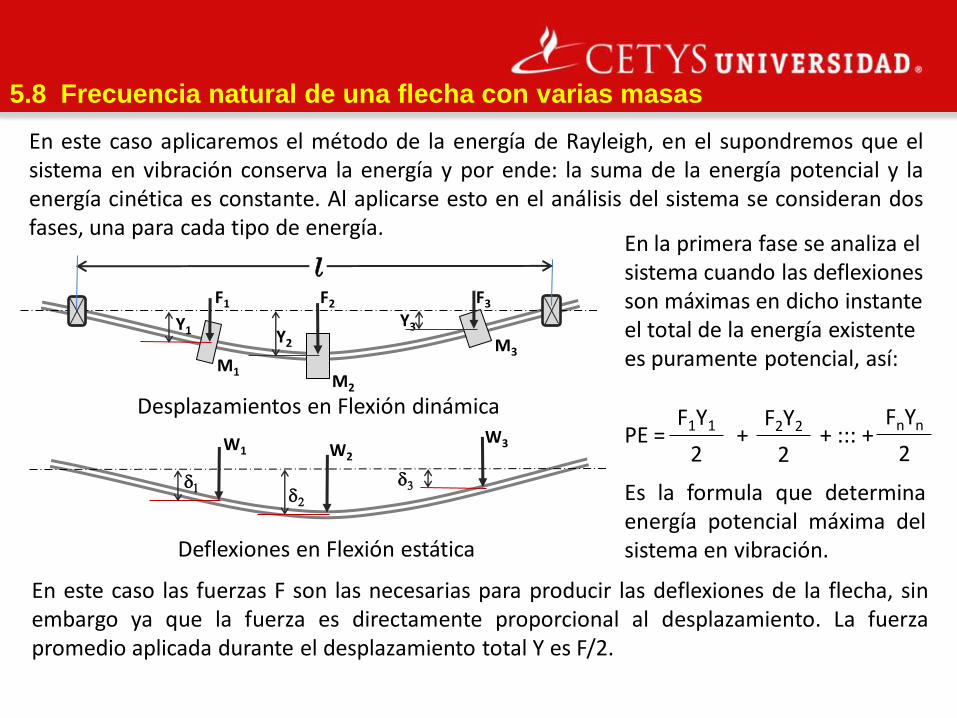
En este caso aplicaremos el método de la energía de Rayleigh, en el supondremos que elsistema en vibración conserva la energía y por ende: la suma de la energía potencial y laenergía cinética es constante. Al aplicarse esto en el análisis del sistema se consideran dosfases, una para cada tipo de energía.
En la primera fase se analiza el sistema cuando las deflexiones son máximas en dicho instante el total de la energía existente es puramente potencial, así:
PE = + + ::: +
Es la formula que determinaenergía potencial máxima delsistema en vibración.
F1Y1
2
F2Y2
2
FnYn
2
En este caso las fuerzas F son las necesarias para producir las deflexiones de la flecha, sinembargo ya que la fuerza es directamente proporcional al desplazamiento. La fuerzapromedio aplicada durante el desplazamiento total Y es F/2.

Al ocurrir la vibración la flecha pasa por la fase en que no hay deflexiones, instante en que laenergía potencial es cero y la energía cinética es máxima, y en el cual las velocidades de lasmasas son máximas. Suponiendo movimiento armónico simple, las velocidades se dan por la
formula: V = Ywn, y las energías cinéticas son KE = MV2/2 = M (Ywn)2 /2. De aquí que laenergía cinética del sistema es:
KE = [ + + ::: + ] = [ W1Y12 + W2Y2
2 + ::: + WnYn2 ]
Puede determinarse la ecuación para la frecuencia natural del sistema igualando las dosecuaciones de energía, pero se desconocen las fuerzas de Inercia F y los desplazamientos Ygenerados en la flexión dinámica, para resolverlo, puede suponerse que los desplazamientosY del caso vibratorio son proporcionales a las deflexiones d del caso estático luego:
= = ::: =
Y como las fuerzas que deflectan un resorte son proporcionales a las deflexiones, entonces:
= = =
Igualando las ecuaciones de energía y eliminando F y Y con estas igualdades, la ecuación parala frecuencia natural queda como:
wn2 = g = g
wn2
2M1Y1
2 M2Y22 MnYn
2 wn2
2g
5.8 Frecuencia natural de una flecha con varias masas
Y1
d1
Y1
d1
Y2
d2
F1
W1
Y1
d1
F2
W2
Y2
d2
Fn
Wn
Yn
dn
W1d1 + W2d2 + .. + Wn dn
W1d12 + W2d2
2 +… Wndn2
SWd
SWd2
Ruben
Tachado
Ruben
Tachado
Ruben
Tachado

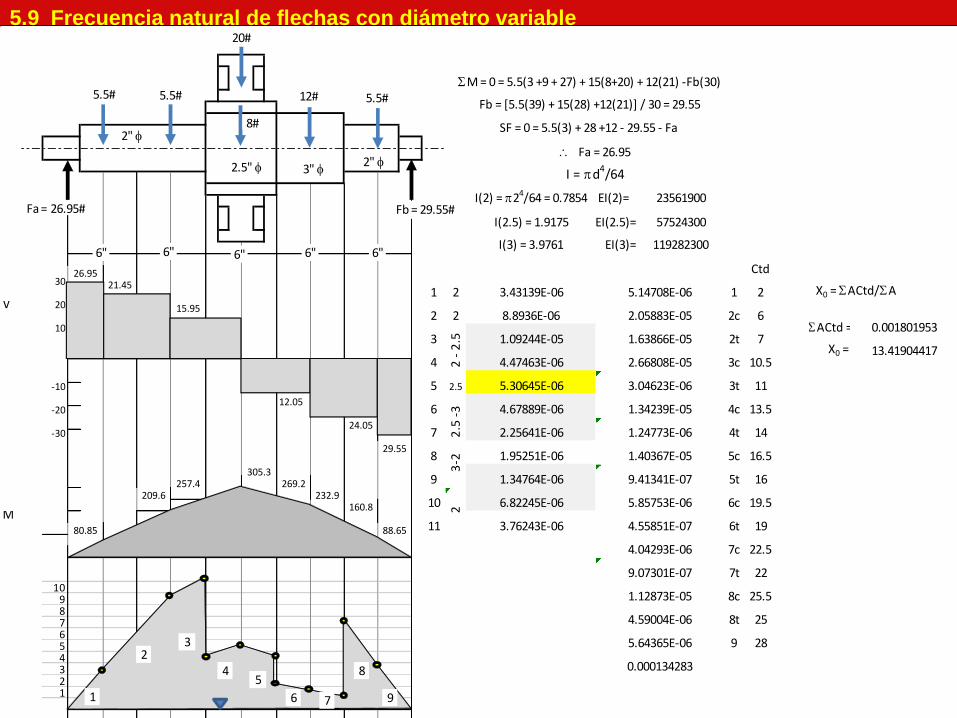
5.9 Frecuencia natural de flechas con diámetro variable
La formula encontrada para flechas con varias masas, nos permite calcular la 1ra. frecuencianatural es decir la frecuencia de resonancia que se tiene a la velocidad mas baja y se puedeutilizar aun para flechas de diámetro con variación discreta, sin embargo, debido a que la IA
es variable, no es fácil obtener las formulas para la deflexión estática. En estos casos puedeaplicarse con mayor facilidad el alguno de los diferentes métodos gráficos desarrollados enla mecánica de materiales. El método que veremos aquí, se basa en la aproximación delvalor de la deflexión a través de diferenciar la curvatura de la flexión, donde se demostradoque :
Variable Formula
Deflexión y
La pendiente de la curvatura Tg q dy/dx
El momento M EI d2y/dx2
El cortante V EI d3y/dx3
La carga P EI d4y/dx4
De donde se deduce que la deflexión puede obtenerse mediante la integración de las áreas bajo la curva a partir de la carga, a continuación se muestra un ejemplo su aplicación
Ruben
Tachado
30
V 20
10
-10
-20
-30
M
10987654321
7550 4 5 625 2 3
0 125 150 275
4 3
100200300400500600
1 2 3 4 5 6 7 8 9
9 8.29E-05
5 5.39E-04
6 4.61E-04
7 3.67E-04
8 2.41E-04
3 0.000590512
4 0.0005844
1 0.000228646
2 0.000559573
2
3
4
5
6
2.27E-05
-1
2.90E-05
3.40E-05
4.99E-05
5.55E-05
-2
-3
-4
16.93989E-06
3.66669E-05
7.36419E-05
7.87889E-05
7.73173E-06
X0 = SACtd/SA
0.001801953
13.41904417
SACtd =
X0 =
25
28
Ctd
16
19.5
19
22.5
22
25.5
0.000134283
2
6
7
10.5
11
13.5
14
16.5
4t
9.41341E-07 5t
9.07301E-07 7t
4.59004E-06 8t
6t
1.63866E-05 2t
3.04623E-06 3t
1.24773E-06
1
2c
3c
4c
5c
6c
7c
8c
9
6
7
8
9
10
11
4.04293E-06
1.12873E-05
5.64365E-06
4.55851E-07
1
2
3
4
5
1.34764E-06
3-2
6.82245E-06
3.76243E-06
160.8 2
2
2
2.5
2 -
2.5
2.25641E-06
1.09244E-05
257.4 269.2
2.5
-3
1.95251E-06
23561900
5.30645E-06
4.47463E-06
1.34239E-054.67889E-06
2.66808E-05
1.40367E-05
5.85753E-06
EI(2)=
EI(2.5)=
119282300EI(3)=
57524300
88.65
I(2) = p24/64 = 0.7854
I(2.5) = 1.9175
12.05
24.05
29.55
80.85
209.6
305.3
232.9
15.95
26.9521.45
3.43139E-06 5.14708E-06
I(3) = 3.9761
8.8936E-06 2.05883E-05
SM = 0 = 5.5(3 +9 + 27) + 15(8+20) + 12(21) -Fb(30)
Fb = [5.5(39) + 15(28) +12(21)] / 30 = 29.55
SF = 0 = 5.5(3) + 28 +12 - 29.55 - Fa
\ Fa = 26.95
I = pd4/64
20#
6" 6" 6" 6" 6"
5.5# 5.5#
8#
12# 5.5#
Fa = 26.95# Fb = 29.55#
2" f
2.5" f 3" f2" f
1
23
45
6 7
8
9
5.9 Frecuencia natural de flechas con diámetro variable

30
V 20
10
-10
-20
-30
M
10987654321
7550 4 5 625 2 3
0 125 150 275
4 3
100200300400500600
1 2 3 4 5 6 7 8 9
9 8.29E-05
5 5.39E-04
6 4.61E-04
7 3.67E-04
8 2.41E-04
3 0.000590512
4 0.0005844
1 0.000228646
2 0.000559573
2
3
4
5
6
2.27E-05
-1
2.90E-05
3.40E-05
4.99E-05
5.55E-05
-2
-3
-4
16.93989E-06
3.66669E-05
7.36419E-05
7.87889E-05
7.73173E-06
X0 = SACtd/SA
0.001801953
13.41904417
SACtd =
X0 =
25
28
Ctd
16
19.5
19
22.5
22
25.5
0.000134283
2
6
7
10.5
11
13.5
14
16.5
4t
9.41341E-07 5t
9.07301E-07 7t
4.59004E-06 8t
6t
1.63866E-05 2t
3.04623E-06 3t
1.24773E-06
1
2c
3c
4c
5c
6c
7c
8c
9
6
7
8
9
10
11
4.04293E-06
1.12873E-05
5.64365E-06
4.55851E-07
1
2
3
4
5
1.34764E-06
3-2
6.82245E-06
3.76243E-06
160.8 2
2
2
2.5
2 -
2.5
2.25641E-06
1.09244E-05
257.4 269.2
2.5
-3
1.95251E-06
23561900
5.30645E-06
4.47463E-06
1.34239E-054.67889E-06
2.66808E-05
1.40367E-05
5.85753E-06
EI(2)=
EI(2.5)=
119282300EI(3)=
57524300
88.65
I(2) = p24/64 = 0.7854
I(2.5) = 1.9175
12.05
24.05
29.55
80.85
209.6
305.3
232.9
15.95
26.9521.45
3.43139E-06 5.14708E-06
I(3) = 3.9761
8.8936E-06 2.05883E-05
SM = 0 = 5.5(3 +9 + 27) + 15(8+20) + 12(21) -Fb(30)
Fb = [5.5(39) + 15(28) +12(21)] / 30 = 29.55
SF = 0 = 5.5(3) + 28 +12 - 29.55 - Fa
\ Fa = 26.95
I = pd4/64
20#
6" 6" 6" 6" 6"
5.5# 5.5#
8#
12# 5.5#
Fa = 26.95# Fb = 29.55#
2" f
2.5" f 3" f2" f
1
23
45
6 7
8
95.9 Frecuencia natural de flechas con diámetro variable
Una vez se han determinado las deflexiones, se calculan los valores de:
SWy = 26,000 x 10-6 Lb-Plg SWy2 = 13,400,000 x 10-12 Lb-Plg2
Luego: wn2 = g SWy / SWy2 = 0.755 wn = 870 rad/s
Lo que equivale a nc = 870(60)/2p = 8308 rpm Tarea: Problemas13.21 y 13.23
5.10 Velocidades criticas de mayor orden
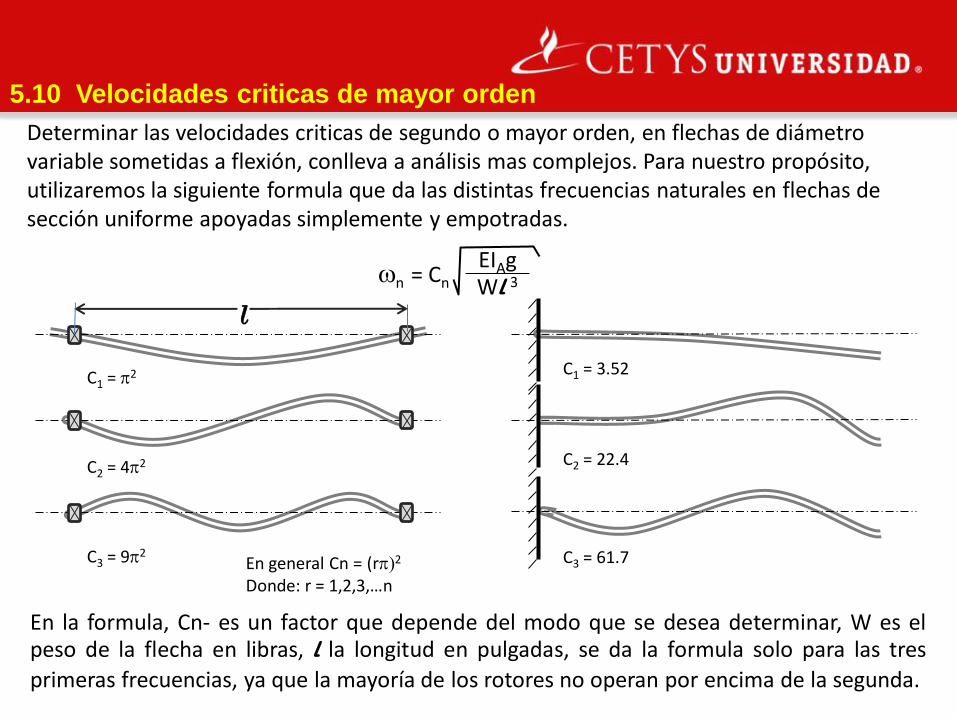
Determinar las velocidades criticas de segundo o mayor orden, en flechas de diámetro variable sometidas a flexión, conlleva a análisis mas complejos. Para nuestro propósito, utilizaremos la siguiente formula que da las distintas frecuencias naturales en flechas de sección uniforme apoyadas simplemente y empotradas.
l
C1 = p2
C2 = 4p2
C3 = 9p2
C1 = 3.52
C2 = 22.4
C3 = 61.7
wn = Cn
EIAgWl 3
En la formula, Cn- es un factor que depende del modo que se desea determinar, W es elpeso de la flecha en libras, l la longitud en pulgadas, se da la formula solo para las tres
primeras frecuencias, ya que la mayoría de los rotores no operan por encima de la segunda.
En general Cn = (rp)2
Donde: r = 1,2,3,…n

5.10 Velocidades criticas de mayor orden
Ejemplos de los primeros modos de vibración en vigas sujetas a flexión y torsión.
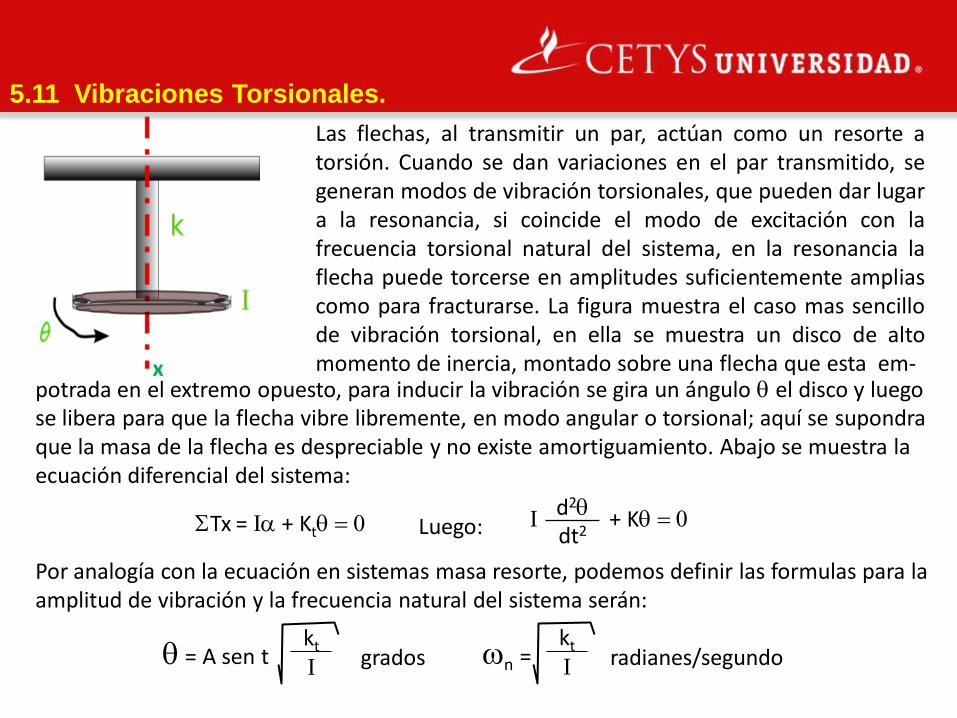
5.11 Vibraciones Torsionales.
Las flechas, al transmitir un par, actúan como un resorte atorsión. Cuando se dan variaciones en el par transmitido, segeneran modos de vibración torsionales, que pueden dar lugara la resonancia, si coincide el modo de excitación con lafrecuencia torsional natural del sistema, en la resonancia laflecha puede torcerse en amplitudes suficientemente ampliascomo para fracturarse. La figura muestra el caso mas sencillode vibración torsional, en ella se muestra un disco de altomomento de inercia, montado sobre una flecha que esta em-
potrada en el extremo opuesto, para inducir la vibración se gira un ángulo q el disco y luego se libera para que la flecha vibre libremente, en modo angular o torsional; aquí se supondraque la masa de la flecha es despreciable y no existe amortiguamiento. Abajo se muestra la ecuación diferencial del sistema:
Luego:
Por analogía con la ecuación en sistemas masa resorte, podemos definir las formulas para la amplitud de vibración y la frecuencia natural del sistema serán:
grados radianes/segundo
STx = Ia + Ktq = 0
x
I + Kq = 0d2q
dt2
kt
Iwn =kt
Iq = A sen t

5.11 Vibraciones Torsionales.
La constante de torsión kt, se define como el par necesario para torcer el extremo de la flecha un ángulo unitario f. De manera que kt = T/f. Para flechas de sección transversal circular f = Tl/GJ, de modo que
kt =GJ/l Pulgadas-Libra/radianDonde:G- es el modulo de rigidez del material; Para el acero, G = 11,500,000 psi y
para el aluminio G = 3,800,000 psi J- es el momento polar de inercia, de la sección transversal J= pd4/32; l– es la longitud de la flecha en pulgadas.I- es el momento de inercia del disco y viene dado por: I = Mr2 = (W/g)r2
Donde: r- es el radio de giro del disco en pulgadas W - es el peso del disco en librasg- es la aceleración de la gravedad = 386 pulgadas/seg2
kt
Iwn =kt
Iq = A sen t
Así, las formulas de vibración torsional para flechas con un disco son:

5.11 Vibraciones Torsionales. Flechas con dos discos
Flechas con dos discos. En la mayoría de los casos los ejes de transmisión transmiten un par de un disco a otro u otros discos, montados en el mismo eje. La figura muestra un caso típico.
l
I1I2
2 1
dnodoPara determinar la frecuencia natural del sistema se considera la condición no rotatoria, se deslaza el disco 1 un ángulo determinado mediante la aplicación de un par, sosteniendo el disco 2 fijo, mediante un par equivalente, al remover los pares
los discos vibraran torsionalmente, con alguna frecuencia natural, la experiencia ha mostrado que las frecuencias de ambos discos son iguales, pero los desplazamientos son de fase opuesta existiendo un plano transversal entre los dos discos que permanece fijo, al que se denomina nodo, la figura abajo muestra el diagrama de cuerpo libre de los dos discos, vistos desde un extremo , cuando la fase del disco 1 es q1 la fase del disco 2 es q2 que afecta al disco 1 por q1 – q2. el par de la flecha que actúa como un resorte en cada uno de los discos es kt (q1 – q2), donde [q1 – q2], es el ángulo que se tuerce la flecha.
q2
q1 - q2Kt(q1 - q2)
Kt(q1 - q2)
q1
2
1
5.11 Vibraciones Torsionales. Flechas con dos discos
Aplicando suma de pares a cada disco, obtendremos su ecuación de movimiento
Suponiendo que los movimientos torsionales de los discos son armónicos, aplican las siguientes soluciones:
Substituyendo en las ecuaciones de movimiento, obtendremos:
Cualquiera de estas dos ecuaciones proporciona la frecuencia natural circular de vibración, aun cuando se pueden conocer I1 e I2 , se desconocen las amplitudes A1 y A2, sin embargo puede observarse que para que se tenga equilibrio en los pares, se debe cumplir que:
Luego:
Por lo tanto: = -
ST = I1a1+ Kt (q1 – q2)= 0 ST = I2a2 – Kt (q1 – q2)= 0
q1 = A1 sen wnt y q2 = A2 sen wnt
Kt ( A1 – A2)I1 A1
wn2 =
Kt ( A2 – A1)I2 A2
wn2 =
I1a1 = - I2a2
- I1A1 wn2 sen wnt = I2A2 wn
2 sen wnt
A1
A2
I2
I1

5.11 Vibraciones Torsionales. Flechas con dos discos
Con lo que se pueden eliminar los términos de la amplitud, y la ecuación de la frecuencia circular natural para flechas con dos discos será:
De donde se puede obtener la frecuencia en Hertz dividiendo esta por 2p. La posición del nodo entre los discos, se puede determinar por triángulos semejantes; de la figura puede
Kt (I1 – I2)I1 I2
wn2 =
l
2 1nodo
l1
l2
A2 = -I1
I2
A1
A1
observarse que la amplitud total de torcimiento es igual a lasuma de las amplitudes A1 y A2, cada una en sentido contrario ala otra. La distribución de los ángulos de torcimiento unitarioses uniformemente a lo largo de la flecha, ya que esta es desección constante. De tal forma que la localización del nodopuede obtenerse por triángulos semejantes. Luego
L1 + (I1/I2)
L1 =
I1
I2
L2
A1
L1
A1
= L2 = L1 (I1/I2) L1 + L2 =L1 [1+(I1/I2)]
5.11 Vibraciones Torsionales. Flechas con dos discos
La frecuencia de excitación, depende no solamente de la velocidad de la flecha, sinotambién del numero de perturbaciones o impulsos que por ciclo recibe la flecha, ejemplode ello se puede dar en un engrane, si este tiene 32 dientes, el numero de impulsos querecibe la flecha por ciclo será 32 y la frecuencia de la excitación generada por el engrane esigual a la velocidad de rotación de la flecha multiplicada por el numero de dientes. En elcaso de una turbina, la frecuencia de excitación generada por la misma, es igual al numerode alabes multiplicado por la velocidad de la flecha; luego:
Frecuencia de excitación = f = N n
Donde:N - Es el numero de alabes o dientes o placas de un estator, yn – Es la velocidad de la flecha en revoluciones por minuto.
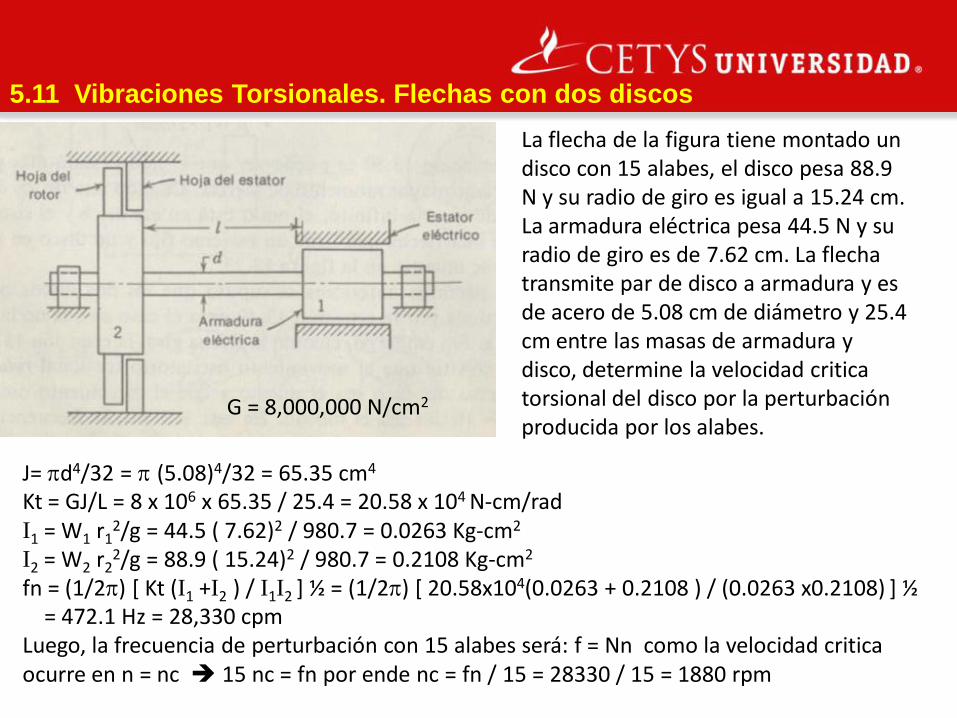
La flecha de la figura tiene montado un disco con 15 alabes, el disco pesa 88.9 N y su radio de giro es igual a 15.24 cm. La armadura eléctrica pesa 44.5 N y su radio de giro es de 7.62 cm. La flecha transmite par de disco a armadura y es de acero de 5.08 cm de diámetro y 25.4 cm entre las masas de armadura y disco, determine la velocidad critica torsional del disco por la perturbación producida por los alabes.
G = 8,000,000 N/cm2
J= pd4/32 = p (5.08)4/32 = 65.35 cm4
Kt = GJ/L = 8 x 106 x 65.35 / 25.4 = 20.58 x 104 N-cm/radI1 = W1 r1
2/g = 44.5 ( 7.62)2 / 980.7 = 0.0263 Kg-cm2
I2 = W2 r22/g = 88.9 ( 15.24)2 / 980.7 = 0.2108 Kg-cm2
fn = (1/2p) [ Kt (I1 +I2 ) / I1I2 ] ½ = (1/2p) [ 20.58x104(0.0263 + 0.2108 ) / (0.0263 x0.2108) ] ½= 472.1 Hz = 28,330 cpm
Luego, la frecuencia de perturbación con 15 alabes será: f = Nn como la velocidad critica ocurre en n = nc 15 nc = fn por ende nc = fn / 15 = 28330 / 15 = 1880 rpm
5.11 Vibraciones Torsionales. Flechas con dos discos
5.12 Vibraciones Torsionales. Flechas escalonadas
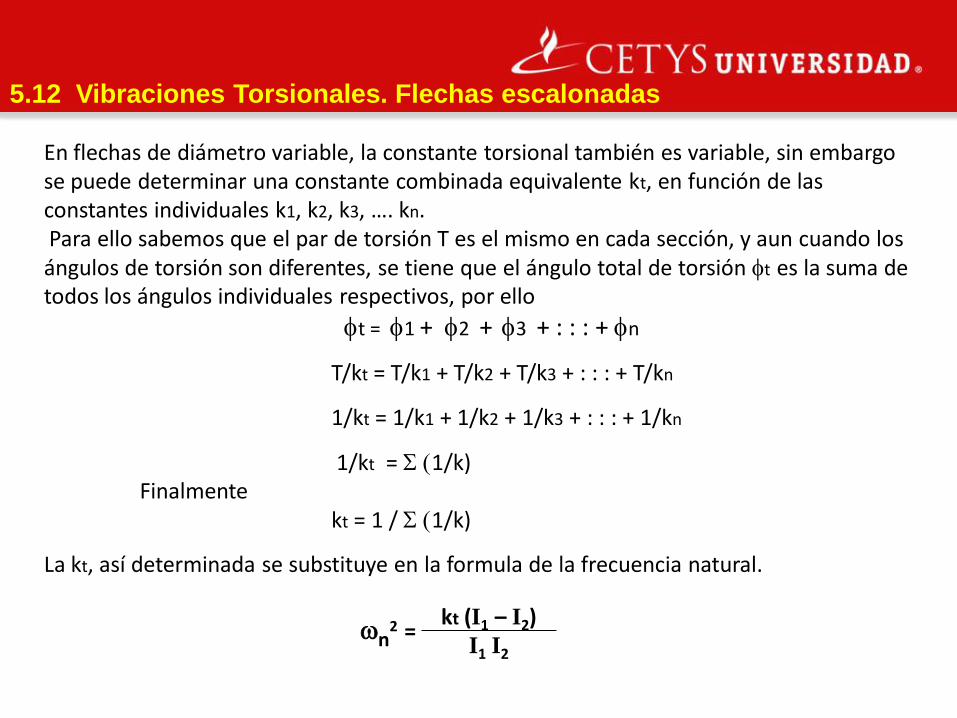
En flechas de diámetro variable, la constante torsional también es variable, sin embargo se puede determinar una constante combinada equivalente kt, en función de las constantes individuales k1, k2, k3, …. kn. Para ello sabemos que el par de torsión T es el mismo en cada sección, y aun cuando los ángulos de torsión son diferentes, se tiene que el ángulo total de torsión ft es la suma de todos los ángulos individuales respectivos, por ello
ft = f1 + f2 + f3 + : : : + fn
T/kt = T/k1 + T/k2 + T/k3 + : : : + T/kn
1/kt = 1/k1 + 1/k2 + 1/k3 + : : : + 1/kn
1/kt = S (1/k) Finalmente
kt = 1 / S (1/k)
La kt, así determinada se substituye en la formula de la frecuencia natural.
kt (I1 – I2)I1 I2
wn2 =

5.13 Vibraciones Torsionales. En engranajes
I1
k1
k2
I2
Engranes La figura muestra un sistema torsional dedos discos, conectados a través de flechasque transmiten par por medio de engranes.Cuando el sistema oscila a su frecuenciatorsional natural, los dos discos se deslizanrelativamente entre si a amplitudes quedependen tanto de la relación de engranaje,como de la torsión de las dos flechas.
Si m es la reducción del engranaje, y el engrane mas pequeño esta montado en la flecha 2,entonces la rotación de la flecha 2 es m veces mayor que la flecha 1 y el par en la flecha 2 es1/m veces el par en la flecha 1. Suponiendo que la inercia de los engranes es despreciable,podemos determinar la frecuencia natural del sistema mediante el uso de un sistemaequivalente mas simple, como el mostrado abajo, mediante ciertas suposiciones.
kt
I2’I1
Primero, la flecha no engranada equivalente debe tener una constante de resorte e inercias equivalentes al sistema real. Ahora supongamos que la rigidez de ambos sistemas es la misma y que la inercia del disco 1 en el sistema equivalente y el real es igual I1. Ahora, si se aplica una aceleración a en la flecha 1 del sistema engranado, entonces,

5.13 Vibraciones Torsionales. En engranajes
…debido a la relación de engranaje la aceleración de la flecha 2 será ma y el par en la flecha 2es I2 ma, es decir, debido a los mismo engranes el par T1 de la flecha 1 es m veces mayor deaquí que: T1 = m(I2 ma) = m2 I2 a
Si se aplica la misma aceleración en el sistema equivalente, el par en la flecha será: T1 = I2’ a
Para que ambos sistemas sean equivalentes, es necesario que los pares en ambas flechas,cerca del disco 1 sean iguales, luego igualando las ecuaciones anteriores:
I2’ a = m2 I2 a
I2’ = m2 I2
Aquí se concluye que en el sistema equivalente, el momento de inercia del disco 2 semultiplica por m2. Veamos ahora que pasa con las constantes de resorte. Si en el sistema realse fija el disco 2 y se aplica un par T al disco 1, entonces el par en la flecha 2 es T/m y eldesplazamiento angular total ft del disco 1 en relación al disco 2 es el ángulo de torsión f1 dela flecha 1 mas el desplazamiento angular f2/m del engrane 1 debido al ángulo de torsión de
la flecha 2, por lo tanto: ft = f1 + f2/mQue en función del par y las constantes de resorte tenemos:
ft = + = + = Tk1
T/mmk2
Tk1
Tm2k2
Tkt
Luego la k equivalente es: kt =1
1/k1 + 1/m2k2
5.13 Vibraciones Torsionales. En engranajes
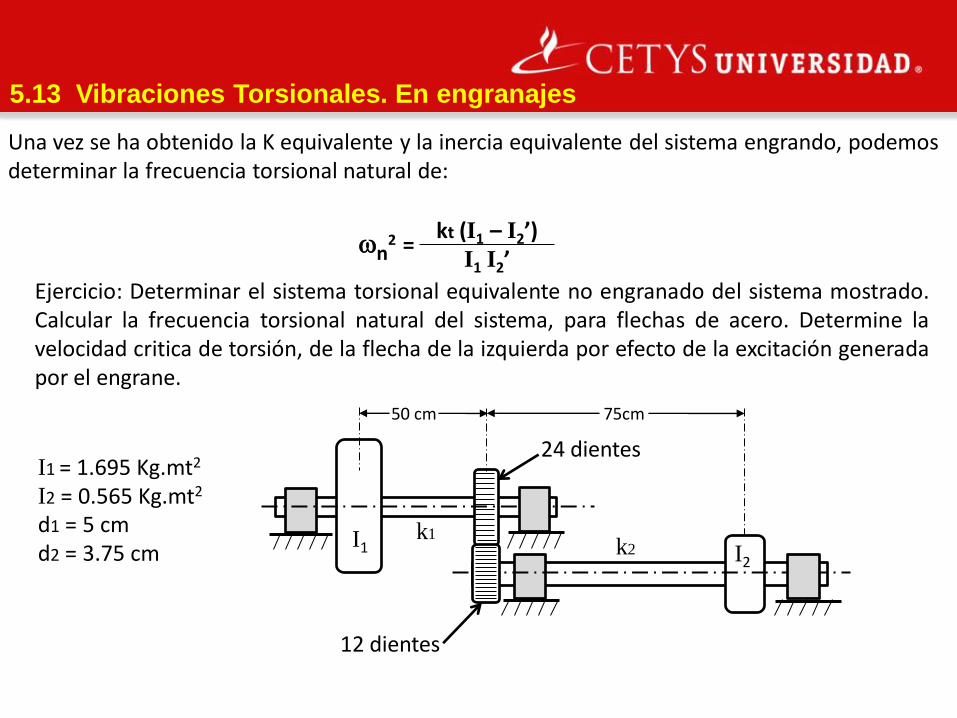
Una vez se ha obtenido la K equivalente y la inercia equivalente del sistema engrando, podemos determinar la frecuencia torsional natural de:
kt (I1 – I2’)I1 I2’
wn2 =
Ejercicio: Determinar el sistema torsional equivalente no engranado del sistema mostrado.Calcular la frecuencia torsional natural del sistema, para flechas de acero. Determine lavelocidad critica de torsión, de la flecha de la izquierda por efecto de la excitación generadapor el engrane.
I1 = 1.695 Kg.mt2
I2 = 0.565 Kg.mt2
d1 = 5 cmd2 = 3.75 cm
I1k1
k2 I2
24 dientes
12 dientes
50 cm 75cm


![Vibraciones unidad 1 b [sistema de resortes]](https://static.fdocuments.co/doc/165x107/58a1503e1a28abbe3c8b50e3/vibraciones-unidad-1-b-sistema-de-resortes.jpg)
















