Universidad de Sevilla -...
102
Universidad de Sevilla Escuela Superior de Ingenieros Departamento de Teoría de la Señal y Comunicaciones PROYECTO FIN DE CARRERA Cálculo de la relación excavación-disco para el diagnóstico precoz de Glaucoma. Realizado por: Manuel Mestre Moreno Titulación: Ingeniero de Telecomunicación Tutora del Proyecto: Irene Fondón García Octubre, 2012
Transcript of Universidad de Sevilla -...

Universidad de Sevilla
Escuela Superior de Ingenieros
Departamento de Teoría de la Señal y Comunicaciones
PROYECTO FIN DE CARRERA
Cálculo de la relación excavación-disco
para el diagnóstico precoz de Glaucoma.
Realizado por: Manuel Mestre Moreno Titulación: Ingeniero de Telecomunicación Tutora del Proyecto: Irene Fondón García
Octubre, 2012

Agradecimientos Quisiera aprovechar esta oportunidad para agradecer a todas esas personas que me han apoyado tanto durante este tiempo. En primer lugar, y como no podía ser de otra forma, agradecer a mis padres todo su apoyo, tanto en los momentos malos como en los menos malos, en los que nunca me han fallado, además de darme la oportunidad de estudiar en España y Brasil, con todo el esfuerzo que eso ha supuesto. Son y serán siempre mis alas para volar. Pero no hay motor sin carburante como no hay alas sin viento, y ellas son lo que me ha empujado en todo momento, mis hermanas Alba y Rocío. Me han abierto los ojos cuando el camino no era recto, un camino que no siempre ha sido fácil, sin embargo su incondicional fe en mí ha estado siempre muy por encima de cualquier traba que haya encontrado. Además, quisiera agradecer a Irene, mi tutora, por ofrecerme este proyecto que me permite culminar la carrera compaginada con la transición al mundo laboral, etapa de mi vida, en la que estoy afrontando nuevos retos. Su entrega, ilusión y su forma tan positiva de ver las cosas han sido la causante de todo lo bueno que haya surgido de él. Por último, pero no por ello menos importante, a mis amigos y por supuesto a mi novia, cuyo amor y amistad me han arropado y comprendido en todo momento. Cada alegría que fue compartida, cada lágrima que fue secada y cada esfuerzo, fue recompensado con todo el amor que supo darme, por eso estaré eternamente agradecido. Gracias a todos.

- 3 -
ÍNDICE DE FIGURAS. - 5 -
CAPÍTULO I. INTRODUCCIÓN. - 7 -
1.- CONTEXTO. - 7 -
2.- OBJETIVOS. - 8 -
3.- ESTRUCTURACIÓN DE LA MEMORIA. - 9 -
CAPÍTULO II: EL OJO HUMANO. - 10 -
1.- ANATOMÍA DEL OJO HUMANO. - 10 -
2.- ENFERMEDADES DE INTERÉS. - 12 -
2.1.- RETINOPATÍA DIABÉTICA. - 12 -
2.1.1.- LESIONES ASOCIADAS A LA RETINOPATÍA DIABÉTICA. - 12 -
2.2.- GLAUCOMA. - 14 -
2.2.1.- Tipos de glaucoma. - 15 -
2.3.- DEGENERACIÓN MACULAR. - 16 -
CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO. - 18 -
1.- MOTIVACIÓN. - 18 -
2.- ESTADO DEL ARTE. - 18 -
3.- ALGORITMO DE SEGMENTACIÓN DEL DISCO ÓPTICO. - 22 -
3.1.- FASE I: OBTENCIÓN DE INFORMACIÓN DE LA IMAGEN Y CENTRO DEL DISCO ÓPTICO - 23 -
3.2.- FASE II: DETECCIÓN DE LOS VASOS SANGUÍNEOS MEDIANTE LA FUNCIÓN MENDONÇA Y POSTERIOR
ELIMINACIÓN. - 27 -
3.2.1.- Detección de los vasos sanguíneos mediante la función Mendonça. - 27 -
3.2.2.- Mejora de los resultados obtenidos. - 29 -
3.2.3.- Eliminación de los vasos sanguíneos. - 30 -
3.3.- FASE III: CONSTRUCCIÓN DEL CONTORNO DEL DISCO ÓPTICO. - 31 -
3.3.1.- Recolección de los puntos candidatos. - 31 -
3.3.2.- Filtrado y reposicionamiento de los puntos de contorno atípicos. - 32 -
3.3.3.- Obtención del contorno del disco mediante contornos activos. - 32 -
3.3.4.- Dinamización de las variables necesarias para la obtención del contorno. - 34 -
CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN - 36 -
1.- MOTIVACIÓN. - 36 -
2.- ESTADO DEL ARTE. - 36 -
3.- ALGORITMO DE SEGMENTACIÓN DEL EXCAVACIÓN. - 37 -
3.1.- FASE I: MÁSCARA DE LA APROXIMACIÓN CIRCULAR DEL DISCO ÓPTICO Y ELIMINACIÓN DE FALSOS
CONTORNOS. - 38 -
3.2.- FASE II: CONSTRUCCIÓN DEL CONTORNO DE LA EXCAVACIÓN. - 38 -
3.2.1.- Distancia de color CIE 94. - 38 -
- 4 -
3.2.2.- Aproximación a una elipse. - 40 -
3.2.3.- Relación de aspecto disco-excavación. - 41 -
CAPÍTULO V: RESULTADOS. - 42 -
1.- RESULTADOS DE LA DETECCIÓN DEL DISCO ÓPTICO Y EXCAVACIÓN. - 42 -
2.- ANÁLISIS ESTADÍSTICO DE LOS RESULTADOS. - 93 -
CAPÍTULO VI: CONCLUSIONES Y LÍNEAS FUTURAS. - 99 -
1.- CONCLUSIONES. - 99 -
2.- LÍNEAS FUTURAS. - 99 -
CAPÍTULO VII: BIBLIOGRAFÍA. - 100 -
REFERENCIAS EN INTERNET. - 101 -

- 5 -
ÍNDICE DE FIGURAS.
CAPÍTULO I. INTRODUCCIÓN. -6-
Figura 1.1: Espacio de color CIE L*a*b*.
CAPÍTULO II: EL OJO HUMANO. -9-
Figura 2.1: Diagrama del ojo.
Figura 2.2: Retinografía que muestra la fóvea, la mácula y el disco óptico.
Figura 2.3: Retinografía con signo de diabetes.
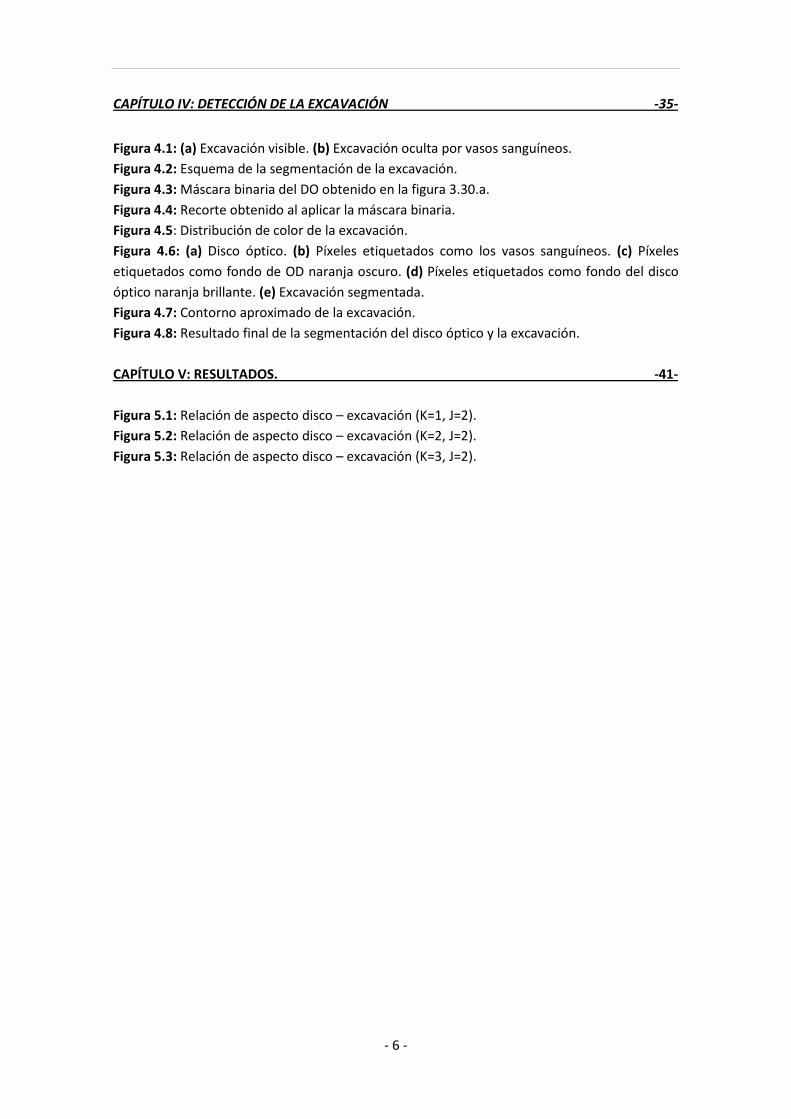
Figura 2.4: Retinopatía diabética en el caso: (a) RDNP. (b) RDP.
Figura 2.5: Imagen vista por una persona con glaucoma.
Figura 2.6: Diferentes relaciones disco-excavación.
Figura 2.7: Imagen vista por una persona con degeneración macular
CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO. -17-
Figura 3.1: Resultados de la transformada de Hough.
Figura 3.2: Orientación de los vasos sanguíneos de la retina.
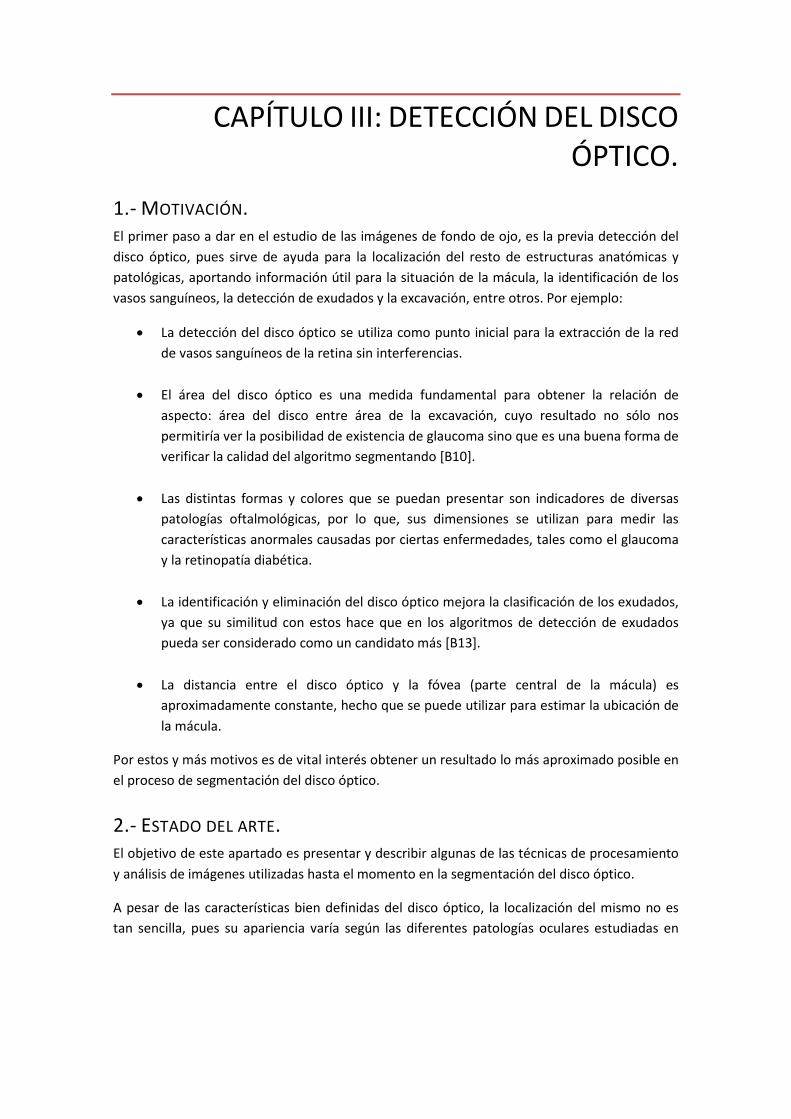
Figura 3.3: (a) Imagen original. (b) Imagen sin red de vasos. (c) Zoom de b. (d) Resultado tras
20 iteraciones. (e) Resultado tras 100 iteraciones.
Figura 3.4: Diagrama del algoritmo propuesto para detectar el disco óptico.
Figura 3.5: Diferentes planos de color en escala de grises. Caso correcto.
Figura 3.6: Diferentes planos de color en escala de grises. Caso incorrecto.
Figura 3.7: (a) Imagen en escala de grises. (b) Promedio de la varianza.
Figura 3.8: (a) Imagen difuminada a partir de 15.a. (b) Histograma de la imagen difuminada
con el umbral elegido para obtener la máscara. (c) Máscara binaria para acotar la búsqueda del
centro. (d) Máscara binaria de falso centro.
Figura 3.9: Centro del disco óptico.
Figura 3.10: Diagrama de flujo del algoritmo.
Figura 3.11: Normalización del fondo de imagen.
Figura 3.12: Candidatos verticales y horizontales.
Figura 3.13: Normalización del fondo de imagen.
Figura 3.14: (a) Detección de los vasos sanguíneos mediante la función Mendonça del plano L.
(b) Red de vasos final suma de (a) y del resultado de Mendonça del plano L ecualizado.
Figura 3.15: Puntos candidatos del disco óptico.
Figura 3.16: (a) Inicialización de la Snake. (b) Progreso de la Snake hasta alcanzar el borde.
Figura 3.17: (a) Resultado del promedio de la varianza. (b) Máscara binaria con umbral del
22%.
Figura 3.18: (a) Resultado con correcto número de iteración Snake. (b) Resultado con
incorrecto número de iteraciones.
- 6 -
CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN -35-
Figura 4.1: (a) Excavación visible. (b) Excavación oculta por vasos sanguíneos.
Figura 4.2: Esquema de la segmentación de la excavación.
Figura 4.3: Máscara binaria del DO obtenido en la figura 3.30.a.
Figura 4.4: Recorte obtenido al aplicar la máscara binaria.
Figura 4.5: Distribución de color de la excavación.
Figura 4.6: (a) Disco óptico. (b) Píxeles etiquetados como los vasos sanguíneos. (c) Píxeles
etiquetados como fondo de OD naranja oscuro. (d) Píxeles etiquetados como fondo del disco
óptico naranja brillante. (e) Excavación segmentada.
Figura 4.7: Contorno aproximado de la excavación.
Figura 4.8: Resultado final de la segmentación del disco óptico y la excavación.
CAPÍTULO V: RESULTADOS. -41-
Figura 5.1: Relación de aspecto disco – excavación (K=1, J=2).
Figura 5.2: Relación de aspecto disco – excavación (K=2, J=2).
Figura 5.3: Relación de aspecto disco – excavación (K=3, J=2).

CAPÍTULO I. INTRODUCCIÓN.
- 7 -
CAPÍTULO I. INTRODUCCIÓN.
1.- CONTEXTO. En el ámbito de la Medicina, el procesamiento de imágenes ha supuesto una mejora en la
identificación de enfermedades y una potente herramienta de ayuda al diagnóstico. La
evolución de la Medicina ha estado a lo largo de la historia muy vinculada al desarrollo
tecnológico, siendo pieza fundamental las imágenes médicas.
Conocemos diferentes tipos de imágenes médicas, dependiendo del lugar y la forma de
realizarla: radiografías, ecografías, mamografías, etc. Nosotros analizaremos el caso de las
imágenes del ojo. Hay que tener en cuenta que la retina es el único lugar del cuerpo humano
en el que pueden visualizarse directamente los vasos sanguíneos mediante métodos no
invasivos, de forma que, pueden ser fotografiados con imágenes digitales para su posterior
análisis. Estas imágenes serán tratadas para la detección de patologías, pues algunos cambios
que se producen en la red vascular y en la retina son síntomas directos de enfermedades [B1]
[B2].
Como línea de investigación, este proyecto se centra en alcanzar una mejoría en los resultados
obtenidos hasta el momento en este campo. El principal interés, es crear un método
automático que permita facilitar la labor al especialista ayudándole y bajo ningún caso
sustituyéndole. Consiguiendo un diagnóstico precoz de enfermedades que a simple vista
podrían no ser detectadas.
El tratamiento digital de imágenes médicas es capaz de mejorar la visualización así como de
facilitar la interpretación. Con la imagen tratada, se puede realizar un análisis mucho más
amplio y certero que con la imagen original.
Otro factor de interés es la digitalización de las imágenes, con lo que se consigue un mejor
almacenamiento, de este modo se facilita compartir datos en red dándose grandes
posibilidades como exposición de casos, segundas opiniones, etc...
A todo esto añadiremos el ahorro de tiempo, por ejemplo viendo el período empleado en un
paciente y teniendo en cuenta que de media el algoritmo tiene una tardanza de unos 90
segundos, el ahorro sería significativo, si además tenemos en cuenta que ese tiempo ahorrado
puede ser empleado para revisar los datos con más detenimiento, podemos afirmar que estos
algoritmos son una excelente herramienta para corroborar los resultados obtenidos en los
diagnósticos.

CAPÍTULO I. INTRODUCCIÓN.
- 8 -
2.- OBJETIVOS. El estudio de las lesiones y anomalías de la retina en imágenes de fondo de ojo contribuye a un
mejor diagnóstico. En el proceso de análisis de estas patologías se deben localizar e identificar
las principales estructuras oculares, entre ellas, el disco óptico, la red de vasos sanguíneos y la
excavación.
El disco óptico es considerado como un componente clave en el diseño de los algoritmos de
extracción de las estructuras anatómicas y las lesiones oculares, pues sirve como punto de
referencia para otras características del fondo de ojo, tales como la mácula, los exudados y la
red vascular.
Además, la detección del disco óptico es el primer paso en el diagnóstico precoz del glaucoma
[B3] y la retinopatía diabética [B4][I8].
Por otro lado, los vasos sanguíneos adquieren también importancia en muchas imágenes
oftalmológicas. En algunas aplicaciones, los vasos son el principal interés de la imagen,
mientras que en otros casos, se limitan a obstruir el área observada. También, como ocurre
con el disco óptico, se pueden utilizar como puntos de referencia, por ejemplo, en los métodos
de registro. En cualquier caso, una detección adecuada es crucial [B5].
Finalmente es interesante tener un algoritmo de segmentación de la excavación, ya que con
ello podemos obtener la proporción excavación-disco, que es una medida usada en
oftalmología y optometría para evaluar la progresión del glaucoma. La proporción de
excavación-disco compara el diámetro de la excavación con el diámetro total del disco óptico.
Una proporción de excavación-disco grande puede implicar glaucoma. Sin embargo, la
dilatación de la excavación por sí misma no es indicativa de glaucoma. Excavación profunda
pero estable puede ocurrir debido a factores hereditarios sin el glaucoma.
Figura 1.1: Espacio de color CIE L*a*b*. [I3]

CAPÍTULO I. INTRODUCCIÓN.
- 9 -
En concreto, el objetivo de este proyecto es la localización de los vasos sanguíneos en
retinografias, para lo que se parte del Proyecto Fin de Carrera Detección de vasos en imágenes
de fondo de ojo [B6]. Detección del disco óptico. Se consigue mediante la implementación de
un algoritmo basado fundamentalmente en el artículo Screening of Diabetic Retinopathy -
Automatic Segmentation of Optic Disc in Colour Fundus Images [B8] pero cambiando el espacio
de color de RGB a CIE L*a*b* (figura 1.1). Como se verá más adelante este cambio pretende
una mejor adaptación a la percepción humana de los colores. Segmentación de la excavación.
Se emplea el algoritmo presentado en el artículo Automatic cup-to-disc ratio estimation using
active contours and color clustering in fundus images for glaucoma diagnosis [B10].
3.- ESTRUCTURACIÓN DE LA MEMORIA. En el capítulo I se ha realizado una breve introducción al tratamiento digital de imágenes y a su
utilidad en el diagnóstico médico. Además, se han comentado los objetivos que se pretenden
conseguir con la realización de este Proyecto Fin de Carrera, posteriormente analizados en el
capítulo VI.
El capítulo II hace un resumen didáctico del ojo humano y comenta las enfermedades que
pueden estar relacionadas con la finalidad de este proyecto.
En el capítulo III y IV se definen las pautas seguidas en el proceso de segmentación del disco
óptico y de la excavación, los modelos empleados anteriormente y la importancia de la
detección de estos.
El capítulo V muestra y analiza los resultados en imágenes de prueba comparándose
analíticamente con los obtenidos en otros métodos de segmentación.
En el capítulo VI se comentan las conclusiones del estudio realizado. Además, se añaden
posibles líneas futuras de investigación que permitan mejorar y completar los resultados
obtenidos en futuros proyectos.
Por último se adjunta la bibliografía mencionada a lo largo de toda la memoria así como las
referencias empleadas sobre internet.

CAPÍTULO II: EL OJO HUMANO.
1.- ANATOMÍA DEL OJO HUMANO. El ojo, también llamado globo ocular, es un órgano esférico de aproximadamente 2,5 cm de
diámetro, que detecta la luz y es la base del sentido de la vista. En la figura 2.1 puede
observarse un diagrama del mismo.
Figura 2.1: Diagrama del ojo [I1].
Su anatomía puede dividirse en una pared exterior y un contenido interno.
La pared exterior del ojo en su porción posterior está configurada por la esclerótica. Esta
porción blanca de la pared ocular tiene una función protectora y corresponde a los cinco
sextos de la superficie ocular. La porción anterior de la pared está configurada por la córnea
que es la capa transparente que permite la entrada de los rayos luminosos al interior del ojo.
Por detrás, hay un espacio lleno de un líquido claro (el humor acuoso) que separa la córnea de
la lente del cristalino [I1].
La capa media o úvea tiene a su vez tres diferentes partes: la coroides es una capa vascular,
reviste las tres quintas partes posteriores del globo ocular. Se continúa hacia delante con el
cuerpo ciliar, y a continuación queda el iris, que se extiende por la parte frontal del ojo. La
coroides por ser una capa vascularizada se encarga de dar nutrición a la retina. El cuerpo ciliar

CAPÍTULO II. EL OJO HUMANO.
- 11 -
se encarga de producir el líquido que llena la cámara anterior, el humor acuoso. El iris que da
el color a los ojos, además se encarga de regular la cantidad de luz que entra al ojo y así
permitir ver bien en diferentes condiciones de iluminación. La abertura central del iris es la
pupila.
La retina es la capa más interna. Es compleja, compuesta sobre todo por células nerviosas. Las
células receptoras sensibles a la luz se encuentran en su superficie exterior delante de una
capa de tejido pigmentado. Estos fotorreceptores se llaman conos y bastones, y son sensibles a
diferentes tipos de luz. La retina en el centro tiene una pequeña mancha amarilla, llamada
mácula lútea; dentro de la cual se encuentra la fóvea, la zona del ojo con mayor agudeza
visual. La capa sensorial de la fóvea se compone sólo de células con forma de conos, mientras
que en torno a ella también se encuentran células con forma de bastones. Según nos alejamos
del área sensible, las células con forma de cono se vuelven más escasas y en los bordes
exteriores de la retina sólo existen las células con forma de bastones [I1].
Figura 2.2: Retinografía que muestra la fóvea, la mácula y el disco óptico [B11].
En el interior, detrás del iris está el cristalino. Es un lente con forma de esfera aplanada
constituida por un gran número de fibras transparentes dispuestas en capas. Está ligado al
músculo ciliar, que tiene forma de anillo y lo rodea mediante unos ligamentos. El músculo ciliar
y los tejidos circundantes forman el cuerpo ciliar y esta estructura aplana o redondea el lente,
cambiando su capacidad de enfocar objetos situados a diferentes distancias.
Por detrás del cristalino, el ojo está lleno de una sustancia transparente y gelatinosa llamada
cuerpo vítreo. La presión del vítreo mantiene distendido el globo ocular.
El nervio óptico, se encarga a través de las múltiples fibras que lo conforman de enviar la
información visual desde el ojo hacia el cerebro.

CAPÍTULO II. EL OJO HUMANO.
- 12 -
2.- ENFERMEDADES DE INTERÉS. De entre las posibles enfermedades que pueden detectarse a través del estudio del fondo de
ojo, destacan la retinopatía diabética, el glaucoma y la degeneración macular. Realizaremos un
pequeño paso por cada una de ellas, centrándonos en el interesante dentro de este proyecto,
el glaucoma.
2.1.- RETINOPATÍA DIABÉTICA.
La retinopatía diabética es la enfermedad ocular diabética más común, ocurre cuando hay
cambios en los vasos sanguíneos en la retina. A veces, estos vasos pueden hincharse y dejar
escapar fluidos, o inclusive taparse completamente. En otros casos, nuevos vasos sanguíneos
anormales crecen en la superficie de la retina [I6].
Generalmente, la retinopatía diabética afecta a ambos ojos. Las personas con retinopatía
diabética a menudo no se dan cuenta de los cambios en su visión durante las primeras etapas
de la enfermedad. Pero a medida que avanza, causa una pérdida de visión que en muchos
casos no puede ser revertida.
Figura 2.3: Retinografía con signos de diabetes. [I6]
2.1.1.- Lesiones asociadas a la retinopatía diabética.
Existen dos tipos de retinopatía diabética [I6]:
a) De fondo o retinopatía diabética no proliferativa (RDNP). La retinopatía diabética no
proliferativa (RDNP) es la etapa más temprana de la retinopatía diabética. Cuando existe esta
condición, los vasos sanguíneos deteriorados permiten un escape de fluidos de sangre dentro
del ojo.
La RDNP puede causar cambios en los ojos, incluyendo:
• Microaneurismas: Unas pequeñas protuberancias en los vasos sanguíneos de la
retina que con frecuencia dejan escapar líquidos.
• Hemorragias de la retina: Unas pequeñas manchas de sangre que entran a la retina.

CAPÍTULO II. EL OJO HUMANO.
- 13 -
• Exudados macular: Es la inflamación o engrosamiento de la mácula a causa de escapes de líquido de los vasos sanguíneos de la retina. La mácula no funciona correctamente cuando está inflamada. El edema macular es la causa más común de pérdida de la visión durante la diabetes.
• Isquemia macular: Los pequeños vasos sanguíneos (capilares) se cierran o se tapan.
Su visión se torna borrosa ya que la mácula no recibe suficiente sangre para funcionar correctamente.
b) La retinopatía diabética proliferativa (RDP) sucede principalmente cuando muchos de
los vasos sanguíneos de la retina se tapan, impidiendo un flujo suficiente de la sangre. En un
intento de suministrar sangre a la zona donde los vasos originales se han tapado, la retina
responde creando nuevos vasos sanguíneos. Este proceso se llama neovascularización. Sin
embargo, los nuevos vasos sanguíneos también son anormales y no proporcionan a la retina el
flujo sanguíneo adecuado. A menudo, los nuevos vasos van acompañados por tejidos
cicatrizados que pueden hacer que la retina se arrugue o se desprenda.
La RDP puede causar una pérdida de la visión más severa que la RDNP, ya que puede afectar
tanto la visión central como la periférica. La RDP afecta la visión de las siguientes maneras:
• Hemorragia vítrea: Los nuevos y delicados vasos sanguíneos sangran dentro del vítreo,
previniendo que los rayos de luz lleguen a la retina. Si la hemorragia es pequeña, es
posible que ver algunas nuevas manchas oscuras y flotantes. Una hemorragia muy
grande puede bloquear la visión, permitiéndole sólo ver la diferencia entre claro y
oscuro. Una hemorragia vítrea por sí sola no causa una pérdida de visión permanente.
Una vez que la sangre desaparece, la visión puede volver a su estado anterior, a menos
que la mácula se haya dañado.
• Desprendimiento de la retina por tracción: Cuando el tejido de una cicatriz producida
por una neovascularización se encoge, la retina se arruga y puede desprenderse de su
posición normal. Estas arrugas maculares pueden distorsionar la visión. Pérdida de la
visión más grave pueden ocurrir si la mácula o áreas grandes de la retina se
desprenden.
• Glaucoma neovascular: Si una serie de vasos de la retina se cierran. Cuando esta
condición existe, los nuevos vasos sanguíneos pueden bloquear el flujo normal de
líquido en el ojo. La presión en el ojo aumenta, lo que presenta una condición
particularmente grave que causa daños al nervio óptico.
Las lesiones mencionadas en los dos casos pueden observarse de forma esquemática en la
figura 2.4.
CAPÍTULO II. EL OJO HUMANO.
- 14 -
(a) (b)
Figura 2.4: Retinopatía diabética en el caso: (a) RDNP. (b) RDP [I7].
2.2.- GLAUCOMA.
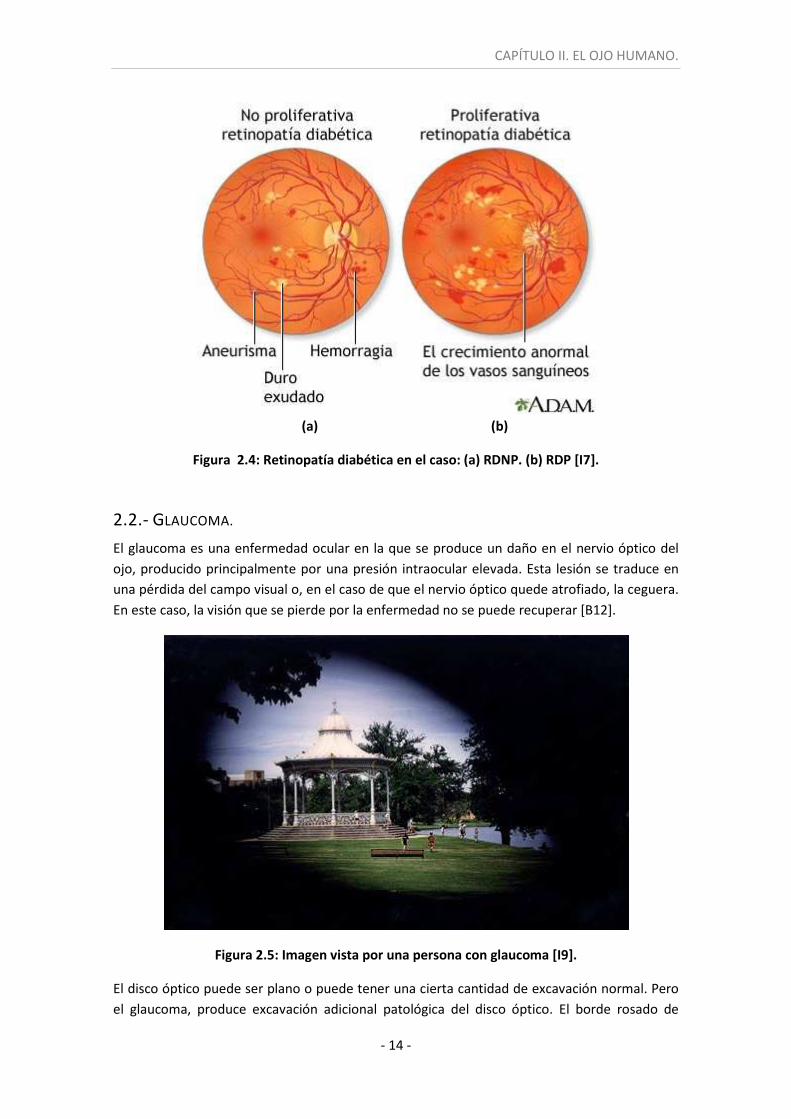
El glaucoma es una enfermedad ocular en la que se produce un daño en el nervio óptico del
ojo, producido principalmente por una presión intraocular elevada. Esta lesión se traduce en
una pérdida del campo visual o, en el caso de que el nervio óptico quede atrofiado, la ceguera.
En este caso, la visión que se pierde por la enfermedad no se puede recuperar [B12].
Figura 2.5: Imagen vista por una persona con glaucoma [I9].
El disco óptico puede ser plano o puede tener una cierta cantidad de excavación normal. Pero
el glaucoma, produce excavación adicional patológica del disco óptico. El borde rosado de

CAPÍTULO II. EL OJO HUMANO.
- 15 -
disco contiene fibras de nervio, sin embargo para detectar la excavación tendremos que
observar que existe un hoyo sin fibras de nervio, pues bien, como avances de glaucoma, la
excavación se amplía hasta ocupe la mayor parte del área que tiene el disco óptico.
Figura 2.6: Diferentes relaciones disco-excavación. [I4]
2.2.1.- TIPOS DE GLAUCOMA.
Hay dos formas principales de glaucoma: de ángulo abierto (la forma más común que afecta a
aproximadamente el 95% de los individuos) y de ángulo cerrado. También hay otras formas de
glaucoma, incluyendo la de tensión normal, congénita, juvenil y secundaria [I8].
• Glaucoma de ángulo abierto, es progresiva y se caracteriza por daño al nervio óptico.
El factor de riesgo más importante para el desarrollo y avance de esta forma es la alta
presión del ojo. Inicialmente, y por lo general no hay síntomas, pero la presión del ojo
gradualmente crece, y en algún momento, el nervio óptico se deteriora, y se pierde la
visión periférica. Sin tratamiento, una persona puede quedar totalmente ciega.
• Glaucoma de ángulo cerrado puede ser aguda o crónica. Con glaucoma agudo de
ángulo cerrado el flujo normal del líquido del ojo (humor acuoso) entre el iris y el
cristalino es de repente bloqueado. Los síntomas pueden incluir dolor severo, náuseas,
vómitos, visión borrosa y hasta ver un halo del arco iris alrededor de las luces. El
glaucoma agudo de ángulo cerrado es una emergencia médica y debe ser tratado de
inmediato o la ceguera podría resultar en uno o dos días. El glaucoma crónico de
ángulo cerrado progresa más lentamente y pueden dañar el ojo sin síntomas, similares
al glaucoma de ángulo abierto.
CAPÍTULO II. EL OJO HUMANO.
- 16 -
• Glaucoma de tensión normal o de baja tensión se produce cuando la presión del ojo es
normal, sin embargo, el nervio óptico se daña y se pierde la visión periférica.
Reduciendo la presión del ojo por lo menos el 30 por ciento a través de la medicación
a veces frena el progreso de la enfermedad, pero este tipo de glaucoma puede
empeorar a causa de la presión baja. Un historial médico detallado puede ayudar a
identificar otros posibles factores de riesgo, como la presión arterial baja, que
contribuyen al glaucoma de baja tensión. Si no existen otros factores de riesgo, el
tratamiento es el mismo que se usa para el glaucoma de ángulo abierto.
• Glaucoma congénito afecta a los bebés que nacen con defectos que impiden el drenaje
normal del líquido del ojo.
• Glaucoma juvenil es el glaucoma de ángulo abierto que afecta a los niños, los
adolescentes y los adultos jóvenes.
• Glaucoma secundario puede ser de ángulo abierto o de ángulo cerrado, y es el
resultado de alguna otra condición médica en el ojo o en el organismo.
2.4.- DEGENERACIÓN MACULAR.
La degeneración macular relacionada con la edad (DMRE) es una lesión o colapso de la
mácula. La mácula es un área pequeña en la retina (un tejido sensible a la luz que recubre la
parte posterior del ojo), responsable de la visión central, la cual permite ver detalles finos
claramente [I6].
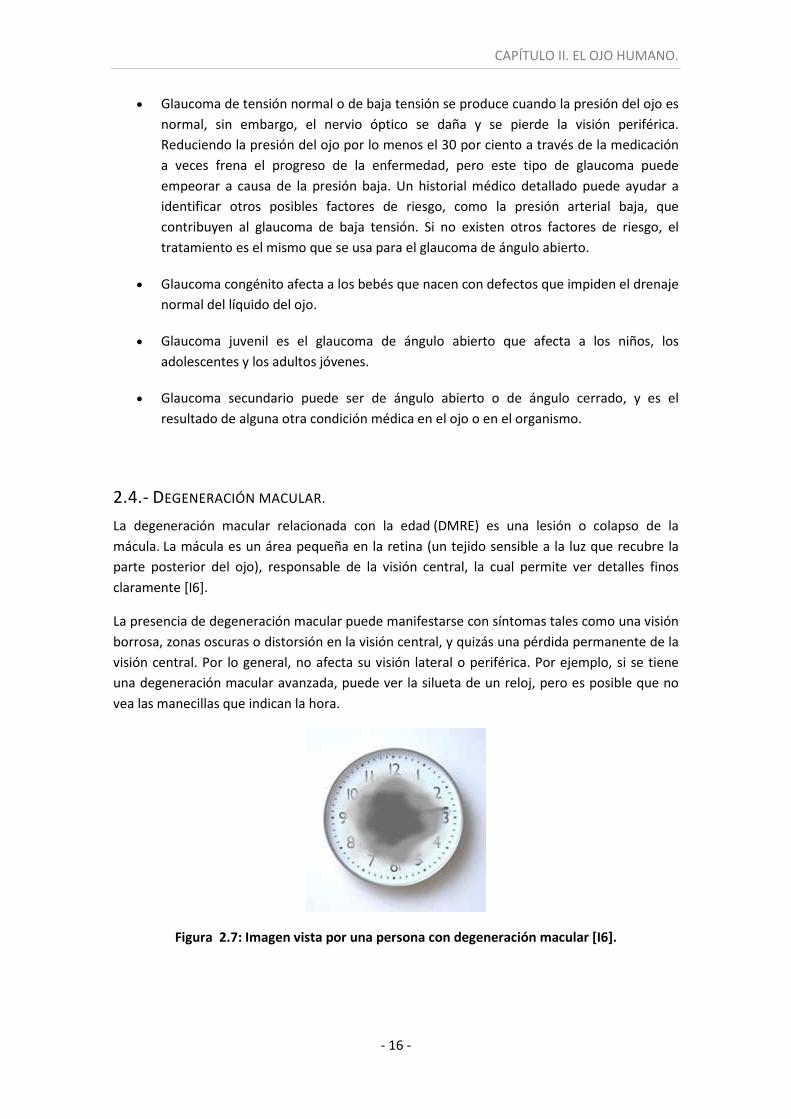
La presencia de degeneración macular puede manifestarse con síntomas tales como una visión
borrosa, zonas oscuras o distorsión en la visión central, y quizás una pérdida permanente de la
visión central. Por lo general, no afecta su visión lateral o periférica. Por ejemplo, si se tiene
una degeneración macular avanzada, puede ver la silueta de un reloj, pero es posible que no
vea las manecillas que indican la hora.
Figura 2.7: Imagen vista por una persona con degeneración macular [I6].
CAPÍTULO II. EL OJO HUMANO.
- 17 -
2.4.1.- Tipos de degeneración macular.
Los dos tipos más comunes de degeneración macular [I2] debida al envejecimiento son la
"seca" y la "húmeda".
• Degeneración macular “seca” (atrófica).
La degeneración macular seca se produce cuando las células de la mácula sensibles a la
luz se van deteriorando lentamente, haciendo que la visión central se nuble
gradualmente en el ojo afectado.
• Degeneración macular “húmeda” (exudativa).
La degeneración macular húmeda ocurre cuando se crean vasos sanguíneos anormales
detrás de la retina que comienzan a crecer debajo de la mácula. Estos nuevos vasos
tienden a ser muy frágiles y frecuentemente gotean sangre y otros líquidos, que
levantan la mácula de su lugar normal en el fondo del ojo, dañándola rápidamente.
CAPÍTULO III: DETECCIÓN DEL DISCO
ÓPTICO.
1.- MOTIVACIÓN. El primer paso a dar en el estudio de las imágenes de fondo de ojo, es la previa detección del
disco óptico, pues sirve de ayuda para la localización del resto de estructuras anatómicas y
patológicas, aportando información útil para la situación de la mácula, la identificación de los
vasos sanguíneos, la detección de exudados y la excavación, entre otros. Por ejemplo:
• La detección del disco óptico se utiliza como punto inicial para la extracción de la red
de vasos sanguíneos de la retina sin interferencias.
• El área del disco óptico es una medida fundamental para obtener la relación de
aspecto: área del disco entre área de la excavación, cuyo resultado no sólo nos
permitiría ver la posibilidad de existencia de glaucoma sino que es una buena forma de
verificar la calidad del algoritmo segmentando [B10].
• Las distintas formas y colores que se puedan presentar son indicadores de diversas
patologías oftalmológicas, por lo que, sus dimensiones se utilizan para medir las
características anormales causadas por ciertas enfermedades, tales como el glaucoma
y la retinopatía diabética.
• La identificación y eliminación del disco óptico mejora la clasificación de los exudados,
ya que su similitud con estos hace que en los algoritmos de detección de exudados
pueda ser considerado como un candidato más [B13].
• La distancia entre el disco óptico y la fóvea (parte central de la mácula) es
aproximadamente constante, hecho que se puede utilizar para estimar la ubicación de
la mácula.
Por estos y más motivos es de vital interés obtener un resultado lo más aproximado posible en
el proceso de segmentación del disco óptico.
2.- ESTADO DEL ARTE. El objetivo de este apartado es presentar y describir algunas de las técnicas de procesamiento
y análisis de imágenes utilizadas hasta el momento en la segmentación del disco óptico.
A pesar de las características bien definidas del disco óptico, la localización del mismo no es
tan sencilla, pues su apariencia varía según las diferentes patologías oculares estudiadas en

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 19 -
apartados anteriores. Por ello, existen multitud de métodos para su localización y detección1
[B14] [B15].
A continuación, se citan algunos métodos de localización y detección del disco óptico
clasificado según las técnicas que utilizan para tal efecto.
• Transformada de Hough.
La transformada de Hough localiza formas geométricas dentro de una imagen; de ahí que
algunos autores [B14] [B9] utilicen esta transformada para obtener el contorno deseado.
Como el disco óptico suele presentar una forma circular, el resultado de esta aproximación no
sería del todo erróneo.
Aun así los resultados obtenidos no son muy realistas, ya que esta estimación no es válida en
todos los casos, sobre todo en aquellos en los que aparece alguna patología y la forma que
adquiere el disco no es tan perfecta, como por ejemplo el caso de la diabetes. Además, el
resultado de esta transformada se ve muy afectada por la resolución de la imagen.
Figura 3.1: Resultados de la transformada de Hough [B14]
1 Localización sólo sitúa correctamente el centroide del disco óptico; mientras que, la detección tiene como objetivo obtener el contorno del mismo.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 20 -
• Patrón direccional de los vasos sanguíneos.
Como hemos visto anteriormente, para la detección del disco óptico únicamente nos hemos
basado en su localización o detección por las formas geométricas que se presentaban en la
imagen, sin embargo este método se basa en el patrón direccional de los vasos sanguíneos
(figura 3.2) que salen del centro del disco óptico.
Figura 3.2: Orientación de los vasos sanguíneos de la retina [B14].
Este algoritmo [B14] consigue un mapa con las direcciones de los vasos mediante un filtro
adaptado gaussiano que se compara con el patrón esperado de los vasos próximos al disco. En
el punto en el que existe un mínimo de diferencia de los mapas, se considera el centro del
disco.
El principal problema de este método es que sólo obtiene la localización del disco sin llegar a
detectar su contorno.
• Contornos activos.
Este tipo de detección permite extraer los contornos de los objetos de interés basándose en un
modelo de contorno activo denominado Snake. Una Snake es un conjunto de puntos colocado
en un primer momento cerca del contorno de interés, que poco a poco va acercándose más a
la forma exacta de la sección que quiere ser segmentada. Esto se realiza a través de la
minimización iterativa de una función de energía.
CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 21 -
Figura 3.3: (a) Imagen original. (b) Imagen sin red de vasos. (c) Zoom de b. (d) Resultado tras
20 iteraciones. (e) Resultado tras 100 iteraciones. [B4]
Los resultados de este procedimiento permite no solo localizar sino también determinar el
contorno, la mayor limitación de este método se encuentra en el umbral de iteraciones que
fijado a priori determinará con mayor o menor exactitud el disco óptico, es por ello que
añadiremos como mejora respecto a otros proyectos la automatización de este parámetro.
• Métodos basados en la velocidad de cambio del perfil de intensidad en el borde del disco
óptico.
Este método [B7] detecta el contorno del disco óptico en imágenes de fondo de ojo,
indistintamente de su forma y posición, sin realizar una simple aproximación. Se basa en el
artículo publicado por Lee et al. [B8], el cual tiene en cuenta la rapidez con la que varía el perfil
de intensidad en el borde del disco. Dado el centro del disco óptico, se utiliza ese perfil para
realizar una primera aproximación del borde, que se mejora mediante técnicas de detección
de contornos activos.
Veremos a continuación su funcionamiento, pues este proyecto se fundamenta en él. Como
adelanto, cabe destacar que uno de los inconvenientes de ese proyecto se encuentra en la
elección de los planos de color a utilizar, ya que los planos clásicos (RGB) a pesar de ofrecer
diferente información acerca de las estructuras anatómicas en las imágenes de fondo de ojo,
no son uniformes con lo que no están adaptados a la percepción humana, algo que si podemos
confirmar con el espacio de color CIE L*a*b*.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 22 -
3.- ALGORITMO DE SEGMENTACIÓN DEL DISCO ÓPTICO. El método propuesto se puede dividir en tres fases diferenciadas:
o I: Obtención de información de la imagen y centro del disco óptico.
o II: Detección de los vasos sanguíneos mediante la función Mendonça [B6] y posterior
eliminación.
o III: Construcción del contorno del disco óptico.
- Puntos candidatos.
- Filtrado y reposicionamiento de los puntos de contorno atípicos.
- Obtención del contorno del disco mediante contornos activos.
- Dinamización de las variables necesarias para la obtención del contorno.
Esquemáticamente, el resultado sería el siguiente (figura 3.4).
Figura 3.3: Diagrama del algoritmo propuesto para detectar el disco óptico.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 23 -
3.1.- FASE I: OBTENCIÓN DE INFORMACIÓN DE LA IMAGEN Y CENTRO DEL DISCO
ÓPTICO
Como se observa en la figura 3.5, en el plano rojo, el disco óptico aparece como la región de
mayor intensidad, con los bordes bien definidos. En el plano verde, los vasos sanguíneos se
observan con un mayor contraste con respecto al fondo de la retina; mientras que, la región
que se corresponde con el disco puede no coincidir con el borde real en algunas ocasiones. Por
último, el plano azul muestra una imagen con bajo contraste, insuficiente para detectar el
disco o los vasos. Consecuentemente, se elegiría el plano rojo para la detección del disco
óptico y el verde, para la de los vasos sanguíneos. Sin embargo, en muchas imágenes se
observa una saturación de ambos canales que lleva irremediablemente a un fallo del
algoritmo, como podemos ver en la figura 3.6. Por eso, se busca otro plano que no sature
aunque a cambio se pierda contraste. Elegimos el plano L* por estar adaptado a la percepción
humana de la luminosidad mejor que cualquier otro plano de cualquier otro espacio como V
de HSV, I de HSI, etc. Además esta elección nos permite elaborar un algoritmo elegante, pues
permite el posterior uso de la información de color al completo sin estar saltando de espacio
en espacio.
Figura 3.5: Diferentes planos de color en escala de grises. Caso correcto.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 24 -
Figura 3.6: Diferentes planos de color en escala de grises. Caso incorrecto.
Una vez elegido el plano L* como base del algoritmo, se procede a la localización del centroide
del disco óptico. Para ello no buscaremos el punto exacto, solamente será necesario que se
encuentre dentro de la región del disco óptico. Este algoritmo está fundamentado en el
desarrollado por Sinthanayothin et al. [B15], con el que se consiguen resultados de forma
rápida y con buena calidad.
Para la localización se usa la rápida variación de la intensidad producida en la zona del disco
óptico, ya que de ella parten dos estructuras con características muy diferentes entre sí: los
oscuros vasos sanguíneos y los brillantes nervios ópticos. La medida de esta variación entre
píxeles vecinos se obtiene calculando el promedio de la varianza de la imagen. De esta forma,
el máximo de ese promedio que se encuentre dentro del área del disco óptico, es el centro de
dicho disco, como se puede apreciar en la figura 3.7.
La varianza de la imagen centrada en el pixel (i,j) es:
���, �� �� �� �� ��� (1)
Donde la función � �� se define como el promedio de la intensidad calculado a partir de la
ventana V(i,j).

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 25 -
Figura 3.7: (a) Imagen en escala de grises. (b) Promedio de la varianza.
Por otro lado y para concretar la búsqueda, se crea una máscara binaria, cuyo objetivo es
eliminar los falsos centros que se pueden localizar fuera del área buscada. Como se observa en
la figura anterior, los bordes de la imagen presentan la máxima variación de contraste y deben
ser descartados para evitar una localización errónea del centroide.
Para obtener la máscara, en primer lugar, se difumina la imagen original mediante un filtro de
media con una ventana de tamaño igual a la del área del disco y, posteriormente, se umbraliza
esa imagen difuminada. La umbralización se realiza teniendo en cuenta que los píxeles
pertenecientes al disco óptico tienen valores de intensidad muy altos con respecto al resto de
la imagen, por tanto, se toma como umbral el máximo que adquiere la imagen difuminada
ponderado al 90%. Los valores típicos que toma ese umbral oscilan entre 0.5 y 0.65 (expresado
en tanto por uno).

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 26 -
(c) (d)
Figura 3.8: (a) Imagen difuminada a partir de 15a. (b) Histograma de la imagen difuminada
con el umbral elegido para obtener la máscara. (c) Máscara binaria para acotar la búsqueda
del centro. (d) Máscara binaria de falso centro.
La figura 3.8.d es un caso especial que añadimos para ver el problema que tiene la
ponderación del 90%, que a veces no es suficientemente alto (en este caso) y otras veces es
excesivamente elevado. A pesar de ello el resultado del centro apenas se ve afectado, pues el
máximo del promedio de la varianza de la máscara resultante siempre se encuentra en la zona
del disco óptico como vemos en la figura 3.9.
Figura 3.9: Centro del disco óptico.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 27 -
3.2.- FASE II: DETECCIÓN DE LOS VASOS SANGUÍNEOS MEDIANTE LA FUNCIÓN
MENDONÇA Y POSTERIOR ELIMINACIÓN.
3.2.1.- DETECCIÓN DE LOS VASOS SANGUÍNEOS MEDIANTE LA FUNCIÓN MENDONÇA.
La identificación de los vasos se realiza sobre el plano L* de la imagen mediante la función Mendonça [B6]. El método que se presenta puede describirse de forma esquemática mediante el diagrama de bloques de la figura 3.10, donde se identifican 3 fases principales:
Figura 3.10: Diagrama de flujo del algoritmo [B6].
a) Fase de preprocesado: 1. Normalización del fondo de la imagen, (figura 3.11).
Figura 3.11: Normalización del fondo de imagen [B6].

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 28 -
2. Realzado de vasos finos, procesando la imagen con un conjunto de filtros de detección de línea, correspondientes a 4 orientaciones: 0°, 45°, 90° y 135°. Para cada píxel, la respuesta del filtro más alta se mantiene y añade a la imagen normalizada. b) Fase de detección de centros de las líneas de vasos:
1. Selección de candidatos a líneas centrales del vaso, usando información direccional proporcionada por un conjunto de 4 filtros direccionales Gaussianos de Diferencia de Offset conocidos como filtros DoOG, figura 3.12. La idea principal de usar estos filtros es la aparición de valores positivos en un lado de la sección transversal del vaso y negativos en el otro.
Figura 3.12: Candidatos verticales y horizontales [B6].
2. Unión de los puntos candidatos.
3. Validación de los segmentos candidatos a línea central. Esta operación se aplica a cada una de las 4 direcciones y posteriormente se combinan los resultados obtenidos. El resultado es el mapa de las líneas centrales detectadas. c) Fase de segmentación de los vasos:
1. Realzado morfológico del vaso, aplicando una transformada modificada de top-hat2
con elementos estructurales de tamaño variable con el objetivo de mejorar vasos con diferentes anchuras.
2. Reconstrucción morfológica de los vasos, usando un método de reconstrucción morfológico binario, con el fin de obtener mapas binarios de los vasos a 4 escalas.
3. Rellenado de los vasos, mediante un proceso de crecimiento de regiones usando como semillas iniciales los píxeles situados en el interior de las líneas centrales obtenidas en la
2 Transformada top-hat, es una transformación morfológica que resalta las secciones más intensa en una imagen binaria.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 29 -
fase de detección de líneas centrales de los vasos. El crecimiento se aplica de forma sucesiva a las 4 escalas y en cada uno de los pasos del crecimiento de región la imagen semilla es el resultado de la agregación previa.
3.2.2.-MEJORA DE LOS RESULTADOS OBTENIDOS.
Con el objetivo de obtener una mejora en los resultados de la función de Mendonça, se procede a una ecualización del plano L que aplicado a Mendonça (figura 3.14.b) y complementada con el resultado anterior (figura 3.14.a) nos daría el resultado que usaremos finalmente, figura 3.14.c.
Figura 3.13: Histograma ecualizado del plano L.
(a) (b)

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 30 -
(c)
Figura 3.14: (a) Detección de los vasos sanguíneos mediante la función Mendonça en el
plano L*. (b) Resultado de Mendonça del plano L* ecualizado. (c) Red de vasos final suma de
(a) y (b).
3.2.3.- ELIMINACIÓN DE LOS VASOS SANGUÍNEOS.
Una vez obtenida la red de vasos, se eliminarían mediante difusión anisotrópica. El objetivo de
la difusión es suavizar dentro de las regiones limitadas por los bordes pero no a través de ellos.
Con esto se consigue eliminar información irrelevante, como los pequeños y finos capilares, las
hemorragias y los microaneurismas, preservando lo importante: el contorno del disco óptico y
los vasos sanguíneos. Sin embargo, en este proyecto, el resultado deseado es eliminar los
vasos manteniendo el borde del disco. Para conseguir este propósito, se utiliza una función de
difusión anisotrópica modificada.
La difusión anisotrópica [B18] consiste en resolver la ecuación del calor para una imagen. La
idea es que si la temperatura de un cuerpo tiende a ser uniforme, la evolución de la ecuación
de calor tenderá a homogeneizar la imagen. El tiempo de actuación de la ecuación deberá
estar acotado, pues si es excesivo puede hacer que la imagen resultado se suavice demasiado.
La función de difusión empleada se basa en la ecuación de Perona-Malik [B19]. Esta ecuación
puede discretizarse tal y como se muestra a continuación:
��,���� � ��,�� � �� . ��� � ��. ��� � �� . ��� � ��. �����,�� (2)
Donde 0≤λ≤0.25 representa la constante de estabilidad, los subíndices N, S, E y O hacen
referencia a los cuatro vecinos: Norte, Sur, Este y Oeste respectivamente, y el símbolo � indica
las diferencias con los 4 vecinos, que se obtienen según las siguientes ecuaciones:
����,� � ��!�,� ��,�

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 31 -
�"��,� � ����,� ��,�
�#��,� � ����,� ��,�
�$��,� � ��!�,� ��,�
(3)
Los coeficientes de conducción (�%) se calculan mediante la aproximación que da privilegios a
las regiones amplias frente a las pequeñas. Además, se añade la modificación necesaria para
poder eliminar los vasos con la difusión.
�% � &1 () *+ �),*-�.- /* +.0 120.0 02)34í)*.0���|�6|78
94*-2 /* +.0 120.0 02)34í)*.0 :
(4)
Para n= N, S, E y O. K es el umbral que controla el gradiente de conducción, se toma
experimentalmente el valor k=12.
3.3.- FASE III: CONSTRUCCIÓN DEL CONTORNO DEL DISCO ÓPTICO.
3.3.1.- RECOLECCIÓN DE LOS PUNTOS CANDIDATOS.
En las etapas anteriores teníamos como objetivo eliminar todos los elementos que pudieran
interferir en la detección del disco óptico y encontrar el punto de partida donde ubicarlo, es
decir el centro del disco. Ahora, el siguiente paso consiste en seleccionar qué puntos forman
parte del contorno del disco.
Para ello, recurriremos a las características de la región que queremos encontrar, como
sabemos es la zona más brillante y, por tanto, el borde será el salto que veamos en el perfil de
intensidad.
Para calcular los diferentes perfiles de intensidad, se realiza un barrido angular, con
incrementos de un grado, partiendo del centro del disco óptico.
A partir de este punto, solo tendríamos que representarlo teniendo en cuenta la distancia que
existe entre esos puntos y el centro encontrado en etapas anteriores.
Posteriormente, se suaviza la curva del perfil de intensidad obtenida; estableciendo un umbral
del 95% del máximo absoluto de dicho perfil, para eliminar los pequeños picos que puedan
confundirse con máximos locales, y se busca el máximo local más cercano al centro del disco.
Repitiendo este proceso para cada uno de los perfiles de intensidad se consiguen todos los
píxeles candidatos a formar parte del borde. La figura 3.15, es un recorte de la imagen de
partida en escala de grises en la que se han representado esos puntos candidatos.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 32 -
Figura 3.15: Puntos candidatos del disco óptico.
3.3.2.- FILTRADO Y REPOSICIONAMIENTO DE LOS PUNTOS DE CONTORNO ATÍPICOS.
Puede ocurrir que alguno de esos puntos candidatos no se corresponda con un punto del
contorno real del disco óptico; estos puntos son los denominados puntos atípicos. Para
corregir esos errores de detección se utiliza la signatura del borde [B17], que no es más que la
representación unidimensional del límite de una región que muestra como varía la distancia
del centroide al borde con respecto al ángulo (figura 3.15).
En esa representación, los puntos atípicos son aquellos que provocan una variación brusca o
grande en términos de distancia, es decir, estos puntos se pueden identificar como valores
altos en la magnitud del gradiente de la primera derivada de la signatura.
Una vez que se han identificado los puntos atípicos de entre los puntos candidatos para formar
el contorno del disco óptico, se reubican en una nueva posición que refleje mejor el verdadero
borde del disco.
El reposicionamiento de estos puntos se realiza interpolando, en este caso, mediante el
método Spline3 [B20], que consiste en una interpolación cúbica. El resultado final es un
conjunto de puntos que representa el contorno real del disco óptico.
3.3.3.- OBTENCIÓN DEL CONTORNO DEL DISCO MEDIANTE CONTORNOS ACTIVOS.
Una vez ajustada la posición de los puntos de contorno, se conectan los puntos obtenidos
mediante una Snake. El objetivo de usar una Snake es obtener una estimación lo más realista
posible del borde del disco óptico.
La extracción de contornos, más conocida como Snake, no es más que una técnica de
movimiento de píxeles basada en los gradientes de energía residentes en la misma. Definiendo
una serie de parámetros de movimiento e inicializando de forma conveniente, los píxeles
pertenecientes a la Snake pueden converger a los límites de forma correcta y precisa.
Los mínimos relevantes que conforman la superficie potencial de una imagen dada, se
corresponden con los bordes significativos de los objetos a segmentar. En dicha superficie las
coordenadas x,y coinciden con el sistema cartesiano de la imagen, y la coordenada z coincide
con el valor en el punto (x,y), en este caso la intensidad. Partiendo de este modelo, la
superficie potencial, cuenta con una energía potencial gravitatoria en función de z. Esta
3 Una Spline es una curva definida a tramos mediante polinomios.
CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 33 -
superficie bajo el efecto de un campo gravitatorio virtual permite referirse al término de
energía potencial de la Snake [B21].
Una Snake se define como una curva Spline (cerrada) que minimiza su energía, guiada por
fuerzas internas y externas provenientes de la imagen. Es, por tanto, un contorno activo que
evoluciona de forma dinámica hacia los contornos relevantes de la imagen. Además, es
elástico y está formado por dos tipos de materiales en el modelo: varas, que lo hacen
resistente ante dobleces, y cuerdas (snaxels), que lo hacen resistente ante estiramientos.
La snake de forma natural varía su posición buscando un estado energético menor, es decir,
una menor energía potencial gravitacional, la cual es calculada mediante la suma de las
energías potenciales gravitatorias en cada snaxel y de la energía potencial obtenida de una
serie de restricciones internas y externas.
Cuando se trabaja con imágenes médicas, los métodos de contornos activos no se aplican
directamente sobre la imagen en escala de intensidades, porque este tipo de imágenes
contiene altos componentes de ruido, lo cual hace que, sin un procesamiento previo, resulte
muy difícil hallar los contornos de la misma, porque se crean mínimos locales que pueden
afectar a la convergencia hacia el resultado final de la segmentación. El pre-procesamiento de
este tipo de imágenes consiste, por lo general, en la aplicación de técnicas clásicas de
procesamiento de imágenes entre las que se encuentran los filtros de alisamiento, filtros
detectores de bordes y la umbralización. Por esta razón, se ha calculado una estimación del
borde del disco óptico antes de utilizar contornos activos para su detección.
Mediante la difusión anisotrópica (filtro de alisamiento) se consigue atenuar las componentes
de alta frecuencia que no pertenecen a los contornos y que podrían causar problemas de
detección. Para realizar una detección más confiable de los contornos, tras suavizar la imagen,
se considera que el disco óptico estará formado por los píxeles con mayor intensidad de la
imagen (umbralización). Posteriormente, se detecta el borde a partir de la imagen difuminada
que no es más que una modificación de la derivada de la imagen, ya que la magnitud de la
primera derivada puede usarse para detectar la existencia de bordes.
En este caso, se ha utilizado una variante de las Snake convencional. Se ha empleado el Flujo
Vectorial Gradiente (GVF) [B22] que consiste en una difusión espacial del gradiente, sobre un
mapa de bordes derivado de la imagen, por lo que, provoca fuerzas difusas que obligan a la
Snake a alejarse del objeto a segmentar y vectores de fuerza que lo atraen hacia los bordes. La
combinación de estas fuerzas es el objetivo de la aplicación del GVF a la Snake.
En la figura 3.16a, se ha representado el borde candidato y la primera curva de la Snake, una
circunferencia de radio menor al tamaño del disco óptico y concéntrica con él. Mientras que en
la figura 3.16b se observa el proceso de la Snake hasta alcanzar el borde.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 34 -
Figura 3.16: (a) Inicialización de la Snake. (b) Progreso de la Snake hasta alcanzar el borde.
Como se desprende de las imágenes anteriores, la aplicación del GVF permite una inicialización
menos exigente que con las Snake tradicional y consigue una detección de mayor precisión en
los contornos que presentan concavidades y convexidades.
El resultado final de la detección del disco óptico puede considerarse como una buena
aproximación al contorno real del mismo.
3.3.4.- DINAMIZACIÓN DE LAS VARIABLES NECESARIAS PARA LA OBTENCIÓN DEL CONTORNO.
Como hemos mencionado antes, la Snake tiene un grave inconveniente en la inicialización de
variables. En la figura 3.18 y 3.3 podemos ver que tanto un exceso como un número pequeño
de iteraciones de la función nos alejan del contorno del disco.
Para evitar esto, se propone un modelo similar al establecido en la búsqueda del centro del
disco óptico, que se vuelve a repetir pero con constantes diferentes. Primero se realiza el
promedio de la varianza y posteriormente se difumina la ventana con un filtro media cuya
umbralización se establece alrededor del 22% del máximo valor de la intensidad, esta
constante difiere del 90% establecido en la búsqueda del centro del disco óptico y se ha
obtenido de forma experimental. Vemos un ejemplo en la figura 3.17.b, partiendo del centro
localizado en las anterior etapa, podemos iterar la función Snake mientras que la aproximación
circular del contorno obtenido, se encuentre dentro de la zona central blanca que
representaría los límites del disco óptico.

CAPÍTULO III: DETECCIÓN DEL DISCO ÓPTICO.
- 35 -
Figura 3.17: (a) Resultado del promedio de la varianza. (b) Máscara binaria con umbral del
22%.
De este modo ya podemos crear una máscara binaria que nos ayudará a establecer el límite de
iteraciones de la Snake. Como vimos en la máscara resultante de la figura 3.8.d no siempre el
umbral establecido es el correcto. Impondremos que superados unos límites, establecidos de
forma experimental (70 y 220 iteraciones), el mínimo número de repeticiones de la Snake sea
130 (figura 3.18.a) o 170; en los respectivos casos. Estos límites se deben a los casos extremos,
en los que zona blanca que delimita el contorno del disco tienen unos tamaños
desproporcionados debido a la pésima calidad de la imagen.
De esta forma, no sólo hay una posibilidad de 170 iteraciones como ocurría en anteriores
proyectos.
Figura 3.18: (a) Resultado con correcto número de iteración snake. (b) Resultado con
incorrecto número de iteraciones.
CAPÍTULO IV: DETECCIÓN DE LA
EXCAVACIÓN.
1.- MOTIVACIÓN. La zona nombrada como excavación de la retina, normalmente es de color blanco amarillento.
Su diámetro horizontal suele ser menor de la mitad del diámetro horizontal del disco. Al igual
que ocurría con el disco óptico su caracterización parece sencilla, pero las diferentes
posibilidades de tamaño y formas afectados por patologías como la diabetes y los vasos que
atraviesan su superficie hace que la segmentación no sea tan trivial.
Conseguir analizar una imagen de fondo de ojo puede llegar a ser tedioso cuando la calidad no es del todo buena, repercutiendo esto en posibles fallos de diagnósticos. Con este algoritmo intentaremos mejorar el sistema de segmentación y una vez conseguido, se verá la relación excavación/disco óptico (E/D), que se refiere al tamaño relativo de la excavación con respecto al diámetro del nervio óptico. Esta medida se toma preferentemente en su diámetro vertical. Algunos datos a tener en cuenta son [I5]: - El tamaño de la excavación se expresa por porcentaje, no debe exceder más de 30% del total del tamaño del disco ni ha de llegar al borde temporal.
- La excavación en ambos ojos no debe diferir significativamente. La razón para
observar la relación E/D es la investigación de glaucoma, que causa un aumento en la
excavación de la papila, con atrofia secundaria.
- La excavación fisiológica puede aumentar su tamaño en grado variable, en
condiciones patológicas (glaucoma) o desaparecer en cuadros de inflamación o estasis del
nervio óptico (neuritis y edema); en estos casos de inflamación, la excavación fisiológica se
rellena de tejido edematoso y el disco mismo puede volverse prominente. El nivel de la papila
con respecto al plano retiniano cambiará de estar al mismo nivel en casos normales a volverse
prominente, proyectándose hacia la cavidad vítrea algunos milímetros.
2.- ESTADO DEL ARTE. Hasta ahora, hay poco escrito respecto a esta segmentación, al contrario de lo que ocurre con
el disco óptico. Métodos de vanguardia abordan esta cuestión por procesamiento de la imagen
con técnicas de nivel de gris o umbral [B10], [B12], [B16]. Algunos enfoques hacen uso de
imágenes 3D del disco óptico realizando una estimación de la frontera de la excavación pero
necesitando un elevado coste computacional. En cuanto a nuestro conocimiento, ningún
algoritmo presta atención a la información de color presente en la retinografía.
La caracterización de la excavación supone un grave problema, la excavación tiene tonos más
claros que el disco óptico y unas dimensiones del orden de 1/7 del tamaño en caso de no

CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN.
- 37 -
existir anomalías, esto implica que es bastante reducido; es por ello que la red vascular que
nace en el centro impide ver con claridad el contorno de éste como vemos en la figura 4.1.b.
Figura 4.1: (a) Excavación visible. (b) Excavación oculta por los vasos sanguíneos.
El algoritmo presentado parte del propuesto en [B10]. Como veremos más adelante, usando
un sistema de detección basado en contornos activos, toma el disco óptico detectado como
imagen de partida. Por este motivo, si conseguimos una segmentación más afinada en el
capítulo anterior, tendremos más posibilidades de realizar una correcta segmentación del cup.
3.- ALGORITMO DE SEGMENTACIÓN DE LA EXCAVACIÓN. Este algoritmo lo podemos resumir en las siguientes etapas:
o I: Pasos previos:
- Máscara de la segmentación del Disco Óptico:
- Eliminación de contornos falsos.
o II: Construcción del contorno del excavación.
- Distancia de color CIE 94.
- Dilatación y aproximación a una elipse.
- Filtro Gaussiano.
- Relación de aspecto Disco-Excavación.
Veamos un esquema del proceso de segmentación:
Figura 4.2: Esquema de la segmentación de la excavación.

CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN.
- 38 -
3.1.- FASE I: MÁSCARA DE LA APROXIMACIÓN CIRCULAR DEL DISCO ÓPTICO Y
ELIMINACIÓN DE FALSOS CONTORNOS.
El primer paso que se realiza, es crear una máscara binaria con el radio y el centro de la
aproximación circular del disco óptico obtenida en el Capítulo III, de este modo conseguimos
ubicarlo perfectamente, figura 4.3.
Figura 4.3: Máscara binaria del DO obtenido en la figura 3.18.a.
Una vez calculada, se aplica a la imagen de partida como si de un filtro se tratara, eliminando
cualquier falso contorno que exista fuera de la máscara. El resultado de esto nos daría el
recorte de la figura 4.4.
Figura 4.4: Recorte obtenido al aplicar la máscara binaria.
3.2.- FASE II: CONSTRUCCIÓN DEL CONTORNO DE LA EXCAVACIÓN.
3.2.1.- DISTANCIA DE COLOR CIE 94.
Una vez aislada el área del disco óptico, procedemos a la segmentación de la excavación
dentro de ella. El enfoque propuesto aquí se basa en la distancia de color CIE 94, que añade un
modelo más perceptual y realista que la Euclidiana.
En este proyecto [B10], se propone aprovechar a priori conocimientos sobre la distribución de
color en el área del disco óptico:
• Los vasos sanguíneos tienen un color rojizo oscuro.
• Hay una pequeña porción de fondo en distintos tonos de naranja.
• La zona de excavación se caracteriza por su alto nivel de brillo que hace que parezca
casi amarillo, como puede verse en la figura 4.5.

CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN.
- 39 -
Por lo tanto, un método de segmentación basado en la información de color podría identificar
el área de la excavación del resto de elementos mediante la búsqueda de los píxeles más
brillantes del disco óptico. El algoritmo considera cada píxel en el disco como un punto en el
espacio de color seleccionado, intentando agruparlos con precisión.
Figura 4.5: Distribución de color de la excavación.
Con el fin de realizar la segmentación de color, se requiere un espacio de color uniforme. Las
distancias Euclidianas en espacios CIE L*a*b* se creían que estaban correlacionadas con las
diferencias de percepción de color, más tarde se demostró que esto no era como se esperaba.
Para mejorar la uniformidad de las mediciones de diferencia de color CIE L*a*b*, en 1995 se
propuso una modificación empírica de la distancia Euclidiana. Esta medida de distancia es
conocida como CIE 94. Más recientemente, el CIE ha establecido la ecuación de diferencia de
color de CIEDE2000 que se extiende el concepto de CIE94 con mayor complejidad.
Se ha demostrado que la CIEDE2000 funciona mejor que todas las fórmulas de distancia color,
a pesar de ello los resultados proporcionados por ambas distancias, CIE94 y CIEDE2000, son
casi idénticos. Con el fin de evitar un aumento de la complejidad computacional, CIE94 es la
métrica preferida. Como el área de la excavación es realmente distinguible del resto de los
elementos del disco, con CIE94 se puede proporcionar los resultados relacionados con
humanos necesarios con la menor cantidad de coste computacional.
Una vez seleccionados el espacio de color y la métrica de distancia, se debe seleccionar
también el algoritmo de segmentación que sería capaz de particionar el espacio de datos. En
este enfoque, debido a su simplicidad y eficacia se ha elegido un método basado en la
conocida técnica “K-means”.
Como resultado de este procedimiento de K-means, cada píxel en la zona del disco óptico es
asignado a uno de los centroides de color. Para identificar el grupo de la excavación, el
algoritmo compara el brillo medio de cada uno de los grupos, y se elige el grupo con el valor
más alto, figura 4.6.e.
K, es elegido de forma automática, maximizando el índice Dunn.

CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN.
- 40 -
El índice Dunn es una métrica para la evaluación de algoritmos de agrupamiento. El objetivo es
identificar conjuntos de grupos compactos, pudiendo existir una posible variación entre los
miembros del grupo, siendo esta menor que la distancia externa de los grupos. Para una
asignación determinada de grupos, un mayor índice Dunn indica mejor agrupamiento.
El índice de Dunn se puede calcular mediante la siguiente fórmula:
; � min�?�?% @ min�?�?%,�A� B C��,��DEFGH8HI CJ�K�LM (4)
Donde:
• d(i,j) representa la distancia entre los grupos i – j.
• d’(k) mide la distancia intra-grupo del grupo K.
La distancia d(i,j) entre dos grupos puede ser cualquier tipo de medidas de distancia, tales
como la distancia entre los centroides de los grupos. De manera similar, la distancia intra-
grupo d’(k) se puede medir en una variedad de formas, tales como la distancia máxima entre
cualquier par de elementos en el grupo K. Como criterio interno, se busca grupos con alta
similitud intra-grupo y baja similitud entre grupos.
(a) (b) (c) (d) (e)
Figura 4.6: (a) Disco óptico. (b) Píxeles etiquetados como los vasos sanguíneos. (c) Píxeles
etiquetados como fondo del D.O. naranja oscuro. (d) Píxeles etiquetados como fondo del
D.O. naranja brillante. (e) Excavación segmentada.
3.2.2.- APROXIMACIÓN A UNA ELIPSE.
Una vez que hemos extraído el conjunto de pixeles clasificados como excavación, se obtiene
una estimación del contorno como aproximación de una elipse de mínimos cuadrado.
El área encerrada por la elipse se considerará la superficie de la excavación, así el CDR podrá
ser calculado fácilmente.
Figura 4.7: Contorno aproximado de la excavación.

CAPÍTULO IV: DETECCIÓN DE LA EXCAVACIÓN.
- 41 -
3.2.3.- RELACIÓN DE ASPECTO DISCO-EXCAVACIÓN.
El CDR es la relación de aspecto usada para comparar los resultados extraídos de forma automática con los extraídos manualmente, además nos sirve para evaluar la calidad de los resultados y contrastarlos con otros proyectos. N;O � PQRSPTU (5)
Donde VWX y VYZ[representan el área de la excavación y del disco óptico obtenido en los
apartados anteriores.
FIGURA 4.8: RESULTADO FINAL DE LA SEGMENTACIÓN DEL DISCO ÓPTICO Y LA EXCAVACIÓN.

CAPÍTULO V: RESULTADOS.
1.- RESULTADOS DE LA DETECCIÓN DEL DISCO ÓPTICO Y EXCAVACIÓN. En este capítulo intentaremos resumir los resultados obtenidos del algoritmo propuesto sobre
50 retinografías de una base de datos privada. El estudio de resultados de este algoritmo será
expuesto en el apartado siguiente de análisis estadístico, en el que también se comparará con
los resultados obtenidos en anteriores proyectos [B.7] y [B10] sobre las mismas imágenes.
Para cada una de las imágenes de partida se elabora una ficha que presenta los siguientes
campos:
o Imagen original: Retinografía original. (Segunda fila izquierda).
o Imagen segmentada manualmente: Retinografía en la que un especialista
selecciona el contorno perteneciente al disco óptico y excavación. (Primera fila
derecha).
o Resultados:
o Primera fila, izquierda: Detección del disco óptico en color rojo y
aproximación circular en color azul. Arriba, número de iteraciones de
la función Snake.
o Segunda fila, derecha: Detección de la excavación mediante el modelo
cluster color CIE 94 en color violeta respecto al disco óptico en
amarillo. Arriba, CDR resultante.
o Tercera fila, de derecha a izquierda: Detección de vasos sanguíneos sin
y con mejora propuesta.
o Conclusiones: Breve explicación de los resultados obtenidos. En los casos de
correcta detección se expone el error teórico, diferencia entre el CDR
calculado de forma automática y manualmente por un especialista.
Salvo que se indique lo contrario, las dos variables del algoritmo se mantienen a unos valores
constantes para todas las imágenes. Para la difusión anisotrópica, el número de iteraciones del
plano L* se inicializa a 20 y el umbral K a 12.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 43 -
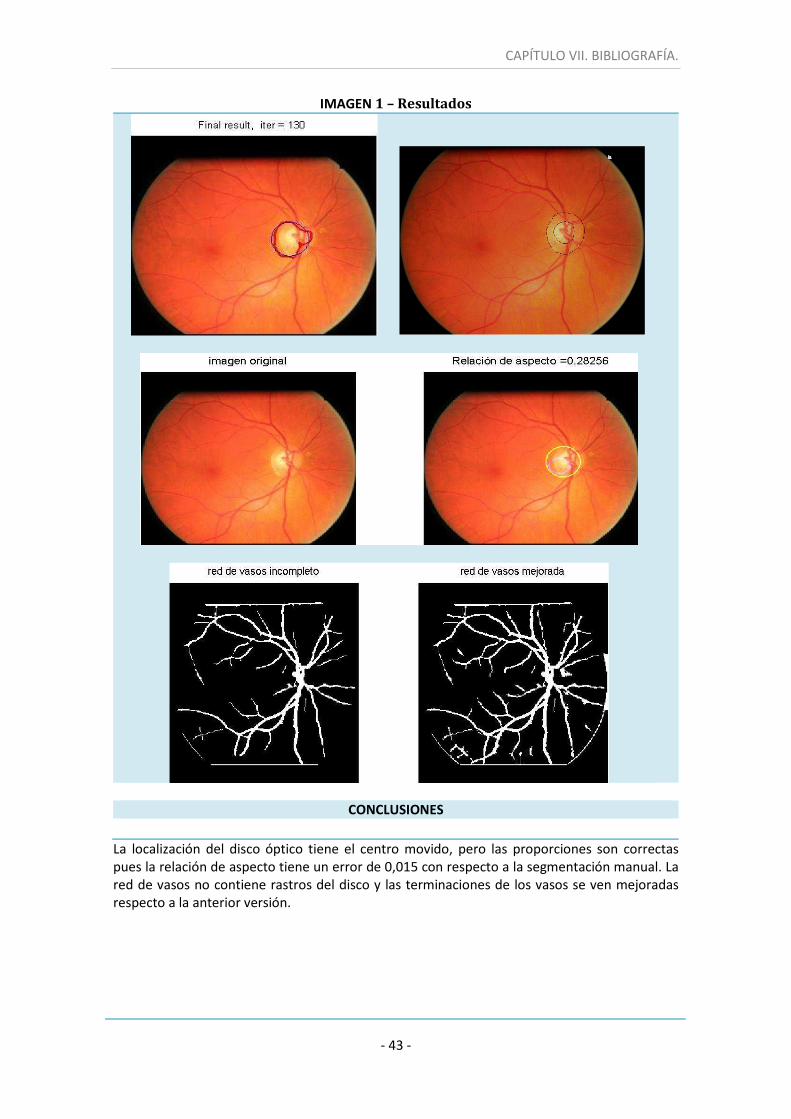
IMAGEN 1 – Resultados
CONCLUSIONES
La localización del disco óptico tiene el centro movido, pero las proporciones son correctas pues la relación de aspecto tiene un error de 0,015 con respecto a la segmentación manual. La red de vasos no contiene rastros del disco y las terminaciones de los vasos se ven mejoradas respecto a la anterior versión.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 44 -
IMAGEN 2 – Resultados
CONCLUSIONES
La detección del disco óptico se ve seriamente perjudicado por los vasos que salen del centro del disco. La relación de aspecto tiene un error de 0,03 con respecto a la segmentación manual.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 45 -
IMAGEN 3 – Resultados
CONCLUSIONES
La detección del disco óptico tiene mucha precisión. La relación de aspecto tiene un error de 0,05 con respecto a la segmentación manual. La red de vasos se ve claramente mejorada, aunque también podemos ver que contiene ruido digital adicional.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 46 -
IMAGEN 4 – Resultados
CONCLUSIONES
La detección del disco óptico es buena. La relación de aspecto tiene un error de 0,105 con respecto a la segmentación manual. La red de vasos contiene más información que la versión anterior, aunque sería interesante eliminar contornos que no aportan información.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 47 -
IMAGEN 5 – Resultados
CONCLUSIONES
Este caso es similar a la imagen anterior en el cual la aproximación aporta una información más veraz que la obtenida por la Snake. La relación de aspecto tiene un error de 0,003 con respecto a la segmentación manual. La imagen de la red de vasos obtenida es más completa aunque no presenta grandes cambios.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 48 -
IMAGEN 6 – Resultados
CONCLUSIONES
En este caso también la aproximación aporta información más veraz que la obtenida por la Snake. La relación de aspecto es bastante buena y contiene un error de 0,02 con respecto a la segmentación manual. La imagen de la red de vasos obtenida es bastante limpia.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 49 -
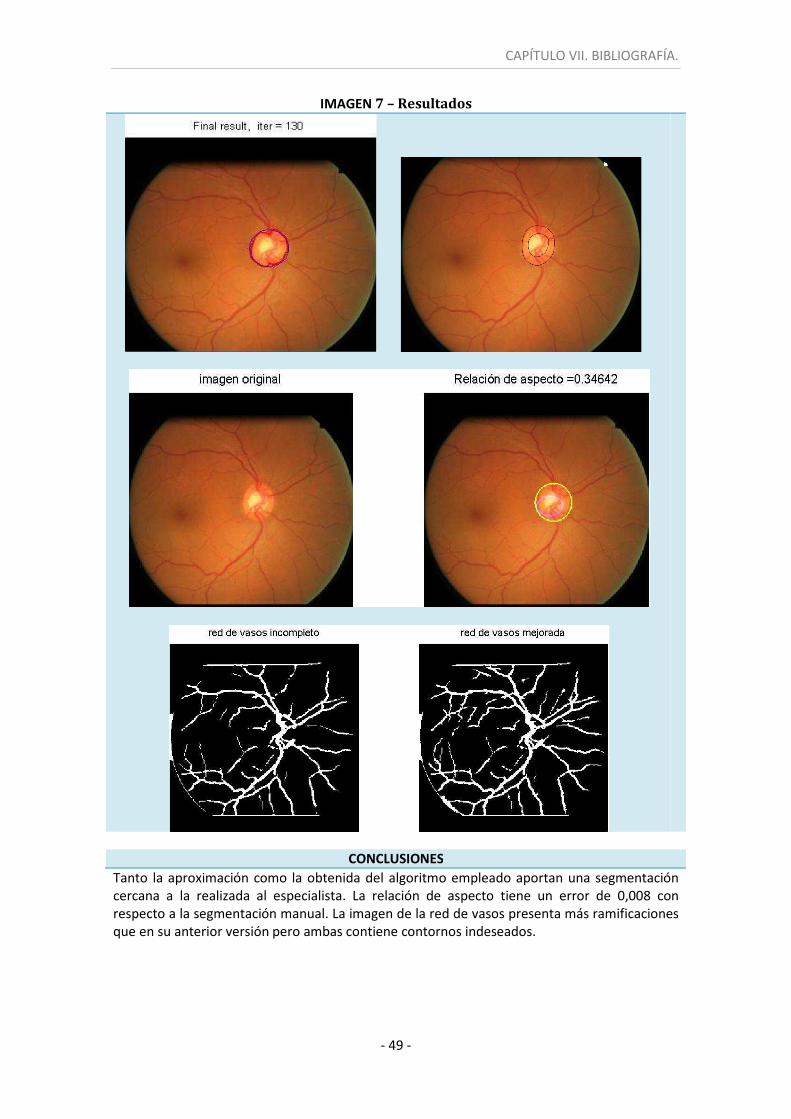
IMAGEN 7 – Resultados
CONCLUSIONES
Tanto la aproximación como la obtenida del algoritmo empleado aportan una segmentación cercana a la realizada al especialista. La relación de aspecto tiene un error de 0,008 con respecto a la segmentación manual. La imagen de la red de vasos presenta más ramificaciones que en su anterior versión pero ambas contiene contornos indeseados.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 50 -
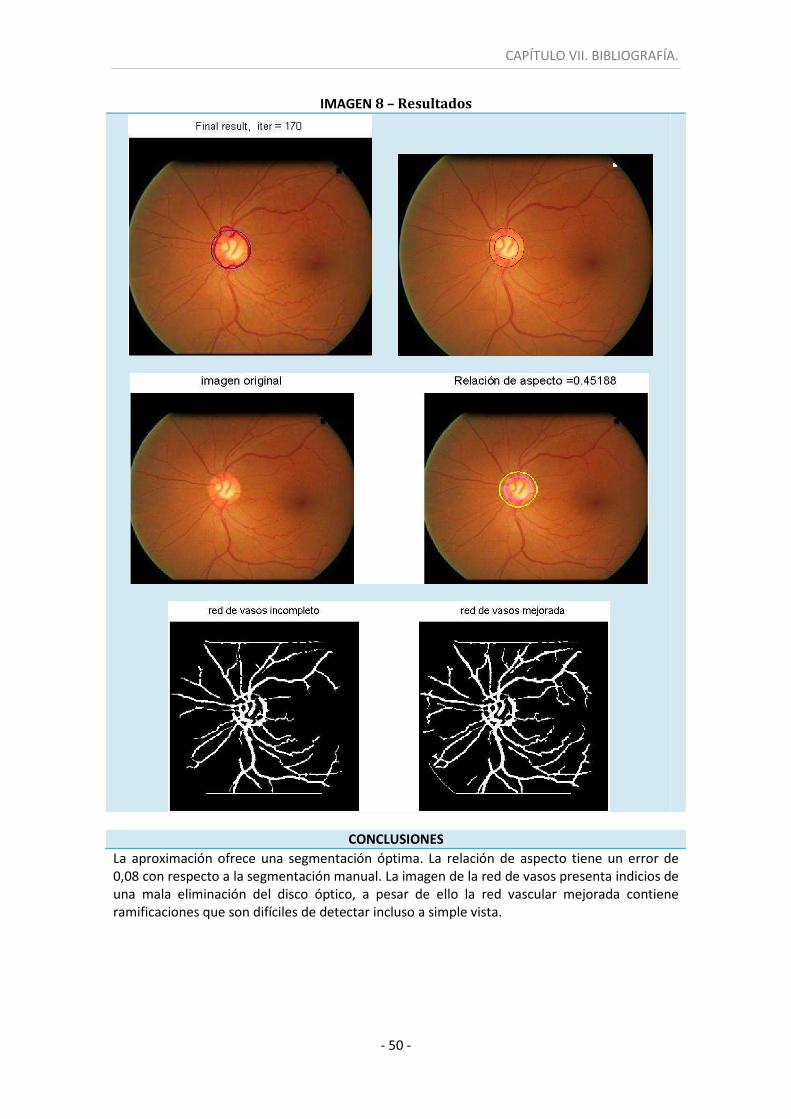
IMAGEN 8 – Resultados
CONCLUSIONES
La aproximación ofrece una segmentación óptima. La relación de aspecto tiene un error de 0,08 con respecto a la segmentación manual. La imagen de la red de vasos presenta indicios de una mala eliminación del disco óptico, a pesar de ello la red vascular mejorada contiene ramificaciones que son difíciles de detectar incluso a simple vista.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 51 -
IMAGEN 9 – Resultados
CONCLUSIONES
La segmentación está bien caracterizada. La relación de aspecto tiene un error de 0,055 con respecto a la segmentación manual. La imagen de la red de vasos presenta indicios de una mala eliminación del disco óptico, y no se consigue mejora los resultados de la versión anterior.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 52 -
IMAGEN 10 – Resultados
CONCLUSIONES
La aproximación es de muy buena calidad. A pesar de ello la relación de aspecto tiene un error
que asciende a 0,13 con respecto a la segmentación manual. Aun así los peores resultados son
encontrados en la imagen obtenida de la segmentación de la red de vasos, en la que se
observan restos que no forman la red, producido por la pésima calidad de la imagen de fondo.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 53 -
IMAGEN 11 – Resultados
CONCLUSIONES
La aproximación sigue siendo muy veraz. El CDR baja a 0,006 en relación a la segmentación
manual. Con respecto a la red de vasos, se observan terminaciones nuevas en las
ramificaciones y ruido añadido.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 54 -
IMAGEN 12 – Resultados
CONCLUSIONES
La aproximación es mejor que la alcanzada a la salida de la Snake. La relación de aspecto
excavación-disco tiene un bajo error de 0,038 con respecto a la segmentación manual. En la
segmentación de la red de vasos, se consigue enlazar ramas discontinuas pero una vez más se
observa en ambas imágenes que no se ha conseguido eliminar el contorno del disco óptico.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 55 -
IMAGEN 13 – Resultados
CONCLUSIONES
La segmentación del disco óptico está bien ubicada pero no se consigue un resultado deseado.
A pesar de ello la relación de aspecto tiene solo un error de 0,04 con respecto a la
segmentación manual. Los peores resultados son encontrados en la imagen obtenida de la
segmentación de la red de vasos, en la que se observan restos que no forman la red, producido
por la pésima calidad de la imagen de fondo.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 56 -
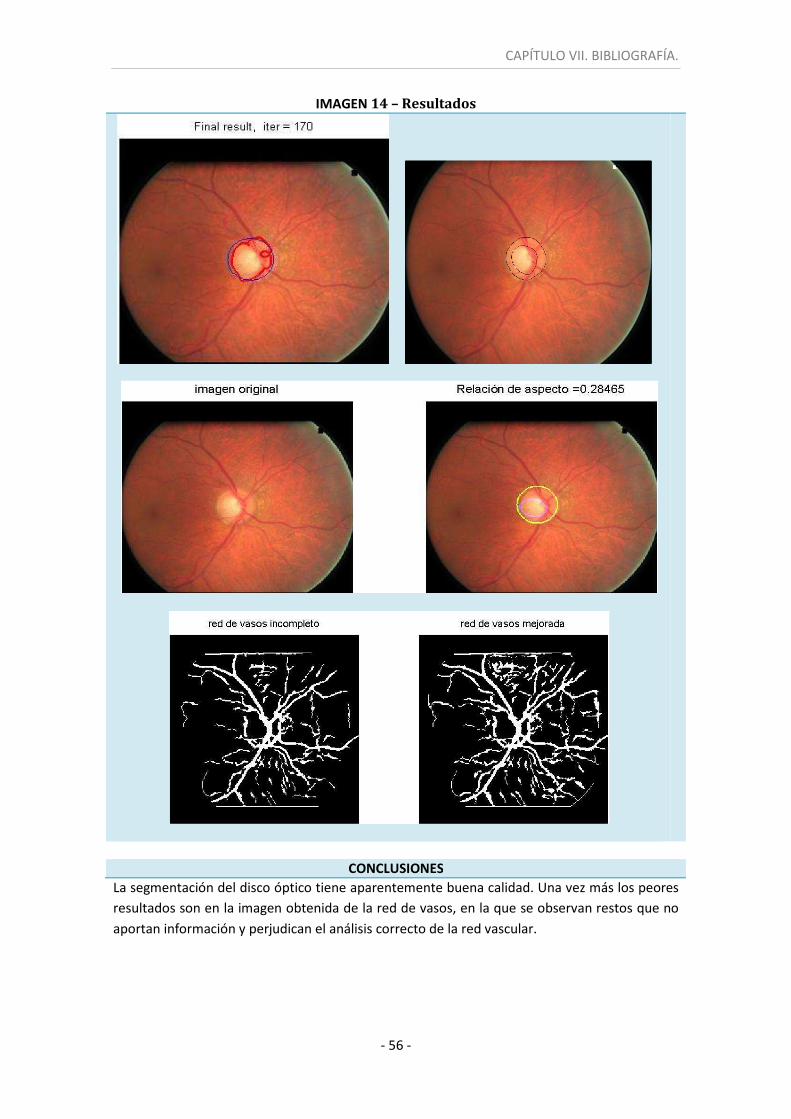
IMAGEN 14 – Resultados
CONCLUSIONES
La segmentación del disco óptico tiene aparentemente buena calidad. Una vez más los peores
resultados son en la imagen obtenida de la red de vasos, en la que se observan restos que no
aportan información y perjudican el análisis correcto de la red vascular.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 57 -
IMAGEN 15 – Resultados
CONCLUSIONES
El disco óptico está bien ubicado y caracterizado. El error de la relación de aspecto es bastante
alta 0,46 con respecto a la segmentación manual. En la imagen obtenida de la segmentación
de la red de vasos, se observa en el sector derecho de la imagen añadidos producidos por la
imagen de fondo, además vemos el disco óptico mal eliminado, sin embargo la red está
completa.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 58 -
IMAGEN 16 – Resultados
CONCLUSIONES
La segmentación del disco óptico está bien ubicada y el radio es prácticamente idéntico al
segmentado manualmente. A pesar de ello la relación de aspecto tiene un error de 0,44 con
respecto a la segmentación manual. Los resultados en la imagen obtenida de la segmentación
de la red de vasos, son bastante buenos en la nueva red.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 59 -
IMAGEN 17 – Resultados
CONCLUSIONES
La segmentación del disco óptico no es del todo correcta, quizás debido a un exceso de
iteraciones. Es por ello que la segmentación de la excavación no es correcta. En este caso la
red vascular es de las mejores obtenidas hasta el momento, aunque el disco óptico no sea del
todo eliminado.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 60 -
IMAGEN 18 – Resultados
CONCLUSIONES
Buenos resultados en la obtención de la excavación y del disco óptico aunque, la aproximación
realizada de esta perjudique el resultado. La relación de aspecto es de 0,12 respecto a la
manual. La red que se consigue es limpia y no se ven rastros del disco óptico.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 61 -
IMAGEN 19 – Resultados
CONCLUSIONES
Al igual que ocurría en la imagen 17, los resultados son malos, la aproximación del disco óptico
está muy lejos de lo esperado, la obtenida de la Snake mejora pero no llega a ser del todo
correcta. Respecto a la red de vasos, se ve una gran mejoría de la anterior versión.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 62 -
IMAGEN 20 – Resultados
CONCLUSIONES
La localización del disco óptico tiene el centro movido, pero las proporciones son correctas pues la relación de aspecto tiene un error de 0,039 con respecto a la segmentación manual. La red de vasos no contiene rastros del disco y las terminaciones de los vasos se ven mejoradas.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 63 -
IMAGEN 21 – Resultados
CONCLUSIONES
Reduciendo el número de iteraciones en este caso, alcanzaríamos mejores resultados, a pesar
de ello, no son del todo erróneos. Con un error en el cálculo CDR del 0,07 respecto al
segmentado original. En estos resultados encontramos una red limpia de ruido, disco óptico y
muy completo.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 64 -
IMAGEN 22 – Resultados
CONCLUSIONES
La aproximación es mejor que la alcanzada a la salida de la Snake. La relación de aspecto
excavación-disco tiene un bajo error de 0,038 con respecto a la segmentación manual. En la
segmentación de la red de vasos, se consigue enlazar ramas discontinuas pero una vez más se
observa en ambas imágenes que no se ha conseguido eliminar el contorno del disco óptico.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 65 -
IMAGEN 23 – Resultados
CONCLUSIONES
El número de iteraciones en este caso debería ser reducido, además el centro parece desplazado.
Respecto a la red de vasos, está limpia de ruido, disco óptico y muy completo.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 66 -
IMAGEN 24 – Resultados
CONCLUSIONES
El disco óptico está bien caracterizado así como la excavación con un error de 0,14. En la imagen de la red obtenida no se ven cambios respecto a la resultante en el modelo anterior, el cual ya es bastante bueno.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 67 -
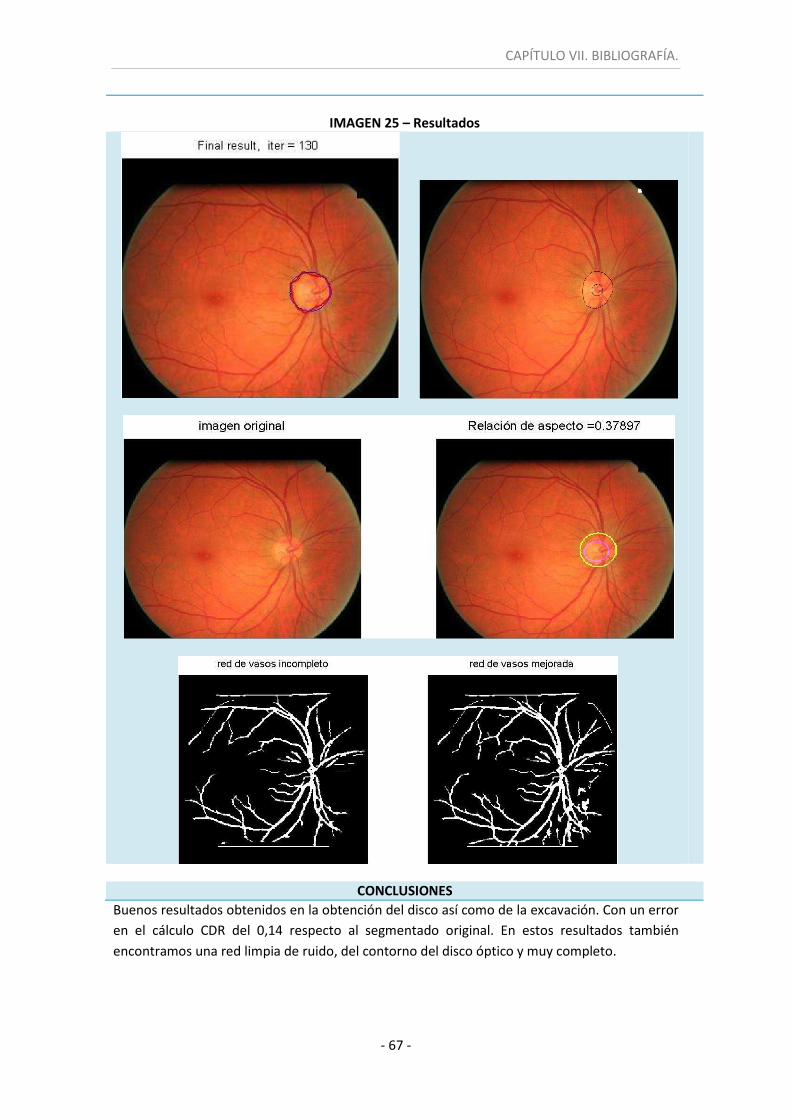
IMAGEN 25 – Resultados
CONCLUSIONES
Buenos resultados obtenidos en la obtención del disco así como de la excavación. Con un error
en el cálculo CDR del 0,14 respecto al segmentado original. En estos resultados también
encontramos una red limpia de ruido, del contorno del disco óptico y muy completo.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 68 -
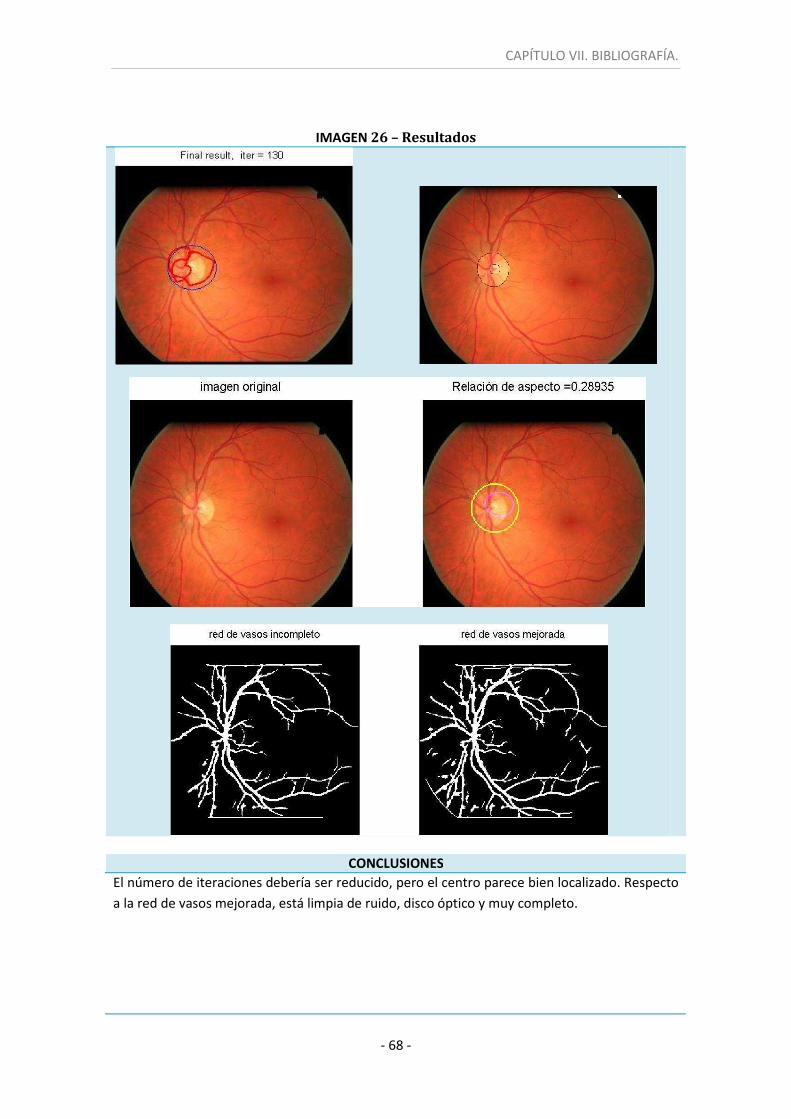
IMAGEN 26 – Resultados
CONCLUSIONES
El número de iteraciones debería ser reducido, pero el centro parece bien localizado. Respecto
a la red de vasos mejorada, está limpia de ruido, disco óptico y muy completo.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 69 -
IMAGEN 27 – Resultados
CONCLUSIONES
La detección del disco óptico se ve perjudica por el exceso de brillo en una zona de él, por lo
que el resultado de la excavación se ve afectado. Los vasos sanguíneos están determinados por
completo, incluso ayudan a percibir vasos no detectados de forma manual.
CAPÍTULO VII. BIBLIOGRAFÍA.
- 70 -
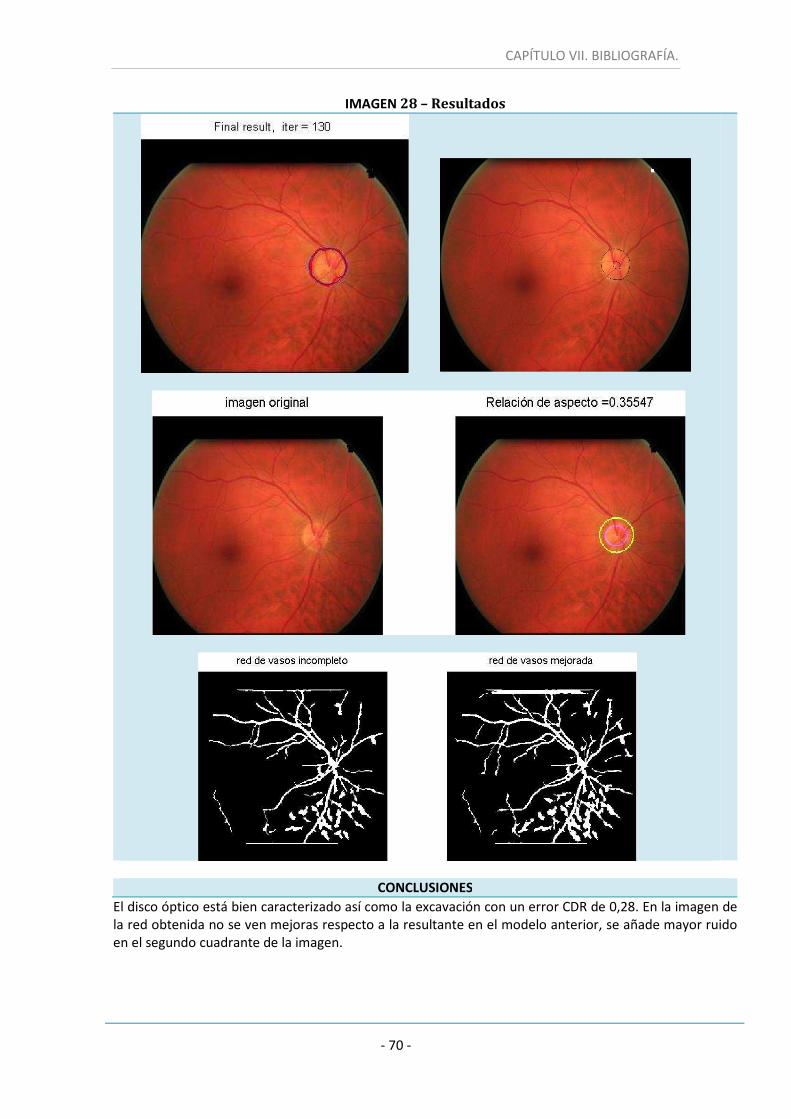
IMAGEN 28 – Resultados
CONCLUSIONES
El disco óptico está bien caracterizado así como la excavación con un error CDR de 0,28. En la imagen de la red obtenida no se ven mejoras respecto a la resultante en el modelo anterior, se añade mayor ruido en el segundo cuadrante de la imagen.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 71 -
IMAGEN 29 – Resultados
CONCLUSIONES
La segmentación del disco óptico así como la excavación es bastante buena, con un error CDR de 0,2. En la imagen de la red obtenida no se ven mejoras respecto a la resultante en el modelo anterior, se añade mayor ruido en el tercer cuadrante de la imagen.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 72 -
IMAGEN 30 – Resultados
CONCLUSIONES
A pesar de la dificultad que supone la segmentación en este caso, los resultados son buenos de forma aproximada, el CDR es 0,12. La red de vasos está correctamente detectada y en la versión mejorada se tienen nuevas terminaciones.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 73 -
IMAGEN 31 – Resultados
CONCLUSIONES
El número de iteraciones es correcto pero el centro se encuentra desplazado. Respecto a la red de vasos,
está limpia de ruido y perfectamente segmentada.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 74 -
IMAGEN 32 – Resultados
CONCLUSIONES
El número de iteraciones es correcto pero el centro se encuentra desplazado, a pesar de ello el resultado
no se aleja demasiado del obtenido manualmente. Respecto a la red de vasos, está limpia de ruido y
perfectamente segmentada.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 75 -
IMAGEN 33 – Resultados
CONCLUSIONES
Resultados aceptables en el caso del disco óptico pero no tan buenos con los conseguidos en la
determinación de la excavación. Con un alto error en el cálculo CDR respecto al segmentado
original. La red de vasos está bien definida sin ruidos añadido.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 76 -
IMAGEN 34 – Resultados
CONCLUSIONES
Los resultados obtenidos en la obtención del disco así como de la excavación se ven afectados
por la pésima calidad de la retinografía. Es por ello que también encontramos ruido de fondo,
aunque el disco óptico es eliminado por completo.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 77 -
IMAGEN 35 – Resultados
CONCLUSIONES
El contorno que se ha segmentado del disco óptico está bien ubicado, aunque excedido en
radio. Aun así la segmentación de la excavación no es correcta. En el apartado de la red
vascular se obtiene mejoría en los resultados aunque se mantienen rastros del disco.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 78 -
IMAGEN 36 – Resultados
CONCLUSIONES
Buenos resultados obtenidos en todos los apartados. Con un error en el cálculo CDR del 0,049
respecto al segmentado original.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 79 -
IMAGEN 37 – Resultados
CONCLUSIONES
A pesar del pésimo contraste de la imagen, la detección del disco es aceptable, teniendo un radio correcto pero con un centro movido. El error de CDR calculado es de 0,005. Respecto a la red vascular se ve seriamente afectada por el contorno del disco así como de ruido.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 80 -
IMAGEN 38 – Resultados
CONCLUSIONES
El disco óptico determinado por la Snake se ve mejorado por la aproximación circular. Con un
error muy bajo en el cálculo del CDR de 0,022 respecto al segmentado original. La red de vasos
está bien definida y aparentemente no se ve afectada por ruido digital.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 81 -
IMAGEN 39 – Resultados
CONCLUSIONES
Los resultados obtenidos de la Snake se ven afectados por la red de vasos aún así el disco
queda bien localizado y determinado. Con un error en el cálculo CDR del 0,026 respecto al
segmentado original. La nueva versión que segmenta los vasos permite tener una visión más
completa de toda la red, añade terminaciones que no aparecían y que de forma visual es difícil
de determinar.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 82 -
IMAGEN 40 – Resultados
CONCLUSIONES
El disco óptico tiene un exceso de iteraciones, aunque el centro se encuentra bien localizado.
Del mismo modo la excavación es correcta, con un error bajo de 0,008. En la imagen de la red
de vasos mejorada se añaden nuevos vasos y terminaciones.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 83 -
IMAGEN 41 – Resultados
CONCLUSIONES
El disco óptico vuelve a tener un exceso de iteraciones y el centro en este caso también se
encuentra bien localizado. El error aumenta al doble, valiendo 0,15. En la imagen de la red de
vasos mejorada no se aporta información sino ruido.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 84 -
IMAGEN 42 – Resultados
CONCLUSIONES
El resultado de la aproximación circular del disco es aceptable. Del mismo modo la excavación
es correcta, con un error bajo de 0,001. En la imagen de la red de vasos mejorados se empeora
más el ruido de fondo que tenía la versión anterior.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 85 -
IMAGEN 43 – Resultados
CONCLUSIONES
Detección del disco y excavación correctamente, el error calculado respecto al CDR manual es
de 0,009. La red de vasos se ve muy mejorada.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 86 -
IMAGEN 44 – Resultados
CONCLUSIONES
La detección del disco óptico es casi perfecta. La relación de aspecto tiene un error de 0,032 con respecto a la segmentación manual. La red de vasos se ve claramente mejorada, aunque existen residuos del contorno del disco óptico.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 87 -
IMAGEN 45 – Resultados
CONCLUSIONES
El disco óptico está bien determinado y localizado. La relación de aspecto asciende a 0,18 con respecto a la segmentación manual. La red de vasos no presenta mejorías evidentes.
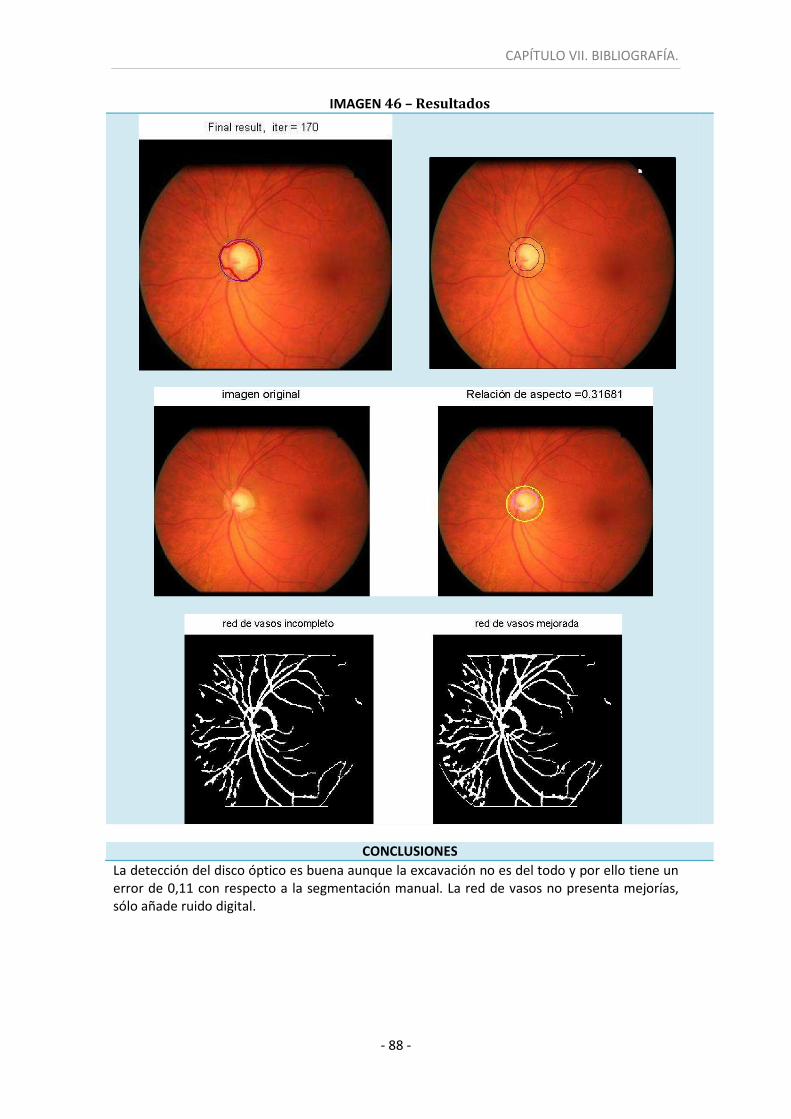
CAPÍTULO VII. BIBLIOGRAFÍA.
- 88 -
IMAGEN 46 – Resultados
CONCLUSIONES
La detección del disco óptico es buena aunque la excavación no es del todo y por ello tiene un error de 0,11 con respecto a la segmentación manual. La red de vasos no presenta mejorías, sólo añade ruido digital.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 89 -
IMAGEN 47 – Resultados
CONCLUSIONES
La imagen tiene pésima calidad, sin embargo los resultados en estas condiciones son muy
buenos. El error de CDR calculado si se ve afectado ya que es de 0,11. En la imagen de la red
mejorada, se extiende las terminaciones de los vasos sin añadir ruido, el contorno del disco
sigue presente.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 90 -
IMAGEN 48 – Resultados
CONCLUSIONES
A pesar del pésimo contraste de la imagen, la detección del disco es aceptable, teniendo un radio correcto pero con un centro movido. El error de CDR calculado es de 0,005. Respecto a la red vascular se ve seriamente afectada por el contorno del disco así como de ruido.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 91 -
IMAGEN 49 – Resultados
CONCLUSIONES
La detección del disco óptico de forma aproximada es muy buena. Aunque la relación de aspecto tiene un error de 0,27 con respecto a la segmentación manual. La red de vasos se ve mejorada en las terminaciones nerviosas, aunque existen residuos del contorno del disco óptico y ruido digital.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 92 -
IMAGEN 50 – Resultados
CONCLUSIONES
La aproximación es mejor que la alcanzada a la salida de la Snake. La relación de aspecto
excavación-disco tiene un bajo error de 0,18 con respecto a la segmentación manual. En la
segmentación de la red de vasos, se consigue enlazar ramas discontinuas pero una vez más se
observa en ambas imágenes que no se ha conseguido eliminar el contorno del disco óptico.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 93 -
2.- ANÁLISIS ESTADÍSTICO DE LOS RESULTADOS. La papila óptica, la red vascular así como la excavación son los principales elementos de una
retinografía, siendo su detección indispensable para la prevención o diagnóstico de
enfermedades.
El objetivo del algoritmo desarrollado en este Proyecto Fin de Carrera es prevenir la ceguera
causada por el glaucoma, usando como medida el CDR calculado. Es un servicio que se ofrece
como ayuda, reduciendo el tiempo de diagnóstico e intentando mejorarlo.
Por eso evaluaremos los resultados conseguidos, comparando el CDR obtenido en tres
proyectos distintos de cada una de las 50 imágenes de este capítulo.
Primeramente vamos a hacer un estudio estadístico, para ello definimos las variables que
vamos a comparar:
\�(K]� � �� ∑ (�K]��_� (6)
`�(K]� � a�� ∑ b(�K] \�(K]�c��_� , d � 1, 2, 3. , e � 1, 2. (7)
(�K] � fN;O�g] N;O�h�f, � � 1, 2, … , k (8)
Donde N es el número total de imágenes (N=50), N;O�h�es el CDR manualmente obtenido por
un experto oftalmológico en la imagen i.
K=1 hace referencia al método empleado en este proyecto, K=2 el método que se usa como
base de detección del disco óptico [B7] (como este método no realizaba la segmentación de la
excavación, se aplica el algoritmo [B10] una vez detectado el disco) y K=3 es el método de
referencia para la detección de la excavación [B10].
J=1 se refiere al modelo de detección Euclideo de la excavación y J=2 a CIE 94.
(�K]es el error de CDR en la imagen i usando el modelo K y el sistema de detección de la
excavación J, \�(K]� es la media de error y `�(K]� es la desviación de error.
En la siguiente tabla se exponen los resultados:
K=1, J=1 K=1, J=2 K=2, J=1 K=2, J=2 K=3, J=1 K=3, J=2
\l(gm 0,1256 0,1157 0,1243 0,1370 0,1365 0,1536
`l(gm 0,1126 0,1101 0,1276 0,1447 0,1322 0,1226
Tabla1: Error de CDR en 50 imágenes segmentadas en tres proyectos.
Principalmente, habría que destacar la bajada tanto en media como desviación de error
respecto a los otros dos métodos usándose el modelo CIE 94 en el algoritmo K=1. Esto implica
que el error es menor con respecto al error medio de K=2 en 0,0213 y en 0,0379 de K=3.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 94 -
En los siguientes diagramas mostraremos gráficamente los resultados del CDR calculado
automáticamente, manualmente y el rango de tolerancia de error que es clínicamente
aceptado por la comunidad oftalmológica [B23].
Ya que en los tres proyectos los mejores resultados se obtienen mediante el modelo CIE 94 de
segmentación de la excavación, sólo se expondrán estos resultados de las 50 imágenes.
Figura 5.1: Relación de aspecto disco – excavación (K=1, J=2).
Figura 5.2: Relación de aspecto disco – excavación (K=2, J=2).
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 5 10 15 20 25 30 35 40 45 50
CDR CIE94
CDR Manual
Tolerancia +
Tolerancia -
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
0 5 10 15 20 25 30 35 40 45 50
CDR CIE 94
CDR Manual
Tolerancia +
Tolerancia -
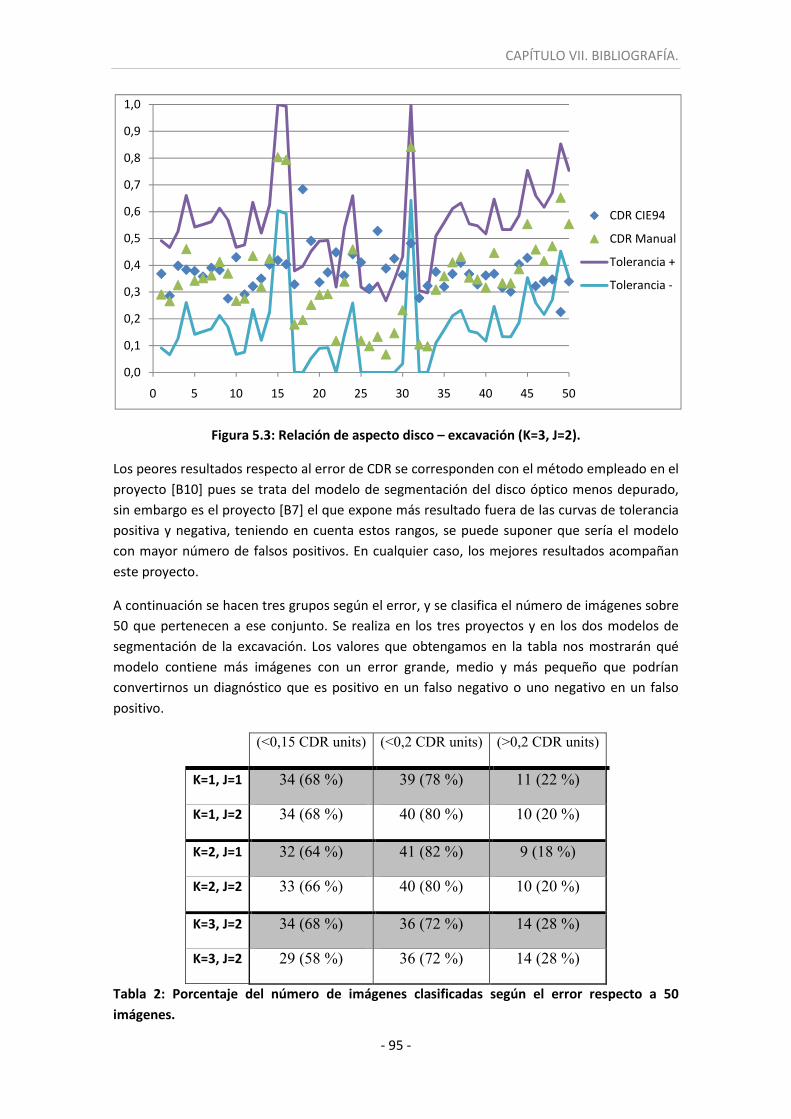
CAPÍTULO VII. BIBLIOGRAFÍA.
- 95 -
Figura 5.3: Relación de aspecto disco – excavación (K=3, J=2).
Los peores resultados respecto al error de CDR se corresponden con el método empleado en el
proyecto [B10] pues se trata del modelo de segmentación del disco óptico menos depurado,
sin embargo es el proyecto [B7] el que expone más resultado fuera de las curvas de tolerancia
positiva y negativa, teniendo en cuenta estos rangos, se puede suponer que sería el modelo
con mayor número de falsos positivos. En cualquier caso, los mejores resultados acompañan
este proyecto.
A continuación se hacen tres grupos según el error, y se clasifica el número de imágenes sobre
50 que pertenecen a ese conjunto. Se realiza en los tres proyectos y en los dos modelos de
segmentación de la excavación. Los valores que obtengamos en la tabla nos mostrarán qué
modelo contiene más imágenes con un error grande, medio y más pequeño que podrían
convertirnos un diagnóstico que es positivo en un falso negativo o uno negativo en un falso
positivo.
(<0,15 CDR units) (<0,2 CDR units) (>0,2 CDR units)
K=1, J=1 34 (68 %) 39 (78 %) 11 (22 %)
K=1, J=2 34 (68 %) 40 (80 %) 10 (20 %)
K=2, J=1 32 (64 %) 41 (82 %) 9 (18 %)
K=2, J=2 33 (66 %) 40 (80 %) 10 (20 %)
K=3, J=2 34 (68 %) 36 (72 %) 14 (28 %)
K=3, J=2 29 (58 %) 36 (72 %) 14 (28 %)
Tabla 2: Porcentaje del número de imágenes clasificadas según el error respecto a 50
imágenes.
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
0 5 10 15 20 25 30 35 40 45 50
CDR CIE94
CDR Manual
Tolerancia +
Tolerancia -

CAPÍTULO VII. BIBLIOGRAFÍA.
- 96 -
Estudiando grupo a grupo y comparando los tres proyectos, no vemos a penas diferencia
entre los dos primeros modelos, aunque estos sí mejoran respecto al tercero. Como en este
análisis no conseguimos nada concluyente, procederemos a realizar un examen más profundo
de la importancia del error en el diagnóstico del glaucoma. Para ello se evaluará el algoritmo
definiendo dos variables:
X= porcentaje con el que se predicen las personas del grupo de enfermo como enfermos.
Y= porcentaje con el que se predicen cualquiera del grupo sano como enfermos.
En este ensayo, se entenderá como Diagnóstico positivo verdadero si el CDR calculado por el
médico es mayor que 0,3 y el CDR calculado de forma automática también supera este umbral.
De este modo podemos distinguir cuatro casos que definimos a continuación:
a. Diagnóstico positivo correcto: CDR(manual)>0,3 y CDR(automático)>0,3
b. Diagnóstico negativo correcto: CDR(manual)<0,3 y CDR(automático)<0,3
c. Diagnóstico positivo falso: CDR(manual)<0,3 y CDR(automático)>0,3
d. Diagnóstico negativo falso: CDR(manual)>0,3 y CDR(automático)<0,3
1) K=1, J=2
Condiciones positivas Condiciones negativas
Diagnóstico positivo correcto 26 11 Diagnóstico falso positivo Predicción valor positivo � 2626 � 11 � 70,27%
Diagnóstico falso negativo 5 8 Diagnóstico negativo correcto Predicción valor negativo � 88 � 5 � 61,53%
u � 2626 � 5 � 83,87% v � 88 � 19 � 42,1%
2) K=2, J=2
Condiciones positivas Condiciones negativas
Diagnóstico positivo correcto 33 12 Diagnóstico falso positivo Predicción valor positivo � 3333 � 12 � 73,33%
Diagnóstico falso negativo 0 5 Diagnóstico negativo correcto Predicción valor negativo
� 50 � 5 � 100%
u � 3333 � 0 � 100% v � 512 � 5 � 29,41%
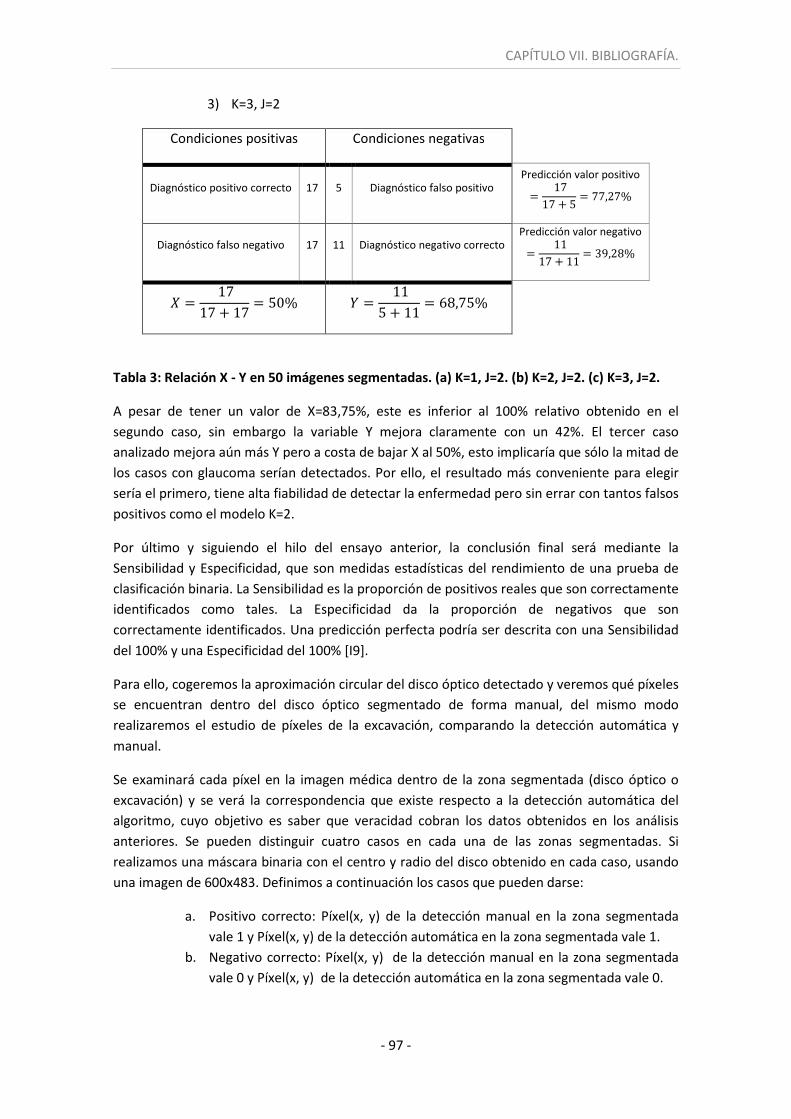
CAPÍTULO VII. BIBLIOGRAFÍA.
- 97 -
3) K=3, J=2
Condiciones positivas Condiciones negativas
Diagnóstico positivo correcto 17 5 Diagnóstico falso positivo Predicción valor positivo � 1717 � 5 � 77,27%
Diagnóstico falso negativo 17 11 Diagnóstico negativo correcto Predicción valor negativo � 1117 � 11 � 39,28%
u � 1717 � 17 � 50% v � 115 � 11 � 68,75%
Tabla 3: Relación X - Y en 50 imágenes segmentadas. (a) K=1, J=2. (b) K=2, J=2. (c) K=3, J=2.
A pesar de tener un valor de X=83,75%, este es inferior al 100% relativo obtenido en el
segundo caso, sin embargo la variable Y mejora claramente con un 42%. El tercer caso
analizado mejora aún más Y pero a costa de bajar X al 50%, esto implicaría que sólo la mitad de
los casos con glaucoma serían detectados. Por ello, el resultado más conveniente para elegir
sería el primero, tiene alta fiabilidad de detectar la enfermedad pero sin errar con tantos falsos
positivos como el modelo K=2.
Por último y siguiendo el hilo del ensayo anterior, la conclusión final será mediante la
Sensibilidad y Especificidad, que son medidas estadísticas del rendimiento de una prueba de
clasificación binaria. La Sensibilidad es la proporción de positivos reales que son correctamente
identificados como tales. La Especificidad da la proporción de negativos que son
correctamente identificados. Una predicción perfecta podría ser descrita con una Sensibilidad
del 100% y una Especificidad del 100% [I9].
Para ello, cogeremos la aproximación circular del disco óptico detectado y veremos qué píxeles
se encuentran dentro del disco óptico segmentado de forma manual, del mismo modo
realizaremos el estudio de píxeles de la excavación, comparando la detección automática y
manual.
Se examinará cada píxel en la imagen médica dentro de la zona segmentada (disco óptico o
excavación) y se verá la correspondencia que existe respecto a la detección automática del
algoritmo, cuyo objetivo es saber que veracidad cobran los datos obtenidos en los análisis
anteriores. Se pueden distinguir cuatro casos en cada una de las zonas segmentadas. Si
realizamos una máscara binaria con el centro y radio del disco obtenido en cada caso, usando
una imagen de 600x483. Definimos a continuación los casos que pueden darse:
a. Positivo correcto: Píxel(x, y) de la detección manual en la zona segmentada
vale 1 y Píxel(x, y) de la detección automática en la zona segmentada vale 1.
b. Negativo correcto: Píxel(x, y) de la detección manual en la zona segmentada
vale 0 y Píxel(x, y) de la detección automática en la zona segmentada vale 0.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 98 -
c. Positivo falso: Píxel(x, y) de la detección manual en la zona segmentada vale 0
y Píxel(x, y) de la detección automática en la zona segmentada vale 1.
d. Negativo falso: Píxel(x, y) de la detección manual en la zona segmentada vale
1 y Píxel(x, y) de la detección automática en la zona segmentada vale 0.
K=1, J=2
Sensibilidad
(D.O.)
K=1, J=2
Sensibilidad
(Excavación)
K=2, J=2
Sensibilidad
(D.O.)
K=2, J=2
Sensibilidad
(Excavación)
\ 88.90% 59.77% 93.72% 58.67%
` 14.16% 21.23% 16.62% 24.34%
Tabla 4: Medidas estadísticas de la Sensibilidad en 50 imágenes segmentadas. (a) K=1, J=2
Disco óptico. (b) K=1, J=2 Excavación. (c) K=2, J=2 Disco óptico. (d) K=2, J=2 Excavación.
K=1, J=2
Especificidad
(D.O.)
K=1, J=2
Especificidad
(Excavación)
K=2, J=2
Especificidad
(D.O.)
K=2, J=2
Especificidad
(Excavación)
\ 98.68% 99.66% 98.53% 99.76%
` 1.50% 0.52% 1.30% 0.43%
Tabla 5: Medidas estadísticas de la Especificidad en 50 imágenes segmentadas. (a) K=1, J=2
Disco óptico. (b) K=1, J=2 Excavación. (c) K=2, J=2 Disco óptico. (d) K=2, J=2 Excavación.
Hemos visto los resultados conseguidos en los dos algoritmos mejores de los tres analizados,
ya que el tercero no da aporte de información y ya en este punto queda excluido.
La conclusión obtenida es la esperada, el error cometido a la hora de segmentar la zona de la
excavación es mayor y por eso, las sensibilidades en ambos modelos decaen, esto se debe a
que las dimensiones de la zona es menor y por ello las dificultades se incrementan. Sin
embargo la especificidad ronda el 99%, conociendo que el modelo de máscara sería como el
mencionado en la figura 4.3, este contiene un alto número de píxeles negros y el error
cometido en falsos negativos sería insignificante respecto a estos, si el número de píxeles
negros ronda 70000 y la variación de falsos negativos oscila entre 300 y 500, la especificidad
no variará más del 1%.

CAPÍTULO VI: CONCLUSIONES Y LÍNEAS
FUTURAS.
1.- CONCLUSIONES. Como vimos en el Capítulo I, el objetivo era la localización de los vasos sanguíneos en
retinografía, la detección del disco óptico y por último la segmentación de la excavación.
Después de ver los resultados de error expuestos en el Capítulo V, se demuestra que el
algoritmo propuesto, gracias en su mayor parte al uso del espacio de color CIE L*a*b*, es
capaz de localizar y detectar el disco óptico en la gran mayoría de los casos. A diferencia de lo
que ocurre en otros proyectos con técnicas [B7] basadas en RGB, cuando el plano rojo de la
imagen original es demasiado brillante que el contorno resultante no se corresponde con el
disco óptico real, ya que la detección se fundamenta en la variación de la intensidad medida en
este plano y por tanto la detección de la excavación empeora. Aunque el número de valores
numéricos posibles por cada píxel es menor en L*a*b* que en RGB, tiene dos ventajas
importantes ya que es posible referenciar una cantidad superior de colores en total y
además se consigue emular la respuesta no lineal del ojo.
En un gran porcentaje de casos se realiza una determinación de la red de vasos, que
manualmente sería inconcebible, y en el peor de los casos el resultado es más que aceptable.
Con respecto a la excavación, los resultados quedan corroborados como para asegurar que la
relación de radio disco-excavación mantendrá un error medio bastante bajo, dando suficiente
confianza en el diagnóstico de enfermedades.
Por tanto, podríamos resumir que el producto de este algoritmo mejora las soluciones habidas
hasta el momento en esta línea de investigación.
2.- LÍNEAS FUTURAS. Como posibles líneas futuras se proponen:
o Diseñar un entorno gráfico que permita la interacción con el usuario, de forma
que se pueda tratar la imagen en caso de que las condiciones para la
segmentación no sean óptimas. Por ejemplo cambiándose valores previos al
tratamiento de la imagen de fondo como el contraste, brillo, color...
o Mejorar el algoritmo creado en este proyecto en el que se intenta eliminar la
constante inicial “número de iteraciones de la Snake”. Del mismo modo se
podría ver como el eliminar otras constantes que no han sido tratadas.
o Estudio de espacios de color basados en modelos de apariencia de color como
CIE CAM02.

CAPÍTULO VII: BIBLIOGRAFÍA. [B1].- Patton, N., et al. “Retinal Image Analysis: Concepts, Applications and Potential”. Progress
in Retinal and Eye Research, 2006, vol. 25, no. 1. pp. 99-127.
[B2].- Fernández Fernández, I.; Ruiz Aragón, J. y Pascual de la Pisa, B. “Efectividad Del Control
De Fondo De Ojo En Pacientes Con Diabetes e Hipertensión”. FMC - Formación Médica
Continuada En Atención Primaria, 2007, vol. 14, no. 4. pp. 176-186.
[B3].- Walter T. y Klein J.C. “Segmentation of Color Fundus Images of the Human Retina:
Detection of the Optic Disc and the Vascular Tree using Morphological Techniques”. Medical
Data Analysis, Lecture notes in Computer Science, 2001, Vol. 2199/2001, pp. 282–287.
[B4].- Kande, G.B.; Venkata Subbaiah, P. y Satya Savithri, T. “Segmentation of Exudates and
Optic Disk in Retinal Images”. Sixth Indian Conference on Computer Vision, Graphics & Image
Processing, 2008. pp. 535-542.
[B5].- Vermeer, K.A., et al. “A Model Based Method for Retinal Blood Vessel Detection”.
Computers in Biology and Medicine, 34, 2004, pp. 209-219.
[B6].- Rodríguez Rodríguez, M. “Detección de vasos en imágenes de fondo de ojo”. Proyecto
Fin de Carrera, Universidad de Sevilla, 2008.
[B7].- Mercerdes Tirado, M. “Detección del disco óptico y caracterización de los vasos
sanguíneos en imágenes de fondo de ojo”. Proyecto Fin de Carrera, Universidad de Sevilla,
2012.
[B8].- Lee, S. S., et al. “Screening of Diabetic Retinopathy - Automatic Segmentation of Optic
Disc in Colour Fundus Images”. The 2nd International Conference on Distributed Frameworks
for Multimedia Applications, 2006. pp. 1-7.
[B9].- Heneghan, C., et al. “Characterization of Changes in Blood Vessel Width and Tortuosity
in Retinopathy of Prematurity using Image Analysis”. Medical Image Analysis, 12, 2002, Vol. 6,
no. 4. pp. 407-429.
[B10].- Campilho, Aurelio; Kamel, Mohamed, et al. “Automatic cup-to-disc ratio estimation
using active contours and color clustering in fundus images for glaucoma diagnosis”. Image
Analysis and Recognition.
[B11].- Chaichana, T., et al. “Edge Detection of the Optic Disc in Retinal Images Based on
Identification of a Round Shape”. International Symposium on Communications and
Information Technologies, 2008. pp. 670-674.
[B12].- National Eye Institute. “El Glaucoma: Lo que usted debe saber”. Revisado 9/2003.
[B13].- National Eye Institute. “La Degeneración Macular Asociada con la Edad: Lo que usted
debe saber”. Revisado 9/2003.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 101 -
[B14].- Abdel-Razik Youssif, A. A. H; Ghalwash, A. Z. y Abdel-Rahman Ghoneim, A. A. S. “Optic
Disc Detection from Normalized Digital Fundus Images by Means of a Vessels' Direction
Matched Filter”. IEEE Transactions on Medical Imaging, 2008, vol. 27, no. 1. pp. 11-18.
[B15].- Zhu, X.; RanGayyan, R. M. y Ells, A. L. “Detection of the Optic Nerve Head in Fundus
Images of the Retina using the Hough Transform for Circles”. Journal of Digital Imaging, 2010,
vol. 23, no. 3. pp. 332-341.
[B16].- Sinthanayothin, C., et al. “Automated Localisation of the Optic Disc, Fovea, and Retinal
Blood Vessels from Digital Colour Fundus Images”. British Journal of Ophthalmology, 1999, vol.
83, no. 8. pp. 902-910.
[B17].- Morales España, G.; Mora Flórez, J. y Vargas Torres, H. “Estrategia de regresión basada
en el método de los k vecinos más cercanos para la estimación de la distancia de falla en
sistemas radiales”. Revista Facultad de Ingeniería de la Universidad de Antioquía (Colombia),
no. 45, 2008.
[B18].- González, R. C.; Woods, R. E. y Eddins, S.L. “Digital Image Processing using MATLAB”.
Pearson Prentice Hall,2004.
[B19].- Mémoli, F.; Pardo, A. y Ribeiro A. “Difusión anisotrópica”. Simposio Iberoamericano de
Reconocimiento de Patrones, SIARP. La Habana, Cuba, 1999.
[B20].- Perona, P. y Malik, J. “Scale-Space and Edge Detection using Anisotropic Diffusion”.
IEEE Transactions on Pattern Analysis and Machine Intelligence, 1990, vol. 12, no. 7., pp. 629-
639.
[B21].- De Boor, C. “A Practical Guide to Splines”, Springer-Verlag, 2004, pp.449-450.
[B22].- Herold García, S. y Escobedo Nicot, M. “Segmentación de imágenes médicas aplicando
snakes”. Ciencia en su PC, no. 4, 2007.
[B23].- R. Varma, G. L. Spaeth, W. C. Steinmann & L. J. Katz, "Agreement between clinicians
and an image analyzer in estimating cup-to-disc ratios", Arch Opthalmol, 107(4), pp. 526–529,
1989.

CAPÍTULO VII. BIBLIOGRAFÍA.
- 102 -
REFERENCIAS EN INTERNET. [I1].- Grupo oftalmológico:
http://www.horusgo.com/elojo.html
[I2].- Consulta Oftalmológica Virtual de la Dra. Laguna:
http://www.e-oftalmologia.com/index.html
[I3].- Imagen Digital 4.0 :
http://gusgsm.com/espacio_color_cie_L*a*b*
[I4].- Review of optometry online:
http://cms.revoptom.com/index.asp?ArticleType=SiteSpec&Page=osc/3146/lesson.htm
[I5].- Área clínica de la Facultad de Medicina de la Universidad Autónoma de Guadalajara.
http://kepler.uag.mx/uagwbt/oftav10/Fo%20normal/FO%20normal.htm
[I6] American Academy of Ophthalmology:
http://www.geteyesmart.org/eyesmart/diseases-es/retinopatia-diabetica.cfm
[I7] Revista de medicina online:
http://norefiere.com.ar/2012/02/90-millones-de-personas-sufririan-retinopatia-diabetica-en-
el-mundo/
[I8] American Health Assistance Foundation:
http://www.ahaf.org/espanol/tiposglaucoma.html
[I9] Revista de salud:
http://www.mejorartuvision.com/tag/mejorar-tu-vista-sin-gafas/
[I9] Enciclopédia online:
http://en.wikipedia.org/wiki/Sensitivity_and_specificity