







Idiomas
Páginas
Jurídico

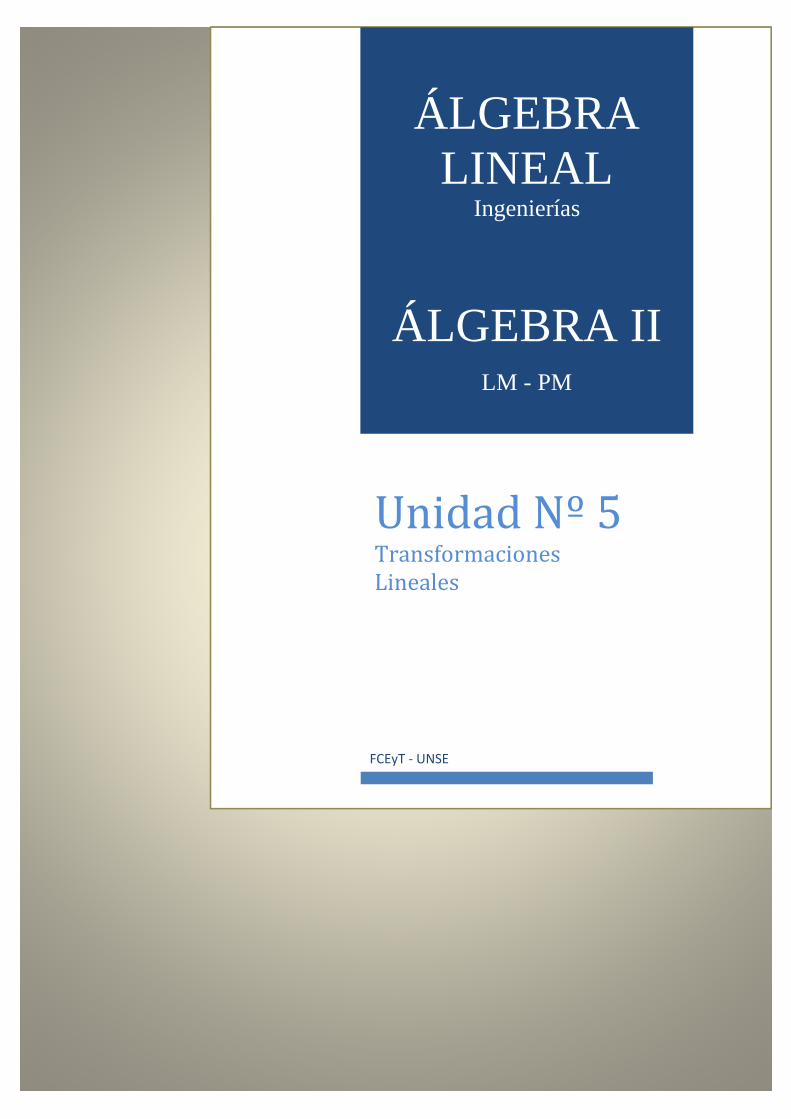
ÁLGEBRA
LINEAL Ingenierías
ÁLGEBRA II LM - PM
Unidad Nº 5 Transformaciones
Lineales
FCEyT - UNSE
Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 1
Unidad Nº 5: TRANSFORMACIONES LINEALES Definición
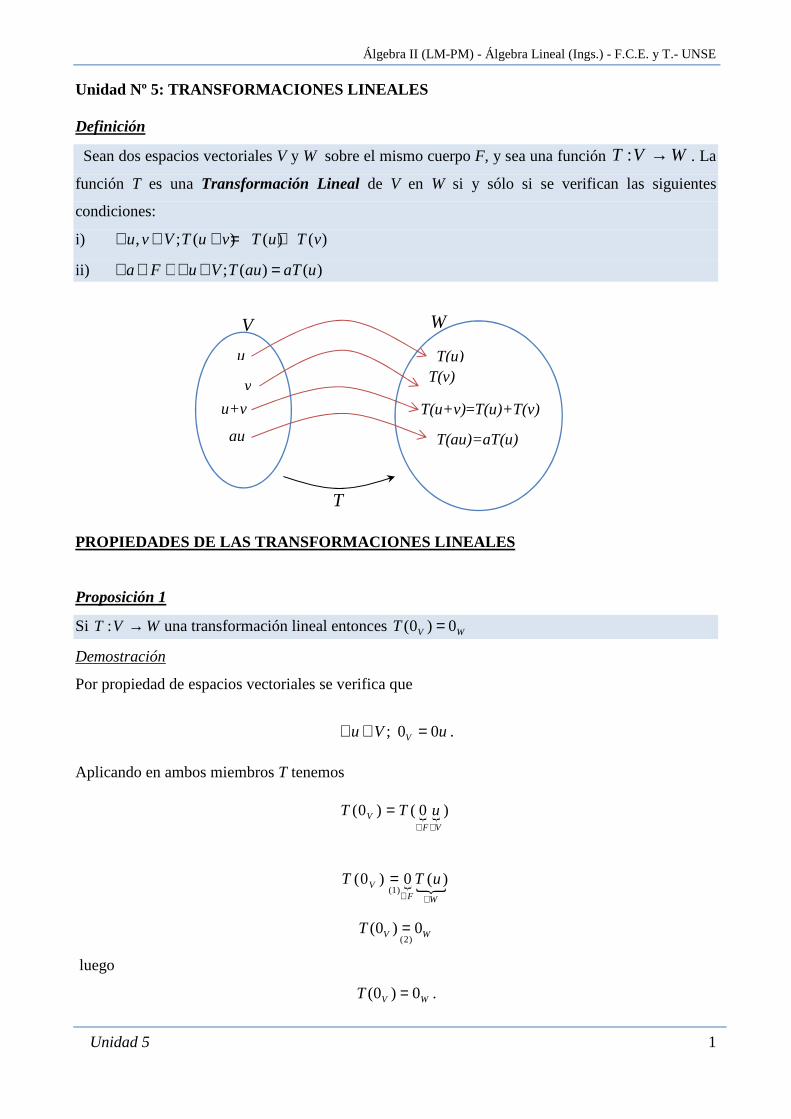
Sean dos espacios vectoriales V y W sobre el mismo cuerpo F, y sea una función WVT →: . La
función T es una Transformación Lineal de V en W si y sólo si se verifican las siguientes
condiciones:
i) , ; ( ) ( ) ( )u v V T u v T u T v∀ ∈ + = +
ii) )()(; uaTauTVuFa =∈∀∧∈∀
PROPIEDADES DE LAS TRANSFORMACIONES LINEALES
Proposición 1
Si WVT →: una transformación lineal entonces WVT 0)0( =
Demostración
Por propiedad de espacios vectoriales se verifica que
uVu V 00 ; =∈∀ .
Aplicando en ambos miembros T tenemos
� � )0()0(VF
V uTT∈∈
=
��WF
V uTT∈∈
= )(0 )0()1(
WVT 0)0()2(
=
luego
WVT 0)0( = .
V W
u
v
u+v
T(u) T(v)
T(u+v)=T(u)+T(v)
T
au T(au)=aT(u)

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 2
Referencias: (1) Por Ax. 2 de definición de transformación lineal. (2) Por propiedad de espacio vectorial.
Q.E.D.
Proposición 2
Si WVT →: una transformación lineal entonces
)()( ; uTuTVu −=−∈∀
Demostración
� � )()()1()1()()2()1(
uTuTuTuTVF
−=−=
−=−∈∈
Luego:
)()( uTuT −=−
Referencias: (1) Por Ax. 2 de definición de transformación lineal. (2) Por propiedad de espacio vectorial.
Q.E.D.
Proposición 3
Si WVT →: una transformación lineal entonces
)(;,11
i
n
ii
n
iiiii uTauaTVuFa ∑∑
==
=
∈∀∈∀ (α)
Demostración:
Se demuestra por inducción en n
� n =1
∑∑==
===
1
111
)1(11
1
1
)()()(i
iii
ii uTauTauaTuaT
Luego la proposición (α) es verdadera para n = 1.
� Suponemos que la proposición (α) es verdadera para n=h, es decir que
(2)1 1
( )h h
i i i ii i
T a u a T u= =
= ∑ ∑
� Bajo este supuesto, probaremos que la proposición (α) es verdadera para n=h+1, es decir
)(1
1
1
1∑∑
+
=
+
=
=
h
iii
h
iii uTauaT

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 3
En efecto,
( )
( )
1
1 1 1 1(3) (4)
1 1 1
1
1 1(5) (6)1 1
( ) ( )
h h h
i i i i h h i i h hi i i
h h
i i h h i ii i
T a u T a u a u T a u T a u
a T u a T u a T u
+
+ + + += = =
+
+ += =
= + = + =
= + =
∑ ∑ ∑
∑ ∑
Luego la proposición se cumple para todo n natural.
Referencias:
(1) Por Ax. 2 de transformación lineal. (2) Por Ax. 2 de transformación lineal. (3) Por propiedad de las sumas finitas. (4) Por Ax. 1 de transformación lineal. (5) Por hipótesis inductiva y por Ax. ii) de la definición de transformación lineal. (6) Por propiedad de las sumas finitas.
Q.E.D.
Núcleo de una transformación lineal Sea WVT →: una transformación lineal: Definición
El núcleo de T es el conjunto de vectores Vu∈ , tales que su imagen es el vector nulo de W. En símbolos:
{ }/ ( ) 0def
T WN u V T u= ∈ =
V W
T . . .
Es claro que,
( ) 0T Wu N T u∈ ⇔ =
Propiedades del núcleo de una transformación lineal
Proposición 4
Sea WVT →: una transformación lineal. El núcleo de T es un subespacio vectorial del espacio vectorial V.
. u . . . .
NT
. .
. . .
. . 0W . . . .
. . . . . . . . .

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 4
Demostración:
i) TN V⊂ por definición de NT.
ii) TN ≠ ∅ , pues 0V TN∈ ya que WVT 0)0( = por Proposición 1 de transformaciones lineales.
iii) , T Tu v N u v N∈ ⇒ + ∈ En efecto:
(1)
(2) (3) (4)
, ( ) 0 ( ) 0
( ) ( ) ( ) 0 0 0
T W W
W W W T
u v N T u T v
T u v T u T v u v N
∈ ⇒ = ∧ =
+ = + = + = ⇒ + ∈
Luego Tu v N+ ∈
iv) T Ta F u N au N∈ ∧ ∈ ⇒ ∈
En efecto:
(5)
(6) (7) (8)
( ) 0
( ) ( ) 0 0
T W
W W T
a F u N a F T u
T au aT u a au N
∈ ∧ ∈ ⇒ ∈ ∧ =
= = = ⇒ ∈
Luego Tau N∈
Por lo tanto por i), ii), iii) y iv), el núcleo de T es un subespacio vectorial de de V. Referencias (A completar por el alumno)
(1) (2) (3) (4) (5) (6) (7) (8)
Q.E.D. Proposición 5
Sea :T V W→ una transformación lineal. { }0 T VN = ⇔ T es inyectiva.
(Sin demostración) Imagen de una transformación lineal Sea WVT →: una transformación lineal: Definición
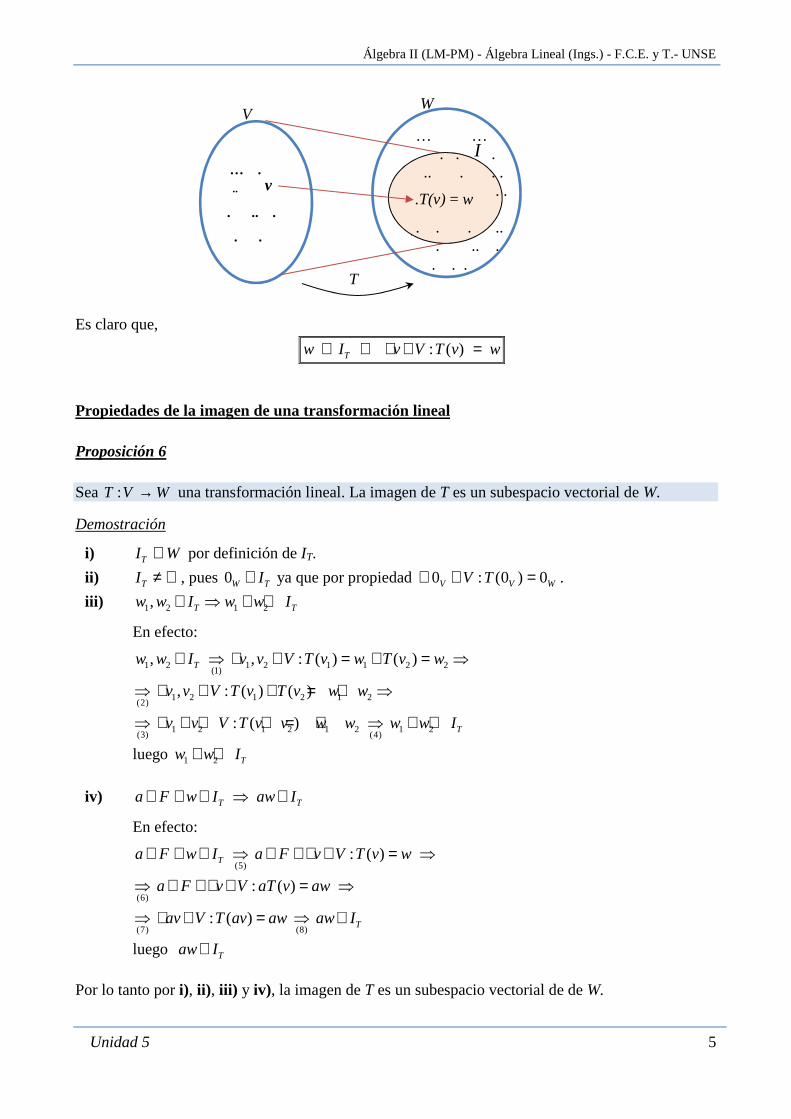
La imagen de T es el conjunto de vectores de W, que tienen preimagen en V. En símbolos:
{ }/ : ( )def
TI w W v V T v w= ∈ ∃ ∈ =
Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 5
Es claro que,
: ( ) Tw I v V T v w∈ ⇔ ∃ ∈ = Propiedades de la imagen de una transformación lineal
Proposición 6
Sea WVT →: una transformación lineal. La imagen de T es un subespacio vectorial de W.
Demostración
i) TI W⊂ por definición de IT.
ii) TI ≠ ∅ , pues 0W TI∈ ya que por propiedad 0 : (0 ) 0V V WV T∃ ∈ = .
iii) 1 2 1 2, T Tw w I w w I∈ ⇒ + ∈
En efecto:
1 2 1 2 1 1 2 2(1)
1 2 1 2 1 2(2)
1 2 1 2 1 2 1 2(3) (4)
, , : ( ) ( )
, : ( ) ( )
: ( )
T
T
w w I v v V T v w T v w
v v V T v T v w w
v v V T v v w w w w I
∈ ⇒ ∃ ∈ = ∧ = ⇒
⇒ ∃ ∈ + = + ⇒
⇒ ∃ + ∈ + = + ⇒ + ∈
luego 1 2 Tw w I+ ∈
iv) T Ta F w I aw I∈ ∧ ∈ ⇒ ∈
En efecto:
(5)
(6)
(7) (8)
: ( )
: ( )
: ( )
T
T
a F w I a F v V T v w
a F v V aT v aw
av V T av aw aw I
∈ ∧ ∈ ⇒ ∈ ∧ ∃ ∈ = ⇒
⇒ ∈ ∧ ∃ ∈ = ⇒
⇒ ∃ ∈ = ⇒ ∈
luego Taw I∈ Por lo tanto por i), ii), iii) y iv), la imagen de T es un subespacio vectorial de de W.
I T .
. .
… . .. v
. .. .
. .
.T(v) = w
… … . . . .. . . . . . . . . .. . .. . . . .
V W
T

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 6
Referencias:
(1) Por definición de imagen de T. (2) Por (+) en W. (3) Por (+) en V y por Ax. 1 de transformación lineal. (4) Por definición de imagen de T. (5) Por definición de imagen de T. (6) Por (.) en W. (7) Por (.) en V y por Ax. 2 de transformación lineal. (8) Por definición de imagen de T.
Q.E.D. Proposición 7
Sea :T V W→ una transformación lineal. TI W= ⇔ T es sobreyectiva.
Demostración
El enunciado coincide con la definición de sobreyectividad.
Teorema de las dimensiones del núcleo y la imagen
Sea WVT →: una transformación lineal y sea V de dimensión finita n, entonces:
dim dim dimT TN I V+ =
Demostración (sin demo para ING)
1) T
I tiene dimensión finita.
Sabiendo que cualquier base de V es finita, se deduce que T
I tiene dimensión
finita. En efecto si },...,,{21 rwww es un conjunto linealmente independiente en
TI , entonces existe u conjunto linealmente independiente en V { }rvvv ,...,,
21 tal
que:
ii wvTri ==∀ )(:,...,1 .
Esto significa que si T
I no tuviera dimensión finita, entonces V no tendría
dimensión finita.
2) Sea },...,,{21 pxxx una base de
TN .
� Si n=p, entonces VNT
= y 0dim =T
I , pues en este caso es: { }VT
I 0= .

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 7
x2
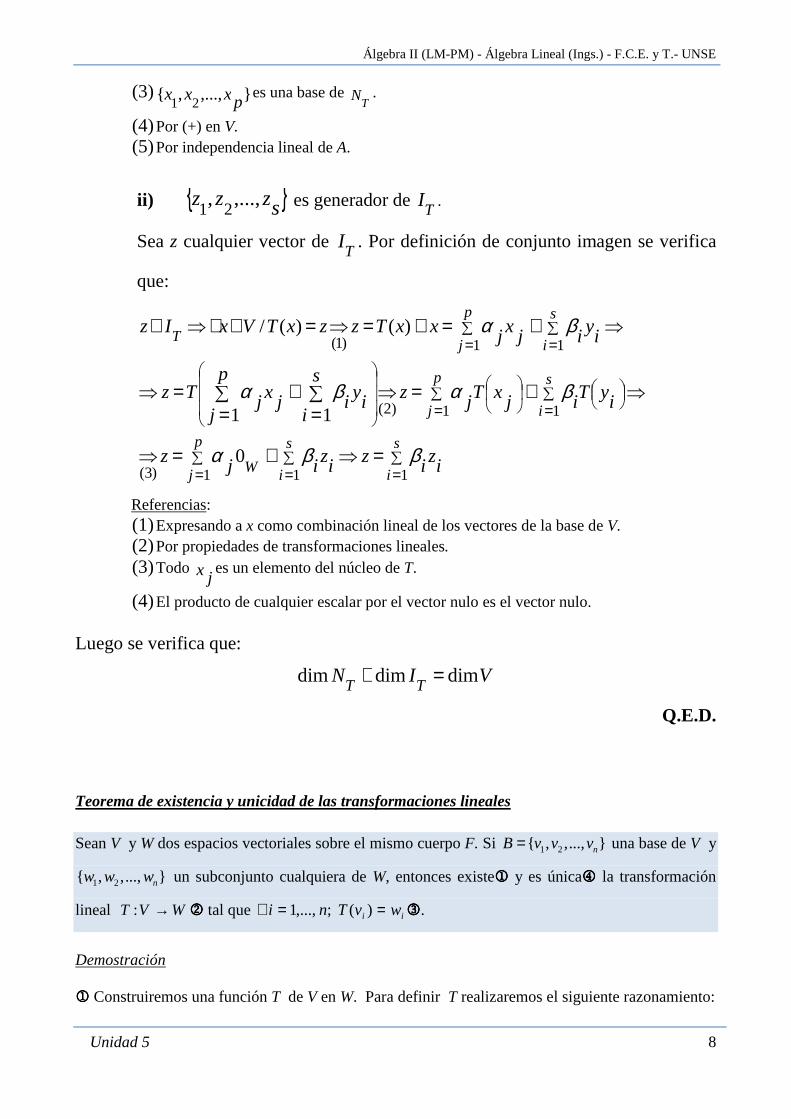
� Si p<n, entonces, por el teorema de extensión, existen syyy ,...,,21 en V,
tales que:
},...,,,,...,,{2121 syyypxxxA=
es una base de V.
Se tiene p+s=n y el teorema se reduce a probar que sIT
=dim .
Consideremos las imágenes de los vectores syyy ,...,,21 ; sean éstas:
ii zyTsi ==∀ )(:,...,1 (ζ).
Demostraremos que { }szzz ,...,,21 es una base de
TI . En efecto:
i) { }szzz ,...,,21 es linealmente independiente.
Sea: W
s
i izi 01
=∑=
α
Por (ζ):
.,;00
0
01
0)(
)5(
11)4(11)3(
1)2()1(1
ji
iyijxjjxjiyi
Niyi
s
iiyiTiyTi
jj
V
s
i
p
j
p
j
s
i
T
s
iWW
s
i
∀∀=∧=⇒
⇒=−⇒=⇒
⇒∈⇒=∑=
⇒=
∑=
∑=
∑=
∑=
∑=
∑=
αβ
αββα
ααα
Referencias: (1) Por proposición 3 de transformaciones lineales. (2) Por definición de núcleo de T.
yn y1
W V W
T(yi)=zi
T
xn 0W
: .:
NT x1
y2 yi ...
...
IT
Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 8
(3) },...,,{21 pxxx es una base de
TN .
(4) Por (+) en V. (5) Por independencia lineal de A.
ii) { }szzz ,...,,21 es generador de
TI .
Sea z cualquier vector de T
I . Por definición de conjunto imagen se verifica
que:
∑=
∑=
∑=
∑=
∑
=
∑=
∑=
=⇒+=⇒
⇒+=⇒∑=
+∑=
=⇒
⇒+=∧=⇒=∈∃⇒∈
s
i
s
i
p
j W
s
i
p
j
s
i
p
jT
izizizijz
iyTijxTjzs
iiyi
p
jjxjTz
iyijxjxxTzzxTVxIz
111)3(
11)2(
11)1(
0
11
)()(/
ββα
βαβα
βα
Referencias: (1) Expresando a x como combinación lineal de los vectores de la base de V. (2) Por propiedades de transformaciones lineales. (3) Todo
jx es un elemento del núcleo de T.
(4) El producto de cualquier escalar por el vector nulo es el vector nulo.
Luego se verifica que:
VINTT
dimdimdim =+
Q.E.D.
Teorema de existencia y unicidad de las transformaciones lineales
Sean V y W dos espacios vectoriales sobre el mismo cuerpo F. Si 1 2{ , ,..., }nB v v v= una base de V y
1 2{ , ,..., }nw w w un subconjunto cualquiera de W, entonces existe1111 y es única4444 la transformación
lineal WVT →: 2222 tal que ii wvTni ==∀ )( ;,...,1 3333.
Demostración 1111 Construiremos una función T de V en W. Para definir T realizaremos el siguiente razonamiento:

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 9
Por hipótesis B es una base de V, en consecuencia
Si Vu ∈ entonces existen y son únicos los escalares 1 2, ,..., na a a F∈ tales que u se escribe como
combinación lineal de vectores de B, esto es
��∑= ∈∈
=n
i B
i
F
i vau1
Definimos ahora
∑∑==
=
=n
iii
defn
iii wavaTuT
11
)( .
Es claro que para cada vector
u = ∑=
n
iii va
1
∈ V
existe un único vector
∑∑==
∈=
=n
iii
defn
iii WwavaTuT
11
)(
debido a la unicidad de las coordenadas 1 2, ,..., na a a F∈ de cada vector u respecto a la base B de V.
Por lo tanto queda bien definida la función
∑∑
==
=
=
→n
iii
defn
iii wavaTuTu
WVT
11
)(
:
֏
2222 Probaremos ahora que la función T así definida es una transformación lineal.
i) , ( ) ( ) ( )u v V T u v T u T v∈ ⇒ + = +
En efecto,
(1) ( 2 )1 1
, n n
i i i ii i
u v V u a v v b v= =
∈ ⇒ = ∧ =∑ ∑
Con ai ∈ F, bi ∈ F (coordenadas de u y v respectivamente) y vi ∈ B; ∀ i = 1, 2, …, n
Ahora obtengamos la imagen del vector u + v a través de la función T
( ) ( )( )( )( ) ( )
(3)1 1 1
(4)1 1 1
(5) (6)1 1
( )
( )
( ) ( )
n n n
i i i i i i i ii i i
n n n
i i i i i i i i iii i i
n n
i i i ii i
T u v T a v b v T a v b v
T a b v a b w a w b w
a w b w T u T v
= = =
= = =
= =
+ = + = + =∑ ∑ ∑
+ = + = + =∑ ∑ ∑
= + = +∑ ∑
Referencias:

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 10
(1) Los n escalares ia son las coordenadas de u respecto de la base B de V.
(2) Los n escalares ib son las coordenadas de v respecto de la base B de V.
(3) Se aplica propiedad de las sumas finitas y la distributividad del producto por escalares respecto a la
suma de escalares en el espacio vectorial V. El lector puede probar que los n escalares ia + i
b son
las coordenadas del vector u+v respecto de la base B de V. (4) Por definición de la función T.
(5) Como W es un espacio vectorial, vale la distributividad del producto por escalares respecto a la suma d escalares. Se aplica también propiedad de las sumas finitas.
(6) Por definición de la función T.
ii) ( ) ( )F u V T u T uα α α∈ ∧ ∈ ⇒ =
En efecto
(1) 1
n
i ii
F u V F u a vα α=
∈ ∧ ∈ ⇒ ∈ ∧ = ∑
Obtengamos ahora la imagen a través de la función T del vector α u
( ) ( )( ) ( )(2) (3)1 1 1
(4) (5)1
( )
( )
n n n
i i i i i ii i i
n
i ii
T u T a v T a v a w
a w T u
α α α α
α α
= = =
=
= = = =∑ ∑ ∑
= =∑
Referencias:
(1) Los n escalares ia son las coordenadas de u respecto de la base B de V.
(2) Por distributividad del producto por escalares respecto a la suma de vectores en el espacio vectorial V. El lector puede probar que lo n escalares αai son las coordenadas del vector αu respecto de la base B de V.
(3) Por definición de la función T. (4) Por distributividad del producto por escalares respecto a la suma de vectores en es espacio
vectorial W. (5) Por definición de la función T.
Luego por i) y ii) la función T es una transformación lineal.
3333 Mostraremos que
1,..., ; ( )i ii n T v w∀ = =
En efecto, como entonces 1,..., ; 1,..., ; i ii n v B i n v V∀ = ∈ ∀ = ∈
por lo tanto existen y son únicos los escalares que permiten escribir a cada vector vi como
combinación de todos los vectores de la base B de V, esto es

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 11
1 1 2
2 1 2
1 2
1 0 ... 0
0 1 ... 0
0 0 ... 1
n
n
n n
v v v v
v v v v
v v v v
= + + += + + +
= + + +⋮
Entonces las imágenes de cada uno de los vectores de la base B del espacio vectorial V vienen dadas
por,
( )
( )
( )
.
1 1 2 1 2 1
.
2 1 2 1 2 2
.
1 2 1 2
( ) 1 0 ... 0 1 0 ... 0
( ) 0 1 ... 0 0 1 ... 0
( ) 0 0 ... 1 0 0 ... 1
def de la funciónT
n n
def de la funciónT
n n
def de la funciónT
n n n n
T v T v v v w w w w
T v T v v v w w w w
T v T v v v w w w w
= + + + = + + + =
= + + + = + + + =
= + + + = + + + =
⋮
luego
1,..., : ( )i ii n T v w∀ = = .
4444 La transformación lineal
1 1
: / ( ) n ndef
i i i ii i
T V W T u T a v a w= =
→ = = ∑ ∑ es única.
En efecto, sea WVG →: una transformación lineal tal que
1,..., : ( )i ii n G v w∀ = = .
probaremos que G = T, que es equivalente a probar que para cada vector u del espacio vectorial V
se verifica que la imagen de u a través de G y la imagen de u a través de T son iguales. Esto es,
G = T ⇔ )()( ; uTuGVu =∈∀
entonces
)( )( )( ;11
)1(1
uTwavGavaGuGVun
iii
n
iii
n
iii ∑∑∑
===
===
=∈∀
luego G = T, es decir T es única.
Referencia:
(1) Por propiedad de las transformaciones lineales.
Q.E.D.
Nota
Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 12
El Teorema precedente nos muestra que cualquier transformación lineal T de V en W queda
unívocamente determinada si se conocen las imágenes de los vectores de una base dada del espacio
vectorial V.
Teorema de la matriz asociada a una transformación lineal
Sean V un espacio vectorial de dimensión n sobre el cuerpo F, y sea W un espacio vectorial de
dimensión m sobre F. Sea B una base de V y C una base de W. Para cada transformación lineal T
de V en W, existe una única matriz nmFA x∈ , tal que
[ ] [ ]; ( )C B
x V T x A x∀ ∈ = .
Demostración
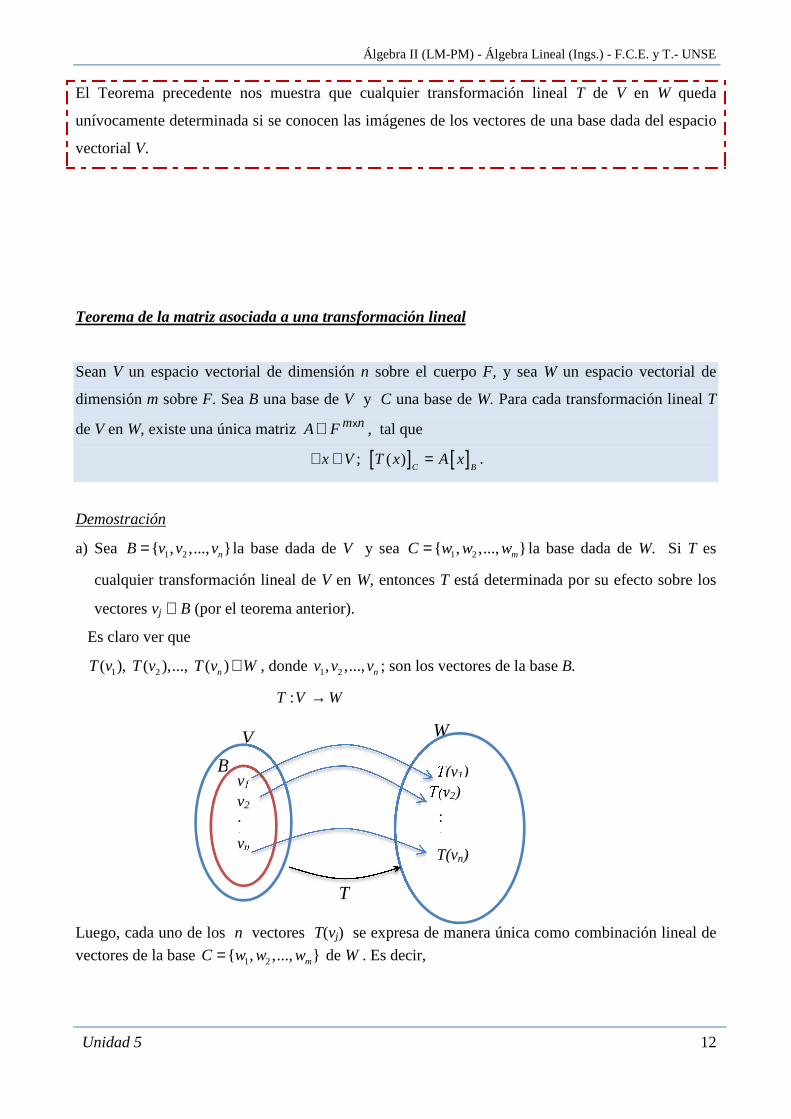
a) Sea 1 2{ , ,..., }nB v v v= la base dada de V y sea 1 2{ , ,..., }mC w w w= la base dada de W. Si T es
cualquier transformación lineal de V en W, entonces T está determinada por su efecto sobre los
vectores vj ∈ B (por el teorema anterior).
Es claro ver que
1 2( ), ( ),..., ( )nT v T v T v W∈ , donde 1 2, ,..., nv v v ; son los vectores de la base B.
WVT →:
Luego, cada uno de los n vectores T(vj) se expresa de manera única como combinación lineal de
vectores de la base 1 2{ , ,..., }mC w w w= de W . Es decir,
V W
T(v1) T(v2)
T
vn T(vn)
: .:
B
v2
v1
: .:

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 13
211 11 1 2 1 11
2 12 1 22 2 2 21
1 1 2 21
( ) ...
( ) ...
( ) ...
m
m m i ii
m
m m i ii
m
n n n mn m in ii
T v a w a w a w a w
T v a w a w a w a w
T v a w a w a w a w
=
=
=
= + + + = ∑
= + + + = ∑
= + + + = ∑
⋮
Es decir:
1 1 2 21
1,..., ; ( ) ...m
j j j mj m ij ii
j n T v a w a w a w a w=
∀ = = + + + = ∑ (γ)
Los m escalares aij son las coordenadas del vector T(vj) respecto a la base C de W. En consecuencia, las coordenadas de estos vectores respecto de la base C de W son
[ ] [ ] [ ]111 12
21 22 21 2
1 2
( ) , ( ) , ..., ( )
n
nnC C C
m m mn
aa a
a a aT v T v T v
a a a
= = =
⋮ ⋮ ⋮
por lo tanto, la transformación lineal T está determinada por los mxn escalares aij a través de la proposición (γ) La matriz A cuyo elemento genérico es aij viene dada por
[ ] [ ] [ ]1 2
11 12 1
21 22 2
1 2
( ) ( ) ... ( )
A
nC C C
n
n m n
m m mn
T v T v T v
a a a
a a aF
a a a
×
↓ ↓ ↓ = ∈
⋯
⋯
⋮ ⋮ ⋱ ⋮
⋯
Esta matriz A es única debido a la unicidad de las coordenadas aij, ya que sus columnas son las coordenadas de los vectores T(vj) respecto de la base C de W. La matriz A se denomina “matriz asociada a T respecto al par de bases B y C”. b) Probaremos ahora que
[ ] [ ]; ( )C B
x V T x A x∀ ∈ = .
Es decir, veremos cómo la matriz A determina la transformación lineal T. Para ello:

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 14
Si Vx∈ , entonces existen y son únicos 1 2, ,..., nx x x F∈ tales que x se escribe como combinación
lineal de vectores de la base B de V, es decir
1 1 2 21
...n
n n j jj
x x v x v x v x v=
= + + + = ∑
por lo que el vector de coordenadas del vector x respecto a la base B viene dado por
[ ]1
2 B
n
x
xx
x
=
⋮
Calculamos T(x)
� �
(1) (2)1 1 1 1 1 1
(3) 1 1 1 1 1 1
( ) ( ) ( )
( ) ( ) = ( )
n n n m n m
j j j j j ij i j ij ij j j i j i
n m m n m n
j ij i j ij i j ij ij i i j i j
F FF
T x T x v x T v x a w x a w
x a w x a w x a w
= = = = = =
= = = = = =∈ ∈
∈
= = = = =∑ ∑ ∑ ∑ ∑ ∑
= =∑ ∑ ∑ ∑ ∑ ∑����
luego el vector de coordenadas de T(x) respecto de la base C de W es
[ ] [ ]
11 11
2 21 1
1 1
1
2( ) ( )
nn
j jj j jj
n
j j j jj j
n n
j mj mj jj j
i a xx a
nx a i a x
T x T xc c
x a a xi m
==
= =
= =
← = ∑∑ ∑ ← = ∑ = ⇒ = ∑ ∑ ← =
⋮ ⋮
(δ)
Referencias: (1) Por propiedad de las transformaciones lineales.
(2) Por (γ).
(3) Por propiedad de las sumas finitas.
(4) Por propiedad de las sumas finitas.
Calculemos ahora [ ]
BA x
[ ]
�
11 12 1 1
21 22 2 2
1 2
1
A
n
n
m m mn n
B
nm n
a a a x
a a a xx
a a a x
××
= =
⋯
⋯
⋮ ⋮ ⋱ ⋮ ⋮
⋯������������

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 15
11
11 1 12 2 1
221 1 22 2 21
1 1 2 2
1
...
... ( )
...
n
j jj
n nn
j jn nj
nm m mn n
mj jj
a xa x a x a x
a xa x a x a x
a x a x a xa x
ε
=
=
=
∑ + + + + + + ∑ = = + + + ∑
⋮⋮
De (δ) y (ε) se sigue que [ ] [ ]; ( )
C Bx V T x A x∀ ∈ = .
Q.E.D. Nota
La matriz asociada representa a la transformación lineal en las bases B y C.
Transformación lineal asociada a una matriz Proposición
Si m nA F ×∈ (F es un cuerpo) entonces la función 1 1: n mT F F× ×→ definida por AXXT =)( es una
transformación lineal del espacio vectorial 1n
FF×
en el espacio vectorial 1m
FF×
.
Demostración Probaremos que AXXTFFT mxnx =→ )(/: 11 es una transformación lineal:
i) 1, ( ) ( ) ( )nX Y F T X Y T X T Y×∈ ⇒ + = +
(1) (2) (3)
( ) ( ) ( ) ( )T X Y A X Y AX AY T X T Y+ = + = + = +
Referencias: (1) Por definición de T. (2) Por distributividad del producto de matrices respecto a la suma de matrices (3) Por definición de T.
ii) 1 ( ) ( )na F X F T aX aT X×∈ ∧ ∈ ⇒ =
(1) (2) (3)
( ) ( ) ( ) ( )T aX A aX a AX aT X= = =
Referencias:
(1) Por definición de T. (2) Por propiedad del producto de un escalar por una matriz (3) Por definición de T.
Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 16
Luego por i) y ii) T es una transformación lineal.
Q.E.D.
Nota
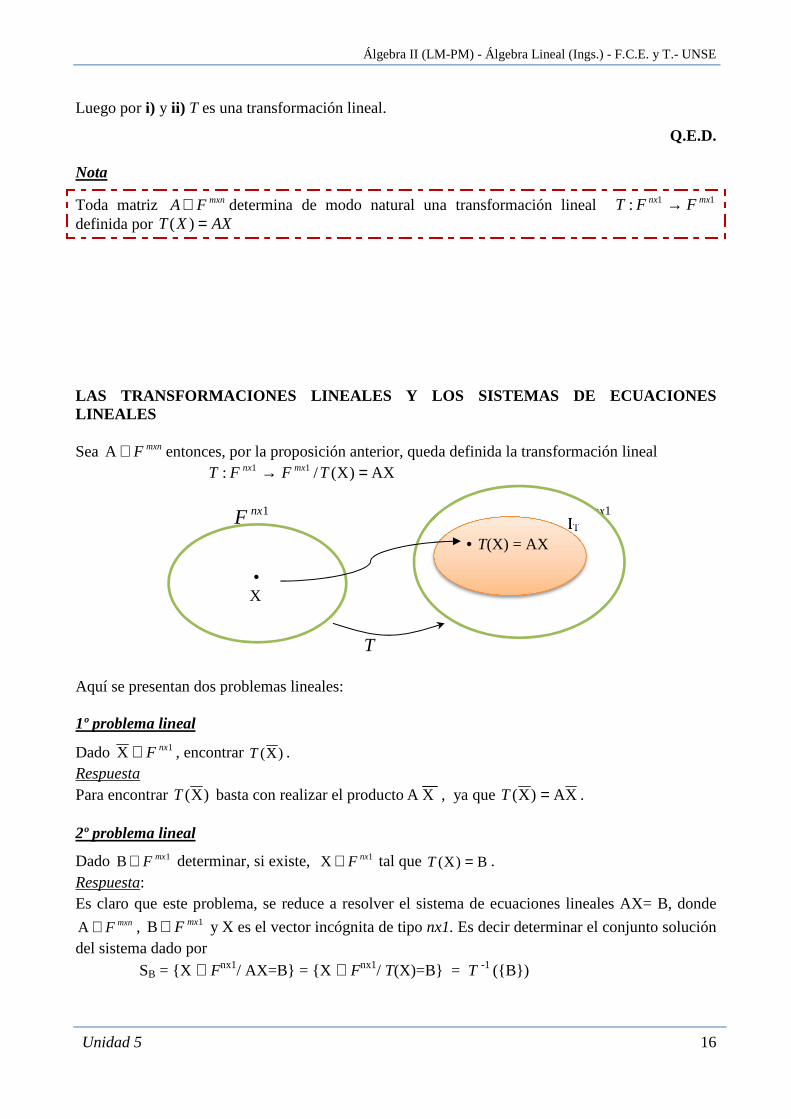
Toda matriz mxnFA∈ determina de modo natural una transformación lineal 11: mxnx FFT → definida por AXXT =)(
LAS TRANSFORMACIONES LINEALES Y LOS SISTEMAS DE ECU ACIONES LINEALES Sea mxnF∈A entonces, por la proposición anterior, queda definida la transformación lineal AX)X(/: 11 =→ TFFT mxnx
1nxF 1mxF T Aquí se presentan dos problemas lineales: 1º problema lineal
Dado 1X nxF∈ , encontrar )X(T . Respuesta Para encontrar )X(T basta con realizar el productoXA , ya que XA)X( =T . 2º problema lineal
Dado 1B mxF∈ determinar, si existe, 1X nxF∈ tal que B)X( =T . Respuesta: Es claro que este problema, se reduce a resolver el sistema de ecuaciones lineales AX= B, donde
mxnF∈A , 1B mxF∈ y X es el vector incógnita de tipo nx1. Es decir determinar el conjunto solución del sistema dado por SB = {X ∈ Fnx1/ AX=B} = {X ∈ Fnx1/ T(X)=B} = T -1 ({B})
• X
IT • T(X) = AX
Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 17
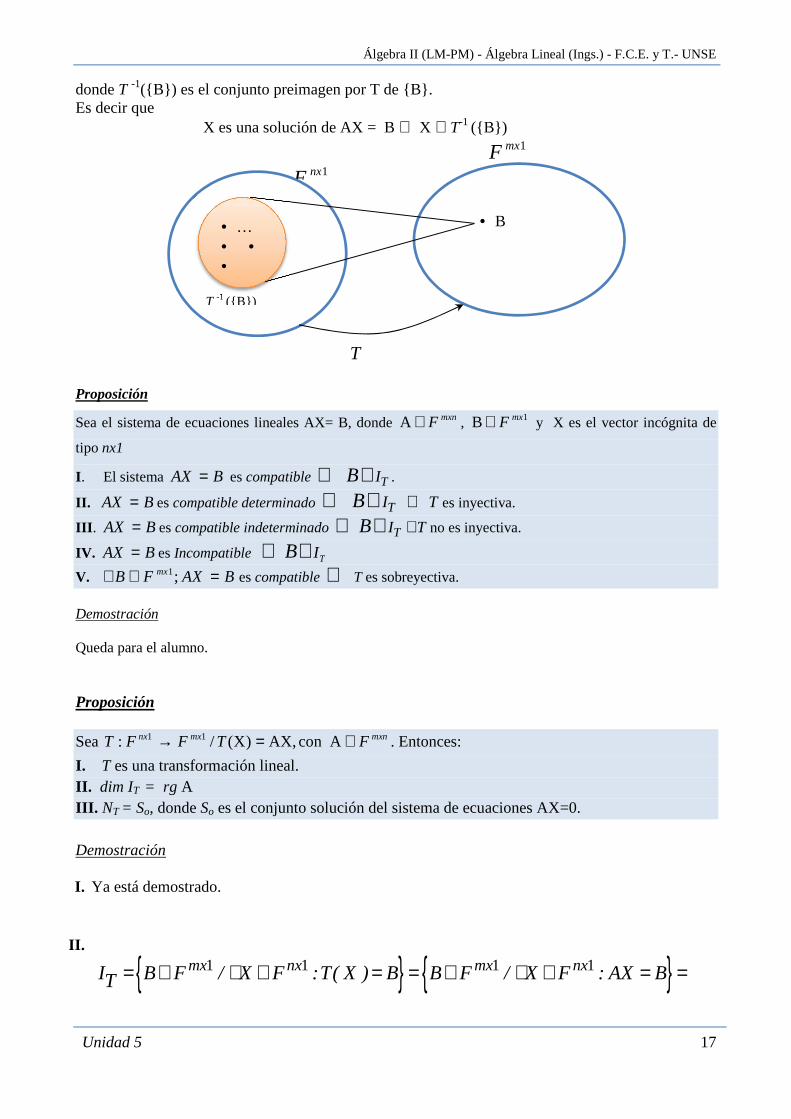
donde T -1({B}) es el conjunto preimagen por T de {B}. Es decir que X es una solución de AX = B ⇔ X ∈ T-1 ({B})
1mxF 1nxF 1nxF T Proposición
Sea el sistema de ecuaciones lineales AX= B, donde mxnF∈A , 1B mxF∈ y X es el vector incógnita de
tipo nx1
I . El sistema BAX = es compatible TIB⇔ ∈ .
II. BAX = es compatible determinado TI TB ∧⇔ ∈ es inyectiva.
III . BAX = es compatible indeterminado TI TB ∧⇔ ∈ no es inyectiva.
IV. BAX = es Incompatible TIB∉⇔
V. BAXFB mx =∈∀ ;1 es compatible ⇔ T es sobreyectiva. Demostración Queda para el alumno. Proposición Sea mxnmxnx FTFFT ∈=→ Acon ,AX)X(/: 11 . Entonces:
I. T es una transformación lineal. II. dim IT = rg A III. NT = So, donde So es el conjunto solución del sistema de ecuaciones AX=0.
Demostración I. Ya está demostrado.
II.
{ }1 1mx nxI B F / X F :T( X ) BT = ∈ ∃ ∈ = = { }1 1mx nxB F / X F : AX B∈ ∃ ∈ = =
T -1 ({B})
• B • …
• • •

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 18
==∀=+++∈∃∈=
A de columna es ;,...,1;B...:,...,,/B
2211211
jnnnmx cnjcxcxcxFxxxF
1es columna de1 2
11
nmxCn j j j
jB F / x ,x ,...,x F : x c B; j ,...,n;c A S ( A)
∑ =
= ∈ ∃ ∈ = ∀ = =
Es decir, CI S ( A)T =
donde CS ( A) es el Espacio columna de A.
Por lo tanto, )()(dimdim ArgASTI C
==
III. { } { }1 100 0nx nxN X F / T( X ) X F / AX SvT = ∈ = = ∈ = =
Donde 0v es el vector nulo del espacio vectorial Fmx1 y S0 es el conjunto solución del sistema
AX=0.
Por lo tanto,
0dimdim STN =
Recordemos: Si WVT →: es una transformación lineal y si V tiene dimensión finita n, entonces
nVINTT
==+ dimdimdim .
Por consiguiente,
)(dimdimdimdimdimdim)1(
1 ArgnNInNnFINTTT
nxTT
−=⇒−=⇒==+
Referencias:
(1) Por apartado II. Q.E.D
Teorema de Rouché-Frobenius
Sean mxnF∈A y 1B mxF∈ . El sistema de ecuaciones lineales BAX = es compatible si y sólo si, el rango de la matriz de
coeficientes A es igual al rango de la matriz ampliada [ ] ( )1m naA A| B F × += ∈ .
En símbolos: BAX = es compatible )A((A) argrg =⇔ . Demostración:
BAX = es compatible ⇔=∈∃⇔∅≠⇔ BXA:X 1nxB FS 1 2
1
n
n j jj
x ,x ,...,x F : x c B=
∃ ∈ =∑

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 19
Es decir B es combinación lineal de las columnas cj de la matriz A (*) Razonamiento: Sea C el conjunto formado por los vectores columnas de la matriz A, esto es
{ }1 21
nmxC c ,c ,...,c F= ⊂ .
El subespacio generado por C es precisamente el Espacio columna de A, es decir )A(
CSC = .
Luego por (*) resulta que )(B ASC
∈ .
Sea CB el conjunto formado por los vectores columnas de la matriz ampliada Aa, es decir,
1},,...,,B
A de columnas
A de columnas
21{ mxBccc FC
a
n ⊂=������
���� .
Es claro que el conjunto CB es linealmente dependiente puesto que B es combinación lineal de los restantes vectores de CB. Además el subespacio generado por CB es precisamente el Espacio columna de Aa, esto es
)( aASCCB
= .
¿Cómo son los espacios )(ASC
y )( aASC
?
Tenemos hasta aquí que: B es combinación lineal de las columnas de A, luego
BC es linealmente dependiente y es tal que
{ }1 2 nC c ,c ,...,c= ⊂ { }1 2 nBC c ,c ,...,c ,B=
Teniendo en cuenta la Proposición 3 de Dependencia Lineal, Unidad Nº 2, se sigue que los conjunto C y CB generan el mismo subespacio, esto es
B
CC =
por lo tanto
)()( aASASCC
=
Luego continuamos la demostración en (*)
⇔ )()( aASASCC
= ⇔ rg A = rg Aa.
Q.E.D. Una consecuencia inmediata del Teorema es el siguiente Resultado Sean mxnF∈A y 1B mxF∈ .

Álgebra II (LM-PM) - Álgebra Lineal (Ings.) - F.C.E. y T.- UNSE
Unidad 5 20
El sistema de ecuaciones lineales BAX = es incompatible si y sólo si, el rango de la matriz de coeficientes A es distinto que el rango de la matriz ampliada. En símbolos
BAX = es incompatible )A((A) argrg ≠⇔ .
Corolario Sea un sistema de ecuaciones lineales AX=B con mxnF∈A , entonces i) AX=B es determinado si rg A = rg Aa = n (número de incógnitas) ii) AX=B es indeterminado si rg A = rg Aa < n (número de incógnitas) Demostración
Queda para el alumno
Top Related