Análisis de Marcha en Pacientes Con Hemiplejia Desde Un Punto de Vista Bio-robótico
294
SIP-14-BIS INSTITUTO POLITECNICO NACIONAL SECRETARlA DE INVESTIGACION Y POSGRADO ACTA DE REVISION DE TESIS En la Ciudad de Mexico siendo las 13:00 horas del dia 15 del mes de Agosto del 2011 se reunieron los miembros de la Comision Revisora de Tesis, designada por el Colegio de Profesores de Estudios de Posgrado e Investigation de CIITEC para examinar la tesis titulada: Analisis de marcha en pacientes con hemiplejia desde un punto de vista bio-robotico Presentada por el alumno: Correa Bautista Fanny Apellido paterno aspirante de: Apellido materno Nombre(s) Con registro: A 0 8 0 7 8 3 Maestria en Tecnologia Avanzada Despues de intercambiar opiniones los miembros de la Comision manifestaron APROBAR LA TESIS, en virtud de que satisface los requisites senalados por las disposiciones reglamentarias vigentes. LA COMISION REVISORA Dra. Dr. Fernand Alvarez Chavez V Dr. Gustavo Romero Martinez Dr. Sebastian/G)iaz de la Torfe PRESIDENTE DEL M. en C. Vice
-
Upload
leoncio-tafur-joaquin -
Category
Documents
-
view
69 -
download
16
Transcript of Análisis de Marcha en Pacientes Con Hemiplejia Desde Un Punto de Vista Bio-robótico

SIP-14-BIS
INSTITUTO POLITECNICO NACIONALSECRETARlA DE INVESTIGACION Y POSGRADO
ACTA DE REVISION DE TESIS
En la Ciudad de Mexico siendo las 13:00 horas del dia 15 del mes de
Agosto del 2011 se reunieron los miembros de la Comision Revisora de Tesis, designada
por el Colegio de Profesores de Estudios de Posgrado e Investigation de CIITEC
para examinar la tesis titulada:
Analisis de marcha en pacientes con hemiplejia desde un punto de vista bio-robotico
Presentada por el alumno:
Correa Bautista FannyApellido paterno
aspirante de:
Apellido materno Nombre(s)
Con registro: A 0 8 0 7 8 3
Maestria en Tecnologia Avanzada
Despues de intercambiar opiniones los miembros de la Comision manifestaron APROBAR LATESIS, en virtud de que satisface los requisites senalados por las disposiciones reglamentariasvigentes.
LA COMISION REVISORA
Dra.
Dr. Fernand Alvarez ChavezV
Dr. Gustavo Romero Martinez Dr. Sebastian/G)iaz de la Torfe
PRESIDENTE DEL
M. en C. Vice
INSTITUTO POLITÉCNICO NACIONAL
Centro de Investigación e Innovación Tecnológica
CIITEC
Tesis
“Análisis de marcha en pacientes con hemiplejia
desde un punto de vista Bio-robótico”
Que para obtener el grado de
Maestría en Tecnología Avanzada
Presenta
Ing. Fanny Correa Bautista
Directores:
Dra. Guadalupe González Díaz
Dr. Luis Iván Lugo-Villeda†
México, D.F., Septiembre 2011

Resumen
La marcha es una de las condiciones que denota la funcionalidad en las
personas y puede verse afectada por diversos factores como es el caso de las
enfermedades cerebro-vasculares y en caso particular la hemiplejia, cuyo grado de
afección dependerá del daño neurológico sufrido. De tal manera que para el
tratamiento y rehabilitación de marcha en personas con hemiplejia, es necesario
identificar y caracterizar el ciclo de marcha patológico ya que existen diversos
obstáculos en el diagnóstico y proceso de rehabilitación. Es necesario hacer un análisis
biomecánico que defina el desempeño articular y cartesiano de al menos las 4
estructuras óseas (pelvis, cadera, rodilla y tobillo) de la extremidad inferior derecha e
izquierda en los 3 planos anatómicos.
En este trabajo, se presenta una metodología para el análisis de marcha desde
un punto de vista bio-robótico, empleando una plataforma profesional de
caracterización de movimiento, sistema de videografía tridimensional del Centro de
Rehabilitación Infantil Teletón, Estado de México, con el cual se estudiaron a 8 sujetos:
3 personas que se asumen como sanas y 5 personas con diagnóstico de hemiplejia de
los cuales se obtuvieron parámetros cinemáticos y espacio-temporales. Se propone
una estrategia para la emisión de gráficas y un procedimiento de análisis, que describa
las condiciones clínicas del paciente. Se corroboran los procedimientos propuestos
para el grupo de personas en estudio. Cabe señalar que este tipo de análisis es
empleado para el diseño de una cadena cinemática útil en visualización 3D y diseño de
sistemas robóticos asistenciales. Se describen recomendaciones y perspectivas del
trabajo de investigación.


Abstract
The gait is one of the conditions that denote functionality of the human body,
which can be affected by many factors, such as diseases, and particularly, by
hemiplegy, whose level of repercussion depends upon the neurological damage
suffered. In order to provide treatment and gait rehabilitation for people with this
disease, it is necessary to identify and characterize the pathological walk cycle, and
there exist many obstacles to the diagnostic and rehabilitation process. A biomechanical
analysis of articular and Cartesian performance of at least the four bone structures
(pelvis, hip, knee and ankle) of both legs in the three anatomical planes is needed.
This work presents a methodology for gait analysis from a biomechanical
standpoint using a professional platform for characterization of the a three-dimensional
video system from the Teleton Infantile Rehabilitation Center in Estado de Mexico, with
which subjects were studied, 3 of them healthy, and 5 with a hemiplegy diagnosis, for
whom the kinematic spatial and temporal parameters were obtained. A strategy for the
generation of graphics and an analysis procedure that describes the patient’s clinical
condition is proposed and verified upon the study subjects. It is worth mentioning that
this type of analysis is employed for the design of a kinematic chain in which is useful
for 3D visualization and design of robotic assistant systems. Finally some
recommendations and perspectives from the research work are described.


Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Acrónimos
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
VII
LISTA DE ACRÓNIMOS
ACV – Accidente Cerebro Vascular
BLEEX - Berkeley Lower Extremity Exoskeleton
CRIT – Centro de Rehabilitación Infantil Teletón
EMG – Electromiografía
EVC – Enfermedad Vascular Cerebral
HAL - Hybrid Assistive Limb
OMS – Organización Mundial de la Salud
SNC – Sistema Nervioso Central
D-H – Denavit Hartenberg
LTC: Recta (Trocante-Cóndilo)
LPM: Recta (Peroné-Maleólo)
mTC: Pendiente de la recta LTC
mPM: Pendiente de la recta LPM
θFR: Amplitud angular de la rodilla
EA: Evaluación actual
EP: Evaluación previa
MCDP: Modelo Cinemático Directo de Posición
an - Distancia entre los ejes de las articulaciones
αn - Ángulo que, en un plano perpendicular a an, existe entre ambos ejes.
dn - Distancia entre las normales al eje de la articulación que quedan definidos por an-1 y
an.
Θn - Ángulo entre estas normales, medido en un plano perpendicular al eje.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
IX
Índice de figuras
Figura 1.1. Infarto isquémico……………………………………………………………
Figura 2.1. Regiones del cuerpo afectadas según la zona del cerebro dañada…
Figura 2.2. Tipos de sincinesias………………………………………………………
Figura 2.3. Marcha en barras paralelas………………………………………………
Figura 2.4. Modelo de exoesqueleto: a) HAL 3 y b) HAL 5…………………………
Figura 2.4. Modelo de exoesqueleto BLEEX…………………………………………
Figura 2.5. Modelo de exoesqueleto ROBOKNEE……………………………………
Figura 2.6. Modelo de LOKOMAT………………………………………………………
Figura 3.1. Planos del cuerpo humano en la posición anatómica estándar……….
Figura 3.2. Tres planos principales en el movimiento de la marcha………………
Figura 3.3. Rueda que representa el ciclo natural de la marcha……………………
Figura 3.4. Ciclo de la marcha humana normal……………………………………….
Figura 3.5. Parámetros medidos durante el ciclo de marcha humana normal…….
Figura 3.6. Cantidad relativa de tiempo empleado durante cada fase……………
Figura 3.7. Fases y sub-fases del ciclo de la marcha………………………………
Figura 3.8. Gráfica que representa la Flexo-Extensión de la Rodilla en el plano
sagital………………………………………………………………………
Figura 3.9. Diagrama de la propuesta metodológica para evaluación ……………
Figura 3.10. Ubicación de los marcadores en extremidad inferior………………….
Figura 3.11. Marcadores para detectar puntos anatómicos.………………………..
Figura 3.12. Colocación de marcadores……………………………………………….
2
26
29
30
43
44
44
45
56
58
59
60
60
62
63
64
72
80
81
81

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
X
Figura 3.13. Descripción de la plataforma para la caracterización del ciclo de
marcha…………………………………………………………………….
Figura 3.14. Recorrido a lo largo de la plataforma …………………………………
Figura 3.15. Descripción de marcadores para la caracterización de flexo-
extensión de rodilla identificadas por una cámara infrarroja en el
plano xz o plano sagital………………………………………………….
Figura 3.16. Procedimiento para el procesamiento de datos capturados…………
Figura 3.17. Diagrama de procedimiento para obtener gráficos de desempeño
articular durante evaluación del ciclo de marcha................................
Figura 3.18 Ciclo de marcha en el plano coronal de la extremidad inferior
derecha……………………………………………………………………
Figura 3.19 Ciclo de marcha en el plano sagital de la extremidad inferior
derecha……………………………………………………………………
Figura 3.20 Ciclo de marcha en el plano transversal de la extremidad inferior
derecha……………………………………………………………………
Figura 3.21 Ciclo de marcha en el plano coronal de la extremidad inferior
izquierda…………………………………………………………………..
Figura 3.22 de marcha en el plano sagital de la extremidad inferior izquierda….
Figura 3.23. Ciclo de marcha en el plano transversal de la extremidad inferior
izquierda…………………………………………………………..………
Figura 3.24. Relación de la biomecánica de la pelvis para una persona sana y un
paciente……………………………………………………………………
82
82
84
85
87
89
89
90
90
91
91
96
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XI
Figura 3.25. Relación de la biomecánica de la cadera, rodilla y tobillo para una
persona sana y un paciente. …………………………………………..
Figura 4.1. Persona sana 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho). ………………………………………………….
Figura 4.2 Persona sana 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho) ………………………….
Figura 4.3. Persona sana 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ……………………………………………….
Figura 4.4. Persona sana 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)…………....................
Figura 4.5. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)……………………………
Figura 4.6. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………...
Figura 4.7. Persona sana 2: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo)………………………………………………….
Figura 4.8. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)………………………….
Figura 4.9. Persona sana 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)…………………………………………………..
Figura 4.10. Persona sana 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………...
97
116
117
118
119
120
121
122
123
124
125
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XII
Figura 4.11. Persona sana 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………………………
Figura 4.12. Persona sana 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)…………………………
Figura 4.13. Paciente 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)………………………………………………….
Figura 4.14. Paciente 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………..
Figura 4.15. Paciente 1: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo)………………………………………………...
Figura 4.16. Paciente 1: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)………………………….
Figura 4.17. Paciente 2: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)………………………………………………….
Figura 4.18. Paciente 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho)…………………………..
Figura 4.19. Paciente 2: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo)………………………………………..………
Figura 4.20. Paciente 2: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo)…………………………
Figura 4.21. Paciente 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho)………………………………...………………
126
127
128
129
130
131
132
133
134
135
136

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XIII
Figura 4.22. Paciente 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho). …………………………..
Figura 4.23. Paciente 3: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………..…………….…
Figura 4.24. Paciente 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo). …………………………
Figura 4.25. Paciente 4: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho). …………………………………………………
Figura 4.26. Paciente 3: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho). …………………………
Figura 4.27. Paciente 4: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………………………
Figura 4.28. Paciente 4: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo). ……………………….
Figura 4.29. Paciente 5: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado derecho). …………………………………………………
Figura 4.30. Paciente 5: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado derecho). …………………………
Figura 4.31. Paciente 5: Trayectoria articular de la pelvis durante el ciclo de
marcha (lado izquierdo). ………………………………………………
Figura 4.32. Paciente 5: Trayectoria articular de la cadera, rodilla y tobillo
durante el ciclo de marcha (lado izquierdo). …………………………
137
138
139
140
141
142
143
144
145
146
147

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XIV
Figura 4.33. Gráfica que representa la amplitud angular de la pelvis, cadera y
rodilla en el plano coronal (lado izquierdo y lado derecho)……….
Figura 4.34. Gráfica que representa la amplitud angular de la pelvis, cadera,
rodilla y tobillo en el plano sagital (lado izquierdo y lado derecho)…
Figura 4.35. Gráfica que representa la amplitud angular de la pelvis, cadera,
rodilla y tobillo en el plano transversal (lado izquierdo y lado
derecho)………………………………………………………………….
Figura 4.36 Cadencia experimentada en 8 sujetos de estudio durante el ciclo de
marcha…………………………………………………………………….
Figura 4.37 Longitud de paso experimentada en 8 sujetos de estudio durante el
ciclo de marcha (en ambas extremidades)……………………………
Figura 4.38. Longitud de zancada experimentada en 8 sujetos de estudio
durante el ciclo de marcha (en ambas extremidades)………………
Figura 4.39. Ancho de paso experimentada en 8 sujetos de estudio durante el
ciclo de marcha (en ambas extremidades)…………………………….
Figura 4.40 Subfase de doble apoyo experimentada en 8 sujetos de estudio
durante el ciclo de marcha (en ambas extremidades)………………
Figura 4.41. Fase de apoyo y fase de oscilación en los 8 sujetos evaluados……
Figura 4.42. Relación la velocidad promedio y la fase de apoyo de los 8 sujetos
evaluados…………………………………………………………………
Figura 5.1. Representación de los 3 segmentos de la extremidad inferior como
eslabones: a) Muslo, b) Pierna y c) Pie…………………………………
154
157
161
165
165
166
166
167
167
168
176
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XV
Figura 5.2. Cadena cinemática propuesta para las extremidades inferiores………
Figura 5.3. Flexo-extensión de tobillo, rodilla, cadera, y aducción-abducción de
cadera para la extremidad derecha en el sujeto de estudio Sano 1…
Figura 5.4. Flexo-extensión de tobillo, rodilla, cadera, y aducción-abducción de
cadera para la extremidad izquierda en el sujeto de estudio Sano 1
Figura 5.5. Cinemática de posición del marco fijo en la pelvis al marco base del
tobillo……………………………………………………………………..
Figura 5.6 Cinemática de posición del marco fijo en la pelvis al marco de
pronación-supinación del tobillo………………………………………
Figura 5.7 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión del tobillo……………………………………………………
Figura 5.8 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la rodilla………………………………………………….
Figura 5.9 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la cadera……………………………………………………
Figura 5.10 Cinemática de posición del marco fijo en la pelvis al marco de
aducción-abducción de la cadera……………………………………..
Figura 5.11 Cinemática de posición del marco fijo en la pelvis al marco base del
tobillo………………………………………………………………………
Figura 5.12 Cinemática de posición del marco fijo en la pelvis al marco de
pronación-supinación del tobillo…………………………………………
Figura 5.13 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
177
182
182
184
186
188
190
191
192
194
196
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XVI
extensión del tobillo……………………………………………………….
Figura 5.14 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la rodilla……………………………………………………
Figura 5.15 Cinemática de posición del marco fijo en la pelvis al marco de flexo-
extensión de la cadera……………………………………………………
Figura 5.16 Cinemática de posición del marco fijo en la pelvis al marco de
aducción-abducción de la cadera………………………………………..
Figura E.1 Plataforma para la caracterización del ciclo de marcha………………
Figura F.1. Representación de un vector de coordenadas…………………………
Figura F.2. Cinemática Directa y Cinemática Inversa………………………………
Figura F.3. Ejemplo de Cadena Cinemática…………………………………………
Figura F.4. Longitud y torsión de un elemento de la cadena cinemática…………
Figura F.5. Distancia y ángulo entre los elementos de la cadena cinemática……
198
199
200
202
256
263
266
267
267
268
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XVII
Índice de tablas Tabla 3.1. Descripción del movimiento articular durante el ciclo de la marcha. …
Tabla 3.2. Cinemática articular normal de la marcha…………………………………
Tabla 3.3. Descripción de marcadores y nomenclatura de pares ordenados
identificados por cámara infrarroja………………………………………
Tabla 3.4: Descripción de la organización de gráficas emitidas por Matlab®………
Tabla 3.5. Proyección de ángulos articulares sobre los planos anatómicos para la
pelvis……………………………………………………………………….
Tabla 3.6. Proyección de ángulos articulares sobre los planos anatómicos para la
cadera Tabla 3.7. Proyección de ángulos articulares sobre los planos
anatómicos para la rodilla………………………………………………
Tabla 3.8. Proyección de ángulos articulares sobre los planos anatómicos para el
tobillo………………………………………………………………………
Tabla 3.10. Parámetros espacio-temporales, cinemáticos. …………………………
Tabla 4.1. Parámetros espacio-temporales de la persona sana 1…………………
Tabla 4.2. Parámetros espacio-temporales de la persona sana 2…………………
Tabla 4.3. Parámetros espacio-temporales de la persona sana 3…………………
Tabla 4.4. Parámetros espacio-temporales del paciente 1…………………………
Tabla 4.5. Parámetros espacio-temporales del paciente 2…………………………
Tabla 4.6. Parámetros espacio-temporales del paciente 3…………………………
Tabla 4.7. Parámetros espacio-temporales del paciente 4…………………………
65
70
85
88
92
93
94
94
102
116
120
124
128
132
136
140
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Índice
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XVIII
Tabla 4.8. Parámetros espacio-temporales del paciente 5…………………………
Tabla 4.9. Rango de movilidad articular de la extremidad inferior derecha en los 3
planos……………………………………………………………………………………..
Tabla 4.10. Rango de movilidad articular de la extremidad inferior izquierda en los
3 planos………………………………………………………………………………..
144
148
150

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Contenido
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XIX
Contenido
Resumen……………………………………………………………………………..……
Abstract……………………………………………………………………………..……
Lista de acrónimos…………………………………………………………………..
Índice de figuras……………………………………….…………………………….
Índice de tablas………………………………………………………………………..…
Capítulo 1. Introducción....…………………………………………………………
1.1. Antecedentes………………………………………………………………….…
1.2. Breve descripción del estado del arte…………………………………………
1.3. Planteamiento del problema……………………………………………………
1.4. Solución propuesta………………………………………………………………
1.5. Objetivos……………………………………………………………………….…
1.1.1. Objetivo general……………………………………………………………
1.1.2. Objetivos específicos……………………………………………………
1.6. Justificación………………………………………………………………………..
1.7. Contribuciones……………………………………………………………………
1.8. Organización………………………………………………………………….…..
1.9. Referencias………………………………………………………………………
Capítulo 2. Antecedentes de robótica asistencial con aplicación para el
tratamiento de pacientes con Hemiplejia. ……….…………………………
2.1. Introducción………………………………………………………………………
III
V
VII
IX
XIX
1
1
7
9
11
12
12
12
13
15
16
18
23
23
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Contenido
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XX
2.2. Hemiplejia…………………………………………………………………………
2.2.1. Conceptos y definiciones………………………………………………….
2.2.2. Etiología de la Hemiplejia…………………………………….…………..
2.2.3. Características y Evolución.……………………………………………
2.2.4. Bipedestación……………………………………………………………...
2.2.5. Rehabilitación de la marcha y técnicas de tratamiento………………
2.2.6. La hemiplejia en números: Estadísticas………………………………
2.3. Exoesqueletos y bio-robótica…………………………………………………
2.3.1. Órtesis Activas y Exoesqueletos………………………………………
2.3.2. Generaciones de Exoesqueletos………………………………………
2.4. Breve descripción del Estado del arte………….……………………………
2.5. Retos tecnológicos………………………………………………………………
2.6. Conclusiones……………………………………………………………………
2.7. Referencias………………………………………………………………………
Capítulo 3. Análisis de marcha en pacientes con hemiplejia………………
3.1. Introducción………………………………………………………………………
3.2. La marcha humana………………………………………………………….
3.2.1. Biomecánica de la marcha humana normal……………………………
3.2.2. El ciclo de marcha y sus fases…………………………………………
3.3. Cinemática de la marcha normal………………………………………………
3.3.1. Cinemática Articular………………………………………………………
3.4. Propuesta metodológica para evaluación de la marcha.……………………
24
24
25
26
30
31
34
37
38
41
41
45
47
48
53
53
54
55
58
63
63
71

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Contenido
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XXI
3.4.1. Diagrama de bloques……………………………………………………
3.4.2. Descripción del diagrama de bloques …………………………………
3.4.3. Procedimiento……………………………………………………………
A. Selección de pacientes………………………………………………
B. Caracterización de la marcha………………………………………
C. Análisis de marcha……………………………………………………
D. Cinemática de la marcha bípeda……………………………………
E. Diagnóstico………………………………………………….…………
F. Condiciones factibles de rehabilitación………………………………
3.5 Conclusiones……………………………………………………………………
3.6. Referencias……………………………………………………………………..
Capítulo 4. Resultados del análisis del proceso de marcha…………………
4.1 Introducción……………………………………………………………………
4.2 Descripción de la plataforma experimental…………………………..……
4.3 Descripción de sujetos de evaluación…………………………………..…
4.4 Caracterización del ciclo de marcha ……………………………………..…
4.5 Emisión de gráficas de desempeño ……………………………………..…
4.6 Análisis de la marcha en pelvis, cadera, rodilla y tobillo……………….…
4.7 Análisis de la marcha en parámetros espacio-temporales. ……………
4.8 Conclusiones…………………………………………………….……..…..…
Capítulo 5. Desempeño cinemático………………………….………………….
5.1 Introducción……………………………………………………………………..
72
73
76
76
78
86
99
101
102
104
105
109
109
110
111
114
115
152
161
168
173
173

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Contenido
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XXII
5.2 Procedimiento para el diseño de un robot exoesqueleto…………………
5.3 Cinemática generalizada de la marcha bípeda………………………………
5.3.1. Parámetros Denavit-Hartenberg………………………………………
5.3.2. Matrices elementales……………………………………………………
5.4 Modelo Cinemático Directo de Posición para la extremidad derecha……
5.4.1. MCDP Pelvis-Tobillo (marco ortonormal base del pie: marco
ortonormal) …………………………….………………………………..
5.4.2. MCDP Pelvis-Tobillo (pronación-supinación: marco ortonormal 1)…
5.4.3. MCDP Pelvis-Tobillo (Flexo-extensión: marco ortonormal 2)….……
5.4.4. MCDP Pelvis-Rodilla (Flexo-extensión: marco ortonormal 3)….……
5.4.5. MCDP Pelvis-Cadera (Flexo-extensión: marco ortonormal 4).………
5.4.6. MCDP Pelvis-Cadera (Adducción-Abducción: marco ortonormal 5).
5.5 Modelo Cinemático Directo de Posición para la extremidad izquierda
5.5.1. MCDP Pelvis-Tobillo (marco ortonormal base del pie: marco
ortonormal 13) ……………………………………………………………
5.5.2. MCDP Pelvis-Tobillo (pronación-supinación: marco ortonormal 12)
5.5.3. MCDP Pelvis-Tobillo (Flexo-extensión: marco ortonormal 11)………
5.5.4. MCDP Pelvis-Rodilla (Flexo-extensión: marco ortonormal 10) …….
5.5.5. MCDP Pelvis-Cadera (Flexo-extensión: marco ortonormal 9)………
5.5.6. MCDP Pelvis-Cadera (Adducción-Abducción: marco ortonormal 8)
5.6 Conclusiones ……………………………………………………………………
5.7 Referencias…………………………………………………………………….
174
176
178
179
183
183
185
187
189
190
191
193
193
195
197
198
199
201
202
204
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Contenido
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
XXIII
Capítulo 6. Conclusiones y perspectivas..………………………………………
6.1. Conclusiones…………………………………………………………………….
6.2. Perspectivas……………………………………………………………………..
Glosario…………………………………………………………………………………...
Apéndice A: Encuesta para pacientes con Hemiplejia y médicos
especialistas en el área de neurorehabilitación..………………
Apéndice B: Protocolo de Investigación para ingresar al CRIT Estado de
México………………………………………………………………..
Apéndice C: Formato de consentimiento informado para pacientes y
médicos……………………………............................................
Apéndice D: Algoritmos.….……………………………………………………….
Apéndice E: Equipo de caracterización de la marcha en el CRIT Estado de
México…………………………………………………………………
Apéndice F: Conceptos de robótica…………………………………………………
205
205
208
211
227
235
247
251
255
263
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
1
Capítulo 1 Introducción
1.1. Antecedentes
El estilo de vida, actualmente se caracteriza por una alimentación deficiente, o
excesiva, falta de actividad física y sobre todo estrés crónico. Se vive en un ambiente
agresivo que pone a prueba la regulación del organismo, dando como resultante final
una situación de desgaste físico y emocional. Se exige demasiado y en áreas diversas
como: familiar, laboral, de pareja y social [1].
Estudios recientes, indican que las personas con estrés emocional tienden a
desarrollar patologías más fácilmente. Esto, es debido a que el estrés es una respuesta
natural de emergencia del organismo. Así, el estilo de vida, condiciona ahora e incluso
determina riesgos y daños que originan enfermedades crónico-degenerativas y muertes
prematuras [2].
La Enfermedad Vascular Cerebral (EVC) se considera uno de los principales
daños ocasionados por la hipertensión arterial, la diabetes, el sedentarismo, el estrés,
el tabaquismo, el colesterol, entre otros [3]. Fisiológicamente un accidente
cerebrovascular se define como la muerte repentina de las células del cerebro, esto es,
el infarto puede ser isquémico o hemorrágico, como se muestra en la Figura 1.1, es
decir, la obstrucción o ruptura de una arteria que impide la irrigación sanguínea al
cerebro respectivamente.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
2
Figura 1.1. Infarto isquémico [3].
La Organización Mundial de la Salud (OMS) define la Enfermedad Vascular
Cerebral (EVC) como: el “síndrome clínico caracterizado por el rápido desarrollo de
síntomas y/o signos correspondientes usualmente a afección nuerológica focal, y a
veces global, que persisten más de 24 horas o conducen a la muerte, sin otra causa
aparente que un origen vascular” [4]. Los pacientes que sobreviven al infarto, enfrentan
incapacidades permanentes, como dificultades en el movimiento, el equilibrio, la
coordinación, trastornos para caminar, tragar, hablar, parálisis de un lado del cuerpo,
problemas de visión, control de esfínteres, entre otros [5].
Cabe señalar que cuando una parte del cerebro no recibe suficiente irrigación
sanguínea, se daña de forma irreversible y no puede recuperarse al 100 %, por lo cual
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
3
no existe una curación, para las hemiplejías producidas por un accidente
cerebrovascular, a las condiciones de salud iniciales. Sin embargo, gracias a la
plasticidad cerebral, adaptación que tiene el sistema nervioso para minimizar los
efectos de las lesiones estructurales y funcionales, es posible que pueda controlar los
músculos inutilizados con la parte del cerebro no dañada.
La marcha en una persona hemipléjica, que la discapacita total o parcialmente,
presenta básicamente las siguientes características que se describen en el capítulo 2.
Disminución de la velocidad de la marcha
Control defectuoso de la extremidad afectada con disminución del tiempo de
apoyo sobre la misma durante la fase de apoyo.
Aumento del tiempo de apoyo sobre la extremidad sana y del tiempo de doble
apoyo, o sub-fase bipodal.
Menor longitud del paso.
Disminución del arco de movimiento articular de la extremidad afecta (limitación
de amplitud angular).
Existe un incremento en la incidencia de enfermedades cerebro-vasculares,
tanto que hoy en día constituye la tercera causa de mortalidad, la primera causa de
invalidez o incapacidad en los adultos y la segunda de demencia. La incidencia se sitúa
en torno a los 200 nuevos casos por 100.000 habitantes y tiene prevalencia de entre
500 y 800 casos por cada 100.000 habitantes al año.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
4
Entre los pacientes que sobreviven, un 10% precisará cuidados continuos, un
40% necesitará algún tipo de ayuda, otro 40% presentará secuelas permanentes y tan
solo un 10% podrá volver a sus actividades cotidianas con normalidad. Los factores
relacionados con los hábitos y estilo de vida, dan como resultado inevitable un
incremento de accidentes cerebrovasculares en los próximos años [6].
Para el 2007 se reportaron en México, 43 000 nuevos casos de personas con
EVC, donde del total de pacientes que presentan un cuadro de EVC, un 10% tienen
una recuperación íntegra en los primeros 45 días, un 80% requieren de rehabilitación
siempre y cuando no se encuentren afectadas la comprensión y la memoria ya que se
estima que un 30% aproximadamente desarrollan demencia en los siguientes meses
[7].
Cierto es que para la rehabilitación de personas con hemiplejía entre otros daños
neurológicos, existen diversos cuidados fisioterapéuticos, de enfermería y también de
terapia ocupacional que contribuye a que los pacientes comiencen a valerse por sí
mismos. Sin embargo, la recuperación no se logra en un 100% y surge como un
instrumento poderoso para la autonomía personal y la interacción social de la persona
con alguna discapacidad la llamada “Tecnología de la Rehabilitación” o “Tecnología
Asistencial” que es la tecnología de apoyo que evita, neutraliza, compensa o mitiga las
limitaciones funcionales de las personas y de esta manera pueda acceder a su entorno
social [9]. No olvidemos que la movilidad personal es una actividad funcional para
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
5
cualquier individuo, su calidad de vida, su autonomía e independencia dependen de
tener un buen nivel de desempeño.
La medicina moderna se ha beneficiado de los avances tecnológicos para la
facilitación y profundización en el ámbito de diagnóstico y esfera terapéutica. Es
necesario dar respuestas a las demandas sociales con una perspectiva científica y
aplicar conforme a los resultados de las investigaciones científico-tecnológicas, todos
aquellos modelos que mayor beneficio aporten a los pacientes, en este caso, los
hemipléjicos, representa uno de los desórdenes neurológicos que constituye la
principal causa de discapacidad y necesita abordarse desde el punto de vista de la
rehabilitación física y ocupacional.
Es importante mencionar que los avances experimentados en robótica desde
sus inicios han permitido ampliar sus campos de aplicación a lo que hoy se conoce
como Ayuda Técnica para personas con alguna discapacidad, ya que puede dar
soporte a muy diversos problemas de disminución física, esto debido a la relación
hombre-máquina desde el punto de vista funcional, pues si se analizan las diferentes
partes de una persona y un robot se tiene: cerebro-computador; cuerpo-estructura
mecánica; músculos-motores; sentidos-sensores y sistemas de percepción. Así, ya sea
de forma global, utilizando un sistema robótico completo, o bien, disponiendo de
solamente simples mecanismos se pueden diseñar y construir sistemas de ayuda como
han sido las órtesis y prótesis como estructuras robóticas pasivas.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
6
Estas primeras aplicaciones de la robótica en el campo de la discapacidad,
datan de los años 70 con la construcción de dispositivos protésicos y ortésicos, como
herramienta de ayuda, utilizándolo como soporte externo bajo el control del propio
usuario [8].
De ahí que surge también el concepto de Robótica Asistencial que se debe
entender como el área de la Robótica aplicada que se especializa en el diseño y
desarrollo de equipos o dispositivos que interactúan directamente con al individuo para
su rehabilitación que para el caso de las personas con deficiencia en la marcha, se
debe a la pérdida de capacidad en la movilidad de sus extremidades inferiores (pierna
izquierda o derecha) [9].
Lo anterior, no es algo nuevo y el hecho de conseguir que un ser humano pueda
controlar una máquina estando dentro de una estructura robótica con solo moverse de
manera natural, es algo que llevan impulsando los expertos en robótica desde hace
tiempo y surgen los llamados exoesqueletos, mecanismos montables y antropomorfos
que responden a los movimientos del ser humano.
Exoesqueleto, es un armazón ergonómico, en el que la persona u operador se
instala y acopla la estructura a su cuerpo, y a partir de ese momento, comienza a
responder a todos los movimientos que realiza el usuario, y no solamente imita o
reproduce su recorrido o velocidad, sino también amplifica la fuerza de manera
proporcional a la que se pide de manera intuitiva. De esta manera, el control de estas
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
7
máquinas se hace tan natural que prácticamente se convierten en extensiones del
cuerpo, pudiendo realizar acciones que no sólo requieren de potencia, sino también de
precisión [10].
Para el diseño de dispositivos robóticos asistenciales, como es el caso de un
exoesqueleto, la caracterización de movimientos, la emisión de gráficas resultantes y el
análisis de la marcha a partir del desempeño articular en las diferentes estructuras
óseas permiten desde planificar los movimientos pertinentes y reproducirlos con la
aplicación de una ley de control de movimiento y fuerza simultáneos.
1.2. Breve descripción del estado del arte
Una revisión de los trabajos más recientes de neurorehabilitación con robótica
asistencial a partir de la caracterización y análisis de marcha en pacientes con
discapacidad de movimiento en miembros inferiores son descritos en la Tabla 1.1, y
que permiten garantizar las contribuciones del presente trabajo de investigación y
desarrollo.
Tabla 1.1 Breve descripción del estado del arte en marcha y neurorehabilitación.
¿Quién/Dónde? ¿Qué? ¿Cómo?
1 USA, 2008
Universidad de Arizona, Universidad Politécnica de Hong Kong, [18].
Rehabilitación a base de repeticiones T-
wrex (Therapy Wilmington Robotic
Exoskeleton)
El sistema retoma la tarea de aprendizaje y considera la plasticidad cerebral como mecanismo de recuperación.
2 Fundación Italiana
“Salvatore Maugeri”,
[19].
Dispositivo Robótico Mime (Exo) para el
brazo, de parámetros normalizados de
control de fuerza para medir los cambios
de la interacción hombre-máquina.
Medición de los cambios en la
dinámica de movimiento durante la
neurorehabilitación con ayuda de
un robot.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
8
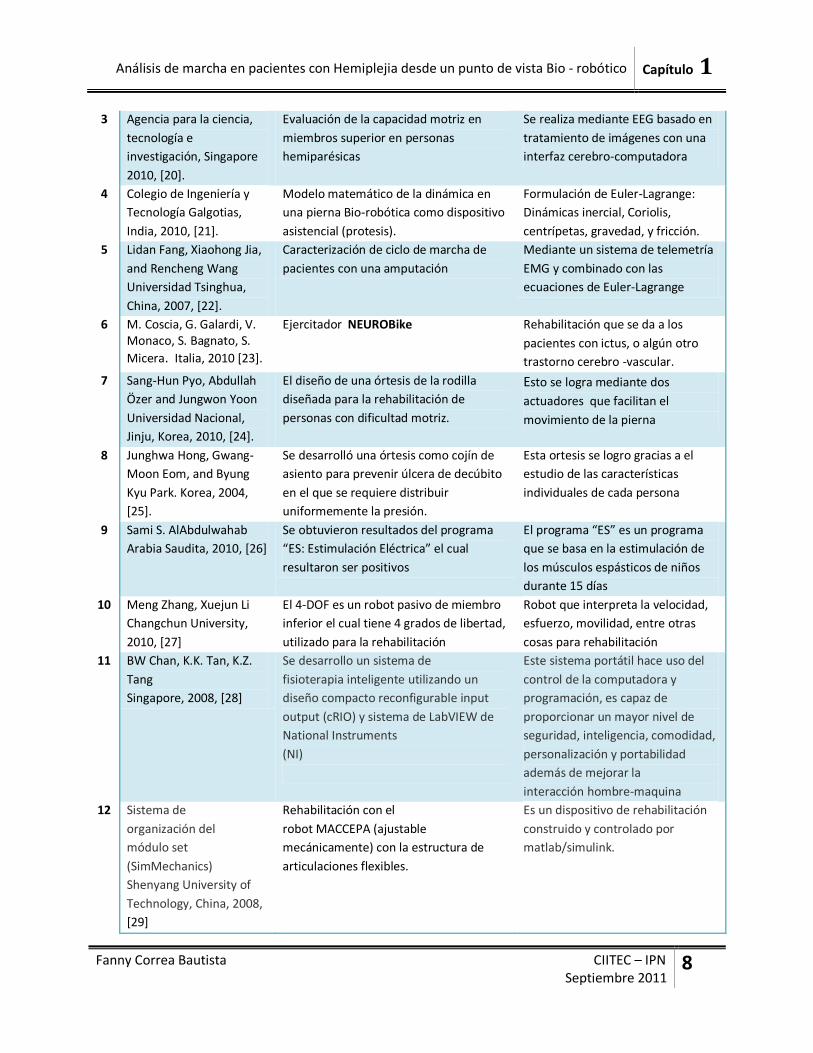
3 Agencia para la ciencia,
tecnología e
investigación, Singapore
2010, [20].
Evaluación de la capacidad motriz en
miembros superior en personas
hemiparésicas
Se realiza mediante EEG basado en
tratamiento de imágenes con una
interfaz cerebro-computadora
4 Colegio de Ingeniería y
Tecnología Galgotias,
India, 2010, [21].
Modelo matemático de la dinámica en
una pierna Bio-robótica como dispositivo
asistencial (protesis).
Formulación de Euler-Lagrange:
Dinámicas inercial, Coriolis,
centrípetas, gravedad, y fricción.
5 Lidan Fang, Xiaohong Jia,
and Rencheng Wang
Universidad Tsinghua,
China, 2007, [22].
Caracterización de ciclo de marcha de
pacientes con una amputación
Mediante un sistema de telemetría
EMG y combinado con las
ecuaciones de Euler-Lagrange
6 M. Coscia, G. Galardi, V. Monaco, S. Bagnato, S.
Micera. Italia, 2010 [23].
Ejercitador NEUROBike Rehabilitación que se da a los
pacientes con ictus, o algún otro
trastorno cerebro -vascular.
7 Sang-Hun Pyo, Abdullah
Özer and Jungwon Yoon
Universidad Nacional,
Jinju, Korea, 2010, [24].
El diseño de una órtesis de la rodilla
diseñada para la rehabilitación de
personas con dificultad motriz.
Esto se logra mediante dos
actuadores que facilitan el
movimiento de la pierna
8 Junghwa Hong, Gwang-
Moon Eom, and Byung
Kyu Park. Korea, 2004,
[25].
Se desarrolló una órtesis como cojín de
asiento para prevenir úlcera de decúbito
en el que se requiere distribuir
uniformemente la presión.
Esta ortesis se logro gracias a el
estudio de las características
individuales de cada persona
9 Sami S. AlAbdulwahab
Arabia Saudita, 2010, [26]
Se obtuvieron resultados del programa
“ES: Estimulación Eléctrica” el cual
resultaron ser positivos
El programa “ES” es un programa
que se basa en la estimulación de
los músculos espásticos de niños
durante 15 días
10 Meng Zhang, Xuejun Li
Changchun University,
2010, [27]
El 4-DOF es un robot pasivo de miembro
inferior el cual tiene 4 grados de libertad,
utilizado para la rehabilitación
Robot que interpreta la velocidad,
esfuerzo, movilidad, entre otras
cosas para rehabilitación
11 BW Chan, K.K. Tan, K.Z.
Tang
Singapore, 2008, [28]
Se desarrollo un sistema de
fisioterapia inteligente utilizando un
diseño compacto reconfigurable input
output (cRIO) y sistema de LabVIEW de
National Instruments
(NI)
Este sistema portátil hace uso del
control de la computadora y
programación, es capaz de
proporcionar un mayor nivel de
seguridad, inteligencia, comodidad,
personalización y portabilidad
además de mejorar la
interacción hombre-maquina
12 Sistema de
organización del
módulo set
(SimMechanics)
Shenyang University of
Technology, China, 2008,
[29]
Rehabilitación con el
robot MACCEPA (ajustable
mecánicamente) con la estructura de
articulaciones flexibles.
Es un dispositivo de rehabilitación
construido y controlado por
matlab/simulink.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
9
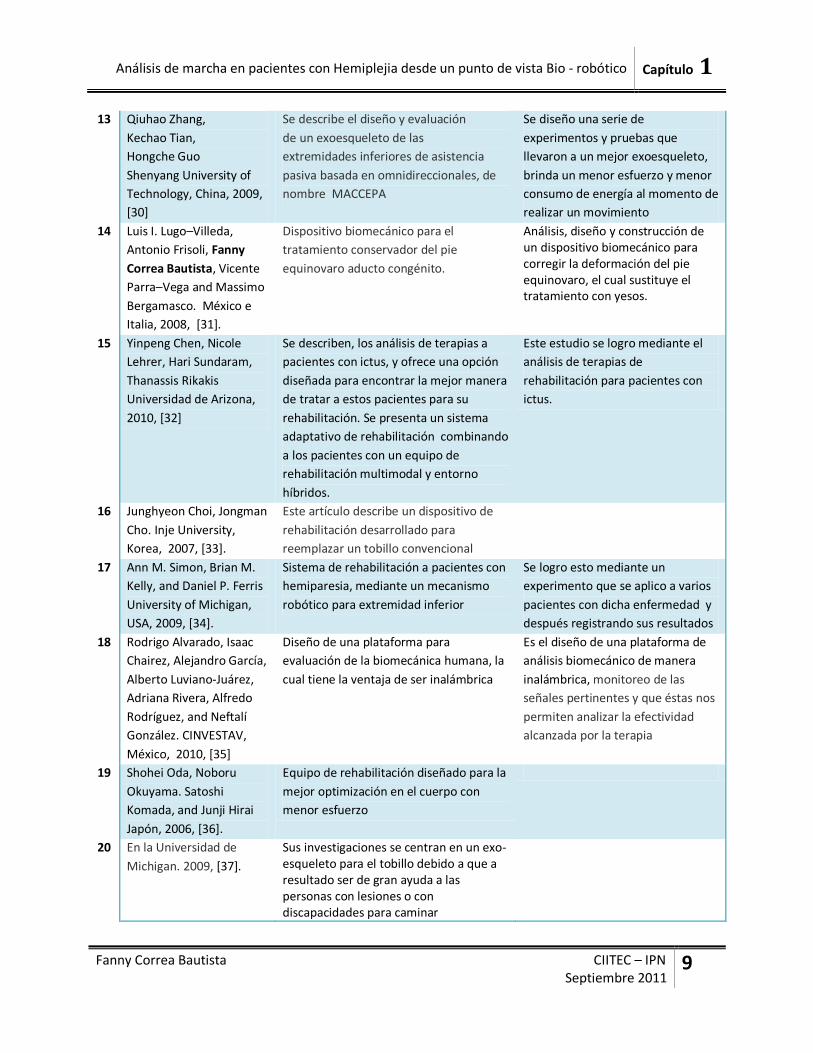
13 Qiuhao Zhang,
Kechao Tian,
Hongche Guo
Shenyang University of
Technology, China, 2009,
[30]
Se describe el diseño y evaluación
de un exoesqueleto de las
extremidades inferiores de asistencia
pasiva basada en omnidireccionales, de
nombre MACCEPA
Se diseño una serie de
experimentos y pruebas que
llevaron a un mejor exoesqueleto,
brinda un menor esfuerzo y menor
consumo de energía al momento de
realizar un movimiento
14 Luis I. Lugo–Villeda,
Antonio Frisoli, Fanny
Correa Bautista, Vicente
Parra–Vega and Massimo
Bergamasco. México e
Italia, 2008, [31].
Dispositivo biomecánico para el
tratamiento conservador del pie
equinovaro aducto congénito.
Análisis, diseño y construcción de un dispositivo biomecánico para corregir la deformación del pie equinovaro, el cual sustituye el tratamiento con yesos.
15 Yinpeng Chen, Nicole
Lehrer, Hari Sundaram,
Thanassis Rikakis
Universidad de Arizona,
2010, [32]
Se describen, los análisis de terapias a
pacientes con ictus, y ofrece una opción
diseñada para encontrar la mejor manera
de tratar a estos pacientes para su
rehabilitación. Se presenta un sistema
adaptativo de rehabilitación combinando
a los pacientes con un equipo de
rehabilitación multimodal y entorno
híbridos.
Este estudio se logro mediante el
análisis de terapias de
rehabilitación para pacientes con
ictus.
16 Junghyeon Choi, Jongman
Cho. Inje University,
Korea, 2007, [33].
Este artículo describe un dispositivo de
rehabilitación desarrollado para
reemplazar un tobillo convencional
17 Ann M. Simon, Brian M.
Kelly, and Daniel P. Ferris
University of Michigan,
USA, 2009, [34].
Sistema de rehabilitación a pacientes con
hemiparesia, mediante un mecanismo
robótico para extremidad inferior
Se logro esto mediante un
experimento que se aplico a varios
pacientes con dicha enfermedad y
después registrando sus resultados
18 Rodrigo Alvarado, Isaac
Chairez, Alejandro García,
Alberto Luviano-Juárez,
Adriana Rivera, Alfredo
Rodríguez, and Neftalí
González. CINVESTAV,
México, 2010, [35]
Diseño de una plataforma para
evaluación de la biomecánica humana, la
cual tiene la ventaja de ser inalámbrica
Es el diseño de una plataforma de
análisis biomecánico de manera
inalámbrica, monitoreo de las
señales pertinentes y que éstas nos
permiten analizar la efectividad
alcanzada por la terapia
19 Shohei Oda, Noboru
Okuyama. Satoshi
Komada, and Junji Hirai
Japón, 2006, [36].
Equipo de rehabilitación diseñado para la
mejor optimización en el cuerpo con
menor esfuerzo
20 En la Universidad de
Michigan. 2009, [37].
Sus investigaciones se centran en un exo- esqueleto para el tobillo debido a que a resultado ser de gran ayuda a las personas con lesiones o con discapacidades para caminar

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
10
1.3. Planteamiento del problema
Para el tratamiento de la persona que padece hemiplejia, uno de los grandes
retos a enfrentar es rehabilitar y corregir el proceso de su marcha. Generalmente existe
un ciclo de marcha patológico, que consiste en una mala alineación y alteración en su
tono muscular, ya sea disminuido o aumentado.
Para conocer las características de dicho patrón, es necesario realizar un
análisis de marcha que se basa en la comparación de medidas que se derivan del
análisis de la cinemática, cinética y fisiología del aparato locomotor los cuales darán
como resultado una serie de parámetros que son fundamentales para su estudio desde
el punto de vista robótico, de tal manera que la marcha patológica se pueda
caracterizar [13].
Una caracterización confiable, emisión de respuestas del desempeño articular y
cartesiano, y el análisis de marcha; no solo responden a un adecuado diagnóstico
clínico del paciente, también contribuyen en la planificación de la fisioterapia y la
terapia ocupacional, y en el diseño de sistemas robóticos asistenciales del tipo
exoesqueleto.
El problema a resolver es descrito a partir de las siguientes preguntas:
¿Las tecnologías empleadas actualmente para la caracterización de marcha,
basadas en seguimiento de flujo óptico, garantizan certidumbre con los
procedimientos tecnológicos y algoritmos computacionales empleados?
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
11
¿La automatización en la emisión de gráficas de caracterización articular y
cartesiana del ciclo de marcha contribuyen en el diagnóstico clínico?
¿El análisis de marcha de las diferentes estructuras óseas a diferentes planos
anatómicos permite una fidedigna toma de decisiones para construir la rutina de
fisioterapia y terapia ocupacional?
¿La caracterización y el análisis del ciclo de marcha facilitan el diseño de un
sistema robótico asistencial?
1.4. Solución propuesta
Para responder a las preguntas planteadas como enunciado del problema se
realizó lo siguiente:
Proponer una metodología orientada al diagnóstico y rehabilitación en miembros
inferiores de pacientes hemipléjicos, que considera la selección de pacientes, la
caracterización del ciclo de marcha, el análisis de marcha, la cinemática de
marcha bípeda, el diagnóstico (toma de decisiones médicas), y las condiciones
de rehabilitación.
La automatización por programación del proceso de emisión gráfica para la toma
de decisiones y diagnóstico clínico del paciente.
La evaluación experimental con sujetos de marcha clínicamente saludables y
patológicos para corroborar la metodología propuesta.
Un principio para el diseño de cadenas cinemáticas descritas a partir del análisis
de marcha en planos anatómicos.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
12
La obtención del modelo cinemático directo de posición para un sistema de 13
marcos ortonormales y 10 entradas articulares para describir el comportamiento
de marcha en el espacio cartesiano, útil para el diseño de sistemas
exoesqueléticos.
1.5. Objetivos
1.5.1 Objetivo general
Proponer una metodología orientada al diagnóstico y rehabilitación en miembros
inferiores de pacientes hemipléjicos, que considere la selección de pacientes, la
caracterización del ciclo de marcha, el análisis de marcha, la cinemática de marcha
bípeda, el diagnóstico (toma de decisiones médicas), y las condiciones de
rehabilitación; y que sea útil para el diseño de una cadena cinemática que permita la
base de construcción de sistemas robóticos asistenciales del tipo exoesqueleto.
1.5.2 Objetivos específicos
1. Elaborar un protocolo de investigación para accesar a instituciones del sector
salud en el área de rehabilitación física.
2. Hacer una selección de pacientes que sean candidatos para analizar el proceso
de su marcha de acuerdo a criterios de inclusión y exclusión específicos.
3. Estudio de campo para conocer clínicamente cuáles son las características de
la marcha en pacientes con hemiplejia.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
13
4. Ingresar un protocolo de investigación para el Centro de Rehabilitación Infantil
del Estado de México para la realización del análisis de marcha a pacientes
externos seleccionados según el punto anterior.
5. Realizar el análisis de marcha de acuerdo a un protocolo de estudio clínico, en
personas con marcha normal y personas hemipléjicas para establecer las
diferencias entre los respectivos patrones de marcha y obtener parámetros
espacio-temporales, cinéticos y cinemáticos.
6. Realizar el análisis biomecánico de la marcha en pacientes con hemiplejia y
personas sanas para determinar cuáles son las partes o regiones del cuerpo
que están trabajando de manera deficiente con base a los resultados obtenidos
del análisis de marcha.
7. Hacer un análisis cinemático de un ciclo de marcha patológico.
8. Hacer simulaciones numéricas cinemáticas en el espacio articular y cartesiano.
9. Proponer una cadena cinemática, útil en el diseño mecánico del exoesqueleto
de parte baja para las personas con hemiplejia.
1.6. Justificación
La EVC figura entre las primeras causas de morbilidad y mortalidad a nivel
mundial.
La hemiplejia es una secuela inhabilitante, resultado de una EVC.
Se presenta en personas que van desde los 30 años hasta personas adultas
mayores.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
14
Genera gastos médicos elevados para la familia del paciente por el cuidado de
un paciente con EVC.
Las EVC oscilan entre los 200 nuevos casos, aproximadamente, por cada
100,000 habitantes cada año y la prevalencia anual se estima entre 4,012 y
7,100 por cada 100,000 habitantes.
El 80% del total de las EVC corresponden a infarto cerebral isquémico.
El 20% restante está integrado por Hemorragia Cerebral o Subaracnoidea.
Sexta causa de muerte en general en el 2001 en México con 25731 casos.
Cuarta causa de muerte en México en el 2003
Sexta causa de muerte en el 2005 con 26 892 casos [16]
Limitados procedimientos de caracterización y análisis de marcha bípeda.
Tecnología nacional escaza a los estándares anatómicos de pacientes
mexicanos.
La rehabilitación de la marcha y las extremidades inferiores se basan
principalmente en fisioterapia y ejercicios musculares. Sin embargo, el uso de los
robots mejora los procedimientos de rehabilitación permitiendo que ésta sea de mayor
calidad así como el aumento de motivación en el paciente al sentirse más
independiente.
Sin embargo, aunque la tecnología para la rehabilitación es de gran ayuda, los
sistemas robóticos en esta área siguen siendo muy pocos. Se han abierto varias líneas
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
15
de investigación en robótica para el diagnóstico y la rehabilitación de la marcha, pero
pocas han tenido éxito y ninguna es portable, lo cual limita mucho la aplicación real en
los pacientes.
1.7. Contribuciones
Las contribuciones de éste trabajo de tesis para adquirir el grado académico de
Maestría en Tecnología Avanzada son:
1. Protocolo de investigación para las instituciones de salud en el área de
rehabilitación física involucradas en este trabajo de investigación (IMSS y CRIT,
Estado de México).
2. Análisis de marcha realizado a personas con patrones de marcha normal y
patológico respectivamente.
3. Obtención de parámetros espacio-temporales de cada persona seleccionada.
4. Análisis de datos espacio-temporales y obtención de gráficas características de
la marcha patológica y sana respectivamente.
5. Desarrollo del modelo cinemático con base en previo análisis biomecánico como
aplicación de la robótica en el ámbito de la salud.
6. Desarrollo de una metodología que integra procedimientos para lograr eficaz
diagnóstico y rehabilitación de pacientes con hemiplejia.
7. Desarrollo de software para la emisión automática de graficas en el espacio
articular y cartesiano, con beneficio en lograr eficacia en el diagnóstico.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
16
1.8. Organización
A continuación se describe brevemente el contenido del presente trabajo de
tesis:
En el Capítulo 2, se presentan los antecedentes de la robótica asistencial con
aplicación en el tratamiento de pacientes con hemiplejia, el propósito constituye las
bases y fundamentos médicos que dan origen a la hemiplejia y su clasificación de
acuerdo la región corporal afectada, como consecuencia de un funcionamiento anormal
en el sistema nervioso central entre otras patologías cerebrovasculares.
En el Capítulo 3, se presentan los procedimientos propuestos para lograr un
eficaz análisis de marcha en pacientes hemipléjicos, en el que se involucran
movimientos musculo-esqueléticos que son analizados respecto a 3 planos anatómicos
en los que se divide el cuerpo humano. Se hace un exhaustivo estudio de las fases y
sub-fases en las que se divide el ciclo de marcha, así como de los parámetros espacio-
temporales que servirán para describir la cinemática tridimensional de la pelvis, cadera,
rodilla y tobillo durante el ciclo de la marcha y así determinar una propuesta
metodológica como herramienta de diagnóstico útil en la detección de las alteraciones
de movimiento en la marcha, y determinar el tratamiento adecuado para su corrección.
En el Capítulo 4 se presentan los resultados experimentales del análisis de
marcha bípeda de acuerdo a la metodología propuesta, se describe la plataforma de
evaluación empleada para la caracterización del ciclo y fases de marcha en 8 sujetos
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
17
de estudio, se dan a conocer las características antropométricas y la caracterización
de marcha con base en gráficos descriptivas del factor de forma de las señales
articulares para flexo-extensión (pelvis, cadera, rodilla y tobillo), rotación (pelvis, cadera
y rodilla), progresión del pie, oblicuidad de pelvis, aducción-abducción de cadera, varo-
valgo de rodilla, parámetros espacio-temporales del ciclo y fases de caminata; todo ello
referido a los planos coronal, sagital y transversal.
En el Capítulo 5, y con el propósito de mecanismo de rehabilitación se propone,
la cadena cinemática de un dispositivo exoesquelético que motiva la asistencia en la
aducción-abducción de cadera, la pronación-supinación de pie y la flexo-extensión de
cadera, rodilla y tobillo de ambas extremidades; elementos que influyen en la
rehabilitación del resto de las articulaciones caracterizadas. De la cadena propuesta, y
a partir de los parámetros Denavit-Hartenberg y matrices elementales para
transformaciones homogéneas se calculan las ecuaciones de la cinemática directa de
posición de cada articulación, útiles en la planificación de movimiento del exoesqueleto
final empleado.
1.9. Referencias
[1]. Sandín, Bonifacio. “El estrés: un análisis basado en el papel de los factores
sociales”. Revista Internacional de Psicologìa Clínica y de la Salud. 2003, Vol. 3, Nº
1, pp. 141-157
http://www.previsl.com/es/sprensa/archivo/060126_cosumeres_frenaritmo.pdf
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
18
[2]. Vázquez, Victor M. “La salud para el hombre”. Boletín Electrónico: Tu Salud. Año 3,
num. 15, 2007. http://www.serviciosmedicos.pemex.com/salud/boletin/16.htm
[3]. Rosas, Martín, Pastelín, Gustavo. “Hipertensión Arterial en México. Guías y
recomendaciones para su detección, control y tratamiento”. Archivos de
Cardiología de México. Volumen 74, número 2. Abril-Junio 2004.
[4]. Maza, Daniel y Dondis, David. “Epidemiología de la Enfermedad Vascular
Cerebral”. Avances, número 16, volumen 5.
[5]. National Health Service. “Accidente Cerebrovascular”. (Acceso: Mayo 2010)
http://www.nhs.uk/translationspanish/Documents/Stroke_Spanish_FINAL.pdf
[6]. Balsmeda, León-Carrión, Barroso y Martín. “Epidemiología del trastorno
cerebrovascular”. Revista Española de Neuropsicología. ISSN: 1139-9872
[7]. CASTILLO Jaime. “Frecuencia con la que se presenta la enfermedad Cerebro
Vascular en adultos mayores en el Hospital General Dr. Miguel Silva de Morelia en
el periodo de Enero-Abril de 2006”. Tesis (Licenciatura en Medicina). Universidad
Michoacana de San Nicolás de Hidalgo, Facultad de Ciencias Médicas y Biológicas
“Dr. Ignacio Chávez”. 2006.
[8]. JORNADAS Tecnologías de la Rehabilitación y Autonomía Personal. (La Rioja,
2004). Pp. 13 y 14.
[9]. CASALS, Alicia. “Robótica y personas con discapacidad”. Zerbitzuan, número 37,
1999.
[10]. http://robotha.com/index.htm (Acceso: Abril 2010)
[11]. Exoesqueletos Robóticos. Construyendo el superhombre.
http://www.terra.es/tecnologia/articulo/html/tec18941.htm (Acceso: Abril 2010)
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
19
[12]. Díaz Novo, C., López Rios, N, Montoya, A. y Carvajal, H. “Evaluación preliminar
de la marcha en individuos sanos”. Universidad, Ciencia y Tecnología. Volumen
11, número 44, septiembre 2007. Pp. 135 – 140.
[13]. Brian Dellon, Yoky Matsuoka. “Prothetics, Exoskeletons and Rehabilitation”. IEEE
Robotics & Automatitation Magazine. March 2007.
[14]. Luis I. Lugo–Villeda, Antonio Frisoli, Fanny Correa Bautista, Vicente Parra–Vega
and Massimo Bergamasco; “Non–Invasive Biomechanical Device for the Club–
Foot Medical Treatment: A Robotic Rehabilitation Analysis”; Proceedings of
the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical
Robotics and Biomechatronics; ISBN: 978-1-4244-2883-0; pp: 323-328;
Scottsdale, AZ, USA, October 19-22, 2008
[15]. Instituto Nacional de Estadística, Geografía e Informática 2003.
[16]. Alvarez, María. “¿Se puede frenar el actual ritmo de vida?”. Psicología y realidad
virtual 2006.
[17]. Gutierrez, J.A. “The Metabolic Syndrome at the begining of the XXIst. Century”.
ISBN: 9788481748925. Primera Edición. EU, 2005.
[18]. Katherine M. Tsui, Holly A. Yanco, David J. Feil-Seifer, Maja J. Matari´c. “Survey
of Domain-Specific Performance Measures in Assistive Robotic Technology”.
PerMIS’08 August 19–21, 2008, Gaithersburg, MD, USA.
[19]. Roberto Colombo, Irma Sterpi, Alessandra Mazzone, Carmen Delconte, Giuseppe
Minuco, and Fabrizio Pisano. “Measuring Changes of Movement Dynamics During
Robot-Aided Neurorehabilitation of Stroke Patients”. IEEE Transactions on Neural
Systems and Rehabilitation Engineering, Vol. 18, No. 1, February 2010.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
20
[20]. Kai Keng Ang, Cuntai Guan, Karen Sui Geok Chua, Beng Ti Ang, Christopher
Kuah, Chuanchu Wang, Kok Soon Phua, Zheng Yang Chin, and Haihong Zhang.
“Clinical study of neurorehabilitation in stroke using EEG-based motor imagery
brain-computer interface with robotic feedback”. 32nd Annual International
Conference of the IEEE EMBS. Buenos Aires, Argentina, August 31 - September
4, 2010.
[21]. J. K. Rai, R. P. Tewari and Dinesh Chandra. “An Optimal Control of Bio-Robotic
Leg for Humanlike Walking”. 2010 International Conference on Industrial
Electronics, Control and Robotics.
[22]. Lidan Fang, Xiaohong Jia, and Rencheng Wang. “Musculoskeletal Model of the
Lower Extremity of Trans-tibial Amputee”. 2007 i-CREATeRehabilitation
Engineering & Assistive Technology
[23]. M. Coscia, G. Galardi, V. Monaco, S. Bagnato, S. Micera. “Evaluation of leg joint
trajectories while carrying out passive manipulation by NEUROBike”. 2010, 32nd
Annual International Conference of the IEEE EMBS Buenos Aires, Argentina
[24]. Sang-Hun Pyo, Abdullah Özer and Jungwon Yoon, “A Novel Design for Lower
Extremity Gait Rehabilitation Exoskeleton Inspired by Biomechanics”. 2010,
International Conference on Control, Automation and Systems
[25]. Junghwa Hong, Gwang-Moon Eom, and Byung Kyu Park. “Seat interface pressure
characteristics of plegia”. 2008, Singapore Therapeutic, Assistive & Rehabilitative
Technologies (START) Centre Kaki Bukit TechPark II
[26]. Sami S. AlAbdulwahab. “Electrical stimulation of hip adductors and abductors
improves gaitparameters of children with spastic diplegic cerebral palsy-Pilot
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
21
study”. 2010, Singapore Therapeutic, Assistive & Rehabilitative Technologies
(START) Centre Kaki Bukit TechPark II, Singapore
[27]. Meng Zhang, Xuejun Li. “A design of the mechanism for Lower Limbs Passive
Rehabilitation and Kinematics Analysis”. 2010, Fifth International Conference on
Frontier of Computer Science and Technology
[28]. BW Chan, K.K. Tan, and K.Z. Tang. “Development of a Computer-Controlled
Intelligent
[29]. Physiotherapy System” 2008, iCREATe '08 Proceedings of the 2nd International
Convention on Rehabilitation Engineering & Assistive Technology.
[30]. Qiuhao Zhang, Xuebin Xing, and Hongche Guo. “Control Method for Lower -limb
Rehabilitation Robot Joint Flexibility”. 2010, Computer Science and Information.
[31]. Qiuhao Zhang, Kechao Tian, and Hongche Guo. “Development of an
Instrumented and Passive Exoskeleton for the Lower Limb Rehabilitation”. 2009
International Association of Computer Science and Information Technology -
Spring Conference
[32]. Vitali Loseu, Hassan Ghasemzadeh, Sarah Ostadabbas, Nikhil Raveendranathan,
Jacques Malan, and Roozbeh Jafari. “Applications of Sensing Platforms with
Wearable Computers”. Proceedings of the 3rd International Conference on
PErvasive Technologies Related to Assistive Environments.
[33]. Yinpeng Chen, Nicole Lehrer, Hari Sundaram, and Thanassis Rikakis. “Adaptive
Mixed Reality Stroke Rehabilitation: System Architecture and Evaluation Metrics”.
2010, MMSys '10 Proceedings of the first annual ACM SIGMM conference on
Multimedia systems.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 1
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
22
[34]. Junghyeon Choi, Jongman Cho. “Development of An Automatic Ankle Stretching
Device for Lower Limb Monoplegia Patients”. 2007, Proceedings of the 29th
Annual International Conference of the IEEE
[35]. Ann M. Simon, Brian M. Kelly, and Daniel P. Ferris. “Preliminary trial of
symmetry-based resistance in individuals with post-stroke hemiparesis”. 2009,
31st Annual International Conference of the IEEE EMBS
[36]. Rodrigo Alvarado, Isaac Chairez, Alejandro García, Alberto Luviano-Juárez,
Adriana Rivera, Alfredo Rodríguez, and Neftalí González. “Technological Platform
for Biomechanical Analysis of Static and Dynamic Tests of Upper and Lower
Limbs”. 2010, 32nd Annual International Conference of the IEEE
[37]. Shohei Oda, Noboru Okuyama, Satoshi Komada, and Junji Hirai. “Study on
parameters identification of dynamic equation of human lower limb for improved
estimation of muscular tensions”. 2010, Advanced Motion Control, 2006. 9th IEEE
International Workshop on
[38]. Daniel P. Ferris and Cara L. Lewis. “Robotic Lower Limb Exoskeletons Using
Proportional Myoelectric Control”. 2009, 31st Annual International Conference of
the IEEE

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
23
Capítulo 2 Antecedentes de Robótica Asistencial
con Aplicación para el Tratamiento de Pacientes con Hemiplejia
2.1 Introducción
El propósito de éste capítulo constituye las bases y fundamentos médicos que
dan origen a la Hemiplejia y su clasificación de acuerdo la región corporal afectada,
como consecuencia de un funcionamiento anormal en el Sistema Nervioso Central
entre otras patologías cerebrovasculares. Con la finalidad de evaluar el ciclo de marcha
y como consecuencia definir una estrategia de rehabilitación, así como las tecnologías
involucradas, se presentan las condiciones de bipedestación como requerimiento físico.
Las estadísticas a nivel mundial, y en caso particular nacional, son relevantes para
justificar la importancia del desarrollo de sistemas robóticos de alta tecnología para
caracterización, diagnóstico y rehabilitación de pacientes con Hemiplejia. Para ello se
describe a la tecnología robótica asistencial a partir de dispositivos exoesqueléticos y
sistemas bio-robóticos con el propósito de diseñar e implementar órtesis activas siendo
el objeto de estudio de ésta tesis.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
24
2.2 Hemiplejia
2.2.1 Conceptos y definiciones
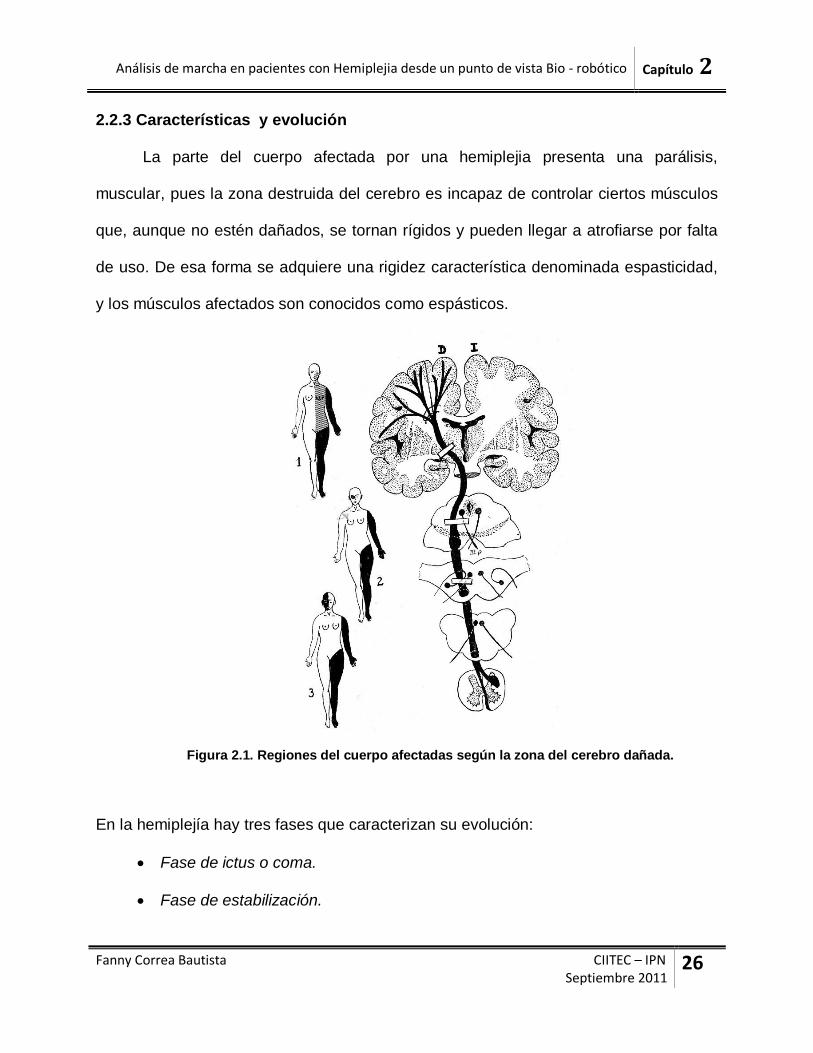
Etimológicamente la palabra hemiplejia significa “mitad de parálisis”, es decir,
parálisis de medio cuerpo [1]. La hemiplejia es definida entonces, como la parálisis que
afecta un lado del cuerpo, causada por lesiones en las vías del sistema nervioso
central. Ésta aparece bruscamente como secuela de un ataque que rompe los vasos
sanguíneos, no obstante, también los accidentes cerebrovasculares, heridas, tumores o
abscesos pueden inducir a este tipo de afecciones. Existen diferentes tipos de
hemiplejia de acuerdo a la parte del cuerpo afectada (ver Figura 2.1), o bien por la
causa que la haya provocado.
Hemiplejia capsular completa: afecta medio lado del cuerpo.
Hemiplejia cortical: afecta un lado de la cara y un brazo.
Hemiplejia peduncular alterna: afecta un brazo y una pierna (caso de estudio).
Hemiplejia protuberancial alterna: afecta a un lado de la cara, un brazo y una
pierna [2].
El Sistema Nervioso Central (SNC) es una de las dos divisiones del sistema
nervioso del cuerpo humano y está formado por el encéfalo y la médula espinal. Dicho
sistema, procesa la información desde y hacia el sistema nervioso periférico que es la
estructura principal y responsable de la coordinación y control de todo el organismo. Si
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
25
el sistema nervioso central falla, se produce una parálisis que en muchos de los casos
es irreversible.
En ocasiones, la lesión produce una disminución de la capacidad de movimiento,
sin llegar a la parálisis (hemiparesia). Una hemiplejia que se vaya desarrollando de
forma paulatina puede ser el primer síntoma de un tumor cerebral, ya que éste va
ejerciendo una presión gradual en el hemisferio cerebral en el cual se desarrolla,
impidiendo su función [3].
2.2.2 Etiología de la Hemiplejia
La palabra “Etiología” se refiere al estudio sobre las causas de las enfermedades
que afectan a los seres humanos. Una de las causas más frecuentes que produce la
hemiplejia es un accidente cerebrovascular, que interrumpe el aporte sanguíneo hacia
una región determinada del cerebro y, como consecuencia, produce muerte del tejido
cerebral correspondiente a la arteria afectada. No obstante, existen otras causas que la
producen tales como: hemorragia cerebral, trombosis arterial, embolismo arterial y
traumatismo, así como también las hemiplejias postoperatorias:
Tumores cerebrales.
Infecciones.
Intoxicaciones.
Histerismo.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
26
2.2.3 Características y evolución
La parte del cuerpo afectada por una hemiplejia presenta una parálisis,
muscular, pues la zona destruida del cerebro es incapaz de controlar ciertos músculos
que, aunque no estén dañados, se tornan rígidos y pueden llegar a atrofiarse por falta
de uso. De esa forma se adquiere una rigidez característica denominada espasticidad,
y los músculos afectados son conocidos como espásticos.
Figura 2.1. Regiones del cuerpo afectadas según la zona del cerebro dañada.
En la hemiplejía hay tres fases que caracterizan su evolución:
Fase de ictus o coma.
Fase de estabilización.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
27
Las dos fases anteriores duran entre siete y quince días por término general.
Fase de recuperación en la que el paciente va progresando hacia una relativa
mejoría en su proceso.
Desde un punto de vista práctico los estadíos de una hemiplejía son:
Estadío de ictus o coma: situación que se caracteriza por la inconsciencia total
resistente a los estímulos externos, incluso al dolor.
Estadío de hemiplejia flácida: ocurre cuando los músculos se vuelven flácidos.
Así, el brazo y la pierna del lado enfermo pierde su tono muscular, y la boca se
desvía hacia el lado sano bajo la acción de los músculos indemnes.
Estadío de hemiplejia espástica: se caracteriza por la aparición de contracturas
en el lado paralizado debido al aumento exagerado del tono muscular. La
espasticidad es de gran ayuda para la bipedestación y la marcha del individuo
[4].
En el miembro inferior las contracturas afectan a los músculos extensores y a los
flexores por lo cual el miembro permanece más o menos recto con cierto grado de
aducción lo cual podrá permitir la bipedestación y marcha.
Referente a la marcha, esta se ejecuta como marcha de segador haciendo un
movimiento de circunducción alrededor de la pierna sana.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
28
Los reflejos de automatismo medular comienzan a disminuir de intensidad y
aparecen las sincinesias que son movimientos involuntarios que acompañan a otros
voluntariamente ejecutados.
Las sincinesias pueden ser:
De imitación: el miembro enfermo imita al miembro sano predominando en la
parte distal de la extremidad, esto ocurre en miembros flácidos.
Globales: hay contracciones globales de los músculos del lado hemipléjico al
efectuar un esfuerzo con el lado sano siendo el movimiento sincinético de
flexión en el miembro superior y de extensión en el miembro inferior.
De coordinación: al efectuar una contracción voluntaria de ciertos grupos
musculares se efectúa la contracción sincinética de grupos musculares
sinérgicos de los anteriores.
Las sincinesias de cualquier tipo, se pueden utilizar en los primeros momentos
para la recuperación del hemipléjico teniendo en cuenta que a medida que se progresa
se deben ir eliminando dichas sincinesias.
En la Figura 2.2. se ilustran los tres tipos de sincinesias: imitación, global y
coordinación, respectivamente.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
29
DE IMITACIÓN
GLOBAL
DE COORDINACIÓN
Figura 2.2. Tipos de sincinesias.
No obstante, existen otras características presentes en la evolución de la
hemiplejia como son [5]:
Afasias: perturbación del lenguaje, por tanto el individuo es incapaz de expresarse por
medio de la palabra o de la escritura.
Apraxias: Se definen como la incapacidad para realizar actos motores complejos que
requieren aprendizaje previo. Estas pueden ser:
Apraxia ideatoria: el paciente no realiza actos sencillos pero si los imita.
Apraxia ideomotora: el paciente programa el movimiento pero no puede llevarlo
a cabo. Hay una intercepción entre la praxis y el área motora.
Apraxia motora: el daño reside en la corteza motora.
Alteraciones sensitivas [5]
Agnosia: son alteraciones del reconocimiento de los objetos.
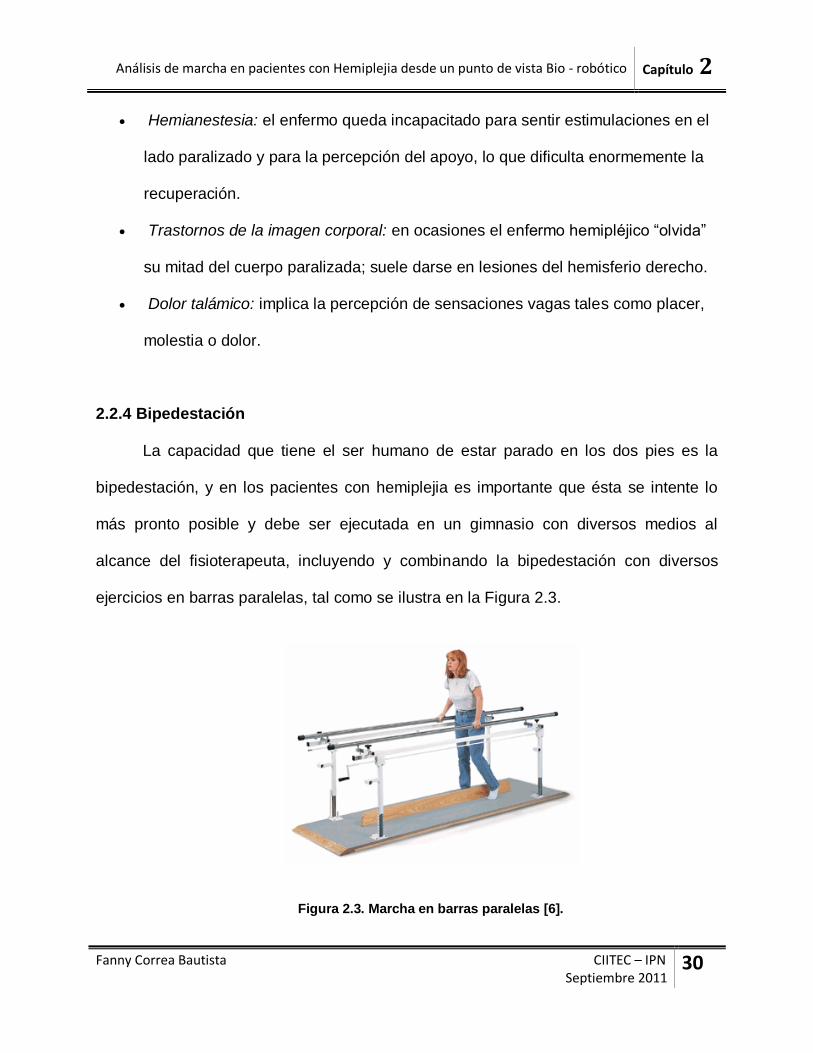
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
30
Hemianestesia: el enfermo queda incapacitado para sentir estimulaciones en el
lado paralizado y para la percepción del apoyo, lo que dificulta enormemente la
recuperación.
Trastornos de la imagen corporal: en ocasiones el enfermo hemipléjico “olvida”
su mitad del cuerpo paralizada; suele darse en lesiones del hemisferio derecho.
Dolor talámico: implica la percepción de sensaciones vagas tales como placer,
molestia o dolor.
2.2.4 Bipedestación
La capacidad que tiene el ser humano de estar parado en los dos pies es la
bipedestación, y en los pacientes con hemiplejia es importante que ésta se intente lo
más pronto posible y debe ser ejecutada en un gimnasio con diversos medios al
alcance del fisioterapeuta, incluyendo y combinando la bipedestación con diversos
ejercicios en barras paralelas, tal como se ilustra en la Figura 2.3.
Figura 2.3. Marcha en barras paralelas [6].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
31
Se recomienda que el paciente use zapatos que ayuden a la estabilidad del
tobillo. La bipedestación temprana que no solo es el primer paso hacia la marcha, tiene
su importancia por lo siguientes aspectos:
Conserva el tono muscular satisfactorio por acción refleja.
Da al paciente un mayor dominio del equilibrio.
Impide la pérdida del sentido de la posición.
Evita la posible osteoporosis del miembro inferior.
Favorece la marcha aunque la pierna esté flácida debido a los reflejos
automáticos estimulados por la posición del pie en el suelo.
Se reduce la tendencia a la espasticidad.
Una vez conseguida la bipedestación con apoyos en barras paralelas (sujetando
la mano enferma en su caso) se esperará a que el enfermo se acostumbre a la nueva
posición pasando después a la ejecución de determinados ejercicios. Existen, por
supuesto, diversos ejercicios de bipedestación, en los que cada profesional
rehabilitador físico los empleará de acuerdo a los procedimientos y técnicas clínicas
requeridas para el caso de estudio [7].
2.2.5 Rehabilitación de la marcha y técnicas de tratamiento
El trabajo de marcha se inicia una vez que el paciente ha logrado ponerse de
pie. El enfermo tratará de igualar los pasos y elevará la rodilla afectada en cada paso,
cuidando de su posterior bloqueo una vez que el pie toca el suelo.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
32
El apoyo de las manos en las paralelas se irá disminuyendo progresivamente.
No olvidar que la reeducación propia del pie irá encaminada a impedir la deformación y
a restablecer el equilibrio muscular. Esta reeducación, se debe hacer mediante
posturas, movimientos pasivos, trabajo activo y trabajo activo-asistido, evitando
principalmente la deformación del pie en equino, es decir, el talón está separado del
suelo y la persona camina sobre la punta de los dedos [8].
El trabajo de apoyo y carga del pie se efectuará con ejercicios específicos
siendo necesario en ocasiones el uso de plantillas y órtesis de pie sobre todo a fin de
evitar la caída del antepié.
Los ejercicios de marcha específicos de pie más usados son:
Marcha talonante.
Marcha sobre los bordes internos de los pies.
Marcha sobre una línea.
Marcha sobre líneas paralelas.
Marcha cruzando los pies alternativamente sobre una línea.
Existen también ejercicios generales de marcha como son:
Marcha empujando silla.
Marcha con el lado afectado junto a una pared (para evitar la marcha de
segador).
Marcha evitando obstáculos.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
33
Marcha sobre un plano inclinado ascendiendo y descendiendo; en un principio
se avanzará el pie enfermo para que el sano se ponga a su nivel pero después
se pasará a hacer marchar normal alternante.
Ascenso y descenso de escaleras.
Los aparatos de ayuda a la marcha libre, fuera de las paralelas, pueden ser:
Cuadro de marcha: el paciente mantiene el equilibrio gracias al cuadro pero
debe levantarlo para avanzar.
Esquís montados: es un caballete con unos tacos de madera alargados que se
apoyan en el suelo y proporcionan estabilidad anteroposterior pero no lateral.
Bastón auxiliar o muleta: es de poco uso en hemipléjicos.
Bastón inglés: tienen apoyo en antebrazo y mano.
Tripodes: bastón inglés terminado en tres tacos inferiores que dan un mayor
apoyo.
Bastón en T: es un bastón bajo, con apoyo de mano, poca estabilidad, y que
sólo se usa cuando el enfermo ya está muy avanzado en su trabajo de marcha.
El abuso de los bastones, cualquiera que sea su tipo, puede traer como
consecuencia alteraciones de la columna que se manifestarán con dolor, en
cuyo caso puede ser necesario hacer tonificación vertebral [3].
Toda técnica de recuperación funcional que se elija, se debe ensayar con el
paciente y poner todo a prueba dentro de la misma sesión terapéutica; esto obliga, para
obtener buenos resultados, a variar el tratamiento conforme a las respuestas del
paciente.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
34
Las técnicas dependerán de la etapa de recuperación que puede ser:
Etapa de flacidez o inicial.
Etapa de espasticidad.
Etapa de recuperación relativa.
Sin embargo, cada fisioterapeuta definirá su programa de rehabilitación de
acuerdo a la etapa de recuperación del paciente.
2.2.6 La hemiplejia en números: estadísticas
Actualmente se reconoce que la discapacidad constituye un problema
emergente de salud pública, considerando que la falta de atención adecuada y
oportuna de la misma puede favorecer desajustes sociales y problemas de
desintegración familiar, analfabetismo, desempleo, mendicidad y pérdidas económicas.
En México las personas con algún tipo de discapacidad, de la comunicación
humana, física o mental, ascienden a 10 millones de casos, que en su mayoría
carecen de los medios adecuados para acceder a escuelas o laborar en oficinas,
fábricas o dependencias gubernamentales; así como de apoyos para adquirir equipos o
aparatos para atender sus necesidades básicas.
Dentro de estas discapacidades la patología neurológica más frecuente en los
adultos que han padecido un traumatismo craneoencefálico o una enfermedad
vascular cerebral (EVC), condiciona la discapacidad en diferentes grados.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
35
Los costos económicos provocados por estas enfermedades también son
significativos. Una de las pocas estadísticas disponibles señala que para Europa
representaban en 2004 unos 139,000 millones de euros, contando solamente la
hospitalización atribuible al trauma, y sin tener en cuenta los gastos de rehabilitación ni
los días de trabajo o la productividad perdidos [9].
El Plan Nacional de Desarrollo, en sus políticas sociales, considera como
prioridad “Otorgar apoyo integral a las personas con discapacidad para su integración
a las actividades productivas y culturales, con plenos derechos y con independencia”.
Como estrategias complementarias, la OMS propone hacer hincapié en la necesidad
de proveer servicios de rehabilitación comunitarios y accesibles para los sectores de
menores recursos; y de desarrollar nuevas tecnologías y tratamientos, más eficaces.
Las enfermedades degenerativas progresan hasta que terminan con la vida de la
persona sin que exista alguna cura para detenerlas. Entre las 10 principales causas de
muerte en nuestro país destacan las enfermedades del corazón, los tumores, los
accidentes, la diabetes y la enfermedad cerebro vascular. Se trata de un vasto campo
de la salud, que incluye una gran variedad de enfermedades con una compleja historia
natural, que se están convirtiendo en el nuevo reto de la salud pública y de los servicios
de salud; y que pueden verse modificadas impactando directamente en el diagnóstico
oportuno, la prevención de la enfermedad y sus complicaciones a través de este
modelo de atención integral [10].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
36
A nivel nacional 20 millones de personas adultas mayores de 20 años padecen
alguna enfermedad crónico-degenerativa, de las cuales, más del 50 % lo desconoce y
menos del 50% recibe atención médica [11].
De acuerdo a los fundamentos previamente descritos de pacientes con
hemiplejia, las características de la discapacidad y la etapa de la enfermedad,
definidos de acuerdo a un esquema de caracterización o diagnóstico, permiten decidir
al fisioterapeuta qué procedimientos de rehabilitación y tecnologías deberán emplearse
para reducir al mínimo los efectos causados por el daño cerebral. Sin embargo, y de
acuerdo a la revisión documental fidedigna es claro apreciar las limitaciones en los
procedimientos hasta hoy evaluados en nuestro país y que sin lugar a dudas depende
de tecnologías asistenciales de bajo desempeño, es decir con limitada capacidad de
corrección de movimiento y fuerza, y que típicamente es posible resolver con sistemas
robóticos avanzados diseñados a partir de modelos matemáticos (cinemáticos y
dinámicos) representativos del cuerpo humano que describen la conducta del
movimiento (desplazamientos y velocidades) y fuerzas de interacción que permiten
diseñar las estrategias de control para lograr un adecuado acoplamiento con el ser
humano. Cabe mencionar que los trabajos de robótica con éstos propósitos han sido
orientados de manera significativa en aplicaciones industriales, militares, entrenamiento
y entretenimiento, por lo que consideran condiciones idóneas de salud en el operador,
pocas son las contribuciones efectuadas en el área médica. En la siguiente sección se
da a conocer una breve descripción de las tecnologías asistenciales y de rehabilitación
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
37
que implican el manejo de sistemas robóticos complejos, que originan la inquietud de
este trabajo de investigación.
2.3 Exoesqueletos y bio-robótica
Los humanos presentan algoritmos naturales de control complejos y
especializados que les brindan la capacidad de realizar tareas complicadas en un
amplio rango de condiciones y con tiempos de respuesta rápidos. En contraste, los
robots pueden desarrollar tareas que requieren grandes fuerzas o pares torsionales,
dependiendo de la naturaleza de su estructura y de la potencia de sus actuadores; todo
ello en función de las características dinámicas de la tarea robótica a desarrollar.
Es evidente entonces, que combinando estas dos entidades, el humano y el
robot, en un solo sistema integrado, se pueden alcanzar soluciones interesantes que se
beneficiarían de las ventajas que aporta cada subsistema. Así, la potencia mecánica
de las máquinas integrada con el sistema de control inherente al humano, llevaría a
realizar tareas que necesitan aplicar grandes fuerzas de una manera eficiente, siendo
éste el principio básico del diseño de sistemas exoesqueléticos.
Por lo tanto, el desarrollo de plataformas robóticas para aplicaciones de
rehabilitación es actualmente un foco de investigación a nivel mundial y dentro de los
principales avances se encuentran los sistemas exoesqueléticos, denominados en este
caso aplicado de bioingeniería como órtesis activas [12].

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
38
2.3.1 Órtesis activas y exoesqueletos
A lo largo de este trabajo se ha venido hablando del concepto “Exoesqueleto”,
con un enfoque que actualmente se desarrolla para minimizar las limitaciones motrices
del ser humano, es decir, órtesis, definidas por la Organización Internacional de
Estándares como un aparato usado para modificar las características funcionales o
estructurales del sistema neuronal-muscular-esquelético (musculo-esquelético), o
según el diccionario médico, Dorlands Illustrated Medical Dictionary, como un
dispositivo o aparato utilizado para soportar, alinear, prevenir, corregir deformidades o
mejorar el movimiento de alguna parte del cuerpo [13].
Una órtesis es la combinación e integración, entre las partes del cuerpo y una
pieza de ingeniería, donde el resultado de esa integración es una unidad que obedece
las leyes de la física y logra efectos o beneficios biomecánicos.
Las órtesis se pueden clasificar de modo general en dos grupos según su
principio de funcionamiento, pudiendo ser: pasivas o activas. Estas últimas se
caracterizan precisamente por ser un mecanismo estructural externo, acoplado a la
persona y cuyo mecanismo de eslabones articulados corresponde a las de la parte del
cuerpo humano que emula. Por lo tanto el contacto entre el usuario y la órtesis permite
transferir potencia mecánica y señales de información. Son sistemas mecatrónicos que
utilizan actuadores para proveer la fuerza y la movilidad de las articulaciones.
Generalmente suelen ser controlados por una unidad central de procesamiento
embebida en un sistema mínimo (microcontroladores, dispositivos FPGA´s y sistemas
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
39
DSP) o de control digital directo (estación de trabajo: computadora con tarjeta de
adquisición de datos y de control) a la que se conectan sensores y actuadores para su
funcionamiento [14].
En general, los exoesqueletos son estructuras de eslabones rígidos, montados
en el cuerpo de algún ser vivo vertebrado, siguiendo la dirección principal del
endoesqueleto de los organismos vivos (morfologías similares). Son sistemas robóticos
diseñados para trabajar junto con partes o el cuerpo humano completo, con el fin de
realizar una tarea definida específica y de manera autónoma (supeditado a las
consignas definidas por el ser humano que lo opera y la planificación de movimiento y
fuerza definidas de diseño).
Las aplicaciones principales de un sistema exoesqueleto son:
1. Amplificador de fuerza.
2. Dispositivo maestro de un sistema teleoperado maestro/esclavo (exoesqueleto).
3. Dispositivos que simulan un ambiente de realidad virtual.
La conexión física entre el exoesqueleto y el cuerpo humano refiere a varios
puntos de accesorios, usualmente al menos uno para cada extremidad, en tal condición
la estructura robótica exoesqueleto presenta dos posibles funciones simultáneas:
1. Siguiendo y localizando el movimiento corporal en términos de la configuración
espacial completa de la extremidad;
2. Siendo capaz de generar fuerzas y ejercer sobre el cuerpo humano en el punto
de contacto más bajo.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
40
Los exoesqueletos pueden ofrecer asistencia a pacientes durante la
rehabilitación del sistema locomotor guiando movimientos en trayectorias correctas, a
enseñar patrones de movimiento o dando soporte de fuerza para ser capaz de realizar
todos los movimientos [15].
Cuando consideramos la opción de introducir desarrollos para una interfaz
intuitiva hombre-máquina, es importante tomar en cuenta dos aspectos.
1º. La latencia (tiempo de propagación o retardo) entre la apariencia del deseo
de hacer un movimiento y el soporte, tiene que ser pequeño.
2º. La flexibilidad de la interface a reconocer una variedad de movimientos
necesarios a ser dados. Limitar la latencia es importante ya que implica fidelidad
en el envío de consignas de movimiento y fuerza de la estación maestra al
sistema exoesqueleto logrando con ello alto desempeño. Con una latencia alta
es imposible para el operador el control del dispositivo porque no puede
reaccionar rápidamente al movimiento resultante. La flexibilidad es importante a
lo largo del exoesqueleto para trabajar de acuerdo a la vida real.
El primer intento para desarrollar el sistema que pudiera incrementar la fuerza de
un operador humano manteniendo el control humano del manipulador fue Man-amplifier
[16]. Sin embargo han surgido contribuciones tecnológicas de relevancia en ésta área
del la robótica.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
41
2.3.2 Generaciones de exoesqueletos.
La primer generación fue el prototipo conocido como Hardyman: usaba poder
hidráulico articulado. El gran problema era el sistema servo hidromecánico
empleado en las piernas. A diferencia de los brazos, las piernas necesitan una
coordinación constante.
La segunda generación usaba un nivel dinámico de fuerzas de contacto entre el
humano y el exoesqueleto.
Una característica principal en ambas generaciones de exoesqueletos fue que el
operador podía aplicar una acción, por otro lado el exoesqueleto responde.
Algunos investigadores plantean una tercera generación de exoesqueletos
basado en la interface humano-máquina (HMI por su nombre en inglés “Human
Machine Interface”) y en la función neuromuscular humana.
2.4 Breve descripción del estado del arte
Desde hace muchas décadas, los investigadores empezaron a explorar el diseño
de órtesis activas que han evolucionado y en este apartado se revisan los
descubrimientos en este campo de investigación, dispositivos que pueden mejorar la
marcha natural de la población a diferencia de las órtesis pasivas.
. Las investigaciones en órtesis activas y exoesqueletos comenzaron a finales de
1960, casi en paralelo con una seria de grupos de investigación en Estados Unidos y
en la Ex-Yugoslavia. Por una parte se centraron fundamentalmente en el desarrollo de
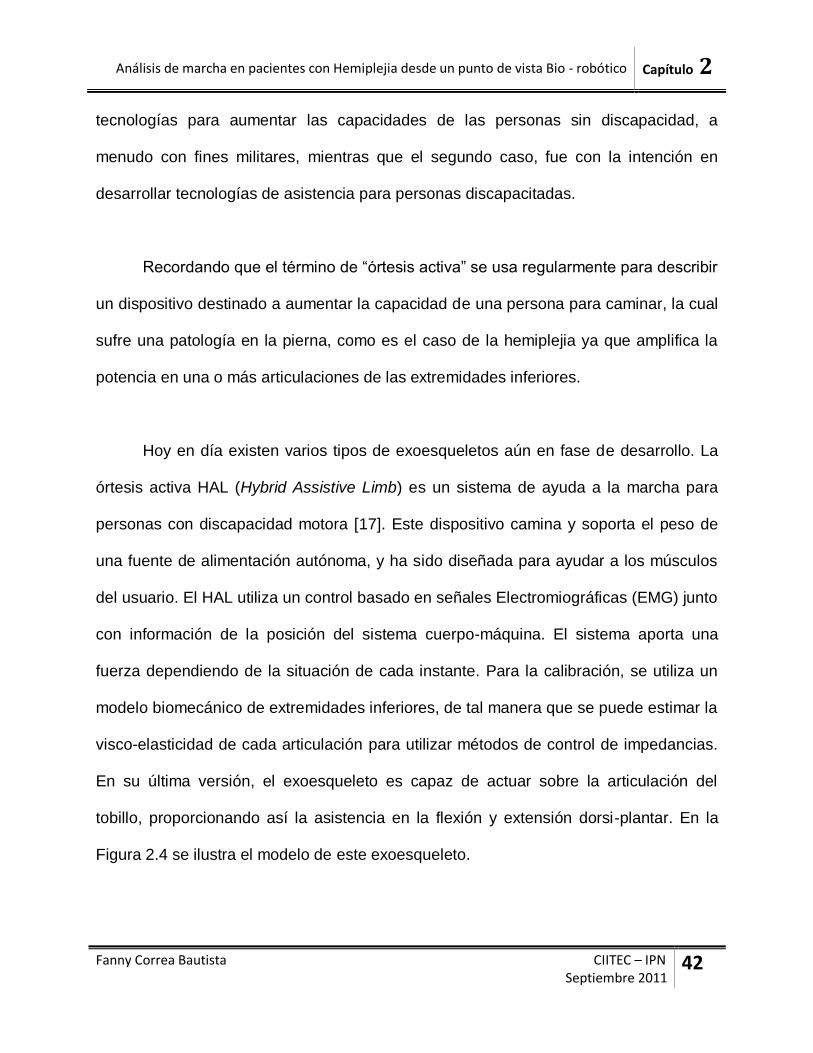
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
42
tecnologías para aumentar las capacidades de las personas sin discapacidad, a
menudo con fines militares, mientras que el segundo caso, fue con la intención en
desarrollar tecnologías de asistencia para personas discapacitadas.
Recordando que el término de “órtesis activa” se usa regularmente para describir
un dispositivo destinado a aumentar la capacidad de una persona para caminar, la cual
sufre una patología en la pierna, como es el caso de la hemiplejia ya que amplifica la
potencia en una o más articulaciones de las extremidades inferiores.
Hoy en día existen varios tipos de exoesqueletos aún en fase de desarrollo. La
órtesis activa HAL (Hybrid Assistive Limb) es un sistema de ayuda a la marcha para
personas con discapacidad motora [17]. Este dispositivo camina y soporta el peso de
una fuente de alimentación autónoma, y ha sido diseñada para ayudar a los músculos
del usuario. El HAL utiliza un control basado en señales Electromiográficas (EMG) junto
con información de la posición del sistema cuerpo-máquina. El sistema aporta una
fuerza dependiendo de la situación de cada instante. Para la calibración, se utiliza un
modelo biomecánico de extremidades inferiores, de tal manera que se puede estimar la
visco-elasticidad de cada articulación para utilizar métodos de control de impedancias.
En su última versión, el exoesqueleto es capaz de actuar sobre la articulación del
tobillo, proporcionando así la asistencia en la flexión y extensión dorsi-plantar. En la
Figura 2.4 se ilustra el modelo de este exoesqueleto.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
43
a) b)
Figura 2.4. Modelo de exoesqueleto: a) HAL 3 y b) HAL 5 [17].
BLEEX es un exoesqueleto que aumenta la capacidad motora de la persona. Es
capaz de transportar su propio peso más una carga externa de 34 kg. Dispone de una
fuente de alimentación autónoma, tiene una velocidad de desplazamiento de 1.3 m/s
con carga máxima. El sistema de control está basado en las mediciones de presión en
la plataforma de apoyo dispuesta en cada pié, por lo que no existen mediciones
directas de señales biológicas del paciente ni de las zonas de contacto entre usuario y
máquina. Dispone de 7 grados de libertad actuados mediante cilindros hidráulicos: 3 en
la cadera, 1 en la rodilla y 3 en el tobillo [18].
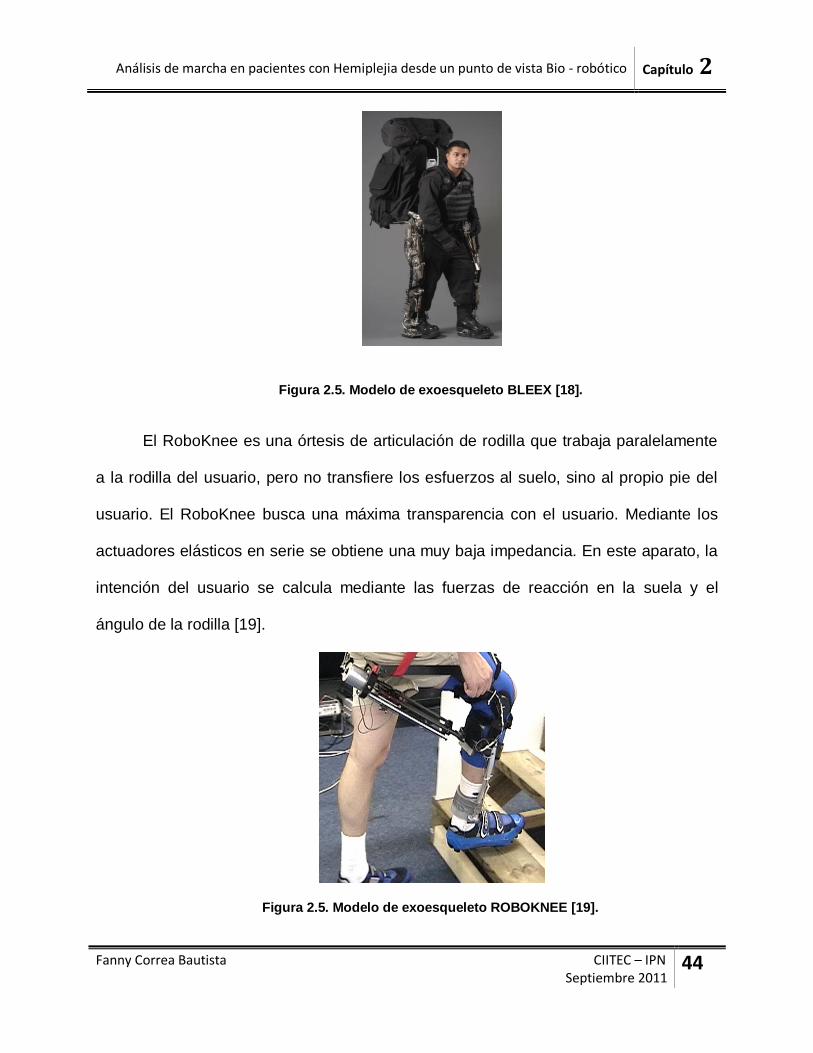
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
44
Figura 2.5. Modelo de exoesqueleto BLEEX [18].
El RoboKnee es una órtesis de articulación de rodilla que trabaja paralelamente
a la rodilla del usuario, pero no transfiere los esfuerzos al suelo, sino al propio pie del
usuario. El RoboKnee busca una máxima transparencia con el usuario. Mediante los
actuadores elásticos en serie se obtiene una muy baja impedancia. En este aparato, la
intención del usuario se calcula mediante las fuerzas de reacción en la suela y el
ángulo de la rodilla [19].
Figura 2.5. Modelo de exoesqueleto ROBOKNEE [19].
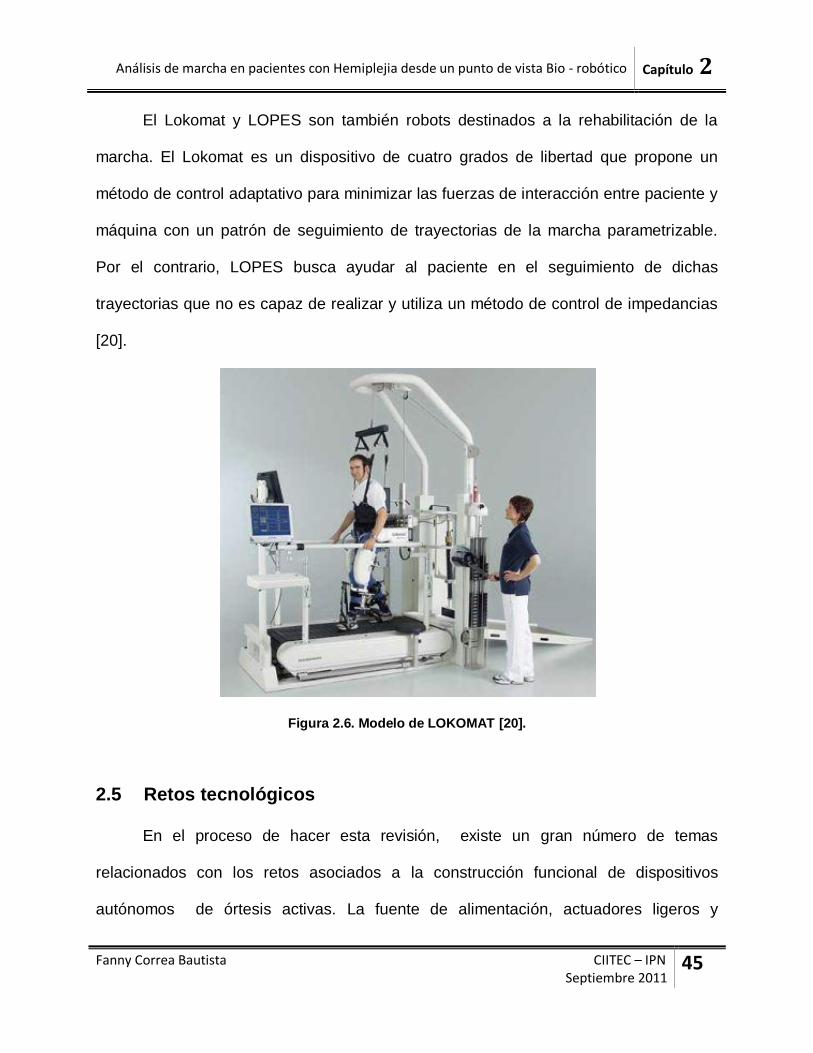
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
45
El Lokomat y LOPES son también robots destinados a la rehabilitación de la
marcha. El Lokomat es un dispositivo de cuatro grados de libertad que propone un
método de control adaptativo para minimizar las fuerzas de interacción entre paciente y
máquina con un patrón de seguimiento de trayectorias de la marcha parametrizable.
Por el contrario, LOPES busca ayudar al paciente en el seguimiento de dichas
trayectorias que no es capaz de realizar y utiliza un método de control de impedancias
[20].
Figura 2.6. Modelo de LOKOMAT [20].
2.5 Retos tecnológicos
En el proceso de hacer esta revisión, existe un gran número de temas
relacionados con los retos asociados a la construcción funcional de dispositivos
autónomos de órtesis activas. La fuente de alimentación, actuadores ligeros y
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
46
transmisión eficiente, son solo algunas de las cuestiones con las que muchos
investigadores se tienen que enfrentar.
Se ha hecho evidente, sobre todo en las etapas avanzadas de desarrollo que
para muchos, la potencia, los actuadores y otros subsistemas, no cumplen con las
características deseadas en peso, eficiencia y otros criterios necesarios para lograr los
objetivos de diseño, y es un problema también que enfrentan muchos campos de la
robótica móvil, en cuestión de arquitecturas antropomórficas. Sin embargo, el campo
de la Biomecánica ha madurado completamente en las últimas décadas
proporcionando el apoyo necesario para el diseño de dispositivos que se asemejan a la
dinámica del movimiento del cuerpo humano.
Existe una notable falta de publicación de resultados cuantitativos sobre el
rendimiento de las órtesis activas que se han desarrollado, y es cuando surge una
interrogante: ¿Cuáles son las ventajas de estos aparatos complicados y costosos?
Para estos dispositivos, se estableció una comparación con aquellos que son de
asistencia, por ejemplo, un aparato destinado para la asistencia en la caminata de una
persona que de otra manera no podría hacerlo sin ayuda. Es importante considerar el
coste metabólico de transporte, la velocidad al caminar, la suavidad y capacidad de
repetición de los movimientos, sin olvidar la fatiga muscular, la estabilidad, entre otros.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
47
Por supuesto, hay muchas cuestiones de diseño que conducen a malos
resultados que pueden ser la desalineación de articulaciones entre el operador o
usuario y el dispositivo, limitaciones en el manejo de la cinemática, la dinámica, entre
otros.
Las órtesis activas también se enfrentan a la cuestión de enormes diferencias
específicas de la discapacidad entre una persona y otra. Lo cual, hace que el desarrollo
de un dispositivo general para una determinada población exista. Hasta donde se sabe,
no existen actualmente dispositivos disponibles en el mercado que sean autónomos y
doten de asistencia activa a la persona que lo requiere. Es evidente que hay muy pocas
áreas relacionadas con el diseño mecánico de las órtesis activas que parecen ser
prometedores y han pasado por alto en gran medida.
2.6 Conclusiones
En éste capítulo se dieron a conocer los fundamentos médicos que originan la
Hemiplejia y las distintas formas de manifestación de acuerdo a la lesión
cerebrovascular, así como una descripción de su etiología, características y evolución.
Se presentaron los requerimientos para la bipedestación como una condición necesaria
para la marcha en el procedimiento de diagnóstico y rehabilitación, derivando con ello a
las técnicas de tratamiento empleadas. Por otro lado se presentaron las estadísticas
mundiales y en nuestro caso, nacionales que justifican el proponer técnicas de
caracterización, diagnóstico y rehabilitación empleando dispositivos con altas
prestaciones tecnológicas, así como la evaluación de estrategias y algoritmos de
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
48
planificación y control. La segunda sección del capítulo describe a la tecnología
robótica asistencial a partir de dispositivos exoesqueléticos y sistemas bio-robóticos
que a su vez constituyen órtesis activas siendo la razón de estudio de éste trabajo de
investigación. Adicionalmente se trataron las tres generaciones de exoesqueletos, una
breve descripción del estado del arte que describe una evolución cronológica y de
contribuciones, y finalmente los retos tecnológicos como problemas abiertos dirigidos a
la comunidad científica del área.
2.7 Referencias
[1]. Llanio, Raimundo. Propedéutica médica y Semiología. Tomo II. Editorial:
Ciencias Médicas. Cuba, 2005
[2]. Familume, Ma. Angélica. Una experiencia psicomotríz con adultos. Revista
Iberoamericana de Psicomotricidad y Técnicas Corporales. Num. 15. Agosto de
2004.
[3]. Moreno, Javier. Técnicas Fisioterapeúticas en la Hemiplejía. Universidad de
Oviedo. Noviembre 2008.
[4]. Revista Española. Salud Pública. Vol. 71, Num. 2. Madrid 1997
[5]. Fernández Gómez E, Ruiz Sancho A, Sánchez Márquez G. Tratamiento de la
Extremidad Superior en la Hemiplejia desde Terapia Ocupacional. TOG (A
Coruña). Vol 7. Número 11. Feb. 2010. ISSN 1885-527X.
[6]. Catálogo en línea: Medical Supplies and Equipment Co. Home - Rehabilitation
Equipment & Products - Parallel Bars - Crank Height Platform Bars
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
49
[7]. S. García, A.Cortés, E.Viosca, A.Escuder, C.González y M.Querol. Validación de
la clasificación funcional de la bipedestación del Hospital de Sagunto.
Rehabilitación (Madr).2010;44(1):53–59
[8]. Luis I. Lugo–Villeda, Antonio Frisoli, Fanny Correa Bautista, Vicente Parra–
Vega and Massimo Bergamasco; “Non–Invasive Biomechanical Device for
the Club–Foot Medical Treatment: A Robotic Rehabilitation Analysis”;
Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on
Biomedical Robotics and Biomechatronics; ISBN: 978-1-4244-2883-0; pp: 323-
328; Scottsdale, AZ, USA, October 19-22, 2008.
[9]. López Muñoz P., Pacheco Dacosta S, Torres Costoso A. Fisioterapia
Neurológica. "Guía de evaluación y planificación de tratamiento para pacientes
adultos con hemiplejia". Fisioterapia, Monogr 2003; 1:24-33
[10]. Organización Mundial de la Salud, 2007.
[11]. BASE DE DATOS DEL HOSPITAL “DR. MIGUEL SILVA” departamento de
estadística. México, 2003.
[12]. Becerra, J. Luis. Ingeniería en Rehabilitación y Biomecánica, una especialidad
aliada en la práctica de la Medicina. Medicina Física y Rehabilitación. Año 3,
Num. 13. 2008.
[13]. Brian Dellon and Yoky Matsuoka. Prosthetics, Exoskeletons and Rehabilitation.
IEEE Robotics and Automation Magazine. March 2007.
[14]. La revolución de las órtesis para las lesiones neurológicas. Support Concern
Worldwide. www.concern.net

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
50
[15]. Jacob Rosen Moshe Brand, Moshe B. Fuchs, and Mircea Arcan A Myosignal-
Based Powered.
[16]. Marín, Francisco. Las tecnologías de ayuda: Un modelo de intervención.
Universidad de Valencia. Valencia, 2005.
[17]. H. Kawamoto, Y. Sankai, “Comfortable Power Assist Control Method for Walking
Aid by HAL-3”, IEEE Int. Conf. On Robotics and Automation, October 2002, 6 pp
Vol 4.
[18]. H. Kazerooni, J. L. Racine, L. Huang, R. Steger, “On the Control of the Berkeley
Lower Extremity Exoskeleton (BLEEX)”, IEEE International Conference on
Robotics and Automation, April 2005.
[19]. J. E. Pratt, B. T. Krupp, C. J. Morse, S. H. Collins, „The RoboKnee: An
Exoskeleton for Enhancing Strength and Endurance During Walking“, IEEE
International Conference on Robotics and Automation, April 2004.
[20]. S. Jezernik, A. Pfister, H. Frueh, G. Colombo, M. Morar. Robotic Orthosis
Lookomat: its use in the rehabilitation of locomotion and in the development of
the biology-based neural controller“, Conference of the International.
Referencias consultadas y no citadas.
[21]. Longarzo, Maurin y Carletti. Un paso más hacia el exoesqueleto.
www.fba.unlp.edu.ar/news/SCYTEC/PDF/LONGARZO.pdf
[22]. J.M., Grosso y D.Tibaduiza. Diseño Conceptual de un Exoesqueleto para Asistir
la Rehabilitación de Miembro Inferior. IEEE. Colombia, 2009.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 2
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
51
[23]. Lünenburger, Colombo and Riener. Biofeedback for robotic gait rehabilitation.
Journal of NeuroEngineering and Rehabilitation. January, 2007.
[24]. Conor James Walsh. Biomimetic Design of an Under-Actuated Leg Exoskeleton
For Load-Carrying Augmentation. B.A.I., B.A. Mechanical and Manufacturing
Engineering (2003).
[25]. Dellon, B. Matsuoka, Y. Prosthetics, exoskeletons, and rehabilitation. IEEE
Digital Library. April 2007. ISSN: 1070-9932
[26]. Sinkka H. Peurala. “Rehabilitation of Gait in Chronic Stroke Patients”.
Departament of Neurology, University of Kuopo. Doctoral dissertation. Kuopo,
2005. ISBN: 951–781–366–X

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
53
Capítulo 3 Análisis de Marcha en
Pacientes con Hemiplejia
3.1 Introducción
El conocimiento de la locomoción humana normal es la base del tratamiento
sistemático y del manejo de la marcha patológica, especialmente cuando se usan
prótesis y órtesis. En capítulo anterior, se hizo evidente la importancia que tiene el
apoyo de la biomecánica para el diseño de dispositivos como las órtesis activas, sobre
todo en las etapas avanzadas de desarrollo. No obstante, para el tratamiento y
diagnóstico preciso de patologías en las que está involucrado el movimiento de la
marcha humana como la Hemiplejía es imprescindible hacer un análisis biomecánico.
En este capítulo se presenta una descripción de la marcha bípeda o marcha
humana en condiciones normales (no patológicas) en el que se involucran movimientos
musculo-esqueléticos que son analizados respecto a los 3 planos anatómicos en los
que se divide el cuerpo humano: plano coronal, plano sagital y plano transversal, en
cada una de las regiones articulares que conforman las extremidades inferiores del
cuerpo. Se ha de hacer un exhausto estudio de las fases y sub-fases en las que se
divide el ciclo de marcha, así como de los parámetros espacio-temporales que servirán
para describir la cinemática tridimensional de la pelvis, cadera, rodilla y tobillo durante
el ciclo de la marcha y así determinar una propuesta metodológica como herramienta

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
54
de diagnóstico para detectar las alteraciones de movimiento en la marcha y determinar
el tratamiento adecuado para su corrección.
3.2 La marcha humana
La marcha humana es un sistema de locomoción con una característica
exclusiva de la especie: el desplazamiento del peso corporal desde un punto a otro se
realiza de forma bípeda. Consta de una serie de movimientos rítmicos sucesivos y
alternantes de las extremidades inferiores, las cuales contactan con la superficie de
desplazamiento [1].
En su descripción se debe tener en cuenta, todos y cada uno de los factores que
acontecen para su consecución, tales como los requerimientos energéticos, fuerzas de
reacción del suelo y los movimientos musculo-esqueléticos ya que es el resultado de la
acción coordinada de diversos sistemas musculares.
El hombre, por su condición bípeda, utiliza principalmente el sistema muscular
relativo a la cintura pélvica y miembros inferiores; y con relación a la cintura escapular,
tronco y los miembros superiores también contribuyen a la perfección del movimiento.
Sin embargo, determinados procesos neurológicos modifican las características de la
marcha normal como consecuencia de uno de los dos aspectos relevantes siguientes
[2]:
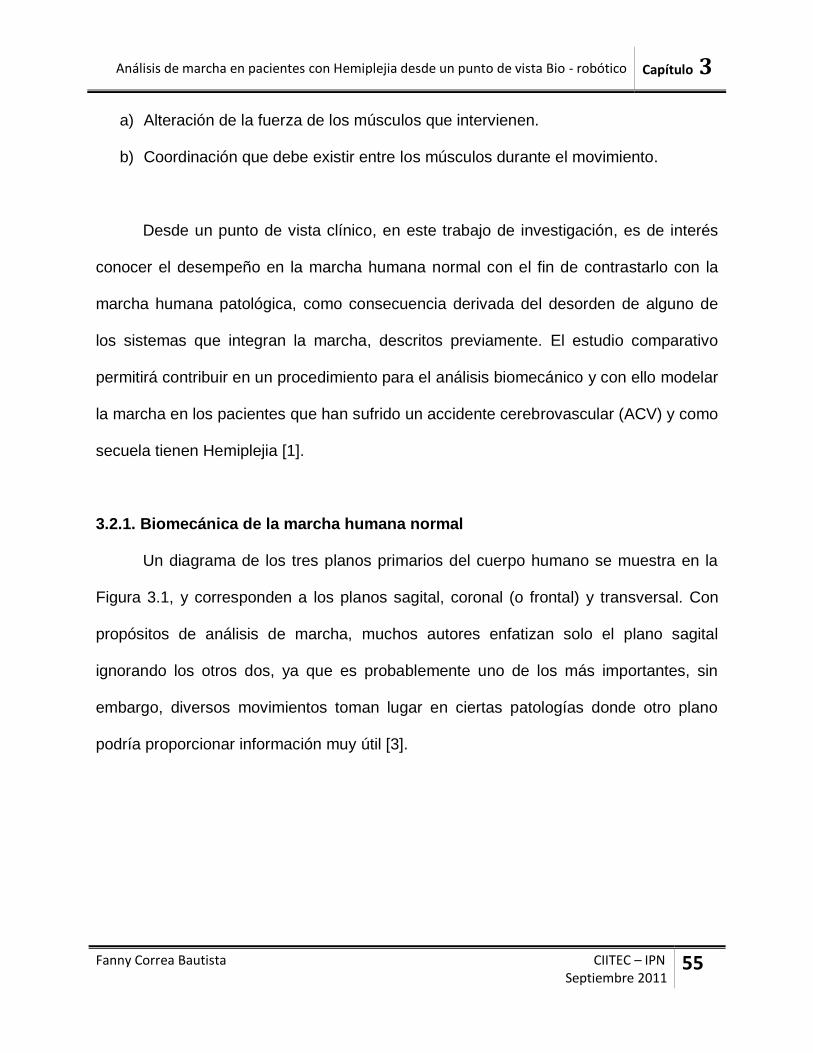
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
55
a) Alteración de la fuerza de los músculos que intervienen.
b) Coordinación que debe existir entre los músculos durante el movimiento.
Desde un punto de vista clínico, en este trabajo de investigación, es de interés
conocer el desempeño en la marcha humana normal con el fin de contrastarlo con la
marcha humana patológica, como consecuencia derivada del desorden de alguno de
los sistemas que integran la marcha, descritos previamente. El estudio comparativo
permitirá contribuir en un procedimiento para el análisis biomecánico y con ello modelar
la marcha en los pacientes que han sufrido un accidente cerebrovascular (ACV) y como
secuela tienen Hemiplejia [1].
3.2.1. Biomecánica de la marcha humana normal
Un diagrama de los tres planos primarios del cuerpo humano se muestra en la
Figura 3.1, y corresponden a los planos sagital, coronal (o frontal) y transversal. Con
propósitos de análisis de marcha, muchos autores enfatizan solo el plano sagital
ignorando los otros dos, ya que es probablemente uno de los más importantes, sin
embargo, diversos movimientos toman lugar en ciertas patologías donde otro plano
podría proporcionar información muy útil [3].
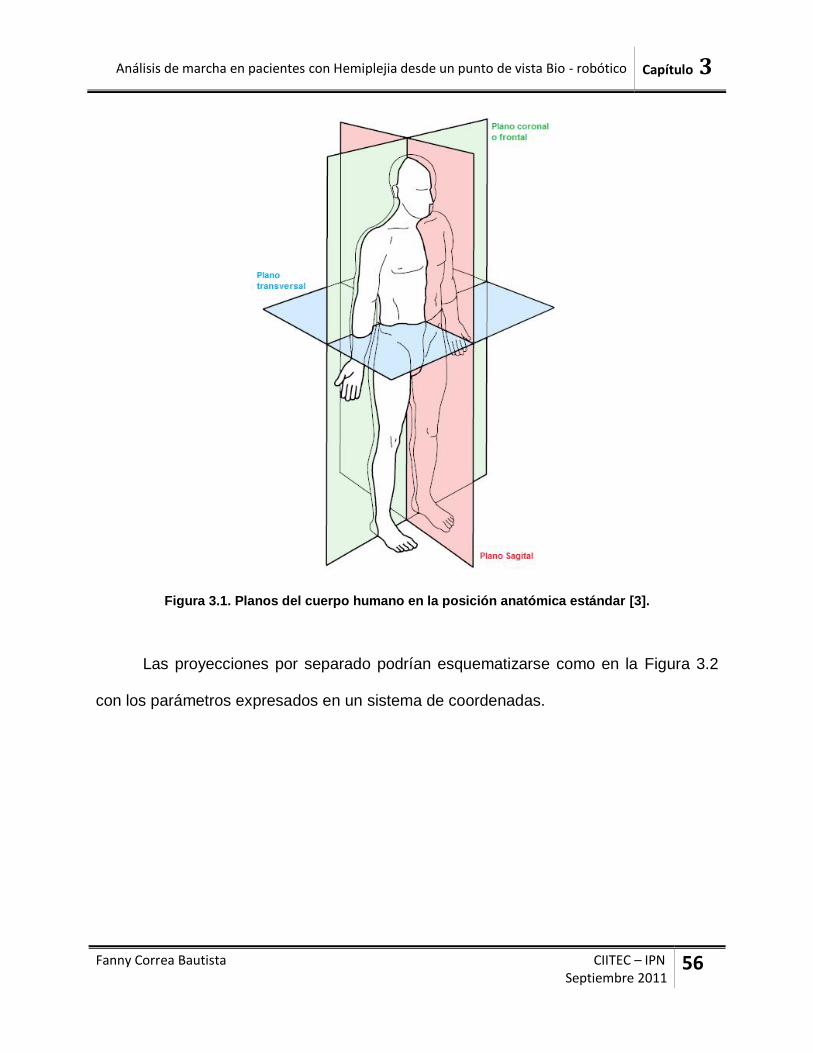
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
56
Figura 3.1. Planos del cuerpo humano en la posición anatómica estándar [3].
Las proyecciones por separado podrían esquematizarse como en la Figura 3.2
con los parámetros expresados en un sistema de coordenadas.
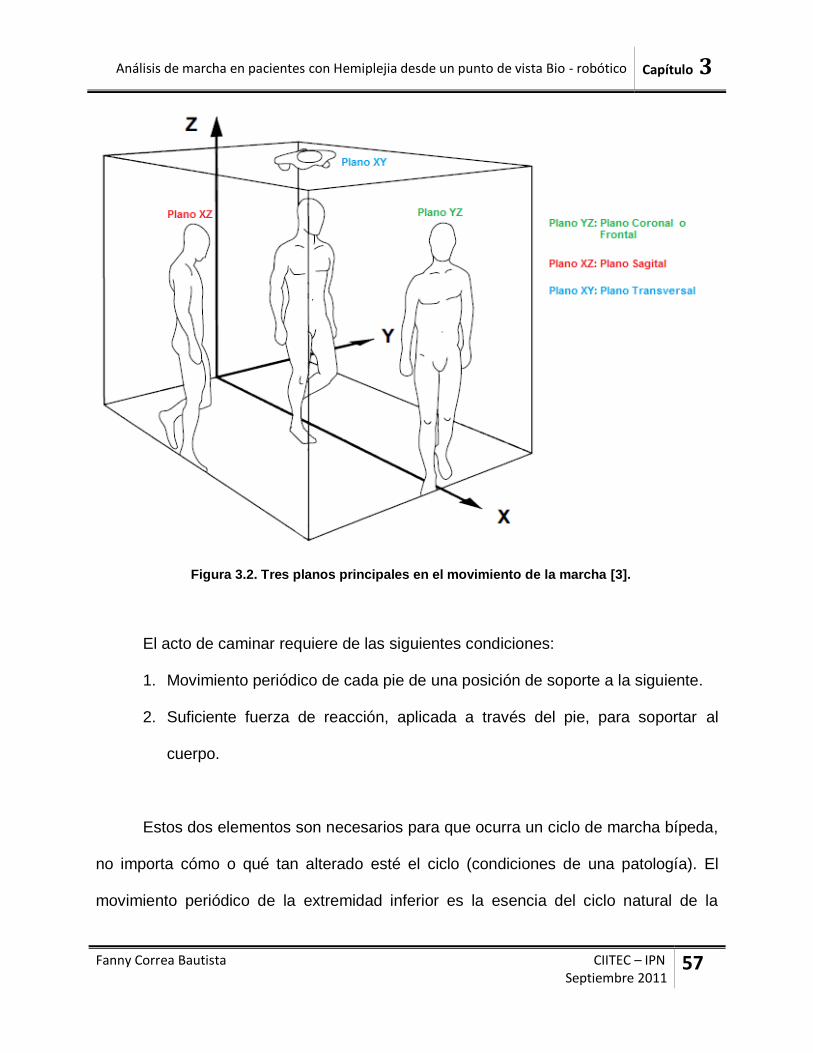
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
57
Figura 3.2. Tres planos principales en el movimiento de la marcha [3].
El acto de caminar requiere de las siguientes condiciones:
1. Movimiento periódico de cada pie de una posición de soporte a la siguiente.
2. Suficiente fuerza de reacción, aplicada a través del pie, para soportar al
cuerpo.
Estos dos elementos son necesarios para que ocurra un ciclo de marcha bípeda,
no importa cómo o qué tan alterado esté el ciclo (condiciones de una patología). El
movimiento periódico de la extremidad inferior es la esencia del ciclo natural de la

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
58
marcha humana. Se ilustra en la Figura 3.3 el movimiento de una rueda que va de
izquierda a derecha. La posición en la que primero vemos la rueda en donde el punto
inicial se indica con la línea vertical. Por convención el inicio es en 0%, cuando la rueda
comienza a girar lo hace en el sentido de las agujas del reloj, de izquierda a derecha,
en 20% la rueda ha girado 72°, así por cada 20% habrá girado 72° hasta completar el
ciclo en 100%. De manera análoga se describirá a continuación el proceso de la
marcha en la siguiente sección.
Figura 3.3. Rueda que representa el ciclo natural de la marcha [3].
3.2.2. El ciclo de marcha y sus fases
La marcha se efectúa a través de la sucesión repetida de una serie de
movimientos ejecutados fundamentalmente por las extremidades. En 1967 Lettre y
Contini describieron tres estadíos en la locomoción humana y animal: 1) fase inicial de
despegue desde el reposo, 2) estadío rítmico a velocidad constante y 3) fase de
descenso hasta el reposo. El ciclo de marcha ó zancada tiene lugar entre dos
repeticiones consecutivas de cualquier suceso de la marcha. Por conveniencia se
considera, el inicio del ciclo, el momento en que uno de los pies toma contacto con el
suelo. Cada zancada se compone de dos fases: fase de apoyo durante la cual el pie
se encuentra en contacto con el suelo y fase de oscilación en la cual el pie se halla en
el aire, al tiempo que avanza como preparación para el siguiente paso.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
59
La fase de apoyo representa el 60% del ciclo de marcha y la fase de oscilación
el 40%, a velocidad espontáneamente adoptada por el sujeto. En el momento en el que
ambos pies contactan en el suelo se llama fase de doble apoyo ó apoyo bipodal y
representa el 10% de la fase de apoyo para cada pie. En la Figura 3.4 se representa el
ciclo de la marcha, donde se indican las fases de las que se compone, así como la
subdivisión de éstas que más adelante se describirán.
Se denomina período de apoyo monopodal al intervalo durante el cual tan solo
un miembro se encuentra sobre el suelo, estando el miembro contralateral en su fase
de oscilación. Teniendo en cuenta lo previamente reflejado, el tiempo de apoyo de un
pie equivale a la suma del tiempo de apoyo monopodal de dicho pie y de los dos
tiempos de apoyo bipodal constituyendo lo que se llama tiempo de paso izquierdo y
tiempo de paso derecho, Figura 3.4.
La distancia entre dos apoyos consecutivos del mismo pie se denomina longitud
de zancada. Se denomina longitud de paso izquierdo a la distancia, medida en la
longitud de progresión, que separa el apoyo inicial del pie derecho del apoyo inicial del
pie izquierdo. Ver Figura 3.5.
De forma análoga se define la longitud de paso derecho y la suma de ambas
constituye la longitud de zancada. A la separación lateral entre los apoyos de ambos
pies, medida entre los puntos medios de los talones, se le denomina anchura del paso,
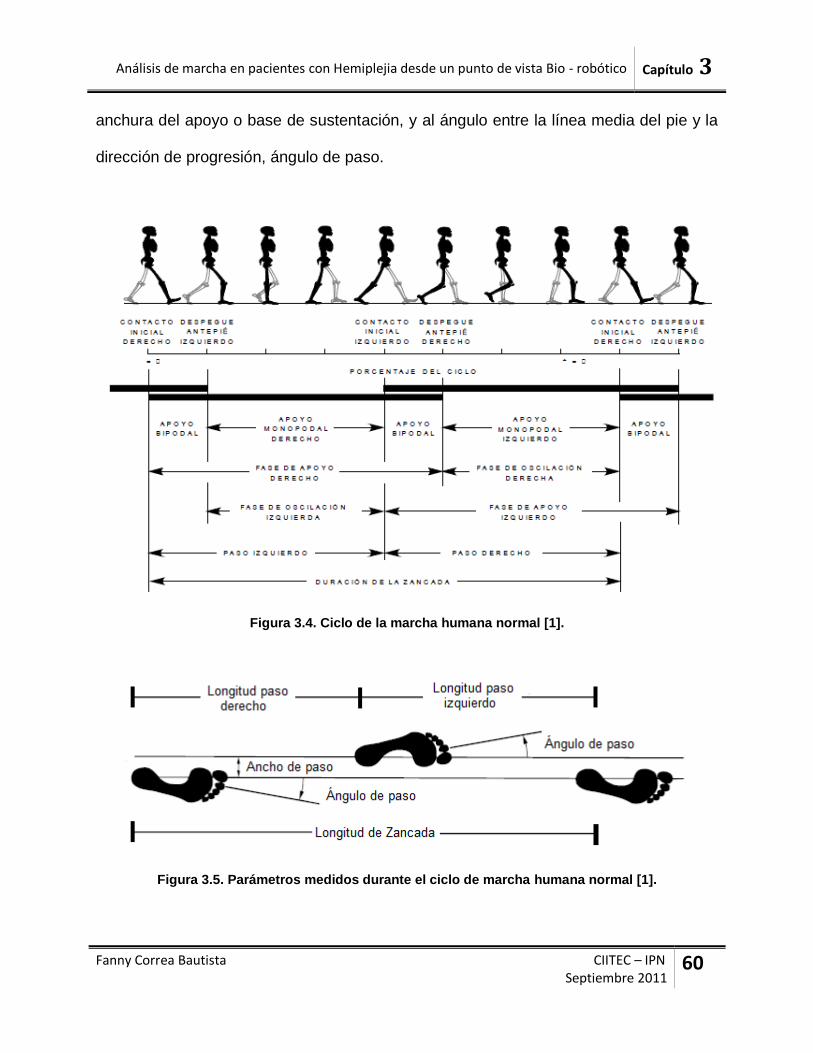
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
60
anchura del apoyo o base de sustentación, y al ángulo entre la línea media del pie y la
dirección de progresión, ángulo de paso.
Figura 3.4. Ciclo de la marcha humana normal [1].
Figura 3.5. Parámetros medidos durante el ciclo de marcha humana normal [1].
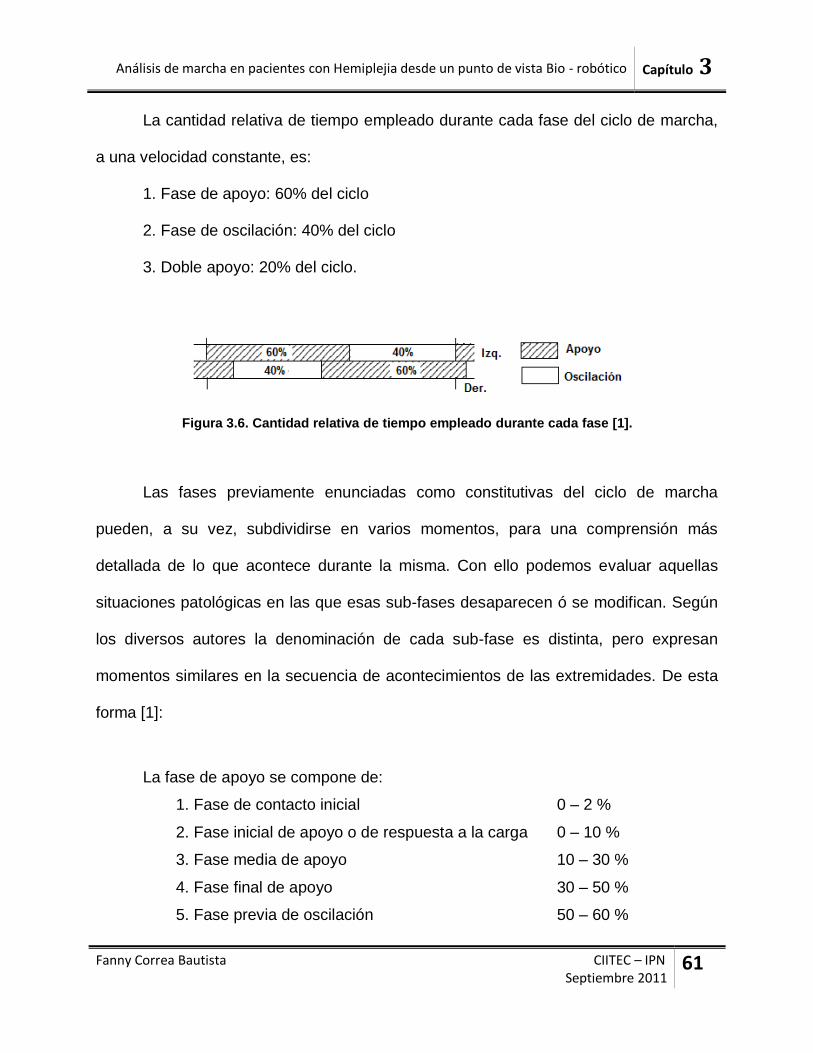
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
61
La cantidad relativa de tiempo empleado durante cada fase del ciclo de marcha,
a una velocidad constante, es:
1. Fase de apoyo: 60% del ciclo
2. Fase de oscilación: 40% del ciclo
3. Doble apoyo: 20% del ciclo.
Figura 3.6. Cantidad relativa de tiempo empleado durante cada fase [1].
Las fases previamente enunciadas como constitutivas del ciclo de marcha
pueden, a su vez, subdividirse en varios momentos, para una comprensión más
detallada de lo que acontece durante la misma. Con ello podemos evaluar aquellas
situaciones patológicas en las que esas sub-fases desaparecen ó se modifican. Según
los diversos autores la denominación de cada sub-fase es distinta, pero expresan
momentos similares en la secuencia de acontecimientos de las extremidades. De esta
forma [1]:
La fase de apoyo se compone de:
1. Fase de contacto inicial
2. Fase inicial de apoyo o de respuesta a la carga
3. Fase media de apoyo
4. Fase final de apoyo
5. Fase previa de oscilación
0 – 2 %
0 – 10 %
10 – 30 %
30 – 50 %
50 – 60 %

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
62
La fase de oscilación consta de:
6. Fase inicial de oscilación
7. Fase media de oscilación
8. Fase final de oscilación
60 - 73 %
73 - 87 %
87 - 100 %
Figura 3.7. Ciclo de marcha: Fases y subfases [3].
Las condiciones naturales para el ciclo de marcha humana en situaciones
normales (no patológicas) implican aspectos dinámicos descritos por la energía, las
fuerzas de interacción y los movimientos musculo-esqueléticos en el que su análisis
puede ser representado a partir del desempeño en los planos sagital, transversal y
coronal o frontal. Sin embargo, es relevante realizar un análisis exhaustivo a partir de
las fases y sub-fases del ciclo de marcha y que consideran las características de la
zancada (tiempo y longitud) así como la longitud y ancho de paso. Todo ello, puede ser
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
63
involucrado para el análisis del desempeño cinemático tal como se describe en la
siguiente sección.
3.3. Cinemática de la marcha normal
Una vez descrito el ciclo de la marcha, así como las fases que lo componen,
esta sección da a conocer los datos cinemáticos que se emplean como referencia para
tomar decisiones terapéuticas y evaluación de tratamiento. Aquí se describe la
cinemática tridimensional del tronco, la pelvis y las extremidades inferiores (rodilla y
tobillo). El contenido de esta sección está basado en una revisión amplia de literatura
considerada para el análisis del ciclo de marcha y la determinación de procedimientos
de evaluación en casos patológicos con múltiples citas que garantizan su validez.
3.3.1. Cinemática articular
La cinemática articular se puede representar mediante diagramas con datos
temporizados, es decir las evoluciones articulares y sus derivadas (velocidad y
aceleración angular) con relación al tiempo. Cuando se describe una marcha patológica
la temporización es tan importante como la amplitud de movimiento y no es sencillo
apreciarla solo a partir de la observación visual, para ello la medición de éste parámetro
involucra el uso de dispositivos de estado sólido como mecanismo de percepción a
base de microcontroladores (instrumentación en tiempo real). Todas las gráficas tienen
las siguientes características:
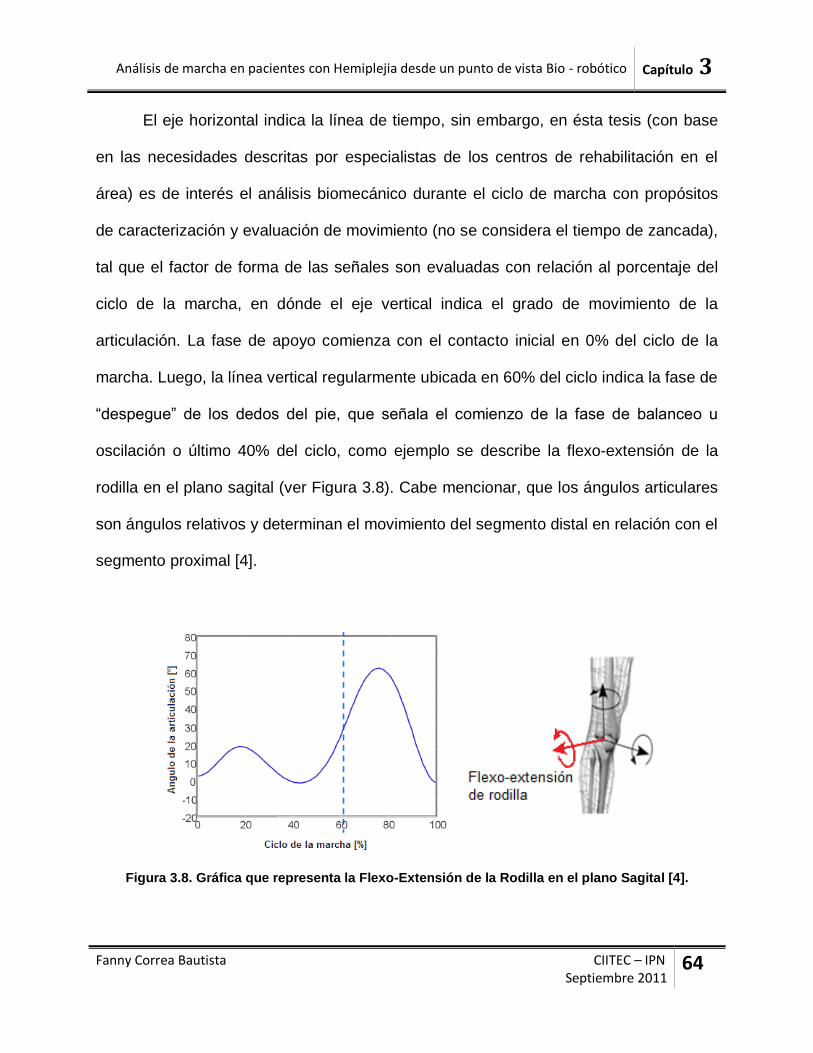
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
64
El eje horizontal indica la línea de tiempo, sin embargo, en ésta tesis (con base
en las necesidades descritas por especialistas de los centros de rehabilitación en el
área) es de interés el análisis biomecánico durante el ciclo de marcha con propósitos
de caracterización y evaluación de movimiento (no se considera el tiempo de zancada),
tal que el factor de forma de las señales son evaluadas con relación al porcentaje del
ciclo de la marcha, en dónde el eje vertical indica el grado de movimiento de la
articulación. La fase de apoyo comienza con el contacto inicial en 0% del ciclo de la
marcha. Luego, la línea vertical regularmente ubicada en 60% del ciclo indica la fase de
“despegue” de los dedos del pie, que señala el comienzo de la fase de balanceo u
oscilación o último 40% del ciclo, como ejemplo se describe la flexo-extensión de la
rodilla en el plano sagital (ver Figura 3.8). Cabe mencionar, que los ángulos articulares
son ángulos relativos y determinan el movimiento del segmento distal en relación con el
segmento proximal [4].
Figura 3.8. Gráfica que representa la Flexo-Extensión de la Rodilla en el plano Sagital [4].
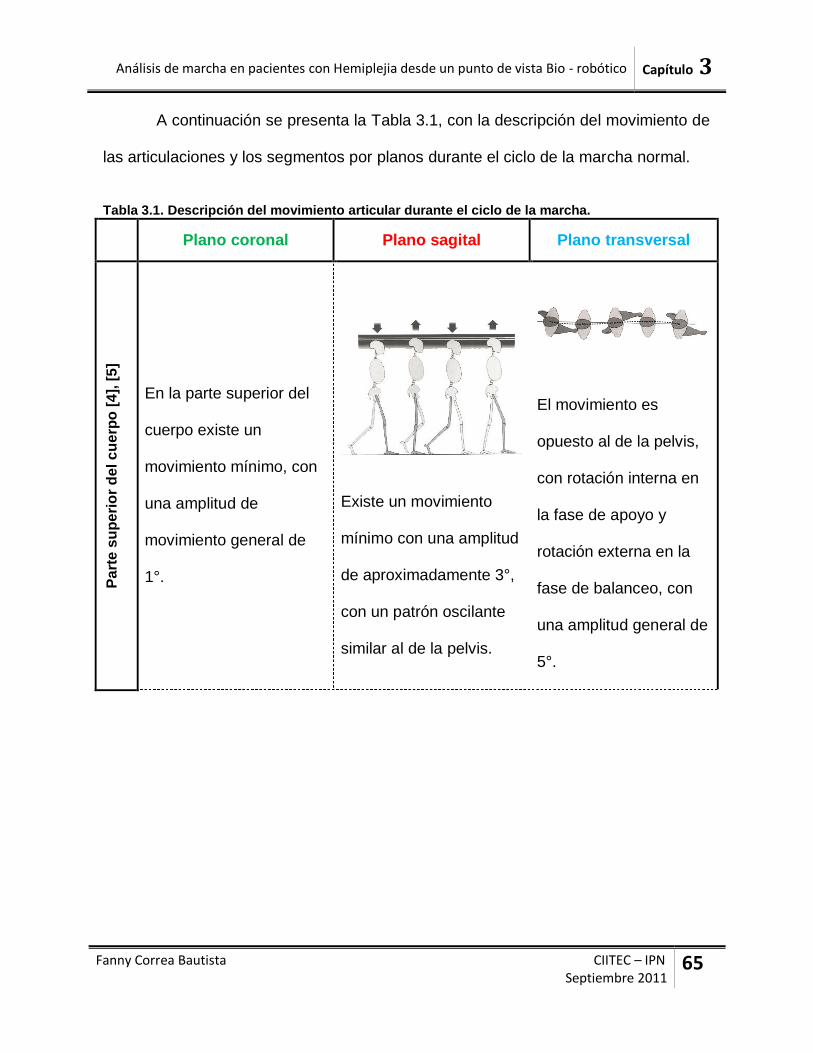
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
65
A continuación se presenta la Tabla 3.1, con la descripción del movimiento de
las articulaciones y los segmentos por planos durante el ciclo de la marcha normal.
Tabla 3.1. Descripción del movimiento articular durante el ciclo de la marcha.
Plano coronal Plano sagital Plano transversal
Pa
rte
su
pe
rio
r d
el c
ue
rpo
[4
], [
5]
En la parte superior del
cuerpo existe un
movimiento mínimo, con
una amplitud de
movimiento general de
1°.
Existe un movimiento
mínimo con una amplitud
de aproximadamente 3°,
con un patrón oscilante
similar al de la pelvis.
El movimiento es
opuesto al de la pelvis,
con rotación interna en
la fase de apoyo y
rotación externa en la
fase de balanceo, con
una amplitud general de
5°.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
66
Pe
lvis
[4
], [
5]
Ésta se eleva desde el
balanceo medio y la
respuesta de carga que
desciende al apoyo
medio hasta el balanceo
inicial. La amplitud de
movimiento general de la
pelvis es de 4º y 8°
aproximadamente y la
posición neutral ocurre
en la postura media y el
balanceo medio.
Por lo general se inclina
hacia delante entre 4 y
10°. Un patrón oscilante
leve muestra una
inclinación anterior
creciente durante la
postura media y el
balanceo inicial; la
amplitud general de
movimiento es de unos
4°.
La amplitud del
movimiento general de
la pelvis es de
aproximadamente 10°,
formados por pocos
grados de rotación
interna durante el
contacto inicial, rotación
externa durante la fase
de postura, ligera
rotación externa en la
fase de “despegue” y
rotación interna en la
fase de balanceo.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
67
Ca
de
ra [
4]
El movimiento imita al de
la pelvis en el plano
coronal. La cadera
alcanza por lo general su
aducción máxima
durante la respuesta de
carga y progresivamente
se abduce durante el
resto de la fase de
apoyo; alcanza su
abducción máxima en el
balanceo inicial. La
amplitud de movimiento
general de la cadera es
de 13°.
La cadera se extiende
durante toda la fase de
apoyo desde su máxima
flexión que es de 37°,
obtenida en el balanceo
terminal, hasta su
máxima extensión en la
postura terminal (6°); la
flexión comienza en el
pre-balanceo y continua
durante toda la fase de
balanceo. La amplitud
del movimiento es de
43°.
Con relación a la pelvis,
el muslo realiza una
ligera rotación interna
durante la mayor parte
de la fase de apoyo y
rotación externa durante
el balanceo inicial, con
una amplitud de
movimiento general de
aproximadamente 8°.
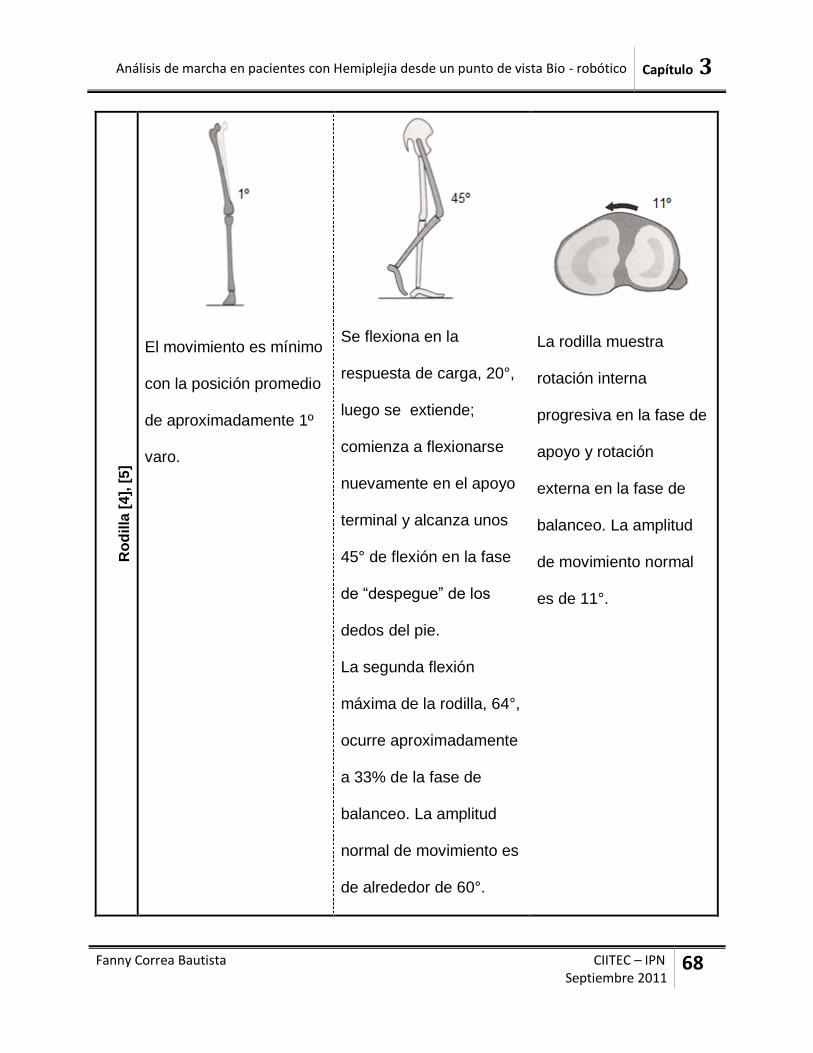
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
68
Ro
dilla
[4
], [
5]
El movimiento es mínimo
con la posición promedio
de aproximadamente 1º
varo.
Se flexiona en la
respuesta de carga, 20°,
luego se extiende;
comienza a flexionarse
nuevamente en el apoyo
terminal y alcanza unos
45° de flexión en la fase
de “despegue” de los
dedos del pie.
La segunda flexión
máxima de la rodilla, 64°,
ocurre aproximadamente
a 33% de la fase de
balanceo. La amplitud
normal de movimiento es
de alrededor de 60°.
La rodilla muestra
rotación interna
progresiva en la fase de
apoyo y rotación
externa en la fase de
balanceo. La amplitud
de movimiento normal
es de 11°.
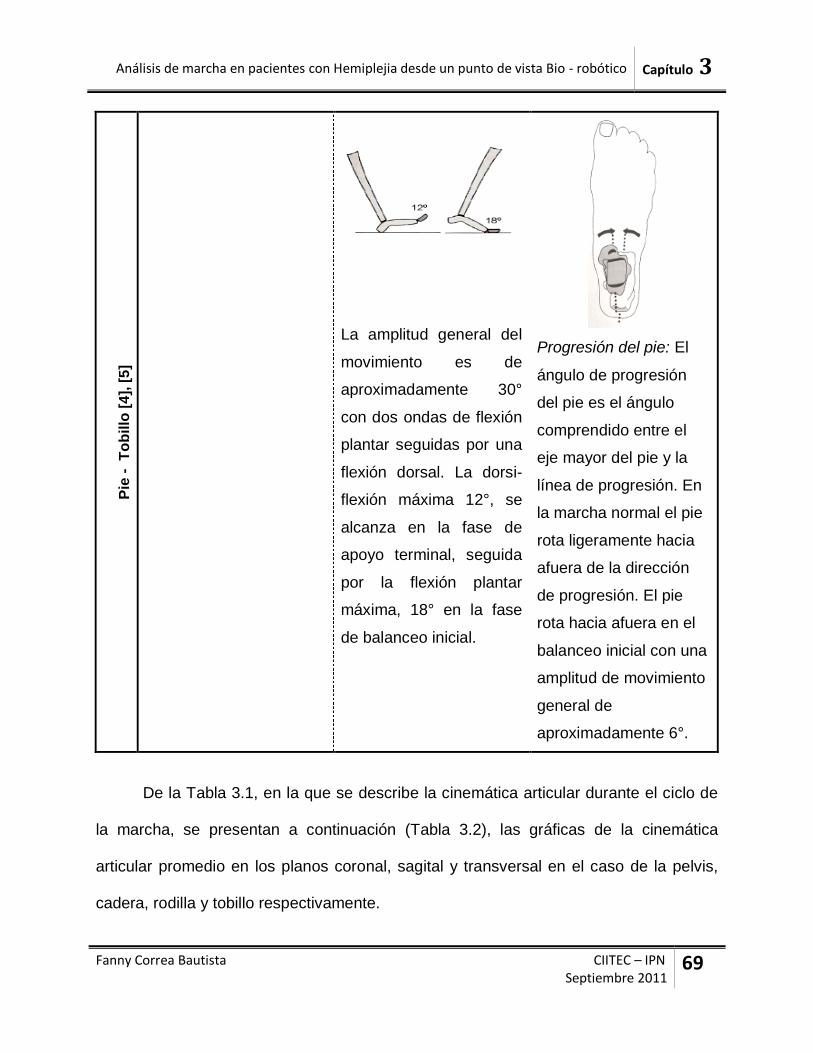
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
69
Pie
- T
ob
illo
[4
], [
5]
La amplitud general del
movimiento es de
aproximadamente 30°
con dos ondas de flexión
plantar seguidas por una
flexión dorsal. La dorsi-
flexión máxima 12°, se
alcanza en la fase de
apoyo terminal, seguida
por la flexión plantar
máxima, 18° en la fase
de balanceo inicial.
Progresión del pie: El
ángulo de progresión
del pie es el ángulo
comprendido entre el
eje mayor del pie y la
línea de progresión. En
la marcha normal el pie
rota ligeramente hacia
afuera de la dirección
de progresión. El pie
rota hacia afuera en el
balanceo inicial con una
amplitud de movimiento
general de
aproximadamente 6°.
De la Tabla 3.1, en la que se describe la cinemática articular durante el ciclo de
la marcha, se presentan a continuación (Tabla 3.2), las gráficas de la cinemática
articular promedio en los planos coronal, sagital y transversal en el caso de la pelvis,
cadera, rodilla y tobillo respectivamente.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
70
Tabla 3.2. Cinemática articular normal de la marcha [4].
Plano coronal Plano sagital Plano transversal
Pe
lvis
Cad
era
Ro
dil
la
Pie
- T
ob
illo
La descripción de la cinemática articular que ocurre durante un ciclo de marcha
permite identificar el espacio de configuraciones admisible durante un ciclo de marcha
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
71
normal que se toma como base de comparación con la respuesta a la marcha
patológica. En la sección siguiente, y considerando aspectos cinemáticos que rigen la
biomecánica de marcha, se propone un procedimiento de evaluación y tratamiento para
pacientes con marcha patológica, siendo de especial interés el paciente hemipléjico.
3.4. Propuesta metodológica para evaluación de la marcha.
La locomoción de los seres humanos incluye secuencias de movimientos que
difícilmente se captan o son comprendidas sin determinadas herramientas o equipos de
diagnóstico específicos. De tal manera que el problema se complica cuando existen
alteraciones en dichos movimientos, como la marcha, afectada por un daño
neurológico. En ésta sección, se presenta la propuesta metodológica para evaluación y
estudio cinemático del ciclo de la marcha, la cual comprende el análisis biomecánico de
las extremidades inferiores del cuerpo, que comprende: la pelvis, la cadera, la rodilla y
el tobillo de tal manera que pueda ser utilizado en el diagnóstico y tratamiento de la
deficiencia identificada. La propuesta es basada en conocer el desempeño motriz a
través de los límites de movimiento articular en 24 de los movimientos articulares
biomecánicos del cuerpo humano, particularmente en extremidades inferiores y que
describen desplazamientos angulares en cada uno de los planos anatómicos
(transversal, sagital y coronal) correlacionados al movimiento asumido como normal.
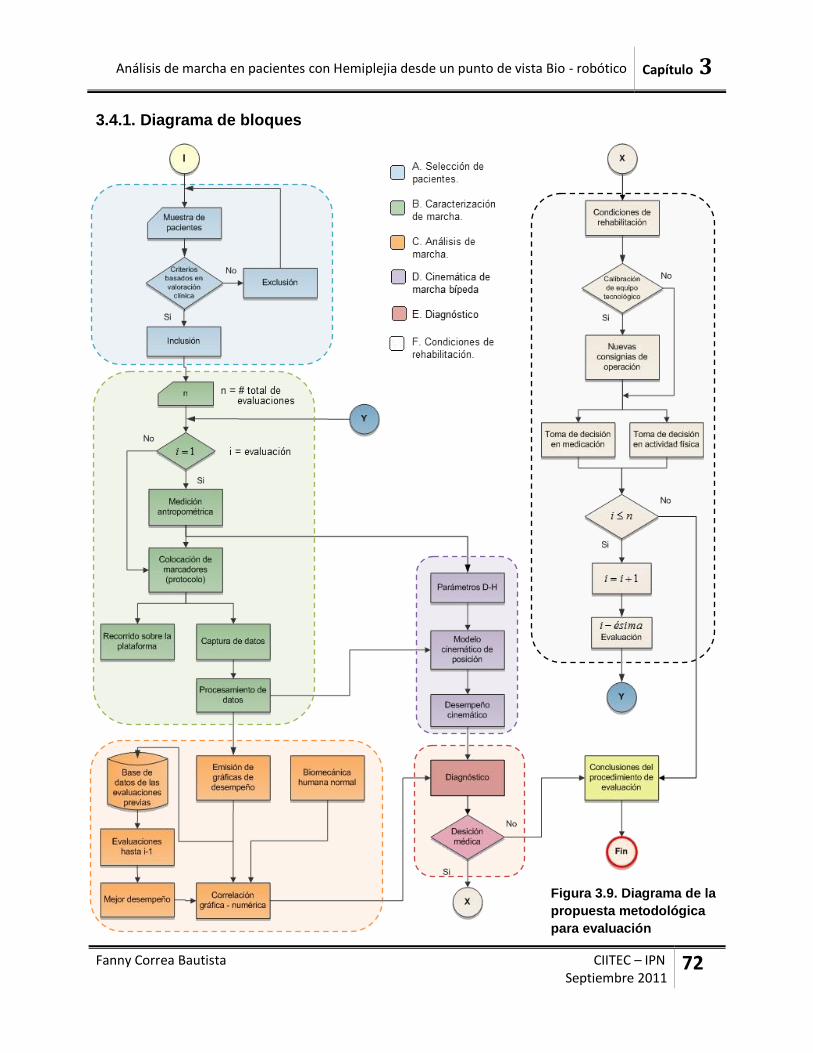
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
72
3.4.1. Diagrama de bloques
Figura 3.9. Diagrama de la
propuesta metodológica
para evaluación
de la marcha.
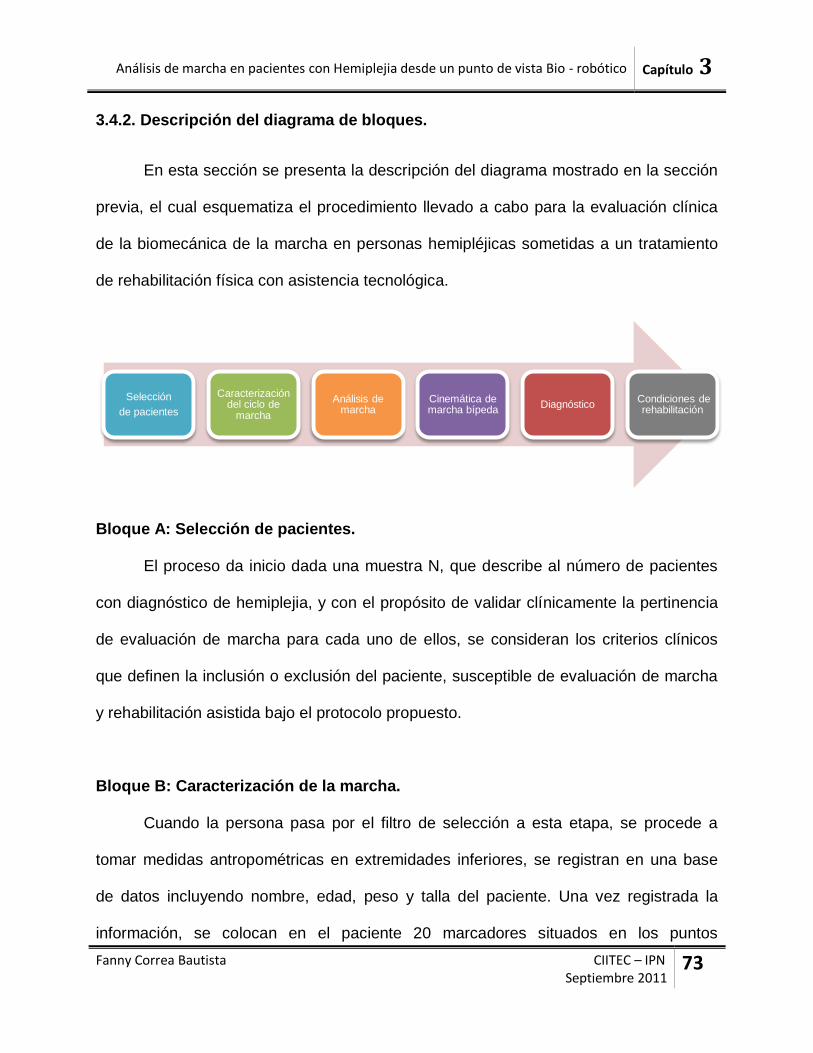
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
73
3.4.2. Descripción del diagrama de bloques.
En esta sección se presenta la descripción del diagrama mostrado en la sección
previa, el cual esquematiza el procedimiento llevado a cabo para la evaluación clínica
de la biomecánica de la marcha en personas hemipléjicas sometidas a un tratamiento
de rehabilitación física con asistencia tecnológica.
Bloque A: Selección de pacientes.
El proceso da inicio dada una muestra N, que describe al número de pacientes
con diagnóstico de hemiplejia, y con el propósito de validar clínicamente la pertinencia
de evaluación de marcha para cada uno de ellos, se consideran los criterios clínicos
que definen la inclusión o exclusión del paciente, susceptible de evaluación de marcha
y rehabilitación asistida bajo el protocolo propuesto.
Bloque B: Caracterización de la marcha.
Cuando la persona pasa por el filtro de selección a esta etapa, se procede a
tomar medidas antropométricas en extremidades inferiores, se registran en una base
de datos incluyendo nombre, edad, peso y talla del paciente. Una vez registrada la
información, se colocan en el paciente 20 marcadores situados en los puntos
Selección
de pacientes
Caracterización del ciclo de
marcha
Análisis de marcha
Cinemática de marcha bípeda
DiagnósticoCondiciones de rehabilitación
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
74
anatómicos de acuerdo al protocolo de Davis [11], que señala principalmente los
puntos donde se encuentran las prominencias óseas. Posteriormente, el paciente se
coloca sobre la plataforma dinamométrica con el propósito de efectuar un recorrido en
línea recta tantas veces como lo indique el médico que al mismo tiempo esta
capturando la información que recibe de las cámaras infrarrojas. Cuando el paciente
termina de hacer su recorrido, el médico especialista procesa la información capturada
obteniendo así los parámetros espacio-temporales y las gráficas que caracterizan la
biomecánica de la marcha de la persona valorada.
Bloque C: Análisis de marcha.
Una vez caracterizada (gráfica y numéricamente) la marcha patológica del
paciente, se hace un análisis de ésta información comparándola con la biomecánica de
la marcha humana normal. Para cada paciente se realizan “n” número de evaluaciones
(definidas a partir de los criterios clínicos descritos en el Bloque A), donde “i” es la
evaluación en proceso, cada una de ellas se almacena en una base de datos
organizada de acuerdo al desempeño biomecánico, empleando la mejor evaluación
hasta el evento i-1 para correlacionarlo grafica y numéricamente con los parámetros de
marcha normales y los resultados de la evaluación actual i. El resultado pasa a la etapa
de diagnóstico que corresponde al bloque E.
Bloque D: Cinemática de marcha bípeda.
De la medición antropométrica se definen las longitudes que existen entre las
marcas de referencia (prominencias óseas) correspondientes a cada articulación, y que
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
75
describen a los parámetros cinemáticos de Denavit-Hartemberg (PD-H). Los PD-H
representativos del paciente son evaluados en el modelo cinemático directo de posición
(MCDP) generalizado y que es descrito a partir de la cadena cinemática de miembros
inferiores. El MCDP particular (del paciente en estudio: MCDP-P) permite relacionar a
los ángulos en las articulaciones con las evoluciones cartesianas u operativas durante
el ciclo de marcha. Para ello, la caracterización de marcha a través de los cambios
articulares son evaluados en el MCDP-P para verificar el desempeño cinemático a
través de las gráficas comparativas o en el mejor de los casos, a través de escenarios
virtuales con animación en traslación, rotación y escala.
Bloque E: Diagnóstico.
En esta etapa del procedimiento para evaluación de la marcha, se realiza un
diagnóstico clínico realizado a partir de tres aspectos relevantes: i) La condición
biomecánica actual del paciente, descrita a través de gráficas y datos numéricos, ii) La
evolución en el desempeño biomecánico del paciente, definida a partir de evaluaciones
previas, y iii) El análisis cinemático a partir del modelo obtenido del paciente y la
caracterización de marcha. El diagnóstico prescrito por el médico, será base para
definir las nuevas condiciones de rehabilitación, o en su caso dar a conocer un
dictamen o conclusión del procedimiento de evaluación y rehabilitación. Por lo tanto,
Bloque F: Condiciones de rehabilitación.
Cuando se ha realizado clínica y biomecanicamente el análisis de marcha y se
da el diagnóstico del paciente, es importante revisar cuáles han sido los beneficios
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
76
obtenidos, así como los retrocesos en la rehabilitación, en caso de haberlos. De tal
manera que se planteen las condiciones específicas de los cambios que deben
hacerse, tomando en cuenta que se deben minimizar las deficiencias detectadas en el
diagnóstico, calibrando el equipo tecnológico empleado para el estudio, así como la
modificación en la configuración del mismo, estableciendo nuevas consignas de
operación más objetivas y personalizadas. En caso de no encontrar alteraciones
significativas (negativas) en el diagnóstico se tomarán decisiones de medicación y
actividad física para continuar el proceso de evaluación de la marcha, siempre y
cuando el número de evaluación en el que se encuentre la persona, sea menor o igual
al total de evaluaciones establecidas al inicio de la sesión. Si es el caso, el
procedimiento se repite, iniciando a partir de la caracterización de la marcha.
3.4.3 Procedimiento
A. Selección de pacientes.
El objeto en estudio para llevar a cabo la caracterización del ciclo de marcha
patológica, que corresponde al diagnóstico de Hemiplejia, son las personas que la
padecen, así como las personas sanas que sirven de referencia para hacer una
comparación entre el ciclo de marcha normal y patológico de acuerdo a los parámetros
obtenidos, resultado del análisis de marcha. Por ello, es necesario hacer una selección,
exhaustiva de tales personas de acuerdo a criterios de inclusión y exclusión
establecidos.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
77
i. Muestra de pacientes
La muestra de pacientes se realizo mediante la aplicación de una encuesta con
validación médica (Ver Apéndice A) que recaba datos personales del paciente,
diagnóstico, fecha de accidente cerebro vascular, entre otros datos significativos; así
como la invitación directa a médicos, especialistas en neurorehabilitación y
fisioterapeutas, para colaborar en este trabajo de investigación, ya que canalizan a
pacientes como candidatos para el estudio.
De ésta manera se obtiene una muestra de pacientes que procederán a ser
evaluados conforme a los criterios de inclusión y exclusión descritos en el siguiente
apartado.
ii. Criterios basados en valoración clínica: inclusión y exclusión
Dentro de un trabajo de investigación, la selección de las personas que serán
objeto de estudio, es considerada como un factor importante ya que no todos los
pacientes que tengan un diagnóstico clínico de Hemiplejia son aptos para el análisis de
marcha, cuya característica principal para ser elegidas, es que sean pacientes
ambulatorios después de haber sufrido un accidente cerebrovascular y haber ingresado
consecutivamente a un centro o clínica de rehabilitación. De acuerdo a la experiencia
del área médica relacionada con el caso de estudio, se han establecido los criterios de
inclusión y exclusión para la aplicación del procedimiento de evaluación en el ciclo de
marcha, definidos a continuación.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
78
Criterios de inclusión.
Los pacientes deben ser seleccionados bajo los siguientes criterios de inclusión:
a) Daño hemipléjico como consecuencia de un infarto cerebral;
c) Independencia total o parcial para caminar;
d) Pleno uso de sus facultades mentales;
e) Ser capaz de recibir órdenes y seguir instrucciones.
Criterios de exclusión.
Es excluido para el estudio, aquel paciente que:
a) No es capaz de dar 5 pasos consecutivos sobre una plataforma;
b) Tiene problemas de deficit intelectual;
c) Requerir el uso de órtesis para su marcha y que sin ella no logre dar un paso.
B. Caracterización del ciclo de marcha.
La marcha es caracterizada por la repetición de los movimientos corporales,
existiendo en cada paso un pequeño intervalo de tiempo (que para el interés del trabajo
de investigación se asume como un porcentaje en el ciclo de marcha), en que se
encuentran los dos pies apoyados en el suelo, y un solo pie soporta el peso del
cuerpo. Durante el período de contacto con la superficie de marcha el pie está
relativamente estacionario, y al proporcionar el soporte del cuerpo existen fuerzas
actuando entre el pie y dicha superficie. La sesión de caracterización de marcha tiene
una duración aproximada de 30 a 40 min, lo que dependerá de las características de
cada paciente, de la etapa en la que se encuentre, la magnitud de afectación motriz y

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
79
psicológica, ya que aún cuando se han pasado los criterios de inclusión, estas
consideraciones pueden variar el tiempo de la sesión.
i. Medición antropométrica.
El paciente debe familiarizarse con el personal que realizará el estudio de la
marcha, así como del laboratorio y equipo utilizado durante la sesión (recomendación
clínica preliminar para toma de confianza de parte del paciente); esto con el propósito
de realizar mediciones antropométricas, además de peso y estatura, de las
extremidades inferiores del cuerpo humano de interés para el estudio, tales como:
ancho, altura y longitud de pelvis; ancho de rodilla y tobillo; longitud del muslo, pierna y
pie; así como amplitud angular en articulaciones entre elementos inferiores. Para ello
se emplean dispositivos de medición como: balanza de pie, estadiómetro, pelvímetro,
cinta métrica y goniómetro [6].
ii. Colocación de marcadores.
Los aspectos que toman mayor influencia durante el proceso para adquirir datos
en el análisis de marcha es la colocación de los marcadores, y son empleados para
detectar los puntos anatómicos, ver Figura 3.10. Lo ideal para obtener los movimientos
más precisos de los huesos sería ubicar los marcadores directamente adheridos a las
estructuras óseas, pero evidentemente es imposible (representa un riesgo para el
procedimiento y los movimientos naturales). Por ello, se utilizan marcadores adheridos
a la piel en puntos anatómicos específicos, según el protocolo de Davis [7] [8].
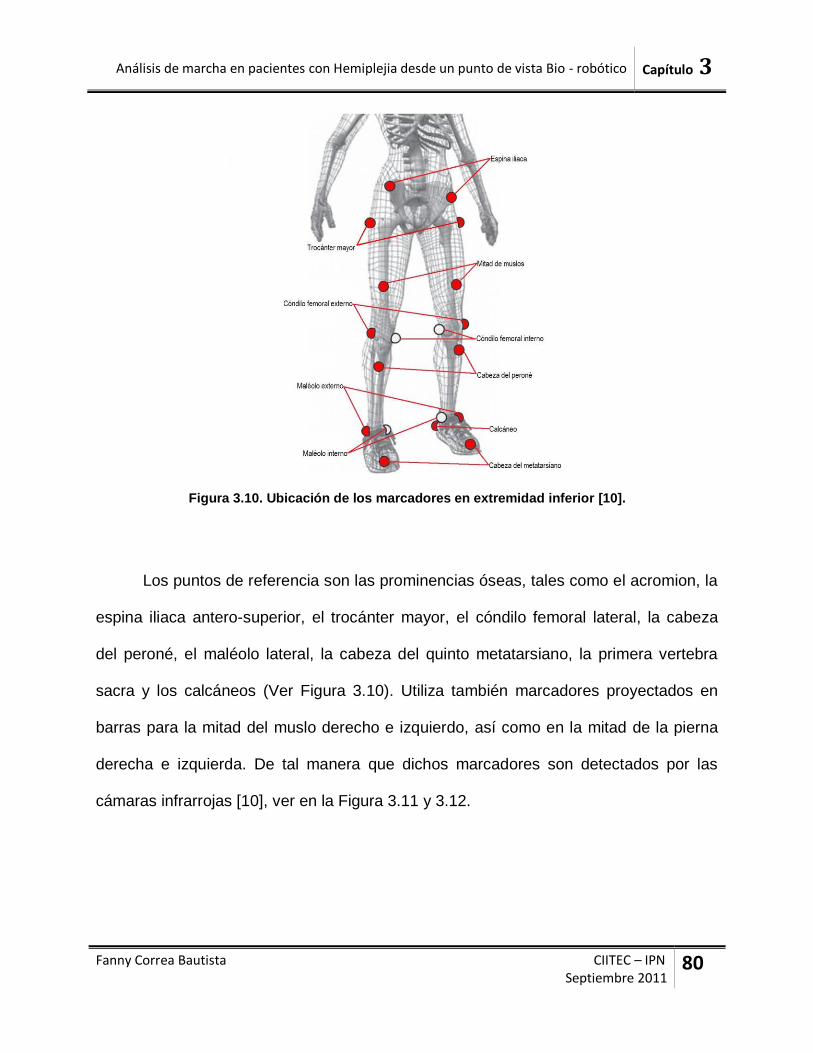
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
80
Figura 3.10. Ubicación de los marcadores en extremidad inferior [10].
Los puntos de referencia son las prominencias óseas, tales como el acromion, la
espina iliaca antero-superior, el trocánter mayor, el cóndilo femoral lateral, la cabeza
del peroné, el maléolo lateral, la cabeza del quinto metatarsiano, la primera vertebra
sacra y los calcáneos (Ver Figura 3.10). Utiliza también marcadores proyectados en
barras para la mitad del muslo derecho e izquierdo, así como en la mitad de la pierna
derecha e izquierda. De tal manera que dichos marcadores son detectados por las
cámaras infrarrojas [10], ver en la Figura 3.11 y 3.12.
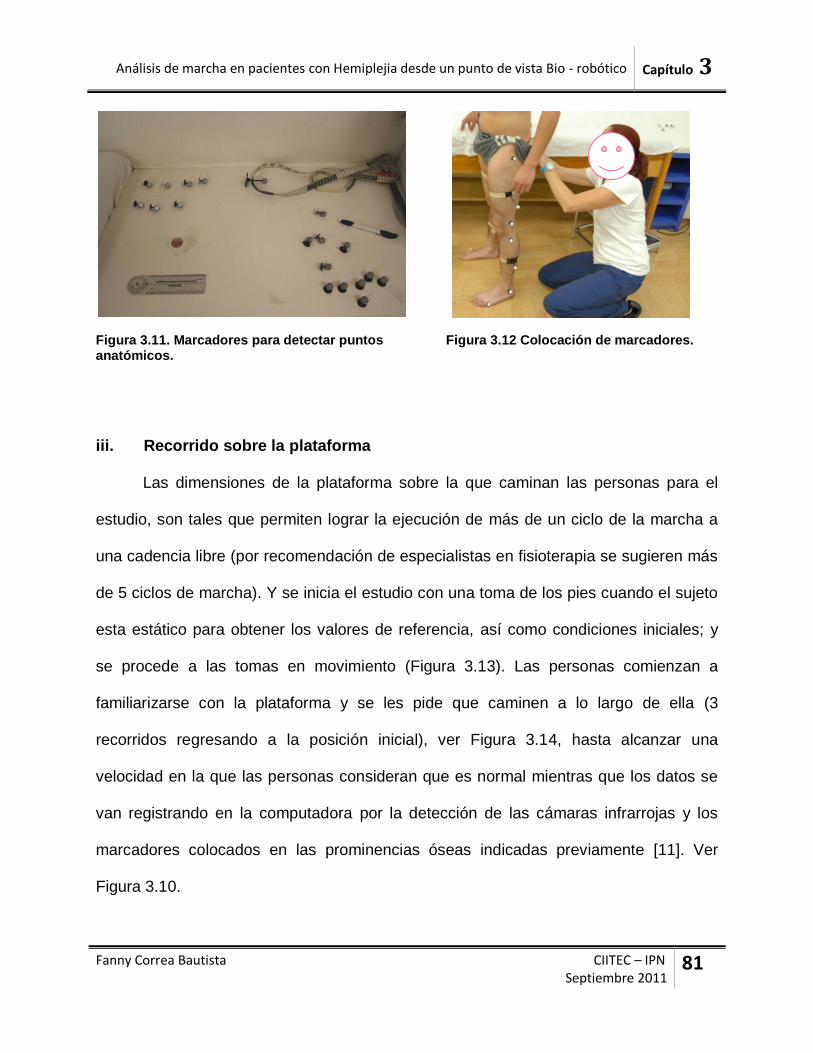
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
81
Figura 3.11. Marcadores para detectar puntos anatómicos.
Figura 3.12 Colocación de marcadores.
iii. Recorrido sobre la plataforma
Las dimensiones de la plataforma sobre la que caminan las personas para el
estudio, son tales que permiten lograr la ejecución de más de un ciclo de la marcha a
una cadencia libre (por recomendación de especialistas en fisioterapia se sugieren más
de 5 ciclos de marcha). Y se inicia el estudio con una toma de los pies cuando el sujeto
esta estático para obtener los valores de referencia, así como condiciones iniciales; y
se procede a las tomas en movimiento (Figura 3.13). Las personas comienzan a
familiarizarse con la plataforma y se les pide que caminen a lo largo de ella (3
recorridos regresando a la posición inicial), ver Figura 3.14, hasta alcanzar una
velocidad en la que las personas consideran que es normal mientras que los datos se
van registrando en la computadora por la detección de las cámaras infrarrojas y los
marcadores colocados en las prominencias óseas indicadas previamente [11]. Ver
Figura 3.10.
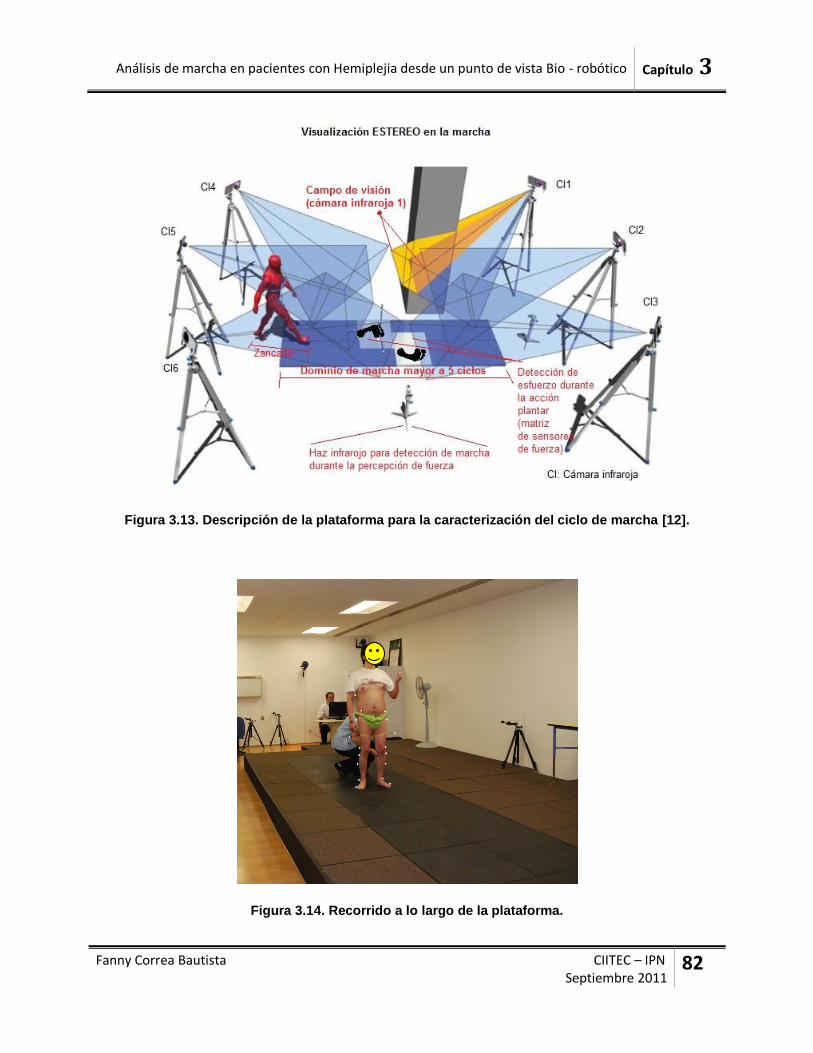
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
82
Figura 3.13. Descripción de la plataforma para la caracterización del ciclo de marcha [12].
Figura 3.14. Recorrido a lo largo de la plataforma.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
83
iv y v. Captura y procesamiento de datos.
El paciente se considera embebido en el primer octante en R3 (espacio
cartesiano) cuyo marco ortonormal base (x, y, z) describe los planos útiles para la
caracterización de movimiento. Por ejemplo: plano YZ corresponde al plano coronal o
frontal, plano XZ comprende el desempeño en el plano sagital y finalmente el plano XY
constituye al plano transversal (ver Figura 3.2). Para describir el procedimiento de
captura y procesamiento de datos, se ejemplifica la acción en el plano sagital,
particularmente con una tarea de flexo-extensión de rodilla.
El ejemplo siguiente ilustra el proceso de captura de datos útiles para la
caracterización de la flexo-extensión de la rodilla, tomando en consideración los
procedimientos previamente definidos, se sitúan 4 marcadores que permitirán
identificar la posición cartesiana instantánea en el plano sagital (x,z), particularmente
como prominencia ósea en el trocante, cóndilo, peroné y maleólo. Las cámaras
infrarojas identificarán la posición cartesiana con relación a un marco ortonormal de
referencia base identificando los cambios que ocurren en las coordenadas de los
marcadores elegidos. La Figura 3.15 ilustra los marcadores que permiten ilustrar el
proceso de captura, e implica el conocer las coordenadas cartesianas: T(xt,zt),
C(xc,zc), P(xp,zp) y M(xm,zm), información útil para el procesamiento.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
84
Tabla 3.3 Descripción de
marcadores y nomenclatura de
pares ordenados identificados
por cámara infraroja
Descripción de variables en
el plano sagital (plano xz)
para una tarea de flexo-
extensión de rodilla.
Marcadores: Trocante (T),
Cóndilo (C), Peroné (P) y
Maleolo (M); y sus
correspondientes
coordenadas cartesianas
identificadas por las
cámaras infrarojas: T(xt, zt),
C(xc, zc), P(xp, zp) y M(xm,
zm) respectivamente.
Figura 3.15 Descripción de marcadores para la caracterización
de flexo-extensión de rodilla identificadas por una cámara
infraroja en el plano xz o plano sagital.
En la Figura 3.16 se ilustra la estructura ósea y marcadores empleados en el
procedimiento de captura. El procesamiento de la información adquirida consiste en
calcular las pendientes de las rectas involucradas, así definiremos las dos rectas
siguientes:
Recta 1 (LTC) Definida entre los marcadores T (Trocante) y C (Cóndilo).
Recta 2 (LPM) Definida entre los marcadores P (Peroné) y M (Maleolo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
85
Figura 3.16 Procedimiento para el procesamiento de datos capturados.
El propósito del procedimiento de la información capturada es conocer el valor
de la amplitud angular de la rodilla durante las acciones de flexión y extensión. Para
ello se emplea el siguiente procedimiento:
1. Cálculo de la pendiente de LTC:
(EC.1)
2. Cálculo de la pendiente LPM:
(EC. 2)
3. Cálculo de la amplitud angular de
la rodilla:
(EC. 3)
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
86
De esta manera se capturan los datos de todos los marcadores empleados y se
procesan de la misma manera para encontrar las amplitudes angulares en las distintas
articulaciones durante el ciclo de marcha. Toda esta información será útil para el
correspondiente análisis.
C. Análisis de marcha.
El uso clínico del análisis de marcha se basa en la comparación de medidas
derivadas del análisis de la cinemática, cinética y fisiología muscular del aparato
locomotor. En el estudio se hace una evaluación de la marcha en individuos sanos y
pacientes hemipléjicos con desviaciones asimétricas de la locomoción, debidas el daño
cerebrovascular [15]. La definición de análisis de la marcha es amplia e incluye un
gran variedad de técnicas que van desde el análisis de marcha mediante observación
hasta el análisis tridimensional asistido por computadora del movimiento. Los
laboratorios de análisis del movimiento están integrados por equipos multidisciplinares
(médicos, ingenieros, biólogos) que, utilizando una amplia variedad de recursos
tecnológicos, abordan el estudio del movimiento desde diversas perspectivas. Así, en el
caso particular de este trabajo, los parámetros generales de la marcha humana son
analizados mediante las siguientes categorías de estudio:
El análisis descriptivo del ciclo de marcha consiste en el examen de los
parámetros generales de la marcha humana, que incluye las características
espaciotemporales: velocidad, cadencia, longitud y distancia de paso.
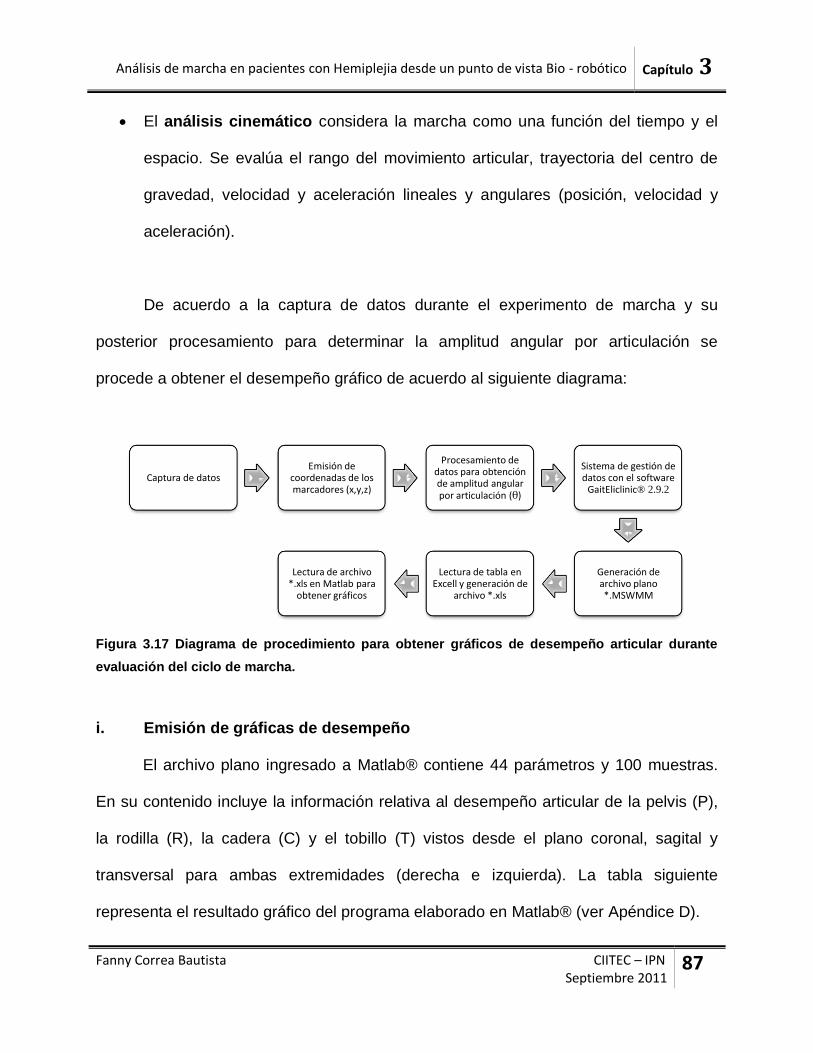
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
87
El análisis cinemático considera la marcha como una función del tiempo y el
espacio. Se evalúa el rango del movimiento articular, trayectoria del centro de
gravedad, velocidad y aceleración lineales y angulares (posición, velocidad y
aceleración).
De acuerdo a la captura de datos durante el experimento de marcha y su
posterior procesamiento para determinar la amplitud angular por articulación se
procede a obtener el desempeño gráfico de acuerdo al siguiente diagrama:
Figura 3.17 Diagrama de procedimiento para obtener gráficos de desempeño articular durante
evaluación del ciclo de marcha.
i. Emisión de gráficas de desempeño
El archivo plano ingresado a Matlab® contiene 44 parámetros y 100 muestras.
En su contenido incluye la información relativa al desempeño articular de la pelvis (P),
la rodilla (R), la cadera (C) y el tobillo (T) vistos desde el plano coronal, sagital y
transversal para ambas extremidades (derecha e izquierda). La tabla siguiente
representa el resultado gráfico del programa elaborado en Matlab® (ver Apéndice D).
Captura de datosEmisión de
coordenadas de los marcadores (x,y,z)
Procesamiento de datos para obtención de amplitud angular por articulación (θ)
Sistema de gestión de datos con el software
GaitEliclinic® 2.9.2
Generación de archivo plano *.MSWMM
Lectura de tabla en Excell y generación de
archivo *.xls
Lectura de archivo *.xls en Matlab para
obtener gráficos
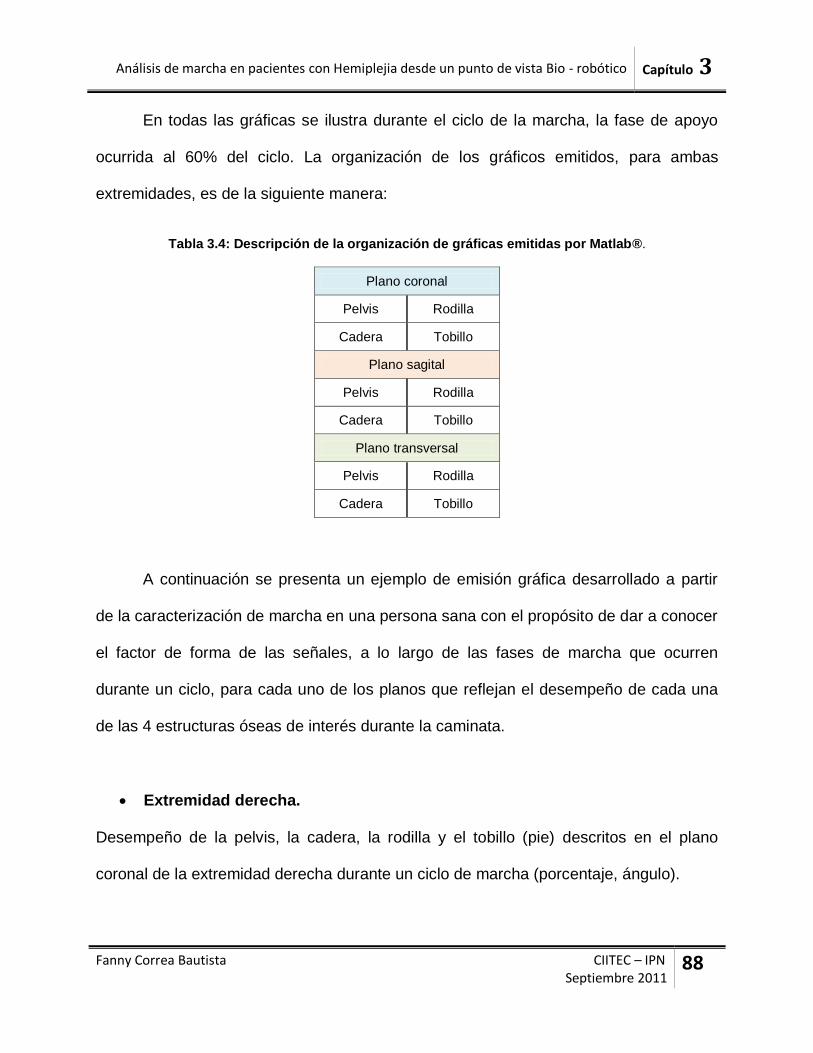
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
88
En todas las gráficas se ilustra durante el ciclo de la marcha, la fase de apoyo
ocurrida al 60% del ciclo. La organización de los gráficos emitidos, para ambas
extremidades, es de la siguiente manera:
Tabla 3.4: Descripción de la organización de gráficas emitidas por Matlab®.
Plano coronal
Pelvis Rodilla
Cadera Tobillo
Plano sagital
Pelvis Rodilla
Cadera Tobillo
Plano transversal
Pelvis Rodilla
Cadera Tobillo
A continuación se presenta un ejemplo de emisión gráfica desarrollado a partir
de la caracterización de marcha en una persona sana con el propósito de dar a conocer
el factor de forma de las señales, a lo largo de las fases de marcha que ocurren
durante un ciclo, para cada uno de los planos que reflejan el desempeño de cada una
de las 4 estructuras óseas de interés durante la caminata.
Extremidad derecha.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
coronal de la extremidad derecha durante un ciclo de marcha (porcentaje, ángulo).
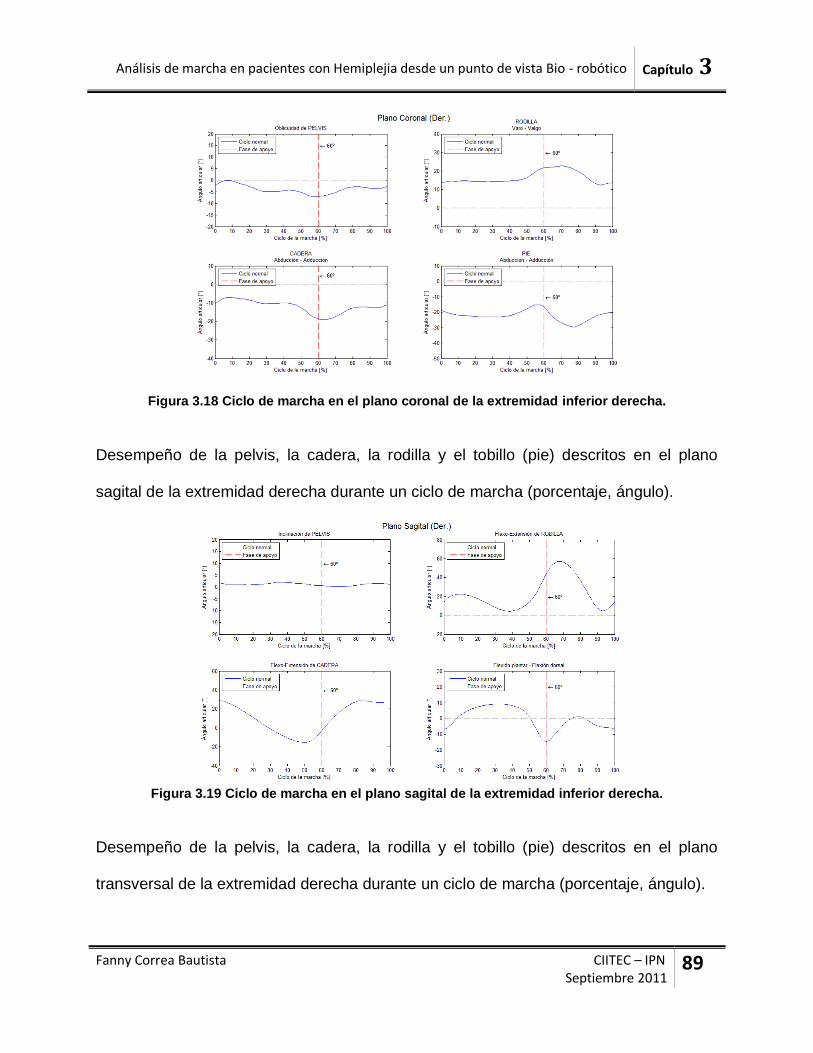
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
89
Figura 3.18 Ciclo de marcha en el plano coronal de la extremidad inferior derecha.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
sagital de la extremidad derecha durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.19 Ciclo de marcha en el plano sagital de la extremidad inferior derecha.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
transversal de la extremidad derecha durante un ciclo de marcha (porcentaje, ángulo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
90
Figura 3.20 Ciclo de marcha en el plano transversal de la extremidad inferior derecha.
Extremidad izquierda
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
coronal de la extremidad izquierda durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.21 Ciclo de marcha en el plano coronal de la extremidad inferior izquierda.
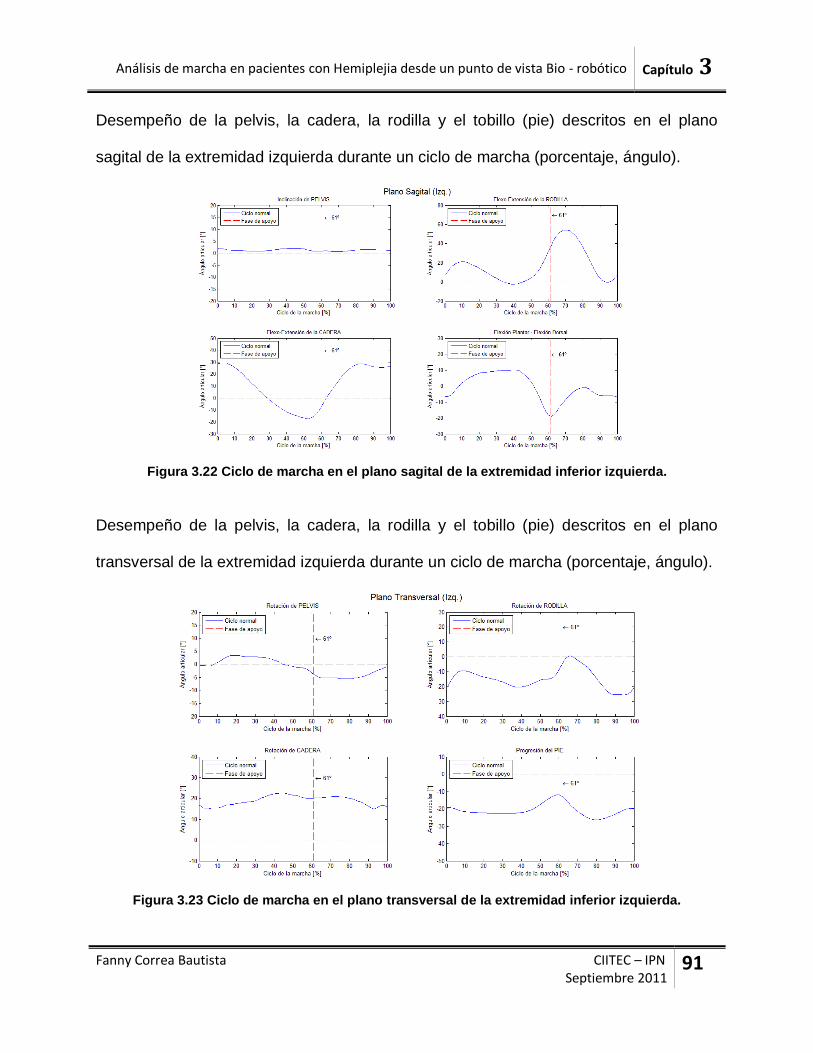
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
91
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
sagital de la extremidad izquierda durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.22 Ciclo de marcha en el plano sagital de la extremidad inferior izquierda.
Desempeño de la pelvis, la cadera, la rodilla y el tobillo (pie) descritos en el plano
transversal de la extremidad izquierda durante un ciclo de marcha (porcentaje, ángulo).
Figura 3.23 Ciclo de marcha en el plano transversal de la extremidad inferior izquierda.
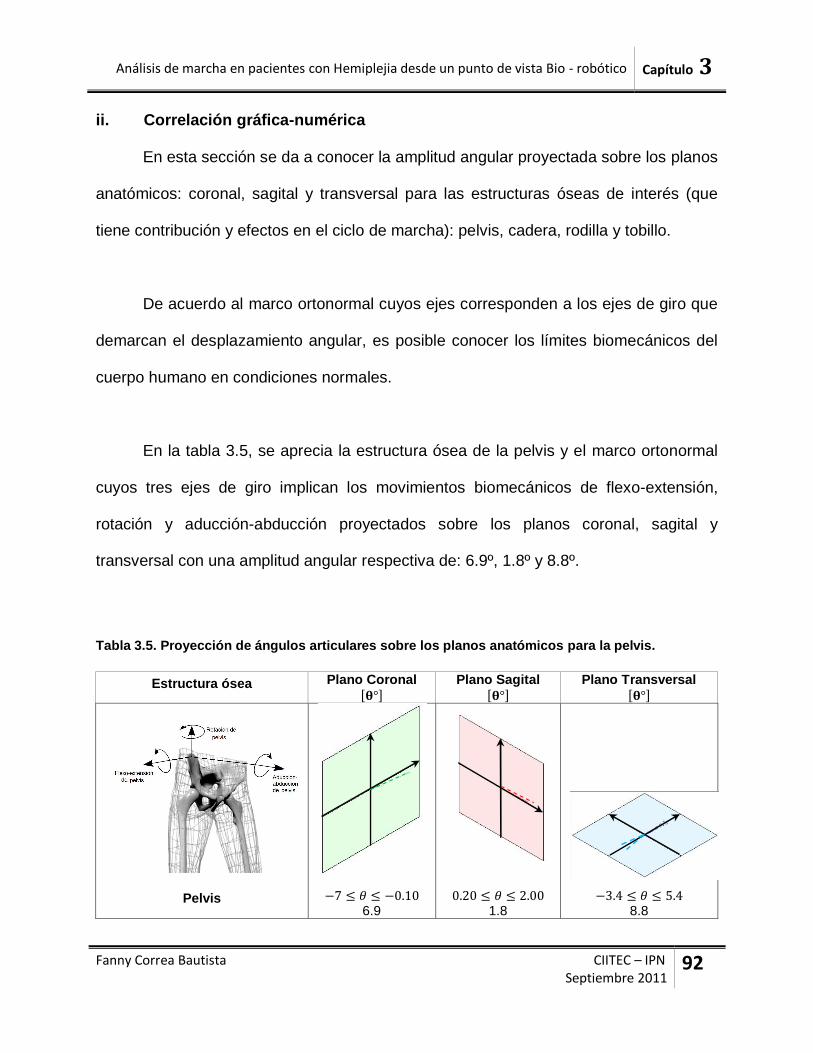
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
92
ii. Correlación gráfica-numérica
En esta sección se da a conocer la amplitud angular proyectada sobre los planos
anatómicos: coronal, sagital y transversal para las estructuras óseas de interés (que
tiene contribución y efectos en el ciclo de marcha): pelvis, cadera, rodilla y tobillo.
De acuerdo al marco ortonormal cuyos ejes corresponden a los ejes de giro que
demarcan el desplazamiento angular, es posible conocer los límites biomecánicos del
cuerpo humano en condiciones normales.
En la tabla 3.5, se aprecia la estructura ósea de la pelvis y el marco ortonormal
cuyos tres ejes de giro implican los movimientos biomecánicos de flexo-extensión,
rotación y aducción-abducción proyectados sobre los planos coronal, sagital y
transversal con una amplitud angular respectiva de: 6.9º, 1.8º y 8.8º.
Tabla 3.5. Proyección de ángulos articulares sobre los planos anatómicos para la pelvis.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Pelvis
6.9
1.8
8.8

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
93
En la tabla 3.6, se aprecia la estructura ósea de la cadera y el marco ortonormal
cuyos tres ejes de giro implican los movimientos biomecánicos de flexo-extensión,
rotación y aducción-abducción proyectados sobre los planos coronal, sagital y
transversal con una amplitud angular respectiva de: 11.9º, 44.2º y 7.10º.
Tabla 3.6. Proyección de ángulos articulares sobre los planos anatómicos para la cadera.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Cadera
11.9
44.2
7.10
En la tabla 3.7, se aprecia la estructura ósea de la rodilla y el marco ortonormal
cuyos tres ejes de giro implican los movimientos biomecánicos de flexo-extensión,
rotación y aducción-abducción proyectados sobre los planos coronal, sagital y
transversal con una amplitud angular respectiva de: 10.2º, 52.6º y 23.3º.
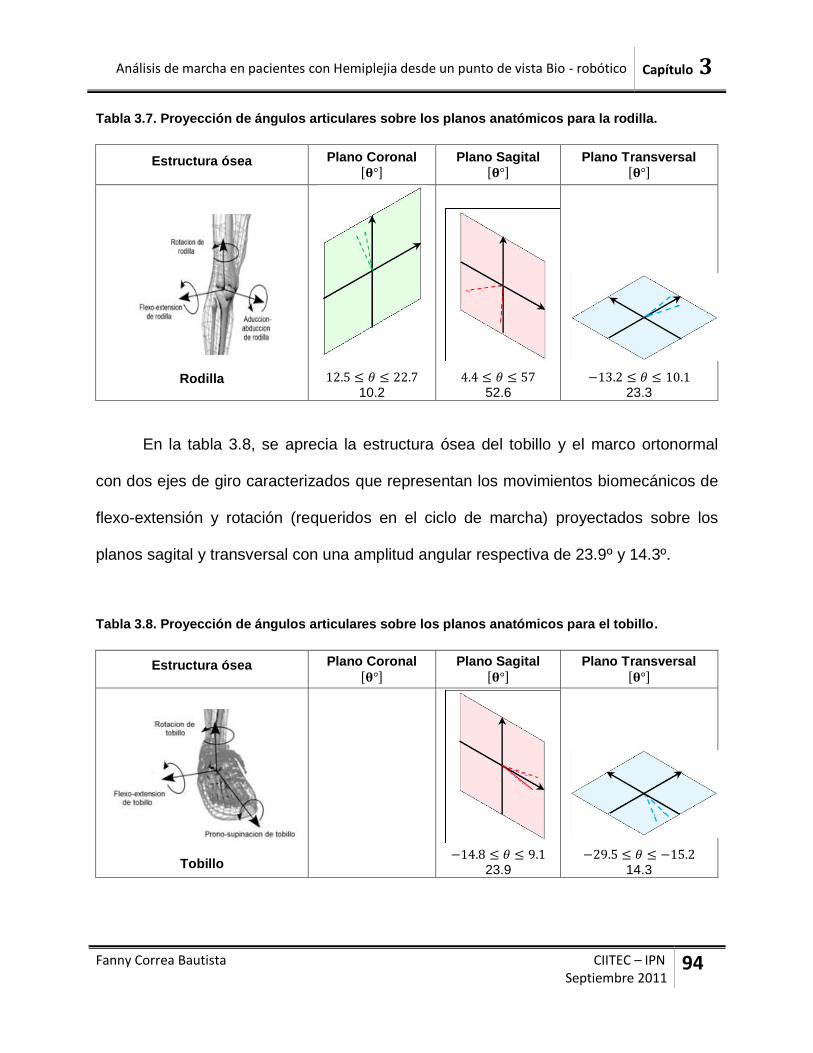
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
94
Tabla 3.7. Proyección de ángulos articulares sobre los planos anatómicos para la rodilla.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Rodilla
10.2
52.6
23.3
En la tabla 3.8, se aprecia la estructura ósea del tobillo y el marco ortonormal
con dos ejes de giro caracterizados que representan los movimientos biomecánicos de
flexo-extensión y rotación (requeridos en el ciclo de marcha) proyectados sobre los
planos sagital y transversal con una amplitud angular respectiva de 23.9º y 14.3º.
Tabla 3.8. Proyección de ángulos articulares sobre los planos anatómicos para el tobillo.
Estructura ósea Plano Coronal
Plano Sagital
Plano Transversal
Tobillo
23.9
14.3

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
95
iii. Biomecánica humana normal
En las tablas 3.4, 3.5, 3.6 y 3.7 se aprecian los desempeños biomecánicos de
cada estructura ósea y la amplitud angular que un humano tiene posibilidad de efectuar
bajo condiciones normales. Todo ello representa al espacio de configuraciones
admisibles que le permiten desarrollar actividades tales como: caminar, sentarse,
agacharse, ejercitarse, saltar con la contribución muscular (flexibilidad y elasticidad),
entre otras muy relevantes por ser comunes.
Sin embargo, en este trabajo de investigación, resulta de especial interés la
actividad humana de la caminata, es por ello de que se centra especial atención en el
estudio y evaluación del ciclo de marcha. En las Figuras 3.24 y 3.25 se presenta la
emisión de gráficas para el despliegue angular de flexo-extensión, rotación y aducción-
abducción en las 4 estructuras óseas de interés.
Cabe hacer mencionar, que para cada caso gráfico se proporcionan respuestas
de un paciente con hemiplejia y una persona sana. En ambos casos el contradominio
de graficación nunca excede de la amplitud angular descrita en las tablas 3.4, 3.5, 3.6
y 3.7. Pero la diferencia entre ellas, gráficamente es notable.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
96
Figura 3.24. Relación de la biomecánica de la pelvis para una
persona sana y un paciente.
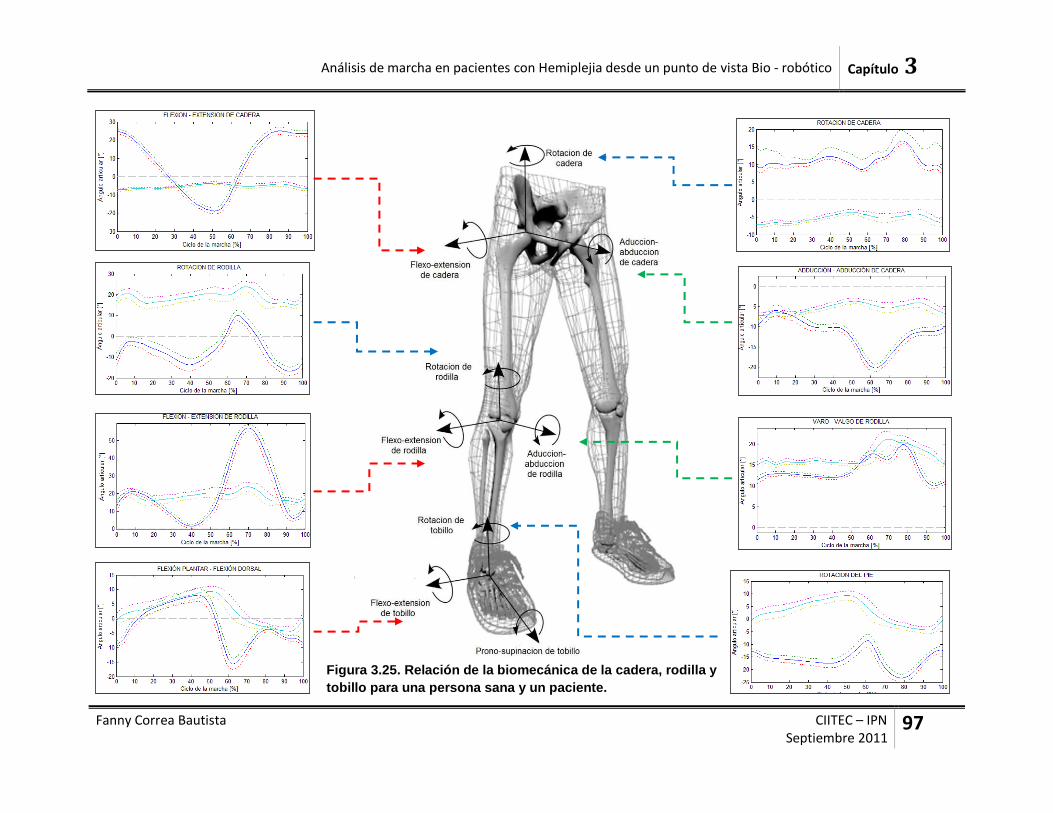
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
97
Figura 3.25. Relación de la biomecánica de la cadera, rodilla y
tobillo para una persona sana y un paciente.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
98
iv. Evaluación de marcha, almacenamiento y análisis de historial
En esta sección de la evaluación del ciclo de marcha se pretende conocer el
desempeño actual y el nivel de progreso, a partir del análisis descriptivo especificado
previamente. Para ello se consideran tres aspectos relevantes que conducen a una
conclusión; el primero de ellos consiste en almacenar conductas o desempeños del
ciclo de marcha previos, de manera tal que se actualiza el mejor de ellos por su
correlación con la marcha normal que representa la biomecánica de caminata ideal
(publicada y múltiplemente citada por la comunidad interesada), para esto el segundo
aspecto representa el desempeño actual que se compara con la mejor de las
evaluaciones previas, todo ello relativo al tercer aspecto que representa la marcha
normal.
La conclusión actual puede favorecer al procedimiento de evaluación por la
existencia de un progreso, cabe mencionar que puede existir un retroceso dado que el
paciente (sujeto de estudio y tratamiento) no cumple con las consignas médicas
establecidas en la evaluación previa, por lo que una evaluación previa puede tener un
mejor desempeño que la actual.
Para describir las reglas que permiten fundamentar la conclusión de la
evaluación actual, se presentan las siguientes condiciones posibles:
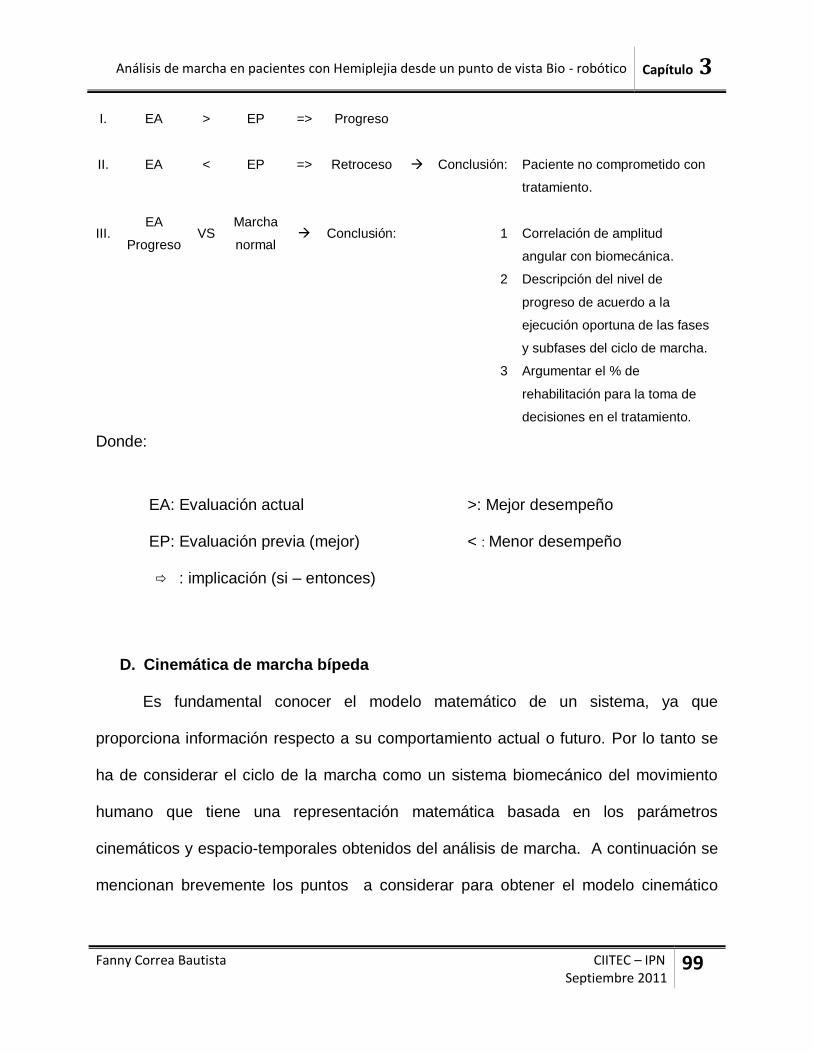
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
99
I. EA > EP => Progreso
II. EA < EP => Retroceso Conclusión:
Paciente no comprometido con
tratamiento.
III. EA
Progreso VS
Marcha
normal Conclusión: 1
Correlación de amplitud
angular con biomecánica.
2 Descripción del nivel de
progreso de acuerdo a la
ejecución oportuna de las fases
y subfases del ciclo de marcha.
3 Argumentar el % de
rehabilitación para la toma de
decisiones en el tratamiento.
Donde:
EA: Evaluación actual >: Mejor desempeño
EP: Evaluación previa (mejor) < : Menor desempeño
: implicación (si – entonces)
D. Cinemática de marcha bípeda
Es fundamental conocer el modelo matemático de un sistema, ya que
proporciona información respecto a su comportamiento actual o futuro. Por lo tanto se
ha de considerar el ciclo de la marcha como un sistema biomecánico del movimiento
humano que tiene una representación matemática basada en los parámetros
cinemáticos y espacio-temporales obtenidos del análisis de marcha. A continuación se
mencionan brevemente los puntos a considerar para obtener el modelo cinemático

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
100
directo de posición de la marcha bípeda que más adelante en el capítulo 5 se
desarrollará, y que en el Apéndice F se dan a conocer los conceptos básicos.
i. Parámetros Denavit-Hartenberg
Para obtener el modelo cinemático directo, se emplea el método sistemático de
Denavit-Hartenberg (D-H) para situar los sistemas de coordenadas asociados a cada
eslabón de la cadena cinemática. Este método, permite el paso de un eslabón al
siguiente mediante 4 trasformaciones básicas que relaciona el sistema de referencia
del elemento i con el sistema de referencia del elemento i-1.
ii. Modelo cinemático directo de posición
El Modelo Cinemático Directo de Posición (MCDP) es la representación
matemática de la cinemática de una cadena de eslabones serialmente interconectada
(cadena cinemática), y se obtiene mediante los siguientes pasos:
Obtener los Parámetros Denavit-Hartenberg correspondientes a la cadena
cinemática propuesta.
Sustituir los parámetros correspondientes del eslabón i en la matriz de
transformación Ti, que es la matriz de transformación base.
Realizar el producto para obtener la matriz de transformación , la
cual contiene el vector de posición del efector final.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
101
iii. Desempeño cinemático
El desempeño cinemático consiste en evaluar en las ecuaciones del MCDP el
desempeño articular de cada grado de libertad concerniente a la estructura ósea
caracterizada (definida en cada eje de giro por marco ortonormal), con el propósito de
conocer, durante el ciclo de marcha, la conducta en el espacio cartesiano y de algún
modo su relación con el entorno. De la misma manera es útil para la planificación de
movimiento del sistema robótico asistencial o de rehabilitación, bajo el principio de
contribuir en las evoluciones del paciente evitando al máximo un daño no deseado al
pretender superar los movimientos permisibles en el estado en el que se encuentre
dicho paciente durante el uso de ésta tecnología.
E. Diagnóstico.
El programa o procedimiento metodológico para evaluar el ciclo de marcha en
las personas con hemiplejia, está encaminado principalmente para conocer las
capacidades físicas, la formación y reeducación de las habilidades motrices para
caminar de acuerdo la biomecánica normal humana.
El ciclo de la marcha de una persona hemipléjica, se puede describir a través de
observaciones de las actitudes posturales corporales, y de los movimientos durante la
locomoción y clínicamente los beneficios serían:
1) Clarificar los tipos y grados de anormalidad de la marcha.
2) Prevenir o minimizar dichos trastornos.
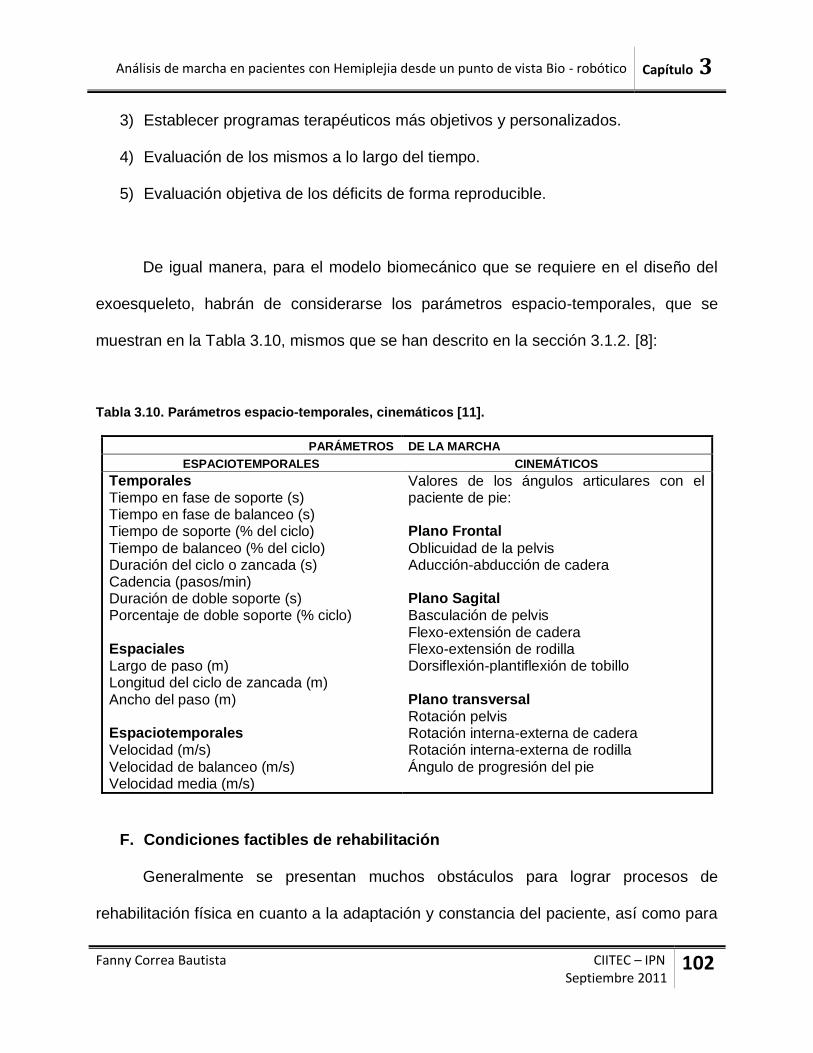
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
102
3) Establecer programas terapéuticos más objetivos y personalizados.
4) Evaluación de los mismos a lo largo del tiempo.
5) Evaluación objetiva de los déficits de forma reproducible.
De igual manera, para el modelo biomecánico que se requiere en el diseño del
exoesqueleto, habrán de considerarse los parámetros espacio-temporales, que se
muestran en la Tabla 3.10, mismos que se han descrito en la sección 3.1.2. [8]:
Tabla 3.10. Parámetros espacio-temporales, cinemáticos [11].
PARÁMETROS DE LA MARCHA
ESPACIOTEMPORALES CINEMÁTICOS
Temporales Tiempo en fase de soporte (s) Tiempo en fase de balanceo (s) Tiempo de soporte (% del ciclo) Tiempo de balanceo (% del ciclo) Duración del ciclo o zancada (s) Cadencia (pasos/min) Duración de doble soporte (s) Porcentaje de doble soporte (% ciclo) Espaciales Largo de paso (m) Longitud del ciclo de zancada (m) Ancho del paso (m) Espaciotemporales Velocidad (m/s) Velocidad de balanceo (m/s) Velocidad media (m/s)
Valores de los ángulos articulares con el paciente de pie: Plano Frontal
Oblicuidad de la pelvis Aducción-abducción de cadera Plano Sagital Basculación de pelvis Flexo-extensión de cadera Flexo-extensión de rodilla Dorsiflexión-plantiflexión de tobillo Plano transversal Rotación pelvis Rotación interna-externa de cadera Rotación interna-externa de rodilla Ángulo de progresión del pie
F. Condiciones factibles de rehabilitación
Generalmente se presentan muchos obstáculos para lograr procesos de
rehabilitación física en cuanto a la adaptación y constancia del paciente, así como para
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
103
establecer un diagnóstico claro frente al ciclo de marcha y recuperación de la misma.
En ésta sección, del esquema propuesto, se propone la metodología para la evaluación
de la marcha, con base en un modelo de control y aprendizaje, medido a través de un
sistema de análisis de movimiento.
Así, la estrategia que permite hacer un diagnóstico eficaz y un adecuado
seguimiento de los logros de recuperación de los pacientes es la evaluación de las
características de base y de recuperación de los pacientes. Aprovechando la
posibilidad de hacer mediciones cuantitativas gracias al desarrollo y a la tecnología en
áreas como la informática, la biomecánica y la videogametría se desarrolla un sistema
de evaluación del movimiento de la marcha bípeda. Lo que permite plantear
diagnósticos más asertivos, pronósticos adecuados y hacer seguimientos de la
recuperación de manera más confiable [15].
Un principio de rehabilitación propuesto en ésta sección es definido a
continuación:
a) A partir de la caracterización del ciclo de marcha, la emisión de gráficas de
desempeño articular, y el correspondiente análisis de marcha; se define un
diagnóstico clínico que describe las limitaciones de movimiento articular o
bajo factor de forma en alguna o algunas estructuras óseas, todo ello con
relación a un ciclo de marcha normal.
b) Diseñar la planificación de movimientos requeridos para la tarea de
fisioterapia, y terapia ocupacional, de manera tal que el paciente pueda
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
104
emprender la tarea de corrección sin riesgo de daños físicos adicionales o
fatiga del sistema musculo-esquelético.
c) Selección de la tecnología para asistencia médica o corrección
(rehabilitación), como dispositivos robóticos y equipo de instrumentación en
tiempo real. En ésta sección se propone el uso de dispositivos robóticos tipo
exoesqueleto, cuyas técnicas de control de movimiento y fuerza emplean la
planificación de fisioterapia y terapia ocupacional.
d) La caracterización de movimiento de manera periódica es relavante para
definir el avance o mejora del paciente.
3.5. Conclusiones
En éste capítulo de se dio a conocer, fundamentado en procedimientos y
literatura actualizada, una propuesta para el análisis de marcha en pacientes con
hemiplejia como consecuencia de un accidente cerebro-vascular (EVC). Como parte de
la base del procedimiento se especificaron aspectos relevantes del ciclo de marcha
basados en la biomecánica normal y las fases que lo componen. Se describe la
nomenclatura y concepción empleada en ésta tesis, particularmente en el capítulo 4 de
resultados experimentales y evaluación, como los planos anatómicos de análisis
(transversal, sagital y coronal), y las estructuras óseas de análisis como pelvis, cadera,
rodilla y tobillo para ambas extremidades, así como los marcos ortonormales
constituidos por los ejes de giro, y las fases de oscilación y apoyo. Se presentó la
cinemática articular y los límites biomecánicos para las condiciones de marcha normal,
de manera tal que sean empleadas como base para describir las condiciones de un
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
105
paciente. La sección que se considera más relevante corresponde a la propuesta
metodológica para evaluación de marcha, descrita explícitamente por un diagrama de
bloques y flujo de señales, se realiza la descripción de cada componentes definido
como subsistema del procedimiento (bloques principales), constituidos como: la
selección de pacientes, la caracterización del ciclo de marcha, el análisis de marcha, al
cinemática de marcha bípeda, el diagnóstico y las condiciones de rehabilitación. Éste
capítulo se presenta como la base teórica para fundamentar y organizar el trabajo de
campo o experimental reportado en el siguiente capítulo.
3.6. Referencias
[1]. Beseler, Ma. Rosario. Estudio de los parámetros cinéticos de la marcha del
paciente hemipléjico mediante plataformas dinamométricas. Universidad de
Valencia, 2006.
[2]. J. Moreno, F. Brunetti, R.Ceres. "Una aproximación a la compensación y
valoración funcional de marcha humana". Instituto de Automática Industrial.
Consejo Superior de Investigaciones Científicas. Madrid
[3]. C. Vaughan, B. Davis and J. O’Connor. Dinamics of Human Gait. Second
Edition. Cape Town, South Africa, 1999.
[4]. Fitzgerald, Kaufer y Makan. “Ortopedia”. Tomo I. Editorial Panamericana.
Argentina, 2004.
[5]. Perry, J. Gait analysis, normal and pathological function. SLACK Incorporated.
USA, 1992.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
106
[6]. Claudio H. Toboadela. "Goniometría. Una herramienta para la evaluación de las
incapacidades laborales". 1a. Ed. Argentina, 2007.
[7]. Villa, Adriana, Gutiérrez, Eduardo, Pérez, J. Carlos. Consideraciones para el
análisis de la marcha humana. Técnicas de videogrametría, electromiografía y
dinamometría. Revista Ingeniería Biomédica. Vol. 2, Num. 5. Enero-Junio 2008.
[8]. Chester, Victoria, Tingley, Maureen and Biden, Edmund. Comparison of two
normative pediatric gait databases. Dinamic Medicine. Published July 2007.
[9]. T N Brown, R M Palmieri-Smith, S G McLean. “Sex and limb differences in hip and
knee kinematics and kinetics during anticipated and unanticipated jump landings:
implications for anterior cruciate ligament injury”. Br J Sports Med 2009;43:1049-
1056 doi:10.1136/bjsm.2008.055954.
[10]. Villalobos, Jorge, Parodi, Alejandro. Estandarización de los valores cinemáticos
en niños sanos. Revista Mexicana de Medicina Física y Rehabilitación. Vol. 17,
Num. 2. Abril - Junio 2005.
[11]. Villa, Adriana, Gutiérrez, Eduardo, Pérez, J. Carlos. Consideraciones para el
análisis de la marcha humana. Técnicas de videogrametría, electromiografía y
dinamometría. Revista Ingeniería Biomédica. Vol. 2, Num. 5. Enero-Junio 2008.
[13]. Díaz, Carlos, López, Nivardo. Evaluación Preliminar de la marcha en individuos
sanos. Universidad, Ciencia y Tecnología. Vol. 11, Num. 44. Septiembre 2007.
[14]. Dankloff, Rodríguez, Fernández. Estudio morfofuncional de la marcha humana.
Facultad de Medicina. Universidad de Alcalá Henares.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
107
[15]. Hincapie G, D. Muñoz R. “Análisis cinemático en la rehabilitación de la marcha
de la marcha del paciente con amputación BK”. Universidad Maunela Beltrán.
Colombia, 2007.
Referencias consultadas y no citadas.
[16]. Aaron M. Dollar y Hug Herr. Active Orthoses for the Lower-Limbs: Challenges
and State of the Art. Proceedings of the 2007 IEEE 10th International
Conference on Rehabilitation Robotics, June 12-15, Noordwijk, Netherlands.
[17]. Broseta, Bertomeu. Contribución del análisis cinético de la marcha a la
valoración de los trastornos del equilibrio. Revista de Biomecánica del Instituto
de Biomecánica de Valencia. 2005
[18]. Davis, Ounpuu, Tyburski and Gage. A gait analysis data collection and reduction
thechnique. Human Movement Science. Vol 10, Octubre1991. Pp 575-587 USA
[19]. Sinikka H. Peurala. Rehabilitation of Gait in Chronic Stroke Patients. Department
of Neurology Series of Reports No. 74, 2005. University of Kuopio 2005
[20]. Urdaniz, Ortiz, Bonardi y Gentiletti. Diseño y Simulación de una Órtesis Robótica
para Rehabilitación de la Marcha. Universidad Nacional de Entre Rios.
Argentina, 2007.
[21]. Gallego, Cordero, Moreno, Turowska. Síntesis de la marcha robótica mediante la
aproximación del ciclo límite: El robot bípedo ESBiRRo. Grupo de Bioingeniería
– Consejo Superior de Investigaciones Científicas (CSIC). España, 2008
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 3
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
108
[22]. López, J. María y Covisa Terradas. Alteraciones de la marcha. Hospital
Universitario Infantil Niño Jesús. Madrid, 2008.
[23]. Borgues, José. Ayudas técnicas para la marcha. Fichas de Ortopedia OFFARM.
Vol. 25, Num. 11. Diciembre 2006.
[24]. Hesse, Cordula, Bardeleben and Hugues. Body Weigth-Supported Treadmill
Training after Stroke. Current Atherosclerosis Reports 2001, 3.
[25]. Pizzi, Carlucci, Falsini, Lunghi. Gait in Hemiplegia: Evaluation of clinical features
with the wisconsin gait scale. Journal Rehabilitation Medical 2007, 39.
[26]. Marco Sanz, Carmen. Marcha Patológica. Revista del pie y tobillo. Tomo XVII,
Num. 1, Octubre 2003.
[27]. Lidia, Fumiy, Rummel, Jügen, Seyfarth André. Bipedal walking and running with
spring-lije biarticular muscles. Journal of Biomechanics 41, 2008.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
109
Capítulo 4 Resultados del análisis del proceso de marcha
4.1 Introducción
En este capítulo se presentan los resultados experimentales correspondientes al
análisis de marcha de acuerdo al procedimiento descrito por el diagrama de la Figura
3.9, así como la descripción de la plataforma de evaluación empleada para la
caracterización del ciclo y fases de marcha en 8 sujetos de estudio: 3 personas que se
asumen en condiciones normales (sanos), y 5 personas con dictamen clínico de
hemiplejia y condiciones de inclusión; para ello se dan a conocer las características
antropométricas de los sujetos de estudio y la caracterización de marcha con base en
gráficos descriptivos del factor de forma (morfología) de las señales articulares para
flexo-extensión (pelvis, cadera, rodilla y tobillo), rotación (pelvis, cadera y rodilla),
progresión del pie, oblicuidad de pelvis, aducción-abducción de cadera, varo-valgo de
rodilla, parámetros espacio-temporales del ciclo y fases de caminata; todo ello referido
a los planos coronal, sagital y transversal. Las gráficas de desempeño en el ciclo de
marcha son discutidas de acuerdo a una biomecánica de marcha normal y la
corroboración del desempeño de las personas que se asumen como sanas, es
importante hacer notar que de acuerdo al análisis de marcha discutido con ayuda de
las gráficas de barras que describen el desempeño para cada estructura ósea con
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
110
relación a los planos anatómicos, se describen las limitaciones de movimiento para
cada paciente y se proponen los criterios de valoración clínica.
4.2 Descripción de la plataforma experimental
El estudio experimental de la cinemática del ciclo de marcha en personas con
hemiplejia y personas sanas, se realizó en el Laboratorio de análisis de movimiento del
Centro de Rehabilitación Infantil Teletón (CRIT), del Estado de México. Éste laboratorio
cuenta con un equipo BTS® Italia, seis cámaras infrarrojas, frecuencia de muestreo de
100Hz, Software GaitEliClinic® 2.9.2, dos cámaras digitales Pentax® para grabación en
tiempo real y software Matrox PC-VCR® (ver complementos en Apéndice E).
La selección de personas para realizar análisis de marcha, así como el registro
de datos personales y clínicos se llevó a cabo en el área de rehabilitación física dentro
de las instalaciones del Hospital Juárez de México y la Unidad de Medicina Física
(Región Centro) respectivamente. Se seleccionaron a 5 personas con hemiplejia sin
considerar el lado de afección, que por razones de logística no fue posible contemplar a
un número mayor. Las personas que participaron en el estudio experimental, con un
ciclo de marcha normal (personas que se asumen clínicamente sanas) fueron
estudiantes del Centro de Investigación e Innovación Tecnológica, del Instituto
Politécnico Nacional. En ambos casos, tanto personas sanas como pacientes (con
Hemiplejia) firmaron un consentimiento informado de participación y autorización de la
divulgación de resultados con fines de investigación científica (ver Apéndice C).
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
111
4.3 Descripción de sujetos de evaluación
Dada la selección de pacientes, a partir de los criterios clínicos de inclusión, se
procedió a efectuar las mediciones antropométricas de peso, talla, ancho y altura
pélvica, rodilla y tobillo; así como la edad. 3 personas que se asumen sanas, son
seleccionadas con propósitos de estudio comparativo; se presenta una fotografía
representativa de uno de los momentos de la evaluación de marcha.
Para las mediciones, fueron empleados dispositivos como: balanza de pie,
estadiómetro, pelvímetro y cinta métrica. Para adquirir datos en el análisis de marcha
se colocaron los marcadores, con el propósito de detectar los puntos anatómicos (de
acuerdo a la Figura 3.9). Los marcadores fueron adheridos a la piel en puntos
anatómicos específicos, según el protocolo de Davis [7] [8].
Los puntos de referencia para la colocación de los marcadores fueron las
prominencias óseas, tales como el acromion, la espina iliaca antero-superior, el
trocánter mayor, el cóndilo femoral lateral, la cabeza del peroné, el maléolo lateral, la
cabeza del quinto metatarsiano, la primera vertebra sacra y los calcáneos (Ver Figura
3.9). También fueron empleados marcadores proyectados en barras para la mitad del
muslo derecho e izquierdo, así como en la mitad de la pierna derecha e izquierda, todo
ello para la detección con las cámaras infrarrojas.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
112
Persona sana 1
Fecha de nacimiento: 04/06/1984
Peso: 62 kg
Talla:1.70 m
Ancho pélvico: 20.5 cm
Altura pélvica: 8/8 cm
Rodilla: 10/10 cm
Tobillo: 6.5/6.5 cm
Persona sana 2
Fecha de nacimiento: 01/07/1985
Peso: 64 kg
Talla:1.90 m
Ancho pélvico: 18.5 cm
Altura pélvica: 8.3/8.3 cm
Rodilla: 9.5/9.5 cm
Tobillo: 6/6 cm
Persona sana 3
Fecha de nacimiento: 18/04/1985
Peso: 85 kg
Talla:1.72 m
Ancho pélvico: 18 cm
Altura pélvica: 10/10 cm
Rodilla: 10.5/10.5 cm
Tobillo: 6/6.5 cm
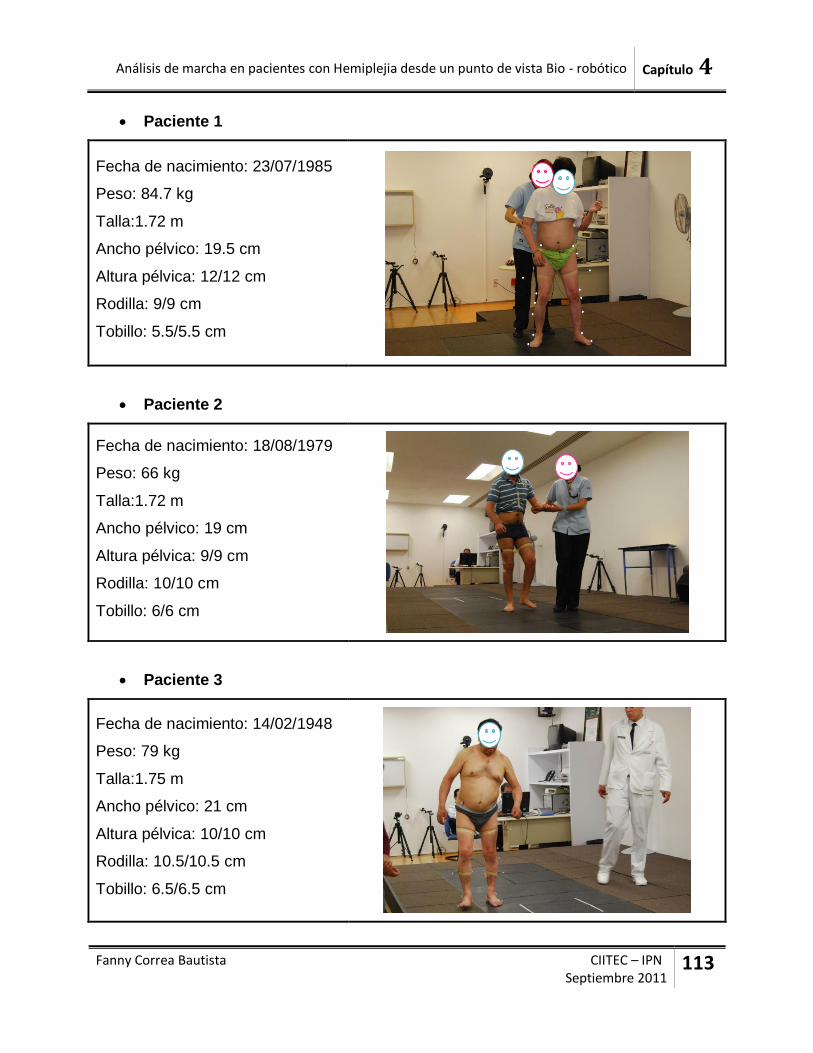
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
113
Paciente 1
Fecha de nacimiento: 23/07/1985
Peso: 84.7 kg
Talla:1.72 m
Ancho pélvico: 19.5 cm
Altura pélvica: 12/12 cm
Rodilla: 9/9 cm
Tobillo: 5.5/5.5 cm
Paciente 2
Fecha de nacimiento: 18/08/1979
Peso: 66 kg
Talla:1.72 m
Ancho pélvico: 19 cm
Altura pélvica: 9/9 cm
Rodilla: 10/10 cm
Tobillo: 6/6 cm
Paciente 3
Fecha de nacimiento: 14/02/1948
Peso: 79 kg
Talla:1.75 m
Ancho pélvico: 21 cm
Altura pélvica: 10/10 cm
Rodilla: 10.5/10.5 cm
Tobillo: 6.5/6.5 cm

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
114
Paciente 4
Fecha de nacimiento: 30/07/1955
Peso: 63 kg
Talla:1.57 m
Ancho pélvico: 21 cm
Altura pélvica: 10.5/10.5 cm
Rodilla: 9.5/9.5 cm
Tobillo: 6/6 cm
Paciente 5
Fecha de nacimiento: 04/04/1944
Peso: 96.8 kg
Talla:1.65 m
Ancho pélvico: 25 cm
Altura pélvica: 11/11 cm
Rodilla: 11/10.5 cm
Tobillo: 7/7 cm
4.4 Caracterización del ciclo de marcha
Una vez que el sujeto de estudio desarrolló el recorrido sobre la plataforma, y
fueron registrados los movimientos a través de las cámaras infrarrojas y los
marcadores situados estratégicamente de acuerdo al protocolo Davis, se proceso la
información adquirida con el software GaitEliClinic® 2.9.2 del equipo BTS® Italia
basada en los procedimientos descritos en las Figuras 3.14 y 3.15, y ecuaciones EC.
1, EC.2 y EC. 3 del capítulo 3, todo ello como parte de la caracterización de la marcha.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
115
4.5 Emisión de gráficas de desempeño
La emisión de gráficas de desempeño obtenidas para cada sujeto de estudio son
descritas con base en la morfología de las señales articulares para flexo-extensión
(pelvis, cadera, rodilla y tobillo), rotación (pelvis, cadera y rodilla), progresión del pie,
oblicuidad de pelvis, aducción-abducción de cadera, varo-valgo de rodilla, parámetros
espacio-temporales del ciclo y fases de caminata; todo ello referido a los planos
coronal, sagital y transversal, para ambas extremidades. El conjunto de figuras
presentadas a continuación (Figura 4.1 a 4.32) consideran el desempeño de las 4
estructuras óseas de interés en una muestra de 8 sujetos de estudio, 3 personas que
se asumen sanas y 5 personas con diagnóstico de hemiplejia.
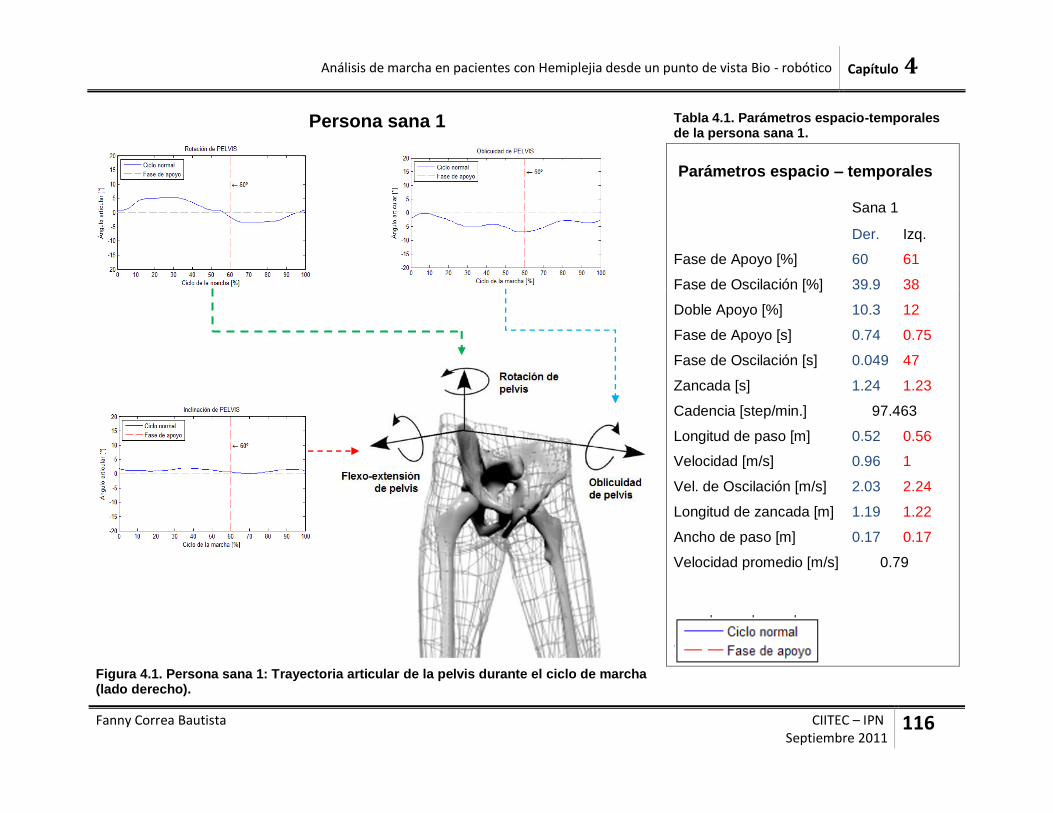
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
116
Persona sana 1 Tabla 4.1. Parámetros espacio-temporales de la persona sana 1.
Parámetros espacio – temporales Sana 1
Der. Izq.
Fase de Apoyo [%] 60 61
Fase de Oscilación [%] 39.9 38
Doble Apoyo [%] 10.3 12
Fase de Apoyo [s] 0.74 0.75
Fase de Oscilación [s] 0.049 47
Zancada [s] 1.24 1.23
Cadencia [step/min.] 97.463
Longitud de paso [m] 0.52 0.56
Velocidad [m/s] 0.96 1
Vel. de Oscilación [m/s] 2.03 2.24
Longitud de zancada [m] 1.19 1.22
Ancho de paso [m] 0.17 0.17
Velocidad promedio [m/s] 0.79
Figura 4.1. Persona sana 1: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).
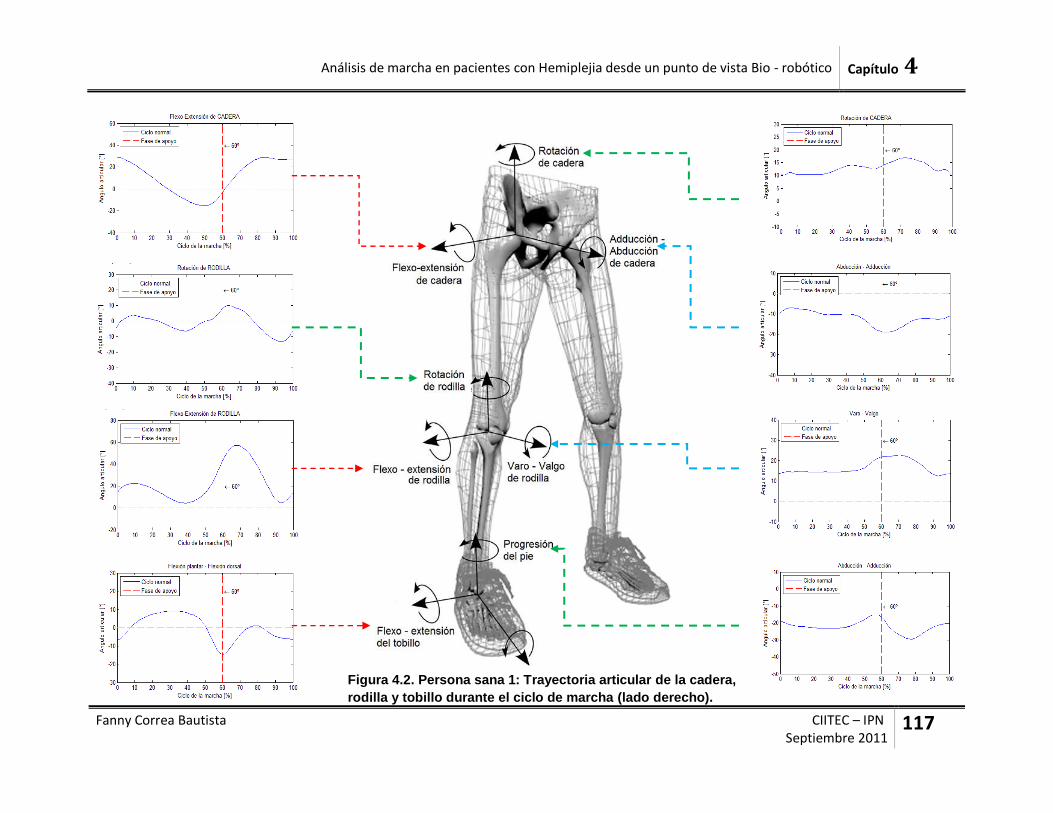
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
117
Figura 4.2. Persona sana 1: Trayectoria articular de la cadera,
rodilla y tobillo durante el ciclo de marcha (lado derecho).
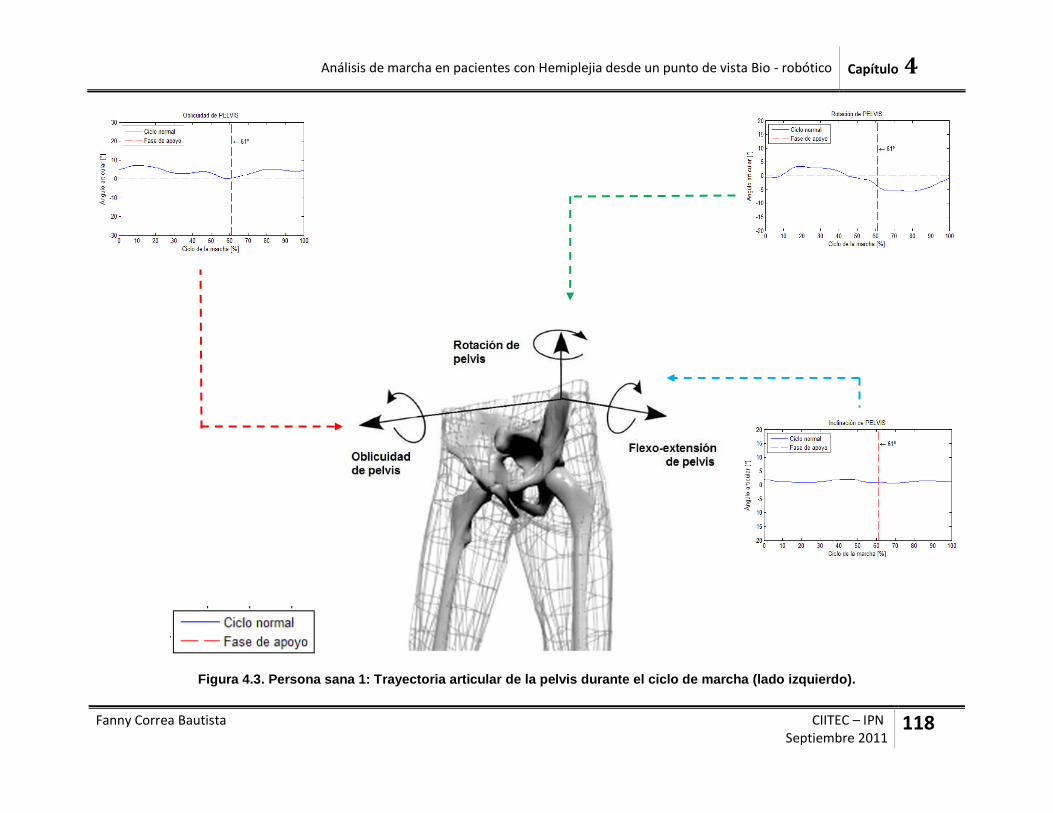
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
118
Figura 4.3. Persona sana 1: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).
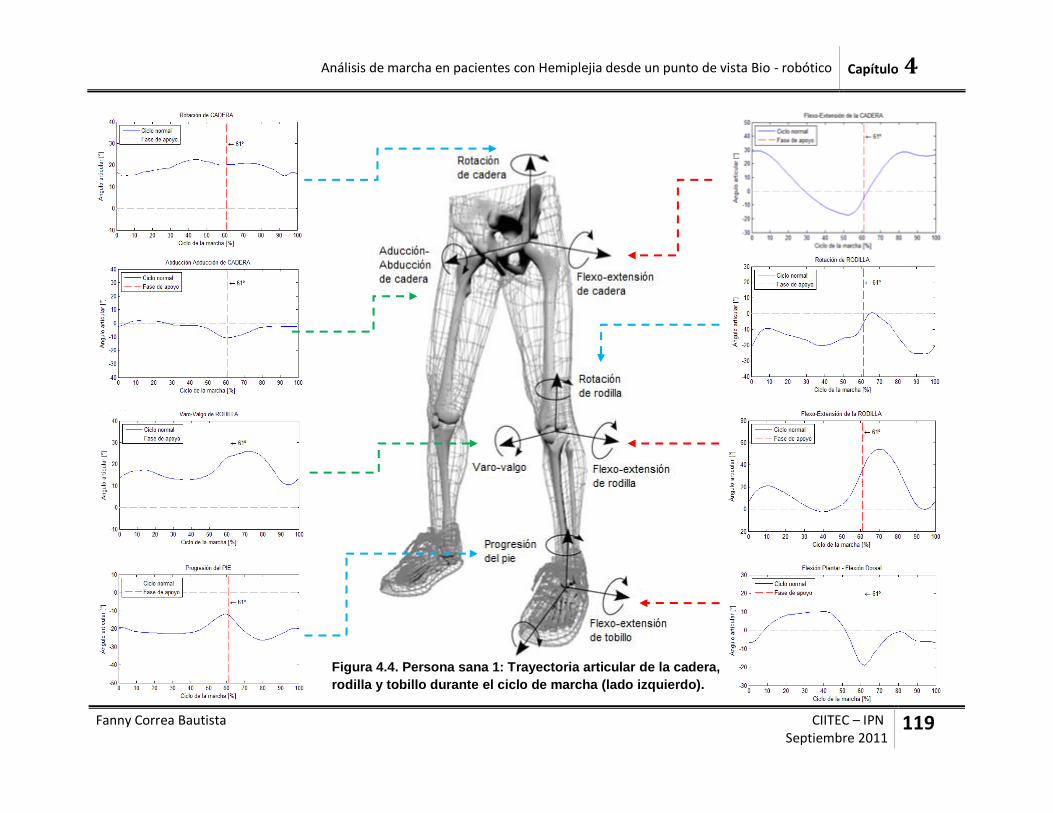
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
119
Figura 4.4. Persona sana 1: Trayectoria articular de la cadera,
rodilla y tobillo durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
120
Persona sana 2 Tabla 4.2. Parámetros espacio-temporales de la persona sana 2.
Parámetros espacio – temporales Sana 2
Der. Izq.
Fase de Apoyo [%] 64 62.6
Fase de Oscilación [%] 36.2 36.9
Doble Apoyo [%] 14.1 13.1
Fase de Apoyo [s] 0.86 0.84
Fase de Oscilación [s] 0.49 0.5
Zancada [s] 1.35 1.35
Cadencia [step/min.] 89.127
Longitud de paso [m] 0.51 0.48
Velocidad [m/s] 0.79 0.79
Vel. de Oscilación [m/s] 1.82 1.83
Longitud de zancada [m] 1.06 1.07
Ancho de paso [m] 0.21 0.21
Velocidad promedio [m/s] 0.66
Figura 4.5. Persona sana 2: Trayectoria articular de la cadera, rodilla y tobillo durante el ciclo de marcha (lado derecho).
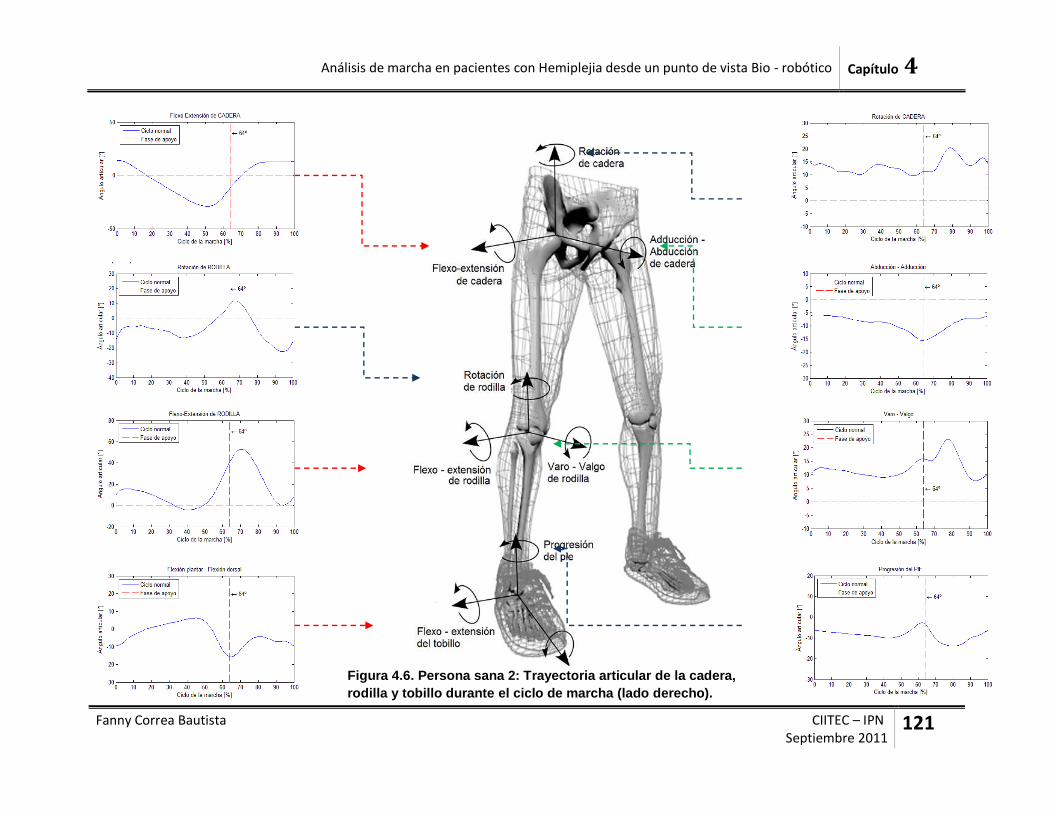
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
121
Figura 4.6. Persona sana 2: Trayectoria articular de la cadera,
rodilla y tobillo durante el ciclo de marcha (lado derecho).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
122
Figura 4.7. Persona sana 2: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).
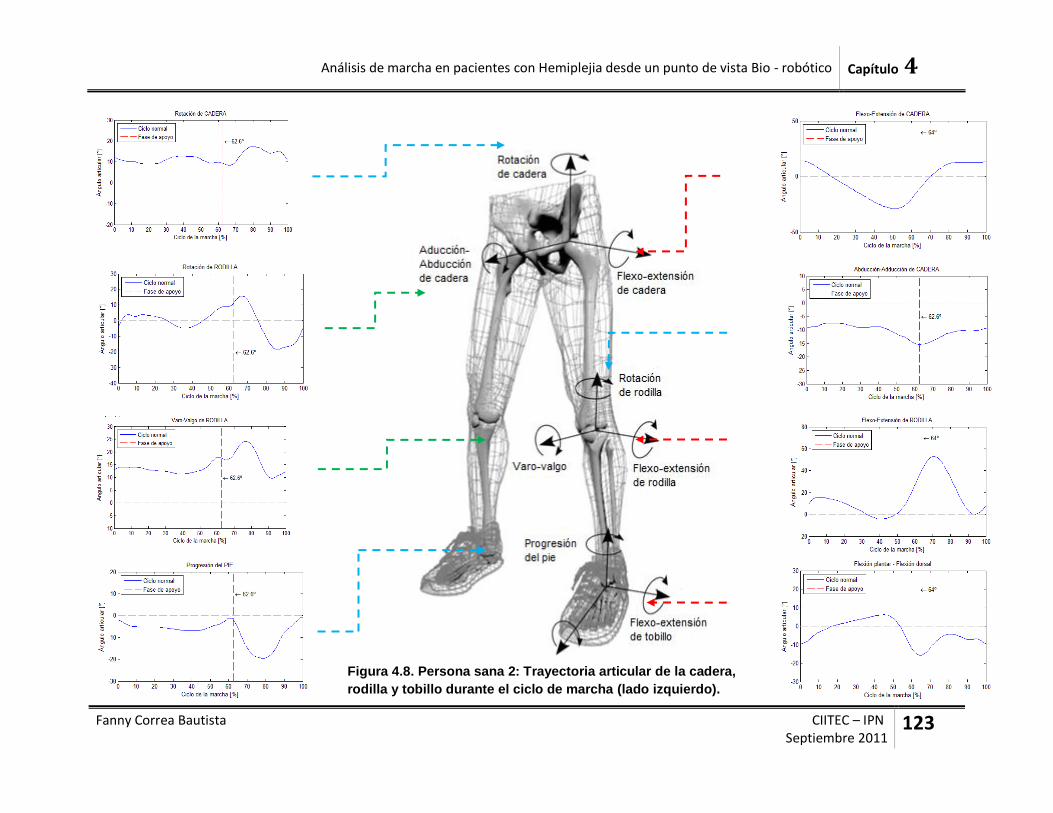
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
123
Figura 4.8. Persona sana 2: Trayectoria articular de la cadera,
rodilla y tobillo durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
124
Persona sana 3 Tabla 4.3. Parámetros espacio-temporales de la persona sana 3.
Parámetros espacio – temporales Der. Izq.
Fase de Apoyo [%] 60.2 59.4
Fase de Oscilación [%] 39.7 39.5
Doble Apoyo [%] 10.7 9.8
Fase de Apoyo [s] 0.69 0.69
Fase de Oscilación [s] 0.46 0.46
Zancada [s] 1.15 1.16
Cadencia [step/min.] 104.181
Longitud de paso [m] 0.58 0.57
Velocidad [m/s] 1.08 1.07
Vel. de Oscilación [m/s] 2.44 2.3
Longitud de zancada [m] 1.24 1.23
Ancho de paso [m] 0.22 0.22
Velocidad promedio [m/s] 0.98
Figura 4.9. Persona sana 3: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
125
Figura 4.10. Persona sana 3: Trayectoria articular de la cadera,
rodilla y tobillo durante el ciclo de marcha (lado derecho).
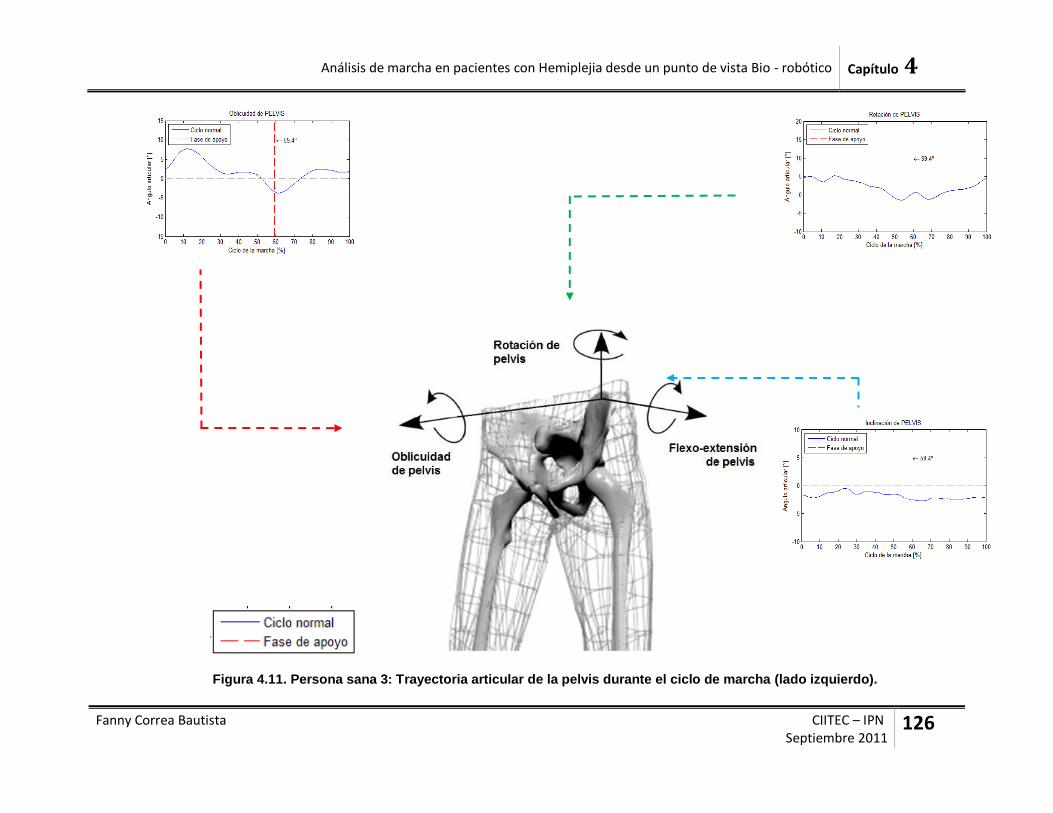
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
126
Figura 4.11. Persona sana 3: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).
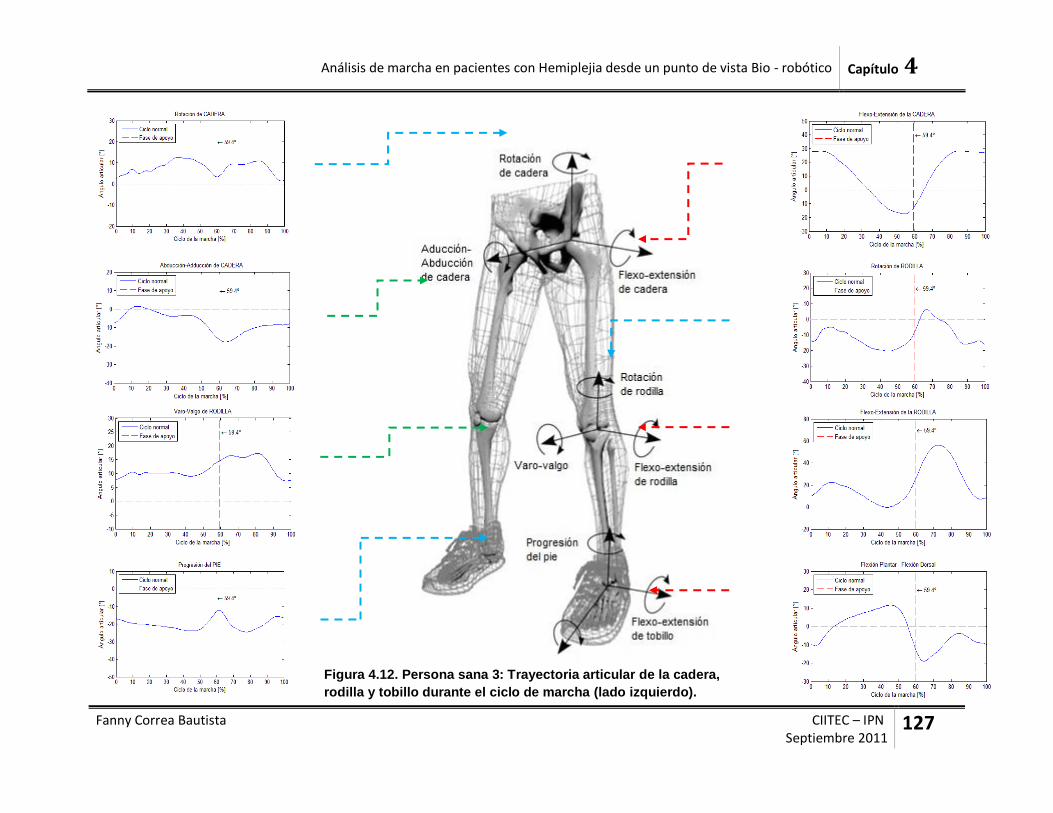
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
127
Figura 4.12. Persona sana 3: Trayectoria articular de la cadera,
rodilla y tobillo durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
128
Paciente 1 Tabla 4.4. Parámetros espacio-temporales del paciente 1.
Parámetros espacio – temporales Der. Izq.
Fase de Apoyo [%] 84.7 78.2
Fase de Oscilación [%] 18 20.5
Doble Apoyo [%] 29.4 33.7
Fase de Apoyo [s] 1.09 1.03
Fase de Oscilación [s] 0.23 0.27
Zancada [s] 1.29 1.31
Cadencia [step/min.] 92.557
Longitud de paso [m] 0.12 0.13
Velocidad [m/s] 0.22 0.21
Vel. de Oscilación [m/s] 1.04 0.57
Longitud de zancada [m] 0.28 0.26
Ancho de paso [m] 0.32 0.32
Velocidad promedio [m/s] 0.21
Figura 4.13. Paciente 1: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).
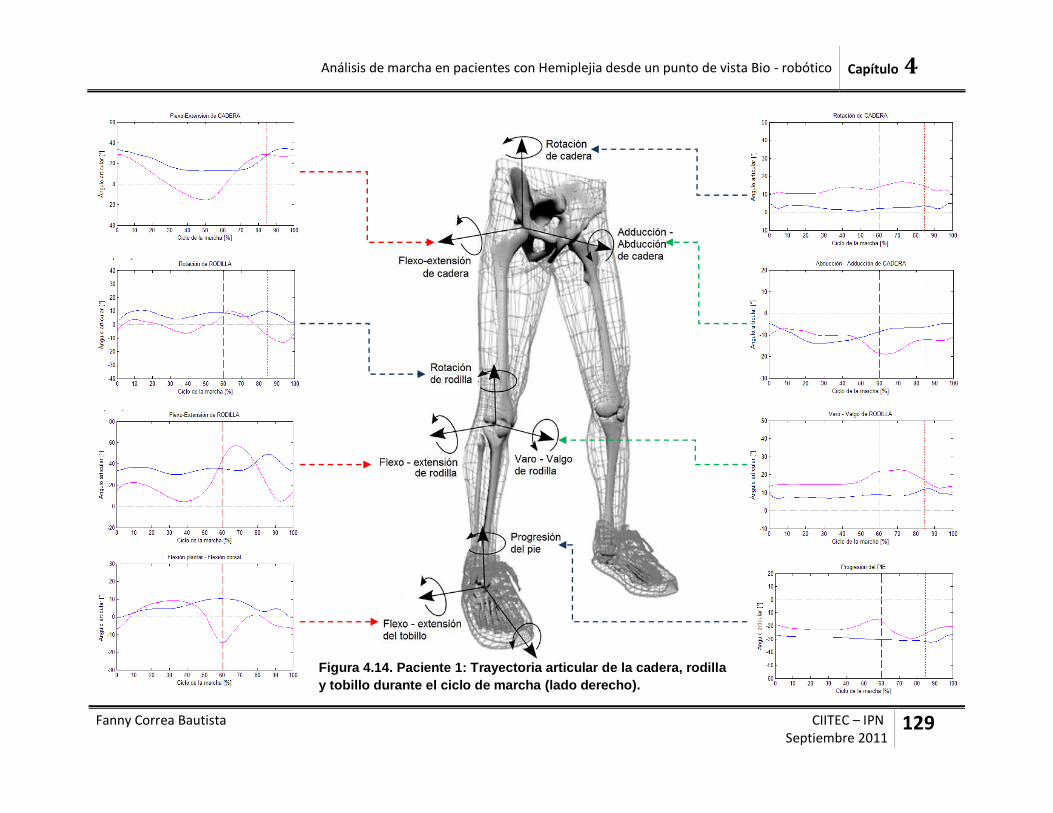
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
129
Figura 4.14. Paciente 1: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado derecho).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
130
Figura 4.15. Paciente 1: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
131
Figura 4.16. Paciente 1: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
132
Paciente 2
Tabla 4.5. Parámetros espacio-temporales del paciente 2.
Parámetros espacio – temporales Der. Izq.
Fase de Apoyo [%] 73.2 57.1
Fase de Oscilación [%] 26.8 43.1
Doble Apoyo [%] 12.8 17.3
Fase de Apoyo [s] 0.93 0.72
Fase de Oscilación [s] 0.34 0.55
Zancada [s] 1.27 1.27
Cadencia [step/min.] 94.772
Longitud de paso [m] 0.1 0.28
Velocidad [m/s] 0.3 0.31
Vel. de Oscilación [m/s] 0.97 0.64
Longitud de zancada [m] 0.38 0.39
Ancho de paso [m] 0.22 0.22
Velocidad promedio [m/s] 0.29
Figura 4.17. Paciente 2: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
133
Figura 4.18. Paciente 2: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado derecho).
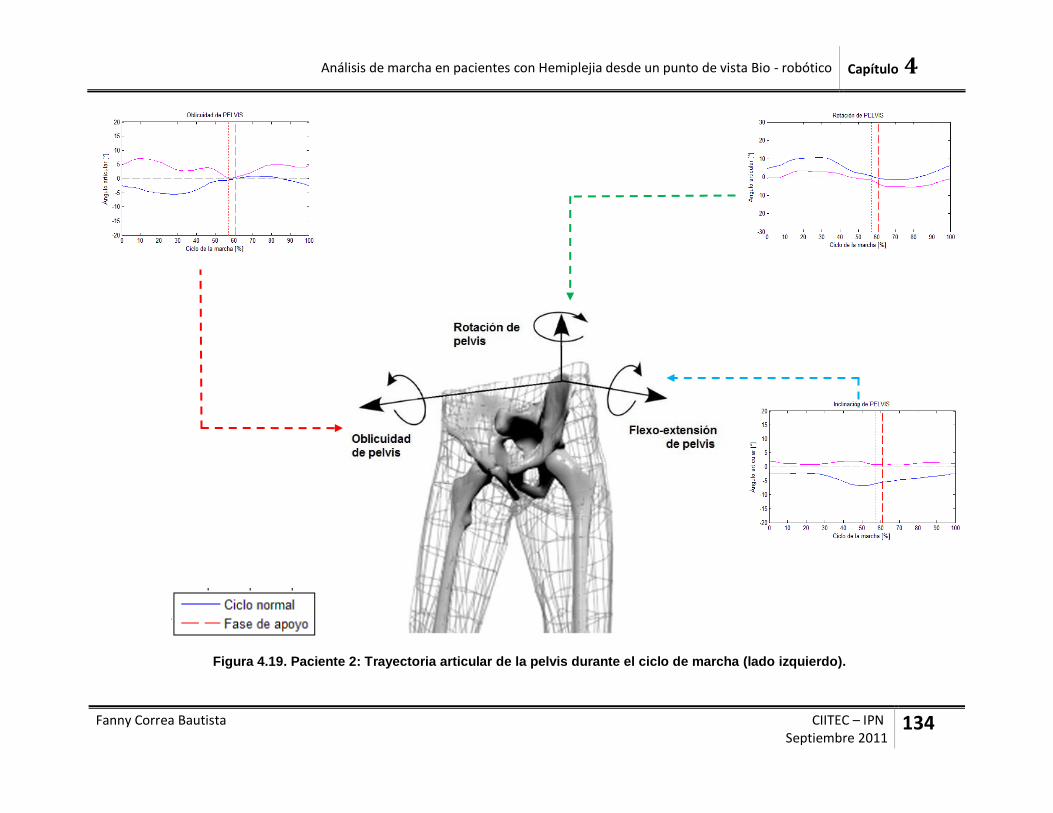
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
134
Figura 4.19. Paciente 2: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).
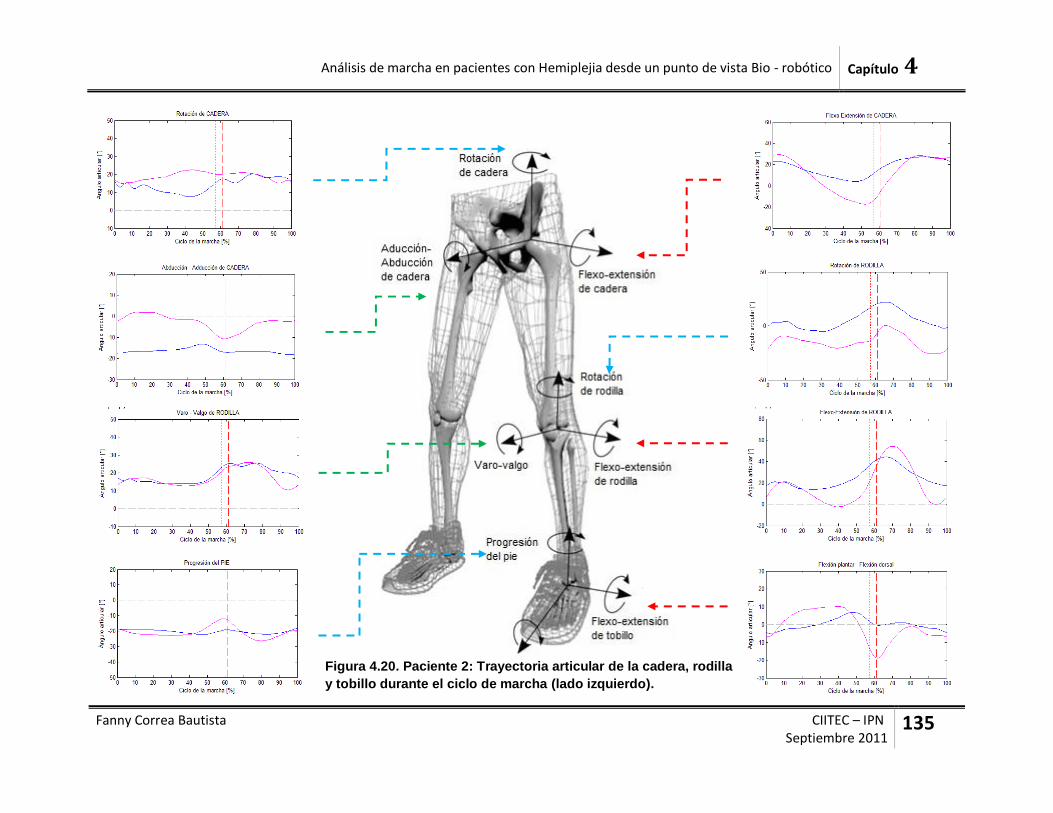
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
135
Figura 4.20. Paciente 2: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado izquierdo).
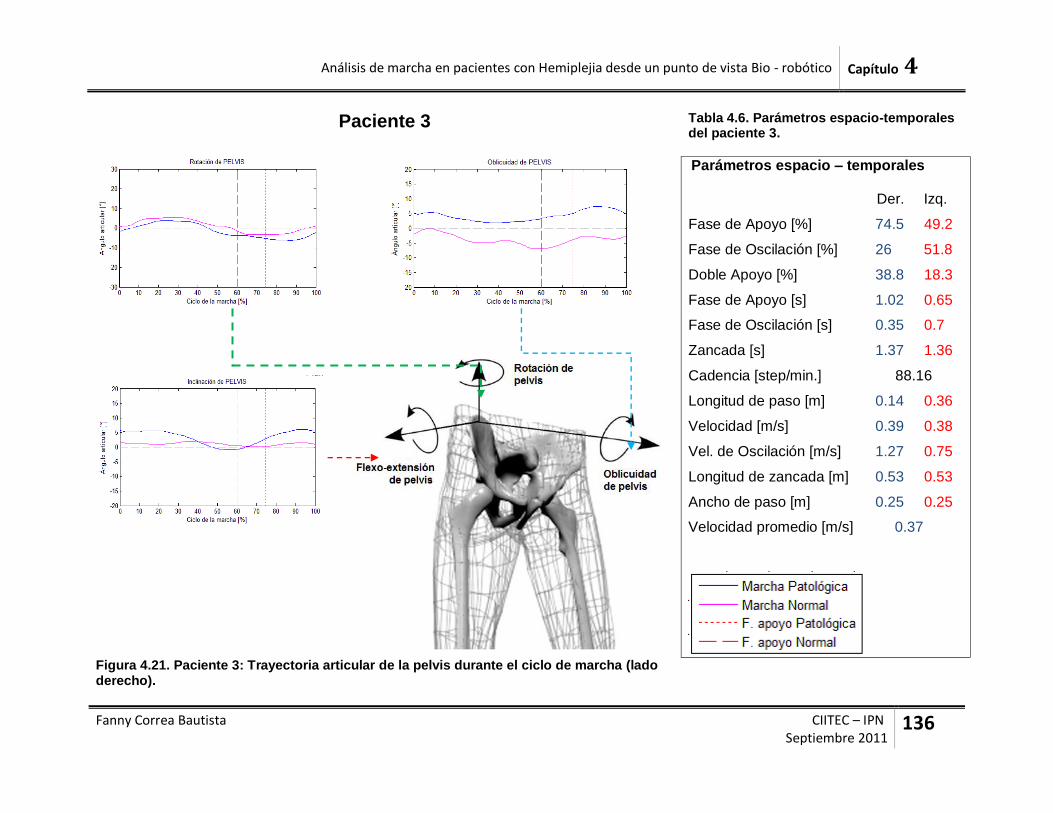
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
136
Paciente 3 Tabla 4.6. Parámetros espacio-temporales del paciente 3.
Parámetros espacio – temporales Der. Izq.
Fase de Apoyo [%] 74.5 49.2
Fase de Oscilación [%] 26 51.8
Doble Apoyo [%] 38.8 18.3
Fase de Apoyo [s] 1.02 0.65
Fase de Oscilación [s] 0.35 0.7
Zancada [s] 1.37 1.36
Cadencia [step/min.] 88.16
Longitud de paso [m] 0.14 0.36
Velocidad [m/s] 0.39 0.38
Vel. de Oscilación [m/s] 1.27 0.75
Longitud de zancada [m] 0.53 0.53
Ancho de paso [m] 0.25 0.25
Velocidad promedio [m/s] 0.37
Figura 4.21. Paciente 3: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).
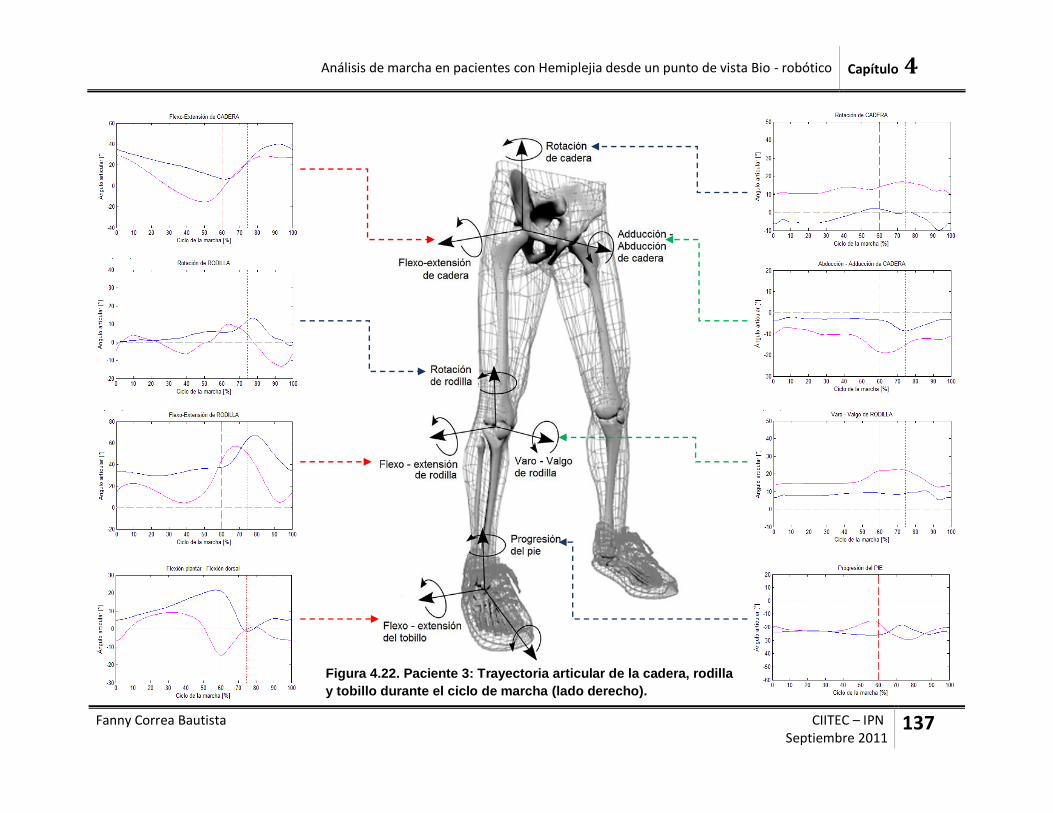
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
137
Figura 4.22. Paciente 3: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado derecho).
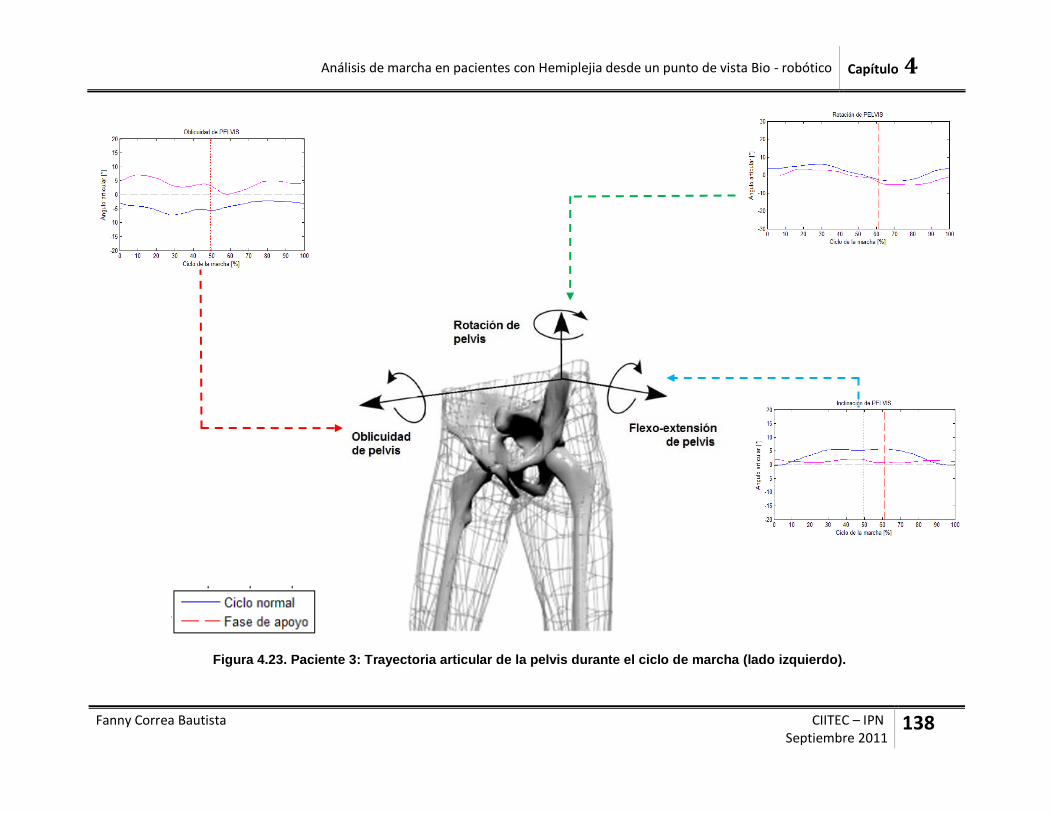
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
138
Figura 4.23. Paciente 3: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).
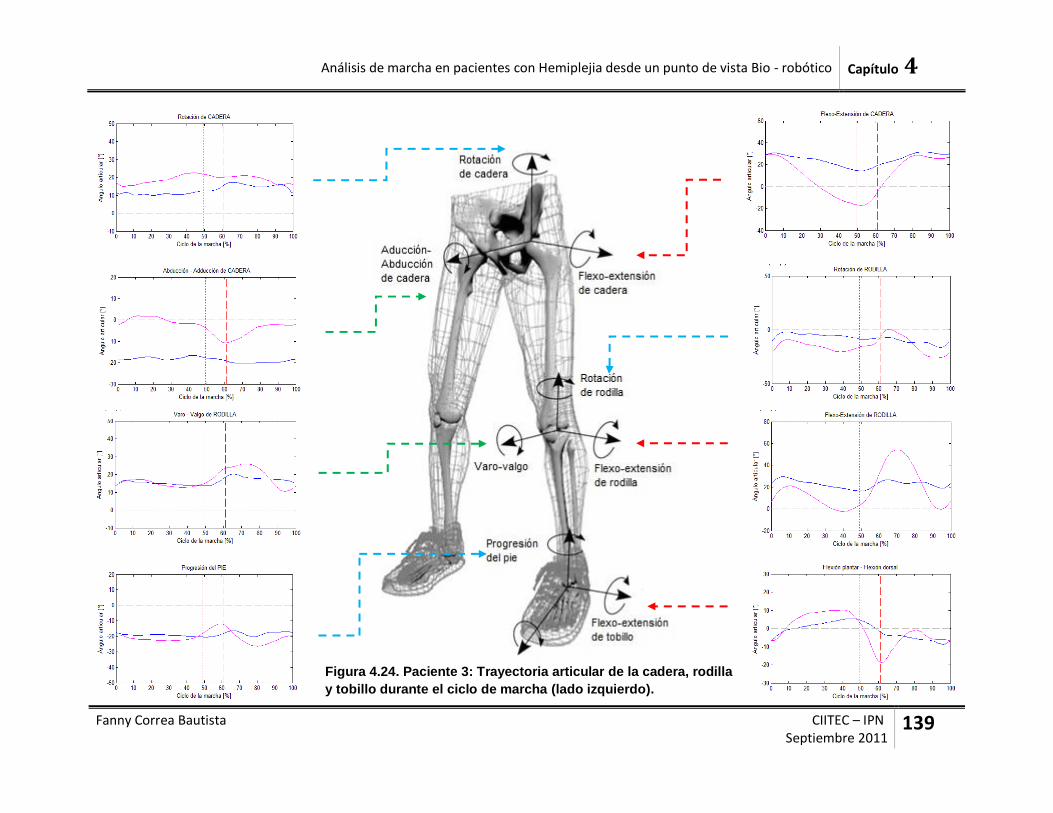
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
139
Figura 4.24. Paciente 3: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
140
Paciente 4: Tabla 4.7. Parámetros espacio-temporales del paciente 4.
Parámetros espacio – temporales Der. Izq.
Fase de Apoyo [%] 63.9 60.4
Fase de Oscilación [%] 35.6 40.1
Doble Apoyo [%] 14 10.9
Fase de Apoyo [s] 0.77 0.72
Fase de Oscilación [s] 0.42 0.48
Zancada [s] 1.19 1.19
Cadencia [step/min.] 101.05
Longitud de paso [m] 0.47 0.44
Velocidad [m/s] 0.83 0.84
Vel. de Oscilación [m/s] 1.94 1.89
Longitud de zancada [m] 0.98 0.99
Ancho de paso [m] 0.18 0.18
Velocidad promedio [m/s] 0.76
Figura 4.25. Paciente 4: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).
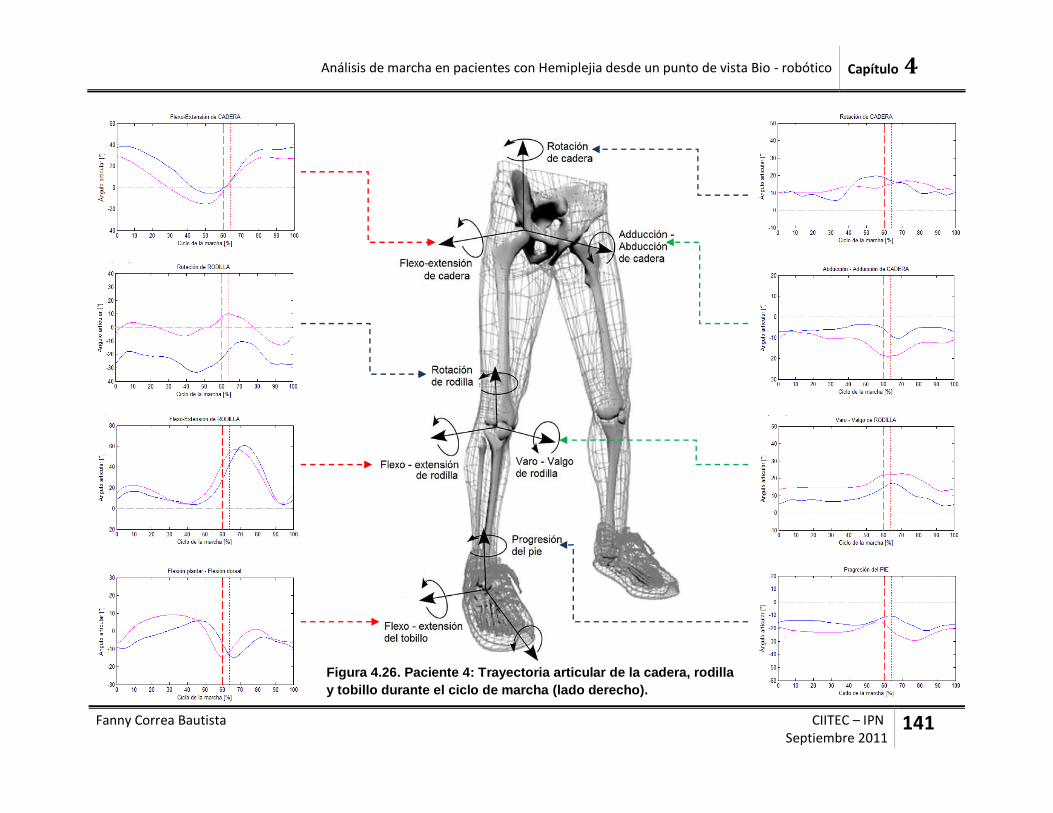
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
141
Figura 4.26. Paciente 4: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado derecho).
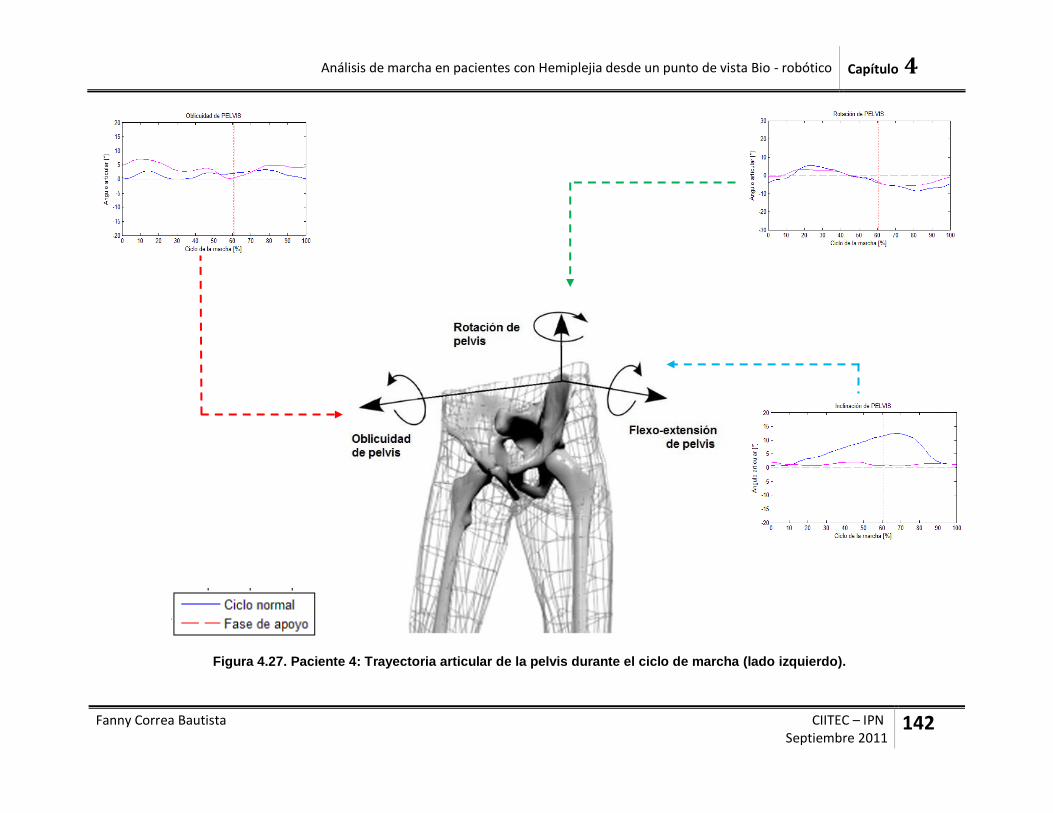
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
142
Figura 4.27. Paciente 4: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
143
Figura 4.28. Paciente 4: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado izquierdo).
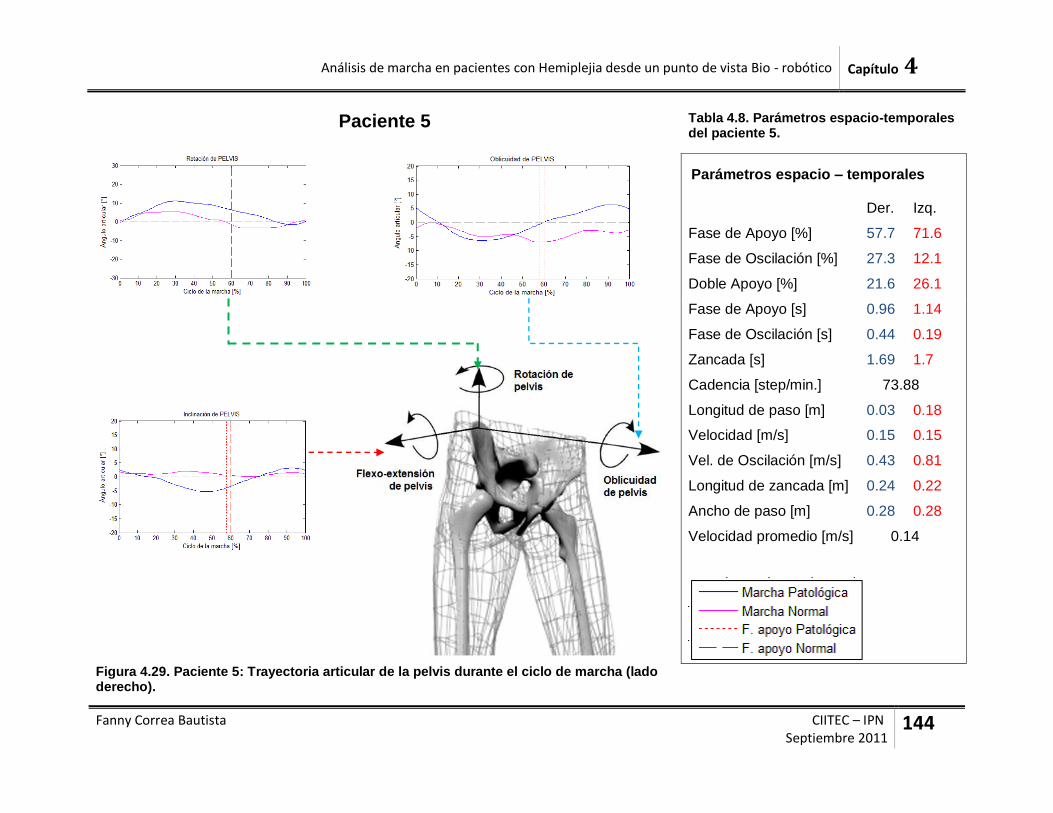
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
144
Paciente 5 Tabla 4.8. Parámetros espacio-temporales del paciente 5.
Parámetros espacio – temporales Der. Izq.
Fase de Apoyo [%] 57.7 71.6
Fase de Oscilación [%] 27.3 12.1
Doble Apoyo [%] 21.6 26.1
Fase de Apoyo [s] 0.96 1.14
Fase de Oscilación [s] 0.44 0.19
Zancada [s] 1.69 1.7
Cadencia [step/min.] 73.88
Longitud de paso [m] 0.03 0.18
Velocidad [m/s] 0.15 0.15
Vel. de Oscilación [m/s] 0.43 0.81
Longitud de zancada [m] 0.24 0.22
Ancho de paso [m] 0.28 0.28
Velocidad promedio [m/s] 0.14
Figura 4.29. Paciente 5: Trayectoria articular de la pelvis durante el ciclo de marcha (lado derecho).
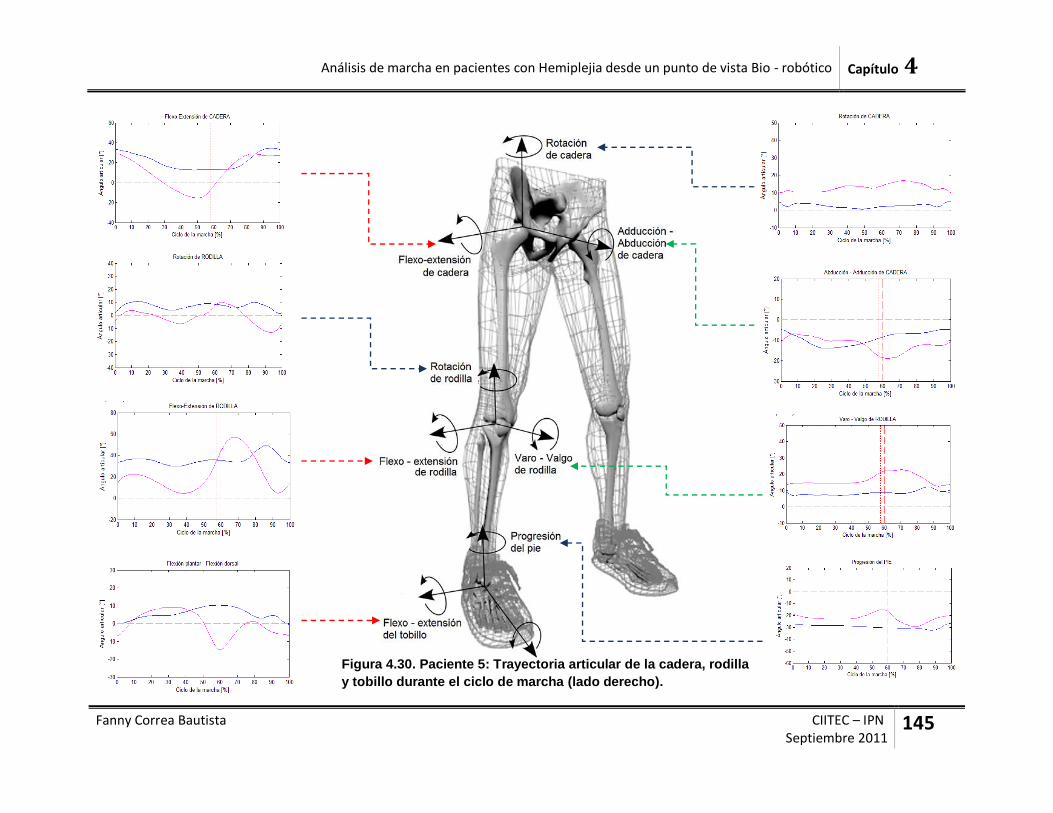
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
145
Figura 4.30. Paciente 5: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado derecho).
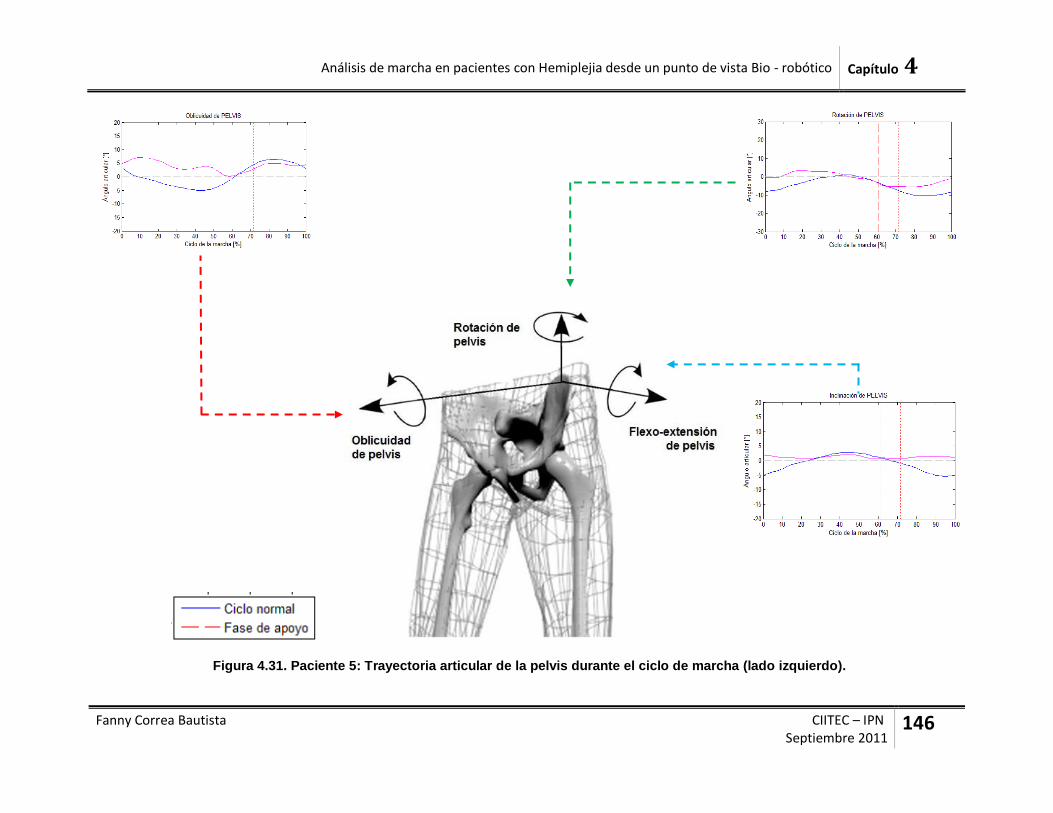
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
146
Figura 4.31. Paciente 5: Trayectoria articular de la pelvis durante el ciclo de marcha (lado izquierdo).
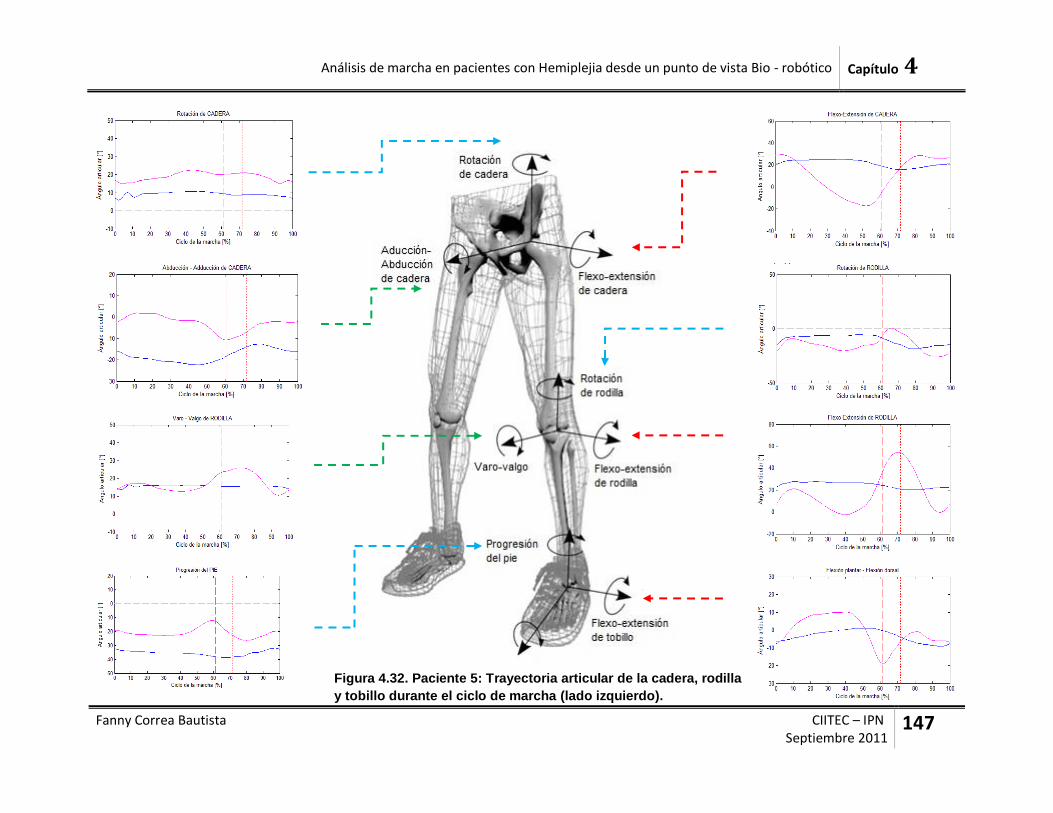
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
147
Figura 4.32. Paciente 5: Trayectoria articular de la cadera, rodilla
y tobillo durante el ciclo de marcha (lado izquierdo).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 148
Tabla 4.9. Rango de movilidad articular de la extremidad inferior derecha en los 3 planos.
Plano Coronal
Plano Sagital
Plano Transversal
Pe
rso
na
san
a 1
Pelvis
6.9
1.8
8.8
Cadera
11.9
44.2
7.10
Rodilla
10.2
52.6
23.3
Tobillo
23.9
14.3
Pe
rso
na
san
a 2
Pelvis
4.3
2.6
10.5
Cadera
9.7
43.2
10.8
Rodilla
15.4
57.100
34
Tobillo
22.100
11.2
Pe
rso
na
san
a 3
Pelvis
11.3
1.3
7.2
Cadera
21.8
46
12.7
Rodilla
7
58.10
32.10
Tobillo
30.5
13.7
Pe
rso
na
he
mip
léji
ca 1
Pelvis
12.7
8.5
12.7
Cadera
9.2
21.7
4.3
Rodilla
5.5
19.2
9.3
Tobillo
10.9
6
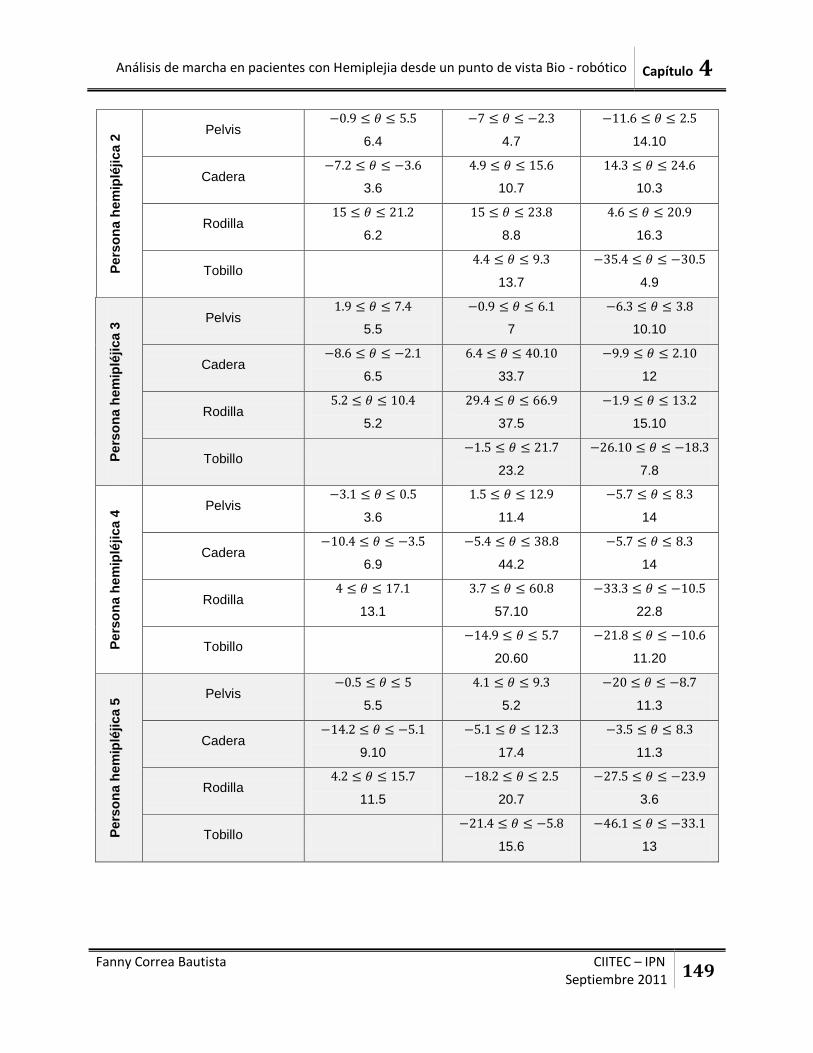
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 149
Pe
rso
na
he
mip
léji
ca 2
Pelvis
6.4
4.7
14.10
Cadera
3.6
10.7
10.3
Rodilla
6.2
8.8
16.3
Tobillo
13.7
4.9
Pe
rso
na
he
mip
léji
ca 3
Pelvis
5.5
7
10.10
Cadera
6.5
33.7
12
Rodilla
5.2
37.5
15.10
Tobillo
23.2
7.8
Pe
rso
na
he
mip
léji
ca 4
Pelvis
3.6
11.4
14
Cadera
6.9
44.2
14
Rodilla
13.1
57.10
22.8
Tobillo
20.60
11.20
Pe
rso
na
he
mip
léji
ca 5
Pelvis
5.5
5.2
11.3
Cadera
9.10
17.4
11.3
Rodilla
11.5
20.7
3.6
Tobillo
15.6
13
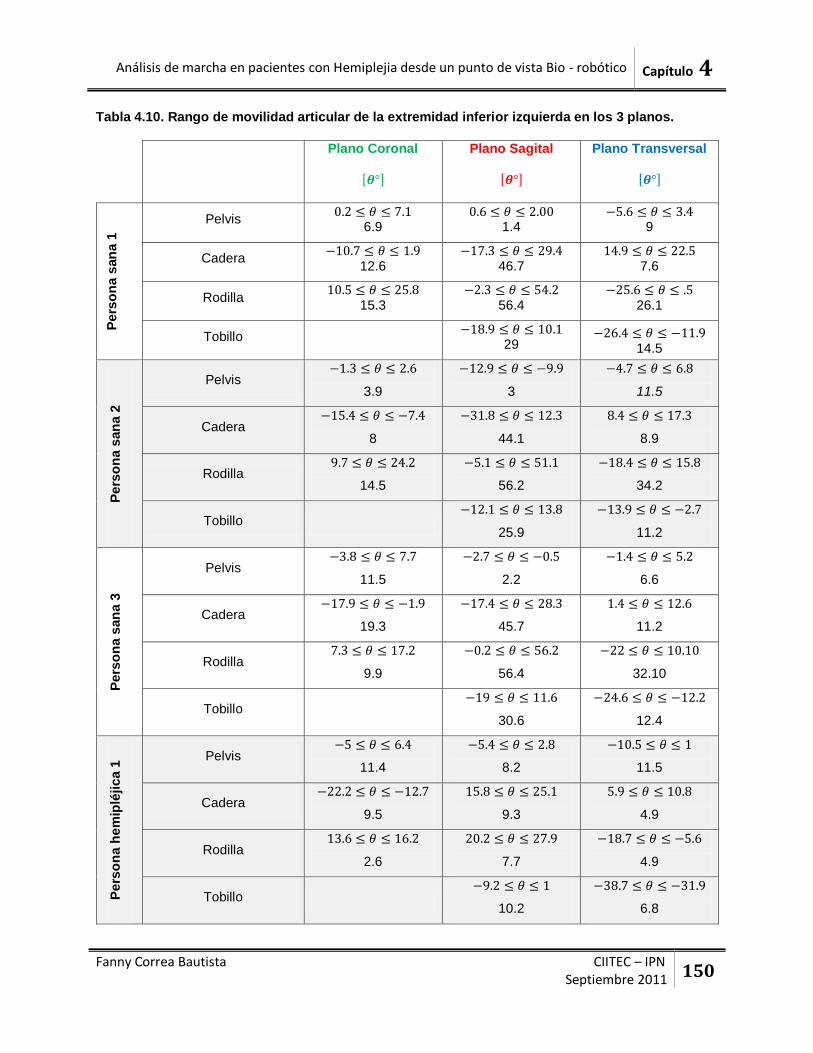
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 150
Tabla 4.10. Rango de movilidad articular de la extremidad inferior izquierda en los 3 planos.
Plano Coronal
Plano Sagital
Plano Transversal
Pe
rso
na
san
a 1
Pelvis
6.9
1.4
9
Cadera
12.6
46.7
7.6
Rodilla
15.3
56.4
26.1
Tobillo
29
14.5
Pe
rso
na
san
a 2
Pelvis
3.9
3
11.5
Cadera
8
44.1
8.9
Rodilla
14.5
56.2
34.2
Tobillo
25.9
11.2
Pe
rso
na
san
a 3
Pelvis
11.5
2.2
6.6
Cadera
19.3
45.7
11.2
Rodilla
9.9
56.4
32.10
Tobillo
30.6
12.4
Pe
rso
na
he
mip
léji
ca 1
Pelvis
11.4
8.2
11.5
Cadera
9.5
9.3
4.9
Rodilla
2.6
7.7
4.9
Tobillo
10.2
6.8
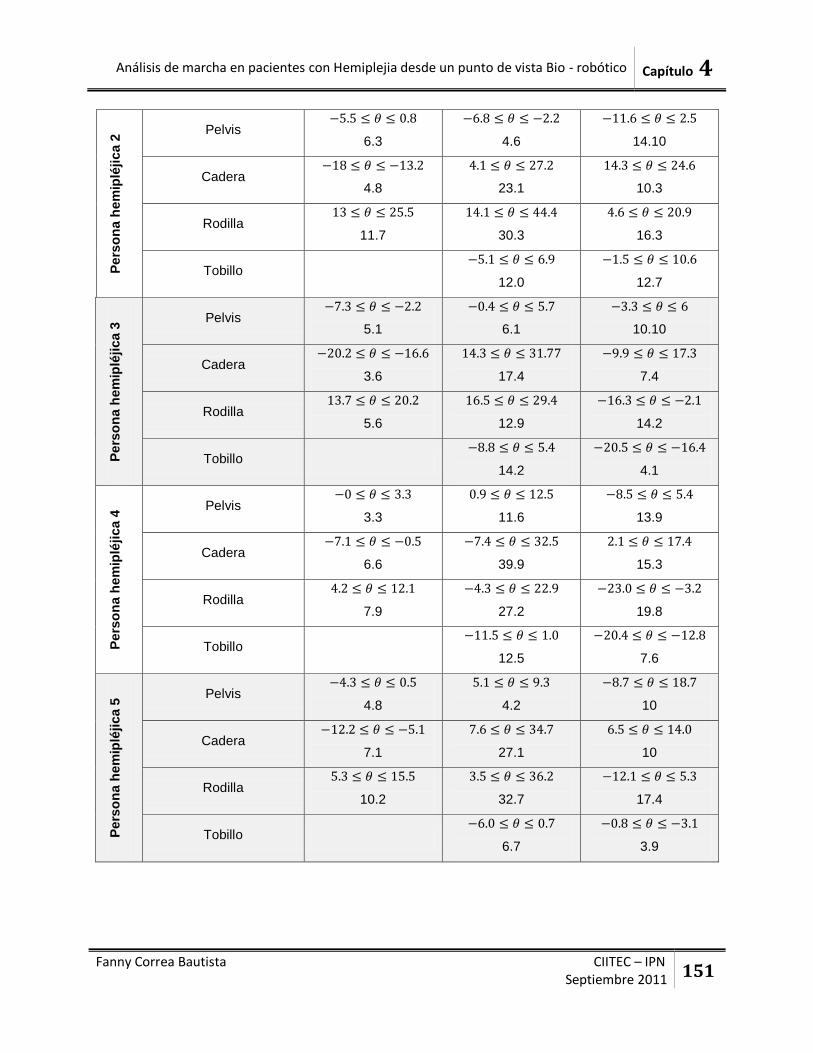
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 151
Pe
rso
na
he
mip
léji
ca 2
Pelvis
6.3
4.6
14.10
Cadera
4.8
23.1
10.3
Rodilla
11.7
30.3
16.3
Tobillo
12.0
12.7
Pe
rso
na
he
mip
léji
ca 3
Pelvis
5.1
6.1
10.10
Cadera
3.6
17.4
7.4
Rodilla
5.6
12.9
14.2
Tobillo
14.2
4.1
Pe
rso
na
he
mip
léji
ca 4
Pelvis
3.3
11.6
13.9
Cadera
6.6
39.9
15.3
Rodilla
7.9
27.2
19.8
Tobillo
12.5
7.6
Pe
rso
na
he
mip
léji
ca 5
Pelvis
4.8
4.2
10
Cadera
7.1
27.1
10
Rodilla
10.2
32.7
17.4
Tobillo
6.7
3.9

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 152
4.6 Análisis de la marcha en pelvis, cadera, rodilla y tobillo.
A partir de la emisión de gráficas de desempeño, descritas por las señales
articulares para cada eje del marco ortonormal referido a cada una de las estructuras
óseas de interés (pelvis, cadera, rodilla y tobillo), en este trabajo de investigación se
propone un análisis a partir de un estudio comparativo entre los sujetos de estudio y
considerando cada una de las estructuras óseas. Como herramienta auxiliar en el
análisis de la marcha para cada estructura ósea se desarrolló un programa en Matlab®
que determina los valores mínimo y máximo, y a partir de ello la amplitud angular,
obtenidas de la caracterización y que pueden ser corroboradas a través de las Figuras
4.1 a 4.32. La morfología de las señales es relevante, sin embargo, los datos emitidos y
descritos previamente serán empleados para dicho análisis. De estos datos se
obtuvieron gráficas de barras en ambas extremidades para todas las estructuras óseas
de interés en los tres planos anatómicos.
La Figura 4.33 permite visualizar la amplitud angular durante el ciclo de marcha,
para los 8 sujetos de estudio, de las estructuras óseas: pelvis, cadera y rodilla en el
plano coronal. En donde los tres primeros conjuntos de gráficas corresponden a
personas que se asumen sanas, y los 5 siguientes conjuntos de gráficas representan el
desempeño de pacientes con hemiplejia. De acuerdo a la gráfica se observa lo
siguiente:
a) La oblicuidad de la pelvis no permite verificar con certeza el estado clínico del
sujeto de estudio, ya que existe semejanza en ciertos comportamientos entre

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 153
personas sanas y pacientes (sano 1-paciente 2; sano 2-paciente 3 y paciente
5; sano 3-paciente 1).
b) La aducción-abducción de la cadera permite verificar el estado clínico del
sujeto de estudio a partir de la amplitud angular, sin embargo, se sugiere
correlacionar este dato con el desempeño de la misma estructura ósea en los
otros dos planos. Se observa, que el desempeño en amplitud angular para
pacientes está acotado en el intervalo [3.6, 9.5]; y en las personas sanas, el
intervalo es de [8, 21.8], para cualquier extremidad. Se detecta una
intersección entre los intervalos [8, 9.5].
c) El varo-valgo de rodilla caracterizado permite verificar, a partir de la amplitud
angular, el nivel clínico del sujeto de estudio; sin embargo, un desempeño
heterogéneo para ambas extremidades puede suscitarse no necesariamente
en pacientes con hemiplejia dado que la rodilla representa una de las
articulaciones más vulnerables. Se aprecia un desempeño aceptable en el
paciente 5 como en la persona sana 2, por lo que se sugiere correlacionar la
amplitud angular y la homogeneidad en el desempeño para ambas
extremidades con los resultados adquiridos en los otros dos planos
anatómicos.
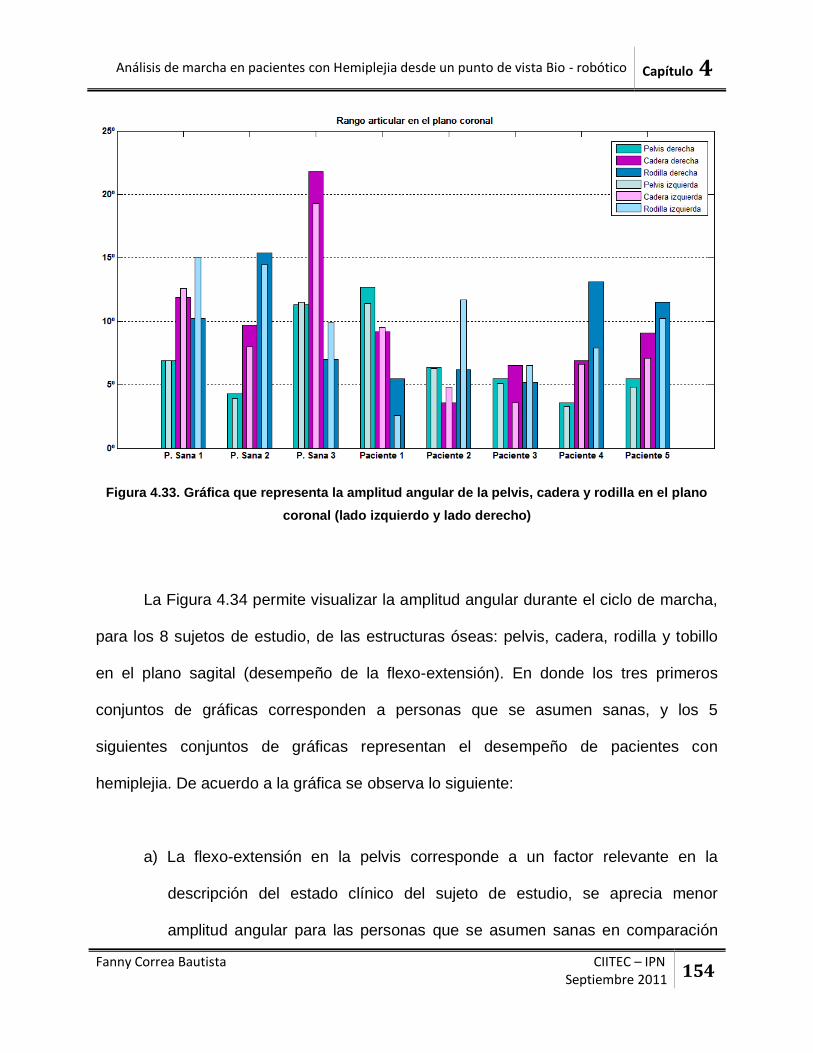
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 154
Figura 4.33. Gráfica que representa la amplitud angular de la pelvis, cadera y rodilla en el plano
coronal (lado izquierdo y lado derecho)
La Figura 4.34 permite visualizar la amplitud angular durante el ciclo de marcha,
para los 8 sujetos de estudio, de las estructuras óseas: pelvis, cadera, rodilla y tobillo
en el plano sagital (desempeño de la flexo-extensión). En donde los tres primeros
conjuntos de gráficas corresponden a personas que se asumen sanas, y los 5
siguientes conjuntos de gráficas representan el desempeño de pacientes con
hemiplejia. De acuerdo a la gráfica se observa lo siguiente:
a) La flexo-extensión en la pelvis corresponde a un factor relevante en la
descripción del estado clínico del sujeto de estudio, se aprecia menor
amplitud angular para las personas que se asumen sanas en comparación
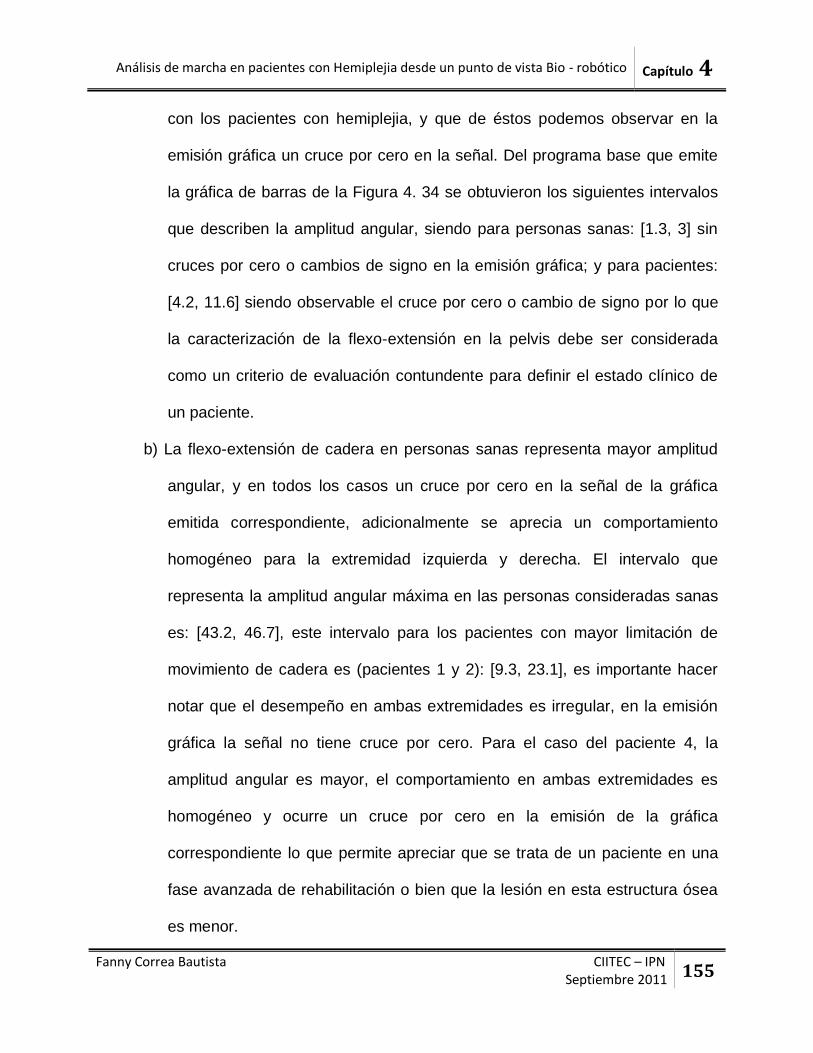
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 155
con los pacientes con hemiplejia, y que de éstos podemos observar en la
emisión gráfica un cruce por cero en la señal. Del programa base que emite
la gráfica de barras de la Figura 4. 34 se obtuvieron los siguientes intervalos
que describen la amplitud angular, siendo para personas sanas: [1.3, 3] sin
cruces por cero o cambios de signo en la emisión gráfica; y para pacientes:
[4.2, 11.6] siendo observable el cruce por cero o cambio de signo por lo que
la caracterización de la flexo-extensión en la pelvis debe ser considerada
como un criterio de evaluación contundente para definir el estado clínico de
un paciente.
b) La flexo-extensión de cadera en personas sanas representa mayor amplitud
angular, y en todos los casos un cruce por cero en la señal de la gráfica
emitida correspondiente, adicionalmente se aprecia un comportamiento
homogéneo para la extremidad izquierda y derecha. El intervalo que
representa la amplitud angular máxima en las personas consideradas sanas
es: [43.2, 46.7], este intervalo para los pacientes con mayor limitación de
movimiento de cadera es (pacientes 1 y 2): [9.3, 23.1], es importante hacer
notar que el desempeño en ambas extremidades es irregular, en la emisión
gráfica la señal no tiene cruce por cero. Para el caso del paciente 4, la
amplitud angular es mayor, el comportamiento en ambas extremidades es
homogéneo y ocurre un cruce por cero en la emisión de la gráfica
correspondiente lo que permite apreciar que se trata de un paciente en una
fase avanzada de rehabilitación o bien que la lesión en esta estructura ósea
es menor.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 156
c) La flexo-extensión de rodilla, para el caso de personas que se asumen como
sanas considera: mayor amplitud angular, desempeño homogéneo en ambas
extremidades y no hay cruce por cero en la emisión de gráfica. Para la
muestra de personas sanas sujetas a estudio en algunos casos ocurrió cruce
por cero en la señal correspondiente de manera muy ligera, casi al nivel
tangencial. Para el caso de los pacientes el limitado movimiento de flexo-
extensión de rodilla representa muy baja amplitud angular, sin cruces por cero
y desempeño irregular en ambas extremidades; sin embargo, el paciente 4
presenta mejor desempeño por contar con mayor amplitud angular, cruce por
cero de la señal articular y con comportamiento irregular en ambas
extremidades. El intervalo de amplitud angular en las personas sanas es:
[52.6, 58.1] y en pacientes con limitado movimiento es: [7.7, 37.5]. En este
último intervalo no fue considerado el paciente 4 por tener adecuado
desempeño en la flexo-extensión de la rodilla derecha.
d) Para la flexo-extensión plantar/dorsal, representativa del desempeño articular
en el tobillo, no es recomendable adjudicar a la condición clínica del sujeto de
estudio un análisis de la marcha en esta región a partir de la amplitud angular
y de si la señal articular tiene o no un cruce por cero. La gama de respuestas
en cuanto a esta articulación puede ser muy diversa, sin embargo, y de
acuerdo a la caracterización y emisión grafica la recomendación es realizar
un estudio comparativo de la fase de apoyo y la homogeneidad de un mismo
paciente con ambas extremidades. Para este último caso, las personas que
se asumen como sanas guardan una fase de apoyo al 60%, aceptable en un
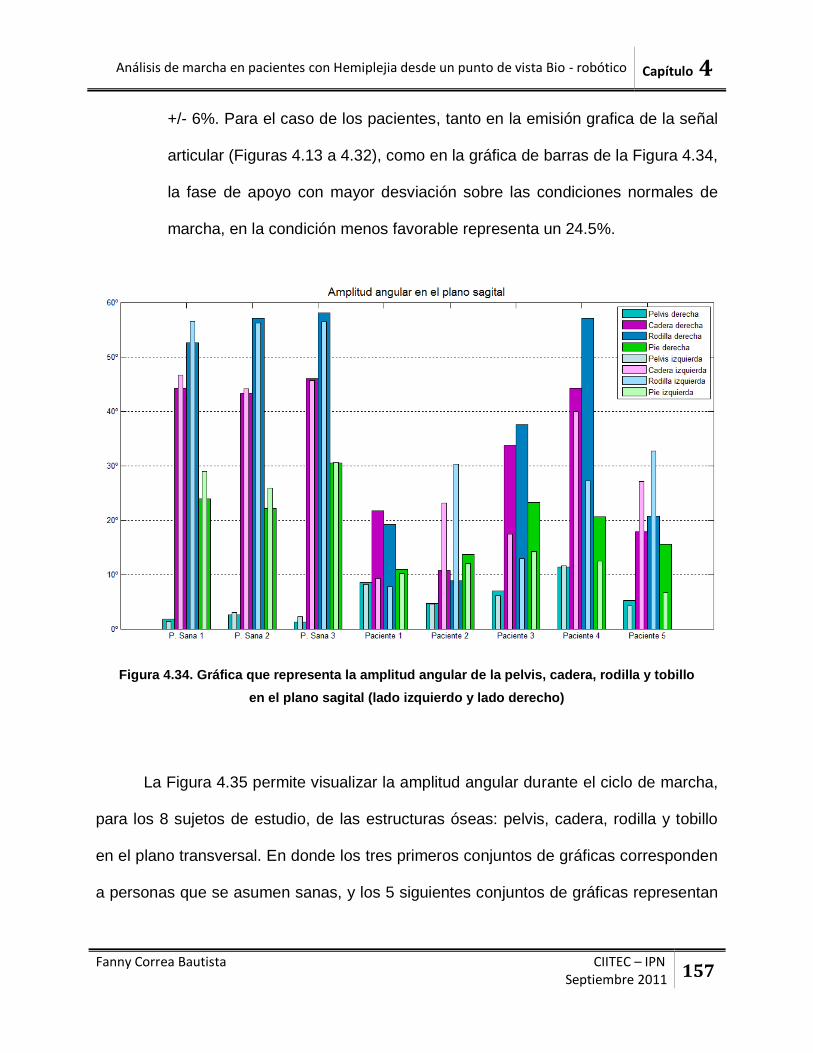
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 157
+/- 6%. Para el caso de los pacientes, tanto en la emisión grafica de la señal
articular (Figuras 4.13 a 4.32), como en la gráfica de barras de la Figura 4.34,
la fase de apoyo con mayor desviación sobre las condiciones normales de
marcha, en la condición menos favorable representa un 24.5%.
Figura 4.34. Gráfica que representa la amplitud angular de la pelvis, cadera, rodilla y tobillo
en el plano sagital (lado izquierdo y lado derecho)
La Figura 4.35 permite visualizar la amplitud angular durante el ciclo de marcha,
para los 8 sujetos de estudio, de las estructuras óseas: pelvis, cadera, rodilla y tobillo
en el plano transversal. En donde los tres primeros conjuntos de gráficas corresponden
a personas que se asumen sanas, y los 5 siguientes conjuntos de gráficas representan
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 158
el desempeño de pacientes con hemiplejia. De acuerdo a la gráfica se observa lo
siguiente:
a) La rotación de la pelvis, en condiciones normales de marcha representa una
señal articular (emisión de gráfica) de baja amplitud y cambio de signo (cruce
por cero). En la literatura se corroboran estos indicadores, así mismo en la
caracterización de marcha y la correspondiente emisión de gráficas para los tres
casos de personas que se asumen saludables (condiciones normales de
marcha). Para el caso de los pacientes, 2, 3 y 4 se cumplen con las condiciones
de amplitud angular y cambio de signo en la señal articular, por lo que no
podríamos asumir un estado de gravidez para esta articulación desde el punto
de vista del plano transversal, por lo que se sugiere revisar el desempeño en
otros planos anatómicos. Los pacientes 1 y 5 tienen un desempeño limitado en
amplitud angular sin posibilidad de cambio de signo en las señales articulares lo
que evidentemente manifiesta limitación de movimiento para este plano. De lo
anterior se puede decir que el desempeño articular en el plano transversal de la
pelvis puede ser considerado para diagnóstico si y solo si es correlacionado con
los resultados emitidos en los planos coronal y sagital.
b) La rotación de cadera, desde el punto de vista del plano transversal, advierte un
comportamiento de la señal articular uniforme, sin cambios abruptos en los
valores instantáneos para un ciclo de marcha normal y sin presentar cambio de
signo (cruce por cero). Estas condiciones fueron corroboradas en la
caracterización de ciclo de marcha y emisión de gráficas de las tres personas
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 159
que se asumen saludables. Para el caso de los 5 pacientes, al presentarse una
señal articular sin cambio de signo no es posible adjudicar a la evaluación, para
definir un diagnóstico, este criterio; sin embargo, es posible contar con una
evaluación a partir de un comportamiento irregular para ambas extremidades
(ver Figura 4.35), y adicionalmente correlacionar este dato con el desempeño de
la cadera desde el punto de vista de los otros dos planos anatómicos.
c) La rotación de rodilla, de acuerdo a la literatura, implica un cambio de signo en la
señal articular y con una conducta homogénea o regular para ambas
extremidades. La rodilla, como se ha descrito previamente, es una articulación
vulnerable por la intensa actividad a la que es sometida (máximas condiciones
elásticas y flexibles del cuerpo humano bajo condiciones de estrés: tensión-
compresión tolerando el peso del cuerpo), por lo que es posible encontrar
personas que tengan limitaciones motrices en esta articulación sin
necesariamente haber tenido un accidente cerebro-vascular. Este último
comentario es corroborado con los resultados de la caracterización y emisión
gráfica para lo que hemos denominado ciclo de marcha normal; la persona sana
1 y 2 advierten un comportamiento irregular en la rotación de rodilla en una de
sus extremidades (izquierda), la persona sana 3 tiene un desempeño de acuerdo
a lo previsto en un ciclo de marcha normal. Para el caso de los 5 pacientes, no
existe cambio de signo en la señal articular en ambas extremidades (excepto
paciente 2: desempeño irregular en ambas extremidades) lo que permite sugerir
que la rotación de rodilla es un adecuado criterio para definir las condiciones

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 160
clínicas del paciente (si y solo si existe la misma tendencia en ambas
extremidades).
d) El ángulo de progresión del pie/tobillo es posible visualizarlo a través de la
caracterización en el plano transversal, la literatura sugiere bajo condiciones
normales de marcha que el desempeño sea uniforme, sin cambios abruptos en
la señal articular, pero tampoco rigidez (limitada o nula cobertura angular), no
hay cambio de signo (cruce por cero) y la fase de apoyo ocurre alrededor del
60% del ciclo de marcha generalmente en la región de pendiente negativa en su
etapa inicial, muy cercana al valor máximo de la señal articular. La muestra de
sujetos de estudio en condiciones de salud verifican los criterios previamente
descritos. Para el caso de los pacientes, se advierte limitado movimiento y
rigidez en los casos 1, 2, 3 y 5 con un comportamiento irregular en ambas
extremidades, la morfología de la señal articular es tal que no es posible apreciar
la fase de apoyo y las condiciones descritas previamente para un ciclo de
marcha normal. De lo que se concluye que la amplitud angular y la
homogeneidad en el ángulo de progresión para ambas extremidades es el
criterio sugerido para la toma de decisiones clínicas y la descripción de las
condiciones del paciente.
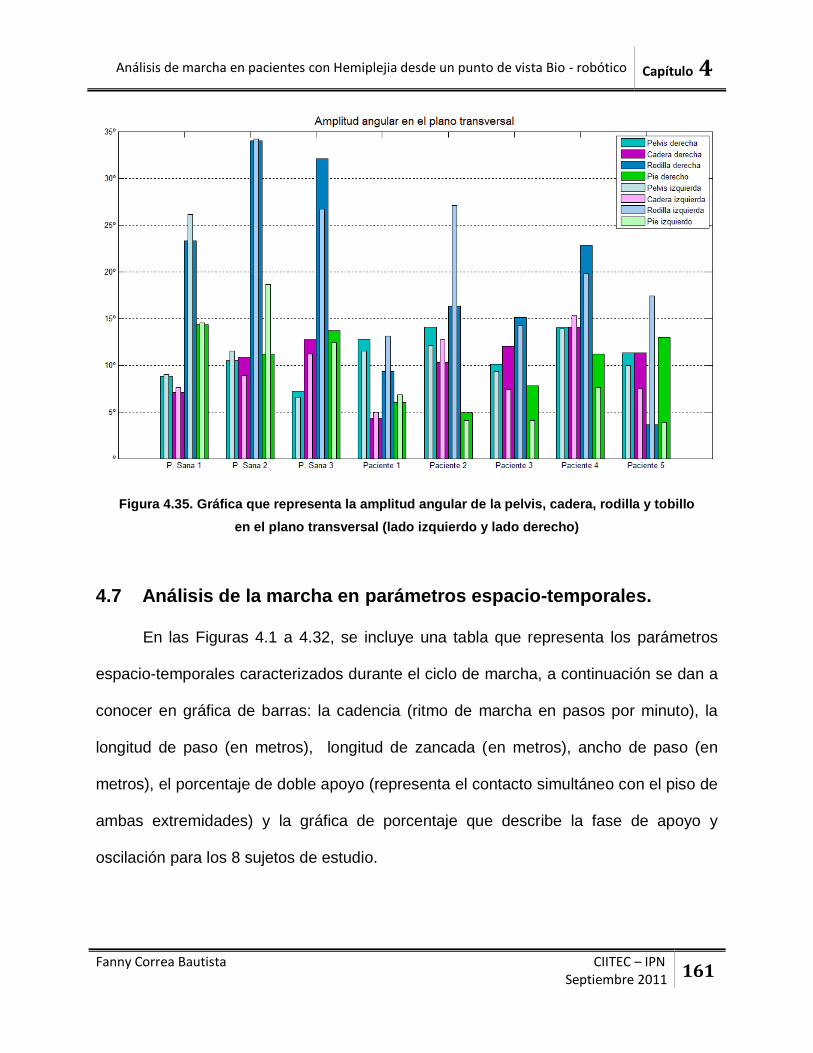
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 161
Figura 4.35. Gráfica que representa la amplitud angular de la pelvis, cadera, rodilla y tobillo
en el plano transversal (lado izquierdo y lado derecho)
4.7 Análisis de la marcha en parámetros espacio-temporales.
En las Figuras 4.1 a 4.32, se incluye una tabla que representa los parámetros
espacio-temporales caracterizados durante el ciclo de marcha, a continuación se dan a
conocer en gráfica de barras: la cadencia (ritmo de marcha en pasos por minuto), la
longitud de paso (en metros), longitud de zancada (en metros), ancho de paso (en
metros), el porcentaje de doble apoyo (representa el contacto simultáneo con el piso de
ambas extremidades) y la gráfica de porcentaje que describe la fase de apoyo y
oscilación para los 8 sujetos de estudio.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 162
En la Figura 4.36 se describe la cadencia experimentada por los 8 sujetos de
estudio durante el ciclo de marcha, se aprecia que la razón de pasos por minuto
representa al intento de garantizar una cadencia similar para cada uno de los pasos,
observando limitaciones evidentes en el paciente 5 con relación al resto de los sujetos
de estudio, quienes permitieron dar a conocer que la velocidad de desplazamiento a
través de la banda es independiente de la morfología de las señales articulares
descritas en la sección previa.
En la Figura 4.37 se presenta la longitud de paso para ambas extremidades
dimensionadas de talón a talón al ejecutar la marcha, tal que la suma de ambas
dimensiones constituye el valor medio de la zancada, misma que puede verse alterada
de la parte izquierda a la parte derecha. Para el caso de las personas que se asumen
sanas, la longitud de paso para ambas extremidades tiene un comportamiento
homogéneo o regular, muy superior al que evidentemente representa la caracterización
de los pacientes (excepto el paciente 4, cuyas condiciones de rehabilitación son
evidentes). La longitud de paso en pacientes, además de ser irregular en ambas
extremidades, representa en el caso de mayor gravidez (paciente 1) la quinta parte de
la longitud de paso que desarrolla una persona sana; en el mejor de los casos
representa la tercera parte. Esto indica que el paciente tuvo que desarrollar 5 y 3 veces
más respectivamente el ciclo de marcha, lo que implica un mayor esfuerzo en el
recorrido de la plataforma.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 163
En la Figura 4.38 se describe la longitud de zancada en metros, siendo evidente
el desempeño del ciclo de marcha normal en las personas sanas, hasta 5 veces
superior al caso con mayor gravidez de los pacientes. Es importante hacer notar que la
longitud de zancada cuantificada para ambas extremidades es regular en los 8 sujetos
de estudio por lo que la dimensión es el único criterio relevante para describir la
condición clínica de la persona.
En la Figura 4.39 se describe el ancho de paso en metros, es importante hacer
notar que ésta dimensión depende de manera relevante de la antropometría del sujeto
de estudio particularmente del ancho de pelvis. Sin embargo, y a pesar de la
regularidad en ambas extremidades se aprecia una mayor anchura de paso en los
pacientes 1 y 5, al recurrir a la emisión de gráficas correspondientes a la oblicuidad de
la pelvis y la aducción-abducción de cadera para los casos citados (Figuras 4.13 - 4.16
y Figuras 4.29 – 4.32) es evidente apreciar que la morfología de las señales articulares
en estas estructuras óseas visualizadas desde el plano coronal influyen de manera
determinante en las dimensiones del ancho de paso obtenidas en la caracterización.
En la Figura 4.40 se describe la gráfica de barras como resultado de la
caracterización del apoyo bipodal también conocida como subfase de doble apoyo
descrita en porcentaje del ciclo de marcha. Es evidente que en pacientes, además de
no contar con un desempeño regular en ambas extremidades el porcentaje es superior
al 10% considerado de un ciclo de marcha normal, excepto por el paciente 4. Las
condiciones con mayor gravidez son evidentes en el paciente 1 y 5 con desempeño
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 164
regular en ambas extremidades, y paciente 3 con desempeño irregular en ambas
extremidades.
En la Figura 4.41 se describe el desempeño de la fase de apoyo y la fase de
oscilación durante el ciclo de marcha en los 8 sujetos de estudio. En dicha gráfica se
presenta la guía que describe el cambio de fase en condiciones de marcha normal
(60%), es evidente el desempeño regular para ambas extremidades y muy cercano a
las condiciones de marcha normal para las 3 personas que se asumen sanas. La
gráfica ilustra la divergencia sobre las condiciones de marcha normal con relación a la
guía del cambio de fase para los 5 pacientes, teniendo el mejor desempeño el paciente
4, además de contar con un desempeño irregular para ambas extremidades. Una
gráfica de esta naturaleza representa un criterio para la valoración del estado clínico de
un paciente, o un conjunto de pacientes con relación al ciclo de marcha normal o
personas que se asumen como sanas; se puede establecer dicha valoración hasta por
simple inspección.
La Figura 4.42 describe a través de una gráfica de barras una relación de
proporcionalidad inversa entre los indicadores de velocidad promedio en
metros/segundo y el tiempo dedicado a la fase de apoyo en segundos. Es posible
apreciar, por simple inspección, la limitación de la marcha experimentada para el caso
de los pacientes (excepto paciente 4) ya que cuanto mayor inversión de tiempo se
dedica a la fase de apoyo la velocidad promedio es menor, lo que implica un

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 165
incremento substancial en el número de zancadas para la caracterización, y en
consecuencia un mayor esfuerzo.
Figura 4.36 Cadencia experimentada en 8 sujetos de estudio durante el ciclo de marcha.
Figura 4.37 Longitud de paso experimentada en 8 sujetos de estudio durante el ciclo de marcha (en ambas extremidades).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 166
Figura 4.38. Longitud de zancada experimentada en 8 sujetos de estudio
durante el ciclo de marcha (en ambas extremidades).
Figura 4.39. Ancho de paso experimentada en 8 sujetos de estudio
durante el ciclo de marcha (en ambas extremidades).

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 167
Figura 4.40 Subfase de doble apoyo experimentada en 8 sujetos de estudio durante el ciclo de marcha (en ambas extremidades).
Figura 4.41. Fase de apoyo y fase de oscilación en los 8 sujetos evaluados.
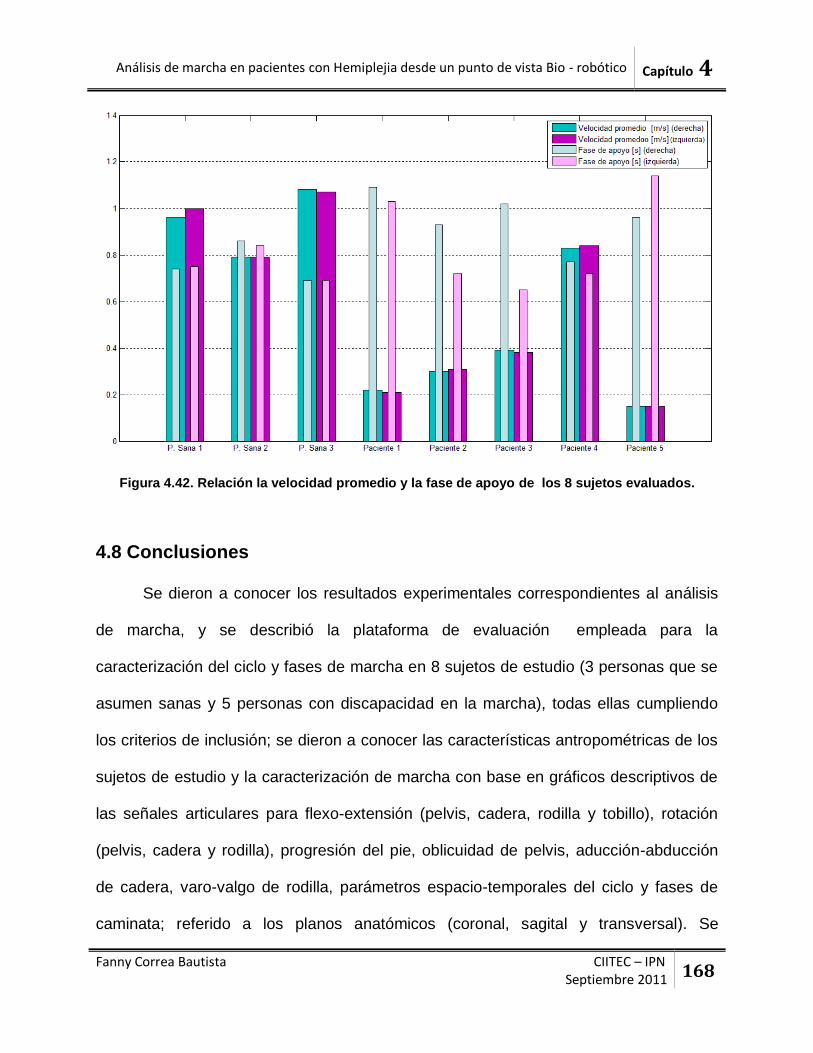
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 168
Figura 4.42. Relación la velocidad promedio y la fase de apoyo de los 8 sujetos evaluados.
4.8 Conclusiones
Se dieron a conocer los resultados experimentales correspondientes al análisis
de marcha, y se describió la plataforma de evaluación empleada para la
caracterización del ciclo y fases de marcha en 8 sujetos de estudio (3 personas que se
asumen sanas y 5 personas con discapacidad en la marcha), todas ellas cumpliendo
los criterios de inclusión; se dieron a conocer las características antropométricas de los
sujetos de estudio y la caracterización de marcha con base en gráficos descriptivos de
las señales articulares para flexo-extensión (pelvis, cadera, rodilla y tobillo), rotación
(pelvis, cadera y rodilla), progresión del pie, oblicuidad de pelvis, aducción-abducción
de cadera, varo-valgo de rodilla, parámetros espacio-temporales del ciclo y fases de
caminata; referido a los planos anatómicos (coronal, sagital y transversal). Se
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 169
discutieron las gráficas de desempeño en el ciclo de marcha de acuerdo a un ciclo de
marcha normal. Del análisis de marcha se concluye lo siguiente:
Las conclusiones siguientes permiten definir las condiciones clínicas de un
paciente, la región específica afectada y las recomendaciones para definir un dictamen
médico. Pese a la caracterización de 22 grados de libertad adjudicados a cada uno de
los ejes de giro que representan el desempeño articular, algunas caracterizaciones son
suficientes para definir la limitación de movimiento y a qué amplitud angular, sin
embargo, otras caracterizaciones por si misma no representan un resultado que
permita visualizar condiciones clínicas.
A partir de lo anterior se dan a conocer los siguientes comentarios del análisis de
marcha de interés para el diagnóstico:
a) La oblicuidad de la pelvis no permite verificar con certeza el estado clínico del
sujeto de estudio, ya que existe semejanza en ciertos comportamientos entre
personas sanas y pacientes.
b) La aducción-abducción de la cadera permite verificar el estado clínico del
sujeto de estudio a partir de la amplitud angular, sin embargo, se sugiere
correlacionar este dato con el desempeño de la misma estructura ósea en los
otros dos planos.
c) El varo-valgo de rodilla permite verificar, a partir de la amplitud angular, el
nivel clínico del sujeto de estudio; sin embargo, un desempeño heterogéneo

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 170
para ambas extremidades puede suscitarse no necesariamente en pacientes
con hemiplejia dado que la rodilla representa una de las articulaciones más
vulnerables.
d) La flexo-extensión en la pelvis corresponde a un factor relevante en la
descripción del estado clínico del sujeto de estudio, a partir de la amplitud
angular (mayor en pacientes con hemiplejia y cruce por cero en la señal
articular).
e) La flexo-extensión de cadera en personas sanas representa mayor amplitud
angular, y en todos los casos un cruce por cero en la señal de la gráfica
emitida correspondiente, adicionalmente se aprecia un comportamiento
homogéneo para la extremidad izquierda y derecha; caso contrario en
pacientes con hemiplejia.
d) La flexo-extensión de rodilla, para el caso de personas que se asumen como
sanas considera: mayor amplitud angular, desempeño homogéneo en ambas
extremidades y no hay cruce por cero en la emisión de gráfica; caso contrario
en pacientes con hemiplejia.
e) Para la flexo-extensión plantar/dorsal (tobillo), no es recomendable adjudicar
a la condición clínica del sujeto de estudio un análisis de la marcha en esta
región a partir de la amplitud angular y de si la señal articular tiene o no un
cruce por cero. La gama de respuestas en cuanto a esta articulación puede
ser muy diversa, se recomienda realizar un estudio comparativo de la fase de
apoyo y la homogeneidad de un mismo paciente con ambas extremidades.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 171
f) La rotación de la pelvis, en condiciones normales de marcha representa una
señal articular (emisión de gráfica) de baja amplitud y cambio de signo (cruce
por cero); caso contrario en pacientes con hemiplejia.
g) La rotación de cadera, desde el punto de vista del plano transversal, advierte
un comportamiento de la señal articular uniforme, sin cambios abruptos en
los valores instantáneos para un ciclo de marcha normal y sin presentar
cambio de signo (cruce por cero); caso contrario para pacientes con
hemiplejia.
h) La rotación de rodilla, implica un cambio de signo en la señal articular y con
una conducta homogénea o regular para ambas extremidades, en
condiciones normales de marcha; sin embargo, representa una articulación
vulnerable por la intensa actividad a la que es sometida por lo que es posible
encontrar personas que tengan limitaciones motrices en esta articulación sin
necesariamente haber tenido un accidente cerebro-vascular que derive en
una hemiplejia.
i) Para el ángulo de progresión del pie/tobillo, bajo condiciones normales de
marcha, el desempeño es uniforme sin cambios abruptos en la señal
articular, pero tampoco rigidez (limitada o nula cobertura angular), no hay
cambio de signo (cruce por cero) y la fase de apoyo ocurre alrededor del
60% del ciclo de marcha generalmente en la región de pendiente negativa en
su etapa inicial, muy cercana al valor máximo de la señal articular; caso
contrario en pacientes con hemiplejia.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 4
Fanny Correa Bautista CIITEC – IPN Septiembre 2011 172
j) La cadencia en el ciclo de marcha corresponde a la razón de pasos por
minuto, la velocidad de desplazamiento a través de la plataforma es
independiente de la morfología de las señales articulares.
k) La longitud de paso para ambas extremidades dimensionadas de talón a
talón al ejecutar la marcha, constituye el valor medio de la zancada, misma
que puede verse alterada de la parte izquierda a la parte derecha.
l) La longitud de zancada en metros, durante un ciclo de marcha normal puede
ser hasta 5 veces superior al caso con mayor gravidez de los pacientes con
hemiplejia.
m) El ancho de paso, medida en metros, es una dimensión que depende de
manera relevante de la antropometría del sujeto de estudio particularmente
del ancho de pelvis.
n) El apoyo bipodal o subfase de doble apoyo se caracteriza por contar con un
desempeño regular en ambas extremidades, donde el porcentaje es superior
al 10% considerado de un ciclo de marcha normal; caso contrario en
pacientes con hemiplejia.
o) El desempeño de la fase de apoyo y la fase de oscilación durante el ciclo de
marcha, es regular para ambas extremidades en personas sanas; caso
contrario en pacientes con hemiplejia.
p) Existe una relación de proporcionalidad inversa entre los indicadores de
velocidad promedio en metros/segundo y el tiempo dedicado a la fase de
apoyo en segundos, siendo evidente para el caso de las personas con
hemiplejia.
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
173
Capítulo 5 Desempeño Cinemático
5.1 Introducción
La caracterización de movimiento, la emisión de gráficas con relación al
desempeño articular de los ejes de giro en cada estructura ósea (pelvis, cadera, rodilla
y tobillo), y finalmente el análisis de movimiento en el ciclo de marcha constituyen los
fundamentos indispensables para describir el estado clínico de un paciente con
discapacidad de movimiento en miembros inferiores, tal es el caso de los hemipléjicos
[1][2]. Una de las perspectivas de éste trabajo de investigación y desarrollo tecnológico
representa el describir el principio de rehabilitación con base en el uso de tecnologías
modernas de rehabilitación como son el uso de dispositivos exoesqueletos descritos en
el capítulo 2. En éste capítulo, y con el propósito de mecanismo de rehabilitación se
propone, como contribución preliminar, la cadena cinemática de un dispositivo
exoesquelético que motiva la asistencia en la aducción-abducción de cadera, la
pronación-supinación de pie y la flexo-extensión de cadera, rodilla y tobillo de ambas
extremidades; elementos que influyen en la rehabilitación del resto de las articulaciones
caracterizadas. De la cadena propuesta, y a partir de los parámetros Denavit-
Hartenberg y matrices elementales para transformaciones homogéneas se calculan las
ecuaciones de la cinemática directa de posición de cada articulación, útiles en la
planificación de movimiento del exoesqueleto final, y la visualización virtual
(perspectivas de trabajo) [3][4][5].

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
174
5.2 Procedimiento para el diseño de un robot exoesqueleto
De acuerdo al análisis de marcha, y a los propósitos de los sistemas robóticos
complejos ideados para asistencia médica y rehabilitación, el procedimiento sugerido
para el diseño y construcción de dispositivos exoesqueletos es el siguiente:
1. Conocer los límites de movimiento articular (amplitud angular) y espacio de
configuraciones admisibles de acuerdo a los ejes de giro y planos de movimiento
(biomecánica normal de marcha).
2. Considerando tres grados de libertad por estructura ósea, el sistema de marcha
bípeda debe considerar 24 ejes de giro (4 estructuras óseas en cada una de las
extremidades). De acuerdo a esto se debe proponer una cadena cinemática con
articulaciones de revolución y dimensiones de longitudes de eslabones con base en
las mediciones antropométricas, y estándares de la región. La cadena cinemática
debe considerar el número de grados de libertad en función de los ejes de giro de
las estructuras óseas sobre las cuales se desea influir en rehabilitación, las mejores
condiciones corresponden a 24.
3. Obtener el modelo cinemático directo de posición, que describe las coordenadas
cartesianas en función de las variables articulares.
4. Evaluar al conjunto de ecuaciones que describen a la cinemática de posición en un
esquema de simulación 3D, contando como entrada la biomecánica de marcha para
reproducir los movimientos caracterizados.
5. Diseñar el mecanismo de eslabones articulados y obtener el modelo dinámico que
considere propiedades relativas a las fuerzas inerciales, los fenómenos de Coriolis,
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
175
las fuerzas centrípetas, las fuerzas gravitacionales y finalmente las tribológicas
(vibraciones mecánicas y dinámica de fricción).
6. Selección de elementos finales de control o actuadores (servomotores) con las
características adecuadas para compensar la dinámica del cuerpo humano de
acuerdo a la fisiología de interacción (fuerzas musculares, y límites de operación).
7. Selección de dispositivos de percepción propioceptiva provista de sensores de
posición y velocidad articular, útiles no solo para la caracterización de movimiento,
también para la retroalimentación de señal útil en la aplicación de las leyes de
control, que se emplearán para que el robot desarrolle movimientos controlados,
guiando al operador humano (paciente) en las trayectorias articulares planificadas,
de acuerdo a los límites biomecánicos y los caracterizados por el paciente.
8. Diseño y selección de las estrategias de control de movimiento (posición y
velocidad), y fuerza de interacción para estabilizar en la trayectoria óptima al robot
con el operador humano en el lazo.
El procedimiento requiere considerar esquemas de simulación digital, y en
algunos casos, visualización 3D basada en técnicas de realidad virtual de manera
previa a la construcción física, con el propósito de validar cada uno de los diseños.
Ésta tesis cuenta con diversas contribuciones para el propósito planteado
preliminarmente, la última de las contribuciones corresponde al diseño de una cadena
cinemática, la obtención de los parámetros Denavit-Hartenberg, las matrices
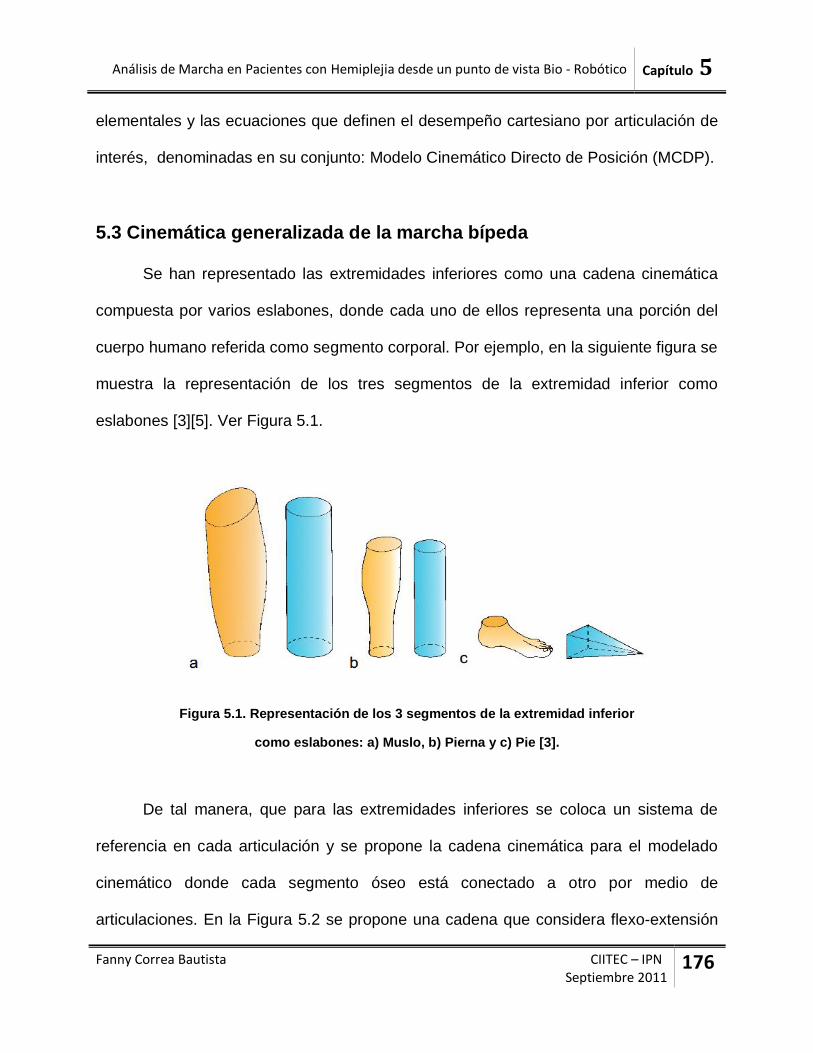
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
176
elementales y las ecuaciones que definen el desempeño cartesiano por articulación de
interés, denominadas en su conjunto: Modelo Cinemático Directo de Posición (MCDP).
5.3 Cinemática generalizada de la marcha bípeda
Se han representado las extremidades inferiores como una cadena cinemática
compuesta por varios eslabones, donde cada uno de ellos representa una porción del
cuerpo humano referida como segmento corporal. Por ejemplo, en la siguiente figura se
muestra la representación de los tres segmentos de la extremidad inferior como
eslabones [3][5]. Ver Figura 5.1.
Figura 5.1. Representación de los 3 segmentos de la extremidad inferior
como eslabones: a) Muslo, b) Pierna y c) Pie [3].
De tal manera, que para las extremidades inferiores se coloca un sistema de
referencia en cada articulación y se propone la cadena cinemática para el modelado
cinemático donde cada segmento óseo está conectado a otro por medio de
articulaciones. En la Figura 5.2 se propone una cadena que considera flexo-extensión

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
177
de cadera, rodilla y tobillo; así como aducción-abducción de cadera y pronación-
supinación de tobillo (pie) correspondiente a las articulaciones con más efectos
presentes en el proceso de la marcha.
Figura 5.2. Cadena cinemática propuesta para las extremidades inferiores.
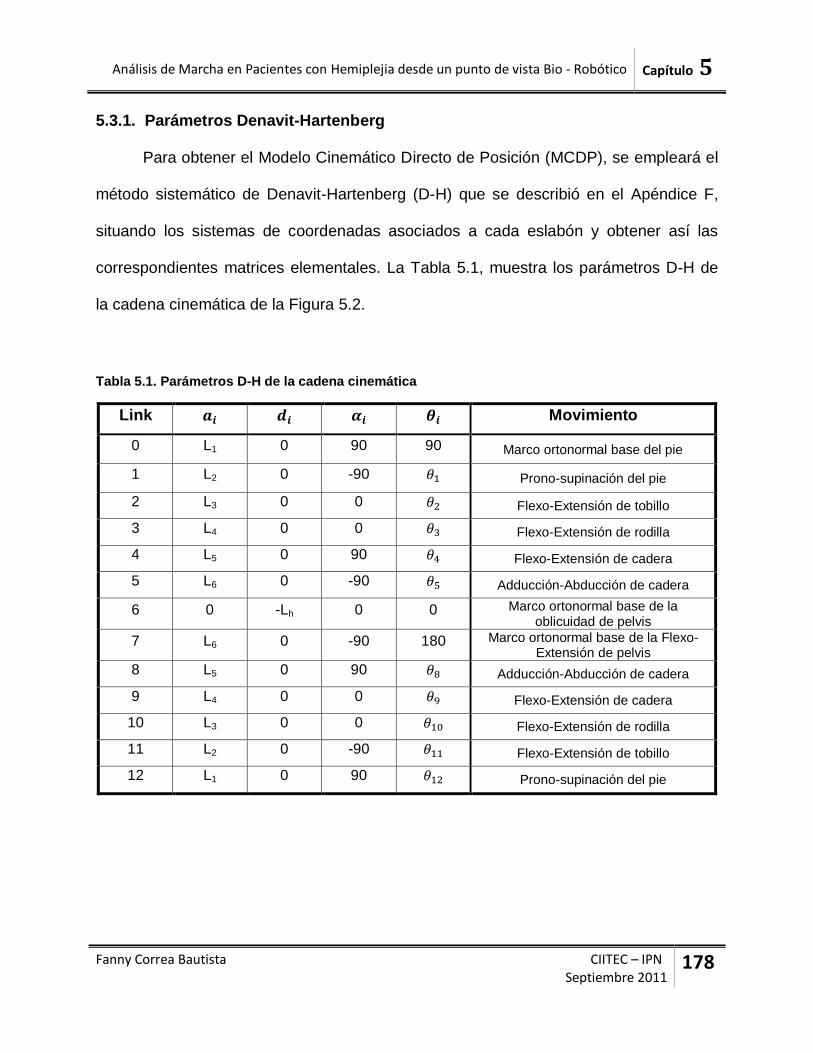
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
178
5.3.1. Parámetros Denavit-Hartenberg
Para obtener el Modelo Cinemático Directo de Posición (MCDP), se empleará el
método sistemático de Denavit-Hartenberg (D-H) que se describió en el Apéndice F,
situando los sistemas de coordenadas asociados a cada eslabón y obtener así las
correspondientes matrices elementales. La Tabla 5.1, muestra los parámetros D-H de
la cadena cinemática de la Figura 5.2.
Tabla 5.1. Parámetros D-H de la cadena cinemática
Link Movimiento
0 L1 0 90 90 Marco ortonormal base del pie
1 L2 0 -90 Prono-supinación del pie
2 L3 0 0 Flexo-Extensión de tobillo
3 L4 0 0 Flexo-Extensión de rodilla
4 L5 0 90 Flexo-Extensión de cadera
5 L6 0 -90 Adducción-Abducción de cadera
6 0 -Lh 0 0 Marco ortonormal base de la oblicuidad de pelvis
7 L6 0 -90 180 Marco ortonormal base de la Flexo-Extensión de pelvis
8 L5 0 90 Adducción-Abducción de cadera
9 L4 0 0 Flexo-Extensión de cadera
10 L3 0 0 Flexo-Extensión de rodilla
11 L2 0 -90 Flexo-Extensión de tobillo
12 L1 0 90 Prono-supinación del pie

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
179
5.3.2. Matrices elementales
De los parámetros D-H que se presentan en la tabla anterior, se sustituyen los
parámetros correspondientes del eslabón i en la matriz de transformación Ai, que es la
matriz de transformación base. Así, de la matriz de transformación se obtienen las 12
matrices elementales.
(EC 5.1)
Evaluando los parámetros D-H de la tabla 5.1, en la EC 5.1, se obtienen las
matrices elementales siguientes:
(EC 5.2)
(EC 5.3)
(EC 5.4)
(EC 5.5)
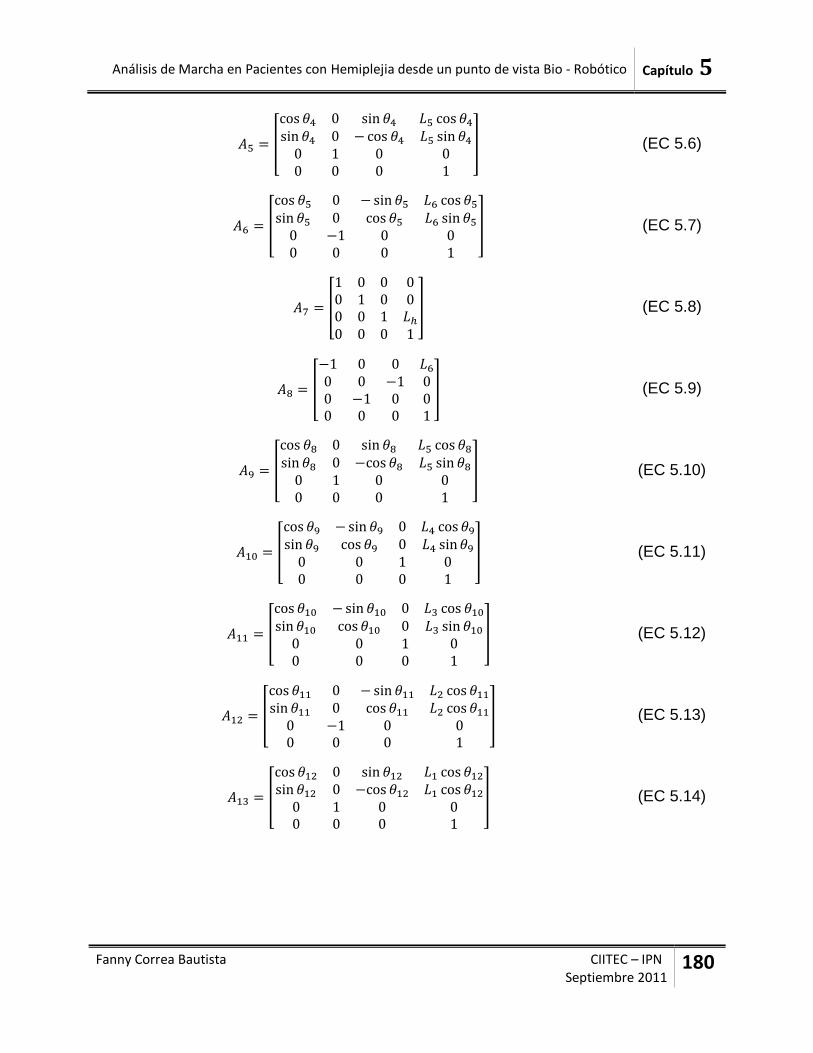
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
180
(EC 5.6)
(EC 5.7)
(EC 5.8)
(EC 5.9)
(EC 5.10)
(EC 5.11)
(EC 5.12)
(EC 5.13)
(EC 5.14)

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
181
El conjunto de ecuaciones previas (EC 5.2 a EC 5.14) constituyen al grupo de
matrices elementales de la cadena cinemática propuesta. En el Apéndice D se
presentan los programas desarrollados en Matlab para la obtención de las matrices
elementales, y la cinemática de posición por articulación. Para ello se propone un
análisis cinemático del marco ortonormal 7 al 0 para la extremidad derecha, y del 7 al
13 para la extremidad izquierda.
La descripción de las ecuaciones que representan al MCDP; útiles para
visualización, análisis en el espacio cartesiano, y diseño; corresponden a las
articulaciones y marcos ortonormales para pronación supinación del pie, flexo-
extensión del pie, flexo-extensión de rodilla, flexo-extensión de cadera, y aducción-
abducción de cadera en ambas extremidades. Para la evaluación de prueba, se
propone considerar la caracterización de la persona Sana 1 (documentada en el
capítulo 4) cuyas gráficas articulares para la evaluación en cada estructura ósea
previamente citadas son descritas en las Figuras 5.3 y 5.4.
Se describen en cada caso las evaluaciones de la cinemática directa de posición
para cada articulación a partir del marco ortonormal 7 con relación al porcentaje del
ciclo de marcha. La pronación-supinación del tobillo/pie es considerada con un
desempeño angular nulo, ya que corresponde a un dato no caracterizado.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
182
Figura 5.3 Flexo-extensión de tobillo, rodilla, cadera, y aducción-abducción de cadera para la
extremidad derecha en el sujeto de estudio Sano 1.
Figura 5.4 Flexo-extensión de tobillo, rodilla, cadera, y aducción-abducción de cadera para la
extremidad izquierda en el sujeto de estudio Sano 1.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
183
5.4 Modelo Cinemático Directo de Posición para la extremidad
derecha
5.4.1. MCDP Pelvis-Tobillo (marco ortonormal base del pie: marco ortonormal 0)
El producto de las matrices elementales que describen al MCDP pelvis-tobillo al
marco ortonormal base del pie (marco ortonormal 0) es descrito en la EC 5.15,
EC 5.15
La matriz de transformación homogénea correspondiente es:
EC 5.16
Dónde los correspondientes elementos son:
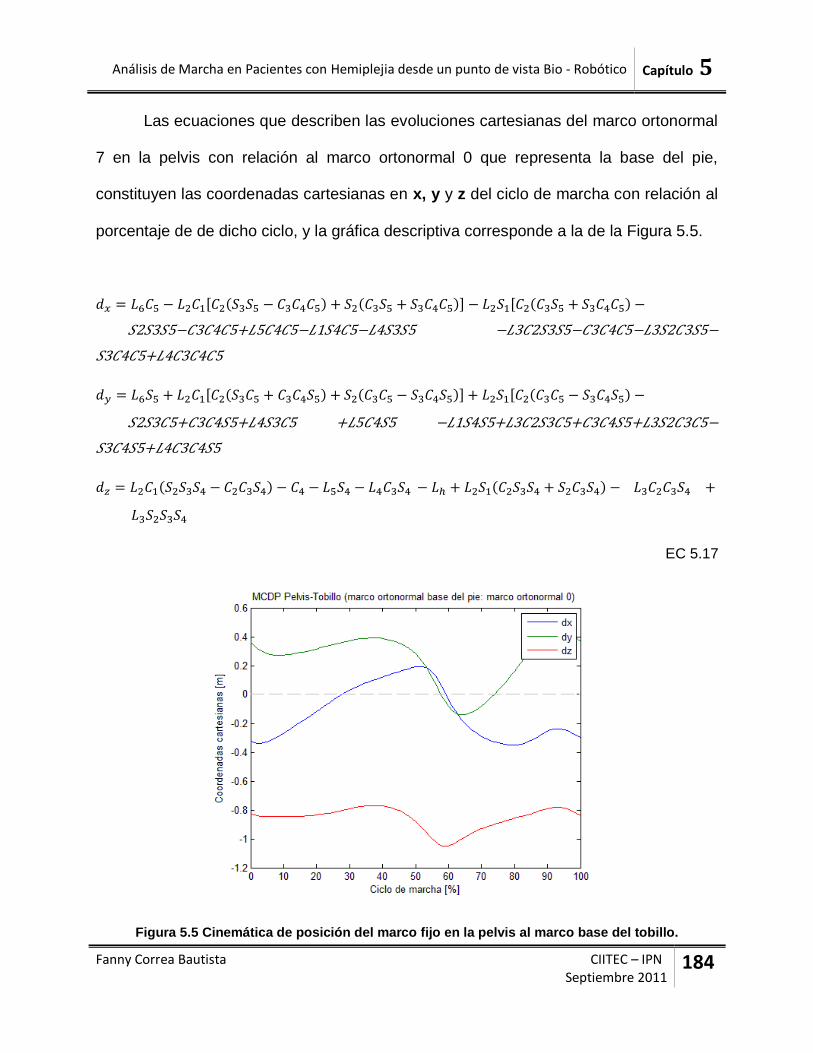
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
184
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 0 que representa la base del pie,
constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con relación al
porcentaje de de dicho ciclo, y la gráfica descriptiva corresponde a la de la Figura 5.5.
2 3 5 3 4 5+ 5 4 5 1 4 5 4 3 5 3 2 3 5 3 4 5 3 2 3 5
3 4 5+ 4 3 4 5
2 3 5+ 3 4 5+ 4 3 5 + 5 4 5 1 4 5+ 3 2 3 5+ 3 4 5+ 3 2 3 5
3 4 5+ 4 3 4 5
EC 5.17
Figura 5.5 Cinemática de posición del marco fijo en la pelvis al marco base del tobillo.
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
185
5.4.2. MCDP Pelvis-Tobillo (pronación-supinación: marco ortonormal 1)
El producto de las matrices elementales que describen al MCDP pelvis-tobillo al
marco ortonormal de la pronación-supinación del tobillo/pie (marco ortonormal 1) es
descrito en la EC 5.18,
EC 5.18
La matriz de transformación homogénea correspondiente es:
EC 5.19
Dónde los correspondientes elementos son:
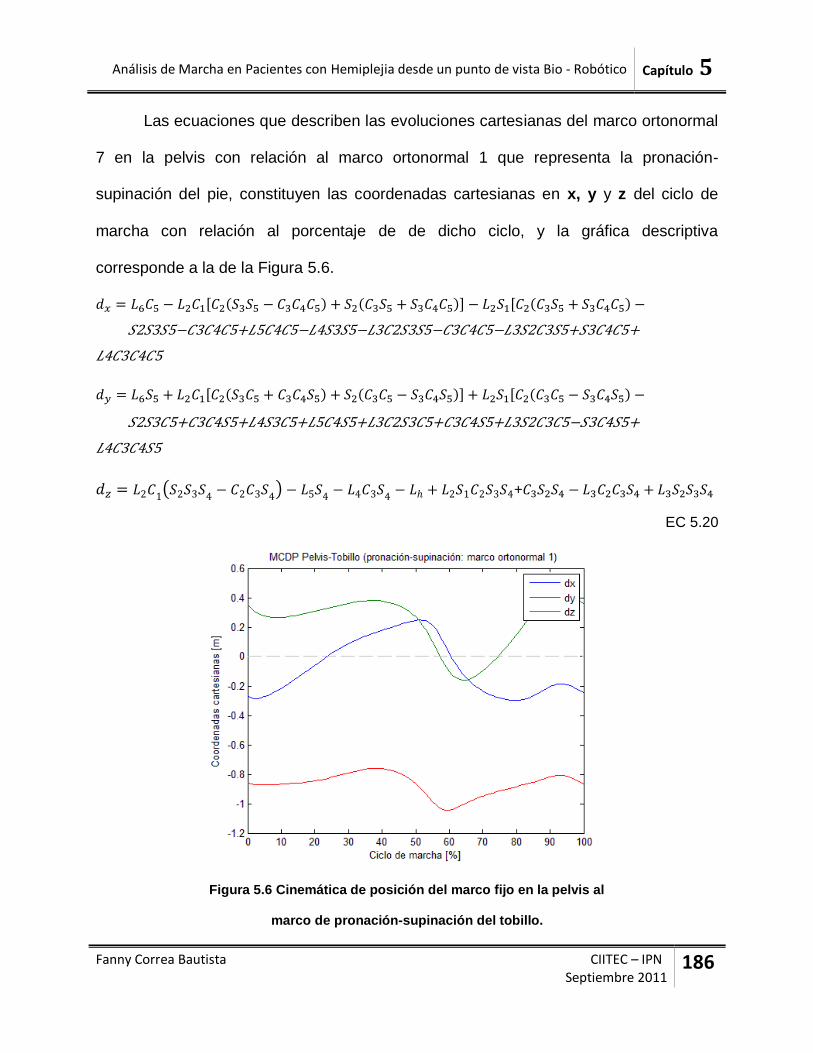
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
186
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 1 que representa la pronación-
supinación del pie, constituyen las coordenadas cartesianas en x, y y z del ciclo de
marcha con relación al porcentaje de de dicho ciclo, y la gráfica descriptiva
corresponde a la de la Figura 5.6.
2 3 5 3 4 5+ 5 4 5 4 3 5 3 2 3 5 3 4 5 3 2 3 5+ 3 4 5+
4 3 4 5
2 3 5+ 3 4 5+ 4 3 5+ 5 4 5+ 3 2 3 5+ 3 4 5+ 3 2 3 5 3 4 5+
4 3 4 5
+
EC 5.20
Figura 5.6 Cinemática de posición del marco fijo en la pelvis al
marco de pronación-supinación del tobillo.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
187
5.4.3. MCDP Pelvis-Tobillo (Flexo-extensión: marco ortonormal 2)
El producto de las matrices elementales que describen al MCDP pelvis-tobillo al
marco ortonormal de la flexo-extensión del tobillo (marco ortonormal 2) es descrito en la
EC 5.21,
EC 5.21
La matriz de transformación homogénea correspondiente es:
EC 5.22
Dónde los correspondientes elementos son:
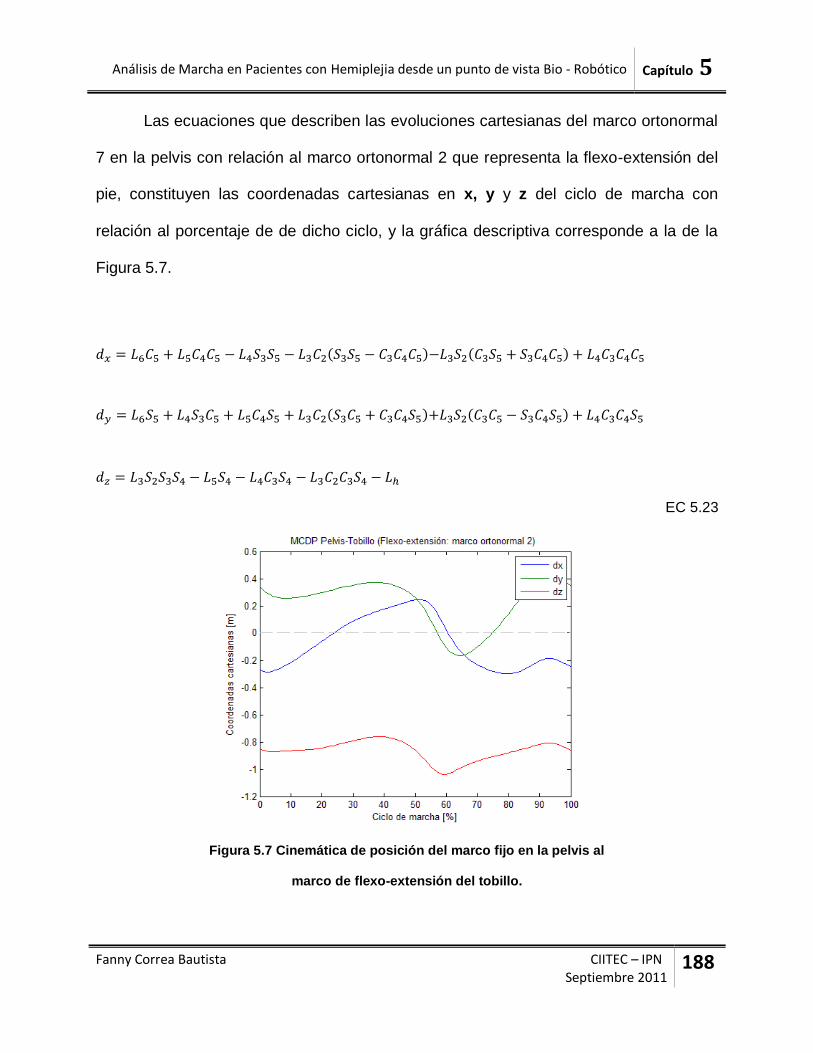
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
188
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 2 que representa la flexo-extensión del
pie, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de de dicho ciclo, y la gráfica descriptiva corresponde a la de la
Figura 5.7.
EC 5.23
Figura 5.7 Cinemática de posición del marco fijo en la pelvis al
marco de flexo-extensión del tobillo.
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
189
5.4.4. MCDP Pelvis-Rodilla (Flexo-extensión: marco ortonormal 3)
El producto de las matrices elementales que describen al MCDP pelvis-rodilla al
marco ortonormal de la flexo-extensión del rodilla (marco ortonormal 3) es descrito en
la EC 5.24,
EC 5.24
La matriz de transformación homogénea correspondiente es:
EC 5.25
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 3 que representa la flexo-extensión de
la rodilla, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de dicho ciclo son definidas en los elementos (1,4), (2,4), y (3,4),
y la gráfica descriptiva corresponde a la de la Figura 5.8.
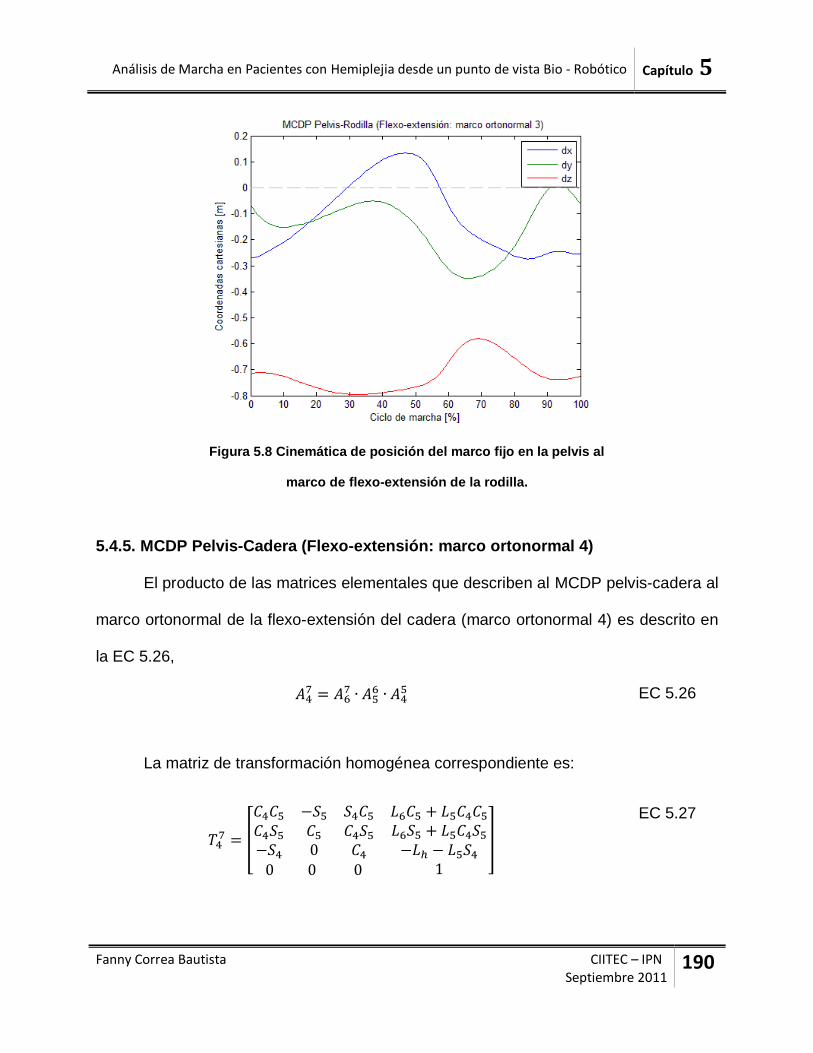
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
190
Figura 5.8 Cinemática de posición del marco fijo en la pelvis al
marco de flexo-extensión de la rodilla.
5.4.5. MCDP Pelvis-Cadera (Flexo-extensión: marco ortonormal 4)
El producto de las matrices elementales que describen al MCDP pelvis-cadera al
marco ortonormal de la flexo-extensión del cadera (marco ortonormal 4) es descrito en
la EC 5.26,
EC 5.26
La matriz de transformación homogénea correspondiente es:
EC 5.27

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
191
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 4 que representa la flexo-extensión de
la cadera, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4), (2,4), y (3,4),
y la gráfica descriptiva corresponde a la de la Figura 5.9.
Figura 5.9 Cinemática de posición del marco fijo en la pelvis al
marco de flexo-extensión de la cadera.
5.4.6. MCDP Pelvis-Cadera (Adducción-Abducción: marco ortonormal 5)
El producto de las matrices elementales que describen al MCDP pelvis-cadera al
marco ortonormal de la aducción-abducción de cadera (marco ortonormal 5) es descrito
en la EC 5.28,
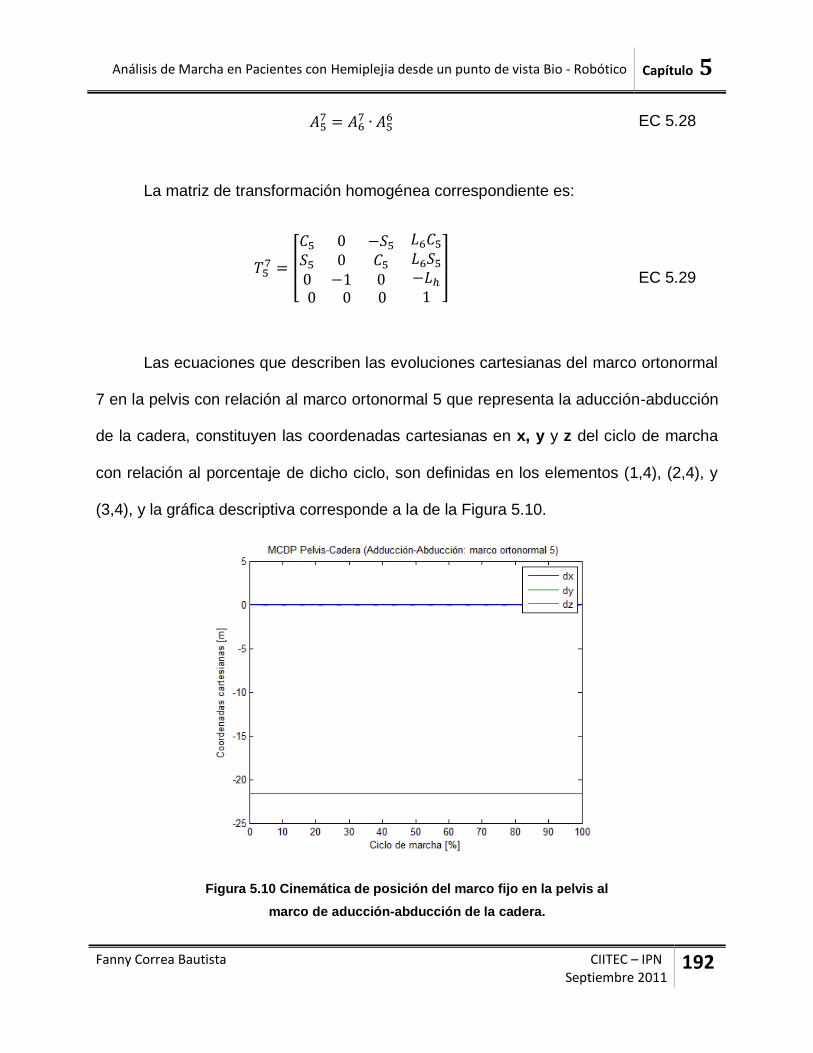
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
192
EC 5.28
La matriz de transformación homogénea correspondiente es:
EC 5.29
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 5 que representa la aducción-abducción
de la cadera, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha
con relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4), (2,4), y
(3,4), y la gráfica descriptiva corresponde a la de la Figura 5.10.
Figura 5.10 Cinemática de posición del marco fijo en la pelvis al
marco de aducción-abducción de la cadera.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
193
5.5 Modelo Cinemático Directo de Posición para la extremidad
izquierda
5.5.1. MCDP Pelvis-Tobillo (marco ortonormal base del pie: marco ortonormal 13)
El producto de las matrices elementales que describen al MCDP pelvis-tobillo al
marco ortonormal base del pie (marco ortonormal 13) es descrito en la EC 5.30,
EC 5.30
La matriz de transformación homogénea correspondiente es:
EC 5.31
Donde los correspondientes elementos son:
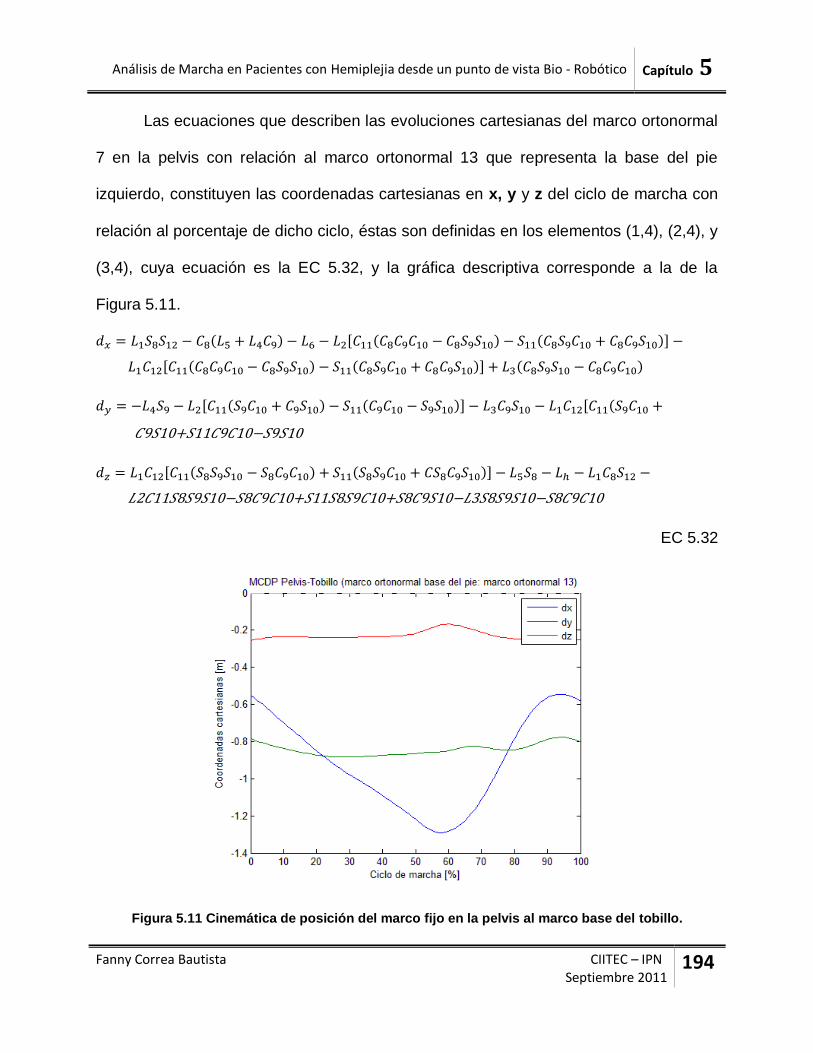
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
194
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 13 que representa la base del pie
izquierdo, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de dicho ciclo, éstas son definidas en los elementos (1,4), (2,4), y
(3,4), cuya ecuación es la EC 5.32, y la gráfica descriptiva corresponde a la de la
Figura 5.11.
9 10+ 11 9 10 9 10
2 11 8 9 10 8 9 10+ 11 8 9 10+ 8 9 10 3 8 9 10 8 9 10
EC 5.32
Figura 5.11 Cinemática de posición del marco fijo en la pelvis al marco base del tobillo.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
195
5.5.2. MCDP Pelvis-Tobillo (pronación-supinación: marco ortonormal 12)
El producto de las matrices elementales que describen al MCDP pelvis-tobillo al
marco ortonormal de la pronación-supinación del tobillo (marco ortonormal 12) es
descrito en la EC 5.33,
EC 5.33
La matriz de transformación homogénea correspondiente es:
EC 5.34
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 12 que representa la pronación-
supinación del tobillo, constituyen las coordenadas cartesianas en x, y y z del ciclo de
marcha con relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4),
(2,4), y (3,4), y la gráfica descriptiva corresponde a la de la Figura 5.12.
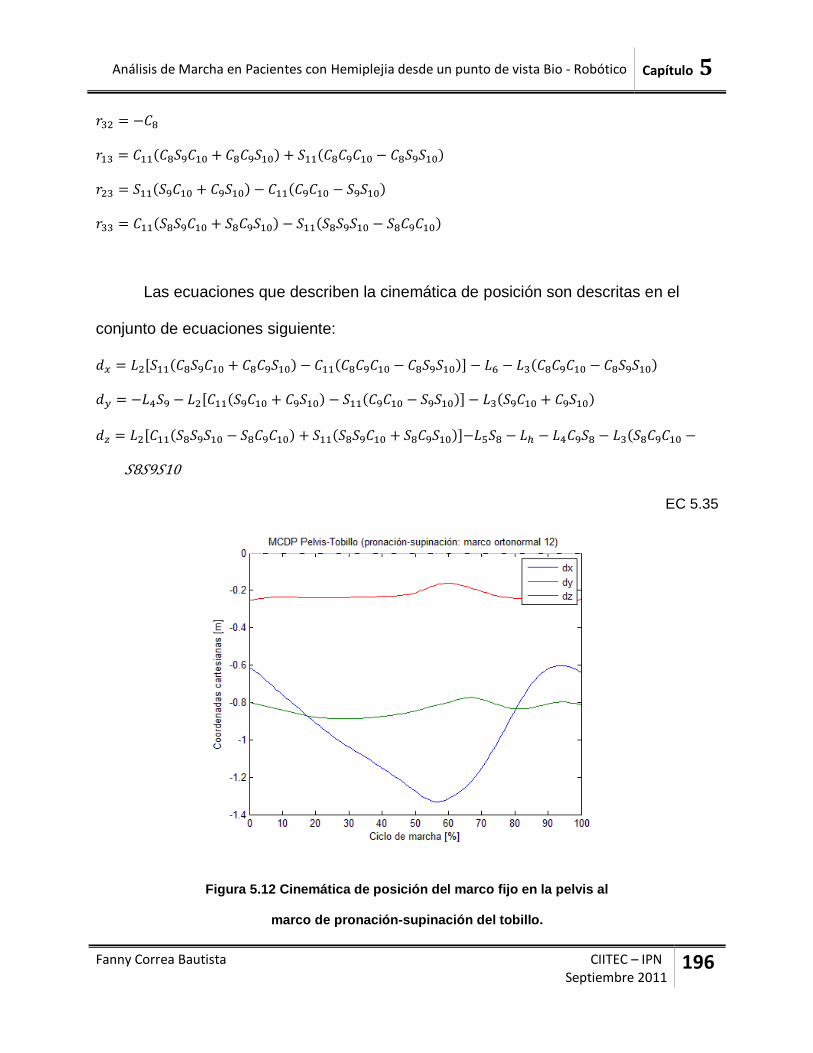
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
196
Las ecuaciones que describen la cinemática de posición son descritas en el
conjunto de ecuaciones siguiente:
8 9 10
EC 5.35
Figura 5.12 Cinemática de posición del marco fijo en la pelvis al
marco de pronación-supinación del tobillo.
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
197
5.5.3. MCDP Pelvis-Tobillo (Flexo-extensión: marco ortonormal 11)
El producto de las matrices elementales que describen al MCDP pelvis-tobillo al
marco ortonormal de flexoextensión de tobillo (marco ortonormal 11) es descrito en la
EC 5.36,
EC 5.36
La matriz de transformación homogénea correspondiente es:
EC 5.37
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 11 que representa la flexo-extensión de
tobillo, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4), (2,4), y (3,4),
y la gráfica descriptiva corresponde a la de la Figura 5.13.
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
198
Figura 5.13 Cinemática de posición del marco fijo en la pelvis al
marco de flexo-extensión del tobillo.
5.5.4. MCDP Pelvis-Rodilla (Flexo-extensión: marco ortonormal 10)
El producto de las matrices elementales que describen al MCDP pelvis-rodilla al
marco ortonormal de la flexo-extensión de rodilla (marco ortonormal 10) es descrito en
la EC 5.39,
EC 5.39
La matriz de transformación homogénea correspondiente es:
EC 5.40
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
199
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 10 que representa la flexo-extensión de
rodilla, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4), (2,4), y (3,4),
y la gráfica descriptiva corresponde a la de la Figura 5.14.
Figura 5.14 Cinemática de posición del marco fijo en la pelvis al
marco de flexo-extensión de la rodilla.
5.5.5. MCDP Pelvis-Cadera (Flexo-extensión: marco ortonormal 9)
El producto de las matrices elementales que describen al MCDP pelvis-cadera al
marco ortonormal de flexo-extensión de cadera (marco ortonormal 9) es descrito en la
EC 5.41,
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
200
EC 5.41
La matriz de transformación homogénea correspondiente es:
EC 5.42
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 9 que representa la flexoestensión de la
cadera, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha con
relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4), (2,4), y (3,4),
de la ecuación EC 5.42, y la gráfica descriptiva corresponde a la de la Figura 5.15.
Figura 5.15 Cinemática de posición del marco fijo en la pelvis al
marco de flexo-extensión de la cadera.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
201
5.5.6. MCDP Pelvis-Cadera (Adducción-Abducción: marco ortonormal 8)
El producto de las matrices elementales que describen al MCDP pelvis-cadera al
marco ortonormal de la aducción-abducción de cadera (marco ortonormal 8) es descrito
en la EC 5.43,
EC 5.43
La matriz de transformación homogénea correspondiente es:
EC 5.44
Las ecuaciones que describen las evoluciones cartesianas del marco ortonormal
7 en la pelvis con relación al marco ortonormal 8 que representa la aducción-abducción
de la cadera, constituyen las coordenadas cartesianas en x, y y z del ciclo de marcha
con relación al porcentaje de dicho ciclo, son definidas en los elementos (1,4), (2,4), y
(3,4), de la ecuación EC 5.44, y la gráfica descriptiva corresponde a la de la Figura
5.16. En ella se aprecia movimiento limitado en el espacio cartesiano.
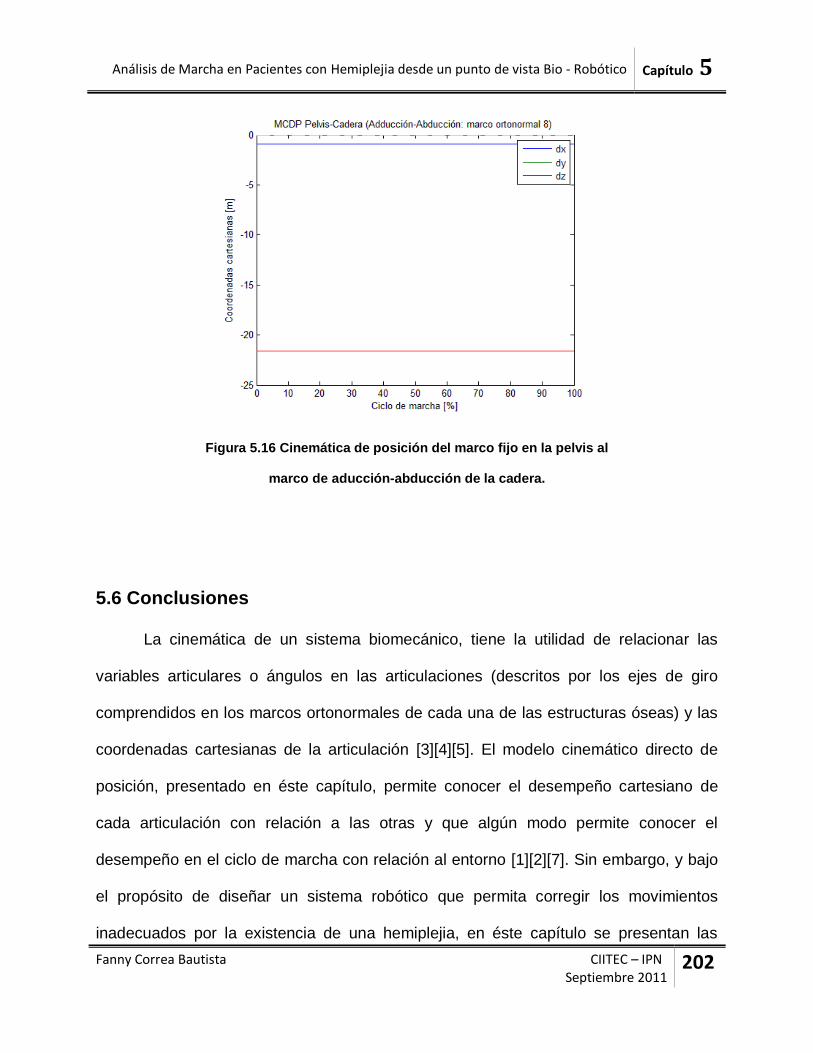
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
202
Figura 5.16 Cinemática de posición del marco fijo en la pelvis al
marco de aducción-abducción de la cadera.
5.6 Conclusiones
La cinemática de un sistema biomecánico, tiene la utilidad de relacionar las
variables articulares o ángulos en las articulaciones (descritos por los ejes de giro
comprendidos en los marcos ortonormales de cada una de las estructuras óseas) y las
coordenadas cartesianas de la articulación [3][4][5]. El modelo cinemático directo de
posición, presentado en éste capítulo, permite conocer el desempeño cartesiano de
cada articulación con relación a las otras y que algún modo permite conocer el
desempeño en el ciclo de marcha con relación al entorno [1][2][7]. Sin embargo, y bajo
el propósito de diseñar un sistema robótico que permita corregir los movimientos
inadecuados por la existencia de una hemiplejia, en éste capítulo se presentan las
Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
203
bases del trabajo futuro descrito en la sección 4.2 con relación al diseño final,
construcción y control de movimiento y fuerza de un exoesqueleto de 10 articulaciones
de revolución, para retroalimentar el movimiento en ambas extremidades inferiores con
relación a la estimulación directa en flexo-extensión de cadera, rodilla y tobillo;
pronación-supinación de tobillo/pie y aducción-abducción de cadera; articulaciones que
se asumen más vulnerables, y que de acuerdo a los estudios y análisis de marcha en
los 5 pacientes descritos en el capítulo 4, resulta pertinente un mecanismo de
eslabones articulados con éstas características. Para la obtención de las ecuaciones
cinemáticas y la obtención de las gráficas se desarrollo un programa en Matlab con
librerías de matemática simbólica. La entrada de datos estuvo definida por el
desempeño articular de uno de los sujetos de estudio en condiciones que se asumen
saludables (sano 1), de manera tal que es posible de manera automática conocer el
desempeño cartesiano para los otros 7 sujetos de estudio. Una contribución más de la
cinemática en el espacio cartesiano, corresponde a planificar los movimientos de un
exoesqueleto, de manera tal que el paciente se vea estimulado sin riesgo de daño
colateral por movimientos excesivos con relación al entorno.

Análisis de Marcha en Pacientes con Hemiplejia desde un punto de vista Bio - Robótico Capítulo 5
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
204
5.7 Referencias
[1]. Perry, J. Gait analysis, normal and pathological function. SLACK Incorporated.
USA, 1992.
[2]. Villa, Adriana, Gutiérrez, Eduardo, Pérez, J. Carlos. Consideraciones para el
análisis de la marcha humana. Técnicas de videogrametría, electromiografía y
dinamometría. Revista Ingeniería Biomédica. Vol. 2, Num. 5. Enero-Junio 2008.
[3]. T N Brown, R M Palmieri-Smith, S G McLean. “Sex and limb differences in hip and
knee kinematics and kinetics during anticipated and unanticipated jump landings:
implications for anterior cruciate ligament injury”. Br J Sports Med 2009;43:1049-
1056 doi:10.1136/bjsm.2008.055954.
[4]. Villalobos, Jorge, Parodi, Alejandro. Estandarización de los valores cinemáticos
en niños sanos. Revista Mexicana de Medicina Física y Rehabilitación. Vol. 17,
Num. 2. Abril - Junio 2005.
[5]. Hincapie G, D. Muñoz R. “Análisis cinemático en la rehabilitación de la marcha de
la marcha del paciente con amputación BK”. Universidad Maunela Beltrán.
Colombia, 2007.
[6]. Broseta, Bertomeu. Contribución del análisis cinético de la marcha a la valoración
de los trastornos del equilibrio. Revista de Biomecánica del Instituto de
Biomecánica de Valencia. 2005
[7]. Davis, Ounpuu, Tyburski and Gage. A gait analysis data collection and reduction
thechnique. Human Movement Science. Vol 10, Octubre1991. Pp 575-587 USA.
[8]. Sinikka H. Peurala. Rehabilitation of Gait in Chronic Stroke Patients. Department of
Neurology Series of Reports No. 74, 2005. University of Kuopio 2005

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 6
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
205
Capítulo 6 Conclusiones y Perspectivas
6.1 Conclusiones
En éste trabajo de tesis se presentó una metodología integral, y su validación
experimental, para el análisis de marcha en pacientes con hemiplejia desde un punto
de vista bio-robótico. Se dieron a conocer los fundamentos médicos que originan la
hemiplejia y las distintas formas de manifestación de acuerdo a la lesión
cerebrovascular, así como una descripción de su etiología, características y evolución.
Se presentaron los requerimientos para la bipedestación como una condición necesaria
para la marcha en el procedimiento de diagnóstico y rehabilitación, derivando con ello a
las técnicas de tratamiento empleadas.
Por otro lado se presentaron las estadísticas mundiales y en nuestro caso,
nacionales que justifican el proponer técnicas de caracterización, diagnóstico y
rehabilitación empleando dispositivos con altas prestaciones tecnológicas, así como la
evaluación de estrategias y algoritmos de planificación y control. Se propuso una
metodología para el análisis de marcha en pacientes con hemiplejia como
consecuencia de un accidente cerebro-vascular (EVC). Como parte de la base del
procedimiento se especificaron aspectos relevantes del ciclo de marcha basados en la
biomecánica normal y las fases que lo componen. Se describieron los planos
anatómicos de análisis (transversal, sagital y coronal), y las estructuras óseas de
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 6
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
206
análisis como pelvis, cadera, rodilla y tobillo para ambas extremidades, así como los
marcos ortonormales constituidos por los ejes de giro, y las fases de oscilación y
apoyo.
Se presentó la cinemática articular y los límites biomecánicos para las
condiciones de marcha normal, de manera tal que sean empleadas como base para
describir las condiciones de un paciente. Se propuso una metodología para evaluación
de marcha, se realiza la descripción de cada componentes, tales como: la selección de
pacientes, la caracterización del ciclo de marcha, el análisis de marcha, la cinemática
de marcha bípeda, el diagnóstico y las condiciones de rehabilitación. Se presentaron
los resultados experimentales correspondientes al análisis de marcha, y se describió la
plataforma de evaluación empleada para la caracterización del ciclo y fases de marcha
en 8 sujetos de estudio (3 personas que se asumen sanas y 5 personas con
discapacidad en la marcha), todas ellas cumpliendo los criterios de inclusión; se dieron
a conocer las características antropométricas de los sujetos de estudio y la
caracterización de marcha con base en gráficos descriptivos de las señales articulares
para flexo-extensión (pelvis, cadera, rodilla y tobillo), rotación (pelvis, cadera y rodilla),
progresión del pie, oblicuidad de pelvis, aducción-abducción de cadera, varo-valgo de
rodilla, parámetros espacio-temporales del ciclo y fases de caminata; referido a los
planos anatómicos (coronal, sagital y transversal).
Se discutieron las gráficas de desempeño en el ciclo de marcha de acuerdo a un
ciclo de marcha normal. El modelo cinemático directo de posición propuesto, permite

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 6
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
207
conocer el desempeño cartesiano de cada articulación con relación a las otras y que
algún modo permite conocer el desempeño en el ciclo de marcha con relación al
entorno.
Sin embargo, y bajo el propósito de diseñar un sistema robótico que permita
corregir los movimientos inadecuados por la existencia de una hemiplejia, en éste
capítulo se presentan las bases del trabajo futuro con relación al diseño final,
construcción y control de movimiento y fuerza de un exoesqueleto de 10 articulaciones
de revolución, para retroalimentar el movimiento en ambas extremidades inferiores con
relación a la estimulación directa en flexo-extensión de cadera, rodilla y tobillo;
pronación-supinación de tobillo/pie y aducción-abducción de cadera; articulaciones que
se asumen más vulnerables, y que de acuerdo a los estudios y análisis de marcha en
los 5 pacientes descritos en el capítulo 4, resulta pertinente un mecanismo de
eslabones articulados con éstas características. Para la obtención de las ecuaciones
cinemáticas y la obtención de las gráficas se desarrollo un programa en Matlab con
librerías de matemática simbólica. La entrada de datos estuvo definida por el
desempeño articular de uno de los sujetos de estudio en condiciones que se asumen
saludables (sano 1).
Este trabajo de tesis tiene el propósito de servir como base científica y de
investigación para contribuir con el diseño de sistemas robóticos complejos de
propósito específico o genérico, y con ello el proponer algoritmos más eficientes en el
diagnóstico y planificación de la tarea de rehabilitación.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 6
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
208
6.2 Perspectivas
El trabajo futuro considerado para este trabajo de investigación es:
1. Realizar la caracterización, emisión gráfica y análisis del ciclo de marcha en una
muestra de mayor amplitud de pacientes y personas sanas con el afán de
garantizar que el procedimiento es estable.
2. Proponer una cadena cinemática para un sistema a 24 grados de libertad y
resolver la caracterización de las 4 estructuras óseas en ambas extremidades.
3. Relacionar la caracterización articular de la plataforma tecnológica empleada en
el CRIT con la formulación Denavit-Hartenberg para garantizar el desempeño
cartesiano, útil en planificación de los sistemas robóticos independientemente
de la configuración y el nivel de complejidad.
4. Desarrollar un sistema de cómputo integral basado en la metodología aquí
propuesta y los algoritmos programados para contar con una emisión de
gráficas y análisis de marcha de manera simultánea.
5. Obtener el modelo dinámico del exoesqueleto propuesto con base en la cadena
cinemática de 24 grados de libertad y considerar las dinámicas de fuerza
inercial, Coriolis, centrípetas, vibraciones mecánicas, fricción compleja y
gravitatorias.
6. Desarrollar un diseño CAD con la cinemática y dinámica del robot exoesqueleto
genérico que resuelva caracterización y rehabilitación programada.
7. Diseñar estrategias de control de movimiento y fuerza para el exoesqueleto
propuesto.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Capítulo 6
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
209
8. Proponer una estrategia de selección de componentes, construcción de
subsistemas e integración de exoesqueleto.
9. Evaluación experimental del exoesqueleto, y análisis de estabilidad, pasividad,
robustez, manipulabilidad y optimización con el operador humano en el lazo de
control.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
211
Glosario
A
Abducción: Movimiento que tiene lugar sobre un plano transverso, durante el cual la zona
distal del pie se desplaza o aleja de la línea media del cuerpo. Si el pie se mantiene en
esta posición se origina un pie abductus o en separación [1].
Adducción: Movimiento sobre un plano transverso, en el que la parte distal del pie e desplaza
o aproxima hacia la línea media del cuerpo. Ocurre sobre un eje vertical de rotación. El
mantenimiento en esta posición da lugar a un pie adductus o en aproximación [1].
Análisis de marcha: El análisis de marcha es la medición, descripción y evaluación
sistemática de los parámetros cinemáticos y cinéticos que caracterizan el movimiento
humano [2].
Arco de movimiento: Es el grado de movilidad que permite una articulación del cuerpo. Varía
de unas personas a otras según sus características individuales (edad, preparación
física) y la presencia de afecciones que disminuyan la capacidad [3].
B
Biomecánica: Conjunto de conocimientos interdisciplinares generados a partir de utilizar, con
el apoyo de otras ciencias biomédicas, los conocimientos de la mecánica y distintas
tecnologías en, primero, el estudio del comportamiento de los sistemas biológicos y,
en particular, del cuerpo humano, y en segundo, en resolver problemas que le
provocan las distintas condiciones a las que puede verse sometido [4].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
212
Biónica: Simbiosis entre los términos “biología” y “técnica”. Describe cómo se utilizan para
aplicaciones técnicas, principios derivados de la biología. Se encarga de descifrar los
“inventos” de la naturaleza y traspasar estas innovaciones a la técnica. Es por tanto
una ciencia interdisciplinaria en la que trabajan conjuntamente biólogos, ingenieros y
diseñadores [5].
Bio-robótica: La bio-Robótica trata de emular las mismas propiedades que a los seres
humanos nos hacen ser autosuficientes. Cada componente de un sistema bio-robótico
pude incorporar el conocimiento de diversas áreas como la fisiología neuromuscular,
biomecánica y la neurociencia por nombrar algunas, para el diseño de sensores,
actuadores, circuitos, procesadores y algoritmos de control [6].
C
Cadena cinemática: Es una serie de eslabones conectados por articulaciones. Cuando cada
uno de los eslabones de una cadena cinemática se acopla a un máximo de otros dos
se denomina cadena cinemática simple [7].
Cinemática: Es la ciencia que trata el movimiento sin considerar las fuerzas que lo
ocasionan. Dentro de la cinemática se estudian la posición, velocidad, aceleración y
todas las derivadas de mayor orden de las variables de posición (respecto al tiempo o
cualquier otra variable). Por ende, se refiere al estudio de las propiedades del
movimiento, las geométricas y las basadas en el tiempo [8].
Cinemática Directa: Para un manipulador determinado, la cinemática directa consiste en
hallar la orientación y posición del efector final a partir del vector de ángulos de las
articulaciones y los parámetros geométricos del elemento [9].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
213
Cinemática Inversa: La cinemática Inversa consiste en encontrar los valores que deben
adoptar las coordenadas articulares de un manipulador para que su extremo se
posicione y oriente según determinada localización espacial [10].
Codificador óptico: Dispositivo óptico digital que convierte el movimiento en una secuencia de
pulsos digitales. Mediante el conteo de un bit o la decodificación de un conjunto de
bits los pulsos pueden convertirse en medidas relativas o absolutas [11].
Configuraciones admisibles: Todas las configuraciones que surgen de las ecuaciones
cinemáticas de movimiento y que son físicamente realizables por el manipulador [12].
Configuraciones singulares: En las configuraciones singulares hay movimientos
infinitesimales que son inalcanzables; es decir, el efector final del manipulador no
puede moverse en ciertas direcciones [12]
Control de movimiento: Es el problema de determinar la evolución temporal
de entradas conjuntas para hacer que el efector final ejecute un movimiento ordenado
[12]
Coordenada cartesiana: Para fijar la posición de un punto en el espacio, se especifican sus
distancias dirigidas a tres planos coordenados mutuamente perpendiculares uno de
ellos horizontal y los otros dos verticales. Esos tres planos se cortan por pares
formando tres ejes coordenados, mutuamente perpendiculares, uno vertical, el eje z,
y los otros dos horizontales: eje x y el eje y. Los planos coordenados se designan por
los ejes que contienen. Así, el plano que contiene al eje x y al eje y se llama plano xy.
El punto de intersección de los ejes es el origen [13].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
214
D
Dinámica: (Del griego dynamis, fuerza, como en “dinamita”). Parte de la mecánica que
describe las posiciones y movimientos de objetos en el espacio como una función del
tiempo considerando las causas fundamentales del movimiento [14].
Dispositivo háptico: Es el enlace entre el operador humano y un ambiente virtual, incluye un
display háptico y algún software requerido para garantizar interacción estable. Una
interfaz háptica transmite una sensación quinestésica de presencia a un operador
humano interactuando con un ambiente generado por computadora [15].
E
Efector final: Es la parte instalada en el extremo de un manipulador. Es equivalente a la
mano humana que manipula a un objeto o que lo sostiene antes de que sea movido
[16].
Enfermedad crónica: Enfermedad caracterizada por la rapidez de acción de su causa
morbígena, la vivacidad de los fenómenos patológicos por los que se manifiesta y la
relativa brevedad de su curso; es crónica la que, aunque se inicie con los caracteres de
agudeza, posteriormente adquiere poca vivacidad en sus manifestaciones patológicas
y relativa lentitud de curso, durante el cual la mejoría o el empeoramiento de las
condiciones del enfermo se suceden con lentitud [17].
Enfermedad degenerativa: Situación patológica que representa el alejamiento de la
normalidad, es decir, se trata de ciertas alteraciones estructurales profundas e
irreversibles de las células y de los tejidos a consecuencia de procesos tóxicos que
comprometen el aporte nutricio de dichas células o tejidos [17].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
215
Eslabón de un robot: Mecánicamente, un robot está formado por una serie de elementos o
“eslabones” unidos mediante articulaciones que permiten un movimiento relativo
entre cada dos eslabones consecutivos [18].
Espacio de trabajo de un robot: Es el volumen de espacio al cual el efector final del
manipulador puede alcanzar [19]
Estadiómetro: es un dispositivo con una medida reglamentaria de 2m X 20cm que se usa
para medir la talla de niños, adolescentes, y adultos
Estrés crónico: estrés causado por situaciones diarias continuas y repetitivas en donde la
persona no es capaz de reaccionar en alguna forma, es decir, cuando el organismo
se encuentra bajo presión continua o en situación de emergencia constante y se
agotan los recursos fisiológicos y psicológicos de defensa del individuo y el estrés
provoca patología [20].
Exoesqueletos: Son sistemas robóticos diseñados para trabajar junto con partes o el cuerpo
humano completo, con el fin de realizar una tarea definida específica y de manera
autónoma.
F
Flexión dorsal: Movimiento que discurre en un plano sagital y durante el cual la zona distal
del pie o parte de él se aproxima a la tibia. Igualmente ocurre sobre un eje bimaleolar
[1].
Flexión plantar: Es el movimiento que discurre en un plano sagital y durante el cual la zona
dorsal del pie, o parte de él, se aleja de la tibia. Ocurre sobre un eje de rotación
transversal (bimaleolar) [1].

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
216
Fricción dinámica: La fuerza de fricción de cada cuerpo es de dirección opuesta a su
movimiento relativo al otro cuerpo. Las fuerzas de fricción se oponen automáticamente
a este movimiento relativo y nunca contribuye a él. Las fuerzas que actúan entre
superficies en movimiento relativo se llaman fuerzas de fricción dinámica [21].
Fuerza centrípeta: Las fuerzas responsables del movimiento circular uniforme se llaman
fuerzas centrípetas porque están dirigidas hacia el centro del movimiento circular.
Fuerza de Coriolis. Ella "se siente" pero en realidad NO es una FUERZA REAL ya que no
efectúa trabajo. Esta "fuerza" produce una aceleración sobre los objetos que se
mueven en un sistema en rotación. Por ejemplo, sobre los aviones que viajan de uno a
otro lugar de la Tierra, sobre un misil arrojado desde algún lugar, sobre el aire de la
atmósfera y el agua de los océanos inclusive [22].
G
Generador taquimétrico: Los denominados tacogeneradores o tacómetros de alterna son
similares, en su fundamento, a un generador de energía eléctrica [23]
Goniómetro: es un instrumento de medición que se utiliza para medir ángulos, comprobación
de conos y puesta a punto de las máquinas-herramientas de los talleres de
mecanizado. Este tipo de goniómetro consta de un círculo graduado en 360º, el cual
lleva incorporado un dial giratorio sobre su eje de simetría, para poder medir cualquier
valor angular. El dial giratorio lleva incorporado un nonio para medidas de precisión
[24].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
217
I
Inercia: Es la tendencia de un cuerpo a permanecer en reposo o movimiento lineal uniforme.
Se considera a la propiedad de un elemento de almacenar energía cinética del
movimiento de rotación [25].
M
Marcha bípeda: La marcha bípeda es la forma de desplazamiento característica del hombre,
que la diferencia del resto de especies animales. Cada individuo tiene una forma
peculiar de caminar y correr e incluso se puede identificar a una persona por su
manera de andar o por el sonido de sus pasos [26].
Matriz de transformación homogénea: Se define como matriz de transformación homogénea
T a una matriz de dimensión 4 X 4 que representa la transformación de un vector de
coordenadas homogéneas de un sistema de coordenadas a otro [27].
Modelo cinemático de un robot: La cinemática del robot estudia el movimiento del mismo con
respecto a un sistema de referencia. Así, la cinemática se interesa por la descripción
analítica del movimiento espacial de un robot como una función del tiempo, y en
particular por las relaciones entre la posición y la orientación del extremo final del
robot con los valores que toman sus coordenadas articulares [28]

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
218
Momento de inercia: La cantidad inercial que tiene en cuenta la distribución de la masa de un
cuerpo. Al momento de inercia también se le conoce como inercia de la rotacional
[29]
N
Neurorehabilitación: La neurorehabilitación es un área de la investigación clínica que está
definida por su objetivo como: La restauración de las funciones que han sido
perdidas después de enfermedades o lesiones del sistema nervioso. El campo se
extiende desde una lesión neuronal hasta la recuperación funcional y abarca un
amplio espectro de información científica y especialidades médicas [30].
O
Órtesis: es la combinación e integración, entre las partes del cuerpo y una pieza de
ingeniería, donde el resultado de esa integración es una unidad que obedece las
leyes de la física y logra efectos o beneficios biomecánicos.
Órtesis activas: mecanismo estructural externo, acoplado a la persona y cuyas junturas y
eslabones corresponden a las de la parte del cuerpo humano que emula.
Ortensis pasiva: es un mecanismo estructural, acoplado al cuerpo y cuya función es
inmovilizar o estabilizar una parte del cuerpo que emulan
P
Par generalizado: Se dice que dos fuerzas f y –f que tienen la misma magnitud, líneas de
acción paralelas y sentidos opuestos forman un par. Obviamente, la suma de las
componentes de las dos fuerzas en cualquier dirección es igual a cero. Sin embargo,
la suma de los momentos de las dos fuerzas con respecto a un punto dado no es
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
219
cero. Aunque las dos fuerzas no generaran un traslación del cuerpo sobre el que
están actuando estas si tenderán a hacerlo rotar [31]
Parámetros cinematicos: los parámetros cinematicos son los valores tomados para analizar o
valorar una situación en le contextos de movimiento permitido por un cuerpo
Parámetros Denavit-Hartenverg: Una convención de uso común para la selección de marcos
de referencia en aplicaciones de robótica es la convención de Denavit-Hartenberg, o
convención DH. En esta convención, cada transformación homogénea es
representada como el producto de cuatro transformaciones básicas en las que las 4
cantidades son los “parámetros de Denavit Hartenverg” asociados a cada eslabón y
articulación.
Parámetros espacio-temporales: son los valores tomados para la comparación de datos
analizados que implican una posición espacial y un tiempo transcurrido.
Patología: Parte de la medicina que estudia la naturaleza de las enfermedades,
especialmente de los cambios estructurales y funcionales de los tejidos y órganos
que la causan [32].
Patrón de marcha: Serie de movimientos alternantes y rítmicos de las extremidades y del
tronco, que determinan un desplazamiento hacia delante del centro de gravedad con
un mínimo gasto de energía.
Patrón de marcha patológico: son el conjunto de movimientos que utiliza una persona con
algún tipo de patología al momento de desplazarse
Pelvímetro: Sustantivo masculino Instrumento utilizado en obstetricia para medir los
diámetros pélvicos y su capacidad [33]
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
220
Plasticidad cerebral: La plasticidad cerebral se refiere a la capacidad adaptativa del sistema
nervioso central para disminuir los efectos de lesiones, a través de cambios que
modifican la estructura y la función, tanto en el medio interno como en el externo.
En los adultos la plasticidad cerebral es menor comparada con la de los niños, sin embargo,
los cambios plásticos ocurren a cualquier edad y las ganancias funcionales
continúan por años después de la lesión. La plasticidad incluye también cambios en
la estructura, distribución y número de sinapsis, mecanismo donde yace la formación
de la memoria a largo plazo [34].
Potencia mecánica: La potencia mecánica se define como la rapidez con que se realiza un
trabajo. Se mide en watts (W) y se dice que existe una potencia mecánica de un watt
cuando se realiza un trabajo de un joule por segundo [35]
Pronación: También se efectúa sobre 3 planos y consiste en el desplazamiento simultáneo
del pie en flexión dorsal, eversión y abducción [1]
Prótesis: Es la sustitución de una parte corporal anatómicamente perdida (amputación) o
funcionalmente inutilizable, con aparatos artificiales que suplen su funcionalismo
específico.
R
Robot: Manipulador reprogramable multifuncional, diseñado para mover material, partes,
herramientas o dispositivos especializados mediante movimientos programados
variables para la ejecución de tareas diversas [36].
Robótica: Ciencia que estudia los robots como sistemas que operan en algún entorno real,
estableciendo algún tipo de conexión inteligente entre percepción y acción [37].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
221
Robótica asistencial: es el área de la robótica que se especializa en el diseño y desarrollo de
equipos que interactúan directamente con el individuo para su rehabilitación, bien
sea por la pérdida de capacidad en la movilidad de sus miembros o bien por la
pérdida física de uno más de ellos [38].
S
Sinérgico: se emplea para una forma de interacción medicamentosa que da como resultado
efectos combinados o aditivos con la administración de dos o más fármacos, que
resultan ser mayores que aquellos que podrían haberse alcanzado si alguno de los
medicamentos se hubiera administrado solo.
Sistema robótico: Aquel que es capaz de recibir información, de comprender su entorno a
través del empleo de modelos, de formular y de ejecutar planes, y de controlar o
supervisar su operación [39].
Supinación: Se efectúa sobre 3 planos y consiste en el desplazamiento simultáneo del pie en
flexión plantar, inversión y aducción [1]
T
Tecnología asistencial: Es la utilización de cualquier parte de un equipo o sistema productivo
modificado o comercializado, para incrementar o mejorar capacidades funcionales
de un individuo. (Ley pública de los Estados Unidos 100-407). Vista también como
una serie de aparatos, estrategias y/o servicios, que ayudan al individuo a realizar
mejor una actividad; en consecuencia, incluye desde la baja tecnología, que es poco
costosa, hasta la alta tecnología, que es costosa y con productos de compleja
fabricación [40].
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
222
Tecnología en rehabilitación: Conjunto de productos y conocimientos desarrollados desde
avances tanto en la ingeniería de la rehabilitación como en las profesiones y
disciplinas que estudian el fenómeno de la discapacidad [41].
Tecnologías de ayuda: Todos aquellos aparatos, utensilios, herramientas, programas de
computadora o servicios de apoyo que tienen como objetivo incrementar las
capacidades de las personas que por cualquier circunstancia no alcanzan los niveles
medios de ejecución que por su edad y sexo le corresponderían en relación con la
población normal [42].
Tono muscular: Se define como la tensión permanente, involuntaria y variable que presentan
todos y cada uno de los músculos del cuerpo y que varía por la postura y acciones
sincinéticas [43].
Trayectoria de un robot: Es el que describe los movimientos deseados de un manipulador y
refiere al historial de posición, velocidad y aceleración de cada grado de libertad [44]
Referencias
[1]. JESÚS MUÑOZ “deformaciones del pie” Departamento de Cirugía Ortopédica y
Traumatología. Hospital Infantil Universitario Niño Jesús. Madrid. España.
[2]. L. Henao, A. Manzanera y E. Romero. “Extracción y seguimiento de los miembros
inferiores sin marcadores”. VI Seminario Internacional de Procesamiento y Análisis de
Imágenes Médicas. SIPAIM 2010. Universidad Nacional de Colombia, Bogotá, 2010.
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
223
[3]. Pérez. Auxiliar de enfermería. Bloque III. Procedimientos relacionados con las
necesidades de movimiento y actividad física. Cap. 5: Sistema esquelético-muscular.
Procedimientos relacionados. Ed. McGraw Hill. P. 94. ISBN: 8448169158
[4]. Instituto Biomecánico de Valencia, 1992
[5]. El futuro está en la naturaleza: Biónica-el cofre tecnológico del tesoro. Claas Vision. The
Magazine for Harvesting Specialists. No. 25. Pp. 3-9.
http://www.claas.com/countries/generator/cl-pw/es/services/claas-
vision/archiv/vision25,lang=es_SA.pdf
[6]. F. García-Córdova, J. Molina-Villaplana, J. Mulero-Martínez, J. Feliu-Batlle, A. Guerrero-
González, R.J. Saltarén-Pazmiño, y J. Calabozo-Morán. Emulación del sistema
musculo-esqueletal y el control de movimiento en una plataforma experimental.
Universidad de León. España.
[7]. Introducción a la robótica. Subir Kumar Saha. Editorial Mc Graw Hill. 2010.
[8]. Johon. J. Craig, Robótica, tercera ed., Prentice Hall. México, 2006. ISBN: 970-26-0772-8
[9]. L. Felipe Giraldo, E. Delgado y G. Castellanos. Cinemática inversa de un brazo robot
utilizando algoritmos genéticos. Universidad Nacional de Colombia. Colombia, 2006.
ISSN: 1657–7663
[10]. Barrientos, Peñín et. al. Fundamentos de Robótica. Ed. McGrawHill.
[11]. Introducción a la robótica. Subir Kumar Saha. Editorial Mc Graw Hill. 2010.
[12]. Robot Modeling and Control. Mark W. Spong, Seth Hutchinson, M. Vidyasagar. Editorial
John Wiley and Sons.
[13]. Geometría Analítica. Frederick H. Steen, Ph. D., Donald H. Ballou, Ph. D. Editorial
Publicaciones Cultural. Vigésima tercera reimpresión México, 1999.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
224
[14]. Física Vol. 1. Cuarta edición (tercera en español). Robert Resnick, David Halliday,
Kenneth S. Krane. Compañía Editorial Continental. Décima segunda reimpresión en
México, 2001.
[15]. A Two-Port Framework for the Desing of Unconditionally Stable Haptic Interfaces.
Richard J. Adams, Blake Hannaford. Department of Electrical Engineering, University of
Washington. Procceding of the 1998 IEEE/RSJ. Intl. Conference on Intelligent Robots
and Systems Victoria, B.C., Canda. October 1998. pp 1254-1259.
[16]. Introducción a la robótica. Subir Kumar Saha. Editorial Mc Graw Hill. 2010.
[17]. Segatore, Luigi Col. Gianangelo Poli. “Diccionario médico Teide”. Traductor Dr. Rafael
Ruiz Lara. 5a edición. Barcelona, 1975. Editorial Taide. (Diccionarios Teide tomo I).
[18]. Fundamentos de Robótica. Antonio Barrientos, Luis Felipe Peñin, Carlos Balaguer,
Rafael Aracil. Editorial Mc Graw Hill. Madrid 1997.
[19]. Introduction to Robotics Mechanic and Control. Segunda edición. John J. Craing.
Editorial Addison Wesley Longman. 1989.
[20]. De Luca P.A., Sánchez A. M. E., et al. “Medición integral del estrés crónico”. Revista
Mexicana de Ingeniería Biomédica. Vol. 25, Num. 1 2004
[21]. Física Vol. 1. Cuarta edición (tercera en español). Robert Resnick, David Halliday,
Kenneth S. Krane. Compañía Editorial Continental. Décima segunda reimpresión en
México, 2001.
[22]. http://tallex.at.fcen.uba.ar/index_archivos/page0014.htm
[23]. Ramón Fallas Arenyng. Sensores y Acondicionadores de señal. Cuarta edición. Editorial
Marcombo S.A. Barcelona España, 2003.
[24]. http://goniometro.galeon.com/
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
225
[25]. Sistemas de Control Automático. Séptima edición. Benjamin C. Kuo. Editorial Prentice
Hall. 1996.
[26]. S. Collado Vázquez, F. Pascual Gómez, et. Al. “Análisis de la marcha. Factores
Moduladores”. Biociencias. Revista de la Facultad de Ciencias de la Salud. Universidad
Alfonso X el Sabio. Vol. 1, año 2003
[27]. Mecánica Vectorial para Ingenieros. Ferdinan P. Beer, E. Russell Johnston Jr., Eliot R.
Eisenberg. Octava edición. Editorial Mc Graw Hill. México D.F. 2007.
[28]. Fundamentos de Robótica. Antonio Barrientos, Luis Felipe Peñin, Carlos Balaguer,
Rafael Aracil. Editorial Mc Graw Hill. Madrid 1997.
[29]. Física Vol. 1. Cuarta edición (tercera en español). Robert Resnick, David Halliday,
Kenneth S. Krane. Compañía Editorial Continental. Décima segunda reimpresión en
México, 2001.
[30]. Michael E. Selzer, et. Al. Neural Repair and Rehabilitation. Cambridge University Press,
2006. ISBN: 978 0 521 83639 5
[31]. Mecánica Vectorial para Ingenieros. Ferdinan P. Beer, E. Russell Johnston Jr., Eliot R.
Eisenberg. Octava edición. Editorial Mc Graw Hill. México D.F. 2007.
[32]. Diccionario Manual de la Lengua Española Vox. 2007 Larousse Editorial, S.L.
[33]. salud.doctissimo.es/diccionario-medico/pelvimetro.html
[34]. Galaburda AM. Introduction to special issue: Developmental plasticity and recovery of
function. Neuropsychologia 1990;28:515-516.
[35]. www.itescam.edu.mx/principal/sylabus/fpdb/recursos/r27118.PPT
[36]. Robot Industries Association (RIA)
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Glosario
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
226
[37]. El futuro está en la naturaleza: Biónica-el cofre tecnológico del tesoro. Claas Vision. The
Magazine for Harvesting Specialists. No. 25. Pp. 3-9.
http://www.claas.com/countries/generator/cl-pw/es/services/claas-
vision/archiv/vision25,lang=es_SA.pdf
[38]. http://robotha.com/
[39]. http://www.ovaliente.com.ar/perso/robot/definamo.htm
[40]. Instituto Biomecánico de Valencia, 1992
[41]. Martín M. Matheus, A. Rios Rincón. La Tecnología en rehabilitación: una aproximación
conceptual. Revista Ciencias de la Salud. Bogotá, Colombia. 4 (2):98-108. 2006
[42]. Alcantud M, Francisco. Tecnologías de ayuda: un modelo de intervención. Unidad de
Investigación ACCESO. Universidad de Valencia. España
[43]. Farreras Rozman . Medicina Interna. Tomo1. Editorial Marín. 9ª edición Barcelona,
1978.
[44]. Introduction to Robotics Mechanic and Control. Segunda edición. John J. Craing.
Editorial Addison Wesley Longman. 1989.Please wait
Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
227
Apéndice A Encuesta para pacientes con
Hemiplejia y médicos especialistas en el área de neurorehabilitación

Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
228
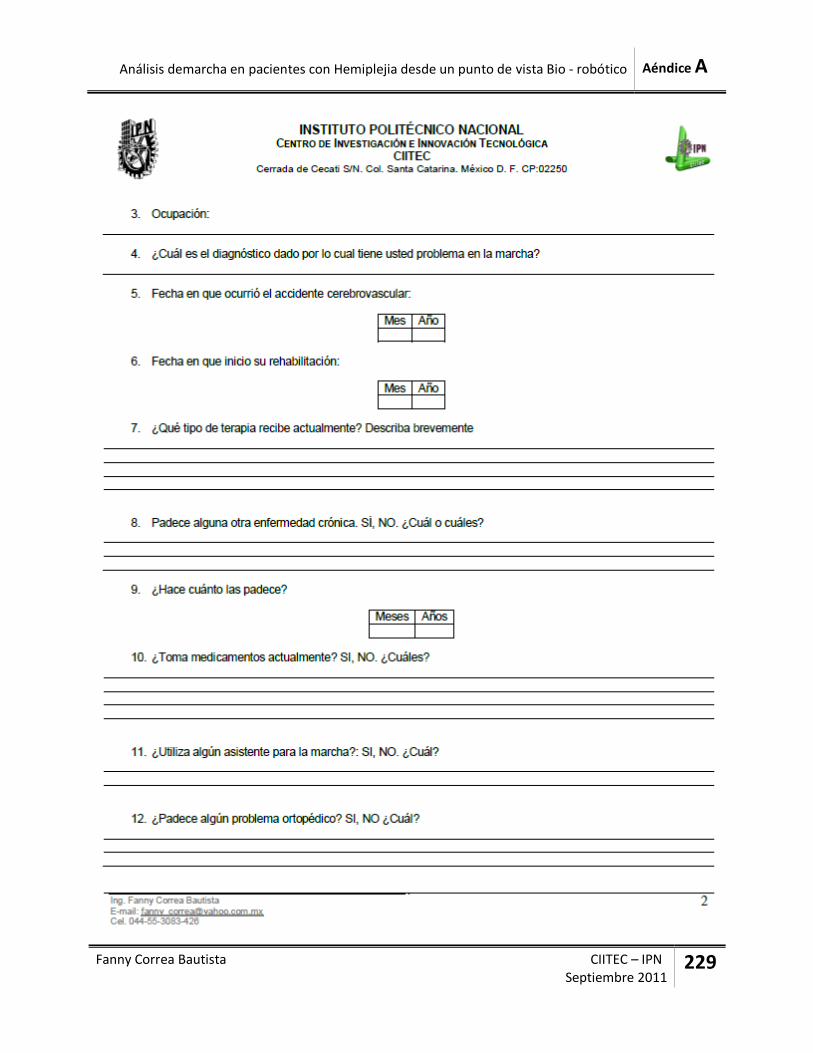
Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
229

Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
230
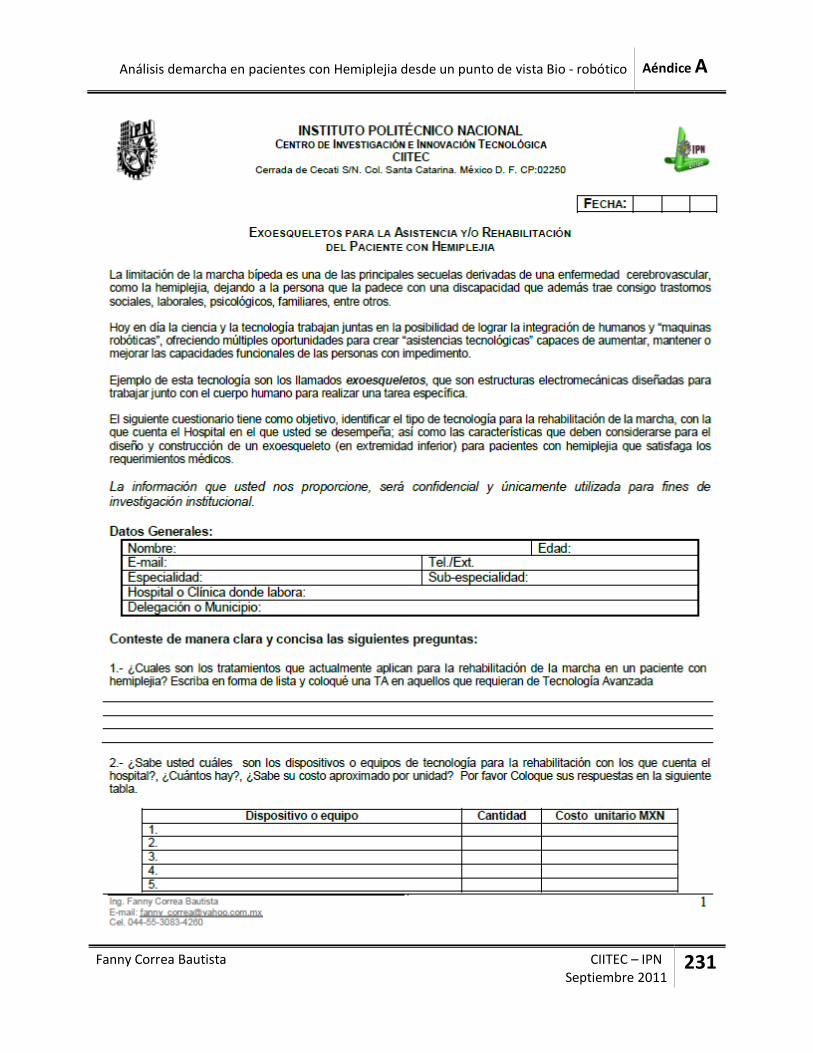
Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
231
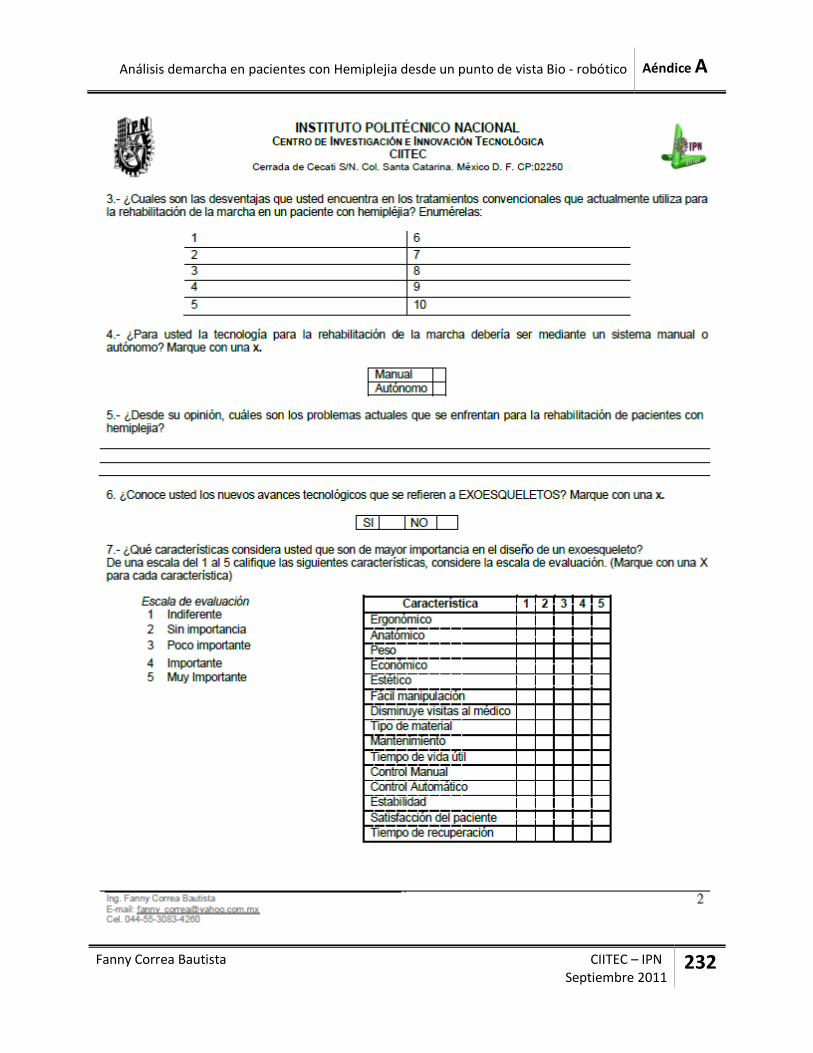
Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
232

Análisis demarcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Aéndice A
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
233

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
235
Apéndice B Protocolo de investigación
para ingresar al CRIT Estado de México

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
236
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
237

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
238
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
239

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
240
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
241
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
242
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
243
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
244
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice B
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
245
Nota: El mismo protocolo de investigación fue empleado para ingresar a la Unidad de Medicina Física del
IMSS.

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice C
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
247
Apéndice C Formato de consentimiento informado para pacientes
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice C
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
248

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice C
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
249
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice C
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
250
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice D
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
251
Apéndice D Algoritmos
Algoritmo 1: Gráficas de ciclo de marcha normal y patológico.
Los algoritmos para obtener las gráficas que describen el movimiento articular
de las estructuras óseas en la extremidad inferior de cada sujeto en estudio, mostradas
en el capítulo 3 y 4, son:
Para personas sanas Para pacientes
Sana 1: Orlando_K01.m
Sana 2: Israel_K02.m
Sana 3: Andres_K03.m
Paciente 1: Oscar_K1.m
Paciente 2: Emilio_K2.m
Paciente 3: JoseLuis_K3.m
Paciente 4: July_K4.m
Paciente 5: Refugio_K5.m
A lo largo del trabajo de tesis, se usan como referencia para los sujetos de
estudio como: Para personas sanas: Sana1, Sana2 y Sana3; y para pacientes como:
Paciente1, Paciente2, Paciente3, Paciente 4 y Paciente5.
Algoritmo 2: Comparación del ciclo de marcha normal y patológico.
Los algoritmos para obtener las gráficas que describen el movimiento articular
de las estructuras óseas en la extremidad inferior durante el ciclo de marcha patológico,
comparado con el de marcha normal que se encuentran en el capítulo 4 son:
NOR_PAT01.m, NOR_PAT02.m, NOR_PAT03.m, NOR_PAT04.m y NOR_PAT05.m
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice D
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
252
Algoritmo 3: Gráficas de barras para parámetros espacio-temporales.
Las gráficas que representan los parámetros espacio-temporales de los 8
sujetos de estudio durante el ciclo de marcha, que se muestran en el Capítulo 4 se
obtienen con el programa: P_ET.m
Algoritmo 4: Amplitud articular de pelvis, cadera, rodilla y tobillo proyectadas
sobre los 3 planos anatómicos coronal, sagital y transversal respectivamente.
En el Capítulo 3 y 4 se muestran las tablas 4.9 y 4.10 con los valores de la
amplitud angular para cada estructura ósea de las extremidades inferiores de los 8
sujetos de estudio durante el ciclo de marcha, proyectados sobre los 3 planos
anatómicos. El programa MAX_MIN.m muestra como resultado 2 matrices (para
extremidad derecha e izquierda respectivamente) cuyos elementos son los valores
máximos y mínimos en los que se mueve articularmente la pelvis, cadera, rodilla y
tobillo durante el ciclo de marcha, así como la amplitud total para cada uno en los 3
planos anatómicos. Se da la opción de seleccionar el número de persona de la cual se
desean obtener los datos.
Algoritmo 5: Matrices elementales y matrices de transformación homogénea.
En el Capítulo 5 se muestran las matrices elementales y matrices de
transformación homogénea que se obtienen de acuerdo a los parámetros D-H de la
tabla 5.1. El programa que hace el cálculo para obtener dichas matrices se encuentra
en la carpeta de Algoritmos con el nombre de: MTH_gait.m
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice D
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
253
Algoritmo 6: Gráficas del Modelo Cinemático Directo de Posición.
Por último, las gráficas que se presentan en el Capítulo 5 del Modelo Cinemático
Directo de Posición para cada marco ortonormal de la cadena cinemática mostrada en
la Figura 5.2 se obtienen mediante el programa: MCDP.m

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
255
Apéndice E Equipo de caracterización de la marcha en el CRIT
Estado de México Datos generales
Análisis de movimiento integrado
El movimiento humano surge de procesamiento de señales complejo controlado
por el sistema nervioso central. Análisis de la marcha por lo tanto, implica la
investigación de muchos factores y realizar un análisis de correlación de los parámetros
de mioneural y biomecánicos. BTS tecnología utiliza un sistema dedicado integrado
para llevar a cabo un análisis triple y simultánea sincronizado cinemática, cinética y
electromiográfica en cualquier momento. El objetivo es mejorar y facilitar la evaluación
de diagnóstico con datos digitales, que apoya al médico en la optimización de la
selección del tratamiento del paciente y constituye un instrumento para la evaluación de
la eficacia del tratamiento aplicado en función del tiempo.
Cinemática - opto electrónicos movimiento de sistemas de captura y análisis
El sistema opto electrónico se compone de cámaras con iluminadores y
sensores CCD para la radiación infrarroja. Los marcadores de posición sobre el tema
están cubiertos con una capa reflectora. Su reflexión, convenientemente procesada,
proporciona las coordenadas tridimensionales de cada punto. Al integrar estos datos
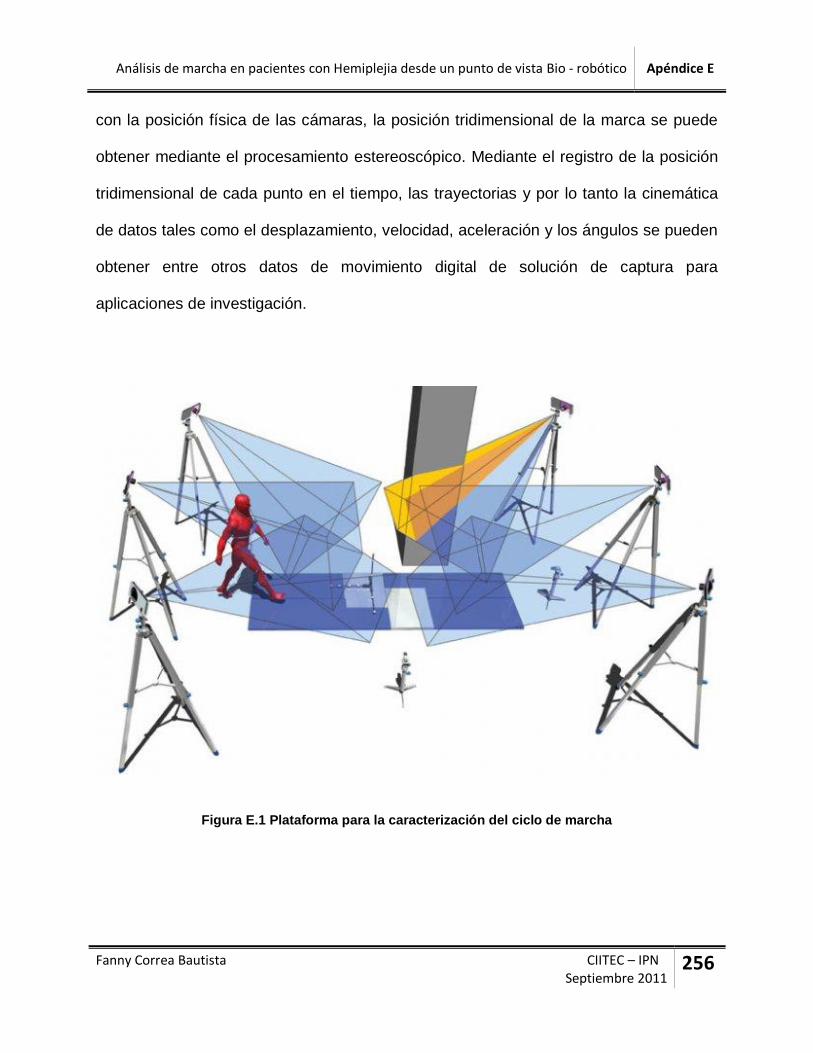
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
256
con la posición física de las cámaras, la posición tridimensional de la marca se puede
obtener mediante el procesamiento estereoscópico. Mediante el registro de la posición
tridimensional de cada punto en el tiempo, las trayectorias y por lo tanto la cinemática
de datos tales como el desplazamiento, velocidad, aceleración y los ángulos se pueden
obtener entre otros datos de movimiento digital de solución de captura para
aplicaciones de investigación.
Figura E.1 Plataforma para la caracterización del ciclo de marcha
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
257
Cinética - plataformas de fuerza
Las fuerzas de reacción del suelo se puede medir con plataformas de fuerza. La
fuerza medida, junto con el análisis cinemático, permiten el estudio de los momentos y
los poderes de articulaciones específicas. Las plataformas de fuerza están equipadas
con sensores que detectan las fuerzas que actúan cuando el sujeto golpea el suelo.
Las fuerzas se analizan en los tres planos principales, divididos en los componentes
coronal, sagital y transversal. Los sensores utilizados son generalmente cepa
dispositivos piezoeléctricos o calibre, que le aportan, convenientemente alimentados,
en una señal eléctrica que varía proporcionalmente al peso aplicado. Las fuerzas
medidas, junto con la cinemática de datos permiten el cálculo de los momentos
articulares y poderes. BTS sistemas de apoyo y la integración con plataformas de
fuerza de AMTI, Bertec y Kistler.
Electromiografía
El análisis de EMG es la representación eléctrica de la contracción muscular.
Las fibras musculares, excitado por el impulso del sistema nervioso a través de la placa
del motor, del contrato. Si dos electrodos bipolares se aplican sobre la superficie de la
piel, una variación de la distribución de potencial de voltaje se puede detectar durante
la contracción muscular. Mediante el registro de esta variación, se obtiene una señal
que representa la actividad muscular en función del movimiento que se realiza.
Utilizando electrodos de superficie simplifica considerablemente la detección de la
señal y, junto con la técnica no invasiva utilizada, permite la grabación de un esfuerzo
tanto estático como dinámico, por ejemplo, cuando los ejercicios o gestos funcionales
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
258
se ejecutan. Los datos obtenidos sobre el estado de activación muscular puede ser
analizada (momento de la activación, la duración y, dentro de límites precisos, la
intensidad). Particularmente adecuado para análisis de la marcha, sino que también
proporciona datos útiles sobre los procesos del sistema nervioso central que controlan
el movimiento de la extremidad superior.
El análisis de video
De hasta cuatro cámaras de vídeo permite capturar los datos de vídeo de un
tema desde diferentes ángulos. Las cámaras se integran en el conjunto del sistema y
los datos se recogen de forma sincrónica con las señales analógicas y cinemática.
Complementarios para el análisis cinemático, las grabaciones de vídeo del movimiento
proporcionar datos cualitativos que apoya la evaluación clínica global. A pesar de que
no proporciona datos numéricos, es útil para la observación repetida de que el paciente
por el médico, para documentar el progreso en el tratamiento y para mejorar la
educación de los pacientes al ver los cambios.
BTS GAITLAB
BTS ha equipado e instalado muchos laboratorios clínicos y de investigación con
las soluciones integradas de análisis de movimiento en todo el mundo. Su experiencia
se encuentra específicamente en el campo clínico y fue adquirida a través de una
estrecha colaboración con los médicos y los investigadores.
El análisis del movimiento instrumentales permite cuantificar problemas de la
marcha y la postura, anomalías en la carga y el déficit muscular, el apoyo a los médicos
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
259
en la decisión de que es el mejor tratamiento a aplicar (cirugía, terapia física y / o
tratamiento farmacológico) para reducir los trastornos motores y mejorar el paciente
calidad de vida.
Es una ayuda esencial en la evaluación funcional del paciente y el seguimiento,
como la decisión correcta se puede hacer en mediciones objetivas. Clínica Análisis de
la marcha es una práctica reconocida diaria, basada en protocolos estándares
validados internacionalmente para las diferentes evaluaciones de la patología en
adultos y los niños.
BTS ofrece una solución completa e integrada para el análisis de la marcha y el
análisis de la postura, concebido para mejorar la productividad del laboratorio de
conducir al usuario en la adquisición de datos, proceso de elaboración e impresión del
informe de una manera muy amable.
Software (BTS SMART-Clinic)
SMART-Clinic es una herramienta amigable de usuario avanzado y diseñado
para una evaluación simultánea, integral y objetiva de los parámetros neuromusculares
y biomecánica del paciente, incluyendo el análisis de varios segmentos del cuerpo:
caminar, alcanzar, señalando, agarrar, el comportamiento postural, etc
SMART -Clinic permite al usuario evaluar en tiempo real toda la información integrada y
sincronizada para obtener un informe basado en datos objetivos.
SMART-Clinic es la ayuda perfecta de diagnóstico para planificar la cirugía ortopédica,
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
260
para validar la terapia farmacológica o la rehabilitación y para seleccionar la mejor
órtesis del paciente.
BTS SMART-Clinic es una herramienta de software para BTS SMART-D.
De análisis de movimiento completamente integrada con los datos de cinemática,
cinética, electromiográficos y pedal, así como la elaboración y reporte de eventos
cíclicos, tales como caminar fases en el caso del análisis de la marcha.
BTS de calibración bar THOR2 base para un sistema de rápida configuración,
incluso con obstáculos en el campo de visión.
Seguimiento automático de cinemática.
Marcador de colocación de acuerdo con protocolos internacionalmente
reconocidos: DAVIS, Helen Hayes, RAB, de cordero, modelo de Oxford pie, etc
Varios protocolos de análisis para el análisis del movimiento de los diferentes
segmentos corporales están disponibles.
Base de datos para la gestión de los ensayos y las sesiones de los pacientes y la
generación de informes clínicos.
Estadísticas de los pacientes de bases de datos: la base de datos del paciente se
pueden consultar de acuerdo a diversos criterios como la edad, sexo, grupos de
patología, la marcha o el día de análisis de movimiento de prueba. Las consultas
se pueden ejecutar en la pantalla de interfaz de usuario gráfica o impresa en
formato PDF.
Gráficos e informes personalizables
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice E
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
261
Análisis automático de los parámetros que describen el ciclo de movimiento (por
ejemplo, andar, y los parámetros relacionados tales como el calendario de
zancada, cadencia, la postura y el swing de tiempo, etc.)
Comparación entre las sesiones, las patologías, las extremidades derecha e
izquierda se normalizaron con respecto a la duración del ciclo de la prueba
relativa.
Cálculo de los ángulos de las articulaciones como flexo-extensión, abducción-
aducción, rotación interna-externa y la relativa normalización.
Filtrado de variables lineales y angulares utilizando técnicas adaptativas con el fin
de identificar a la banda óptimo, sin pérdida o corrupción del archivo de origen.
Datos de la plataforma trazado (la reacción del vector, la COP, el par).
Cálculo de los momentos conjunta y el poder y la relativa normalización.
Integración sincronizada de la información de vídeo detectados por BTS Sistema
VIXTA.
Informe configurable, en formato HTML, para facilitar el intercambio y la consulta a
través de Internet. Se refiere a análisis de la marcha, hay plantillas disponibles
informe basado en las recomendaciones publicadas internacionalmente (por
ejemplo, ref. "El tratamiento de los problemas de la marcha en la parálisis
cerebral", Gage James R., 2004).
Exportación de datos en formato Excel y formato de texto (ASCII).
El software incluye datos normativos de los tipos de movimientos diferentes,
divididas en categoría adultos y niños.

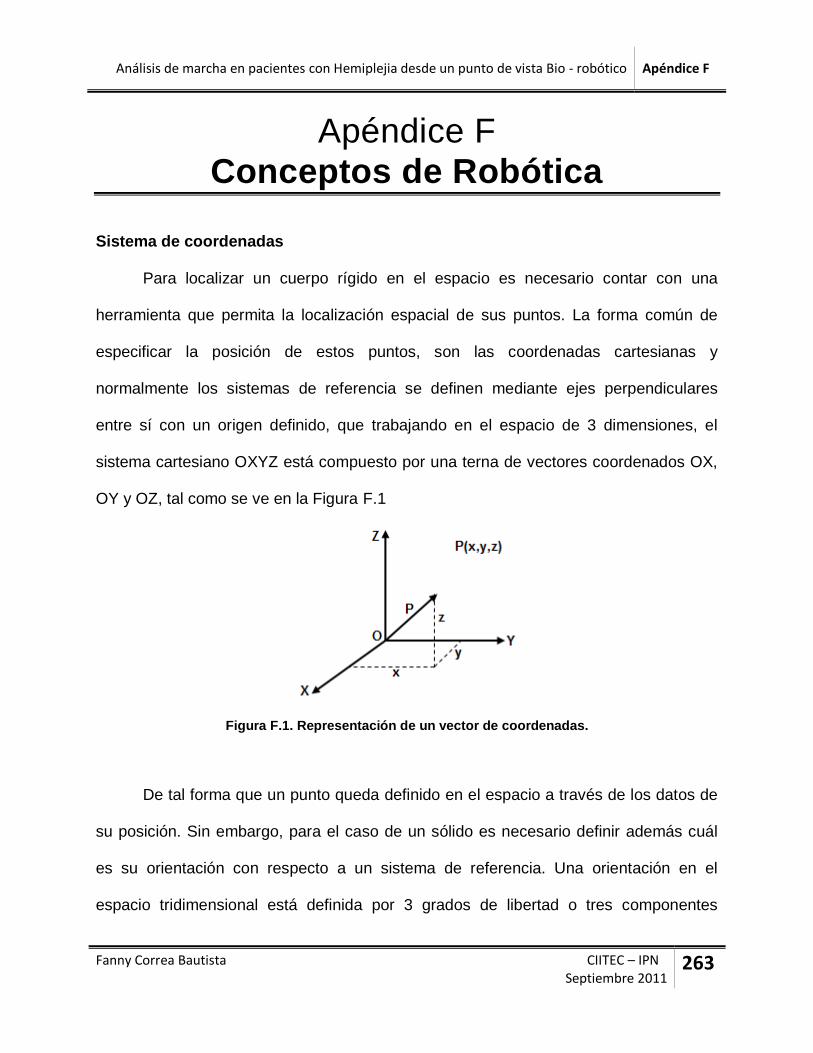
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
263
Apéndice F Conceptos de Robótica
Sistema de coordenadas
Para localizar un cuerpo rígido en el espacio es necesario contar con una
herramienta que permita la localización espacial de sus puntos. La forma común de
especificar la posición de estos puntos, son las coordenadas cartesianas y
normalmente los sistemas de referencia se definen mediante ejes perpendiculares
entre sí con un origen definido, que trabajando en el espacio de 3 dimensiones, el
sistema cartesiano OXYZ está compuesto por una terna de vectores coordenados OX,
OY y OZ, tal como se ve en la Figura F.1
Figura F.1. Representación de un vector de coordenadas.
De tal forma que un punto queda definido en el espacio a través de los datos de
su posición. Sin embargo, para el caso de un sólido es necesario definir además cuál
es su orientación con respecto a un sistema de referencia. Una orientación en el
espacio tridimensional está definida por 3 grados de libertad o tres componentes

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
264
linealmente independientes. Por lo tanto, es habitual asignar al objeto un nuevo
sistema, y después estudiar la relación espacial existente entre los dos.
Coordenadas y matrices homogéneas
La representación mediante coordenadas homogéneas de la localización de
sólidos en un espacio n-dimensional se realiza a través de coordenadas en un espacio
(n+1)-dimensional. Es decir, un espacio n-dimensional se encuentra representado en
coordenadas homogéneas por (n+1) dimensiones, de tal forma que un vector p(x,y,z)
vendrá representado por p(wx, wy, wz), donde w tiene un valor arbitrario y representa
un factor de escala. De forma general, un vector p=ai + bj + ck, donde i, j y k son los
vectores unitarios de los ejes OX, OY y OZ del sistema de referencia de la Figura F.1,
se representa en coordenadas homogéneas mediante el vector columna:
(EC. 1)
A partir de esta definición surge de inmediato el concepto de matriz de
transformación homogénea T, es una matriz de dimensión 4 x 4 que representa la
transformación de un vector de coordenadas homogéneas de un sistema de
coordenadas a otro.
(EC. 2)

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
265
Es posible considerar que una matriz homogénea está compuesta por cuatro
submatrices de diferente tamaño: una submatríz R3x3 que corresponde a una matriz de
rotación; una submatríz p3x1 que corresponde al vector de traslación; una submatríz f1x3
que representa una transformación de perspectiva, y una submatríz w1x1 que
representa el escalado global. Sin embargo, casi siempre solo interesa conocer el valor
de R3x3 y de p3x1, considerándose las componentes de f1x3 nulas y las de w1x1 la unidad.
Haciendo una simplificación a la ec. La matriz T se deduce:
(EC. 3)
Cinemática
La cinemática, está definida como el estudio del movimiento de partículas y
cuerpos sin tomar en cuenta las fuerzas que lo generan. Y dentro de la Robótica, la
cinemática se divide en cinemática directa, inversa y diferencial.
Ahora bien, la diferencia entre cinemática directa e inversa radica en que la
primera permite determinar la posición y orientación de lo que se conoce como “efector
final” en un manipulador robótico, que en este caso, estaremos refiriéndonos a la
posición del pie a partir de los valores de las coordenadas articulares, mientras que en
la cinemática inversa, se determinarán los valores de dichas coordenadas, a partir de la
posición y orientación en coordenadas cartesianas. Ver Figura F.2.
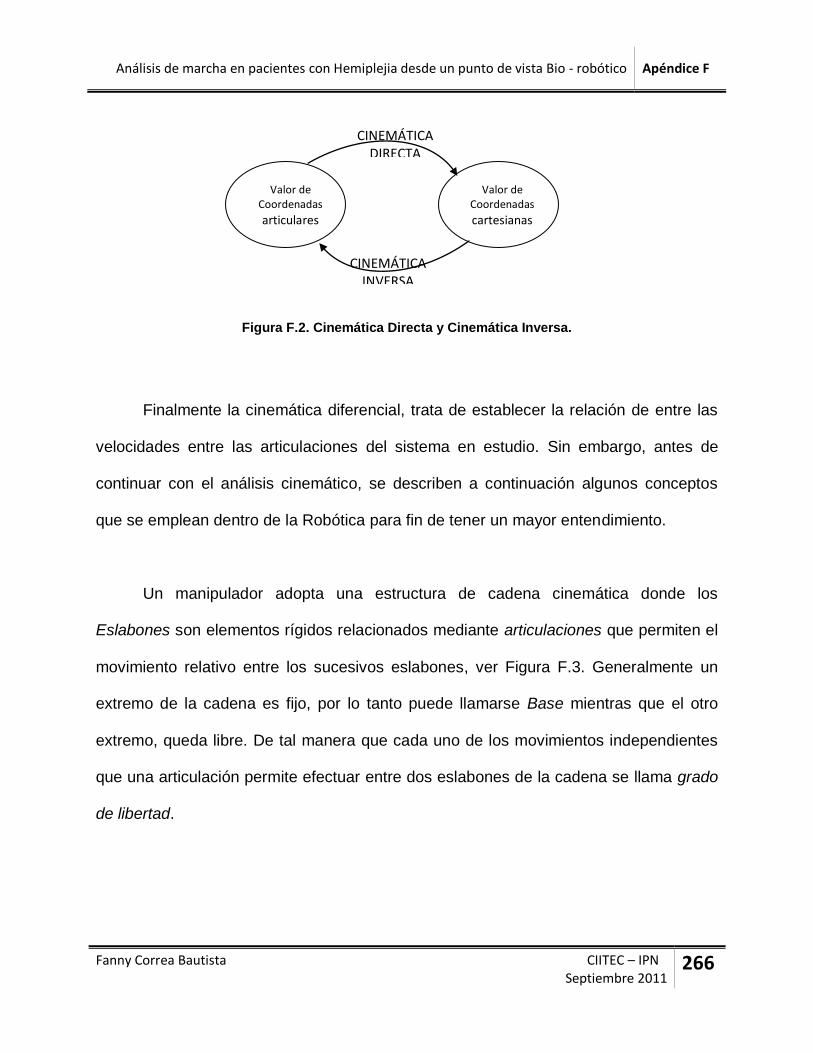
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
266
Figura F.2. Cinemática Directa y Cinemática Inversa.
Finalmente la cinemática diferencial, trata de establecer la relación de entre las
velocidades entre las articulaciones del sistema en estudio. Sin embargo, antes de
continuar con el análisis cinemático, se describen a continuación algunos conceptos
que se emplean dentro de la Robótica para fin de tener un mayor entendimiento.
Un manipulador adopta una estructura de cadena cinemática donde los
Eslabones son elementos rígidos relacionados mediante articulaciones que permiten el
movimiento relativo entre los sucesivos eslabones, ver Figura F.3. Generalmente un
extremo de la cadena es fijo, por lo tanto puede llamarse Base mientras que el otro
extremo, queda libre. De tal manera que cada uno de los movimientos independientes
que una articulación permite efectuar entre dos eslabones de la cadena se llama grado
de libertad.
Valor de Coordenadas
articulares
Valor de Coordenadas
cartesianas
CINEMÁTICA DIRECTA
CINEMÁTICA INVERSA

Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
267
Figura F.3. Ejemplo de Cadena Cinemática.
Generalmente, cualquier elemento de la cadena esta caracterizado por, ver
figura F.4:
Longitud (an): Distancia entre los ejes de las articulaciones en las que finaliza el
eslabón.
Torsión (αn): Ángulo que, en un plano perpendicular a an, existe entre ambos
ejes.
Figura F.4. Longitud y torsión de un elemento de la cadena cinemática.
BASE
Articulación 1
Articulación 2
Articulación n
Eslabón 1
Eslabón n
Eslabón 2
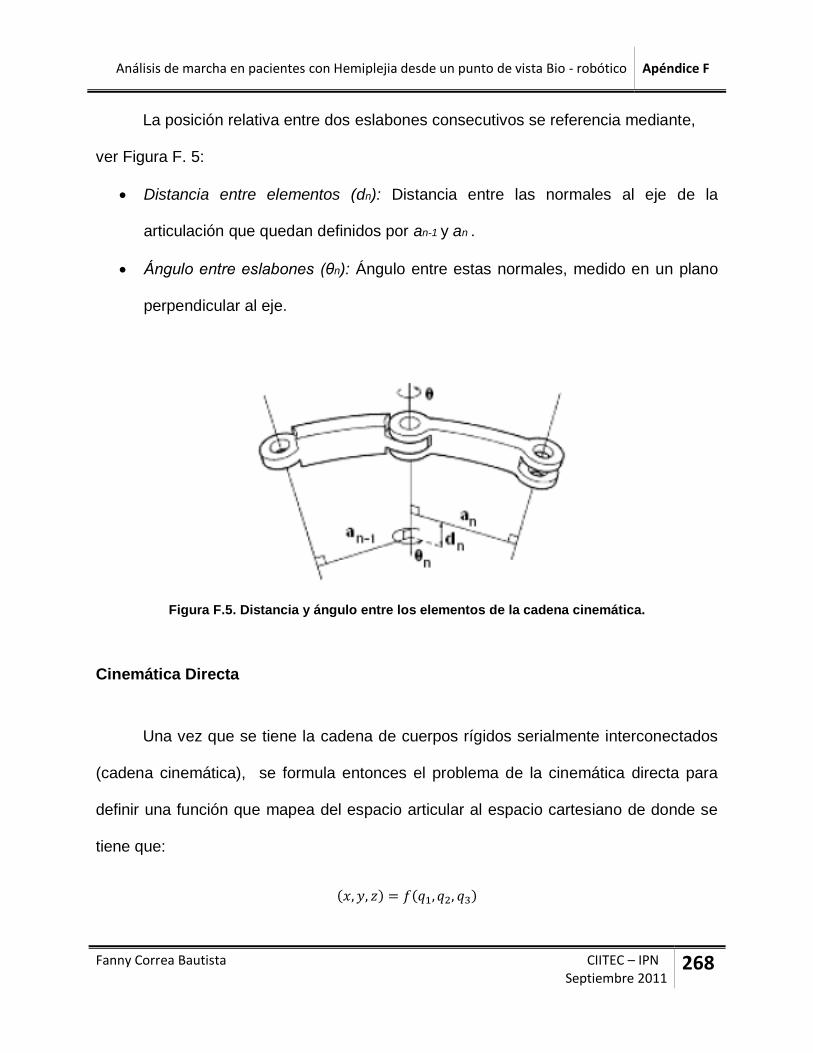
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
268
La posición relativa entre dos eslabones consecutivos se referencia mediante,
ver Figura F. 5:
Distancia entre elementos (dn): Distancia entre las normales al eje de la
articulación que quedan definidos por an-1 y an .
Ángulo entre eslabones (θn): Ángulo entre estas normales, medido en un plano
perpendicular al eje.
Figura F.5. Distancia y ángulo entre los elementos de la cadena cinemática.
Cinemática Directa
Una vez que se tiene la cadena de cuerpos rígidos serialmente interconectados
(cadena cinemática), se formula entonces el problema de la cinemática directa para
definir una función que mapea del espacio articular al espacio cartesiano de donde se
tiene que:
Análisis de marcha en pacientes con Hemiplejia desde un punto de vista Bio - robótico Apéndice F
Fanny Correa Bautista CIITEC – IPN Septiembre 2011
269
Donde para representan las coordenadas articulares o también llamadas
coordenadas generalizadas.
Para obtener el modelo cinemático directo, se emplea el método sistemático de
Denavit-Hartenberg (D-H) para situar los sistemas de coordenadas asociados a cada
eslabón de la cadena cinemática. Este método, permite el paso de un eslabón al
siguiente mediante 4 trasformaciones básicas que relaciona el sistema de referencia
del elemento i con el sistema de referencia del elemento i-1. Esto es:
Distancia a lo largo de , desde hasta la intersección de y .
Distancia a lo largo de , desde hasta la intersección de y .
Ángulo medido entre , y alrededor de .
Ángulo medido entre , y alrededor de
Por lo tanto, el Modelo Cinemático Directo se obtiene mediante los siguientes pasos:
Obtener los Parámetros Denavit-Hartenberg correspondientes a la cadena
cinemática propuesta.
Sustituir los parámetros correspondientes del eslabón i en la matriz de
transformación Ti, que es la matriz de transformación base.
Realizar el producto para obtener la matriz de transformación , la
cual contiene el vector de posición del efector final.




![Exposicion hemiplejia[1]](https://static.fdocuments.co/doc/165x107/559362281a28ab9e478b4653/exposicion-hemiplejia1.jpg)












