Editorial - upvm.edu.mxEste proceso fue estudiado y graficado por Everett Rogers (Figura 1.3), que...
32
Transcript of Editorial - upvm.edu.mxEste proceso fue estudiado y graficado por Everett Rogers (Figura 1.3), que...



Universidad Politécnica del Valle de México 1
Editorial
Las actividades de investigación científica, humanística y tecnológica generan nuevos conocimientos y las Instituciones de Educación Superior los transmiten y los incorporan en sus planes y programas de estudio, por lo tanto los estudiantes los pueden adquirir durante su formación profesional. Por otra parte los sectores productores de bienes y servicios, incorporan el conocimiento como insumo en sus productos y servicios, generando la innovación en los mismos y mejorando de esta forma la productividad y competitividad de dichos sectores.
La información generada como resultado de las actividades científicas, humanísticas y tecnologías, se puede convertir en conocimiento a través de diversos procesos que se llevan a cabo en universidades, instituciones de educación superior, y centros de investigación y desarrollo. Cuando el conocimiento se convierte en insumo fundamental de los procesos sociales, económicos y culturales, se produce la innovación, generando nuevos productos y servicios. En este sentido se logra la articulación formación-investigación-innovación; sin embargo por una parte se originan fortaleza y oportunidades que mejoran las condiciones de bienestar y progreso de las personas y de la sociedad en general, pero por otra se pueden originar amenazas y debilidades, que trastocan y afectan negativamente el tejido social.
Para socializar los resultados de la articulación formación-investigación-innovación, es fundamental difundir dichos resultados, en consecuencia en este número de Innovación Tecnológica, se han incluido artículos generados por investigadores de instituciones y empresas de reconocido prestigio como Manpower; la Universidad Nacional Autónoma de México (UNAM); el Instituto Politécnico Nacional (IPN); la Universidad Autónoma Metropolitana (UAM), y la Universidad Politécnica del Valle de México (UPVM);cabe destacar que los investigadores de la UPVM son profesores de tiempo completo, que conforman los cuerpos académicos (CA) y participan en redes de colaboración con otras instituciones de educación superior.
En este número se incluye un artículo del Consejo Mexiquense de Ciencia y Tecnología (COMECyT), orientado a fomentar la innovación como una estrategia de desarrollo a través del Sistema Estatal de Innovación.

Estudio Dispersión de Luz Dinámica de Nanopartículas de Oro (AuNPs): Efecto Temperatura
Control Bilateral de un Sistema de Teleoperación Maestro Esclavo Similar
La Innovación comoestrategia
Cambios microestructurales de laaleación Zn - 22% pAl - 2% Cu producidos por envejecimiento a 290 oC
3
10
8
16
Innovación Tecnológica
Contenido
Análisis exergético del ciclo de refrigeración por compresión de vapor utilizando CO2
20
Construyendo un SistemaEstatal de Innovación
26

Universidad Politécnica del Valle de México 3
1.1 ¿Qué es la innovación aplicada?
La palabra innovación ha dominado las discusiones en prácticamente
todos los ámbitos del quehacer humano contemporáneo: No
solamente en los negocios, sino también en el gobierno, la academia
y organizaciones sociales de todo tipo. Pero como todo concepto de
moda, el de innovación resulta a veces confuso y malentendido, por
lo que el valor y la importancia de la verdadera innovación aplicada
se nos escapan junto con los beneficios que ésta nos debería traer.
Cuando hablamos de innovación, no nos referimos exclusivamente
a un avance tecnológico patentado, el trabajo de un laboratorio de
Investigación y Desarrollo (IyD) en una empresa globalizada o una
iniciativa de alto impacto.
La innovación (del latín innovatio, “renovar”)1 se refiere a la
dinámica de las organizaciones humanas que nos lleva a ser mejores
productores, vendedores, estudiantes, gobernantes, etc. En esa
acepción, la Product Development Management Association (PDMA)
la define como “Una nueva idea, método o producto. Se conoce
también como el acto de creación de un nuevo producto o proceso;
dicho acto envuelve tanto la invención como el trabajo requerido
para que la idea o concepto tome forma”2.
Para fines de esta investigación, la innovación aplicada es entendida
como un cambio revolucionario o el desarrollo de un nuevo producto,
proceso, organización, sistema de pensamiento o modelo de negocio
que genere un valor apreciado por el mercado (Manpower, 2010).
Es el motor más importante para la generación de valor económico
y social en el siglo XXI, pues ha sido aplicada en todos nuestros
ámbitos de influencia, lo cual ha permitido evolucionar y mejorar
nuestra competitividad en el mercado. En ese sentido, la innovación
puede trasladarse a categorías de productos o servicios, desarrollo
de tecnologías o implementación de modelos de negocios
que no se hayan visto antes (véase Figura 1.1).
Por ello, debe ser compromiso de los empleadores identificar a la
innovación como un elemento necesario en el desarrollo y evolución
de sus organizaciones y para orientar su gestión del talento en la
obtención de aquellos elementos que ayuden a desarrollar un
proyecto de innovación. Los altos mandos también deberán analizar
los distintos ejes a partir de los cuales se pueda emprender un
proyecto. Estos ejes nos permitirán entender la naturaleza de la
innovación, sus principales características, lo que podemos esperar
de ella y cómo administrarla.
1.2 Ejes de la innovación
Por medio de estos ejes podemos responder las preguntas básicas
para desarrollar un proyecto de innovación en una organización:
a) La fuente (¿quién?). Indica si la innovación se realizó dentro o fuera
de la organización. La innovación interna puede ser orgánica (aquélla
que se da de manera espontánea y sin una estrategia concreta para
La Innovación comoestrategia
Figura 1.1 Áreas de aplicación de la innovaciónFuente: PDMA Chapter México, 2008.
1 Real Academia Española, Diccionario de la Lengua Española, 20ª edición en línea: http://www.rae.es2 PDMA, The PDMA Glossary for New Product Development, 2006: http://www.pdma.org/npd_glossary.cfm
Extraído del documento de Manpower:Talento para la Innovación: Una Nueva Cultura de NegociosCapítulo 1

4 Universidad Politécnica del Valle de México
generarla) o sistémica (es la que está respaldada por una práctica
definida por la organización). La innovación orgánica es generada por
algún integrante de la organización.
Por otro lado, las innovaciones externas se pueden dar por
adquisición, colaboración con otras organizaciones o por una política
de desarrollo de proveedores innovadores. Es común encontrar
organizaciones o instituciones que se perciben con capacidades
limitadas para realizar una innovación necesaria, por lo que pueden
recurrir a organizaciones más adecuadas, probablemente más
pequeñas, para realizar esta innovación (véase Tabla 1.1).
requiere la innovación incremental o sostenida. En otros mercados,
cuya competencia se basa en cambios agresivos en sus estrategias o
línea de productos, es necesaria la innovación disruptiva.
b) El enfoque (¿qué?). Se refiere al resultado principal de la innovación,
ya sea un producto, servicio, proceso o nuevo modelo de negocio.
De este enfoque dependerá el usuario final de la innovación. Los
productos y servicios están dirigidos al consumidor, y los procesos
y el modelo de negocio afectan a la organización, ya sea en parte
o en general. De acuerdo con los directivos entrevistados, este eje
es crítico pues “hay proyectos de innovación que no tienen éxito
porque se entendían como una innovación en producto, cuando se
trataba de un cambio en el modelo de negocio”3. La claridad en ese
sentido es muy valiosa.
c) El origen (¿dónde?). Éste puede ser una empresa existente o un
start-up; es decir, una empresa en su punto de arranque (Manpower,
2010). La innovación generada en un start-up puede ser el activo más
importante para el desarrollo de la nueva organización, por lo que
todos los esfuerzos giran en torno a ella. En el caso de empresas
existentes, la innovación puede tener distinto nivel de importancia y
trascendencia.
d) La dirección (¿cómo?). La innovación puede ser promovida desde
los altos ejecutivos (top-down) o desde la base de la compañía
(bottom-up). El hecho de que la dirección sea top-down no garantiza
que la innovación se realice sistémicamente utilizando un proceso o
metodología ni que el nuevo producto o servicio tenga éxito una vez
lanzado en el mercado.
e) El nivel de transformación (¿cuánto?). La innovación puede
presentarse en distintas formas. Hay mercados que requieren un flujo
continuo de innovación para mantener su crecimiento; en ellos se
Tabla 1.1 Fuentes de la innovaciónFuente: Manpower, 2010.
La innovación incremental se basa en el mejoramiento continuo, y
se traduce en reducción de costos, en la mejoría de la calidad del
producto o servicio y en extensiones de línea que nos permitan
alcanzar nuevos mercados, mayor utilidad por venta o economías de
escala. Otra ventaja de este enfoque es que introduce en el ámbito
organizacional la aceptación del cambio continuo; en un entorno tan
competitivo, esta capacidad de adaptación y flexibilidad es una ventaja.
La innovación disruptiva puede entenderse como aquella introducción
de nuevos productos o servicios de un modo tal que el mercado
no esperaba. Puede sustituir completamente una tecnología, un
producto, un modelo o una práctica dominante. Esta definición
implica una adopción por parte de la fracción mayor del mercado
objetivo, sustituyendo de manera clara y contundente a
sus antecesores.
Una vez realizado este análisis dentro de la organización, (véase
Figura 1.2) el talento elegido fungirá en ocasiones como patrocinador,
facilitador o parte activa del proceso, incluso promotor del resultado
final hacia el exterior, pero siempre bajo un líder que logre alinear la
estrategia de innovación con la estrategia de negocio y que ambos
persigan un fin último en común: la adopción generalizada de la
innovación.
1.3 Adopción de la innovación
Cualquier mercado o grupo social puede adoptar una innovación de
manera gradual debido a que distintos perfiles de personas lo hacen
3 Manpower con base en las entrevistas realizadas a líderes de innovación en América Latina.

Universidad Politécnica del Valle de México 5
en distintos momentos. Como la innovación se reconoce en la medida
en que un mercado asigna un valor a un nuevo producto, es natural
identificar aquella innovación exitosa de acuerdo con el grado de
adopción de la misma. En ocasiones, un producto innovador no sólo
se convierte en la base común para los consumidores en un mercado
dado, sino que, por la facilidad de su uso, mejora en el desempeño o
reducción del costo de una actividad asociada con dicho producto, se
vuelve innovador para un grupo social mucho más amplio.
Figura 1.2 Los ejes de la innovaciónFuente: Manpower, 2010.
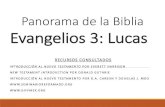
Este proceso fue estudiado y graficado por Everett Rogers (Figura
1.3), que estimó la representatividad de cada uno de los subgrupos
de individuos que componen el total del mercado (interno y externo)
y que cobran importancia en la generalización de la adopción, pues
llegado a un punto definido, ésta se volverá exponencial.
Figura 1.3 Proceso de adopción de la innovaciónFuente: Everett Rogers, Diffusion of Innovations, Glencoe, 1996.
Entender cómo o por qué se puede lograr que una innovación sea
adoptada por más individuos es fundamental para que la práctica de la
innovación no se convierta en ese tema de moda, lejano e inabarcable,
que muchas veces queda fuera de la realidad de las organizaciones,
sino en una estrategia de generación de valor aplicada en ellas. En ese
sentido, para aumentar la probabilidad de adopción de la innovación,
se deben de tomar en cuenta los siguientes factores:
a) Visibilidad: A mayor visibilidad, mayor adopción. Transmitir a los
usuarios de la innovación aspectos de calidad, vanguardia, visión u
otras características que sean altamente apreciadas por éstos.

6 Universidad Politécnica del Valle de México
b) Ventaja relativa: Supera a tu antecesor. Si una innovación logra
que el mercado perciba una ventaja con respecto a otras alternativas,
entonces será más fácil que sea adoptada por ese mercado. Si alguna
innovación presenta una ventaja objetiva, pero ésta no es asimilada por
el mercado, entonces perderá relevancia, y la adopción será limitada.
c) Compatibilidad: Alinear la innovación con los valores del mercado
objetivo. Si la innovación presenta notables ventajas, pero el mercado
percibe que no satisface sus necesidades, que se requiere cambios
en los valores del individuo u organización innovadora o que se han
tenido experiencias negativas con innovaciones similares, la adopción
será menor.
d) Complejidad: ¡Mantenlo simple! Se refiere al grado en el cual
la innovación es percibida como difícil de usar o implementar.
Aunque la innovación sea simple, si se requiere una teoría difícil
para comprenderla o adoptarla, la innovación no será rápidamente
aceptada por el mercado.
e) Evaluabilidad: Permite probar y decidir. El mercado analiza si tiene
una opción de probar antes de comprometerse con la innovación
con la intención de disminuir el riesgo. En la medida en que esta
evaluación sea positiva, las posibilidades de adopción serán mayores.
1.4 Generación de la innovación
Las etapas básicas de cualquier proceso de innovación aplicada son
las siguientes:
• Reconocimiento/identificación de la necesidad u oportunidad en el
mercado.
• Desarrollo del concepto.
• Desarrollo de una “solución” a esa necesidad.
• Comercialización/diseminación de la solución o alternativa.
El proceso de innovación se puede entender de una manera cíclica o
lineal. La diferencia consiste en la función que se asigne a la innovación
y en la situación particular de la organización que pretende innovar.
El modelo lineal de generación es un enfoque de proyecto; es decir,
tiene un inicio y un final. Su objetivo es generar una innovación que
presente la mayor adopción en el mercado lo más rápido posible
(véase Figura 1.4).
Por su parte, el modelo cíclico representa la estructura de un proceso
de innovación continua. El objetivo que normalmente persigue una
organización con este tipo de procesos es generar mejoras que el
consumidor valore, medir el impacto en algún indicador de desempeño
(ventas, usuarios, matrícula, entre otros) y generar aprendizaje para
que la siguiente innovación tenga aún mayor impacto en el mismo u
otro indicador de desempeño (véase Figura 1.5).
Figura 1.4 Proceso lineal de innovaciónFuente: Manpower, 2010.
Figura 1.5 Modelo cíclico de innovaciónFuente: Manpower, 2010.

Universidad Politécnica del Valle de México 7
La primera evaluación de un proyecto o esfuerzo dado consiste en
explorar nuevas posibilidades; después, se evalúa la viabilidad y el
potencial del desarrollo y, por último, se piensa en realizar esfuerzos
para introducir o comercializar la innovación. La segunda evaluación,
relacionada con la factibilidad de proporcionar una solución adecuada
y satisfactoria para la necesidad a la que se dirige la innovación,
permite identificar a tiempo proyectos que no van a funcionar y así
minimizar posibles pérdidas de energía, tiempo o dinero.
Cabe señalar que el talento requerido para cada una de las etapas
puede variar dependiendo de sus habilidades y competencias. Éstas
deberán ser gestionadas correctamente por el líder del proyecto de
innovación, que mantendrá el enfoque de la estrategia organizacional
de la empresa.
1.5 El impacto del talento en la innovación
El activo básico de cualquier organización es el talento, por lo que
cualquier esfuerzo que tenga como objetivo establecer prácticas
que generen resultados para la innovación tiene que enfocarse en la
selección, desarrollo, liderazgo y retención del talento.
Las grandes organizaciones del siglo XX desarrollaron estándares
y prácticas de gestión de talento que fueron muy efectivas en su
momento, pero ahora pueden convertirse en un obstáculo para
la innovación. Durante el periodo de la economía de eficiencia, las
estructuras verticales y la estandarización de los procesos únicos
e “infalibles” fueron un impulsor de ventajas competitivas que
eran suficientes para permanecer o dominar mercados locales e
internacionales de aquel entonces.
El entorno competitivo actual es distinto, por lo que la eficiencia no
es un diferenciador suficiente; en algunas ocasiones ésta ni siquiera
es posible debido a la competencia de países con bajos costos. Las
estructuras verticales y predecibles necesitan evolucionar hacia
estructuras que sean terreno fértil para la innovación.
Estos cambios organizacionales deben reflejarse en la integración de
los equipos de trabajo, la formación de un liderazgo preparado para
la innovación, procesos claros y enfocados, así como en una cultura
que facilite la asimilación de los retos y la incertidumbre asociada con
la innovación. Las organizaciones que logren gestionar el talento para
la generación sistemática de innovación exitosa contarán con mejores
capacidades para conservar un crecimiento continuo y sostenible.
Aunque una organización mantenga sus políticas, procesos y
procedimientos alineados para generar un clima propicio para
la innovación, no será suficiente si el talento que compone tal
organización no está comprometido con ello. Es necesario que sus
integrantes y aspirantes desarrollen las capacidades, competencias
y habilidades que tradicionalmente no han sido inculcadas por el
sistema educativo latinoamericano, pero que resultan indispensables
para la integración y desenvolvimiento dentro del cambiante mundo
laboral.

8 Universidad Politécnica del Valle de México
ResumenEn este trabajo se presenta la preparación y caracterización de
nanopartículas de Au (AuNPs) sintetizadas a partir de las sales de
oro. La banda típica de las partículas que se encuentran en escala
nano se presenta en el espectro electrónico en estado de solución. El
análisis de la distribución del tamaño de los AuNPs por la técnica de
dispersión de luz dinámica (DLS) muestra que AuNPs no son estables
a altas temperaturas debido a la formación de conglomerados grandes
por la agregación de partículas de menor tamaño a otras de mayor
tamaño. Sin embargo, en temperatura ambiente, se encontró que el
tamaño de las AuNPs es de 18.57 nm.
Introducción: Las nanopartículas de metales nobles específicamente, las
nanopartículas de oro (AuNPs), exhiben unas excelentes propiedades
físicas, químicas y biológicas, que son intrínsecas a su tamaño
nanométrico. Éstas tienen aplicaciones considerables en la óptica,
catálisis, ciencia de materiales y nanotecnología, incluyendo la biología
y la nanomedicina[1], particularmente, la foto diagnosis y la terapia foto
termal en el cáncer y en terapia génica (vehiculización de plásmidos,
DNA, RNA, etc.,)[2]. El objetivo de la vectorización de fármacos
que promete un gran futuro es la disminución o supresión de los
efectos secundarios debido a la toxicidad, el aumento de la eficiencia
terapéutica y biodistribución, además de resolver los problemas de
solubilidad, estabilidad y farmacocinética de los medicamentos. En
esta revisión crítica, el objeto de interés son las AuNPs incluyendo
también las AuNPs no esféricas en la bioquímica y la nanomedicina
con énfasis en las áreas mencionadas anteriormente.
Aunque las AuNPs pueden ser estabilizadas por medio de diferentes
estabilizadores (ligantes, agentes activadores de superficies,
polímeros, dendrímeros, biomoléculas, etc.), Giersig y Mulvaney[3-4]
han divulgado que las AuNPs más robustas pueden ser estabilizadas
por tiolatos utilizando la fuerte unión Au-S entre el ácido débil de Au
y la base débil del tiolato. De acuerdo con esto, el método de síntesis
más popular usando la coordinación de azufre para la estabilización
Estudio Dispersión de Luz Dinámica de Nanopartículas de Oro (AuNPs): Efecto Temperatura*
de las AuNPs es, por mucho, la síntesis bifásica de Shiffrin-Brust,
que utiliza HAuCl4, tiol, bromuro de tetraoctilamonio y NaBH4 en
agua-tolueno obteniéndose AuNPs-tiolato (AuNPs)[5]. Las AuNPs
recubiertas de citrato y las AuNPs al igual que AuNPs recubiertas
de bromuro de cetiltetrametilamonio (CTAB) no son estables en
solución buffer, ya que los iones de sal tiene un efecto agregativo, pero
estas AuNPs pueden ser fácilmente estabilizadas por ligantes PEG-
tiol funcionalizados[6-8]. Con base en ello, el objetivo del presente
proyecto es preparar las nanoparticulas de oro y caracterizarlas por
diferentes técnicas analíticas, además de analizar la estabilidad de las
nanopartículas a través del tiempo y la temperatura.
Materiales y métodos:Todos los reactivos y disolventes empleados fueron de grado
analítico. Las AuNPs se prepararon a partir de las disoluciones de
tetracloroaurato (5.0 mM) y citrato de sodio (150 mM). El espectro
de absorción electrónica de los AuNPs sintetizados, se obtuvo en la
región correspondiente al ultravioleta-visible, empleando disoluciones
de agua. Las mediciones se realizan dentro de celdas de cuarzo de 1cm
de paso óptico, empleando un espectrofotómetro UV/Vis/NIR doble
haz, Perkin-Elmer Lambda 9000. La imagen microscópica de las AuNPs
se tomó por la microscopía electrónica de transmisión (Microscopio
Electrónico de Transmisión-JEOL 1200EXII). La distribución del
tamaño de las partículas se analizó por técnica de dispersión de luz
dinámica (DLS). Se obtuvieron 86 % de nanopartículas en el tamaño
de 39.71-39.86 nm, 5% de las partículas tienen un tamaño mayor de
3866-333 nm, mientras que cerca del 9% tienen un tamaño inferior
de alrededor de 0.79-0.99 nm. Las medidas similares fueron llevadas a
cabo en soluciones diluidas (0.1 mM); observándose un patrón similar
en los resultados obtenidos.
Resultados y discusión:Análisis UV-visible y Dispersión de luz dinámica (DLS):
El espectro (Fig. 1) muestra que la solución exhibe una banda visible
*Jayanthi Narayanana
Profesora de tiempo completo de la División de Ingenieria en InformáticaUniversidad Politécnica del Valle de Mé[email protected]
*José Moisés Talamantes Gómezb
Facultad de QuímicaUniversidad Nacional Autónoma de México (UNAM).

Universidad Politécnica del Valle de México 9
Conclusión:Las AuNPs fueron preparadas y caracterizadas por diferentes
técnicas espectroscópicas. Después de analizar los resultados, se
encontró que las AuNPs son estables a temperatura ambiente o a
bajas temperaturas, pero son sensibles a altas temperaturas debido
a la agregación de partículas de pequeño tamaño a otras de mayor
tamaño para formar conglomerados grandes.
Agradecimiento:Jayanthi Narayanan agradece a Biól. Rosa María Picaso Hernández,
Instituto de Fisiología Celular de la UNAM para su apoyo en la
técnica Microscópica. También agradece USAI (Unidad de Servicios
de Apoyo a la Investigación, Facultad de Química, UNAM) para los
servicios analíticos.
Bibliografía:[1] M.C. Daniel, D. Astruc, Chem. Rev. 104 (2004) 293.[2] G.M. Whitesides, Nat. Biotechnol. 21 (2003) 1161.[3] M. Giersig, P. Mulvaney, J. Phys. Chem. 97 (1993) 6334.[4] M. Giersig, P. Mulvaney, Langmuir 9 (1993) 3408.[5] M. Brust, M. Walker, D. Bethell, D.J. Schiffrin, R. Whyman, Journal of the Chemical
Society-Chem. Commun. (1994) 801.[6] T. Ito, N. Iida-Tanaka, T. Niidome, T. Kawano, K. Kubo, K. Yoshikawa, T. Sato, Z.H.
Yang, Y. Koyama, J. Controlled Release 112 (2006) 382.[7] T. Niidome, M. Yamagata, Y. Okamoto, Y. Akiyama, H. Takahashi, T. Kawano, Y.
Katayama, Y. Niidome, J. Controlled Release 114 (2006) 343.[8] T. Okuda, S. Kawakami, T. Maeie, T. Niidome, F. Yamashita, M. Hashida, J.
Controlled Release 114 (2006) 69.
a 516 nm la cual es una banda característica de las partículas que
se longitud de onda (nm) encuentran en nano escala. Además,
después de analizar los resultados de UV-Vis de la solución de nano-
partículas se encontró que estas partículas en solución son estables a
temperatura ambiente.
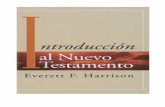
diámetro de 18.7 nm es de un mayor porcentaje, pero a elevada
temperatura (50° C), la presencia de partículas con un diámetro de
158.7 nm es mayor que la temperatura ambiente.
Microscopia de transmisión de electrones (TEM):
El comportamiento de las AuNPs fue analizado por técnicas TEM. Una
pequeña porción de la solución fue depositada en una fina lámina de
cobre cubierta con una material de carbono y después fue dejada secar
y fue analizado por TEM. Los resultados de la microscopia electrónica
muestran que hay AuNPs finas formadas a temperatura ambiente,
indicando el tamaño de las partículas es menor a 50 nm. Este estudio
sugiere que la superficie de estas partículas puede tener un carácter
fluorescente el cual es esencial para muchas aplicaciones biológicas.
Sin embargo, aunque las AuNPs son estables a temperatura ambiente
o bajas temperaturas, al elevar la temperatura a más de 75 °C, se
observa un cambio en el espectro visible, por ejemplo, la banda
de 516 nm es ligeramente desplazada hacia el lado de alta energía
(desplazamiento hacia el azul), esto indica que las partículas en
nano-escala se agrupan para formar partículas de mayor tamaño a
altas temperaturas, indicando que la temperatura juega una papel
importante en la estabilidad de las nano-partículas.
Figura 1. Espectro UV-visible que muestra la evolución de AuNPs
Diámetro (nm) La intensidad (%) 16.27 016.54 016.82 017.10 017.38 017.67 017.97 1018.27 5518.57 10018.88 9019.20 45
Tabla 1. Distribución de tamaño de la AuNPs por análisis dispersión de luz dinámica (DLS) (25°C)
En los estudios de DLS, se observó el tamaño de las partículas, en
el que la mayoría tienen un diámetro de aproximadamente 18.7 nm
y el tamaño es estable a temperatura ambiente, concordando con
los resultados de UV-Vis. Sin embargo, como se encontró en el
experimento de UV-Vis a temperatura elevada, en donde se presenta
la agrupación de nano-partículas, por la razón en el estudio de DLS el
diámetro de la partícula se incrementa de 18.7 a 158.7 nm. Además,
en temperatura ambiente la presencia de nano partículas con un
Figura 2. Imagen TEM del sistema AuNPs. Magnificación: 100000X

10 Universidad Politécnica del Valle de México
ResumenEn este trabajo se presenta el desarrollo de un esquema de
control bilateral para un sistema de teleoperación maestro-esclavo
constituido por 2 robots cinemáticamente similares de 2 grados de
libertad, con suposición de retardo nulo y un ambiente de interacción
como restricción, en este caso modelado como un plano virtual.
Se presentan los modelos dinámicos de ambos robots y el modelo
de la restricción la cuál es de tipo holonómica. En el modelado
dinámico de estos sistemas se utilizan ecuaciones diferenciales
algebraicas para efectos de interacción con restricciones físicas del
entorno. Se persigue que el sistema bilateral presente características
de tele-transparencia, es decir que el operador perciba y manipule
remotamente la fuerza de reacción que se produce cuando el esclavo
permanece en contacto con el objeto. Se realizan simulaciones en
lazo cerrado, las cuales muestran seguimiento en fuerza y posición
del sistema lo que resulta en transparencia del mismo. Para lograr
esta característica en el sistema bilateral se implementa en ambos
teleoperadores una técnica de control, basada en el principio de
ortogonalización en espacio articular para descomposición de fuerza
y posición, combinada con un controlador PID para seguimiento de
trayectoria en posición y fuerza.
Palabras clave: teleoperación bilateral, control ortogonal, tele-
transparencia.
AbstractThis paper presents the development of a control scheme for a
system of bilateral teleoperation master-slave consisting of two similar
kinematic robots with 2 degrees of freedom, with an assumption of
Control Bilateral de un Sistema de Teleoperación Maestro Esclavo Similar*
*Humiko Yahaira Hernández AcostaProfesor de tiempo completo de la División de Ingenieria Mecánica y ElectrónicaUniversidad Politécnica del Valle de México
*Alejandro Rodríguez ÁngelesCentro de Investigación y Estudios AvanzadosInstituto Politécnico Nacional [email protected]
*Carlos Alberto Cruz VillarDepartamento de Ingeniería EléctricaCINVESTAV - Instituto Politécnico Nacional [email protected]
zero delay and an environment of interaction as a restriction, in this
case modeled as a virtual plane. We present the dynamic models of
both robots and the model of the restriction which is considered
to be holonomic. In the dynamic model of these systems are used
algebraic differential equations for purposes of interaction with
physical constraints of the environment. It pursues that the bilateral
system features this tele-transparency, saying that the operator is
perceived and handled remotely reaction forcing that occurs when
the slave is in contact with the object. It was conducted in closed
loop simulations, with show force and position tracking system which
results in transparency. To achieve this feature in the bilateral system
is implemented in both teleoperators a technique of control, based
on the orthogonalization principle in joint space for decomposition
of force and position, combined with a PID controller for tracking
trajectory in position and force.
Keywords: bilateral teleoperation, orthogonal control, tele-
transparency.
IntroducciónEn los últimos años, una gran cantidad de investigación se ha
enfocado en el entendimiento y la superación de los problemas de
la teleoperación bilateral. Desde mediados de los 40’s, cuando el
primer teleoperador maestro-esclavo fue construido por Goertz [1],
el campo de la teleoperación ha pasado por varias etapas, empezando
por la comprensión de la interacción entre humanos y robots hasta
el control de dicha interacción y la estabilidad de la comunicación
entre ellos.
La teleoperación amplía la capacidad humana de manipular los
objetos a distancia, mediante un operador en condiciones similares
o no similares a las que se encuentra la ubicación remota. Esto se
logra a través de la instalación de un manipulador, llamado maestro,
en general el humano provee movimiento e induce fuerza en el
manipulador maestro, que a su vez se traduce en un desplazamiento,
el cuál debe ser imitado por el esclavo, quien realiza la tarea real e
interacciona con el ambiente u objeto. Si el esclavo posee sensores de
fuerza, dicha fuerza se puede transmitir o reflejar al maestro cuando
se realiza la tarea (contacto con ambiente u objeto). La fuerza de

Universidad Politécnica del Valle de México 11
Fig. 1 Sistema de Teleoperación Bilateral
Fig. 2 Esquema bilateral Posición-Fuerza
reacción entra en el control del maestro y entonces se dice que
existe una teleoperación controlada bilateralmente, ver Fig. 1 [2].
Aunque las fuerzas se reflejan al operador humano, éste reacciona
dependiendo de sus sentidos táctil y visual, lo que podría ser causa
de inestabilidad en el sistema en caso de retrasos presentes en los
medios de comunicación. Este retraso inducido por la inestabilidad de
la fuerza que refleja hacia el operador ha sido uno de los principales
desafíos que enfrentan los investigadores.
Desde un punto de vista de teoría de control, los principales objetivos de
teleoperación son dos:
Estabilidad: Mantener la estabilidad de los sistemas en lazo cerrado,
independientemente de la conducta del operador o el medio
ambiente.
Telepresencia: Proporcionar al operador humano un sentido de presencia
en el lugar remoto, es decir como si estuviera manipulando directamente
el objeto con el que interactúa el robot esclavo, lo cuál proporciona
transparencia del sistema entre el medio ambiente y el operador [3].
Estas tareas generalmente entran en conflicto, debido a que debe
existir un compromiso en el cumplimiento de ambas características
para hacer posible que se extienda la capacidad de los humanos
por ampliar su poder de manipulación de grandes objetos o de la
realización de tareas delicadas como la microcirugía.
Los sistemas de teleoperación que se encuentran hoy en día son tan
variados como las técnicas que se emplean para su control.
Para los esquemas bilaterales se tienen cuatro combinaciones básicas:
Posición-Posición, Posición-Fuerza, Fuerza-Posición, Fuerza-Fuerza
[4]. En la figura 2 se muestra un esquema Posición-Fuerza, donde x0
es la posición inducida por el operador hacia el maestro quién a su
vez la induce por medio de un canal de comunicación hacia el esclavo,
donde al estar en contacto con el ambiente le imprime una fuerza
de reacción que transmite hacia el maestro y este hacia el operador
cerrando el ciclo del sistema bilateral.
En este trabajo se propone un esquema de teleoperación bilateral
que garantiza la transparencia del sistema, bajo la suposición de
que el retardo es nulo. La idea básica es implementar en ambos
teleoperadores una ley de control de alto desempeño basándose
en el principio de ortogonalización [5]. Lo que garantiza una rápida
convergencia de los errores de posición y fuerza.
La parte medular de este trabajo es mostrar la ventaja que tiene el
uso de la descomposición ortogonal sobre el enfoque de impedancia
en relación al seguimiento y convergencia de los errores de fuerza y
posición del sistema de teleoperación bilateral. Mientras el control de
impedancia [6] implica un compromiso entre el seguimiento en fuerza
y el de posición, el control ortogonal hace una descomposición en
dos espacios vectoriales, uno en fuerza y otro en velocidad, lo que
permite controlar simultáneamente tanto la fuerza como la posición.
Se propone una nueva alternativa para controlar bilateralmente un
sistema de teleoperación, donde la comunicación del maestro hacia
el esclavo es en posición y fuerza, y la del esclavo hacia el maestro es
en fuerza, utilizando control ortogonal en ambos sistemas.
En el artículo se presenta el modelo general del sistema bilateral así
como el esquema de control utilizado para la teleoperación bilateral.
Posteriormente se plantea la validación del modelo, y finalmente se
presenta una simulación del sistema bilateral teleoperado cuyos
resultados obtenidos muestran la convergencia de los errores
en fuerza y posición tanto del robot esclavo como del maestro,
mostrando resultados con características de transparencia.
Modelo dinámico del sistema de teleoperación bilateralLos robots empleados como maestro y esclavo tienen la característica
de ser cinemáticamente similares. Son sistemas dinámicos Euler-
Lagrange cuyos eslabones son rígidos y todas sus articulaciones de
revoluta están actuadas. Lo que implica que sus respectivas matrices
jacobianas tienen la misma estructura, dimensión y parámetros. El
retardo que induce el canal de comunicación se toma como nulo. La
tarea se desarrolla en el espacio de trabajo del sistema bilateral, por
lo que está libre de singularidades en los robots.

12 Universidad Politécnica del Valle de México
Donde el subíndice en (1) denota al robot maestro y el subíndices
denota al robot esclavo. Específicamente son las coordenadas
generalizadas de cada robot. son las matrices
de inercia, de Coriolis y el jacobiano del robot respectivamente,
kkkkkkkkkkkkkkkkson los vectores de términos gravitacionales, de
par de control y de la fuerza que el operador induce al manipulador
maestro, donde es el número de grados de libertad del maestro.
Por otra parte, en la dinámica del esclavo representa la
fuerza de reacción aplicada por el robot esclavo al entrar en contacto
con la restricción u objeto, donde k es el número de grados de
libertad del esclavo, para este sistema n=k debido a que los robots
son similares.
En este trabajo se considera que el ambiente con el que interactúa el
esclavo es una restricción bien definida y rígida (plano virtual). Esto
nos conduce a que cuando el efector final del robot manipulador
esclavo está en contacto con una superficie infinitamente rígida o
indeformable [7], su modelo dinámico se puede representar como:
El modelo dinámico del maestro y esclavo con las características antes
mencionadas y descrito en coordenadas articulares está dado por:
( ) ( , ) ( ) (1)TmM q q C q q q g q J Fm m m m m m m m m hτ+ + = +&& & &Maestro:
Esclavo: (2)( ) ( , ) ( ) T FsM q q C q q q g q Js s s s s s s s s eτ+ + = −&& & &
n, )( qm sq
,( ), ( , ) Jm m m mn nM q C q qm m×∈& R r
m1g(q ), , Fm h
nτ ×∈R
n1F k
e×∈R
( ) ( , ) ( ) TM q q C q q q g q Js s s s s s s s sτ λϕ−+ + =&& & &
( ) 0qϕ λ= ⇒ ∈ �
(3)
(4)
donde es la magnitud de la fuerza de reflexión que siente el
robot esclavo al estar en contacto con el ambiente (también conocida
como multiplicador de Lagrange), y representa la ecuación
de la restricción holónoma, la cual modela el objeto o superficie de
interacción en este caso un plano.
La representación analítica de se obtiene al expresar la ecuación
del plano tangente en el punto de contacto en términos de las
variables articulares, esto se logra aplicando la cinemática directa del
manipulador y derivando esta expresión con respecto del tiempo.
El hecho de que (4) se iguale a cero implica que se están considerando
restricciones homogéneas [8] y que se mapea un vector sobre el
plano normal al plano tangente que se presenta en el punto de
contacto. Para que el sistema (3) y (4) tenga solución el efector final
del manipulador debe coincidir con la superficie del objeto.
Las ecuaciones (3) y (4) constituyen un sistema formado por
ecuaciones diferenciales de segundo orden y ecuaciones algebraicas
de índice 3, juntos forman un sistema de ecuaciones diferenciales
algebraicas (DAE). Este tipo de sistemas se puede resolver de diversas
maneras, una de ellas es la solución directa de las ecuaciones con
un algoritmo de integración específico para ese tipo de problemas,
que generalmente se basan en integradores numéricos estándar que
funcionan bien en sistemas de ecuaciones diferenciales ordinarias [9].
En este trabajo se utiliza el método de multiplicadores de Lagrange
donde se reduce el índice del sistema (índice 1) derivando las
ecuaciones de restricción [10]:
λ ∈ �
( ) 0qϕ = ∈ R
( )J qϕ
22λ ϕ ζωϕ ω ϕ•• ••
= + + (5)
Es así como el modelo basado en restricción holónoma (3, 4) se
resuelve y permite el diseño de leyes de control independientes para
los espacios en posición y fuerza.
Principio de Ortogonalización El principio de ortogonalización está basado en la propiedad física
que establece que cuando se imprime fuerza sobre una superficie
rígida (restricción o ambiente), y al mismo tiempo se desplaza sobre
ella, el vector de velocidad generalizado está contenido en el plano
tangente al punto de contacto, mientras la aplicación de la fuerza es
perpendicular a dicho plano. Para lograr esta propiedad, la restricción
es manipulada a fin de generar dos subespacios ortogonales. Estas
transformaciones se utilizan para hacer la proyección ortogonal del
vector articular sobre un espacio dimensional (plano tangente Q)
al vector , por un lado, y la proyección ortogonal de la fuerza
de contacto sobre el vector , por el otro. El plano tangente
puede ser representado en forma matricial por:
q•
( )J qϕ( )J qϕ
( ) ( ) ( )T n nQ q I J q J qn n ϕ ϕ×= − ∈× + R (6)
donde In×n es la matriz identidad y es la pseudoinversa del
jacobiano de la restricción, es decir:
( )TJ qϕ+
1( ) ( )T T TJ q J J Jϕϕ ϕ ϕ−=+ (7)
Mientras el manipulador se mueva sobre la superficie se cumple lo
siguiente:
( ) ( ) 0 ( ) ( ) 0T TQ q J q y Q q J qϕ ϕ= =+ (8)

Universidad Politécnica del Valle de México 13
( ) ( ) ( )]...
... [ ( ) ( )]
[ q q k q q ki q qd dv p dT k F f k F fdf d if
Q k
Jϕ
τ• •− + − + −∫
− + −∫
=
+(10)
y además
( ) 0 ( )J q q y Q q q qϕ
• • •= = (9)
La descomposición ortogonal genera dos espacios vectoriales, uno en
fuerza y otro en velocidad, lo que permite controlar simultáneamente
tanto la fuerza como la posición, es decir, hace independientes el
control de fuerza y el de posición, cada uno de estos puede a su vez
emplear otra técnica de control individual, por ejemplo control PD,
control no lineal PID con modos deslizantes [11], etc.
Ley de controlA continuación se presenta un esquema de control simultáneo de fuerza
y posición de un robot que interactúa con un ambiente, superficie o
restricción indeformable. Un esquema similar fue inicialmente planteado
en [11], [12] para tareas en movimiento libre. Después fue extendido
a tareas de contacto (utilizando el principio de ortogonalización) y
validado experimentalmente en [13] con un robot industrial de 6 gdl.
En este último caso, la superficie de contacto era totalmente conocida.
En el esquema utilizado para la tarea de teleoperación se asume que
se conoce con exactitud el ambiente remoto con el cual se interactúa,
y el controlador para dicha tarea es de fuerza/posición basados en
el principio de ortogonalización el cuál requiere del conocimiento
exacto de la función geométrica del ambiente a fin de que pueda ser
calculado el vector normal .
El control utilizado en espacio articular del sistema bilateral que
permite un control independiente para posición y fuerza es [14] [16]:
( )J qϕ
donde el subíndice d indica la variable deseada, kv, kp y ki las
ganancias derivativa, proporcional e integral respectivamente para el
controlador de posición y kf, kif las ganancias proporcional e integral
para el controlador de fuerza.
El controlador (10) permite permutar controladores dependiendo si
el robot esclavo o maestro está en movimiento libre o restringido.
Para el robot esclavo el término en (3) es igual a (10), si está en
movimiento libre se utiliza un controlador PID, si hace contacto con
la restricción se utiliza el controlador (10).
Para lograr alta transparencia en el sistema de teleoperación, se
deben compensar la gravedad, efectos de Coriolis y fuerza centrífuga
en los controladores.
Para el robot maestro, el par de control en (1) resulta ser:
sτ
mτ
donde
( , , ) Tq q q J fm v vτ ϕ• ••
=Θ − (11)
( , , ) ( , ) ( )q q q Mq C q q q g q• ••
Θ = + +&& & & (12)
Debido a que el robot esclavo le refleja la fuerza originada al tocar
el plano (Fe), el maestro detecta una restricción virtual la cuál debe
controlar en espacio restringido aplicando una fuerza (fv) que iguale la
detectada. Es por ese motivo que en (11) se utilizan también DAE’s,
donde es el jacobiano de la restricción virtual que percibe el
operador. En (1) es la fuerza ejercida por el operador al maestro,
la cuál se divide en dos espacios, uno en posición (trayectoria) y otro
en fuerza utilizando también el principio de ortogonalidad, donde:
TvJϕ
TmJ Fh
( ) ( ) ( )]...
[ ( ) ( )]
[
...
h q q k q q ki q qd dv p dT k F f k F fe vf e v if
F Q k
Jψ
• •− + − + −∫
− + −∫
=
+ (13)
El controlador está diseñado tal que cuando el efector final del esclavo
hace contacto con la superficie éste refleja la fuerza de reacción hacia
el maestro. Entonces el maestro reproduce la fuerza de reacción
mediante una restricción virtual, dicha fuerza debe ser compensada por
el operador aplicando una fuerza de la misma magnitud en dirección
opuesta, dando así la sensación de fuerza de reacción remota.
Por último, se aprecia que el tipo de modelado de los sistemas implica
la conmutación entre un modelo en espacio libre y otro en espacio
restringido, sin embargo pese a dicha conmutación, los sistemas
presentan un comportamiento suave.
La ventaja del controlador propuesto es que permite desacoplar
controladores en espacios diferentes, como fuerza y posición, algo
que no es posible con un control de impedancia. Lo que conduce a
mostrar la transparencia de un sistema bilateral.
SimulaciónSe simula el sistema de teleoperación bilateral compuesto por 2
robots similares de 2 grados de libertad (gdl), como se ve en la Fig.
3, uno como maestro y otro como esclavo y un plano virtual como
restricción, el cuál está paralelo al eje x a una distancia de 0.759m con
el cuál interacciona el esclavo.
Las dimensiones y masas de los eslabones tanto del maestro como del
esclavo están dadas por:
Maestro y Esclavo:
L1=.750m, m1=1kg
L2=.250m, m2=.333kg

14 Universidad Politécnica del Valle de México
-0.2 0 0.2 0.4 0.6 0.8 1 1.2-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Eje x (m)
Eje
y (m
)
Trayectoria 'xy' impuesta por el robot Maestro al robot Esclavo
MaestroEsclavo
Fig. 5 Seguimiento de trayectoria sobre un plano del sistema bilateral teleoperado.
Fig. 3 Robot 2gdl (Maestro y Esclavo)
La comunicación del robot maestro hacia el robot esclavo se da
en posición cartesiana, mientras que la del robot esclavo al robot
maestro se da por la reflexión de la fuerza percibida por el robot
esclavo al tocar el plano, misma que es retroalimentada al operador
quien la siente y trata de controlarla, ver Fig 4. La plataforma de
simulación está basada en Simulink de MatLab con un método de
integración tipo “Ode 15 Stiff” para sistemas DAE.
Fig. 4 Diagrama a bloques del Sistema de Teleoperación Bilateral.
La trayectoria impuesta por el maestro consta de movimiento libre
en la que el robot esclavo alcanza la misma posición del maestro
(desde hasta ), posteriormente el maestro impone
el seguimiento de una línea recta hasta que el robot esclavo alcanza
el plano (desde rocio hasta ), una vez que hace contacto
con el plano el movimiento está restringido, se traza una línea recta
sobre el plano y el esclavo siente la fuerza del ambiente suavemente
hasta 3N (desde hasta ), esa misma fuerza la
retroalimenta hacia el maestro y éste hacia el operador que la trata de
controlar cerrando el lazo del sistema bilateral y siguiendo la misma
trayectoria hasta llegar a un punto en el mismo plano (desde roci
hastaxxxxxx ), ver Fig.5 .
2 t s= 2 t s=
2 t s= 40 t s=
40 t s= 40 t s=
40 t s= 40 t s=
El robot maestro trata de seguir la trayectoria que le impone el
operador, en donde en el t=0s se tienen los máximos errores en ‘xy’ de
0.4888m y 0.5665m respectivamente, los cuales comienzan a converger
a cero llegando en t=5s como se muestra en las Figuras 6a y 6b. Así
mismo el robot esclavo trata de seguir la trayectoria impuesta por el
robot maestro teniendo errores de posición en “xy” que convergen a
cero, ver Figuras 6c y 6d.
0 2 4 6-0.5
0
0.5
a) Tiempo (seg)
Err
or
(m)
Errores en posición xy. Robot Maestro
10 20 30 40-0.01
0
0.01
b) Tiempo (seg)
Err
or
(m)
0 2 4 6-0.5
0
0.5
c) Tiempo (seg)
Err
or
(m)
Errores en posición xy. Robot Esclavo
10 20 30 40-0.01
0
0.01
0.02
d) Tiempo (seg)
Err
or
(m)
Error xError y
Error xError y
Error xError y
Error xError y
Fig. 6 Errores de posición del Sistema Bilateral Teleoperado.
El control de posición y fuerza propuesto se basa en el principio de
ortogonalidad, por lo que se descompone en posición y fuerza para
movimiento libre y restringido. En las figuras 7 y 8 se observan las
respuestas de los controladores de posición y fuerza para el robot
maestro y esclavo. En estas figuras se aprecia la conmutación de dichos
controladores, antes de el sistema se encuentra en movimiento libre
donde el operador impone una trayectoria al robot maestro la cuál
trata de seguir mediante un controlador PID. En el hace contacto
con la restricción, donde ésta vale cero, es decir el efector final del
robot esclavo entra contacto con la restricción. Es por eso que en ese
instante se presenta la conmutación del controlador (10), en donde
el robot esclavo trata de retroalimentar al robot maestro la fuerza
detectada al estar en contacto con la restricción, éste a su vez detecta
una restricción virtual la cuál debe ser controlada hasta . En
el tiempo restante debido a que se mantuvo el sistema en contacto
con la restricción, el controlador (10) sigue trabajando para mantener
la fuerza y posición alcanzadas.
0 5 10 15 20 25 30 35 40
-2
0
2
a) Tiempo (seg)
Pa
r (N
.m)
Control de posición y fuerza. Robot maestro
0 5 10 15 20 25 30 35 40-5
0
5
10
15
20
b) Tiempo (seg)
Pa
r (N
.m)
Par q1Par q2
Par q1Par q2
Fig. 7 Control de fuerza y posición del Robot Maestro.
40 t s=

Universidad Politécnica del Valle de México 15
0 5 10 15 20 25 30 35 40-10
0
10
a) Tiempo (seg)P
ar
(N.m
)
Control de posición y fuerza. Robot esclavo
0 5 10 15 20 25 30 35 40-20
0
20
40
b) Tiempo (seg)
Pa
r (N
.m)
Par q1Par q2
Par q1Par q2
Fig. 8 Control de fuerza y posición del Robot Esclavo.
40 t s=
40 t s=40 t s=
En la figura 9 se puede observar la fuerza aplicada por el robot
esclavo sobre el plano virtual. En este caso se propone como fuerza
deseada, una curva que empieza en 0 N en y llega a 3 N
en , de manera suave por medio de un polinomio de tercer
grado, cuando llega a 3N se mantiene hasta . Cuando el
robot se acerca a la restricción se genera un efecto de rebote que
se interpreta como una fuerza negativa. En el caso del maestro, este
cerrará el lazo de teleoperación tratando de igualar la fuerza que le
retroalimenta el esclavo para mantenerse sobre el plano, sintiendo una
restricción virtual.
0 5 10 15 20 25 30 35 40-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Tiempo (seg)
Fuer
za (N
)
Fuerza en el Sistema Bilateral teleoperado.
Fuerza Maestro
Fuerza Esclavo
Fig. 9 Fuerza reflejada por el esclavo, alcanzada por el maestro [N].
El error en fuerza tanto del robot esclavo al estar en contacto con la
restricción, como el error de fuerza del maestro al retroalimentarle
dicha fuerza mediante el robot esclavo tratan de converger a cero,
como se aprecia en la Fig. 10. El robot maestro le retroalimenta dicha
fuerza también al operador para que la perciba y la pueda controlar.
0 5 10 15 20 25 30 35 40-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Tiempo (seg)
Fue
rza
(N)
Fuerza en el Sistema Bilateral teleoperado.
Fuerza Maestro
Fuerza Esclavo
Fig. 10 Error en fuerzas del sistema bilateral.
ConclusionesEn éste trabajo se mostró el seguimiento y convergencia simultánea de
los errores de fuerza y posición del sistema de teleoperación bilateral.
Se puede observar que el diseño del controlador permite que el efector
final del esclavo refleje la fuerza de reacción hacia el maestro cuando
se encuentra en contacto con la restricción. Entonces el maestro
reproduce la fuerza de reacción mediante una restricción virtual, dicha
fuerza es compensada por el operador permitiendo el lazo cerrado del
sistema bilateral. Los resultados muestran que el operador aplica una
fuerza de la misma magnitud pero en dirección opuesta.
Por último se aprecia que el tipo de modelado de los sistemas implica
la conmutación entre un modelo en espacio libre y otro en espacio
restringido, sin embargo pese a dicha conmutación los sistemas
presentan un comportamiento suave.
Se han realizado simulaciones para robots no similares, dichos
resultados han sido exitosos por lo que se está trabajando en la
plataforma experimental para la cuál se cuenta con dos robots, cuyos
diseños y construcción se detallan en [15] y [16].
Agradecimientos A la Universidad Politécnica del Valle de México.Referencias[1] Sheridan, T. B. (1993). “Space teleoperation through time delay: Review and
prognosis”. IEEE Transactions on Robotics and Automation, 9(5), 592–606.[2] Peter F. Hokayem, Mark W. Spong. “Bilateral teleoperation: An Historical survey”,
ELSEVIER Automática 42 2006 (pp 2035-2057). [3] H. Lee, “Adaptive controller of a Master-Slave System for Transparent
Teleoperation”, J. Robot. Sys., Vol. 15, pp. 465-475, 1998.[4] Melchiorri C., “Robotics Telemanipulation: General Aspects and Control Aspects”,
DEIS-LAR, Universita di Bolgna. Via Risorgimento 2, 40136 Bologna (pp. 1-139)[5] Arimoto, S., Liu, Y. H., and Naniwa, T., 1993, “Model-based adaptive hybrid control
for geometrically constrained robots”. Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, Georgia U.S.A. (pp. 618-623).
[6] N. Hogan, “Impedance control: An approach to manipulation: Part III-Aplications” ASME Journal of Dynamic Systems, Measurement and Control, Vol. 107, No. 1 (pp. 17-24), 1985.
[7] O. A. Domínguez, “Diseño e Integración de una Interfaz Háptica Activa Realista”, Tesis de Doctorado, CINVESTAV IPN, México DF., Departamento de Ingeniería Eléctrica, 2005.
[8] Parra-Vega, V., A. Rodríguez – Ángeles, S. Arimoto y G. Hirzinger (2001). “High precision constrained grasping with cooperative adaptive handcontrol”. Journal of intelligent and Robotic Systems 32, 235–254.
[9] K. E. Brenan, S. L. Campbell y L. R. Petzold (1996). “Numerical Solution of Initial Value Problems in Differential-Algebraic Equations”. SIAM.
[10] J. Baumgarte (1972). “Stabilization of constraints and integrals of motion in dynamical systems”. Comp. Meth. in Appl. Mech. and Eng. 1: 1–16.
[11] V. Parra Vega, L. G. Garcia Valdovinos, A. Castillo-Tapia, O. Dominguez Ramirez, “Sliding PID for Tracking in Finite Time for Robot Arms”, Proc. of the 11th Int. Conf. on Advanced Robotics (ICAR’03), pp. 1526-1531, Coimbra, Portugal, 2003.
[12] V. Parra-Vega, S. Arimoto, Y.H. Liu, G. Hirzinger & P. Akella, “Dyamic Sliding PID Control for Tracking of Robot Manipulators: Theory and Experiments”, IEEE Trans. on Robotics and Automation, Vol. 19, No. 6, pp. 967-976, 2003
[13] Castillo Tapia A., “Control Simultáneo de Fuerza y Posición de un Robot Industrial”, Tesis de Maestría, Depto. Ingeniería Eléctrica, Sección Mecatrónica, CINVESTAV-IPN, México D.F., Feb. 2002
[14] García Valdominos L. G., “Teleoperadores bilaterales no lineales de impedancia convergente con ambiente semiestructurado”, Tesis de Maestría, Depto. Ingeniería Eléctrica, Sección Mecatrónica, CINVESTAV-IPN, México D.F., Sep. 2006.
[15] David Muro M., Alejandro Rodríguez A., Carlos Cruz V., “Diseño, modelado y construcción de un manipulador redundante”, CIINDET, Cuernavaca Morelos, 2007.
[16] Rolando Cortés, Alejandro Rodríguez A., “Desarrollo y control de un sistema de teleoperación maestro esclavo no similar”, CIINDET, Cuernavaca Morelos, 2007.

16 Universidad Politécnica del Valle de México
ResumenLa aleación fue producida por fundición y enfriada en aire quieto a
temperatura ambiente, la microestructura dendrítica fue analizada
en un trabajo anterior[1]. Se obtuvieron veintiocho muestras de la
aleación que fueron sometidas a un tratamiento de homogenización
en el que se analizó la modificación de la microestructura[2], en
el presente trabajo, muestras de la aleación se sometieron a
envejecimiento a 290 ºC observando la generación de precipitados
de la aleación e identificando la fase ε por difractometría de rayos X.
IntroducciónLa descomposición espinodal de la fase de alta temperatura, la fase
β. Es la que genera la estructura de dos fases llamada tipo perlita,
por medio de una reacción eutectoide, como se manifiesta en los
estudios realizados por Chao et al.[3], la fase inestable a temperatura
ambiente se descompone en α y η:
β → α + η
Cambios microestructurales de laaleación Zn - 22% pAl - 2% Cu producidos por envejecimiento a 290 oC*
Figura 1: Diagrama de fases Zn – 22 % p Al – 2 % p Cu, sección vertical
cerca de donde se localiza el compuesto estequiométrico CuZn5. El
cobre agregado a la aleación en cantidades superiores al 2% genera
compuestos intermetálicos [3, 4], como la fase ξ, CuZn5, o CuZn4 y
la fase τ, Al4-Cu3-Zn. También tiene efectos en la microestructura
dendrítica y tipo perlita. Con los estudios realizados por diversos
investigadores se puede hacer un resumen de las fases que pudieran
presentarse, tabla 1.
*Saúl Rangel LaraIngeniería Industrial, Ciencia de Materiales y ProcesosUniversidad Politécnica del Valle de Mé[email protected]
*José L. Bernal PonceIngeniería Industrial, Ciencia de Materiales y ProcesosUniversidad Politécnica del Valle de Mé[email protected]
*Antonio de Ita de la TorreÁrea de Ciencias Materiales, Universidad Autónoma Metropolitana, [email protected]
Tabla 1: Fases presentes en las aleaciones Zn - 22 % p Al y Zn - 22 % p Al - 2 % Cu
También en el diagrama de fases ternario se indica la existencia
de otra fase cuya fórmula química es Al2Cu. Se aprecia en la tabla
anterior que todos los precipitados tienen cierto contenido de
cobre, a excepción de las fases α y η, se considera que en estas
fases el cobre está en disolución y sin formar intermetálicos. En las
reacciones presentadas por Chao et al. [5], se puede ver que la fase β
es inestable a temperatura ambiente, después del templado, ésta se
descompone en α y η, por otro lado señala que la fase ε es estable
alrededor de los 268 °C, y puede ser reemplazada por la fase estable
T’ durante el envejecimiento.
En el corte vertical del diagrama de fases ternario[4], figura 1, se observa que la aleación del presente experimento, cuya composición es Zn – 22 % p Al – 2 % p Cu, se encuentra muy
ε + β → α + η a276oC
ε + α → T’ + η a268oC
1. Desarrollo experimentalSe cortaron muestras transversales de cinco milímetros de espesor
a partir de los lingotes de fundición, se identificaron las muestras de
aleación ternaria con la letra B. Posteriormente se pulieron las caras
de las muestras con lijas de grano 80, hasta el 2000 y finalmente con
alúmina de 1 y 0.3 micras. Para revelar la estructura de la superficie
se utilizó un ataque químico con una solución de alcohol etílico (18
ml), ácido fluorhídrico (1 ml pureza 48 – 61 %) y ácido clorhídrico
(1 ml calidad industrial), durante cuatro segundos. La fotografía se
realizó en un microscopio óptico Olympus, se practicó el análisis
de rayos X en un difractómetro marca Siemens modelo D 500 con
tubo de rayos X de cobre, Como también se tomaron fotografías
en el microscopio electrónico de barrido ambiental, marca Phillips,

Universidad Politécnica del Valle de México 17
modelo XL 30 ESEM, con ventana de Berilio y detector de Silicio –
Litio, para realizar análisis de la microestructura, tanto como de la
composición de ésta, por medio del método de espectroscopia de
dispersión de energía (EDX).
2.ResultadosLa aleación debe comportarse como un material de solución
sólida sobresaturada a alta temperatura, inestable, la cual tenderá
a precipitar el exceso de soluto o de fase conforme se reduce la
temperatura. Los precipitados deben asumir microestructuras de
transición metaestable, con respecto a las estructuras de equilibrio.
Se pretende que el endurecimiento por envejecimiento produzca
una dispersión uniforme de un precipitado coherente, fino y duro
en una matriz blanda y dúctil.
Se efectuó el análisis de difracción de rayos X buscando las fases
Al4Cu3Zn, Al2Cu, CuZn4, CuZn5, confirmando la presencia de la fase
CuZn5, en las muestras B 18 a B 27, tratadas a la temperatura de
envejecimiento de 390 ºC.
Figura 2: Microestructura de la muestra B 7, 20 horas de envejecimiento a 290 °C, Zn – 22 % p Al – 2 % Cu, obtenida por microscopía óptica, MO.
La figura 2 muestra que la microestructura es de tipo laminar, como
en el caso anterior se encontraron pocas zonas donde la citada
microestructura no se formó, también se detectaron aquellas zonas
con alto contenido de cobre, que se forman a lo largo del periodo
de envejecimiento.
Figura 3: Microestructura de la muestra B 16, 60 horas de envejecimiento a 290 °C, Zn – 22 % p Al – 2 % Cu, obtenida por microscopía óptica, MO.
Zona de probable alto contenido de cobre
Se observa, por ejemplo la figura 3, muestra B 16 que corresponde
a sesenta horas de envejecimiento, que presenta únicamente
estructura laminar bien definida, aunque de mayor distancia
interlaminar que la mostrada en la figura 2, con una zona donde
posiblemente existe un alto contenido de cobre.
Figura 4: Microestructura de la muestra B 17, 65 horas de envejecimiento a 290 °C, Zn – 22 % p Al – 2 % Cu, obtenida por microscopía óptica, MO.
Después de sesenta y cinco horas de envejecimiento la
microestructura se observa con mayor facilidad y definición, tal es
el caso de la figura 4 correspondiente a la muestra B 17, donde se
observa que la distancia interlaminar aumenta en la mayor parte
del área cubierta por la microestructura, la distancia interlaminar ha
llegado a dos micras y, en algunas pequeñas zonas se reduce a menos
de media micra.
Figura 5: Microestructura de la muestra B 7, 20 horas de envejecimiento a 290 °C, BSE, Zn – 22 % p Al – 2 % Cu.
En la figura 5, obtenida por medio de electrones retrodispersados
se revela la presencia de posibles precipitados en una zona de alto
contenido de zinc, por otra parte, se observa en color oscuro la
presencia de una amplia porosidad, que no parece interferir en los
estudios realizados.

18 Universidad Politécnica del Valle de México
Por otra parte, se puede indicar que el análisis por difracción de
rayos X para la muestra B 22, se realizó dos veces, la segunda
girando la probeta noventa grados, para verificar que se presentaran
variaciones en las alturas de los picos. Lo que demuestra la no
existencia de textura en la muestra. En ambos casos se detecta la
presencia de las fases ε, η y α.
Conclusiones1. Después de la homogeneización en la aleación Zn – 22 % p Al – 2
% p Cu se encontraron precipitados de los tres metales en las
fronteras de grano, con una composición cercana a la fase CuZn5.
2. Los precipitados están rodeados por una fase con la misma
composición que la microestructura perlitica.
3. Después de un periodo de 65 horas de envejecimiento a 290 °C,
el precipitado se disuelve y la concentración de cobre aumenta en
esa zona.
4. La cantidad de perlita de 2 micras crece, mientras que la cantidad
de perlita de 0.5 micras se reduce.
Bibliografía1. Saúl Rangel, A. de Ita de la Torre, Leonardo R. Macias, “Elaboración de la aleación Zn – 22% p Al y
análisis de la microestructura generada cuando solidifica”, Innovación tecnológica UPVM, No. 1.2. José Luis Bernal, Saúl Rangel, “Análisis metalográfico y térmico diferencial en una aleación Zn – Al”,
Superficies y Vacio 23(S)1-3, agosto 2010.3. B. J. Li, C. G. Chao, Metallurgical and Materials Transactions 30A, 917(1999). 4. P. Villars, A. Prince, H. Okamoto, Al - Cu - Zn phase diagrams, Handbook of Ternary Alloy Phase
Diagrams v. 3 (ASM 1995), p 3424.5. B. J. LI, C. G. CHAO, “Phase transformation of Zn – 4 Al – 3 Cu Alloy during Heat treatment“,
Metallurgical and Materials Transactions 30 A, April 1999, p 917 - 923.
Figura 6: Microestructura de la muestra B 7, 20 horas de envejecimiento a 290 °C, BSE, Zn – 22 % p Al – 2 % Cu.
Precipitado 78.9% pZn 8.0% pAl 11.7% p Cu 1.5% p O
A mayor amplificación, figura 6, se observa que la fase del
precipitado parece estar rodeada por una microestructura diferente
a la laminar, semejante al caso anterior, también se observan dos
microestructuras de tipo laminar de distinta dimensión interlaminar,
de media micra y de dos.
La perlita crece hasta 2 micras.
Figura 7: Microestructura de la muestra B 17, 65 horas de envejecimiento a 290 °C, BSE, Zn – 22 % p Al – 2 % Cu.
La figura 7, muestra un área que contiene características de
microestructura laminar, sin embargo, en el área de alto contenido
de cobre no se observa bien definida alguna fase que pueda ser
señalada como precipitado, como en el caso de la figura 6, el largo
periodo de envejecimiento pudo haberlo disuelto.
Difractometría de rayos X
Figura 7: Sección del difractograma de la muestra B 18, 10 horas de envejecimiento, muestra los picos de dos planos de la fase ε, Zn – 22 % p Al – 2 % Cu.
Los difractogramas de las figuras 7 y 8 indican la presencia de la fase
ξ En relación al efecto del envejecimiento se puede agregar que se
forma con rapidez en las primeras horas, pero aumenta lentamente
después. Midiendo la altura relativa de los picos se calculó que
aproximadamente hay menos del 5 % de fase ε a 10 horas.
Figura 8: Sección del difractograma de la muestra B 27, 210 horas de envejecimiento, se identifican dos planos de la fase ε, Zn – 22 % p Al – 2 % Cu. Las alturas de los picos no están en la misma escala.

Universidad Politécnica del Valle de México 19

20 Universidad Politécnica del Valle de México
Análisis exergético del ciclo de refrigeración por compresión de vapor utilizando CO2*
ResumenEn este trabajo se presenta un análisis exergético a un ciclo de
refrigeración por compresión de vapor que utiliza como fluido
de trabajo el CO2 y que opera a régimen supercrítico, variando la
presión y temperatura a la salida del condensador. Encontrando que
para una tonelada de refrigeración, y una temperatura de entrada en
el evaporador de -10ºC, se tiene que la mejor eficiencia exergética
se obtiene cuando las condiciones a la salida del condensador son de
90 bares y 35ºC. Así mismo, también se presenta un análisis de las
irreversibilidades en el ciclo de refrigeración, obteniendo que en el
proceso de estrangulación se pierde aproximadamente una cuarta
parte de la exergía suministrada por el compresor.
IntroducciónEs interesante observar como una industria, que nació hace poco más
de un siglo, con la única finalidad de enfriar, a logrado llegar a ser la
auxiliar de tantas otras industrias y comercios transformando la vida
social de millones de seres, hasta el punto que se puede hablar con
sentido propio de la conquista del frío.
La refrigeración por compresión mecánica de vapor ha sido
fundamental para el desarrollo de la humanidad. Los inicios se pueden
ubicar en 1834 [3], cuando el ingles Jacob Perkins obtuvo la patente
de la primera máquina que fabricaba hielo. En los años de 1890 se
fabricaron máquinas pequeñas para la fabricación de hielo accionadas
por motores eléctricos y con control automático, tomando así el
predominio del mercado de estos equipos. A partir de 1930, los
sistemas de refrigeración por compresión mecánica de vapor se
volvieron eficientes, pequeños y económicos. En la segunda mitad del
siglo XX, el desarrollo de la refrigeración fue tan importante, que a la
fecha se encuentra presente en todas las actividades humanas, desde
las productivas, las de servicio, de salud, hasta de bienestar personal.
Este desarrollo en los sistemas de refrigeración es aprovechado en
múltiples áreas del ámbito industrial, teniendo una de las principales
aplicaciones en los sistemas de aire acondicionado, que establece un
ambiente de confortabilidad para el ser humano en lugares de trabajo,
transporte, diversión, etc.
Los pioneros de la industria frigorífica se basaron en la compresión
mecánica para obtener la producción del frío, pero ante el peligro
que presentaba el fluido entonces utilizado, éter, cambiándolo
por amoniaco hasta que a finales de los años 60s se utilizo los
clorofluorocarbonados.
Los sistemas de refrigeración por compresión de vapor son los más
utilizados en la industria frigorífica, tales como licuefacción de gas
natural, obtención de hielo, industrias farmacéuticas, refresqueras,
aire acondicionado automotriz, etc. Estos sistemas han operado con
refrigerantes clorofluorocarbonados como fluidos de trabajo, como
son los freones 12 y 22, el problema de este tipo de refrigerantes es la
contaminación que ejercen sobre el medio ambiente, principalmente la
destrucción de la capa de ozono y el calentamiento global de la tierra.
De acuerdo a los protocolos de Tokio y Montreal, se estableció
sustituir este tipo de refrigerantes por fluorocarbonados, que continúan
contribuyendo al deterioro del medio ambiente pero en menor grado.
Para los sistemas de aire acondicionado automotriz las investigaciones
sobre la utilización del fluido de trabajo enfriador, es enfocado a usar
el bióxido de carbono como refrigerante, impulsando la sustentabilidad
y desarrollo tecnológico a estos sistemas de refrigeración con CO2.[4]
*Martín Salazar P.División de Ingenieria Mecatrónica e IndustrialTecnológico de Estudios Superiores de [email protected]
*Raúl Lugo L.Departamento de Ingeniería de Procesos e HidráulicaUniversidad Autónoma Metropolitana [email protected]
*Alejandro Torres A.Departamento de Ingeniería de Procesos e HidráulicaUniversidad Autónoma Metropolitana [email protected]
*Rogelio Francisco A.Divisón de Ingeniería Mecánica ElectrónicaUniversidad Politécnica del Valle de Mé[email protected]

Universidad Politécnica del Valle de México 21
El refrigerante: R-744 como se conoce comercialmente al bióxido de
carbono, CO2, es un refrigerante natural, que no presenta toxicidad
e inflamabilidad, es barato, se encuentra ampliamente, su potencial
de calentamiento global es muy bajo, sin embargo, el impacto al
calentamiento global neto, cuando se utiliza como gas técnico es cero;
puesto que el CO2 es un gas de desecho de la producción industrial.
Además, cuenta con propiedades termodinámicas ventajosas, tales
como, un calor específico del líquido alto. [3]
Las limitaciones de todo sistema energético se encuentran
determinadas por las condiciones de diseño y ambientales. En los
sistemas de refrigeración las condiciones ambientales juegan un papel
muy importante ya que determinan el funcionamiento del sistema
de enfriamiento del fluido de trabajo, es decir de las condiciones de
operación del condensador. El problema de realizar el enfriamiento
en un ciclo de refrigeración que utiliza el CO2, es que su presión y
temperatura crítica es de 73.773 bar y 31 oC respectivamente.
Para temperaturas ambientales no mayores a 25ºC, en el condensador,
el rango de presiones de operación esta entre 70 y 110 bars, lo que
lleva a operar a condiciones supercríticas, esto se debe a la diferencia
de temperaturas que existe entre el medio ambiente y la temperatura
de condensación, que mínimo debe de ser de 10 a 15ºC, para que
exista una buena transferencia de calor.
El análisis exergético aplicado a los ciclos de refrigeración ha sido
desarrollado por Kotas, aplicándolo a ejemplos ilustrativos [1]. Recept
Yumrutas, también aplica esta metodología al ciclo de refrigeración por
compresión de vapor, utilizando como fluido de trabajo el amoniaco,
cuantificando las pérdidas de exergía, reportando, que las pérdidas de
temperatura y presión en los intercambiadores de calor incrementan
las pérdidas de exergía, además de reportar una eficiencia exergética
de 0.4, para temperaturas de operación de -10ºC en el evaporador y
de 30ºC en el condensador. [2]
En este trabajo se realiza un estudio exergético aplicando la
metodología desarrollada por Kotas, al ciclo de refrigeración por
compresión de vapor con una sola etapa de compresión utilizando
CO2 a condiciones supercriticas ya que se considera una temperatura
ambiente de 25ºC, variando la presión y temperatura de condensación,
cuantificando las perdidas de exergía.
Sistema de refrigeración por compresión de vaporEn las Figs. 1. (a), (b) y (c) se muestra el ciclo de refrigeración por
compresión de vapor con una sola etapa de compresión. La realización
del análisis termodinámico al ciclo de refrigeración se realiza para
condiciones de operación supercríticas, es decir, la presión y
temperatura de condensación son mayores a las condiciones críticas.
1
2 3
4
evaporador
Cámara de refrigeración
wC
condensador
5 6
(a)
(b)
(c)
Fig. 1. (a) Ciclo de refrigeración por compresión de vapor con una sola etapa, (b) Diagrama presión – entalpía a condiciones supericríticas y (c) Diagrama presión –entalpía a condiciones subcríticas.

22 Universidad Politécnica del Valle de México
El cálculo de los estados termodinámicos se realiza de la misma forma
como si se operara a condiciones subcríticas a excepción del estado
tres. En este estado la temperatura debe ser mayor a la ambiental de
10 a 15 ºC, entonces, como las propiedades termodinámicas están en
la región crítica se debe de iterar entre las presiones, manteniendo
constante la T3, y evaluando el COP, con la finalidad de encontrar
la presión de condensación a la cual se tiene el COP optimo, para la
temperatura requerida a la salida del condensador. Este procedimiento
se realiza a través de un método iterativo, ejecutado por un programa
de cómputo con plataforma Visual Basic 6.0.
Los balances energéticos se realizan aplicando la primera ley de la
termodinámica a cada uno de los equipos. En la Tabla 1 se muestran
los balances de energía realizados al ciclo de refrigeración por
compresión de vapor.
Tabla 1. Balances de energía del ciclo de refrigeración por compresión de vapor.
El balance exergético se realiza aplicando la expresión general del balance
de exergía, que contabiliza las transferencias de exergía que acompañan
a los flujos de masa y trabajos de flujo en las entradas y salidas.
El análisis del sistema de refrigeración se realiza considerando al sistema
en estado estacionario y que no se tiene cambio de volumen. Los
balances de exergía se muestran en la Tabla 2.
Tabla 2. Balances de exergía del ciclo de refrigeración por compresión de vapor.
En este análisis, el estado de referencia del CO2 se considera a la presión
de 50.68 bar y a 15 °C de temperatura, los valores correspondientes
para el estado de referencia son, h0=416.85 kJ/kg, s0=1.7501 kJ/kg K y
v0=0.00625 m3/kg.
Análisis exergético al ciclo de refrigeraciónEl análisis exergético al ciclo de refrigeración por compresión de vapor
se realiza a régimen supercrítico considerando una temperatura en el
evaporador de -10 °C, potencia frigorífica 1 TR y la eficiencia isentrópica
del compresor de 0.88.
En la Fig. 2 se muestra el diagrama exergía – entalpía para el ciclo de
refrigeración. En esta figura se presenta los estados de exergía y entalpía
del ciclo, donde se observa que el mayor contenido de exergía se tiene
en el estado 2, y el menor contenido de exergía se tiene en los estados
de entrada y salida del evaporador. El proceso de expansión, donde
se tiene la menor diferencia de exergía es el 3’ a 4’ que corresponde a
una presión condensación de 90 bar. Adicionalmente se observa en la
figura la variación en el efecto refrigerante y de trabajo suministrado al
compresor, cuando se varían las presiones de condensación. Al evaluar

Universidad Politécnica del Valle de México 23
Fig. 2. Exergía –entalpía para el ciclo de refrigeración por compresión de vapor para diferentes presiones en el condensador.
Fig. 3. Exergía –entalpía para el ciclo de refrigeración por compresión de vapor para una T3 = 35ºC y T3 = 40ºC.
los estados termodinámicos en las ecuaciones de la Tabla 1, se obtiene
que el máximo COP para las condiciones establecidas, se tiene para la
presión de 90 bares en el condensador.
Fig. 4. Eficiencia exergética a diferentes presiones de condensación.
En la Fig. 3 se muestra el ciclo de refrigeración para temperaturas a la
salida del condensador de 35 y 40ºC, a una presión de 90 bares, donde
se muestra que el estado 3 a 40ºC se tiene una mayor cantidad de
exergía pero al estrangularla para obtener el estado 4 se pierde una
gran cantidad de la misma, de la misma forma que se reduce el efecto
refrigerante, por lo tanto, al incrementar 5 ºC la temperatura en el
condensador, no se obtiene un incremento en la eficiencia exergética
como se muestra en la Fig. 4.
En la Fig. 4 se muestra la eficiencia exergética a diferentes presiones
de condensación para temperaturas a la salida del condensador de
30 y 40ºC. Para T3=35ºC, la eficiencia exergética alcanza su máximo
valor a 90 bares, mientras que para T3=40ºC, el valor máximo se
alcanza a 100 bares.
Fig. 5. Diagrama de Grassmann para el ciclo de refrigeración a p3 = 90 bar y T3=35°C.
En la Fig. 5 se muestra el diagrama de Grassmann las pérdidas de
exergía en el ciclo de refrigeración a p3 = 90 bar y T3=35°C. Las mayores
pérdidas de exergía se ocasionan en el compresor -motor eléctrico,
32.5%; y debido a las condiciones supercríticas de operación se tiene
que el condensador tiene el 27.6% de exergía pérdida, y en tercer lugar
se tiene la válvula de estrangulación con el 23.52%, a consecuencia de
la estrangulación de una alta presión, 90 bares a 26.37 bares, lo que
ocasiona un gran pérdida. En el evaporador no se tienen pérdidas, a
causa de la baja cantidad de exergía a la cual opera el evaporador, dando
como resultado que solamente el 16.347% de la exergía suministrada
por el compresor es aprovechada en la cámara frigorífica.
Fig. 6. Diagrama de Grassmann para el ciclo de refrigeración a p3 = 100 bar y T3=40°C.

24 Universidad Politécnica del Valle de México
Fig. 7. Irreversibilidad en el compresor - motor eléctrico a diferentes presiones de condensación para una T3=35ºC.
Para el ciclo de refrigeración a T3=40°C, cuando se varían las presiones
de condensación, la mejor eficiencia exergética se obtiene a p3 = 100
bar. En la Fig. 6 se muestran las pérdidas de exergía de este ciclo. El
comportamiento de las pérdidas es similar al ciclo de la Fig. 5, pero
el incremento de 5ºC en la temperatura de salida del condensador
incrementa 2% las pérdidas de exergía en la expansión del CO2 en
la válvula de estrangulamiento, lo que ocasiona en gran parte la
disminución de la eficiencia exergética hasta el valor de 13.347%.
Fig. 8. Irreversibilidad en el compresor - motor eléctrico a diferentes presiones de condensación para una T3=40ºC.
En las Fig. 7 y 8 se muestran las pérdidas de exergía cuando se varían
las condiciones de operación en el condensador. La tendencia de las
pérdidas de exergía en el compresor - motor eléctrico, es similar para
ambas temperaturas, la diferencia, es que al incrementar 5ºC la T3,
la potencia eléctrica suministrada al compresor se incrementa, por
ejemplo para la presión de 90 bar, este incremento representa el 40%,
aunque los porcentajes de las pérdidas varían 1%.
Fig. 9. Irreversibilidad en el ciclo de refrigeración a diferentes presiones de condensación para una T3=35ºC.
En la Fig. 9 se muestran las pérdidas de exergía en el ciclo de
refrigeración a diferentes presiones de condensación para una T3=
35ºC. Para presiones en el condensador menores a 80 bares en la
región supercrítica, las mayores pérdidas de exergía se ocasionan en
la válvula, debida a que se tiene en este proceso una gran diferencia de
exergía que se pierde en la estrangulación. Al seguir incrementando
la p3, se tiene que las mayores pérdidas se localizan en el compresor
– motor eléctrico, aunque las irreversibilidades en el condensador
se incrementan en mayor porcentaje. A p3=105 bares, las mayores
pérdidas se encuentran en el condensador, ocasionado por la gran
cantidad de exergía que se pierde al enfriar el CO2.
Fig. 10. Irreversibilidad en el ciclo de refrigeración a diferentes presiones de condensación para una T3=40ºC.
Para las condiciones de operación en el condensador de T3=40 ºC,
para presiones de condensación inferiores a 90 bares en la región
supercrítica, la mayor irreversibilidad se tienen en el compresor –
motor eléctrico. A partir de 90 bares, al incrementarla, las pérdidas
de exergía en los equipos del ciclo de refrigeración resultan casi de las
mismas dimensiones, aunque las mayores irreversibilidades suceden en
la válvula de estrangulación.

Universidad Politécnica del Valle de México 25
NomenclaturaCOP coeficiente de operación; [-],h entalpía específica; [kJ/kg], I irreversibilidad; [kW],meva flujo másico; [kg/s],p presión; [bar],PELE potencia eléctrica; [kW],qo efecto refrigerante; [kJ/kg],Q0 carga térmica; [kW],s entropía específica; [kJ/kg K],T temperatura; [oC],v volumen específico; [m3/kg],w trabajo; [kJ/kg],
Letras griegasε exergía especifica: [kJ/kg],η SIC eficiencia isoentrópica del compresor; [-],η ELE eficiencia eléctrica; [-].η EXE eficiencia exergética; [-].η ME eficiencia mecánica; [-].
Subíndices0 referencia,C-ME compresor motor eléctrico,Cond condensador,Eva evaporador.f fricción del pistón y cilindro,m-elec electromecánicasVAL válvula
ConclusionesEl ciclo de refrigeración por compresión de vapor con una sola etapa
de compresión utilizando CO2 y operando a régimen supercrítico,
muestra un comportamiento diferente a los ciclos que trabajan en
régimen subcrítico, ya que las altas presiones a la cual se debe trabajar en
el condensador ocasionan altas pérdidas en la válvula de estrangulación,
lo que ocasiona una disminución en la eficiencia exergética del ciclo.
Así mismo, las altas pérdidas de exergía, ocasionadas en el compresor
– motor eléctrico y condensador, resultan ser muy altas comparadas
con los ciclos que operan con fluidos de trabajo como por ejemplo,
el HF-134a entre otros, debido a las características del fluido, ya que
con el CO2 se tiene que trabajar a condiciones supercríticas, por lo
tanto, las eficiencias exergéticas resultan ser inferiores a la de los ciclos
de refrigeración que operan con fluidos convencionales a las mismas
condiciones de operación.
Referencias[1] T.J kotas. The exergy Method of Termal Plant Anylisis. Ed Butterworths. 1985.
[2] Recep Yumruta, Mehmet Kunduz, Mehmet Kanoglu. 2 (2002) 266–272. Exergy analysis of vapor compression refrigeration systems. Exergy, an International Journal. 2002 Éditions scientifiques et médicales Elsevier SAS.
[3] Clodic D., Chang Y.S., Pougin A.M. Evaluation des fluides frigorigènes à faible GWP pour le froid domestique et commercial, les transports réfrigérés et la climatisation automobile. Mai, 1999.
[4] United Nations Environment Programme. Protecting the Ozone Layer. 2001.
[5] Vetter F.1, Memory S.2. Automotive AC/HP Systems Using R744 (CO2). European Central Research Modine Europe GmbH, Dept. ENT. 2 Research & Development Modine Manufacturing Co. Filderstadt, Stuttgart, Alemania. Racine, Wisconsin, E.U. 2001.
[6] National Institute Standards and Technology. Thermophysical Properties of Fluid Systems. Standard Reference Database Number 69. Estados Unidos. Marzo, 2003.
[7] Evaluation of the Performance Potential of CO2 as a Refrigerant in Air-To-Air Air Conditioners and Heat Pumps: System Modeling and Analysis. Air-Conditioning and Refrigeration Technology Institute. Arlington, Virginia, E.U. Diciembre 2003.

26 Universidad Politécnica del Valle de México
Contruyendo un SistemaEstatal de Innovación
Historia de una alianza entre el COMECyT y el BID
Era noviembre del año 2008. En una de tantas reuniones fuera del Estado
de México, e inmerso en debates con colegas del país, el doctor Elías
Micha, director general del COMECyT, se propuso crear un Sistema
Estatal de Innovación, lo cual parecía muy ambicioso pero viable, pues
incluso existen instancias internacionales que apoyan este tipo de causas,
por ejemplo el Banco Interamericano de Desarrollo (BID).
El BID lazó una convocatoria y más de un gobierno se interesó; sin
embargo, poco a poco se fueron quedando en el camino; no fue el
caso del COMECyT que siguió firme en el proceso.
El gran día llegó y en diciembre de 2010, ambos organismos firmaron
el acuerdo de colaboración que involucra dos millones de dólares,
aportados entre el BID, COMECyT y CONACyT. Así, el Estado de
México se convirtió en la primera entidad de la República Mexicana en
participar en una iniciativa de este tipo, y en uno de los cuatro países
latinoamericanos involucrados en este programa piloto, además de Chile,
Colombia y Brasil. Se espera que esta experiencia se pueda replicar en
otras partes del país y en diversas entidades de América Latina.
Perfil del Edomex
Si te ha surgido la duda de qué llevó al BID a otorgar un proyecto de
este tipo al COMECyT, quizás venga acompañada de otra pregunta:
¿qué beneficios traerá para el estado? La respuesta es compleja
pero muy convincente. Empecemos por las razones del organismo
internacional.
Según un estudio preliminar efectuado por el BID, las empresas
mexicanas y en particular las PyMES “exhiben hoy un alarmante
nivel de estancamiento en su productividad y competitividad, en
gran parte debido a la baja capacidad que poseen para introducir y
gestionar actividades innovadoras”. También se ofrecen datos como
los presentados en la página siguiente.
Inversión para crear el Sistema Estatal de Innovación (dólares)
BID
COMECyT
CONACyT
TOTAL
920 045.00
917 960.00
134 995.00
1 973 000.00
Extraído de la Revista Órbita Año lll Núm. 10Octubre-diciembre 2010.Boletín informativo COMECyT.

Universidad Politécnica del Valle de México 27
Aunado a estas cifras, el BID concluyó que desde finales de los años
90 “las políticas de ciencia y tecnología se han concentrado, en gran
medida, en la investigación científica pública, y sólo en los últimos años
han comenzado a poner mayor énfasis en el desarrollo tecnológico
de las empresas y en la investigación aplicada”.
También, con información de la OCDE (2008) sobre las políticas
de innovación en México, señala que uno de los problemas más
frecuentes de los programas de apoyo a la innovación en México
reside en la dificultad que tienen las firmas regionales, particularmente
las PyMES, en acceder a los beneficios derivados de los programas.
Por último, se menciona que “aunque se han logrado avances
significativos en el fomento de la innovación entre las grandes
empresas mexicanas, promoviendo su interacción con instituciones
académicas y centros de investigación, esta dinámica no se ha
conseguido reproducir a nivel de las PyMES presentes en los estados
de la federación y en el Estado de México”.
A COMECyT, le sobran motivos…En el discurso que el doctor Elías Micha dictó con motivo de la firma
del acuerdo con el BID, afirmó que el proyecto de Sistemas Estatales
de Innovación permitirá dar pasos importantes para transitar hacia la
sociedad del conocimiento.
Al respecto, el Lic. Enrique Peña Nieto presentó las conclusiones
de los Foros de Reflexión del Bicentenario y estableció como uno
de los cinco puntos de la agenda política el tránsito a la sociedad
del conocimiento. Señaló con precisión algunos elementos clave
para lograrlo, como la necesidad de impulsar la mejora del sistema
educativo, triplicar la inversión en ciencia y tecnología e innovación;
e incluso se refirió específicamente a la creación de mecanismos de
financiamiento para la innovación.
Además, Elías Micha mencionó que un sistema de innovación
efectivo logrará, entre otras cosas, una adecuada inserción del sector
empresarial en el contexto global que estamos viviendo.
EL PAÍS
ESTADO DE MÉXICO
Fuente: http//idbdocs.iadb.org/wsdocs/getdocument.aspx?docnum=35336021

28 Universidad Politécnica del Valle de México
A continuación presentamos el cúmulo de beneficios de este
proyecto, que tendrá un periodo de ejecución de 36 meses y de
desembolso de 42 meses.
lll. Monitoreo, sistematización y difusión de las experiencias
Objetivo: Definir un modelo flexible o identificar las mejores
prácticas de este proyecto y replicarlas en otros estados del país que
estén interesados.
Mecanismos: Contratar servicios de consultoría para el desarrollo
de metodologías de monitoreo y la evaluación del proyecto, asignar
responsables en CONACyT, revisar experiencias internacionales en
la materia, sistematizar la experiencia del Estado de México y realizar
actividades de difusión, entre otros.
Resultados: Metodología para un sistema de monitoreo y para la
evaluación del proyecto, asignación de responsables por parte del
CONACyT, designación de personal para asimilar la experiencia,
estudio sobre experiencias internacionales, etcétera.
Elías Micha mencionó que sin duda, esta iniciativa permite consolidar
una alianza de orden estratégico para dar un salto importante en
materia de innovación, y propiciar que en el Estado de México,
participe un mayor número de empresas en la economía mundial,
no sólo con la satisfacción de haber fabricado, sino con el orgullo de
haber creado nuevos productos o servicios en la entidad.
l. Reforzamiento institucional para el diseño de planes de innovación estatal
Objetivo: Fortalecer los mecanismos de interlocución público-
privada entre los actores del Sistema Estatal de Innovación.
Mecanismos: Financiar actividades de consultoría de asistencia
técnica y capacitación.
Resultados: Institucionalidad público-privada, 25 profesionales
capacitados para el diseño e implementación de políticas, estudio
de las mejores prácticas internacionales en la creación de agendas
estatales de innovación y una agenda estatal de la innovación.
ll. Apoyo a las inversiones de las PyMES en innovación
Objetivos: Identificar problemas y soluciones tecnológicas de las
PyMES y aumentar en la inversión de las empresas de los estados,
particularmente de las PyMES, en proyectos de innovación.
Mecanismos: Contratar servicios de consultoría para reunir
gestores de redes sectoriales de innovación, realizar talleres o
actividades de identificación de retos tecnológicos, brindar asistencia
técnica para la formulación de propuestas de innovación y asignar
recursos a proyectos de innovación.
Resultados: Identificación de los retos tecnológicos de 100 PyMES
locales, ocho talleres o actividades de identificación, participación de
35 PyMES en ocho proyectos colectivos de innovación, un taller de
análisis de impacto de los proyectos realizados, aumento de 50% de
inversión de las PyMES participantes.