Técnicas analíticas instrumentales - Módulo QI-QBai.qi.fcen.uba.ar/teoricos/ruido.pdf · Dark...
15
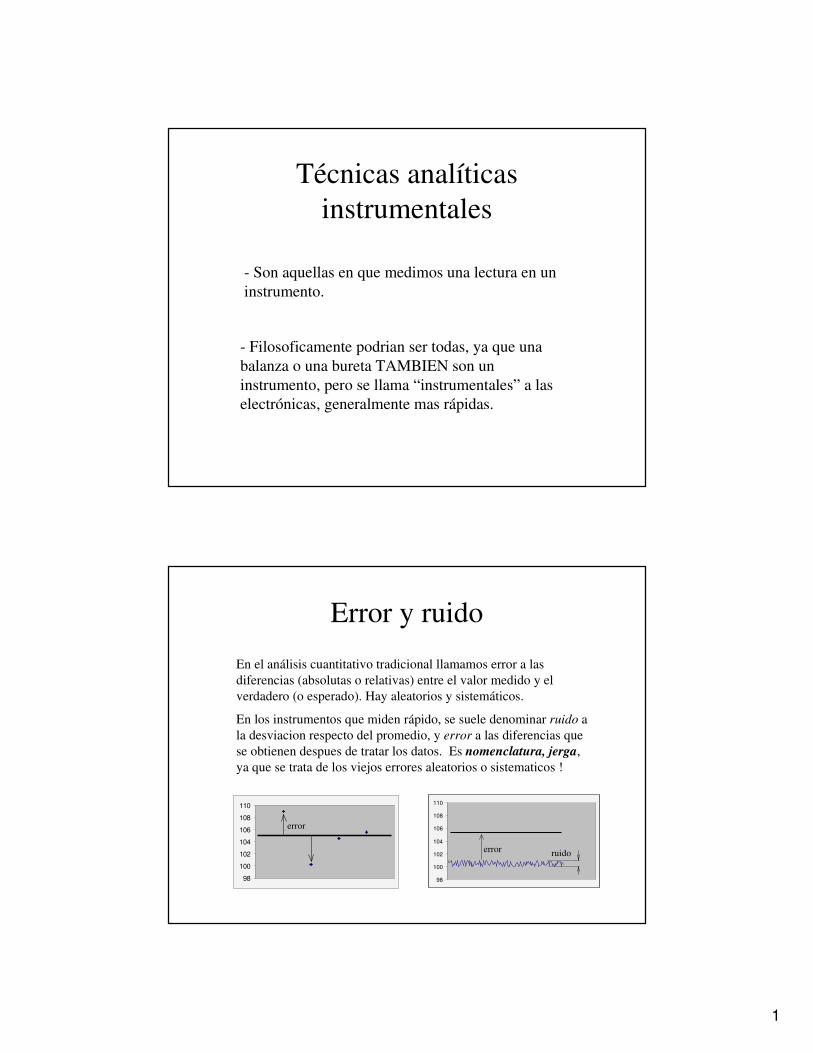
1 Técnicas analíticas instrumentales - Son aquellas en que medimos una lectura en un instrumento. - Filosoficamente podrian ser todas, ya que una balanza o una bureta TAMBIEN son un instrumento, pero se llama “instrumentales” a las electrónicas, generalmente mas rápidas. Error y ruido En el análisis cuantitativo tradicional llamamos error a las diferencias (absolutas o relativas) entre el valor medido y el verdadero (o esperado). Hay aleatorios y sistemáticos. En los instrumentos que miden rápido, se suele denominar ruido a la desviacion respecto del promedio, y error a las diferencias que se obtienen despues de tratar los datos. Es nomenclatura, jerga, ya que se trata de los viejos errores aleatorios o sistematicos ! 98 100 102 104 106 108 110 error 98 100 102 104 106 108 110 error ruido
-
Upload
duonghuong -
Category
Documents
-
view
218 -
download
0
Transcript of Técnicas analíticas instrumentales - Módulo QI-QBai.qi.fcen.uba.ar/teoricos/ruido.pdf · Dark...
1
Técnicas analíticas
instrumentales
- Son aquellas en que medimos una lectura en un
instrumento.
- Filosoficamente podrian ser todas, ya que una
balanza o una bureta TAMBIEN son un
instrumento, pero se llama “instrumentales” a las
electrónicas, generalmente mas rápidas.
Error y ruido
En el análisis cuantitativo tradicional llamamos error a las
diferencias (absolutas o relativas) entre el valor medido y el
verdadero (o esperado). Hay aleatorios y sistemáticos.
En los instrumentos que miden rápido, se suele denominar ruido a
la desviacion respecto del promedio, y error a las diferencias que
se obtienen despues de tratar los datos. Es nomenclatura, jerga,
ya que se trata de los viejos errores aleatorios o sistematicos !
98
100
102
104
106
108
110
error
98
100
102
104
106
108
110
error ruido
2
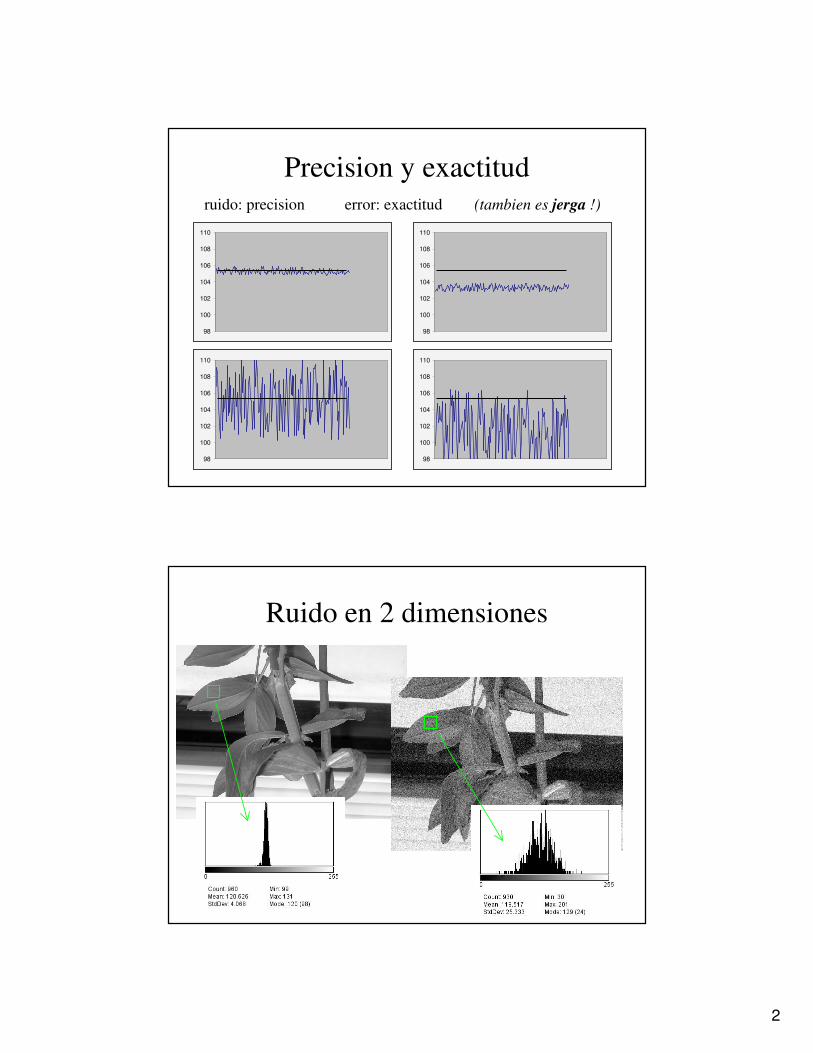
Precision y exactitud
98
100
102
104
106
108
110
98
100
102
104
106
108
110
98
100
102
104
106
108
110
98
100
102
104
106
108
110
ruido: precision error: exactitud (tambien es jerga !)
Ruido en 2 dimensiones

3
Relacion señal / ruido
En toda medición, la señal es lo que
queremos medir y el ruido es aquello que
molesta, sea lo que sea.
Queremos aumentar la relación S/N.
Analógico vs. Digital
Analógico: es la comparación contra una escala (la
mayoria de las veces lineal). Casi siempre se basa en la
capacidad del ojo-cerebro para comparar LONGITUDES.
En principio tiene precision infinita.
En la práctica, la precision está dada por la capacidad de
diferenciar una longitud de otra con certeza.
Digital: es la entrega de un CODIGO, cuya estructura
no tiene nada que ver con la medida en si, sino que es
una convencion humana. Por ejemplo, “44”. Otro
ejemplo: “cuarenta y cuatro”. Otro ejemplo: “XLIV”.
Otro más: “forty four”. La precision máxima está
dada por el mismo código. (En este caso, una unidad)
4
La naturaleza nos parece
(generalmente) analógica
Una concentración parece contínua. Una cantidad de
masa parece contínua. Una absorbancia parece
continua. En realidad no lo son (ya que atomos,
moleculas, fotones son en realidad discretos), pero
son tan pequeños que lo tratamos como continuo. Lo
continuo es analógico.
Contraejemplos: single molecule spectroscopy;
contador de fotones; contador “geiger” en analisis
radiactivo; número de particulas detectadas en
espectroscopias de masa.
Ventajas de lo digital
Guardar y transferir los datos con exactitud. Es posible
hacerlo sin que se deteriore la señal.
La lectura puede automatizarse.
Si el que lee es un humano, la lectura no depende de
errores de apreciación (paralaje, etc.)
Desventajas:
Lectura errónea por dislexia temporaria.
por ejemplo: confundir 428 con 482 al anotar.
Dificultad para que el operador determine en
tiempo real si una magnitud aumenta o disminuye.
5
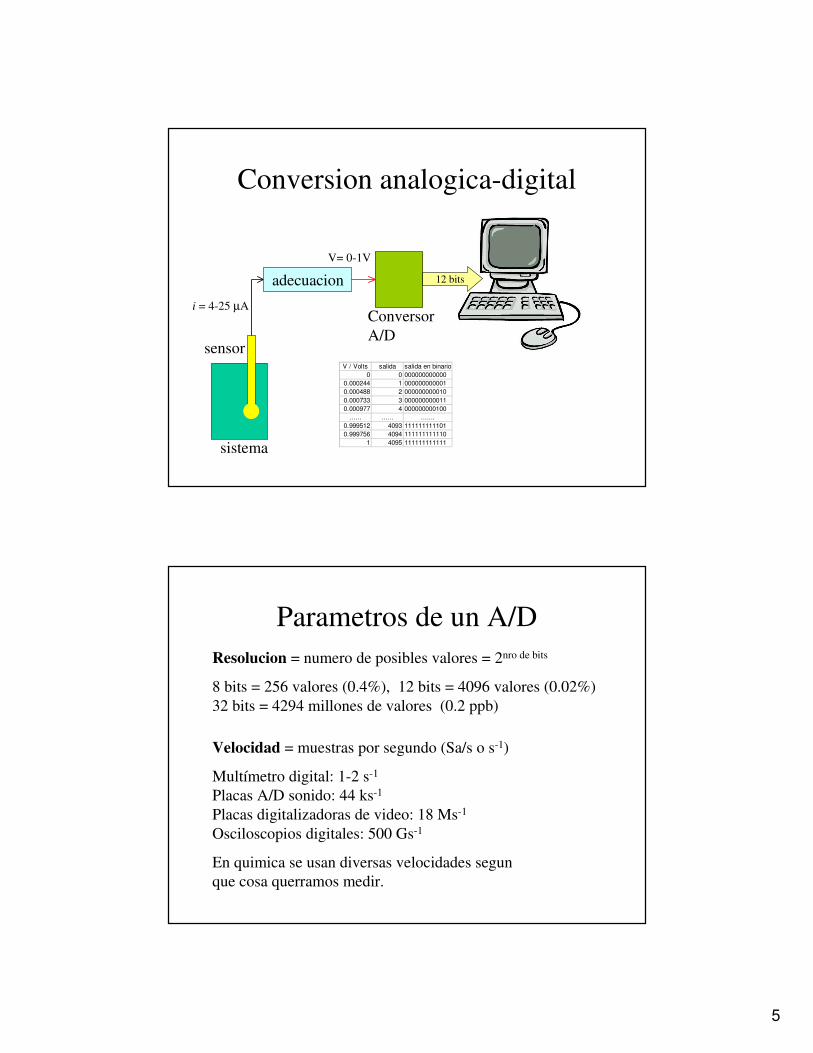
Conversion analogica-digital
sistema
sensor
adecuacion
Conversor
A/D
12 bits
i = 4-25 µA
V= 0-1V
V / Volts salida salida en binario
0 0 000000000000
0.000244 1 000000000001
0.000488 2 000000000010
0.000733 3 000000000011
0.000977 4 000000000100
...... ...... .......
0.999512 4093 111111111101
0.999756 4094 111111111110
1 4095 111111111111
Parametros de un A/D
Resolucion = numero de posibles valores = 2nro de bits
8 bits = 256 valores (0.4%), 12 bits = 4096 valores (0.02%)
32 bits = 4294 millones de valores (0.2 ppb)
Velocidad = muestras por segundo (Sa/s o s-1)
Multímetro digital: 1-2 s-1
Placas A/D sonido: 44 ks-1
Placas digitalizadoras de video: 18 Ms-1
Osciloscopios digitales: 500 Gs-1
En quimica se usan diversas velocidades segun
que cosa querramos medir.
6
Ruidos (o errores) que solamente
aparecen en los sistemas digitales
“error ± 1 LSB” (least significant bit). Es la incerteza
digital del instrumento. Dice 14.32, pero podria ser 14.31
o 14.33, MAS ALLA de otras fuentes de error.
“error de redondeo” Se produce al utilizar datos digitales
en formato de baja resolucion numerica (pocos bits).
Aunque el resultado final sea de 8 bits (aprox 0.4%), la
aritmetica para llegar a ese resultado precisa al menos 12
bits, y mejor aun 16 o 32 bits.
De donde viene el ruido ?
Mas ruido es menos repetibilidad, menos sensibilidad,
mayor limite de detección. ¿ De donde viene ?
Las fuentes de ruido son muchisimas:
- electrostatico/electromagnetico de 50 Hz
- mala regulacion de fuentes de alimentacion
- los mismos componentes electronicos
- ruido real del sistema a medir
- el primero es generalmente el mayor, y por suerte el
mas facil de solucionar.
7
De donde viene el ruido ?
- electrostatico/electromagnetico de 50 Hz
- Cables mal blindados.
- Malas conexiones de tierra.
- Transformadores en las cercanias del equipo.
- Cercanías de emisores de radio (incluído celulares!)
- Placa A/D dentro de la computadora y mal blindada.
- No usar jaulas de Faraday en el sistema a medir.
De donde viene el ruido ?
- mala regulacion de fuentes de alimentacion
- Algunos equipos de bajo costo no regulan bien los
voltajes internos. La mala regulacion de estos voltajes
aparece en las mediciones. Hay que modificar el
equipo, o cambiarlo por otro.

8
De donde viene el ruido ?
- los mismos componentes electronicos
aun en un equipo de buena calidad, la naturaleza
discreta de los electrones y la tecnología de
fabricacion de los semiconductores y demas
componentes electronicos producen un ruido de fondo
que siempre está, aunque mejora a medida que se
perfecciona la tecnología.
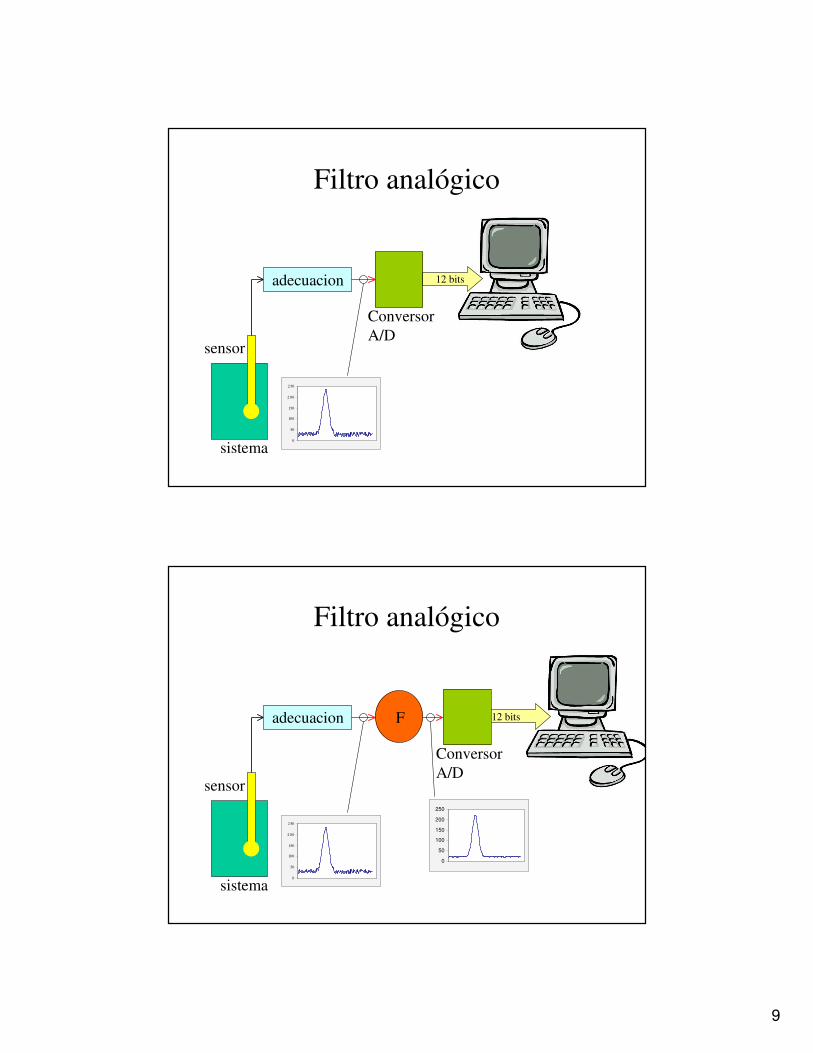
Eliminacion del ruido
Si ya se redujo al mínimo el ruido electrostático /
electromagnético, y no se quiere cambiar el equipamiento,
se puede bajar el ruido de dos formas:
-Filtros analógicos
-Filtros digitales
Filtran las frecuencias del ruido, tratando de no tocar las
frecuencias de la señal. Se colocan ANTES del A/D.
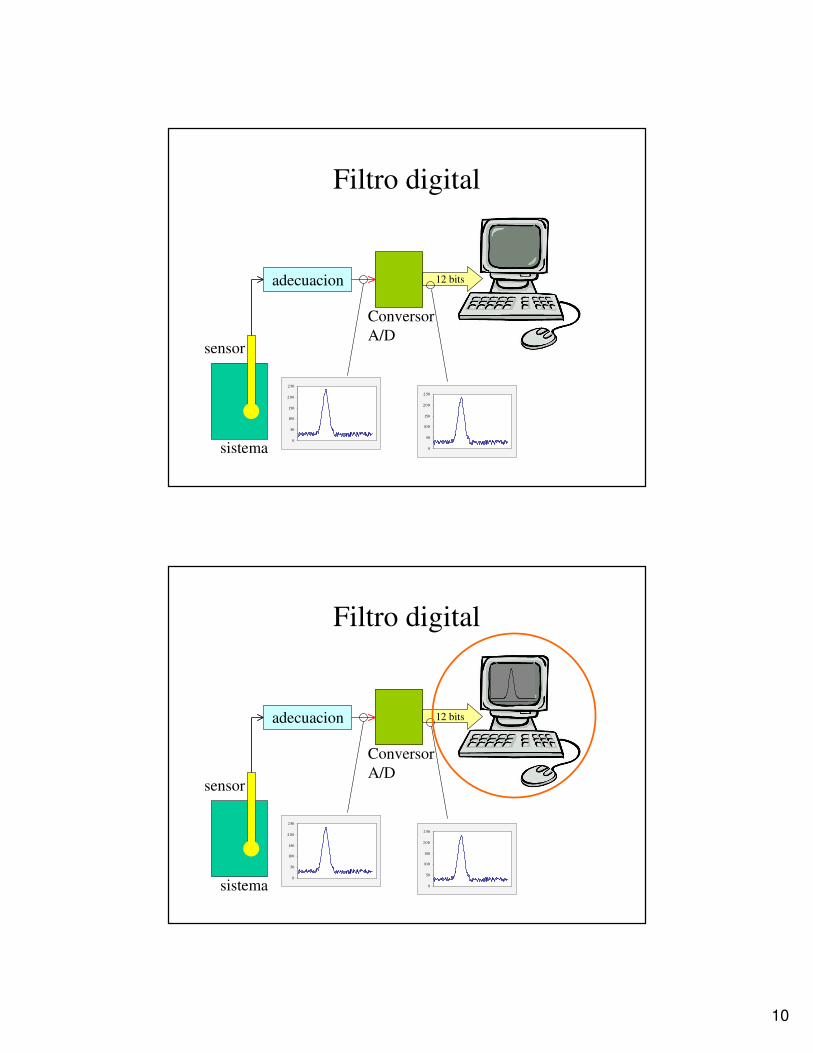
Muchos tipos diferentes. Van DESPUES del A/D o se
aplican en diferido directamente en la computadora.
9
Filtro analógico
sistema
sensor
adecuacion
Conversor
A/D
12 bits
0
50
100
150
2 00
2 50
Filtro analógico
sistema
sensor
adecuacion
Conversor
A/D
12 bits
0
50
100
150
2 00
2 50
0
50
100
150
200
250
F
10
Filtro digital
sistema
sensor
adecuacion
Conversor
A/D
12 bits
0
50
100
150
2 00
2 50
0
50
100
150
2 00
2 50
Filtro digital
sistema
sensor
adecuacion
Conversor
A/D
12 bits
0
50
100
150
2 00
2 50
0
50
100
150
2 00
2 50
11
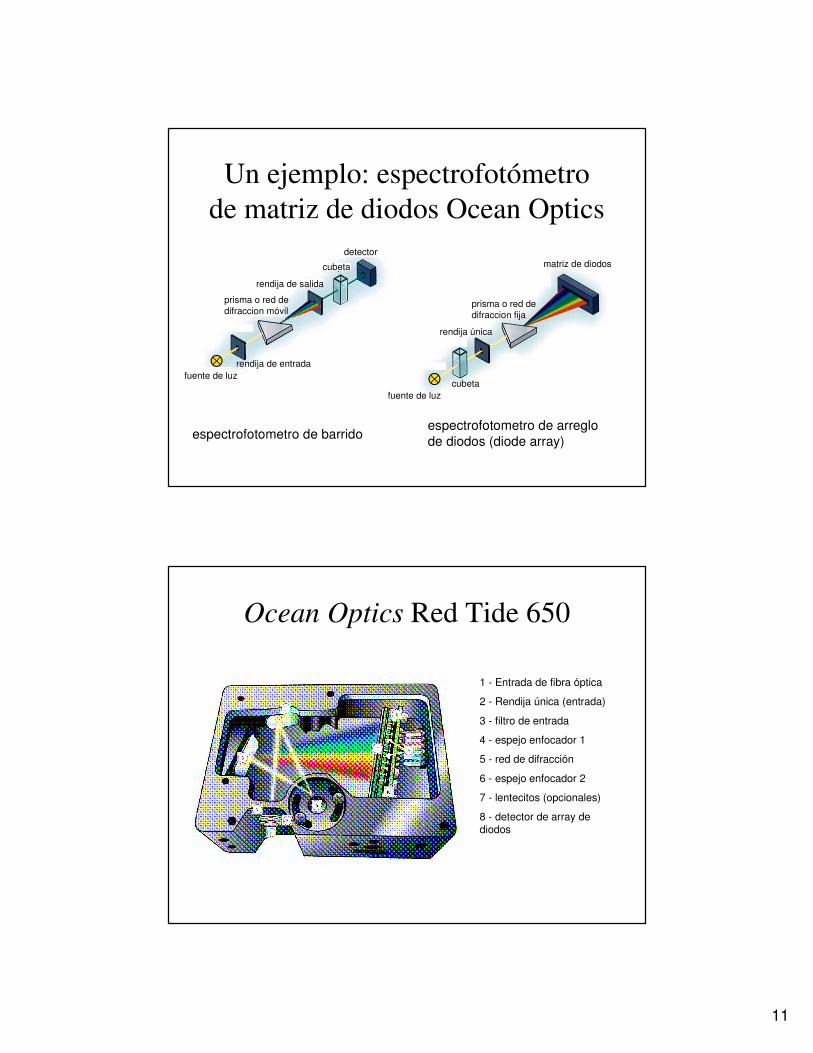
Un ejemplo: espectrofotómetro
de matriz de diodos Ocean Optics
rendija única
fuente de luz
cubeta
prisma o red de
difraccion fija
matriz de diodos
rendija de entrada
detector
fuente de luz
prisma o red de
difraccion móvil
rendija de salida
cubeta
espectrofotometro de barridoespectrofotometro de arreglo
de diodos (diode array)
Ocean Optics Red Tide 650
1 - Entrada de fibra óptica
2 - Rendija única (entrada)
3 - filtro de entrada
4 - espejo enfocador 1
5 - red de difracción
6 - espejo enfocador 2
7 - lentecitos (opcionales)
8 - detector de array dediodos
12
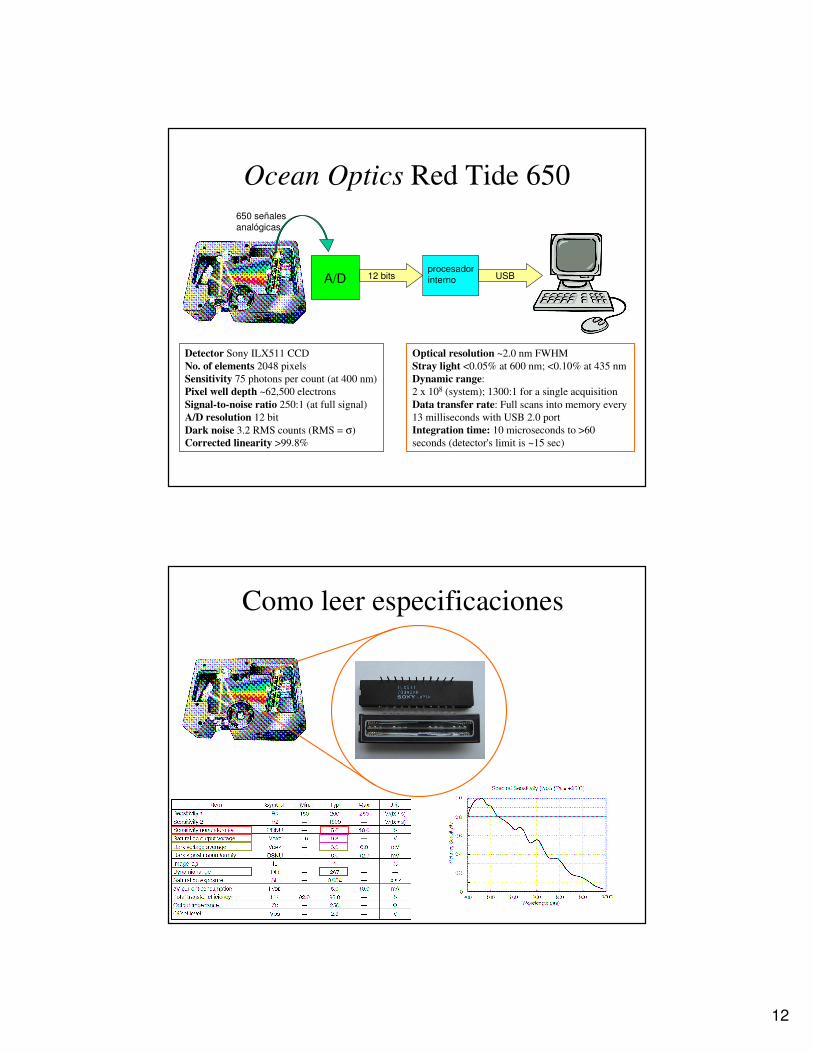
Ocean Optics Red Tide 650
12 bitsA/D
650 señales
analógicas
procesadorinterno USB
Detector Sony ILX511 CCD
No. of elements 2048 pixels
Sensitivity 75 photons per count (at 400 nm)
Pixel well depth ~62,500 electrons
Signal-to-noise ratio 250:1 (at full signal)
A/D resolution 12 bit
Dark noise 3.2 RMS counts (RMS = σ)
Corrected linearity >99.8%
Optical resolution ~2.0 nm FWHM
Stray light <0.05% at 600 nm; <0.10% at 435 nm
Dynamic range:
2 x 108 (system); 1300:1 for a single acquisition
Data transfer rate: Full scans into memory every
13 milliseconds with USB 2.0 port
Integration time: 10 microseconds to >60
seconds (detector's limit is ~15 sec)
Como leer especificaciones
13
Ruido en una medición
Sensitivity 75 photons per count
Pixel well depth ~62,500 electrons
62500 / 75 = 833 cuentas al maximo de luz
(suponiendo 1 foton por electron)
Dark noise 3.2 RMS counts
(suponemos ruido como σ = 3.2 cuentas)
Promediando muchos espectros
El ruido se reduce
en un factor de n1/2
a expensas del
tiempo de
medición.
14
Promediando pixels contiguos
El ruido se reduce en
un factor de n1/2 a
expensas del
ensanchamiento de
las bandas.
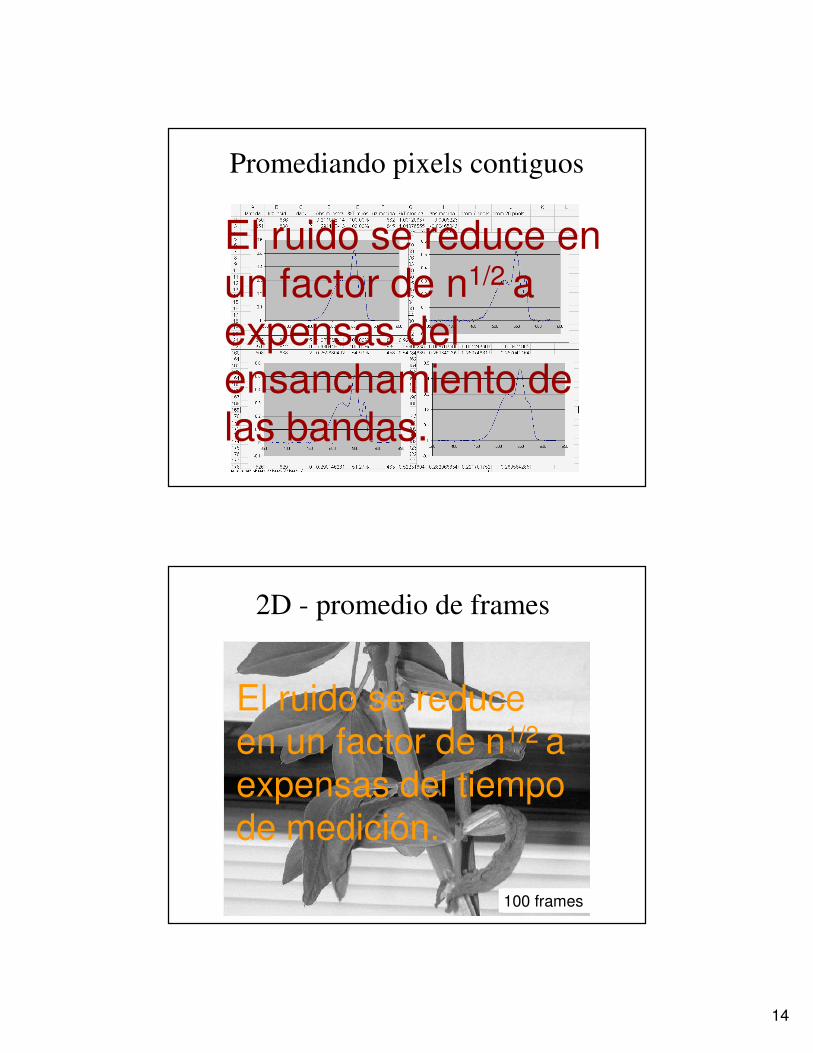
2D - promedio de frames
El ruido se reduce
en un factor de n1/2 a
expensas del tiempo
de medición.
1 frame16 frames100 frames
15
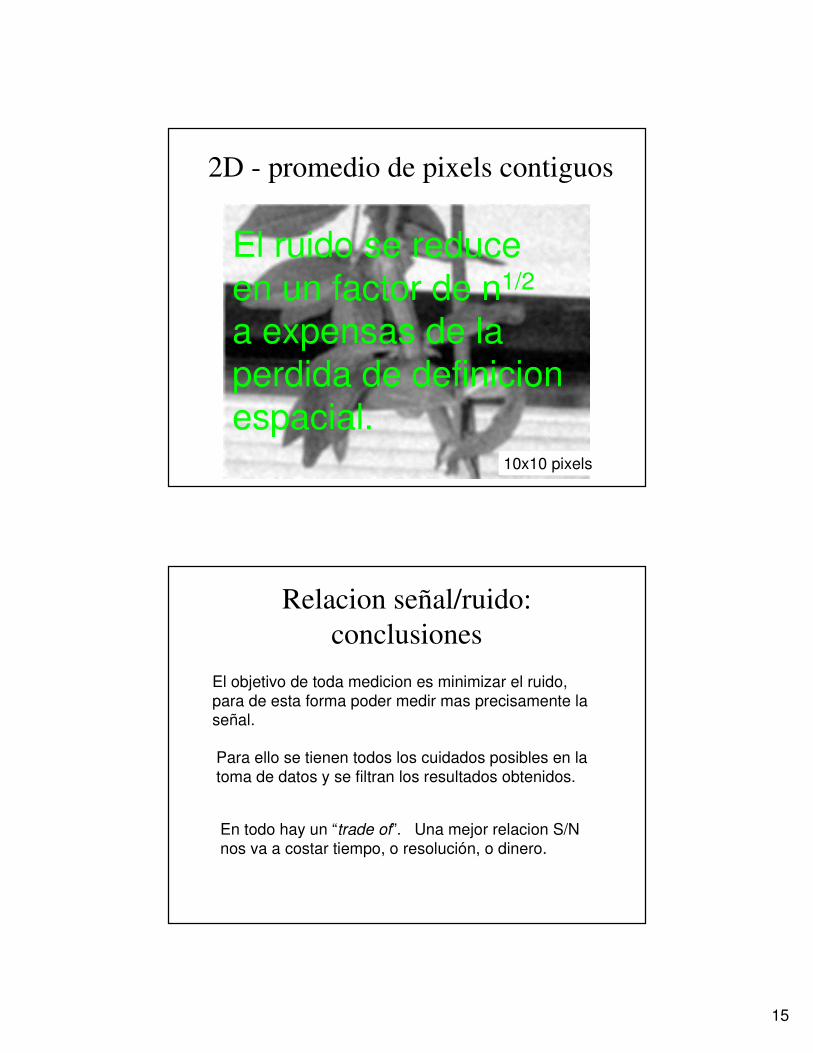
2D - promedio de pixels contiguos
El ruido se reduce
en un factor de n1/2
a expensas de la
perdida de definicionespacial.
no prom4x4 pixels10x10 pixels
Relacion señal/ruido:
conclusiones
El objetivo de toda medicion es minimizar el ruido,
para de esta forma poder medir mas precisamente laseñal.
Para ello se tienen todos los cuidados posibles en la
toma de datos y se filtran los resultados obtenidos.
En todo hay un “trade of”. Una mejor relacion S/N
nos va a costar tiempo, o resolución, o dinero.