Morfología del robot
21
Fundamentos de Robótica www.espol.edu.ec www.fiec.espol.edu
-
Upload
felix-rivas -
Category
Technology
-
view
4.515 -
download
1
Transcript of Morfología del robot

Fundamentos de Robótica
www.espol.edu.ec
www.fiec.espol.edu

Objetivos del curso
– Introducción al campo de la robótica, presentar la estructura básica de un robot.
– Consideraciones básicas para el diseño y prototipo de un robot móvil.
– Fomentar habilidades en la solución a problemas de diseño y prototipo de robots móviles.
– Familiarizar con los elementos y técnicas para la construcción de un robot móvil.
– Mostrar los diferentes enfoques de programación.
– Vincular al estudiante con proyectos de carácter interdisciplinario.

Contenido General
1. Introducción a la robótica2. Morfología del robot3. Diseño y prototipo de un robot4. Sensores5. Mecánica del robot6. Motores7. Poder8. Programando el robot

Textos guías
– Mobile Robots: Inspiration to Implementation. Joseph L. Jones, Anita M. Flynn, Bruce A. Seiger; Ed. A K Peters; 2da edicion.
– The Robot Builder’s Bonanza; Gordon McComb; McGraw-Hill; 2da ed. 2001

Horario
Paralelo 1 Lunes 07H30 – 11H30Paralelo 2 Martes 07H30 – 11H30Paralelo 3 Miercoles 07H30 – 11H30Paralelo 4 Jueves 07H30 – 11H30
Teoría: 08H00 – 10H00Práctica: 10H00 – 12H00

Políticas de Evaluación
10030402010Segunda Eval.
10040302010Primera Eval.
TOTALExamenProyectoPrácticasDeberLecc.

Prácticas: Trabajo en equipo.Cada grupo conformado por 4 estudiantes.a) Kits Lego MindStorms - Programación: NXC.b) Componentes electrónicos. Pic’s. Programación: C,C++
Proyectos:El proyecto se lo realizará por grupos.Proyectos propuestos por el profesor o por el estudiante.
Políticas de Evaluación

Contenido General
1. Introducción a la robótica
2. Morfología del robot
3. Diseño y prototipo de un robot
4. Sensores
5. Mecánica del robot
6. Motores
7. Poder
8. Programando el robot

Introducción a la Robótica
Definición de robot
?

Introducción a la Robótica
Definición de robot
“Manipulador multifuncional reprogramable diseñado para mover materiales, partes, herramientas o dispositivos específicos mediante trayectorias variables programado para realizar diferentes tareas” [Instituto de Robótica de América]
“Máquina de manipulación automática, reprogramable y multifuncional con tres o más ejes que pueden posicionar y orientar materias, piezas, herramientas o dispositivos especiales para la ejecución de trabajos diversos en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento” Federación Internacional de Robótica]
“Conexión inteligente de percepción a acción” [Jones y Flynn]
“Una máquina programable capaz de percibir y actuar en el mundo con cierta autonomía” [Sucar]

Introducción a la Robótica
La palabra robot proviene del checo “robota” (siervo, trabajo forzado). Fue introducida por el escritor Karel Capek en 1921 en la obra “R.U.R.” Rosumm´s Universal Robots
Isaac Asimov publica contribuyó al establecimiento del término Robot. En su obra “Runaround” en 1942 se utilizó por primera vez la palabra robótica, Introdujo las 3 leyes de la robótica:
• Un robot no puede dañar a un ser humano o, por omisión, permitir que sufra algún daño.
• Un robot debe obedecer las órdenes recibidas del humano, excepto si entran en conflicto con la primera ley.
• Un robot debe proteger su propia existencia, excepto cuando no se cumple con las dos leyes anteriores.

Introducción a la Robótica
Antecedentes históricos
Los robots son anteriores a nuestro milenio.Forman parte de los pensamientos y reflexiones de grandes pensadores de nuestra historia.
Son la imagen del esclavo ideal:Eficiente, obediente. Una extensión de nosotros mismos para la realización de áreas aburridas.
Los primeros robots aparecen en la mitología griega y en obras de ficción:– Talos, gigante de bronce que vigilaba Creta– Golem, protector de los judíos en Praga
El Golem no necesitaba comer, beber o descansar. Realizaba las tareas más fatigosas sin mostrar en ningún momento cansancio. Pero no era inteligente y había que tener cuidado al darle las órdenes, porque las interpretaba literalmente

Introducción a la Robótica
Antecedentes históricos
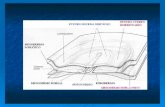
Herón de Alejandría (90 a.C.) Dispositivos automáticos basados en poleas y palancas. Autómato (autómata): máquina que imita la figura y movimientos de un ser animado.

Introducción a la Robótica
Antecedentes históricos
Revolución industrial (Siglo XVIII - XIX) Jaquard (1801) Telar programable mediante cinta de papel perforada.Maillardet (1805) Autómata capaz de hacer dibujos

Introducción a la Robótica
Antecedentes históricos
Pierre Jacquet-Droz (comienzos Siglo XVIII) Autómatas en forma de androides. (La Pianista, El Dibujante, El Escritor )
Jacques de Vaucanson Pato que graznaba, comía, bebía y chapoteaba en el agua.

Introducción a la Robótica
Antecedentes históricos
Industrialización, producción en cadena, Segunda Guerra Mundial (Siglo XX) MIT (1952) Máquina de control numérico.George Devol (1954) Patenta brazo robótico programable George Devol , Joe Engleberger (1956) Fundan Unimation Corporation, lanzan al mercado los primeros robots.(1960) Unimate: primer robot industrial

Introducción a la Robótica
Antecedentes históricos
Diversas universidades (~1964) Inicio de estudios de la Inteligencia Artificial en la robótica.(1970) Robots industriales controlados por ordenador.JIRA: Japan Industrial Robot Association (1972) Primera Asociación

Estado ActualRobots comerciales: cortacésped, aspirador, limpiador de piscinas, juguetes, militares.
Robótica en investigación: humanoides, coordinación entre robots, percepción.
Estado Futuro 2010 electrodomésticos 2020 robots de propósito general2040 primates robóticosInteracción con humanosAprendizaje, adaptación->Cyborg->Nanorobótica
Introducción a la Robótica

De robots industriales ...• Tarea repetitiva• Entorno estructurado• No hay interacción con personas• Poca flexibilidad• Poca movilidad
… a robots de servicio• Ambientes desconocidos• Ambientes dinámicos• Necesidad de movilidad• Interacción con personas• Ambientes exteriores• Necesidad de flexibilidad
Introducción a la Robótica

Introducción a la Robótica
Áreas del conocimiento
• Ingeniería mecánica• Ingeniería eléctrica / electrónica• Control• Computación• Inteligencia artificial• Visión por computador• Biología

Trabajo en Clase
Escoger dos acontecimientos trascendentales de la historia de la robótica, investigar en grupo detalles al respecto, preparar una presentación y exponer.